ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] В этой заявке РСТ заявлен приоритет предварительной патентной заявки США №61/831,685, поданной 6 июня 2013, которая полностью включена в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение в общем относится к системам и способам выполнения процедуры определения рефракции при оптометрическом обследовании и, в частности, к системам и способам для выполнения обследований для измерения рефракционной ошибки.
УРОВЕНЬ ТЕХНИКИ
[0003] Процедуры определения рефракции при оптометрических обследованиях используют для идентификации различных состояний, таких как рефракционная ошибка глаза. Рефракционная ошибка глаза (аметропия) является дефектом способности глаза фокусировать параллельные лучи света от отдаленных объектов на сетчатке. Отдаленный объект обычно рассматривается на расстоянии шести метров или больше от исследуемого глаза. Рассматриваемый объект обычно является знаком, таким как буква, цифра и т.п. заданного размера, представленным на панели или экране. Типы рефракционной ошибки включают близорукость, дальнозоркость и астигматизм.
[0004] Рефракционная ошибка глаза может быть оценена с использованием субъективных или объективных способов. Объективные способы требуют, чтобы профессиональный эксперт выполнил обследование глаза пациента с использованием специального оборудования, предназначенного для определения рефракционной способности глаза пациента, и предписал соответствующую линзу (линзу очков и/или контактную линзу) для каждого глаза.
[0005] Субъективный способ требует, чтобы пациент ответил на конкретные вопросы относительно четкости букв/мишеней, представленных на диаграмме на расстоянии 6 метров. Эксперт вставляет линзы с различной преломляющей силой на расстоянии приблизительно 12 мм от глаза пациента, и пациента просят указать изменения в четкости знаков путем ответов на целенаправленные выбранные вопросы. Обычно пациента спрашивают, какая из двух представленных линз обеспечивает улучшенную четкость.
[0006] Цель субъективного способа определения рефракции состоит в нахождении преломляющей силы сферы, а также преломляющей силы и оси цилиндра. Большая часть оптиков и офтальмологов используют кросс-цилиндр в соединении с пробной оправой для подбора очков или фороптером для определения преломляющей силы и оси цилиндра. Субъективный способ определения рефракции требует, чтобы эксперт интерпретировал ответы пациента.
[0007] С другой стороны, в объективном способе определения рефракции глаза ответы пациента не требуются. Пациент играет пассивную роль, в то время как рефракционную ошибку его глаза оценивают различными возможными объективными способами и средствами. Автоматические определение рефракции и ретиноскопия являются широко распространенными способами. Также известны и используются способы, такие как фоторефракция и аберрометрия. Менее точный объективный способ определения рефракции обычно предшествует субъективному способу, который используют для формирования окончательного предписания. Примером оптометрического предписания при минусовом цилиндрическом заключении может служить следующее: «-2,00/-1,00x90» (т.е., сфера: -2,00, цилиндр: -1,00, ось: 90°). Иными словами, преломляющая сила дальнего цилиндра составляет -2,00 дптр при 180° и преломляющая сила ближнего цилиндра составляет -3,00 дптр при 90°.
[0008]
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0009] В настоящем изобретении предложен способ измерения рефракционной ошибки глаза субъекта, не требующий средства для рефракционной коррекции. Способ включает этапы, согласно которым:
отображают по меньшей мере одно выбранное динамическое или неподвижное целевое изображение в области отображения, для каждого показанного целевого изображения принимают субъективную обратную связь от субъекта, указывающую, что субъект расположен на максимальном расстоянии наилучшей четкости (MDBA) от целевого изображения из множества расстояний, испытанных субъектом при рассматривании целевого изображения одним его глазом, причем указанное максимальное расстояние наилучшей четкости является максимальным расстоянием, на котором субъект ясно распознает по меньшей мере один знак или визуальный эффект указанного целевого изображения; получают данные, относящиеся к расстоянию между исследуемым глазом субъекта и целевым изображением, по меньшей мере когда субъект достиг максимального расстояния наилучшей четкости, с использованием по меньшей мере одного датчика; оценивают максимальное расстояние наилучшей четкости согласно указанным полученным данным; и вычисляют по меньшей мере один параметр, относящийся к рефракционной ошибке исследуемого глаза, на основании предполагаемого максимального расстояния наилучшей четкости и характеристик показанного по меньшей мере одного целевого изображения с использованием по меньшей мере одного процессора.
[0010] Согласно некоторым вариантам реализации настоящего изобретения, указанное получение данных включает захват по меньшей мере одного изображения лица субъекта, включая исследуемый глаз и эталонную форму известных размеров, посредством камеры, формирующей по меньшей мере один элемент графических данных, причем указанную оценку максимального расстояния наилучшей четкости выполняют путем анализа указанных данных с использованием предназначенного для этой цели программного приложения.
[0011] Согласно некоторым вариантам реализации настоящего изобретения, указанной эталонной формой является временная эталонная форма, взятая с элемента, размещенного поверх неисследуемого глаза.
[0012] Согласно некоторым вариантам реализации настоящего изобретения, указанной эталонной формой является постоянная эталонная форма, причем указанный способ дополнительно включает предварительный процесс калибровки абсолютных размеров указанной постоянной эталонной формы с использованием элемента с временной эталонной формой известных размеров.
[0013] Согласно некоторым вариантам реализации настоящего изобретения, различные целевые изображения используются для исследования рефракционной ошибки одного или большего количества типов из следующего списка: близорукость, дальнозоркость, пресбиопия и астигматизм, включая преломляющую силу цилиндра и ось цилиндра.
[0014] Согласно некоторым вариантам реализации настоящего изобретения, используют предназначенное для этой цели испытательное оптометрическое программное приложение, исполняемое посредством указанного по меньшей мере одного процессора персонального устройства, имеющего пользовательский интерфейс, выполненный с возможностью показа целевых изображений, ввода субъективной обратной связи и других входных данных, инструктирования субъекта и вывода результатов измерений.
[0015] Согласно некоторым вариантам реализации настоящего изобретения, каждое из по меньшей мере одного целевого изображения выбрано из списка, содержащего: по меньшей мере одну однонаправленную мишень, по меньшей мере одну многонаправленную мишень, по меньшей мере одну всенаправленную мишень.
[0016] Согласно некоторым вариантам реализации настоящего изобретения, для многонаправленных и всенаправленных целевых изображений субъект снабжен инструментами пользовательского интерфейса, предоставляющими субъекту возможность маркировать по меньшей мере одну ось, указывающую визуальную четкость по меньшей мере одного визуального эффекта показанного целевого изображения для обеспечения субъективной обратной связи об этом, причем указанная маркировка используется для вычисления оси цилиндра исследуемого глаза, при этом указанная визуальная идентификация эффекта на конкретном расстоянии задает максимальное расстояние наилучшей четкости для данного субъекта.
[0017] Согласно некоторым вариантам реализации настоящего изобретения, при наличии однонаправленного целевого изображения субъекту предлагают указать в качестве максимального расстояния наилучшей четкости максимальное расстояние, на котором ясно виден по меньшей мере один из знаков целевого изображения.
[0018] Согласно некоторым вариантам реализации настоящего изобретения, способ дополнительно включает этап сохранения и/или вывода вычисленного по меньшей мере одного параметра, относящегося к рефракционной ошибке исследуемого глаза.
[0019] Согласно некоторым вариантам реализации настоящего изобретения, по меньшей мере одно целевое изображение содержит по меньшей мере одно из следующего списка:
[0020] целевое изображение, состоящее из одиночного ряда знаков одного цвета, расположенных поверх заданного фона отличного цвета, причем максимальное расстояние наилучшей четкости при использовании данного целевого изображения задано как максимальное расстояние, на котором знаки распознаются субъектом;
[0021] целевое изображение, состоящее из двух рядов знаков, причем каждый ряд содержит знаки, и каждый ряд расположен поверх фона отличного цвета, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором знаки одного из рядов являются расплывчатыми и знаки другого ряда различаются субъектом;
[0022] целевое изображение в форме бабочки, выполненное из криволинейных полос, расположенных поверх фона, причем по меньшей мере некоторые из полос имеют первый цвет, по меньшей мере одна из полос имеет второй цвет, и фон имеет третий цвет, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере одна полоса второго цвета восстанавливает свой исходный цвет при фокусировании;
[0023] двойное цветовое целевое изображение концентрических колец или частей концентрических колец, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере изображение в форме бабочки из изображения в форме концентрических колец является отчетливо видимым;
[0024] цветное целевое изображение концентрических колец, содержащее кольца по меньшей мере одного цвета и фон отличного цвета, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере изображение в форме бабочки из изображения в форме концентрических колец является отчетливо видимым по меньшей мере с одной полосой второго цвета, которая не изменила свой цвет;
[0025] хроматическое целевое изображение солнцевидной формы, выполненное из множества полосчатых элементов, причем каждый элемент содержит по меньшей мере одну наружную полосу одного цвета и среднюю полосу другого цвета, при этом указанные элементы радиально расположены таким образом, что формируют радиально симметричную подобную солнцу форму, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере некоторые из элементов зрительно отчетливо видны без изменения второго цвета;
[0026] целевое изображение с комбинированным хроматическим изображением солнцевидной формы и изображением концентрических колец, причем указанное изображение концентрических колец расположено в центре хроматического изображения колец с возможностью совместного использования той же самой радиальной оси симметрии, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором зрительно отчетливо видны по меньшей мере некоторые из элементов хроматического солнцевидного изображения, и по меньшей мере изображение в форме бабочки из изображения в форме концентрических колец является отчетливо видимым без изменения второго цвета хроматического солнцевидного изображения; и/или
[0027] целевое изображение с уникальным рисунком, на котором основным элементом является эллиптическая наклонная форма, скопированная построчно и поколонно с одновременным чередованием ее цвета в каждом направлении, причем по меньшей мере одна темная линия загораживает полностью или частично по меньшей мере одну часть ряда рисунка или по меньшей мере одну область нарушения основной периодической структуры.
[0028] Согласно некоторым вариантам реализации настоящего изобретения, указанную рефракционную ошибку измеряют способом, включающим: измерение грубо оцененной (RE) эквивалентной преломляющей силы сферы.
[0029] Согласно некоторым вариантам реализации настоящего изобретения, способ дополнительно включает процесс коррекции для исправления преломляющей силы сферы и цилиндра, включающий этапы, согласно которым:
принимают угол астигматизма, преломляющую силу цилиндра и преломляющую силу сферы, полученные из предыдущего обследования субъекта,
отображают целевое изображение с уникальным рисунком в области отображения, повернутое на угол астигматизма пользователя согласно принятому углу астигматизма, причем указанное целевое изображение с уникальным рисунком показывают в области отображения по меньшей мере в двух размерах, при этом каждый размер вычислен на основании принятой преломляющей силы цилиндра и преломляющей силы сферы,
для каждого размера показанного целевого изображения с уникальным рисунком предлагают субъекту подбирать расстояние до целевого изображения до распознавания заданного визуального эффекта, на котором наличие по меньшей мере одного чередующегося зелено-красного рисунка или красно-желтого рисунка является наиболее различимым,
[0030] для каждого размера показанного целевого изображения с уникальным рисунком измеряют расстояние между целевым изображением с уникальным рисунком и исследуемым глазом субъекта, и
[0031] повторно вычисляют преломляющую силу цилиндра и преломляющую силу сферы на основании измеренных расстояний.
[0032] В настоящем изобретении предложена система для измерения рефракционной ошибки глаза субъекта, не требующая средства для рефракционной коррекции. Система содержит:
по меньшей мере одно отображающее устройство, задающее область отображения для показа на ней целевых изображений;
по меньшей мере один датчик для распознавания по меньшей мере одного измеряемого параметра повторяющимся способом, причем указанный параметр обеспечивает возможность прямого или косвенного измерения расстояния между субъектом и областью отображения; и по меньшей мере один процессор, содержащий предназначенное для этой цели приложение, управляющее им, выполненный с возможностью:
[0033] приема данных от указанного датчика в режиме реального времени;
[0034] приема субъективной обратной связи от субъекта посредством пользовательского интерфейса указанного приложения, причем указанная обратная связь включает свидетельство того, что субъект расположен на максимальном расстоянии наилучшей четкости (MDBA) от целевого изображения из множества расстояний, проверенных субъектом, при рассматривании целевого изображения одним глазом субъекта, при этом указанное максимальное расстояние наилучшей четкости является максимальным расстоянием, на котором субъект отчетливо распознает по меньшей мере один знак или визуальный эффект указанного целевого изображения;
[0035] оценки максимального расстояния наилучшей четкости путем оценки расстояния между глазом субъекта и областью отображения, на которой показано целевое изображение, с использованием данных, полученных от датчика; и
[0036] вычисления по меньшей мере одного параметра, относящегося к рефракционной ошибке исследуемого глаза, на основании предполагаемого максимального расстояния наилучшей четкости и характеристик показанного целевого изображения.
[0037] Согласно некоторым вариантам реализации настоящего изобретения, предназначенное для этой цели приложение действует с помощью персонального устройства, содержащего процессор и отображающее устройство, причем указанный по меньшей мере один датчик связан с указанным персональным устройством и управляется указанным персональным устройством.
[0038] Согласно некоторым вариантам реализации настоящего изобретения, предназначенное для данной цели приложение действует с помощью персонального устройства, содержащего процессор, по меньшей мере один датчик и отображающее устройство.
[0039] Согласно некоторым вариантам реализации настоящего изобретения, по меньшей мере один датчик содержит фотокамеру или видеокамеру, управляемую указанным программным приложением и выполненную с возможностью захвата по меньшей мере одного изображения лица субъекта, включая исследуемый глаз, и эталонную форму известных размеров, причем указанную оценку максимального расстояния наилучшей четкости выполняют путем анализа указанных графических данных с использованием предназначенного для этой цели программного приложения.
[0040] Согласно некоторым вариантам реализации настоящего изобретения, указанной Эталонной формой является временная эталонная форма, захваченная с элемента, размещенного поверх неисследуемого глаза.
[0041] Согласно некоторым вариантам реализации настоящего изобретения, указанной эталонной формой является постоянная эталонная форма, причем указанный способ дополнительно включает предварительный процесс калибровки абсолютных размеров указанной постоянной эталонной формы с использованием элемента с временной эталонной формой известных размеров.
[0042] Согласно некоторым вариантам реализации настоящего изобретения, различные целевые изображения используются для исследования рефракционной ошибки одного или большего количества типов из следующего списка: близорукость, дальнозоркость, пресбиопия и астигматизм, включая преломляющую силу цилиндра и ось цилиндра.
[0043] Согласно некоторым вариантам реализации настоящего изобретения, каждое из указанных по меньшей мере одно целевое изображение выбрано из списка, содержащего: по меньшей мере одну однонаправленную мишень, по меньшей мере одну многонаправленную мишень, по меньшей мере одну всенаправленную мишень.
[0044] Согласно некоторым вариантам реализации настоящего изобретения, для многонаправленных и всенаправленных целевых изображений субъект снабжен инструментами пользовательского интерфейса, предоставляющими субъекту возможность маркировать по меньшей мере одну ось, указывающую визуальную четкость по меньшей мере одного визуального эффекта показанного целевого изображения для обеспечения субъективной обратной связи об этом, причем указанная маркировка используется для вычисления оси цилиндра исследуемого глаза, при этом указанная визуальная идентификация эффекта на конкретном расстоянии задает максимальное расстояние наилучшей четкости для данного субъекта.
[0045] Согласно некоторым вариантам реализации настоящего изобретения, для однонаправленного целевого изображения субъекту предлагают указать в качестве максимального расстояния наилучшей четкости максимальное расстояние, на котором ясно виден по меньшей мере один из знаков целевого изображения.
[0046] Согласно некоторым вариантам реализации настоящего изобретения, система дополнительно содержит запоминающее устройство для сохранения вычисленного по меньшей мере одного параметра, относящегося к рефракционной ошибке исследуемого глаза.
[0047] В настоящем изобретении предложен способ измерения рефракционной ошибки глаза субъекта, не требующий средства для рефракционной коррекции. Способ включает этапы, согласно которым:
выполняют предварительное испытание для грубой оценки визуальной четкости каждого исследуемого глаза субъекта,
выполняют испытание на ошибку дальнего цилиндра с использованием по меньшей мере одного целевого изображения, имеющего многонаправленную или всенаправленную симметрию, для обнаружения оси цилиндра и
выполняют испытание на ошибку дальнего и ближнего цилиндров с использованием по меньшей мере одного целевого изображения, имеющего однонаправленную или многонаправленную или всенаправленную симметрию, для обнаружения преломляющей силы цилиндра, причем каждое из указанных испытаний включает этапы, согласно которым:
[0048] отображают по меньшей мере одно выбранное динамическое или неподвижное целевое изображение в области отображения,
[0049] для каждого показанного целевого изображения принимают субъективную обратную связь от субъекта, указывающую, что субъект расположен на максимальном расстоянии наилучшей четкости (MDBA) от целевого изображения из множества расстояний, испытанных субъектом при рассматривании целевого изображения одним его глазом, причем указанное максимальное расстояние наилучшей четкости является максимальным расстоянием, на котором субъект ясно распознает по меньшей мере один знак или визуальный эффект указанного целевого изображения,
[0050] получают данные, относящиеся к расстоянию между исследуемым глазом субъекта и целевым изображением, по меньшей мере когда субъект достиг максимального расстояния наилучшей четкости, с использованием по меньшей мере одного датчика,
[0051] оценивают максимальное расстояние наилучшей четкости согласно указанным полученным данным и
[0052] вычисляют по меньшей мере один параметр, относящийся к рефракционной ошибке исследуемого глаза на основании предполагаемого максимального расстояния наилучшей четкости и характеристик показанного по меньшей мере одного целевого изображения с использованием по меньшей мере одного процессора.
[0053] Согласно некоторым вариантам реализации настоящего изобретения, предварительное испытание сконфигурировано с возможностью грубого измерения эквивалентной преломляющей силы сферы (SEP) исследуемого глаза.
[0054] Согласно некоторым вариантам реализации настоящего изобретения, испытание на ошибку дальнего цилиндра выполняют путем использования хроматического солнцевидного целевого изображения, выполненного из множества полосчатых элементов, причем каждый элемент содержит по меньшей мере одну наружную полосу одного цвета и среднюю полосу другого цвета, при этом указанные элементы радиально расположены таким образом, что формируют радиально симметричную подобную солнцу форму, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере некоторые из элементов зрительно отчетливо видны без изменения исходного цвета,
[0055] причем для многонаправленных и всенаправленных целевых изображений субъект снабжен инструментами пользовательского интерфейса, предоставляющими субъекту возможность маркировать по меньшей мере одну ось, указывающую визуальную четкость по меньшей мере одного визуального эффекта показанного целевого изображения для обеспечения субъективной обратной связи об этом, причем указанная маркировка используется для вычисления оси цилиндра исследуемого глаза, при этом указанная визуальная идентификация эффекта на конкретном расстоянии задает максимальное расстояние наилучшей четкости для данного субъекта.
[0056] Согласно некоторым вариантам реализации настоящего изобретения, испытание на ошибку ближнего цилиндра выполняют путем использования сформированного целевого изображения в форме бабочки, выполненного из криволинейных полос, расположенных поверх фона, причем по меньшей мере некоторые из полос имеют первый цвет, по меньшей мере одна из полос имеет второй цвет, и фон имеет третий цвет, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере одна полоса второго цвета отчетливо видна без изменения ее цвета.
[0057] Согласно некоторым вариантам реализации настоящего изобретения, способ дополнительно включает по меньшей мере одно из:
по меньшей мере одного уточняющего испытания на уточнение измерений указанной ошибки дальнего цилиндра;
по меньшей мере одного уточняющего испытания на уточнение измерений указанной ошибки ближнего цилиндра; и
по меньшей мере одного уточняющего испытания на уточнение измерений указанной оси ближнего цилиндра.
[0058] Согласно некоторым вариантам реализации настоящего изобретения, уточняющее испытание для измерения ошибки дальнего цилиндра выполняют с использованием по меньшей мере одного из следующих целевых изображений:
[0059] целевое изображение, состоящее из одиночного ряда знаков одного цвета, расположенных поверх заданного фона отличного цвета, причем максимальное расстояние наилучшей четкости при использовании данного целевого изображения задано как максимальное расстояние, на котором знаки распознаются субъектом;
[0060] целевое изображение, состоящее из двух рядов знаков, причем каждый ряд содержит знаки, и каждый ряд расположен поверх фона отличного цвета, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором знаки одного из рядов являются расплывчатыми и знаки другого ряда различаются субъектом;
[0061] целевое изображение в форме бабочки, выполненное из криволинейных полос, расположенных поверх фона, причем по меньшей мере некоторые из полос имеют первый цвет, по меньшей мере одна из полос имеет второй цвет, и фон имеет третий цвет, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере одна полоса второго цвета восстанавливает свой исходный цвет при фокусировании;
[0062] двойное цветовое целевое изображение концентрических колец или частей концентрических колец, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере изображение в форме бабочки из изображения в форме концентрических колец является отчетливо видимым;
[0063] цветное целевое изображение концентрических колец, содержащее кольца по меньшей мере одного цвета и фон отличного цвета, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере изображение в форме бабочки из изображения в форме концентрических колец является отчетливо видимым по меньшей мере с одной полосой второго цвета, которая не изменила свой цвет;
[0064] хроматическое целевое изображение солнцевидной формы, выполненное из множества полосчатых элементов, причем каждый элемент содержит по меньшей мере одну наружную полосу одного цвета и среднюю полосу другого цвета, при этом указанные элементы радиально расположены таким образом, что формируют радиально симметричную подобную солнцу форму, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере некоторые из элементов зрительно отчетливо видны без изменения второго цвета;
[0065] целевое изображение с комбинированным хроматическим изображением солнцевидной формы и изображением концентрических колец, причем указанное изображение концентрических колец расположено в центре хроматического изображения колец с возможностью совместного использования той же самой радиальной оси симметрии, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором зрительно отчетливо видны по меньшей мере некоторые из элементов хроматического солнцевидного изображения, и по меньшей мере изображение в форме бабочки из изображения в форме концентрических колец является отчетливо видимым без изменения второго цвета хроматического солнцевидного изображения; и/или
[0066] целевое изображение с уникальным рисунком, на котором основным элементом является эллиптическая наклонная форма, скопированная построчно и поколонно с одновременным чередованием ее цвета в каждом направлении, причем по меньшей мере одна темная линия загораживает полностью или частично по меньшей мере одну часть ряда рисунка или по меньшей мере одну область нарушения основной периодической структуры.
[0067] Согласно некоторым вариантам реализации настоящего изобретения способ дополнительно использует процесс коррекции для исправления преломляющей силы сферы и цилиндра, включающий этапы, согласно которым:
[0068] принимают угол астигматизма, преломляющую силу цилиндра и преломляющую силу сферы, полученные из предыдущего обследования субъекта,
[0069] отображают целевое изображение с уникальным рисунком в области отображения, повернутое на угол астигматизма субъекта согласно принятому углу астигматизма, причем указанное целевое изображение с уникальным рисунком показывают в области отображения по меньшей мере в двух размерах, при этом каждый размер вычислен на основании принятой преломляющей силы цилиндра и преломляющей силы сферы,
[0070] для каждого размера показанного целевого изображения с уникальным рисунком предлагают субъекту подбирать расстояние до целевого изображения до распознавания заданного визуального эффекта;
[0071] для каждого размера показанного целевого изображения с уникальным рисунком измеряют расстояние между целевым изображением с уникальным рисунком и исследуемым глазом субъекта и
[0072] повторно вычисляют преломляющую силу цилиндра и преломляющую силу сферы на основании измеренных расстояний.
[0073] Согласно некоторым вариантам реализации настоящего изобретения, датчиком является по меньшей мере один из датчика близости, датчика акселерометра, камеры или объемного (3D) датчика.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0074] На ФИГ. 1 показана схема максимального расстояния наилучшей четкости (MDBA) 0,414 м для пациента, страдающего миопией с преломляющей силой коррекции рефракционной ошибки очков -2,50 дптр.
[0075] На ФИГ. 2 показана блок-схема системы для измерения рефракционной ошибки глаза субъекта согласно некоторым вариантам реализации настоящего изобретения.
[0076] На ФИГ. 3А-3В показано, как субъект использует интегрированное персональное устройство (смартфон), управляемое предназначенным для этой цели приложением для выполнения самостоятельной проверки на рефракционную ошибку, с использованием камеры в качестве датчика, который обеспечивает возможность измерения расстояния между исследуемым глазом субъекта и целевым изображением, показанным субъекту, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 3А показано, как субъект выполняет процесс предварительной калибровки, используя кредитную карту в качестве элемента эталонной формы; и на ФИГ. 3В показано, как целевое изображение представлено в области отображения сенсорного экрана смартфона для предоставления субъекту возможности регулировать расстояние между его/ее глазом и целевым изображением до достижения максимального расстояния наилучшей четкости (MDBA).
[0077] На ФИГ. 4A-4L показаны целевые изображения различных типов, которые могут быть использованы для обследования согласно различным вариантам реализации настоящего изобретения: на ФИГ. 4А показано целевое изображение, содержащее буквы из повторяющихся диагональных полос, проходящих под определенным углом, на сером фоне; на ФИГ. 4В показано целевое изображение, содержащее буквы из повторяющихся диагональных полос, проходящих под определенным углом, на зеленом фоне; на ФИГ. 4С показано целевое изображение, содержащее буквы из повторяющихся диагональных полос, проходящих под определенным углом, на красном фоне; на ФИГ. 4D показано целевое изображение, содержащее буквы из повторяющихся расплывчатых диагональных полос, проходящих под определенным углом, причем расплывчатый тон полос смешивается с красным фоном; на ФИГ. 4Е показано целевое изображение, содержащее буквы из повторяющихся диагональных полос, проходящих под определенным углом, на синем фоне; на ФИГ. 4F показано целевое изображение, содержащее белые четкие буквы на черном фоне; на ФИГ. 4G показано целевое изображение концентрических белых кругов на черном фоне; На ФИГ. 4Н показано целевое изображение, содержащее повторяющиеся пересекающиеся перпендикулярные белые линии на черном фоне; на ФИГ. 4I показано целевое изображение, содержащее повторяющиеся пересекающиеся перпендикулярные линии на черном фоне, причем горизонтальные линии являются зелеными, а вертикальные линии являются красными; на ФИГ. 4J-4L показано черно-белое (BW) целевое изображение с концентрическими кольцами; на ФИГ. 4J показано изображение в том виде, как оно представлено на экране, при этом на ФИГ. 4K и 4L показано, как изображение воспринимается субъектом, имеющим астигматизм.
[0078] На ФИГ. 5 показана блок-схема способа измерения рефракционной ошибки глаза субъекта согласно некоторым вариантам реализации настоящего изобретения.
[0079] На ФИГ. 6 показана блок-схема процесса предварительной калибровки для измерения постоянной эталонной формы с использованием временной эталонной формы согласно некоторым вариантам реализации настоящего изобретения.
[0080] На ФИГ. 7 показана блок-схема способа измерения для идентификации эталонной формы магнитной полосы кредитной карты путем обнаружения ее двумерных изображений для измерения расстояния согласно некоторым вариантам реализации настоящего изобретения.
[0081] На ФИГ. 8A-8D показана мишень для измерения оси астигматизма с использованием хроматического способа: на ФИГ. 8А показана цветная полосчатая мишень для измерений астигматизма, которая содержит три вертикальные параллельные линии, причем средняя линия является зеленой, и две наружные линии являются красными, на черном фоне, при этом линии разделены известным разделяющим расстоянием; на ФИГ. 8В показана мишень, показанная на ФИГ. 8а, в том виде, в каком она воспринимается субъектом, имеющим угол астигматизма 0° (в минус-цилиндрической записи); на ФИГ. 8С показано, как мишень, представленная на ФИГ. 8А, воспринимается субъектом, имеющим угол астигматизма 45°; и на ФИГ. 8D показано, как мишень, представленная на ФИГ. 8А, будет воспринята субъектом, имеющим астигматизм, который выровнен с направлением представленных цветных полос.
[00821] На ФИГ. 9А-9С показана мишень для измерения оси астигматизма с использованием хроматического способа: на ФИГ. 9А показана цветная полосчатая мишень для измерений астигматизма, которая содержит четыре набора полос, причем каждый набор включает три параллельные красно-зелено-красные полосы, разделенные одинаковым разделительным расстоянием, при этом наборы полос под углом пересекают друг друга на черном фоне; на ФИГ. 9В показано, как мишень, представленная на ФИГ. 9А, будет воспринята субъектом, имеющим угол астигматизма α1; и на ФИГ. 9С показано, как изменение, выполненное в мишени, представленной на ФИГ. 9А, будет воспринято субъектом, для указания угла астигматизма с повышенной угловой точностью.
[0083] На ФИГ. 10 показана блок-схема способа измерения угла цилиндра с использованием хроматического способа согласно некоторым вариантам реализации настоящего изобретения.
[0084] На ФИГ. 11 показана блок-схема способа измерения угла цилиндра с использованием хроматического способа с применением мишени из концентрических колец согласно некоторым вариантам реализации настоящего изобретения.
[0085] На ФИГ. 12 показана блок-схема способа оценки силы цилиндра с использованием мишени, содержащей одномерные признаки, согласно некоторым вариантам реализации настоящего изобретения.
[0086] На ФИГ. 13А и 13В показано, как черно-белые (BW) целевые изображения оптотипических букв могут быть использованы для измерения визуальной четкости согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 13А показано черно-белое целевое изображение оптотипов для измерения близорукости путем измерения эквивалентной преломляющей силы сферы (SEP) глаз субъектов; и на ФИГ. 13В представлена таблица, показывающая, как максимальное расстояние наилучшей четкости грубо коррелируется с размером буквы, и
[0087] На ФИГ. 14А и 14В показано целевое изображение двух наборов черных букв, причем один набор расположен поверх синего фона, и другой набор расположен поверх красного фона, для измерения эквивалентной преломляющей силы сферы глаз субъектов, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 14А показано целевое изображение, представленное на экране для испытания эквивалентной преломляющей силы сферы; и на ФИГ. 14В показано, как целевое изображение, представленное на ФИГ. 14А, будет воспринято субъектом на максимальном расстоянии наилучшей четкости, когда буквы оптотипов на синем фоне будут расплывчатыми, а на красном фоне читаемыми.
[0088] На ФИГ. 15А и 15В показано полосчатое целевое изображение в форме бабочки, содержащее зеленые полосы в форме дуг, расположенные на черном фоне, причем одна из дуговых полос с каждой стороны имеет красный цвет, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 15А показано целевое изображение в форме бабочки в том виде, как оно показано на экране для измерения максимального расстояния наилучшей четкости для ближнего цилиндра; и на ФИГ. 15В показано целевое изображение в форме бабочки в том виде, как оно воспринимается субъектом, перед перемещением на максимальное расстояние наилучшей четкости для ближнего цилиндра, на котором красный цвет имеет желтоватый оттенок. После достижения максимального расстояния наилучшей четкости для ближнего цилиндра желтая дуга приобретает красный цвет.
[0089] На ФИГ. 16А и 16В показано прямое целевое изображение с тремя полосами, включающими зеленые боковые полосы и среднюю красную полосу на черном фоне, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 16А показано целевое изображение, представленное на экране для измерения астигматизма; и на ФИГ. 16В показано целевое изображение в том виде, как оно будет воспринято субъектом, имеющим астигматизм 180°.
[0090] На ФИГ. 17А и 17В показано другое прямое целевое изображение с тремя полосами, содержащее зеленые боковые полосы и среднюю красную полосу на черном фоне, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 17А показано целевое изображение, представленное на экране для измерения астигматизма; и на ФИГ. 17В показано целевое изображение, каким его видит субъект, имеющий астигматизм 180°.
[0091] На ФИГ. 18А и 18В показано цветное "солнцевидное" целевое изображение, содержащее множество комбинированных полосчатых целевых изображений, причем каждая полоса солнцевидного целевого изображения содержит зеленые боковые полосы и среднюю красную полосу на черном фоне, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 18А показано солнцевидное целевое изображение, представленное на экране для измерения астигматизма; и на ФИГ. 18В показано солнцевидное целевое изображение в том виде, как его воспринимает субъект, имеющий астигматизм 180°.
[0092] На ФИГ. 19А и 19В показано комбинированное солнцевидное целевое изображение, содержащее солнцевидную часть и черно-белое изображение концентрических колец в ее середине, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 19А показано комбинированное солнцевидное целевое изображение, представленное на экране для измерения астигматизма; и на ФИГ. 19В показано комбинированное солнцевидное целевое изображение в том виде, как его воспринимает субъект, имеющий астигматизм 180°.
[0093] На ФИГ. 20А и 20В показано цветное целевое изображение "концентрических колец", содержащее множество зеленых колец и одно из колец красного цвета, на черном фоне согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 20А показано целевое изображение концентрических колец, представленное на экране для измерения астигматизма; и на ФИГ. 20В показано целевое изображение концентрических колец в том виде, как его воспринимает субъект, имеющий астигматизм 180°, с маркерной линией, размещенной субъектом поверх изображения в местоположении, указывающем центр формы бабочки, кажущейся наиболее четкой, по свидетельству субъекта в качестве входной обратной связи, на основании чего может быть выведен угол астигматизма субъекта.
[0094] На ФИГ. 21А и 21В показаны два различные целевые изображения, каждое из которых содержит уникальный рисунок для валидационного испытания, также называемого в настоящей заявке как "африканское испытание", согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 21А показано целевое изображение, содержащее чередующиеся наборы рядов желтых и красных эллиптических блоков, расположенных в рядах с наклоном в чередующихся направлениях, причем целевое изображение представляет собой слоистую структуру с двумя верхней и нижней утолщенными черными полосами и средней черной полосой, имеющей уменьшенную толщину, чем верхняя и нижняя полосы; и на ФИГ. 21В показано целевое изображение с уникальным рисунком, на котором основным элементом является эллиптическая наклоненная форма, скопированная построчно и поколонно с одновременным чередованием ее цвета в каждом направлении, причем по меньшей мере одна темная линия загораживает полностью или частично по меньшей мере одну часть ряда рисунка или по меньшей мере одну область нарушения основной периодической структуры. Загораживание или нарушение приводит к идентичности соседнего цвета основного элемента в горизонтальном или в вертикальном направлении. Согласно другому варианту реализации, цвет основного элемента, лежащего в нарушенном ряду или за пределами загороженного ряда, подобен цвету его ближайшего соседа в ненарушенном/незагороженном ряду. При возникновении некоторой расплывчатости изображение имеет несколько различимых особенностей, как показано на изображении 701а.
[0095] На ФИГ. 22 показан увеличенный рисунок основных элементов целевых изображений, показанных на ФИГ. 21А и 21В, наклоненных в одном из возможных чередующихся направлений.
[0096] На ФИГ. 23 показано, как целевое изображение, представленное на ФИГ. 21А, выглядит на расстоянии, на котором субъекту предложено остановиться. Это происходит на конкретном расстоянии, на котором комбинация сферы и цилиндра образуют известную расплывчатость.
[0097] На ФИГ. 24А и 24В показан увеличенный рисунок целевого изображения, показанного на ФИГ. 21А: на ФИГ. 24В показано, как структурные элементы рисунка расплываются (стрелка показывает направление расплывчатости) на расстоянии от целевого изображения для субъекта, не имеющего астигматизма; и на ФИГ. 24А показано, как структурные элементы рисунка расплываются на расстоянии от целевого изображения для субъекта, имеющего астигматизм.
[0098] На ФИГ. 25 показан другой дополнительный структурный элемент рисунка для валидационного испытания согласно другим вариантам реализации настоящего изобретения.
[0099] На ФИГ. 26 показан еще один дополнительный структурный элемент рисунка для валидационного испытания согласно другим вариантам реализации настоящего изобретения.
[00100] На ФИГ. 27А и 27В показана блок-схема полного способа оптометрического испытания на измерение эквивалентной преломляющей силы сферы, а также преломляющей силы дальнего цилиндра и преломляющей силы ближнего цилиндра субъекта, с использованием целевых изображений, описанных выше, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 27В показано продолжение способа, показанного на ФИГ. 27А.
[00101]
ПОДРОБНОЕ ОПИСАНИЕ НЕКОТОРЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[00102] В следующем подробном описании различных вариантов реализации сделана ссылка на сопроводительные чертежи, которые являются частью настоящего описания, и на которых в качестве примеров показаны конкретные варианты реализации, в которых может быть осуществлено настоящее изобретение. Подразумевается, что могут быть использованы другие варианты реализации, и структурные изменения могут быть выполнены без отступления от объема защиты настоящего изобретения.
[00103] В настоящем изобретении согласно некоторым вариантам его реализации предложены способы и системы для предоставления пользователям возможности выполнения точных глазных обследований для измерения рефракционной ошибки их глаз или глаз других людей без использования различных средств для коррекции рефракции, таких как очки или контактные линзы.
[00104] Термин "рефракционная ошибка", также используемый как "ошибка преломления", как известно в уровне техники, относится к любому типу ошибки при фокусировании параллельных лучей света на сетчатке глаза, что также называется "аметропией". Аметропия включает любое одно или большее количество нарушений: близорукость, дальнозоркость и/или астигматизм, обычно категоризованные как сферические ошибки и цилиндрические ошибки. Сферические ошибки включают близорукость, дальнозоркость и пресбиопию, в то время как цилиндрические ошибки включают астигматизм. Путем типичного обследования глаза при выборе корригирующих линз измеряют сферическую рефракцию, степень астигматизма и ось у конкретного глаза.
[00105] Согласно некоторым вариантам реализации, система предоставляет субъекту возможность самостоятельного обследования рефракционной ошибки собственного зрения с использованием встроенного персонального устройства или другого удаленного процессора, или системы, такой как персональные компьютеры (ПК), ноутбук, смартфон, планшетное устройство и т.п., при условии, что указанное личное устройство оборудовано устройствами или связано с устройствами, которые обеспечивают возможность показа изображений, хранения, обработки, ввода и вывода данных, и дополнительно также с использованием одного или большего количества датчиков, которые обеспечивают возможность вычисления расстояния между испытуемым глазом и показываемыми изображениями.
[00106] Система содержит отображающее устройство, выполненное с возможностью визуального отображения целевых изображений на экране отображающего устройства, и один или большее количество датчиков для обеспечения возможности измерения по меньшей мере одного параметра, который может быть использован для вычисления расстояния. Согласно другим вариантам реализации, расстояние может быть измерено непосредственно датчиком (датчиками), в то время как согласно другим вариантам реализации расстояние измеряют с использованием камеры, соединенной с персональным устройством или встроенной в личное устройство, для вычисления расстояния между изображением на отображающем устройстве и испытываемым глазом субъекта.
[00107] Система и способ настоящего изобретения согласно некоторым вариантам его реализации предоставляют пользователю, желающему самостоятельно выполнить обследование на рефракционную ошибку, возможность использования персонального устройства, имеющего визуальное отображающее средство, такое как экран, и датчик, такой как видеокамера и/или фотокамера, причем устройством управляет предназначенное для обследования рефракции глаза программное приложение, выполненное с возможностью: отображения по меньшей мере одного выбранного подвижного или неподвижного целевого изображения в области отображения; приема от субъекта субъективной обратной связи, указывающей, что субъект расположен на максимальном расстоянии наилучшей четкости (MDBA) от целевого изображения из множества расстояний, исследованных субъектом, причем указанным максимальным расстоянием наилучшей четкости является максимальное расстояние, на котором субъект ясно распознает показанное целевое изображение одним из своих глаз, в отношении которого проводится обследование; измерения по меньшей мере одного параметра, ассоциированного с расстоянием, когда субъект достиг максимального расстояния наилучшей четкости, с использованием датчика; оценки максимального расстояния наилучшей четкости путем оценки расстояния между исследуемым глазом субъекта и областью отображения, на которой показано целевое изображение, с использованием данных, полученных от датчика, и посредством процессора персонального устройства для выполнения этой оценки; и вычисления рефракционной ошибки глаза согласно предполагаемому максимальному расстоянию наилучшей четкости и характеристикам целевого изображения.
[00108] После того, как субъект посредством обратной связи с ним указал, что он достиг максимального расстояния наилучшей четкости, система автоматически оценивает фактическое расстояние между исследуемым глазом субъекта и представленным целевым изображением (например, центром экрана) с использованием данных, принятых от датчиков, и дополнительных калибровочных данных, отобранных из процесса предварительной калибровки, для вычисления рефракционной ошибки исследуемого глаза с использованием предназначенного для этой цели алгоритма. Рефракционная ошибка вычисляется на основании предполагаемого максимального расстояния наилучшей четкости (которое является предполагаемым расстоянием между глазом и целевым изображением в момент, когда субъект сам указал на достижение максимального расстояния наилучшей четкости), а также графических и других характеристик одного или большего количества признаков целевого изображения (например, размера, цвета, рисунка и т.п.), причем указанная рефракционная ошибка является, например, результатом преломляющей силы (также, названной в настоящей заявке как " эквивалентная сила сферы" (SEP), и/или преломляющая сила сферы, и/или дальняя сила цилиндра (цил.) и/или ближняя сила цилиндра).
[00109] Отображающим устройством является любое устройство, выполненное с возможностью визуального показа изображения в область отображения, такой как экран, проектор (с экраном или без экрана) и т.п. Отображающее устройство и область отображения могут быть встроены в персональное устройство.
[00110] Датчик, который может быть встроен в персональное устройство или связан с ним в любой другой конфигурации, включает, например, одну или большее количество видеокамер и/или фотокамер, объемного (3D) датчика, выполненных с возможностью картирования поверхности в точках трехмерного пространства, или любой другой оптический датчик или датчик другого типа для измерения одного или большего количества параметров, которые обеспечивают возможность выведения расстояния, или любой другой датчик или устройство, которые обеспечивают возможность захвата изображений или прямого или косвенного измерения расстояния между объектами. Алгоритм в системе для оценки фактического расстояния между исследуемым глазом субъекта и показанным целевым изображением приспособлен для конкретного используемого датчика и его конкретных выходных характеристик. Например, для фотокамеры или видеокамеры алгоритм предназначен для приема вводимых графических данных, поступивших от камеры, и использования эталонного изображения или другого изображения известных размеров в графических данных для вычисления расстояния исследуемого в данный момент глаза в момент захвата изображения камерой.
[00111] Согласно некоторым вариантам реализации, в настоящем изобретении предложено предназначенное для этой цели компьютерное приложение, работающее на персональном устройстве субъекта, которое обеспечивает пользовательский интерфейс (UI), предоставляющий субъекту возможность измерения рефракционной ошибки его собственного глаза. Это означает, что данное приложение не требует примерки субъектом различных корректирующих линз для измерения номера его очков, измерений цилиндра и т.п.
[00112] Приложение может быть разработано таким образом, что оно использует обрабатывающее средство персонального устройства субъекта для всего процесса обследования (включая прием ввода, обработку и вывод результатов измерений и хранение данные) или связывается с удаленным сервером, который выполнен с возможностью приема входных данных через приложение на персональном устройстве субъекта, обработки данных для вычисления рефракционной ошибки исследуемого глаза субъекта и передачи результатов в персональное устройство посредством данного приложения для вывода (например, представления) субъекту посредством средства для вывода в персональном устройстве (например, посредством экрана и/или посредством громкоговорителей устройства).
[00113] Способы и системы согласно некоторым вариантам реализации предоставляют пользователю возможность инициировать субъективную оценку рефракции с использованием собственного персонального устройства путем обращения к предназначенному для этой цели приложению, работающему на этом устройстве (например установленному в персональном устройстве или доступного через персональное устройство). После инициирования данной процедуры динамическое или статическое предварительно отобранное целевое изображение показывается в области отображения. Целевое изображение может быть фигурой или заданным знаком, таким как буква, цифра, и т.п., известное субъекту, причем характеристики изображения, такие как размер, рисунок, цвет, фон и т.п., могут изменяться в зависимости от параметра и/или типа исследуемой рефракционной ошибки, такой как астигматизм, близорукость или дальнозоркость.
[00114] Как указано выше, один или большее количество датчиков, таких как камера, встроенная или соединенная с персональным устройством постоянно или соединяемая периодически, обнаруживает один или большее количество параметров, ассоциированных с расстоянием, и данные одного или большего количества параметров, полученных от датчика, используются для оценки расстояния между исследуемым глазом субъекта и областью отображения, в которой показано выбранное изображение. Пользовательский интерфейс приложения обеспечивает возможность приема субъективной обратной связи от субъекта в отношении показанного изображения для вычисления одного или большего количества значений одного или большего количества измеряемых параметров, указывающих на один или большее количество аспектов рефракционной ошибки исследуемого глаза субъекта, также называемых в настоящем описании результатом (результатами) обследования. Затем эти результаты представляются пользователю или выводятся любым другим способом посредством выходного устройства (устройств) персонального устройства, таким как показ на экране пользовательского интерфейса предназначенного для этой цели приложения.
[00115] Согласно некоторым вариантам реализации настоящего изобретения, процесс калибровки используется, в особенности, но не только, в случаях, в которых датчиком является устройство для захвата двумерных изображений, таких как фото- и/или видеокамера. В этих вариантах реализации применяется эталонная форма известных абсолютных размеров путем использования, например, трехмерного объекта с известными размерами или объекта, имеющего двухмерный физический рисунок, прикрепленный к нему, или напечатанный на нем, который может быть идентифицирован путем визуального анализа полученного изображения, включающего форму эталонного рисунка. Известные размеры эталонной формы могут быть использованы для выведения расстояния между физическим положением эталонной формы и камерой или центром области отображения, связанной с камерой, во время получения данного изображения эталонной формы.
[00116] Этот процесс калибровки может повторяться (непрерывно или дискретно) в ходе процедуры обследования, для чего требуется, чтобы субъект держал эталонную форму в том же самом положении относительно положения исследуемого глаза во время всей процедуры или по требованию пользовательского интерфейса во время выполнения измерений. Таким образом, расстояние между исследуемым глазом и представленным изображением постоянно измеряется или оценивается с использованием других измеренных параметров во время процедуры обследования для достижения самых точных результатов.
[00117] Согласно другим вариантам реализации, в процессе калибровки используется элемент, состоящий из временной эталонной формы, такой как кредитная карта, имеющая магнитную полосу эталонной формы с известными размерами, для исследования абсолютных размеров постоянной эталонной формы, такой как одна или большее количество черт лица субъекта, таких как ширина его глаза (не закрытого временной эталонной формой) для обеспечения возможности использования абсолютного значения черт лица для измерения расстояния в фактической процедуре исследования рефракционной ошибки. Такой подход освобождает субъекта от необходимости удерживать элемент временной эталонной формы в течение всей процедуры.
[00118] Согласно некоторым вариантам реализации, пользовательский интерфейс выполнен с возможностью вывода вопросов для обеспечения обратной связи и инструкций для субъекта, которые определены конкретным представленным целевым изображением и ассоциированы с ним и его характеристиками для облегчения определения конкретной рефракционной ошибки (например, преломляющей силы) в отношении предполагаемого максимального расстояния наилучшей четкости и характеристик целевого изображения.
[00119] Согласно различным вариантам реализации настоящего изобретения, после размещения испытательного знака или любого другого целевого изображения, имеющего выбранный размер, в области отображения приложение требует, чтобы субъект переместил область отображения (встроенную в устройство) или переместился сам относительно области отображения (например, если перемещение области отображения является затруднительным) на максимальное расстояние, на котором он все еще ясно распознает один или большее количество знаков, представленных в целевом изображении с относительной четкостью. Это расстояние будет определено как "максимальное расстояние наилучшей четкости", которое является пропорциональным преломляющей силе (в диоптриях) требуемой корригирующей линзы. Отношение между максимальным расстоянием наилучшей четкости и преломляющей силой "Р" вычисляют с использованием следующей формулы преобразования:
[00120] Преломляющая сила "Р" является или средним из астигматических преломляющих сил субъекта (наилучшей сферой), или одной из астигматических преломляющих сил в зависимости от используемой мишени, которая является формой или рисунком представленного изображения. Например, мишень без признаков, обусловленных направленностью, вызовет фокусирование на расстоянии, соответствующем среднему значению астигматических преломляющих сил, а мишень с признаками в направлении одной из астигматических осей вызовет фокусирование на расстоянии, соответствующем этой астигматической преломляющей силе. Калибровочная постоянная К определена путем клинических испытаний и приблизительно составляет -1.
[00121] Согласно некоторым вариантам реализации, субъекту предлагают оставить неисследуемый глаз открытым (который в то же время закрыт элементом с эталонной формой, например, кредитной картой) во время процедуры измерения, поскольку он может влиять на рефракционную ошибку исследуемого глаза.
[00122] На фиг. 1 показана схема определения максимального расстояния наилучшей четкости (MDBA), в данном случае составляющего 0,414 м для близорукого пациента, носящего очки с корректирующей силой рефракционной ошибки -2,50 дптр [D].
[00123] Датчик системы расположен на фиксированном известном расстоянии от области представленного изображения, поскольку каждое из этих двух устройств (например экрана и камеры) зафиксированы в определенном положении.
[00124] Если рефракционная коррекция не установлена, расслабленный глаз, соответствующий, например, коррекции контактных линз -2,50, будет видеть расплывчатое изображение на расстоянии более чем 0,4 м, и первое визуальное изображение высокой четкости он увидит на расстоянии, равном 0,4 м. Изображение на расстоянии, заданном в этом диапазоне (от бесконечности до 400 мм в настоящем примере), будет расплывчатым в зависимости от вергентности (1/Расстояние до объекта [м]), причем максимальная расплывчатость будет наблюдаться на бесконечном расстоянии, и расплывчатость будет постепенно уменьшаться вместе с вергентностью, при этом минимальная расплывчатость будет достигнута на расстоянии 0,4 м. Расплывчатость изображения на расстоянии ближе чем 0,4 м согласно данному варианту реализации будет зависеть от способности глаза к аккомодации. Если присутствует аккомодация +7 диоптрий, субъект может видеть изображение с высокой визуальной четкостью на расстоянии в диапазоне от 400 мм до 105 мм.
[00125] На фиг. 2 показана функциональная схема системы 100 для измерения рефракционной ошибки глаза субъекта с использованием автоматизированной системы, содержащей по меньшей мере один процессор 110, такой как компьютерная система ПК, планшетное устройство или мобильное устройство, имеющее средства для ввода и вывода, и датчик 120, такой как камера, которая выполнена с возможностью получения двумерных кадров, и экран 130 в качестве отображающего устройства, ограничивающего размещенную на нем область 135 отображения.
[00126] Процессор 110 выполняет предназначенное для этой цели приложение, выполненное с возможностью управления несколькими блоками: (i) пользовательским интерфейсом (UI) 111; (ii) оценивающим расстояние и калибрующим блоком 112 для периодической (непрерывной или дискретной) оценки расстояния между исследуемым глазом и отображающим устройством, на котором присутствует/посредством которого представляют целевое изображение; (iii) блоком 113 обратной связи для подачи субъекту команды во время процедуры обследования и для предоставления субъекту возможности вводить данные в качестве обратной связи; и блоком 114 рефракционной ошибки для вычисления значения (значений) параметра (параметров) рефракционной ошибки согласно предполагаемому расстоянию и характеристикам представленных целевых изображений.
[00127] Согласно некоторым вариантам реализации, пользовательский интерфейс 111 может быть графическим пользовательским интерфейсом (GUI) предназначенного для этой цели приложения, выполненным с возможностью обеспечения платформы для фиксированного или динамического представления целевых изображений, позволяющим субъекту инициировать процедуры обследования, подающим субъекту команду во время процедуры обследования, предоставляющим субъекту возможность вводить данные субъективной обратной связи в ответ на представленное целевое изображение и/или его местоположение по отношению к данному изображению, а также для представления результатов вычисления рефракционной ошибки.
[00128] Согласно некоторым вариантам реализации, оценивающий расстояние и калибрующий блок 112 выполнен с возможностью инструктирования субъекта, чтобы он разместился сам или разместил отображающее устройство/область 130/135 на максимальном расстоянии наилучшей четкости согласно его субъективному восприятию, и приема данных от датчика 120 для их обработки для выведения (оценки) расстояния "Di" между исследуемым глазом субъекта и целевым изображением в каждый данный момент или период времени. В случаях, в которых выходным сигналом датчика 120 является изображение (например, в случае использования двумерной камеры), может быть инициирован процесс анализа изображения для оценки расстояния путем измерения размера изображения фигуры в полученном изображении, которая имеет известные размеры. В этих случаях оценивающий и калибрующий блок 112 (посредством пользовательского интерфейса 111) может предложить субъекту закрыть эталонной формой с известными двумерными размерами (такой как кредитная карта с магнитной полосой, имеющей стандартный размер, причем магнитная полоса обращена к датчику 120 камеры) его неисследуемый глаз таким образом, чтобы изображение, полученное датчиком 120 камеры, включало всю двумерную эталонную форму с известными размерами в каждый данный момент обследования. Таким образом, различие между размером изображения эталонной формы и ее известным реальным размером обеспечивает возможность выведения расстояния и угловой перспективы по меньшей мере между камерой и физическим элементом, который является двумерной эталонной формой или содержит такую двумерную эталонную форму. Эти расстояние и угол, в свою очередь, обеспечивают возможность оценки расстояния между исследуемым глазом, расположенным рядом с глазом, закрытым элементом с эталонной формой, и центром области отображения, благодаря известному расположению области отображения относительно датчика камеры.
[00129] В случаях использования двумерного датчика 120 для улучшения точности оценок расстояния может потребоваться предварительный калибровочный процесс путем получения изображения субъекта, удерживающего элемент с эталонной формой, закрывающий его неисследуемый глаз, измерения абсолютных размеров и формы исследуемого глаза путем процесса исследования изображения в соответствии с известными абсолютными размерам эталонной формы. В этих вариантах реализации, если вычислены абсолютные размеры и форма исследуемого глаза, сам исследуемый глаз служит в качестве эталонной формы в процессе обследования.
[00130] Например, субъекту может быть предложено удерживать кредитную карту поверх одного из его глаз с магнитной полосой на кредитной карте, обращенной к камере, для предварительной калибровки процедуры обследования и получения изображения калибровки с захватом обоих глаз (один из которых закрыт картой) с использованием камеры. Абсолютная ширина и длина магнитной полосы кредитной карты обычно являются стандартными и известны системе. Затем полученное калибровочное изображение анализируют, например, путем вычисления шкалы отношений (для ширины, длины и/или ширины), в результате чего может быть выведена абсолютная ширина исследуемого глаза. Данное значение ширины глаза (EW) (например, в сантиметрах) может быть сохранено в запоминающем устройстве системы и использовано как известный размер исследуемого глаза в качестве эталонной формы для конкретной процедуры. Такой подход позволяет использовать отдельный элемент эталонной формы только на исходном этапе калибровки обследования, но не в течение всего обследования, и, в качестве варианта, для каждого из глаз субъекта (поскольку их размер не изменяется в течение длительного времени), причем эти значения могут постоянно храниться для использования в множестве глазных обследований в течение длительного времени для того же самого субъекта.
[00131] Согласно некоторым вариантам реализации, блок 113 обратной связи выполнен с возможностью подачи инструкций субъекту и также для предоставления пользователю (который сам может быть субъектом) возможности введения информации обратной связи, например, для обозначения момента, когда он достиг максимального расстояния наилучшей четкости согласно его субъективной оценке, а также для выдачи результирующей ошибки рефракции (преломляющей силы) соответствующего исследуемого глаза.
[00132] Согласно некоторым вариантам реализации, механизм обратной связи для обозначения момента, когда субъект достиг максимального расстояния наилучшей четкости, может включать, например, идентификацию удаления кредитной карты или любого другого элемента эталонной формы (например, в случае использования видеокамеры), сопровождаемую идентификацией двух глаз, расположенных в области эталонной формы перед ее удалением, с использованием датчика камеры и блока процессора.
[00133] Согласно некоторым вариантам реализации, блок 114 вычисления рефракционной ошибки выполнен с возможностью приема измеренного максимального расстояния наилучшей четкости и другие измеренные данные от оценивающего расстояние и калибрующего блока 112 и вычисления рефракционной ошибки исследуемого глаза на основании значения максимального расстояния наилучшей четкости и характеристик представленной мишени, в то время, когда был измерен параметр датчика, относящийся к максимальному расстоянию наилучшей четкости. Затем вычисленная рефракционная ошибка исследуемого глаза сообщается субъекту посредством пользовательского интерфейса 111 (например, путем использования визуального представления этой ошибки в области 135 отображения). Результирующая рефракционная ошибка также может быть передана после выбора пользователя для заказа очков посредством сети Интернет (с использованием средства для обмена данными в персональном устройстве пользователя) с корригирующими линзами согласно результатам обследования. В этом случае пользовательский интерфейс 111 также содержит платформу для заказа, предоставляющую субъекту возможность размещения заказа, выбора оправы для очков, оплаты и т.п.
[00134] Согласно некоторым вариантам реализации, результаты процедуры измерений обследования глаза могут быть переданы третьему лицу вместо или в дополнение к представлению результатов субъекту.
[00135] На фиг. 3А-3В показано, как субъект применяет комплексное персональное устройство, например, смартфон 200, содержащий предназначенное для этой цели приложение, работающее на смартфоне для выполнения самостоятельного измерения рефракционной ошибки согласно некоторым вариантам реализации настоящего изобретения. Смартфон 200 содержит камеру 220 и сенсорный экран 250, встроенный в него, и обычно также микрофон и громкоговоритель для ввода и вывода звуковых данных,
[00136] На фиг. 3А показано, как может быть реализован процесс калибровки путем удерживания субъектом 50 элемента 20 эталонной формы, содержащего эталонную форму 21, имеющую известные размеры, поверх неисследуемого глаза субъекта таким образом, что элемент 20 закрывает этот глаз. Эталонную форму 21 используют для вычисления абсолютной ширины "d2" исследуемого глаза и, по выбору, также его длины.
[00137] Субъекта просят (например, с использованием звукового средства, т.е., громкоговорителя смартфона) удерживать или расположить смартфон в удаленном положении, в котором он еще уверенно идентифицирует знак по существу с хорошей четкостью, и камера 220 захватывает одно или большее количество двумерных изображений исследуемого глаза, как только пользователь указывает на достижение точки максимального расстояния наилучшей четкости, или в течение позиционирования, включая время указания. Такой подход обеспечивает возможность оценки приложением расстояния "d1" (показанного на фиг. 3В) между исследуемым глазом 50а и представленным целевым изображением в момент времени, когда субъект достиг максимального расстояния наилучшей четкости, и, таким образом, вычисления рефракционной ошибки.
[00138] Как указано выше, для выведения или непосредственного измерения расстояния от исследуемого глаза до целевого изображения, которое показано субъекту, могут быть использованы измерительные датчики различных типов, такие как камера (видео и/или фото), детекторы объемных изображений, акселерометр, датчик близости, и т.п. Алгоритм, используемый приложением для выведения расстояния, зависит от типа используемого датчика и типа и формата данных, выработанных таким образом. В следующем параграфе описаны неограничивающие примеры обработки данных от датчика каждого типа для выведения расстояния:
[00139] Датчик объемного изображения:
Датчик объемного изображения картирует объект Obj в набор точек {xi, yi, zi} в трехмерных Декартовых координатах (например, с использованием проецируемых структур, форма которых зависит от расстояния, путем формирования расстояния из дефокусировки, с использованием стереоскопической триангуляции, и т.п.). Следовательно, для обнаружения особенности глаза внутри "Obj" может быть применен алгоритм для обнаружения глаза (или любого другого элемента лица), и расстояние от глаза до мишени может быть вычислено как  , где {x0,y0,z0} представляет собой местоположение мишени в тех же самых Декартовых координатах, и к указывает дискретную точку на глазном яблоке, полученную датчиком объемного изображения.
, где {x0,y0,z0} представляет собой местоположение мишени в тех же самых Декартовых координатах, и к указывает дискретную точку на глазном яблоке, полученную датчиком объемного изображения.
[00140] Датчик близости:
Датчик близости является датчиком, способным обнаруживать наличие соседних объектов без физического контакта. Датчик близости часто излучает электромагнитное поле или луч электромагнитного излучения (например, инфракрасного), и ищет изменения в поле или отраженном сигнале. Данные датчика близости в номинальном диапазоне могут быть использованы для уточнения результатов измерения на коротких расстояниях, т.е., для повышения точности другого способа, используемого для оценки расстояния от глаза до мишени. Данные от датчика близости также могут быть использованы для исключительного определения расстояний в номинальном диапазоне. Этот датчик может непосредственно измерять расстояния между датчиком и объектом, на который он направлен, для обеспечения возможности выведения расстояния между исследуемым глазом и целевым изображением, на основе имеющейся информации о фиксированном местоположении области отображения относительно датчика.
[00141] Акселерометр:
Акселерометр представляет собой датчик, который вырабатывает данные об ускорении в данный момент времени. Расстояние в любой данный момент времени может быть вычислено посредством вычислительного блока после удовлетворения двух заданных условий. Для выведения расстояния между исследуемым глазом и показываемым целевым изображением обработка данных, полученных от акселерометра, может включать процедуру калибровки исходного расстояния x0 от глаза до мишени.
[00142] Калиброванное исходное расстояние от глаза до мишени может быть установлено равным нулю во время удерживания смартфона рядом с глазом в начале измерения. Субъект, удерживающий смартфон или любое другое устройство, содержащее акселерометр, поддерживает устойчивое фиксированное положение головы с одновременным перемещением устройства с акселерометром назад и вперед. Расстояние в любой данный момент может быть вычислено согласно следующим параметрам:
ax(t) = данные ускорения от датчика ускорения
х0 = калиброванное исходное расстояние от глаза до мишени

[00143] Тем же самым способом данные от акселерометра могут быть применены к ay(t) и az(t) для оценки y(t') и z(t'), где вектор смещения:
 .
.
[00144] Акселерометр может быть использован отдельно или в соединении с другими измеряющими расстояние датчиками для увеличения диапазона измерения, повышения надежности и чувствительности.
[00145] Камера:
Оценка может также быть осуществлена посредством камеры, фотографирующей элемент, который имеет известный размер или который включает эталонную двумерную форму, имеющую известный размер (размеры), причем длина или размер изображения эталонной формы или элемента обеспечивают возможность выведения расстояния по меньшей мере между камерой и элементом. Известным элементом может быть: (i) кредитная карта или любая другая карта, содержащая расположенную на обратной стороне черную полосу, имеющую известные длину и/или ширину; (ii) монета или банкнота; (iii) предварительно калиброванные формы, такие как размер глаза, расстояние между глазами или любыми другими чертами лица субъекта.
[00146] Измерение выполняют с использованием устройств, состоящих из камеры и отображающего расстояние устройства, экрана и/или блока проецирования и вычислительного блока (процессора). Измерение может быть выполнено, используя одиночное устройство, которое состоит из блока камеры и/или блока измерения расстояния, отображающее устройство и/или проекционный блок и вычислительный блок (например, смартфон, планшетный персональный компьютер, компьютер с камерой, смартфон с встроенным проектором) или узел, состоящий из разделенных устройств, каждое из которых состоит по меньшей мере из одиночного уникального блока, которые соединены друг с другом локальной связью (например, кабелями, линиями связи WiFi, Bluetooth, инфракрасной связью или любым другим беспроводным соединением) и/или удаленным соединением (например, посредством сети Интернет).
[00147] Калибровку выполняют путем измерения отношения размера признака к известному размеру элемента/эталонной формы. Процедуру калибровки выполняют с камерой, расположенной на фиксированном расстоянии от признака объекта и от объекта калибровки. Плоскость объекта калибровки и плоскость признака элемента могут не совпадать. В таком случае смещение между плоскостями должно быть учтено в процессе определения расстояния.
[00148] В случае использования датчика камеры, формирующего данные двумерных изображений, должно быть задано или откалибровано отношение “efl/шаг” камеры, где "efl" - эффективное фокусное расстояние камеры, и "шаг" - эффективный шаг датчика. Эффективный шаг - физическое расстояние между соседними пикселями, умноженное на коэффициент понижающей дискретизации.
[00149] h - известная высота объекта Obj
[00150] h'- высота изображения известного объекта Obj
[00151] u - расстояние между линзой камеры и известным объектом Obj
[00152] ν - расстояние от линзы камеры до датчика
[00153] efl - эффективное фокусное расстояние камеры
[00154] h'_pixels_estimated - количество пикселей в установленной высоте известного объекта Obj
[00155] Из подобия треугольников: 
[00156] h'=шаг*h'_pixels_estimated
[00157] 
[00158] 
[00159] Несколько способов могут быть скомбинированы/использованы параллельно для повышения точности оценки u=ƒ(uh, uw). Процедура калибровки для отношения “efl/шаг” может быть выполнена с использованием известного размера объекта, изображенного камерой с известного расстояния.
[00160] Точность оценки расстояния:  ; h''=(h+Δh)*M. Где Δh - ошибка оценки длины в плоскости объекта;
; h''=(h+Δh)*M. Где Δh - ошибка оценки длины в плоскости объекта;  , где u' - оценка истинного значения "u":
, где u' - оценка истинного значения "u": 
[00161] u = mdba
[00162] 
[00163] 
[00164] Для стандартной линзы камеры с эффективным фокусным расстоянием efl=3 шагом датчика 1,4 мкм (смартфоны iPhone 5, Samsung Galaxy S3) и кредитной карты, заданной как известный объект Obj, количество ошибочных пикселей pixels_error, составляющее 45 пикселей, могут обеспечить точность 0,25 дптр.
[00165] Измерение рефракционной ошибки может включать измерение по меньшей мере одного из следующих параметров: эквивалентной преломляющей силы сферы (SEP) и/или астигматической преломляющей силы; и (iii) оси или угла астигматизма. Обследование может охватывать монокулярные и дополнительно также бинокулярные обследования.
[00166] Согласно некоторым вариантам реализации настоящего изобретения, целевые изображения, используемые для обследования рефракционной ошибки глаза, включая сферическую и цилиндрическую ошибки, могут изменяться в зависимости от конкретной исследуемой ошибки. Например, "однонаправленные" целевые изображения могут быть использованы для обследования и количественного определения астигматических ошибок. Испытания включают конкретные известные знаки, такие как буквы и цифры (оптотипы), выполненные известным шрифтом, имеющие известные размер, цвет, фон текстуры. Эти особенности позволяют определить преломляющую силу исследуемого глаза. Другие целевые изображения для исследования визуальной четкости, включая цилиндрическую ошибку, могут иметь "многомерные" или "всенаправленные" симметрии, такие как концентрические кольцевые формы, формы солнца или формы бабочки. В случае использования многомерных или всенаправленных целевых изображений максимальное расстояние наилучшей четкости может быть измерено при условии, что субъект наблюдал конкретный визуальный эффект на максимальном расстоянии от целевого изображения для определения преломляющей силы цилиндра в дальней точке, преломляющей силы цилиндра в ближней точке и угла/оси цилиндра для исследуемого глаза.
[00167] Целевое изображение:
Представление целевого изображения может включать представление изменяющихся характеристик, таких как размер, цвет, рисунок целевого изображения в течение длительного времени:
[00168] Размер мишени:
Размер одного или большего количества знаков целевого изображения (для краткости также называемые как "размер мишени") может быть вычислен согласно следующим параметрам/константам (LogMAR = логарифм для минимального угла разрешения):
[00169] "offset" = расстояние между исследуемым глазом и эталонной формой
[00170] "d0bjTarget" = расстояние между целевым изображением и эталонной формой
[00171] "d11" = расстояние между исследуемым глазом и целевым изображением
[00172] "d12" = d0bjTarget+offset [м]
[00173] "RefdistanceLogMAR" = 1,2[LogMAR]
[00174] "Refdistance" = 6,3 [м]
[00175] "RefTargetSize" = 8,7 [мм]
[00176] "RequireLogMar" = требуемая визуальная четкость
[00177] "fontConst" = фиксированный коэффициент размера шрифта
[00178] "distanceCalibrateToRequiredLogmar" = d12*10∧RequireLogMar
[00179] 
[00180] FontTargetSize = FontConst*TargetSize
[00181] Мишени с динамическим размером:
Мишень с размером, сохраняющим постоянный угол наблюдения вдоль всех осевых местоположений. Значение d12 постоянно обновляется процессором (например, оценивающим расстояние и калибрующим блоком) по мере изменения расстояния между глазом и мишенью. Следовательно, значение FontTargetSize (0095) следует за изменением расстояния от глаза до мишени и поддерживает постоянный угол наблюдения мишени для указанной необходимой визуальной четкости.
Мишени с фиксированным размером:
В этих случаях размер целевого изображения, представленного в определенном испытании "triali", регулируется до необходимой визуальной четкости на расстояниях, согласованных с максимальным расстоянием наилучшей четкости предыдущего испытания (triali-1) в серии испытаний. Значение d12, используемое в алгоритме, сохраняется постоянным в течение всей процедуры, и не связано с оперативным изменением расстояния от глаза до мишени. Например, если максимальное расстояние наилучшей четкости из предыдущего испытания составляло 33 см, результат вычисления с использованием d12=0,33 м будет применен для выведения размера мишени в течение этого испытания, несмотря на изменение расстояния в реальном времени между мишенью и глазом.
[00182] Знак в целевом изображении может иметь форму, например, букв, цифр, кольцевых форм, соединенных друг с другом или концентрически расположенных друг в друге в заданной очередности (например, множество концентрических колец с заданным пространством, разделяющим каждую пару соседних колец).
[00183] Одномерная мишень:
[00184] ƒ = пространственная частота
[00185] θ = угол желательной одномерной мишени
[00186] А = константа
[00187]
[00188] Пространственная частота одномерной мишени "f должна соответствовать необходимой визуальной четкости.
[00189] Значащая одномерная мишень:
Корпус значащей мишени составлен из одномерной мишени, такой как линии в определенной ориентации. Согласно одному варианту реализации, значащая мишень может быть буквами, такими как на мишенях 22а-22е, показанных на ФИГ. 4А-4Е. Согласно другому варианту реализации, значащая мишень может иметь известную простую или сложную форму, такую как контур животного. Назначение этой мишени состоит в предоставлении субъекту возможности выполнять значащую идентификацию деталей целевого изображения.
[00190] На более длинном расстоянии чем максимальное расстояние наилучшей четкости, если субъект воспринимает расплывчатое изображение, одномерная мишень преобразуется в бессистемное смешение цветов, составляющих одномерные пики (как показано на ФИГ. 4D). Фон гармонирует с данным расплывчатым средним цветом. В этом случае, расплывчатое изображение переходит почти в неразличимое изображение. Только при наблюдении на расстоянии ближе чем максимальное расстояние наилучшей четкости одномерная мишень становится различимой, следовательно, буквы или маска форм становятся заметными и значащими (как показано на ФИГ. 4С).
[00191] Угол желательной одномерной мишени соответствует углу астигматической ошибки субъекта.
[00192] Фоновый цвет показанного знака (знаков) в целевом изображении предпочтительно должен обеспечивать почти полную неразличимость дефокусированного изображения. Норматив для фоновой интенсивности составляет 0,67, где константа А, использованная в параграфе [00102], равна 1.
[00193] На ФИГ. 4F представлено целевое изображение 23, показывающее конкретный порядок оптотипов для проверки эквивалентной преломляющей силы сферы (SEP). На ФИГ. 4G показано черно-белое (BW) целевое изображение 24, состоящее из белых конических колец, расположенных поверх черного фона, для оценки цилиндрической ошибки (т.е., определения угла и преломляющей силы цилиндра).
[00194] Крестовые целевые изображения, такие как целевые изображения 25а и 25b на фиг. 4H-4I, показывают крест, составленный из двух или большего количества линий, проходящих под определенным углом "θ", каждая из которых имеет ширину w, причем линии смещены относительно друг друга на расстояние 2⋅w, и двух или большего количества линий, проходящих под углом θ+90°, каждая из которых имеет ширину w, и которые смещены относительно друг друга на расстояние 2⋅w. Крест может быть ориентирован под любым заданным углом.
[00195] Цвет мишени:
Цвет мишени или ее некоторых признаков (например, цвет фона ее знаков, уровень контрастности цветных полос в рельефе ее знака (знаков) и т.п.), и/или изменение цвета мишени во время обследования могут быть использованы для тонкой настройки максимального расстояния наилучшей четкости и/или облегчения определения местоположения любой цилиндрической аберрации (астигматизма) глаза и угла цилиндрической аберрации.
[00196] Целевое изображение виртуального хроматического кросс-цилиндра, такое как изображение 25b (на ФИГ. 4I):
Крестовидное целевое изображение, в котором линии, проходящие под углом θ, имеют зеленый цвет, и перпендикулярные им линии имеют красный цвет. Согласно некоторым вариантам реализации, это целевое изображение во время обследования может быть повернуто для измерения астигматизма на угол θ+90°.
[00197] В случае, когда черное изображение на белом фоне падает на сетчатку, красное изображение может наблюдаться позади сетчатки на расстоянии приблизительно 0,25 дптр. Соответствующее зеленое изображение приводит к осевому смещению изображения в область перед сетчаткой на расстоянии приблизительно 0,25 дптр. Этот хроматический способ может быть использован в соединении с виртуальным хроматическим кросс-цилиндром, который сдвигает одномерную мишень в область перед сетчаткой, а соответствующую ей перпендикулярную одномерную мишень - в область позади сетчатки. Описанный способ соответствует тому, что можно осуществить с использованием традиционного кросс-цилиндра. Преломляющая сила виртуального хроматического кросс-цилиндра может быть определена спектральной чувствительностью экрана. Увеличение длины волны возбуждения красного диапазона приведет к более высокой эффективной преломляющей силе виртуального хроматического кросс-цилиндра. Кроме того, более короткие длины волн, таких как синий или фиолетовый диапазоны волн, могут быть использованы в соединении с красным диапазоном волн для увеличения преломляющей силы до +-0,5 дптр, поскольку хроматическая аберрация для длины волны синего света (~ 480 нм) составляет -0,75 дптр и для красного света (~636 нм) +0,25 дптр. Однако, в этом случае следует рассматривать смещение, составляющее -0,25 дптр, к желтому диапазону волн как к среднему, и мишень должна быть представлена на расстоянии ближе на 0,25 дптр, чем предполагаемая эквивалентная сфера. Например, если максимальное расстояние наилучшей четкости оценено как 33,3 см, что соответствует сферической ошибке -3 дптр, то сине-красный виртуальный хроматический кросс-цилиндр должен быть установлен на расстоянии 0,308 м от глаза субъекта.
[00198] Хроматические значащие изображения 22b, 22с и 22е одномерной мишени (показанные на фиг. 4В, 4С, 4Е):
В этом способе цветом значащей одномерной мишени является красный цвет (как показано на ФИГ. 4С), и полосы рисунка проходят под определенным углом θ. Различимое изображение сравнивают с заданным зеленым или синим цветом на значащей одномерной мишени под тем же самым углом. Эти шаги повторяют под углом θ+90° (как показано на ФИГ. 4Е). В данном способе применен тот же самый принцип виртуального хроматического кросс-цилиндра, причем в данном способе для обеспечения возможности распознавания фигур или букв используется одномерная мишень.
[00199] В другом дополнительном способе используется значащее целевое изображение с комбинацией букв. Каждая буква может отличаться цветом, ориентацией, рисунком и/или текстурой.
[00200] На фиг. 4J-4L показано черно-белое (BW) целевое изображение 26а-26b с концентрическими кольцами:
На ФИГ. 4J изображение 26а показано как на экране, причем на ФИГ. 4К и 4L показано изображение 26b, иллюстрирующее, как изображение 26а воспринимается субъектом, страдающим астигматизмом.
[00201] На ФИГ. 5 показана блок-схема способа измерения рефракционной ошибки глаза субъекта согласно некоторым вариантам реализации настоящего изобретения. Способ включает инициализацию 41 сеанса обследования (также для краткости названного "сеансом"), например, посредством графического пользовательского интерфейса предназначенного для этой цели приложения, работающего на персональным устройстве субъекта. После инициирования сеанса обследования на этапе 42 показывают в области отображения (например на экране персонального устройства) целевое изображение, имеющее предварительно выбранные графические характеристики. Субъекту/пользователю предоставлена возможность выбрать тип рефракционной ошибки, которую он или она желает проверить в каждой точке, или приложение может быть сконфигурировано для проверки всех типов рефракционных ошибок в заданной очередности путем отображения соответственно выбранных целевых изображений.
[00202] Затем субъекту, который в данный момент не пользуется средством для рефракционной коррекции, посредством пользовательского интерфейса приложения на этапе 43 предлагают определить расстояние, которое, по его мнению, является максимальным расстоянием наилучшей четкости, до представленного изображения, и на этапе 44 указать момент достижения этого положения максимального расстояния наилучшей четкости путем использования варианта (вариантов) обратной связи приложения и его пользовательского интерфейса. Субъект может найти положение максимального расстояния наилучшей четкости путем собственного физического отдаления от области отображения или перемещением непосредственно области отображения. Инструкции могут передаваться, например, в форме текстовых и/или звуковых сообщений посредством экрана и/или громкоговорителя персонального устройства соответственно.
[00203] Приложение может управлять датчиком системного/персонального устройства таким образом, что данные будут получаться непрерывно, или периодически, или только после ввода субъекта/пользователя, подтверждающего передачу данных после достижения максимального расстояния наилучшей четкости. В любом случае, приложение идентифицирует или синхронизирует момент времени, в который оно принимает свидетельство от субъекта о том, что он достиг местоположения максимального расстояния наилучшей четкости, и в это момент фиксирует данные, полученные от датчика. Полученные данные датчика на этапе 45 принимают в процессорную систему, и также дополнительно могут сохранять в предназначенном для этой цели запоминающем устройстве.
[00204] Затем принятые захваченные данные (например, изображение исследуемого глаза или другой эталонной формы) могут быть обработаны на этапе 46 для оценки таким образом (выведения из их) фактического расстояния "D" между исследуемым глазом и целевым изображением в момент достижения максимального расстояния наилучшей четкости.
[00205] Согласно некоторым вариантам реализации, как указано выше, в случае использования датчика, который обеспечивает двумерные изображения, и при использовании эталонной формы известных размеров, значение одного или большего количества размеров (например, ширины и/или длины) изображения эталонной формы сравнивают с ее абсолютным соответствующим размером (размерами) для выведения расстояния "D1" между датчиком и положением эталонной формы, и затем, расстояние "D" между исследуемым глазом и целевым изображением выводится из расстояния "D1" с использованием реального (абсолютного) расстояния между областью отображения и датчиком и расстояния между эталонной формой и известным исследуемым глазом.
[00206] Затем предполагаемое расстояние "D" между исследуемым глазом и целевым изображением и известные характеристики целевого изображения используют на этапе 47 для вычисления значения одного или большего количества параметров, ассоциированных с рефракционной ошибкой глаза, такой как преломляющая сила "Р", как указано выше. Затем, результирующее значение (значения) могут быть представлены на этапе 48 субъекту, например, путем их показа в области отображения и/или воспроизведения в форме звукового сообщения.
[00207] Согласно некоторым вариантам реализации, обследование может дополнительно включать этап 49 предварительной калибровки в случаях, в которых датчик должен быть откалиброван относительно конкретных размеров эталонной формы, которые не известны системе. Например, в случаях, в которых известную временную эталонную форму (такую как магнитная полоса кредитной карты) используют только для калибровки размера исследуемого глаза субъекта, данную временную эталонную форму также используют в качестве эталонной формы во время сессии натурных измерений.
[00208] На ФИГ. 6 показана блок-схема процесса предварительной калибровки для измерения размеров эталонной формы путем использования временной эталонной формы согласно некоторым вариантам реализации настоящего изобретения, в которых в качестве датчика используется камера, выполненная с возможностью формирования данных двумерных изображений. Приложение может быть выполнено с возможностью передачи на этапе 51 инструкций для субъекта, в которых ему предлагают удерживать известный временный элемент эталонной формы, такой как кредитная карта, в конкретном положении (например, закрывать неисследуемый глаз с магнитной полосой, обращенной наружу). После определения на этапе 52 правильного расположения временного элемента эталонной формы, о чем субъект может указать посредством специальной платформы для ввода, входящей в состав пользовательского интерфейса, или простым управлением камерой посредством пользовательского интерфейса для получения изображения на этапе 53, полученное изображение должно включать и весь элемент эталонной формы и исследуемый глаз. Затем, полученные графические данные обрабатывают на этапе 54 путем выполнения процесса обследования изображения, соответствующего этим данным, который может включать, например: (i) идентификацию размера (размеров) временной эталонной формы (например, ширины и/или длины, и/или угловой ориентации магнитной полосы) с выработкой одного или большего количества шкал отношений, таких как шкалы ширины и/или длины; (ii) идентификацию контуров фиксированной эталонной формы (например, идентификацию контуров исследуемого глаза); и (iii) измерение одного или большего количества абсолютных значений одного или более параметров фиксированной эталонной формы (таких как абсолютная длина глаза). Затем, абсолютное значение (значения) соответствующего параметра (параметров) на этапе 55 может быть сохранено в системном запоминающем устройстве для использования при измерении расстояния.
[00209] На ФИГ. 7 показана блок-схема способа периодической идентификации эталонной форма магнитной полосы кредитной карты, удерживаемой субъектом таким образом, что карта закрывает его неисследуемый глаз, путем обнаружения ее двумерных изображений с целью измерения расстояния согласно некоторым вариантам реализации настоящего изобретения. При инициировании на этапе 61 обследования один из блоков приложения принимает на этапе 62 входные данные, содержащие двумерное изображение захватываемого в данный момент времени кадра, размеры элемента всей кредитной карты (СС), и на этапе 63 использует входные данные для параллельного выполнения двух процессов идентификации вертикальных и горизонтальных соотношений изображения СС. Для идентификации длины изображения магнитной полосы (в количестве пикселей) алгоритм на этапе 64а/64b находит ее края, и на этапах 65a-66a/65b-66b идентифицирует размер продольных и горизонтальных линий ("n" и "р"), которые простираются от одного края магнитной полосы к другому, в пикселях с использованием преобразования Хафа, и на этапах 67а, 67b, 68-69 согласует перпендикулярные линии "n"-"р" согласно близости, размеру, уровню перпендикулярности и т.п.. Затем, на этапах 70-71 n-p-пары используют для оценки вертикальных и горизонтальных размеров изображения магнитной полосы, например, путем усреднения всех длин пар "n" и "р" (по отдельности).
[00210] Системы и способы согласно некоторым вариантам реализации настоящего изобретения могут быть сконфигурированы с возможностью выполнения сначала обследования на близорукость/дальнозоркость/пресбиопию путем использования первого набора целевых изображений и, затем, выполнения испытания на измерение астигматизма путем измерения угла цилиндра с последующим измерением преломляющей силы цилиндра.
[00211] Угол цилиндра, если таковой существует, может быть оценен путем обращения субъекта к точно определенному диапазону расстояний, выведенных из сферического максимального расстояния наилучшей четкости (максимального расстояния наилучшей четкости до мишени без значительных предпочтений направленности). Субъекту предлагают начать просмотр концентрической симметричной мишени, такой как двойное окрашенное изображение (один цвет для кольца и один цвет для фона, такое как черно-белое (BW) изображение концентрических колец (показанное на ФИГ. 4J) на максимальном расстоянии наилучшей четкости, на котором все концентрические кольца кажутся одинаково четкими. Затем посредством пользовательского интерфейса субъекту предлагают расположить изображение песочных часов (также называемое клепсидрой или бабочкой), если таковое имеется, дальше, чем максимальное расстояние наилучшей четкости, но не дальше, чем удвоенное максимальное расстояние наилучшей четкости (2*MDBA). Этот строго заданный диапазон расстояний гарантирует идентификацию цилиндра преломляющей силы цилиндра до половины эквивалентной преломляющей силы сферы. Прием субъективной обратной связи об асимметричном восприятии (как показано на ФИГ. 4K) симметричной мишени (как показанная на ФИГ. 4J) (такой как круг или концентрические кольца, такие как показанные на фиг. 4G и 4J-4L) и угла (как показано на ФИГ. 4L), при котором происходит асимметричное восприятие, позволяет вычислить преломляющую силу и ось астигматизма. Из местоположения, в котором песочные часы в основном являются очевидными, и в котором под определенным углом одни песочные часы видны с четкими высококонтрастными дугами, и другие перпендикулярные песочные часы видны с расплывчатыми более широкими дугами, может быть оценена ось, а также преломляющая сила цилиндра. Субъекту предлагают расположить черту, такую как черта 41 на ФИГ. 4L, в середине четко различимых песочных часов для определения угла "θ" между горизонтальной осью "х" изображения и чертой 41 для вычисления угла астигматизма. Расстояние до глазной мишени, на котором наблюдаются четко различимые песочные часы, соответствует преломляющей силе слабой оси цилиндрической ошибки. Проверку на астигматическую преломляющую силу может облегчить одномерная мишень под найденным углом. В том же самом строго заданном диапазоне расстояний советуют избегать контрастного реверсирования периодической мишени.
[00212] Согласно некоторым вариантам реализации, астигматический угол определяется при использовании одного или большего количества следующих способов:
[00213] Ахроматический способ: Согласно данному способу, субъект должен смотреть на целевое черно-белое изображение, подробно указывая ориентацию астигматизма (например, на концентрические равноотстоящие кольца). Субъекту предлагают рассматривать мишень на расстоянии, немного превышающем максимальное расстояние наилучшей четкости. Субъект указывает ориентацию посредством субъективного ответа (обратной связи) с использованием средства для ввода в устройстве/системе. В случае концентрических кругов субъект указывает ориентацию более высокой контрастной области.
[00214] Хроматический способ: Согласно этому способу, субъект должен смотреть на хроматическую мишень, подробно указывая ориентацию астигматизма, например, на виртуальный хроматический кросс-цилиндр. Субъекту предлагают рассматривать мишень на конкретном расстоянии и/или в конкретном диапазоне расстояний. Различие/контраст хроматичности облегчает определение местоположения оси астигматизма.
[00215] Определение астигматической преломляющей силы:
Мишени, используемые для измерений астигматизма этого типа, являются одномерными мишенями в астигматическом меридиане. Эти мишени облегчают оценку максимального расстояния наилучшей четкости для данной астигматической преломляющей силы. Изображение концентрических колец (как показано на ФИГ. 4Н) также может быть использовано до тех пор, пока наиболее различимое изображение песочных часов не будет сформировано высококонтрастными и низкоконтрастными областями концентрических колец. Астигматическую мишень перемещают назад и вперед до точки самой большой четкости, о чем указывает субъект, и расстояние до этой точки считают фактическим расстоянием "D" максимального расстояния наилучшей четкости.
[00216] Субъекту предлагают рассматривать мишень на расстоянии, превышающем сферическое эквивалентное максимальное расстояние наилучшей четкости. Для определенной максимальной астигматической ошибки расстояние мишени должно быть в диапазоне: 
[00217] Например: для эквивалентной преломляющей силы сферы -2,50 дптр максимальное расстояние наилучшей четкости составляет 400 мм; для максимальной астигматической ошибки (ASTG_error) -3,00 дптр диапазон для представленной мишени должен составлять от 0,4 м до 1 м.
[00218] Для тонкой настройки могут быть использованы различные хроматические мишени. Элемент эталонной формы, используемый для измерения расстояния (например, кредитная карта), может быть использован в качестве средства заграждения во время обследования незакрытого глаза.
[00219] Для испытания преломляющей силы с меньшими значениями:
При эквивалентной преломляющей силе сферы <1,50 дптр испытание выполняют с использованием вспомогательного средства, такого как зеркало. В этом способе экран должен находиться перед зеркалом и задней камерой, расположенной перед субъектом. Расстояние до изображения, наблюдаемого субъектом, в данном случае равно сумме расстояния между субъектом и задней камерой и удвоенного расстояния между экраном и зеркалом. Таким образом, субъект также может удерживать смартфон на приемлемом расстоянии (~65 см), и в то же время рассматривать мишени на расстояниях до 6 м. В этом способе задняя камера может быть использована для оценки расстояния от глаза до задней камеры, в то время как передняя камера может быть использована для оценки расстояния от передней камеры до зеркала. В последнем примере форма, заложенная ранее в смартфон, может быть использована в качестве объекта известного размера для выведения расстояния.
[00220] На ФИГ. 8A-8D показано целевое изображение 27а для измерения оси астигматизма с использованием хроматического способа: на ФИГ. 8А показано целевое изображение 27а для измерений астигматизма, состоящее из цветных полос на черном фоне, включая три вертикальные параллельные линии, причем средняя линия является зеленой, и две наружные линии являются красными, при этом линии разделены известным разделяющим расстоянием; на ФИГ. 8В представлено изображение 27b, показывающее, как целевое изображение 27а будет воспринято субъектом, имеющим угол астигматизма 0°; на ФИГ. 8С представлено изображение 27 с, показывающее, как целевое изображение 27а (на ФИГ. 8А) будет воспринято субъектом, имеющим угол астигматизма 45°; и на ФИГ. 8D представлено изображение 27d, показывающее, как мишень, показанная на ФИГ. 8А, будет воспринята субъектом, имеющим астигматизм, который совместно выровнен с направлением представленных окрашенных полос.
[00221] Когда субъект, имеющий рефракционную ошибку астигматизма, рассматривает целевое изображение 27а, показанное на ФИГ. 8А, он может наблюдать определенное смешивание цветов. Например, в областях, где расплывчатый зеленый цвет перекрывается с расплывчатым красным цветом, возникает желтая линия. Это показано на ФИГ. 8D, на котором минимальное смешивание цветов (генерация желтого цвета) происходит, когда астигматическая ось совместно выровнена с направлением полосы. Это испытание помогает распознать, когда эти две оси являются совместно выровненными.
[00222] На ФИГ. 9А-9С показано другое целевое изображение 28а, предназначенное для измерения оси астигматизма хроматическим способом: на ФИГ. 9А показано целевое изображение 28а, содержащее множество цветных полос для измерений астигматизма, включающие четыре набора полос, причем каждый набор содержит три параллельные полосы - красную, зеленую и красную, разделенные одинаковым разделительным расстоянием, при этом наборы полос пересекают друг друга под углом таким образом, что угол между каждой соседней парой наборов-полос по существу является одним и тем же; на ФИГ. 9В представлено изображение 28b, показывающее, как целевое изображение, показанное на ФИГ. 9А, будет воспринято субъектом, имеющим астигматизм с углом, близким к углу α1=0°; и на ФИГ. 9С представлено изображение 28с, показывающее, как воспринимается изменение в целевом изображении 28а, показанном на ФИГ. 9А, согласно обратной связи субъекта, указывающего, что он воспринимает набор наиболее четко различимых полос, который показан на ФИГ. 9В.
[00223] Согласно некоторым вариантам реализации, для точного измерения угла астигматизма субъекта первая мишень, представленная субъекту, является цветным симметричным изображением, показанным на максимальном расстоянии наилучшей четкости, таким как целевое изображение, показанное на ФИГ. 9А. После показа изображения, представленного на ФИГ. 9А, на максимальном расстоянии наилучшей четкости субъекту предлагают поместить мишень в положение, в котором один или большее количество наборов полос являются более четко различимыми, чем другие, и затем предлагают в качестве обратной связи указать, какие из данных четырех наборов полос наблюдаются как наиболее четко различимые. Согласно данному варианту реализации, на ФИГ. 9В показана ситуация, в которой конкретные субъекты видят вертикальный набор полос как наиболее четко различимый. Затем субъект посредством обратной связи инициирует процесс уточнения, в котором, например, другие неперпендикулярные наборы полос перемещаются в угловом направлении для уменьшения угла между ними и выбранным наиболее четко различимым набором полос, как показано на ФИГ. 9С. Если два набора были идентифицированы как одинаково четко различимые, мишень необходимо вращать для расположения основного креста в середине идентифицированных двух наборов. Субъекта просят посредством обратной связи указать, какой из наборов полос является наиболее четко различимым, для уточнения углового астигматизма. Этот процесс приближения соседних наборов полос к выбранному наиболее четко различимому набору может быть повторен, пока выбранный набор полос не станет таким же, как выбранный ранее. Согласно другому варианту реализации, процесс уточнения угла может быть осуществлен как изменение угла всей мишени посредством пользовательского интерфейса и/или связанных с ним датчиков (т.е., посредством камеры, идентифицирующей наклон относительно кредитной карты, датчика гироскопа смартфона и т.п.) для определения угла, при котором один из наборов является наиболее четко различимым, в то время как перпендикулярный набор является наименее четким.
[00224] На ФИГ. 10 показана блок-схема хроматического способа измерения угла цилиндра согласно некоторым вариантам реализации настоящего изобретения. Этот способ включает этап 81, согласно которому принимают максимальное расстояние наилучшей четкости, связанное с предварительно измеренным максимальным расстоянием наилучшей четкости с использованием мишени без предпочтения направленности, а также этап 82, согласно которому предлагают субъекту расположить целевое изображение (путем размещения области отображения) или расположиться самому на максимальном расстоянии наилучшей четкости. После достижения субъектом максимального расстояния наилучшей четкости ненаправленной мишени, ему на этапе 83 с использованием отображающего средства показывают другое целевое изображение, представляющее хроматическую мишень, такую как, например, мишень, состоящую из полос, показанную на ФИГ. 9А, и на этапе 84 перемещают данную мишень, или субъект перемещается относительно мишени, для достижения нового расстояния "D" между мишенью и исследуемым глазом субъекта в пределах диапазона от максимального расстояния наилучшей четкости до удвоенного максимального расстояния наилучшей четкости (MDBA<d<2xMDBA). Затем на этапе 85 субъекту предлагают найти расстояние, на котором он распознает один или большее количество наборов полос в мишени, которые являются более четко различимыми, чем другие, с минимальным смешиванием цветов, и на этапе 8ба фиксируют расстояние в этом местоположении, если такое распознавание имеет место в пределах указанного диапазона. Затем система на этапе 87а автоматически измеряет расстояние "D" в этом местоположении и задает это расстояние в качестве нового максимального расстояния наилучшей четкости для более слабой оси. На этапе 88а посредством обратной связи субъект указывает угол наиболее четко различимой полосы, который принимают от него, и если на этапе 89а определено, что уточнение этого угла не требуется, на этапе 91 сохраняют данный угол цилиндра и максимальное расстояние наилучшей четкости для слабой оси. Если на этапе 89а определено, что требуется уточнение этого угла, на этапе 90 целевое изображение вращают с использованием приложения и повторяют этапы 88а-91.
[00225] Согласно другому варианту реализации, изменение угла всей мишени осуществляют путем изменения угла самого устройства с использованием датчика гироскопа устройства, регистрирующего это изменение. Такой подход может быть применен для уточнения угла, например, с использованием мишени, показанной на ФИГ. 9А.
[00226] В случае, если на этапе 85 не определено распознавание четкого изображения с минимальным смешиванием цветов в пределах диапазона MDBA<D<2xMDBA, в качестве расстояния "D" на этапе 86b принимают расстояние, на котором изображение мишени является наиболее четко различимым, и на этапе 87b расстояние "D" измеряют системой и задают в качестве максимального расстояния наилучшей четкости после его подтверждения на этапе 88b, затем на этапе 89b идентифицируют состояние "Астигматизм отсутствует".
[00227] На ФИГ. 11 показана блок-схема ахроматического способа измерения угла цилиндра с использованием концентрической симметричной мишени согласно некоторым вариантам реализации настоящего изобретения. Согласно данному способу, на этапе 131 принимают максимальное расстояние наилучшей четкости, относящееся к предварительно измеренному максимальному расстоянию наилучшей четкости, полученному с использованием мишени без предпочтений направленности, после чего на этапе 132 субъекту предлагают расположить целевое изображение (путем размещения области отображения) или предлагают расположиться самому относительно мишени на максимальном расстоянии наилучшей четкости. После достижения субъектом максимального расстояния наилучшей четкости от ненаправленной мишени, на этапе 133 ему показывают другое целевое изображение на отображающем средстве, представляющее собой концентрическое симметричное изображение 26а, например, такое, как изображение концентрических колец, показанное на ФИГ. 4J, и на этапе 134 перемещают мишень, или перемещается сам субъект, для достижения нового расстояния "D" между мишенью и исследуемым глазом субъекта в пределах диапазона MDBA<D<2xMDBA, на котором мишень воспринимается как песочные часы. При распознавании субъектом на этапе 136 изображения песочных часов, ему предлагают на этапе 138а найти в пределах указанного диапазона расстояние "D", на котором изображение песочных часов является наиболее четко различимым, и на этапе 139а это расстояние измеряется и устанавливается как максимальное расстояние наилучшей четкости для слабой оси. Затем субъект в качестве обратной связи на этапе 140 может ввести угол наиболее четко различимого вида песочных часов, после чего на этапе 143 сохраняют угол цилиндра для сильной оси и максимальное расстояние наилучшей четкости для слабой оси.
[00228] На ФИГ. 12 показана блок-схема способа оценки преломляющей силы цилиндра с использованием мишени, содержащей одномерные признаки, согласно некоторым вариантам реализации настоящего изобретения. В этом процессе на этапе 151 угол оси цилиндра принимают из предыдущих измерений (например, из процесса, описанного на ФИГ. 10 или на ФИГ. 11). Затем, на этапе 152 субъекту предлагают расположить область отображения (например, экран) или расположиться самому таким образом, чтобы расстояние между ним и областью отображения составляло среднее значение максимального расстояния наилучшей четкости осей. После достижения этого расстояния целевое изображение с одномерными признаками на этапе 153 показывают под углом цилиндра, и на этапе 154 субъекту предлагают увеличить расстояние между его исследуемым глазом и мишенью до самого дальнего местоположения (путем собственного перемещении или перемещения области отображения) в пределах диапазона MDBA<D<2xMDBA, на котором целевое изображение все еще является распознаваемым. На этапе 155 это расстояние измеряют и задают как максимальное расстояние наилучшей четкости соответствующей оси, и на этапе 156 эти параметры сохраняют. Для повышения точности процесс оценки преломляющей силы цилиндра может быть повторен при ориентации 90° относительно предыдущего измерения для определения преломляющей силы для сильной оси. На этапе 157 получают конечные результаты, которые, таким образом, обеспечивают возможность использования этих значений для изготовления очков или контактных линз. Например, указанные параметры включают следующие подробности: (i) Преломляющая сила = преломляющая сила для слабой оси; (ii) Цилиндр = разность (вычитание) между преломляющей силой для сильной оси и преломляющей силой для слабой оси; и (iii) угол = угол сильной оси.
[00229] Для проверки того, что измеренное максимальное расстояние наилучшей четкости не является слишком коротким или слишком длинным, могут быть применены несколько способов. В способе, названном в настоящей заявке как "расплывчатый задник", субъект перемещает экран назад от максимального расстояния наилучшей четкости на расстояние, эквивалентное расплывчатости в одну диоптрию. Например, при измеренном максимальном расстоянии наилучшей четкости, составляющем 33 см, что соответствует преломляющей силе 3 дптр, субъекту предлагают переместить экран назад к расстоянию 50 см, соответствующему преломляющей силе 2 дптр. Ожидаемая расплывчатость в 1 дптр должна привести к уменьшению визуальной четкости на 0,2-0,3 единиц [logmar].
[00230] Другим способом проверки максимального расстояния наилучшей четкости является хроматический способ, согласно которому цвет мишени переключают к цвету, соответствующему укороченной длине волны, при одновременном поддерживании того же самого максимального расстояния наилучшей четкости. Хроматическая аберрация глаза в данном случае привела бы к миопическому сдвигу, таким образом предотвращающему чрезмерный отрицательный результат. Четко различимое цветное изображение, соответствующее укороченной длине волны, указывает на слишком короткое результирующее максимальное расстояние наилучшей четкости. Использование цвета, соответствующего увеличенной длине волны, может подтвердить согласно тому же самому принципу, что максимальное расстояние наилучшей четкости не является слишком большим и, таким образом, предотвращает чрезмерный положительный результат. Все способы проверки могут быть применены ко всем параметрам, измеряемым на любом этапе настоящего обследования.
[00231] На ФИГ. 13А показано черно-белое целевое изображение 30, состоящее из букв, для измерения визуальной четкости (VA) путем измерения грубо оцененной эквивалентной преломляющей силы сферы (SEP) глаз субъектов согласно некоторым вариантам реализации настоящего изобретения. Основное целевое изображение 30 составлено из множества букв (например, пропорций букв оптотипа Снеллена) с определенным зазором между соседними буквами.
[00232] Испытание эквивалентной преломляющей силы сферы выполняют, когда целевое изображение 30 размещено в фиксированном положении, таком как на расстоянии 1 м (или больше) от субъекта. Близорукие субъекты будут видеть мишень с определенной степенью дефокусировки. Размер целевого изображения 30 изменяют до тех пор, пока его размер не перестанет коррелировать с минимальным углом четкости разрешения (MAR). Каждая буква обычно составлена из 5 элементов MAR и частично распознается, когда расплывчатость дефокусировки приблизительно равна размеру буквы. Субъект должен видеть размытую мишень на расстоянии, превышающем его максимальное расстояние наилучшей четкости (например, 2 м -> наилучшее фокусное расстояние только для близорукости -0,5 дптр, на котором человек, страдающий сильной близорукостью, будет видеть ее расплывчатой), не стимулируя, таким образом, аккомодацию.
[00233] Исходный размер букв в целевом изображении 30 мишени (или любой другой оптометрической формы, например, такой как кольца Ландольта, символа Е и т.п.) составляет 6/6 (каждая буква стягивает угол, составляющий 5 угловых минут). Мишень увеличивают, пока субъект не распознает примерно 50% букв. Согласно некоторым вариантам реализации, приблизительное максимальное расстояние наилучшей четкости связано с размером буквы, выбранной согласно таблице, показанной на ФИГ. 13В.
[00234] Согласно другому варианту реализации, вместо показа одиночной строки субъекту показывают на экране одновременно множество строк оптотипов увеличивающегося размера, которые увеличивают, пока субъект не сможет распознать 50% букв, как описано выше в отношении целевого изображения 30, показанного на ФИГ. 13А. Затем субъекта просят прочитать читаемую линию с самым маленьким размером оптотипов.
[00235] Данное изображение 30 также может быть использовано для грубой оценки эквивалентной преломляющей силы сферы субъекта для отсеивания субъектов, имеющих эквивалентную преломляющую силу сферы диоптрии, которая превышает заданное значение. Если эквивалентная преломляющая сила сферы слишком высока (например, больше чем 9 дптр) из-за близорукости, автоматизированное обследование не в состоянии обеспечить достаточно точное измерение эквивалентной преломляющей силы сферы, и субъекту может быть отказано в этой услуге данной системы. Если эквивалентная преломляющая сила сферы находится в пределах разрешенного диапазона диоптрий, данное приложение может предоставить субъекту возможность продолжать обследование.
[00236] На фиг. 14А и 14В показано целевое изображение 31а, состоящее из двух наборов тех же самых букв, один из которых нанесен поверх синего фона, и другой нанесен поверх красного фона, для измерения эквивалентной преломляющей силы сферы глаз субъектов согласно некоторым вариантам реализации настоящего изобретения. На ФИГ. 14А представлено целевое изображение 31а в том виде, как оно показано на экране, для испытания эквивалентной преломляющей силы сферы; и на ФИГ. 14В представлено изображение 31b, показывающее, как целевое изображение 31а будет воспринято на максимальном расстоянии наилучшей четкости, когда только буквы на синем фоне будут расплывчатыми, а буквы на красном фоне хорошо читаемы. Это испытание и целевое изображение 31а предназначены для предоставления субъекту возможности облегченного определения положения максимального расстояния наилучшей четкости с повышенной точностью.
[00237] Целевое изображение 31а составлено из двух смежных прямоугольных полей красного и синего (или зеленого) цвета. На каждом поле нанесены буквы (например, в пропорциях букв оптотипа Снеллена) с определенным зазором между буквами. Это испытание может быть выполнено только для тех субъектов, которые не страдают дальтонизмом. Исходный размер букв (или любой другой оптометрической формы, такой как кольца Ландольта, символы Е и т.п.) целевого изображения 31а составляет 6/6 (каждая буква противолежит углу, составляющему 5 угловых минут). Испытание на измерение эквивалентной преломляющей силы сферы основано на хроматической дисперсии оптики глаза, причем красная мишень видна в фокусе дальше чем синяя (зеленая). По этой причине субъект все еще может читать буквы на красном фоне, когда буквы на синем фоне становятся полностью расплывчатыми и нечитабельными. Синий фон может быть заменен зеленым фоном.
[00238] На этом этапе обнаружения эквивалентной преломляющей силы сферы субъекту предлагают удерживать отображающее устройство (с целевым изображением 31а) таким образом, что буквы на красном и на синем или зеленом полях являются расплывчатыми и нечитабельными. Затем субъекту предлагают перемещать в направлении к себе отображающее устройство (с одновременным регулированием размера мишени для непрерывного или ступенчатого поддерживания того же самого угла) до тех пор, пока субъект не сможет прочитать все буквы на красном поле (черные буквы с красным фоном), в то время как на синем поле (или зеленом) субъект не может прочитать все буквы (условие остановки). Таким образом, субъект не испытывает желания приложить усилия для аккомодации, и останавливает перемещение сразу, как только красные буквы становятся читаемыми на максимальном расстоянии наилучшей четкости. Затем измеряют результирующее расстояние от изображения, захваченного камерой системы, и выполняют исследование изображения, как описано выше, в котором максимальное расстояние наилучшей четкости (MDBA) преобразуют в эквивалентную преломляющую силу сферы с помощью уравнения:
[00239] 
[00240] Если субъект не может найти расстояние, на котором он видит буквы размером 6/6, он может попросить увеличивать размер букв до 6/9 посредством пользовательского интерфейса данного приложения (при этом каждая буква противолежит углу, составляющему 7,5 угловых минут), и процедура повторяется.
[00241] На ФИГ. 15А и 15В показано полосчатое целевое изображение 32а в форме бабочки, содержащее зеленые дугообразные полосы на черном фоне, причем одна из дугообразных полос с каждой стороны окрашена в красный цвет, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 15А показано целевое изображение 32а в форме бабочки, как оно выглядит на экране, для измерения максимального расстояния наилучшей четкости; и на ФИГ. 15В показано целевое изображение 32b в форме бабочки, как оно выглядит после прохождения максимального расстояния наилучшей четкости, причем дугообразные красные полосы кажутся превращающимися в желтоватые.
[00242] Целевое изображение 32а выполнено из двух секторов концентрического кольца. Угол каждого сектора может составлять 5°-45°. Большая часть дугообразных полос являются зелеными, в то время как одна или большее количество полос являются красными. Выбор двух цветов в данном примере сделан таким образом, что обеспечивается смешивание цветов с помощью расплывчатости, в результате чего формируется различимый цвет (красный в данном случае). Кроме того, из-за хроматической аберрации глаза, когда расстояние между субъектом и целевым изображением достигает расстояния минимального смешивания (с приближением от дальнего расстояния к ближнему), красная полоса первой достигает точки своей самой четкой различимости. Зеленые полосы все еще остаются дефокусированными и смешиваются с красными, вызывая переход красного цвета в желтый. На более близком расстоянии красные полосы являются дефокусированными и вносят свой вклад в изменение окраски зеленых дуг. Точка остановки перемещения задана как точка, в которой желтый цвет исчезает, и красный цвет появляется (32с), причем в этом положении зеленые дуги все еще являются дефокусированными, таким образом, субъект еще не прилагает усилия для аккомодации. Таким образом, это расстояние является максимальным расстоянием наилучшей четкости для ближнего цилиндра. Ориентация целевого изображения 32а может быть изменена на перпендикулярную астигматическому углу, найденному в предыдущих испытаниях на астигматизм.
[00243] В некоторых выполненных испытаниях половина ширины функции рассеяния точки в фокусе составляет примерно две угловые минуты. Т.е., также едва различимый значимый размер расплывчатости составляет 0,15-0,2 дптр. Поскольку значимая хроматическая дисперсия составляет примерно 0,25 дптр, допущение, что размер дугообразных красных и зеленых полос является примерно одинаковым, т.е., составляет 2-4 угловые минуты, обеспечивает достаточное цветовое смешивание.
[00244] Согласно некоторым вариантам реализации, при использовании целевых изображений с изображением в форме бабочки, таких как изображение 32а, субъекту может быть предложено посредством инструментов прикладного программного обеспечения и аппаратных средств перемещать в направлении от себя отображающее устройство или отодвигаться самому от отображающего устройства до тех пор, пока красное кольцо (в данном примере) не станет желтоватым, и, затем начать приближать отображающее устройство, пока указанное кольцо не начинает выглядеть красным как прежде. Расстояние на этом этапе автоматически измеряют и принимают как максимальное расстояние наилучшей четкости (предполагаемое расстояние по наибольшей астигматической преломляющей силе ("ближнего цилиндра")).
[00245] На ФИГ. 16А и 16В показано прямое целевое изображение с тремя полосами, включающими зеленые боковые полосы и среднюю красную полосу на черном фоне, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 16А представлено целевое изображение 33а в том виде, как оно показано на экране для измерения астигматизма; и на ФИГ. 16В показано целевое изображение 33b в том виде, как его воспринимает субъект, имеющий астигматизм 180°.
[00246] На ФИГ. 17А и 17В показано другое прямое целевое изображение с тремя полосами 34а, включая зеленые боковые полосы и среднюю красную полосу на черном фоне, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 17А показано целевое изображение 34а в том виде, как оно показано на экране для измерения астигматизма; и на ФИГ. 17В показано целевое изображение 34b в том виде, как его видит субъект, имеющий астигматизм 180°.
[00247] На ФИГ. 18А и 18В показано цветное целевое изображение 35а "солнца", содержащее множество комбинированных полосчатых целевых изображений, причем каждая полоса целевого изображения "солнца" содержит зеленые боковые полосы и среднюю красную полосу на черном фоне, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 18А показано целевое изображение 35а "солнца" в том виде, как оно показано на экране для измерения астигматизма; и на ФИГ. 18В показано целевое изображение 35b "солнца" в том виде, как его видит субъект, имеющий астигматизм 180°. Полосчатое целевое изображение 33а, показанное на ФИГ. 16А, используют для создания подобной солнцу формы целевого изображения 35а, показанного на ФИГ. 18А. Основной структурный элемент мишени, как показано на ФИГ. 16А, состоит из пары зеленых боковых полос и одиночной красной полосы в середине на черном фоне, образующем черные зазоры между боковыми зелеными и красной полосами. При рассматривании данного изображения с астигматической рефракционной ошибкой может иметь место определенное цветовое смешивание, такое как показанное на ФИГ. 17В, для астигматизма 180°. Смешивание зависит от свойств структурных элементов изображения. Как показано на ФИГ. 16А и 17А, формы выполнены из трех зелено-красно-зеленых полос. В других подобных целевых изображениях "солнца" зелено-красно-зеленые полосы имеют несколько увеличенный зазор между полосами. На ФИГ. 17В формы 0° претерпевают астигматическую расплывчатость 90, причем в середине возникла зеленоватая полоса.
[00248] Когда формы совпадают с осью астигматической расплывчатости, смешивание не возникает (как показано на ФИГ. 16В). Субъект очень легко может отличить, что является осью астигматизма, одновременно сформированного множеством структурных элементов в различных ориентациях, таких как показанные на солнцевидном целевом изображении 35а. Из-за хроматической аберрации глаза, когда мишень приближается к расстоянию минимального смешивания (с приближением от дальнего расстояния к ближнему), красная полоса достигает своей наиболее четко различимой первой точки. Каждая зеленая полоса все еще остается дефокусированной и смешивается с красной полосой в ее местоположении, изменяя ее цвет на желтый. На более близком расстоянии красная полоса дефокусирована и способствует изменению цвета зеленых полос. Точка остановки определяется по исчезновению желтого цвета и появлению красного цвета; в этом местоположении зеленая полоса все еще дефокусирована, и, таким образом, субъекту еще не приходится прилагать усилие для аккомодации. Таким образом, это расстояние следует считать максимальным расстоянием наилучшей четкости.
[00249] Половина ширины функции рассеяния точки в фокусе составляет примерно 2 угловые минуты. Также едва различимый значимый размер расплывчатости составляет 0,15-0,2 дптр. Поскольку значимая хроматическая дисперсия составляет примерно 0,25 дптр, допущение, что размер дугообразных красных и зеленых полос является примерно одинаковым, т.е., составляет 2-4 угловые минуты, обеспечивает достаточное цветовое смешивание. Эта ситуация показана на ФИГ. 18А и 18В, на которых угловое разделение между смежными элементами составляет 90°/4=22,5°. Число элементов (полосчатых изображений) может быть изменено, например, до четырех с результирующим угловым разделением между смежными элементами 90°/3=30° (подобно часам).
[00250] Очевидно, что это испытание может быть выполнено только в случае, если субъект не страдает дальтонизмом.
[00251] Согласно некоторым вариантам реализации, на этапе обнаружения астигматического угла субъекту предлагают удерживать отображающее устройство на расстоянии, на котором все солнцевидное целевое изображение 35а выглядит расплывчатым. Субъекта просят приближать к себе отображающее устройство до тех пор, пока цвет по меньшей мере одной из полос мишени не переменится явным образом от желтого к красному. Если субъект не видит по меньшей мере одну из полос, размер мишени изменяют, и субъекта просят попробовать еще раз. Это может быть выполнено несколько раз. Результирующим углом является угол с уменьшенной астигматической преломляющей силой ("дальний цилиндр"). Ось цилиндра перпендикулярна результирующему углу. Выводимое расстояние является оценочным расстоянием для уменьшенной астигматической преломляющей силы.
[00252] На ФИГ. 19А и 19В показано комбинированное солнцевидное целевое изображение, содержащее изображение солнца и изображение концентрического черно-белого кольца в середине солнца согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 19А показано комбинированное солнцевидное целевое изображение 36а в том виде, как оно показано на экране для измерения астигматизм; и на ФИГ. 19В показано комбинированное солнцевидное целевое изображение 36b в том виде, как его видит субъект, имеющий астигматизм 180°.
[00253] Назначение этого комбинированного целевого изображения 36а состоит в улучшении идентификации оси астигматизма. Использование хроматической солнцевидной формы обеспечивает грубое разрешение, и, таким образом, разрешение комбинированного целевого изображения 36а может быть улучшено путем одновременного использования черно-белой концентрической кольцевой формы в том же самом целевом изображении.
[00254] Согласно некоторым вариантам реализации, субъекту в этом случае показывают целевое изображение 36а после грубой оценки оси. Яркая область в форме концентрических колец комбинированного целевого изображения 36а и нерасплывчатая часть солнцевидного изображения в форме бабочки являются перпендикулярными друг другу. Субъекту предлагают вращать перекрывающиеся визирные маркеры 11а и 11b для согласования этих индикаторов мишеней, т.е., с центральной осью отчетливого изображения в форме бабочки, сформированного из изображения в виде концентрических колец и наиболее четкой полосой солнцевидного изображения, как показано на ФИГ. 19В.
[00255] На ФИГ. 20А и 20В показано цветное целевое изображение 37а "концентрических колец", содержащее множество зеленых колец, причем одно из колец окрашено в красный цвет, на черном фоне, согласно некоторым вариантам реализации настоящего изобретения: на ФИГ. 20А показано целевое изображение 37а концентрических колец в том виде, как оно показано на экране, для измерения астигматизма; и на ФИГ. 20В показано целевое изображение 37b концентрических колец в том виде, как его воспринимает субъект, имеющий астигматизм 90°, с маркерной линией, размещенной субъектом поверх изображения в том местоположении, указывающем на центр изображения в форме бабочки, которая кажется ему наиболее четкой, в качестве входной обратной связи, на основании которой может быть получен угол астигматизма субъекта.
[00256] Целевое изображение может включать только частичную область концентрических колец, обеспечивающую достижение того же самого эффекта.
[00257] Целевое изображение 37а содержит концентрические кольца, окрашенные в зеленый цвет, на черном фоне с добавлением одного/нескольких красных колец. Данное целевое изображение 37а используют для дополнительного повышения точности идентификации оси астигматизма. Это целевое изображение 37а обеспечивает получение максимального расстояния наилучшей четкости согласно тому же самому принципу, описанному в отношении мишени с изображением в форме бабочки.
[00258] Субъекту показывают целевое изображение 37а после грубой оценки оси. Субъекту предлагают удерживать отображающее устройство на расстоянии, на котором все целевое изображение 37b выглядят расплывчатыми. Затем субъекту предлагают приблизить к себе отображающее устройство до достижения определенной точки согласно заданному условию. Из-за хроматической аберрация глаза, когда мишень приближается к расстоянию минимального смешивания (с приближением от дальнего расстояния к ближнему), красная полоса первой достигает точки, в которой она различается наиболее четко. Зеленая полоса все еще остается дефокусированной и смешивается красной полосой в ее местоположении, меняя ее цвет на желтый. На более близком расстоянии красная полоса дефокусирована и способствует изменению цвета зеленых полос. Таким образом, точка остановки устанавливается в момент, когда исчезает желтый цвет, и появляется красный цвет. В этом местоположении зеленая полоса все еще дефокусирована, и, таким образом, субъекту еще не приходится прилагать усилие для аккомодации. Таким образом, это расстояние следует считать максимальным расстоянием наилучшей четкости. Субъекту может быть предложено вращать маркер с индикаторной линией 39 для корректирования ориентации. Половина ширины функции рассеяния точки в фокусе составляет примерно 2 угловые минуты. Также едва различимый значимый размер расплывчатости составляет 0,15-0,2 дптр. Поскольку значимая хроматическая дисперсия составляет примерно 0,25 дптр, допущение, что размер дугообразных красных и зеленых полос является примерно одинаковым, т.е., составляет 2-4 угловые минуты, обеспечивает достаточное цветовое смешивание.
[00259] На ФИГ. 21А и 21В показаны два различных целевых изображения 701а и 702, каждое из которых имеет уникальный рисунок, используемый для дополнительного валидационного испытания, также называемого в настоящей заявке как "африканский тест", согласно некоторым вариантам реализации настоящего изобретения. На ФИГ. 21А показано целевое изображение 701а, содержащее чередующиеся наборы рядов желтых и красных эллиптических блоков (также упомянутые в настоящей заявке как "структурные элементы"), расположенных рядами. Целевое изображение представляет собой слоистую структуру с двумя (верхней и нижней) темно-зелеными полосами без средней темной полосы (изображение 701а) или со средней темно-зеленой полосой, имеющей более тонкую толщину чем верхняя и нижняя полосы (изображение 702). Указанные формы выбраны для изготовления пространственного рисунка с минимальным контрастом при наличии симметричной/сферической расплывчатости: основной периодический структурный элемент (изображение 710) состоит из разделенных равными промежутками элементов контрастного цвета во всех направлениях, и если имеет место симметричная расплывчатость, два основных цвета усредняются с формированием унифицированного рисунка. Нарушение периодической структуры (как в середине изображения 701а) сдвигает те же самые цвета ближе друг к другу с определенным размером. При данном размере указанные формы не будут изменять цвет в значительной степени под действием направленной расплывчатости, такой как цилиндрическая расплывчатость, согласованная с данным размером. Другой способ генерирования уникального рисунка под действием направленной расплывчатости показан на изображении 701/702, на котором целевое изображение представляет собой слоистую структуру с двумя (верхней и нижней) утолщенными темно-зелеными полосами. При наличии направленной расплывчатости (согласованной с вышеуказанным размером) два цвета расплываются в темную полосу без взаимного смешивания. В результате чего может быть образована полоса с рисунком из чередующихся желтого и красного цветов на черном фоне. Поскольку уровни яркости такого рисунка являются низкими, незначительное изменение цвета фона может вызвать изменение цвета рисунка. Использование темно-зеленого цвета оказывает влияние на рисунок, состоящий из чередующихся зелено-красных полос (изображение 701b).
[00260] На ФИГ. 22 показано увеличенное изображение рисунка 710 целевых изображений 701а и 702, показанных на ФИГ. 21А и 21В, имеющих наклон в одном из возможных чередующихся направлений.
[00261] На ФИГ. 23 показано, как целевое изображение, показанное на ФИГ. 21А, выглядит на расстоянии, на котором субъекту предложено остановить перемещение (максимальное расстоянии наилучшей четкости), где наличие чередующихся нижнего и верхнего зелено-красного рисунков и среднего красно-желтого рисунка является наиболее очевидным. Это происходит на конкретном расстоянии, на котором комбинация сферы и цилиндра образуют известную расплывчатость.
[00262] На ФИГ. 24А и 24В показано увеличенное изображение рисунка целевого изображения 701а, показанного на ФИГ. 21А.
[00263] Изображения 701а или 702 используются для проверки уже измеренных сферической и цилиндрической ошибок субъекта. Например, на экране показывают целевое изображение 701а, и субъекту предлагают расположиться перед экраном на максимальном расстоянии наилучшей четкости, на котором чередующиеся красно-зеленый и красно-желтый рисунки видны лучше всего (изображение 701b). В этой точке остановки расплывчатость включает как сферическую расплывчатость, так и цилиндрическую расплывчатость. На основании оценки двух или большего количества подобных мишеней, которые отличаются размером, комбинации полученных расстояний могут быть соотнесены с конкретными сферической и цилиндрической ошибками. Эти размеры изображения определены в соответствии со сферической и цилиндрической ошибками (астигматизмом) предыдущего испытания. В случае, если субъект имеет астигматизм 90°, он будет видеть изображение 701b, как показано на ФИГ. 23, в положении точки остановки для конкретного субъекта. В этом виде изображения 701b верхние и нижние утолщенные темно-зеленые полосы исходного целевого изображения 701а могут выглядеть как коричневые/красные и зеленые чередующиеся элементы, а средняя темная полоса, вместо этого, выглядит как чередующиеся желтые и красные элементы.
[00264] Расплывчатости вследствие сферической ошибки и астигматической ошибки влияют на целевое изображение 701а различным способом. Таким образом, при любой другой астигматической расплывчатости (кроме 90°) ориентация и размер целевого изображения 701а должны быть изменены для получения заметного эффекта.
[00265] Области рисунка в целевом изображении 701а, которые являются фоном, становятся унифицированными для размера расплывчатости близкого к 2xh. Это ожидается, так как эллиптические элементы соседних рядов усреднены, как показывается на ФИГ. 24А и 24В. Две темно-зеленые линии, имеющие высоту 1xh, получают окраску от соседних рядов: красные и зеленовато-желтоватые участки созданы расплывчатостью. Их контраст намного ниже чем при астигматической расплывчатости, поскольку в случае астигматической расплывчатости красный оттенок создается только красным рядом, и зеленоватый оттенок создается желтыми нижним и верхним рядами (как показано на ФИГ. 24В), в то время как в случае сферической расплывчатости только структурные элементы рефракционной ошибки рисунка красного и желтого цветов начинают смешиваться друг с другом и уменьшать контрастность при продолжающемся росте сферической расплывчатости (как показано на ФИГ. 24А).
Одновременное присутствие сферической и астигматической расплывчатости: этот эффект наблюдается, когда пятно расплывчатости имеет форму эллипса, а не круглого диска. Таким образом, вертикальный компонент усиливает проявление всех вышеупомянутых (трех) эффектов, в то время как горизонтальный компонент ослабляет. Если целевое изображение 701а имеет постоянный размер и перемещается в осевом направлении, для каждого местоположения: (а) наблюдаются различные эффекты расплывчатости; (b) изменяется интенсивность взаимодействия вертикального и горизонтального компонентов; и (с) изменяется отношение пятна расплывчатости к высоте "h".
[00266] Отношение расплывчатости к рефракционной ошибке: Поскольку расплывчатость является значительной, действует следующее геометрическое отношение:
[00267] 
[00268] где: - угловой размер пятна расплывчатости; Dpupil - диаметр зрачка; и ΔL - диоптрическая ошибка.
- угловой размер пятна расплывчатости; Dpupil - диаметр зрачка; и ΔL - диоптрическая ошибка.
[00269] 
[00270] Целевое изображение 701а или 702 вращают на тот же самый угол, который найден в концентрических кругах, но смещенный на 90° до появления четко различимой линии на ярком солнцевидном изображении.
[00271] Согласно некоторым вариантам реализации испытательная процедура включает следующие этапы: (i) субъекта просят перемещать отображающее устройство в направлении от себя до тех пор, пока вся мишень не станет расплывчатой, и, затем, (ii) субъекту предлагают начать приближать к себе отображающее устройство до тех пор, пока он не увидит описанный выше эффект. Затем, (iii) размер мишени изменяют, и субъекта просят повторить испытание. Процедуру выполняют несколько раз с мишенями в различных масштабах. Точки остановки в каждой такой итерации являются различными из-за изменений угла наблюдения, которому противолежит высота "h" (как показано на ФИГ. 710), и весовых значений сферической и цилиндрической компонент пятна расплывчатости. Соответственно регистрируют несколько расстояний. Поскольку размер и характеристики целевого изображения являются известными, их используют для вычисления астигматической преломляющей силы и уточнения предыдущих результатов сферической и астигматической преломляющих сил.
[00272] На ФИГ. 25 показан другой дополнительный структурный элемент 711 для рисунка для валидационного испытания, согласно другим вариантам реализации настоящего изобретения.
[00273] На ФИГ. 26 показан еще один дополнительный структурный элемент 712 для рисунка для валидационного испытания согласно другим вариантам реализации настоящего изобретения.
[00274] На ФИГ. 27А и 27В показана блок-схема способа оптометрического испытания на измерение рефракционной ошибки глаза субъекта, включающего измерения эквивалентной преломляющей силы сферы и астигматизма с использованием некоторых или всех различные целевые изображений согласно настоящему изобретению, описанных выше, согласно некоторым вариантам реализации настоящего изобретения; на ФИГ. 27В показано продолжение блок-схемы способа, показанной на ФИГ. 27А. Процесс выполняется системой с использованием предназначенного для этой цели программного приложения, управляющего персональным устройством субъекта, таким как планшетный персональный компьютер или смартфон субъекта, с использованием датчика камеры персонального устройства или внешнего датчика, управляемого персональным устройством.
[00275] Первоначально на этапе 801 выполняют испытание на визуальную четкость (VA), например, путем использования целевого изображения (целевых изображений) букв, такого как изображения 30 и/или 31а. На этапе 802 результирующие грубо оцененные данные о эквивалентной преломляющей силе сферы (RE-SEP) из испытания VA могут быть дополнительно сохранены наряду с максимальным расстоянием наилучшей четкости для данного субъекта. Испытанию VA может предшествовать калибровочное испытание на возможность измерения, например, элемента лица субъекта, такого как ширина исследуемого или неисследуемого глаза на расстоянии измерения, как описано выше. Согласно другому варианту реализации, для измерения расстояния субъекту может быть предложено удерживать эталонный элемент поверх неисследуемого глаза,
[00276] Если на этапе 803 определено, что значение грубо оцененной эквивалентной преломляющей силы сферы (RE-SEP) находится в пределах заданного диоптрического диапазона (например, 0-9 дптр), субъекту разрешают использовать приложение для испытания рефракционной ошибки. Если указанное значение грубо оцененной эквивалентной преломляющей силы сферы (RE-SEP) выходит за пределы заданного диапазона, приложение не может быть использовано для выполнения достаточно точного измерения, и, таким образом, на этапе 805 способ завершается.
[00277] Затем на этапе 804 с использованием данного приложения определяют, превышает ли значение грубо оцененной эквивалентной преломляющей силы сферы (RE-SEP) заданное пороговое значение, для выбора на этапах 806-807 соответствующего размера экрана (и, таким образом, соответствующего персонального устройства), необходимого для испытания субъекта.
[00278] После выбора размера экрана и, таким образом, типа персонального устройства, на этапе 808 выбирают соответствующий размер целевого изображения для испытания цилиндрической ошибки согласно результатам определения грубо оцененной эквивалентной преломляющей силы сферы (RE-SEP), и на этапе 809 выполняют испытание на ошибку дальнего цилиндра, например, путем хроматического испытания, как описано в соответствии с ФИГ. 15А-20В. Грубая оценка ошибки дальнего цилиндра на этапе 810 может включать использование хроматического солнцевидного целевого изображения (как показано на ФИГ. 18А-18В) и одно или большее количество испытаний на уточнение с использованием, например, одного или большего количества из: (1) черно-белого целевого изображения концентрических колец (как показано на ФИГ. 4J-4L); (2) комбинированного хроматического солнцевидного и черно-белого целевого изображения концентрических колец (как показано на ФИГ. 19А-19В); и/или (3) хроматического целевого изображения концентрических колец (как показано на ФИГ. 20А-20В).
[00279] На этапе 811 также выполняют проверку на ошибку ближнего цилиндра с использованием, например, целевого изображения в форме бабочки (как показано на ФИГ. 15А-15В). Если на этапе 812 обнаружена цилиндрическая ошибка, на этапе 813 выполняют уточненное испытание на преломляющую силу и угол цилиндра, например, с использованием "африканского испытания", как описано в соответствии с ФИГ. 21А-23.
[00280] Если на этапе 812 цилиндрическая ошибка не обнаружена, на этапе 814 может быть выполнено испытание на уточнение эквивалентной преломляющей силы сферы, например, путем выполнения одного или большего количества испытаний с использованием по меньшей мере одного из следующих целевых изображений: (1) красные и синие/зеленые буквы (как показано на ФИГ. 14А-4В); (2) целевое изображение в форме бабочки (как показано на ФИГ. 15А-15В) под произвольными углами; и/или (3) целевое изображение, на котором показаны два перекрывающихся перпендикулярных изображения в форме бабочки.
[00281] В любом из описанных выше испытаний пользовательский интерфейс данного приложения обеспечивает возможность инструктировать субъекта в течение всего испытания с одновременным обеспечением входной платформы для ввода данных и рабочих команд, таких как при управлении камерой для захвата изображения лица субъекта, когда он считает, что достиг положения максимального расстояния наилучшей четкости и т.п. Приложение также быть выполнено с возможностью инструктирования субъекта для коррекции способа, которым он удерживает персональное устройство или камеру. Инструкции могут быть показаны визуально и/или воспроизведены в звуковой форме, например, в форме предварительно записанных голосовых команд, и/или переданы в тактильной форме, например, с использованием вибрационной функции персонального устройства. Например, для предложения субъекту повернуть устройство в конкретном направлении, оно может усилить вибрацию при повороте вправо и ослабить вибрацию при повороте в противоположном направлении.
[00282] В любом одном или большем количестве целевых изображений могут быть использованы любые формы, симметрии и цвета для измерения любых одного или большего количества аспектов рефракционной ошибки субъекта. Настоящее изобретение не ограничивается целевыми изображениями, показанными выше, и другие новые или известные целевые изображения могут быть использованы. Целевые изображения, представленные в настоящей заявке, также могут быть модифицированы, окрашены в другие цвета или могут иметь другие ширину линий или текстуру.
[00283] Согласно некоторым вариантам реализации настоящего изобретения, предложен способ коррекции для исправления преломляющих сил цилиндра и сферы. Процесс коррекции включает этапы, согласно которым: принимают угол астигматизма, преломляющую силу цилиндра и преломляющую силу сферы, полученные из предыдущего обследования субъекта, отображают целевое изображение с уникальным рисунком в области отображения, повернутое на угол астигматизма субъекта согласно принятому углу астигматизма, причем указанное целевое изображение с уникальным рисунком показывают в области отображения по меньшей мере в двух размерах, при этом каждый размер вычислен в соответствии с принятой преломляющей силой цилиндра и преломляющей силой сферы. Для каждого размера показанного целевого изображения с уникальным рисунком предлагают субъекту установить расстояние до целевого изображения, на котором он распознает заданный визуальный эффект, для каждого размера показанного целевого изображения с уникальным рисунком, измеряют расстояния между целевым изображением с уникальным рисунком и исследуемым глазом субъекта и повторно вычисляют преломляющую силу цилиндра и преломляющую силу сферы согласно измеренным расстояниям.
[00284] Специалистами могут быть внесены различные изменения и модификации в настоящее изобретение без отступления от сущности и объема защиты настоящего изобретения. Таким образом, следует понимать, что показанный на чертеже вариант реализации сформулирован только в качестве примера, и что он не должен рассматриваться как ограничение настоящего изобретения, описанного в настоящей заявке, и его различных вариантов реализации, и/или в нижеследующей формуле изобретения. Например, несмотря на тот факт, что элементы какого-либо пункта приложенной формулы изложены ниже в определенной комбинации, явно подразумевается, что настоящее изобретение включает другие комбинации, содержащие уменьшенное или увеличенное количество элементов или отличающиеся элементы, которые описаны выше, даже если они первоначально не требуются в таких комбинациях. Заявление, что два элемента комбинированы в заданной комбинации, дополнительно должно пониматься как также учитывающее требуемую комбинацию, в которой эти два элемента не комбинируются друг с другом, но могут использоваться по отдельности или в других комбинациях. Исключение любого описанного элемента настоящего изобретения явно рассматривается как попадающее в объем защиты настоящего изобретения.
[00285] Термины, используемые в настоящей заявке для описания настоящего изобретения и различных вариантов его реализации, должны быть поняты не только в смысле их обычных значений, но также включают их специфическое определение в данной конкретной структуре, материале, или действуют за пределами объема обычно заданных значений. Таким образом, если элемент может быть понят в контексте этого описания как включающий больше чем одно значение, то его использование в пункте приложенной формулы должно быть понято как универсальное и применимое ко всем возможным значениям, поддерживаемым настоящим описанием и непосредственно терминами.
[00286] Определения терминов или элементов в пунктах приложенной формулы, таким образом, даны в настоящем описании для включения не только комбинации элементов, которая сформулирована буквально, но также всей эквивалентной структуры, материала или действий для выполнения по существу той же самой функции по существу тем же самым способом для получения по существу того же самого результата. В этом смысле, таким образом, следует считать, что эквивалентная замена двух или большего количества элементов может быть выполнена для любого из элементов в пунктах приложенной формулы, или что одиночный элемент может быть заменен двумя или большим количеством элементов в пункте приложенной формулы. Несмотря на то, что элементы могут быть описаны выше как действующие в определенных комбинациях и даже первоначально заявленные как таковые, следует понимать, что один или большее количество элементов из заявленной комбинации в некоторых случаях могут быть удалены из данной комбинации, и что заявленная комбинация может быть направлена на подкомбинацию или модификацию подкомбинации.
[00287] Несущественные изменения в заявленном объекте настоящего изобретения, на взгляд специалиста, известные в настоящее время, или которые могут быть разработаны позже, явно рассматриваются как эквивалентно попадающие в объем защиты пунктов приложенной формулы. Таким образом, очевидные изменения, известные теперь или которые станут известными позже специалисту, должны рассматриваться как попадающие в объем защиты заданных элементов.
[00288] Пункты приложенной формулы, таким образом, должны быть поняты как включающие все то, что конкретно показано и описано выше, как концептуально эквивалентные элементы, которые могут быть с очевидностью заменены, а также все то, что по существу содержит основную идею настоящего изобретения.
[00289] Несмотря на то, что настоящее изобретение описано подробно, изменения и модификации, которые не отступают от описания настоящего изобретения, являются очевидными для специалистов. Такие изменения и модификации, как подразумевается, находятся в пределах объема защиты настоящего изобретения и пунктов приложенной формулы.
ССЫЛКИ
1. R. BEDFORD and G. WYSZECKI, "Axial Chromatic Aberration of the Human Eye," J. Opt. Soc. Am. 47, 564_l-565 (1957).
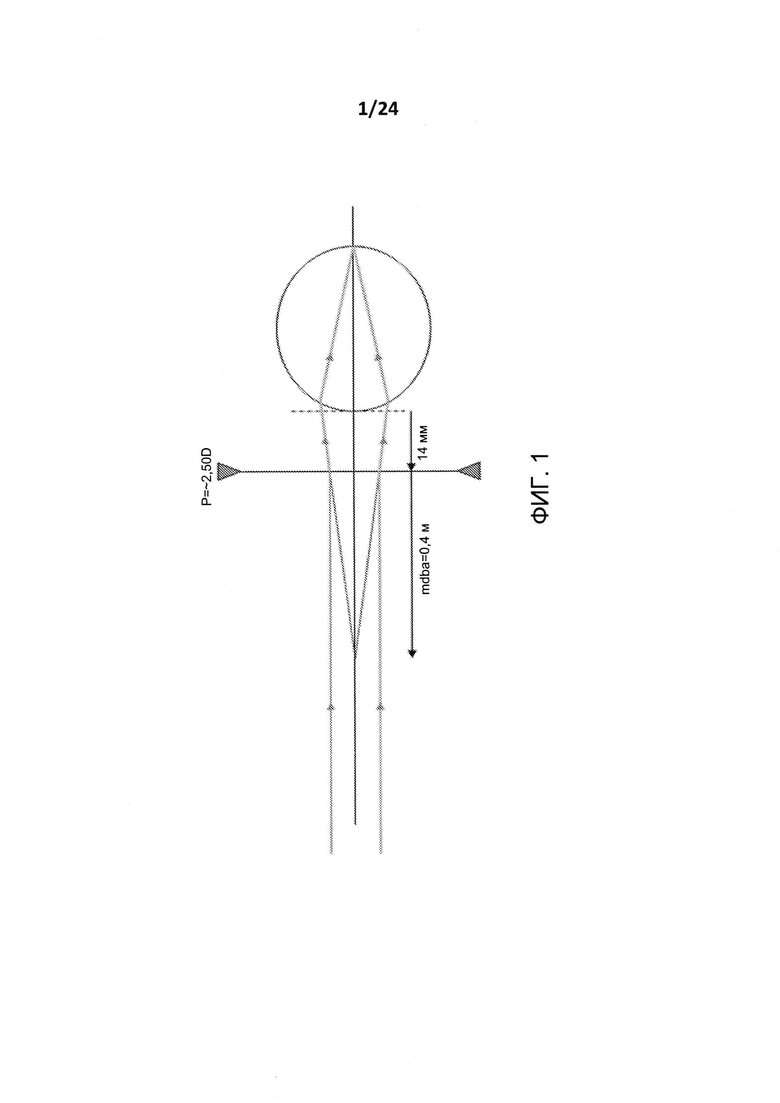
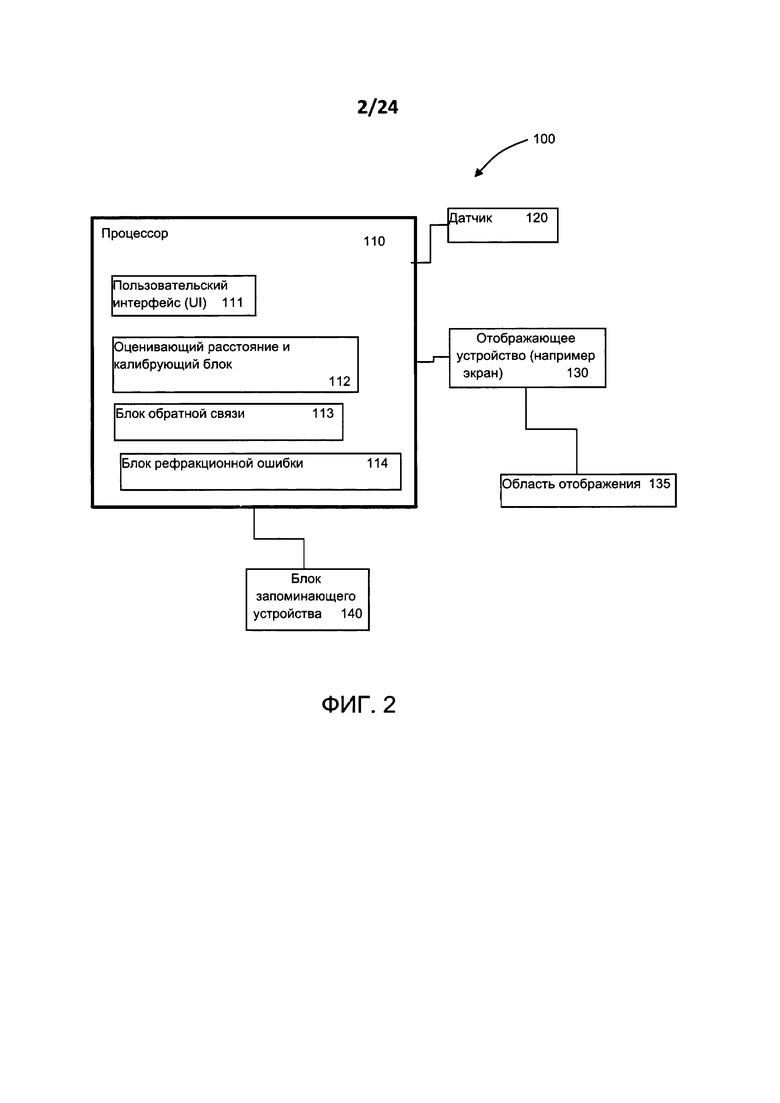
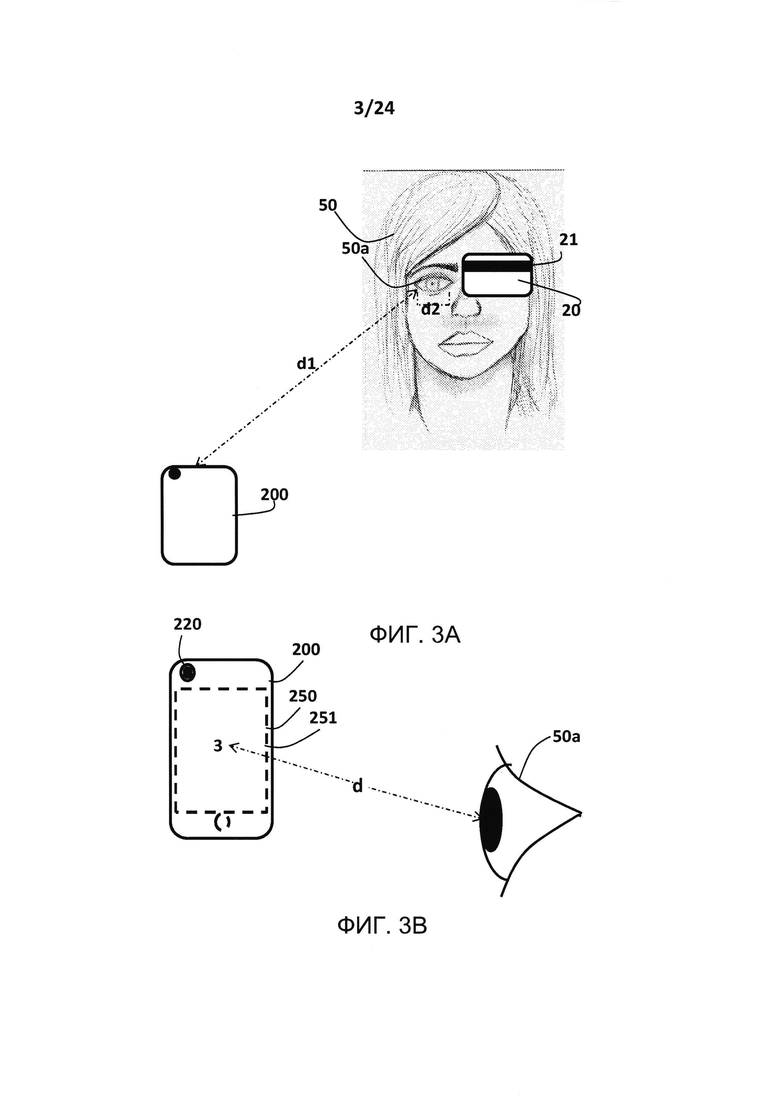
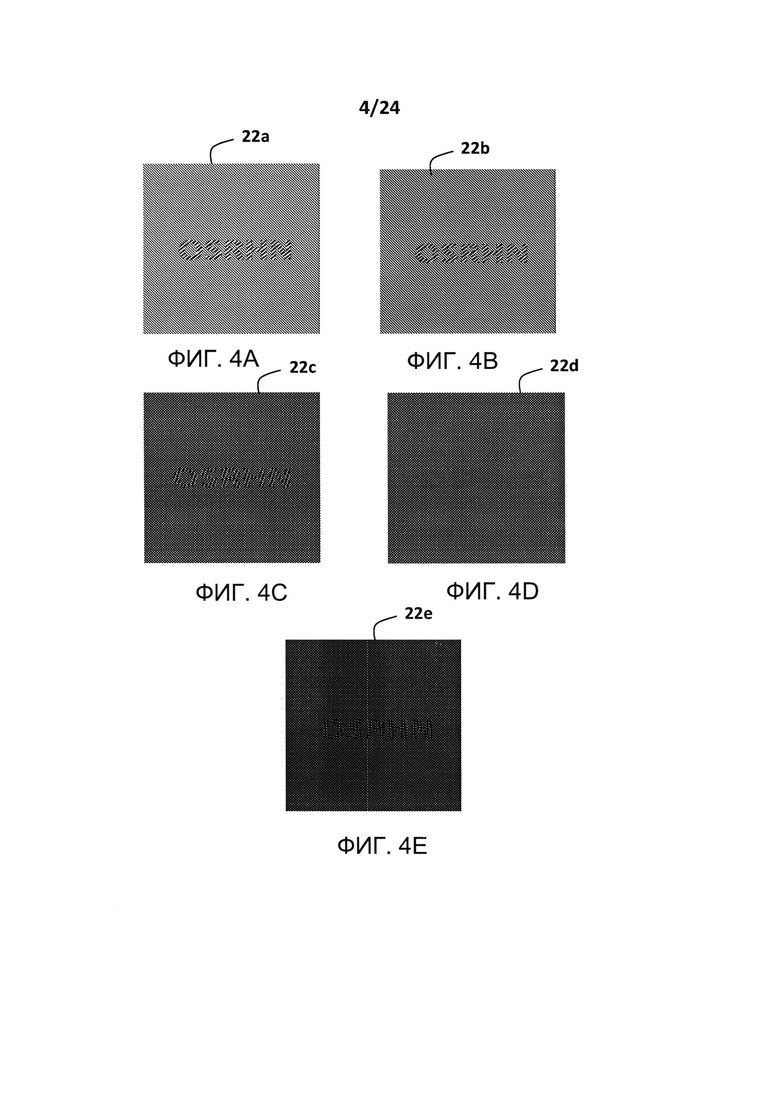
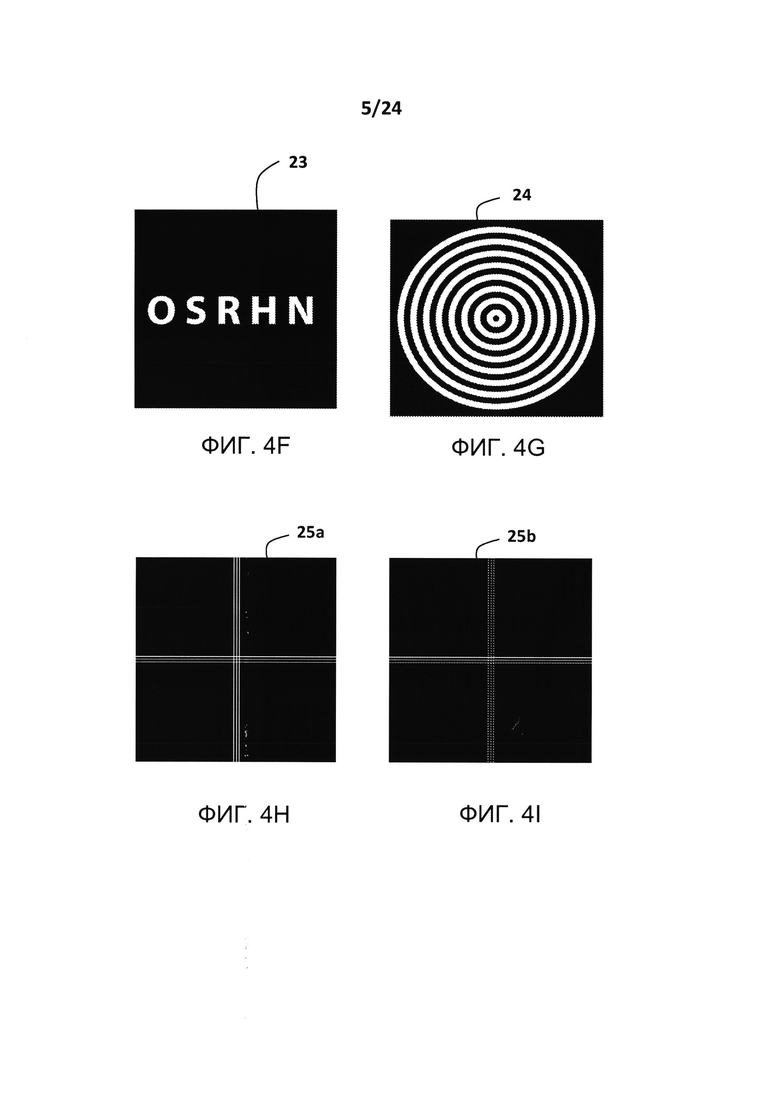
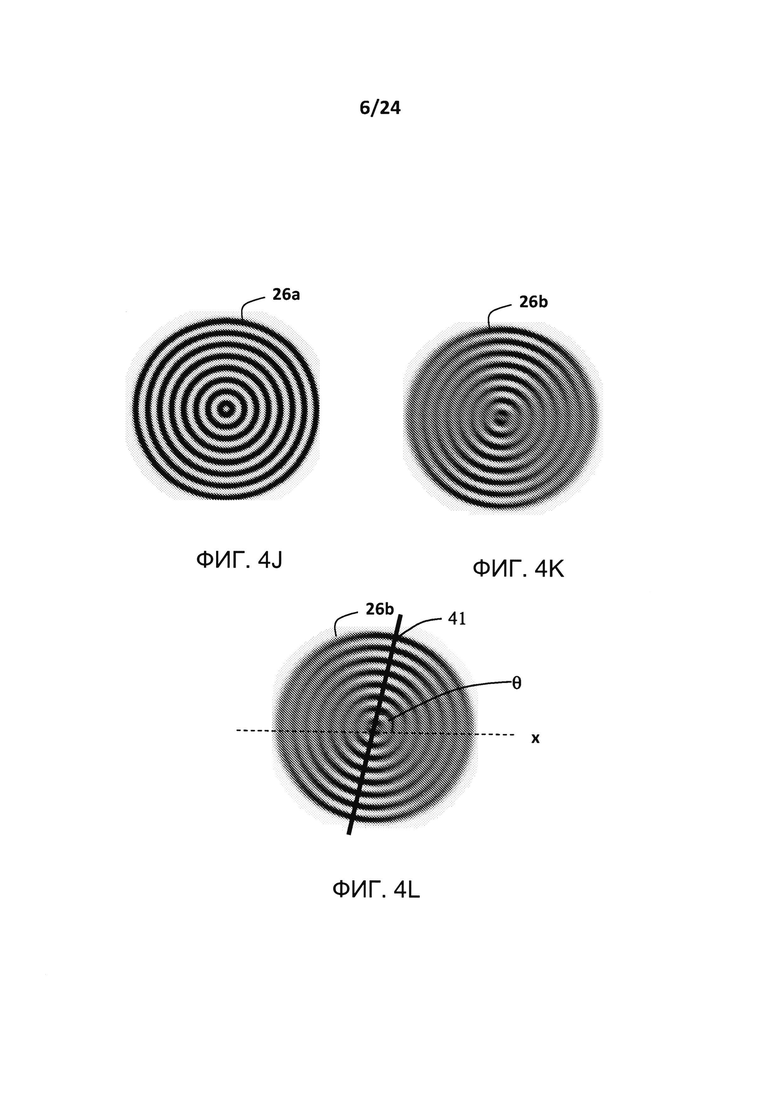
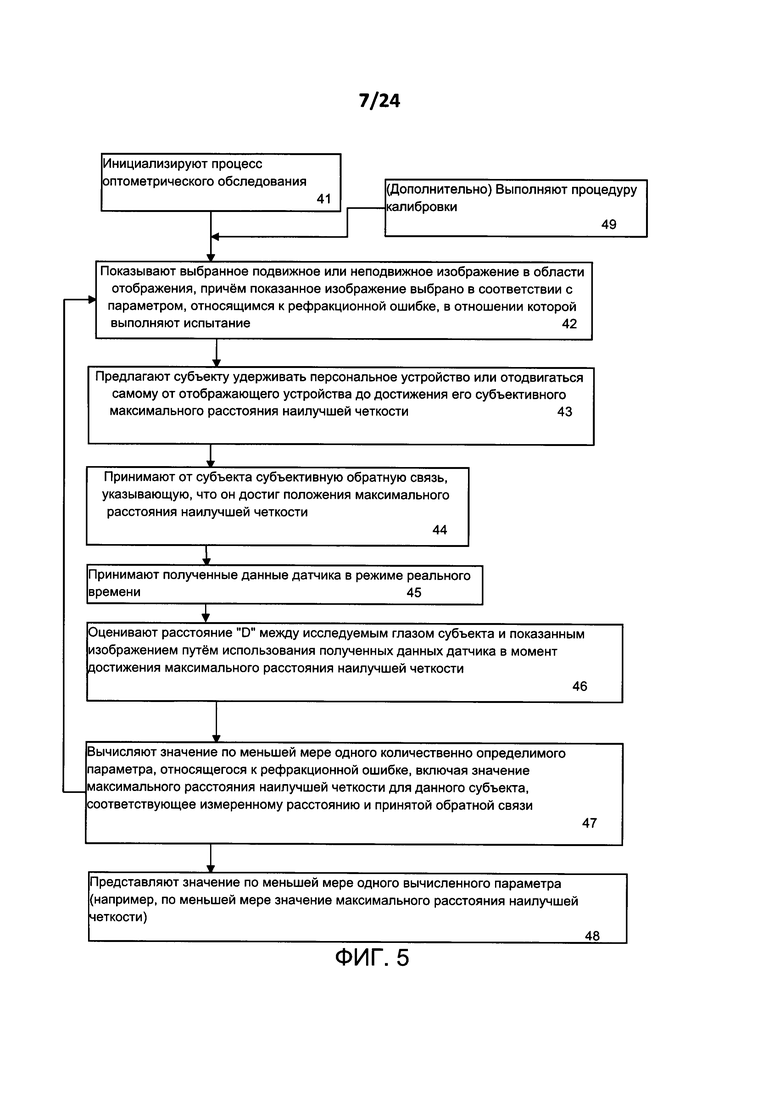
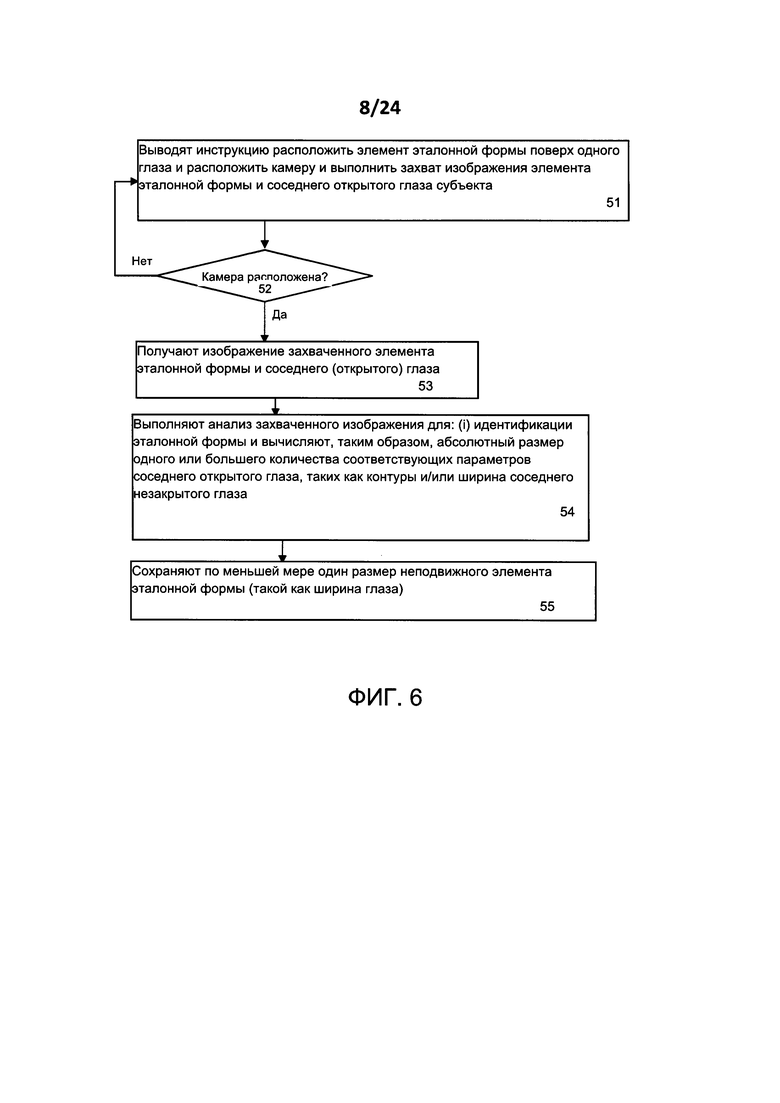
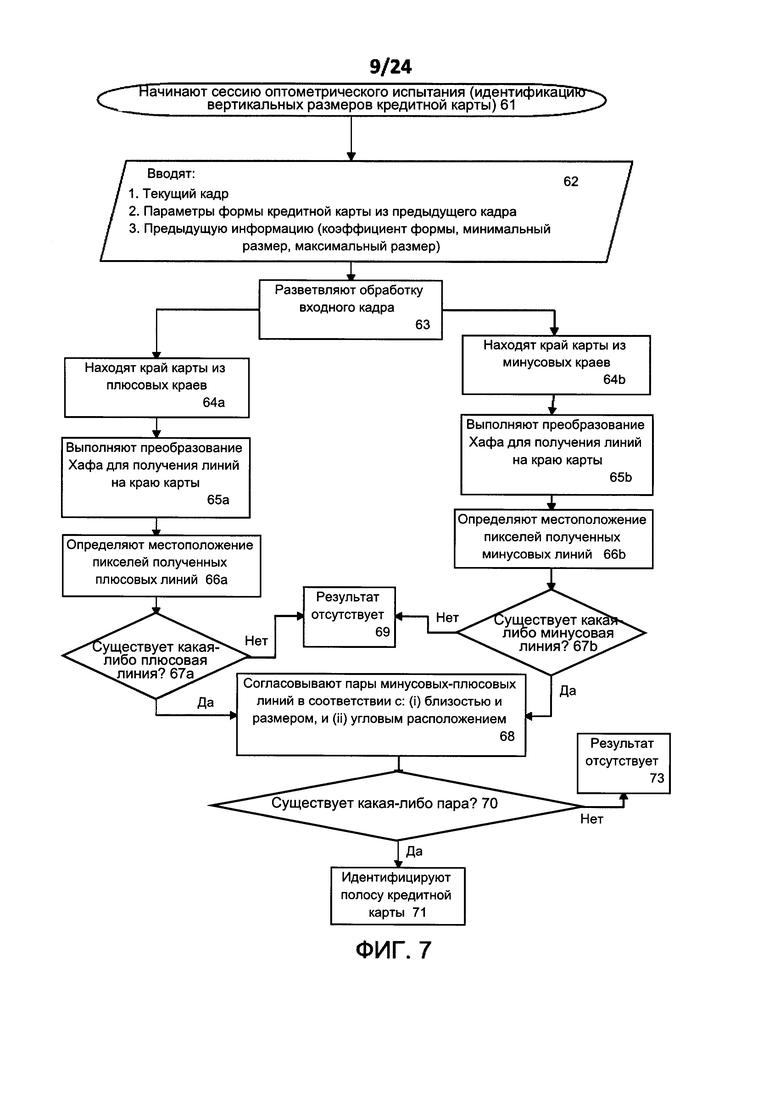
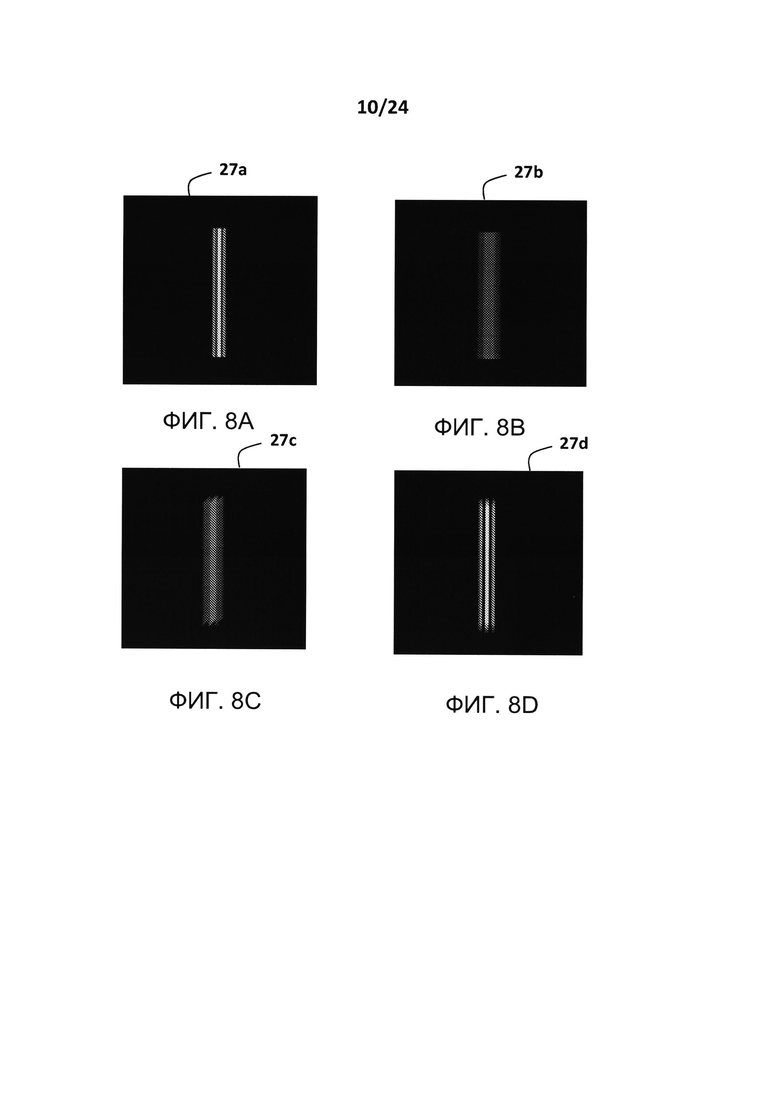
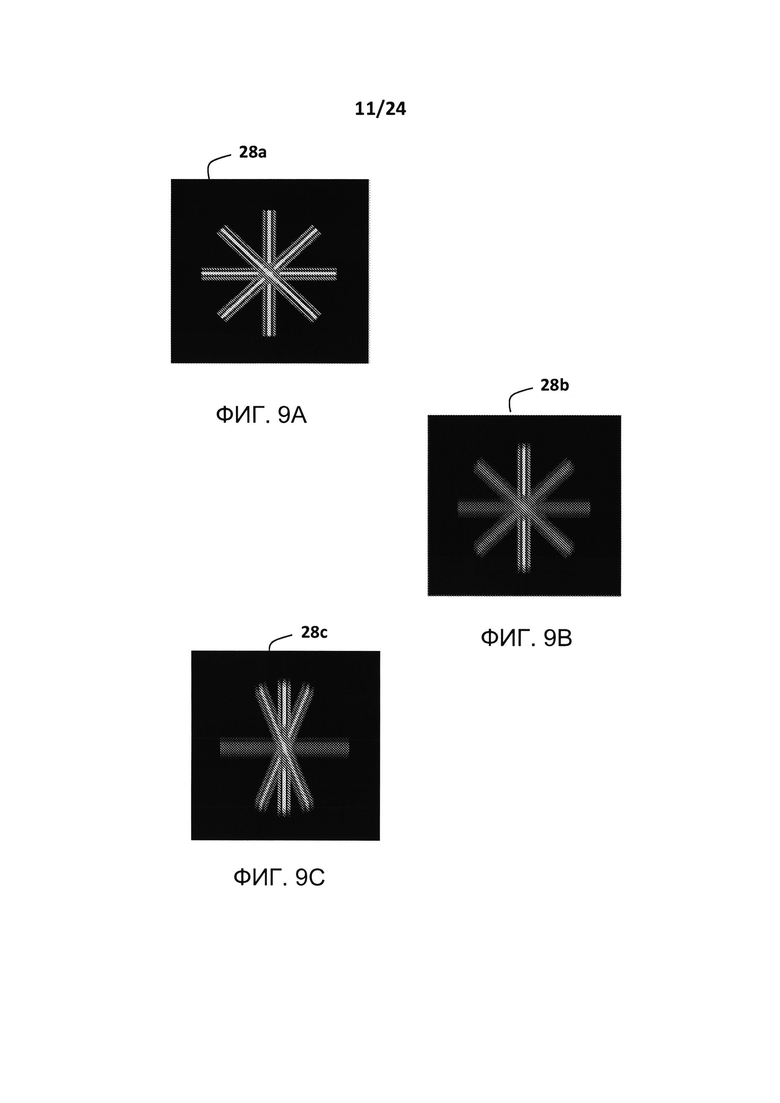
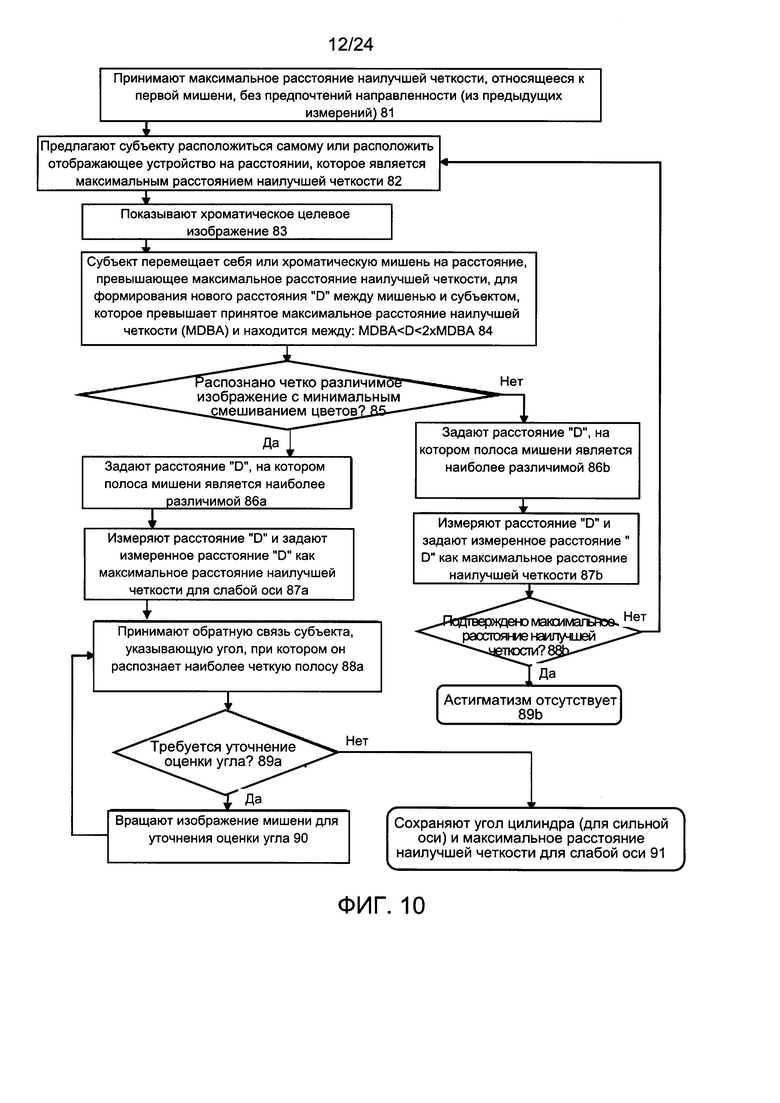
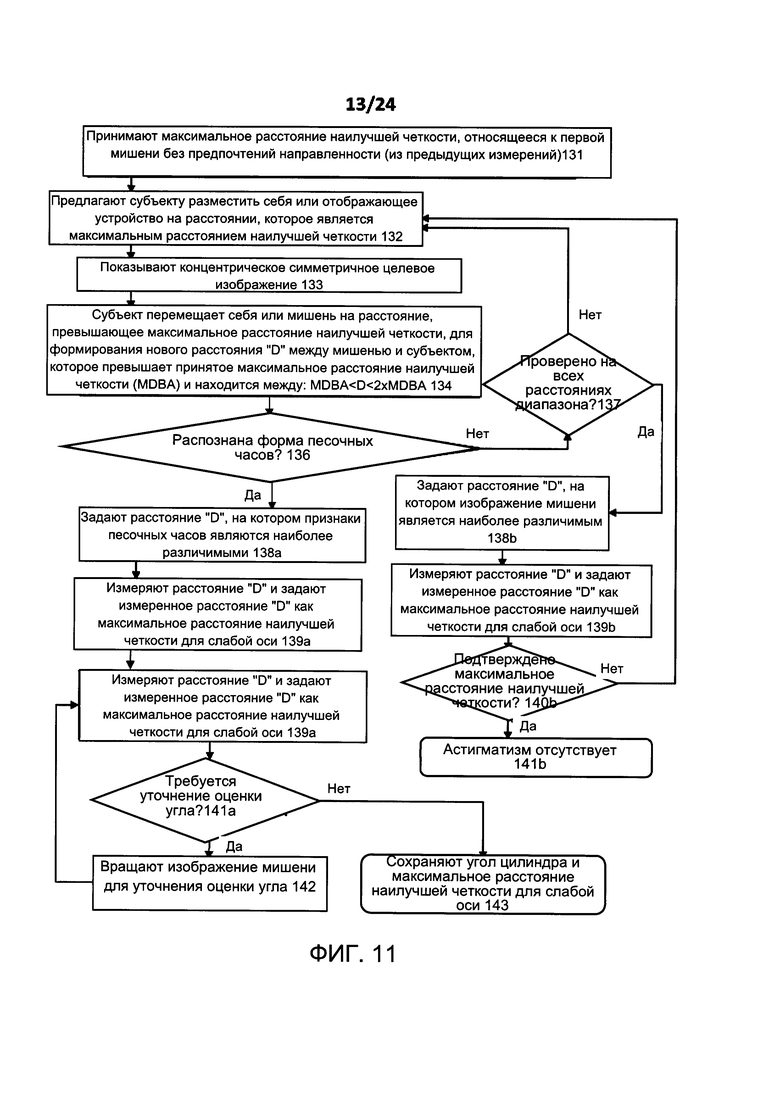
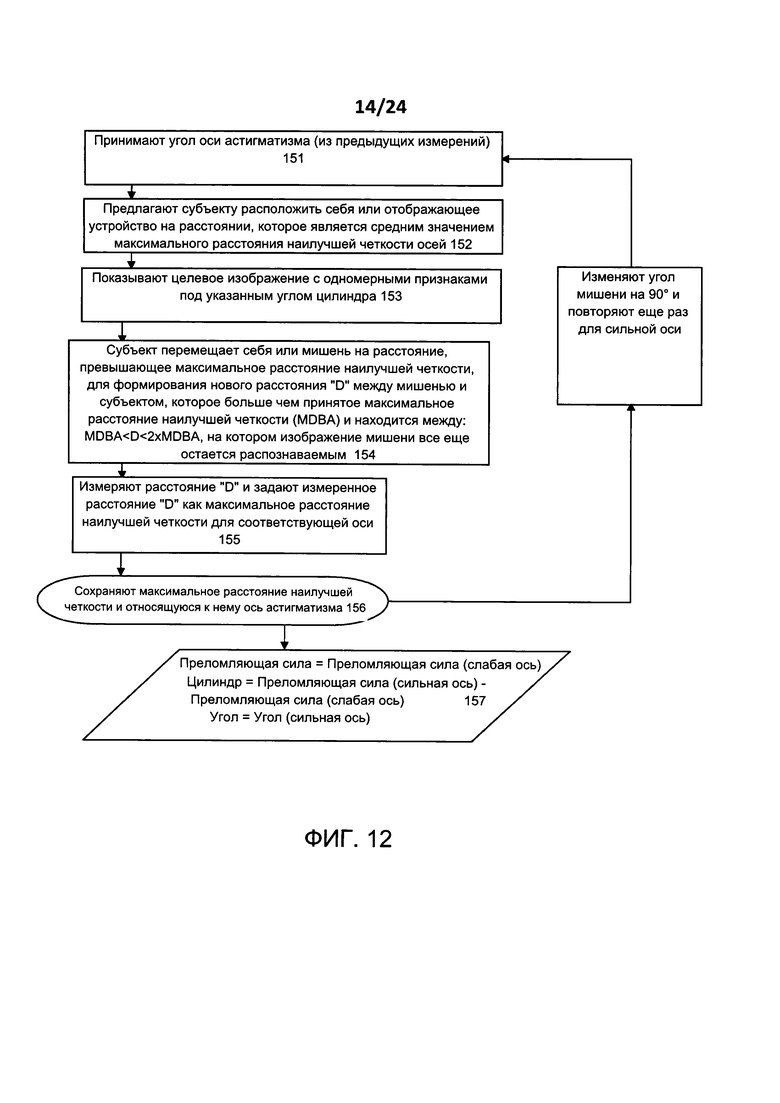
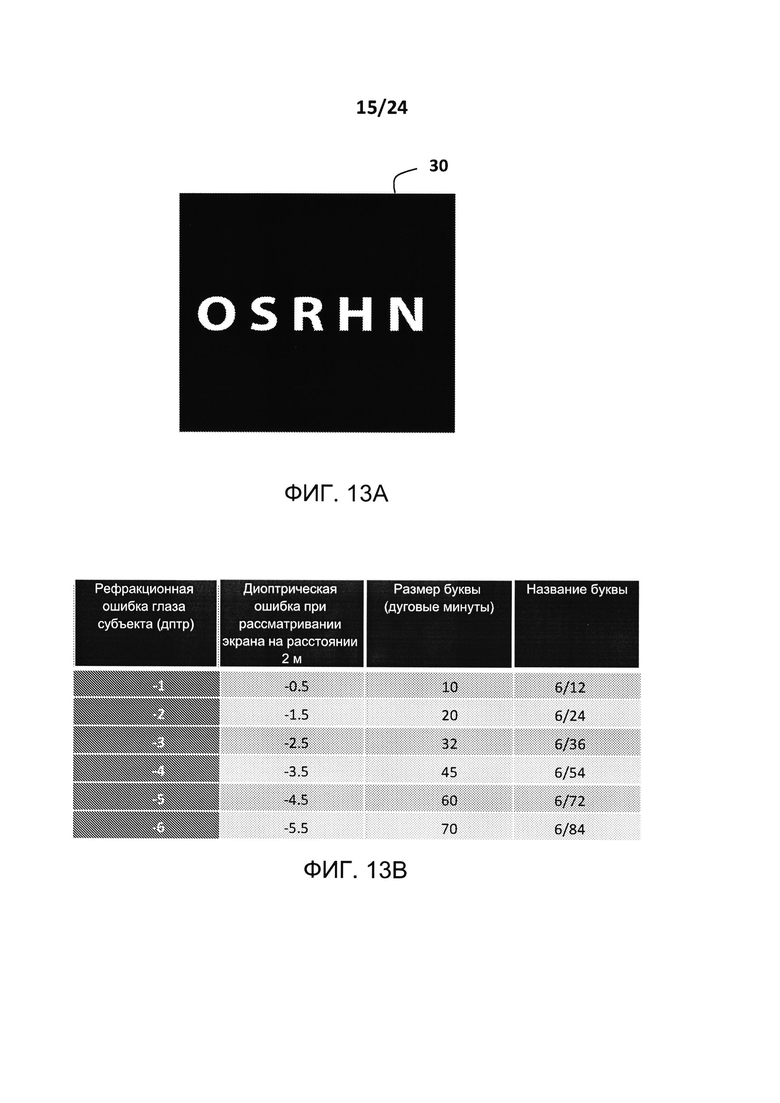
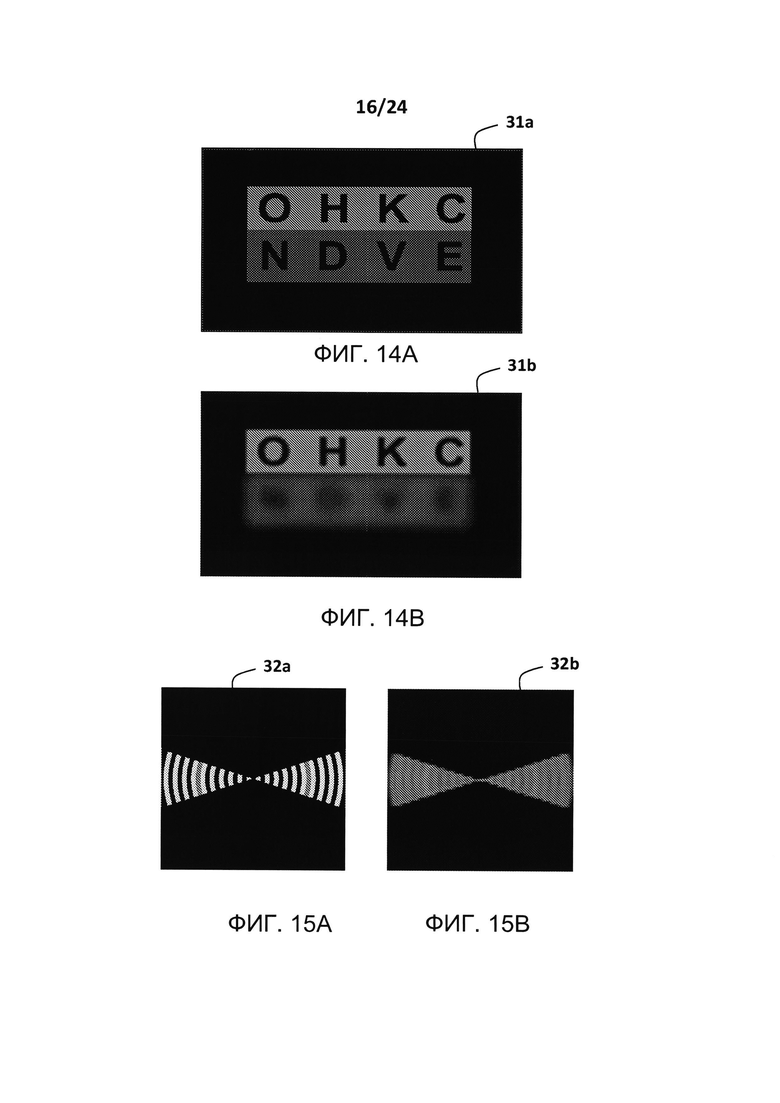
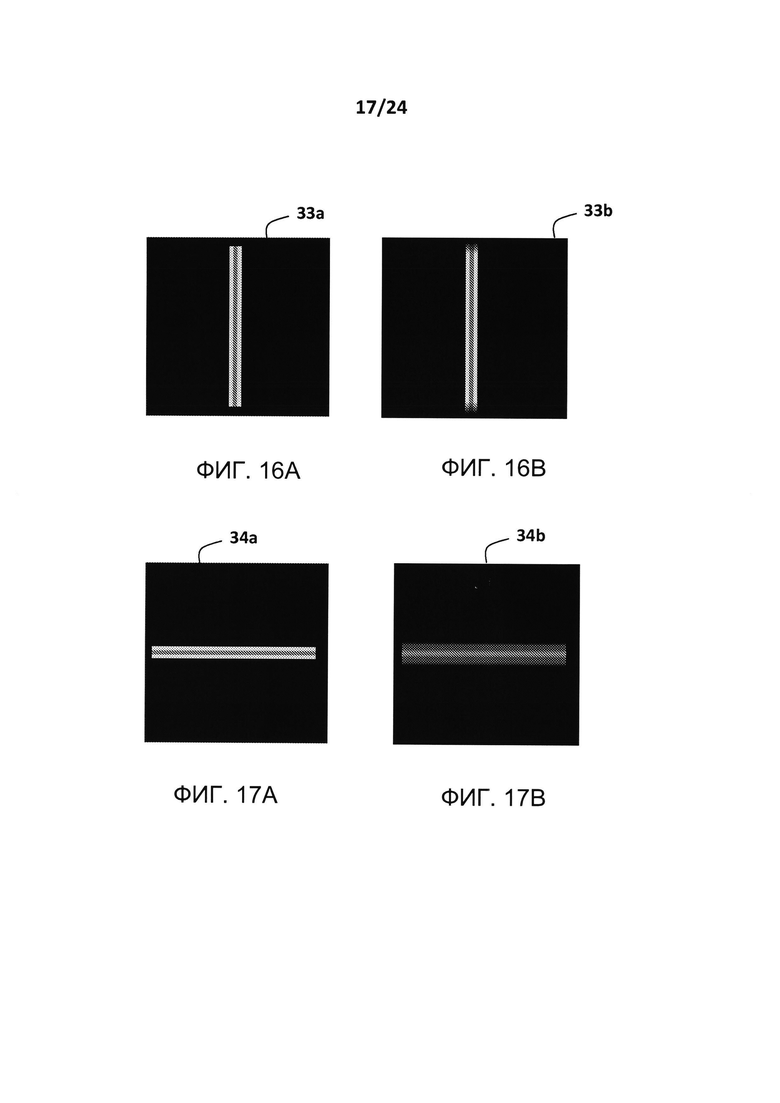

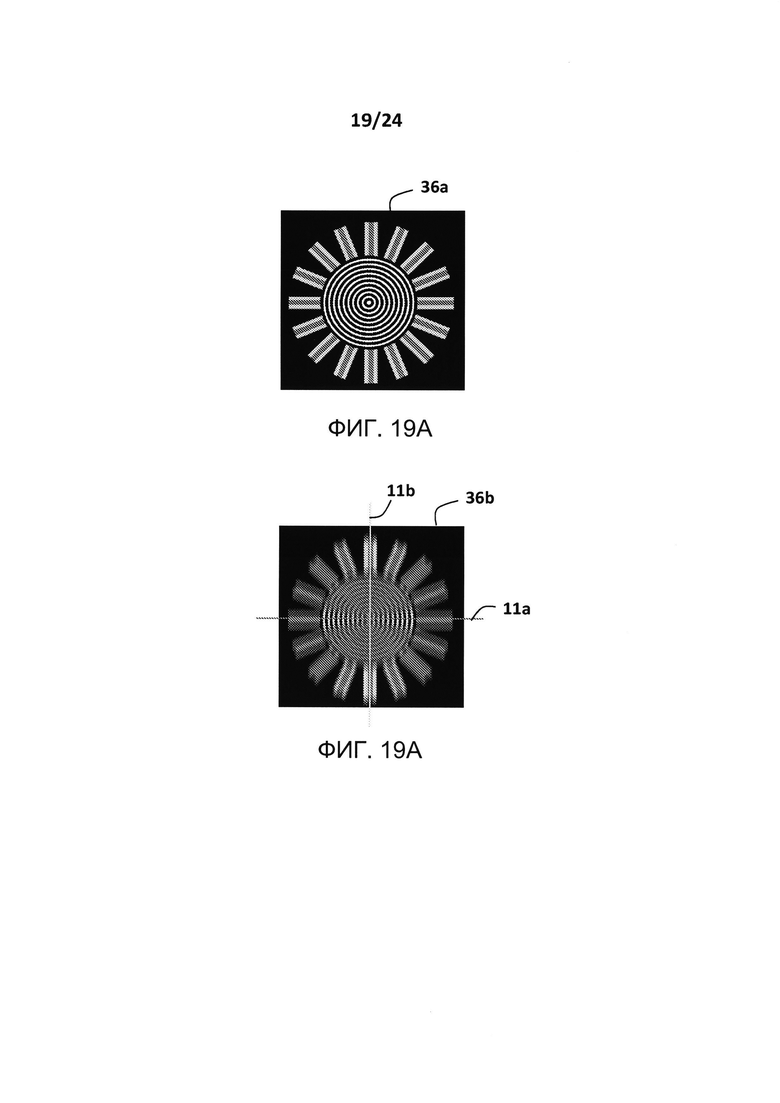
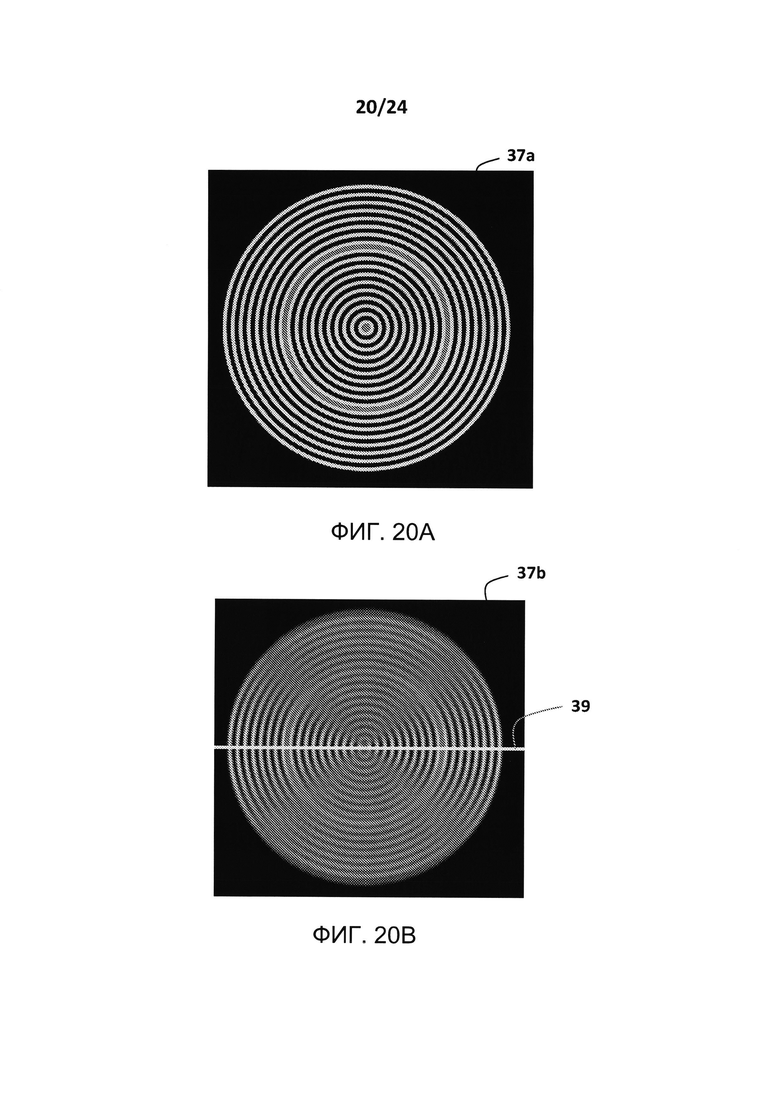
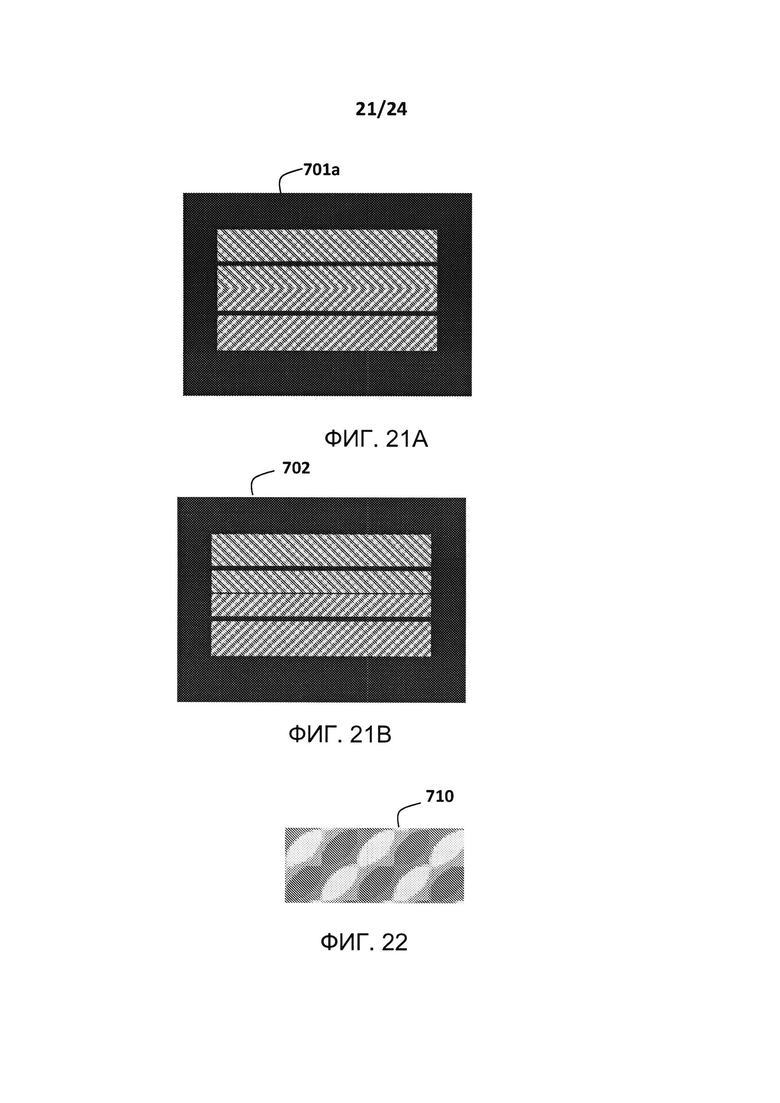
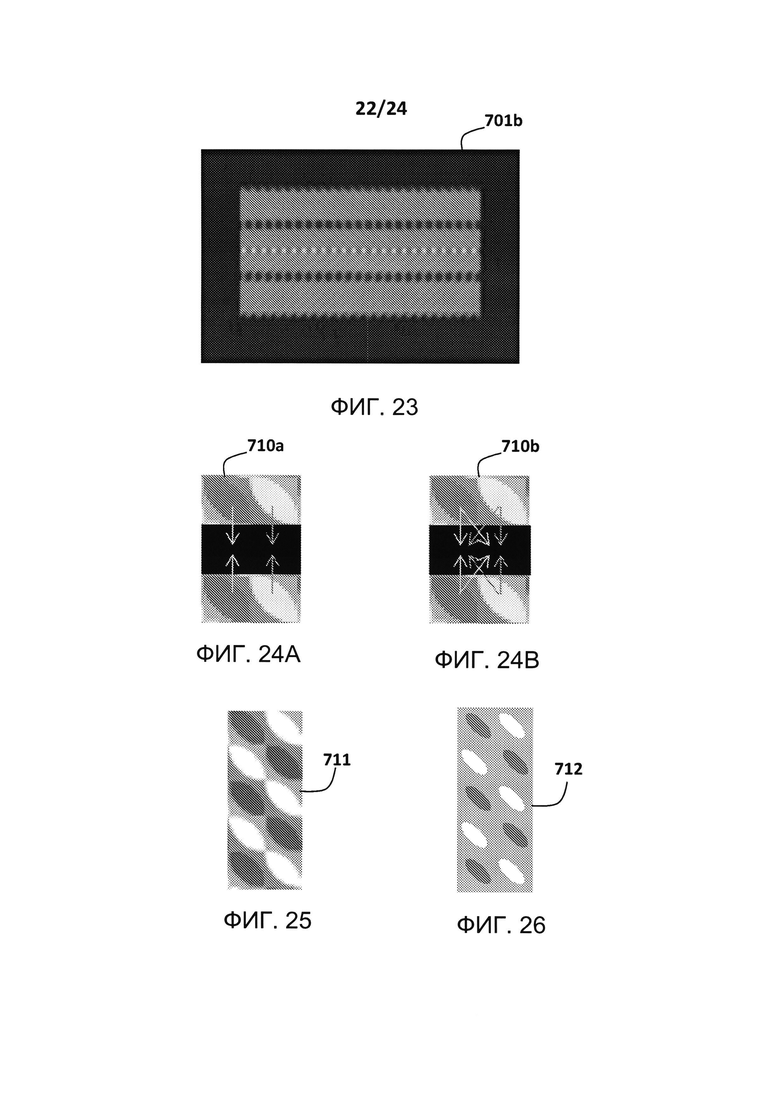
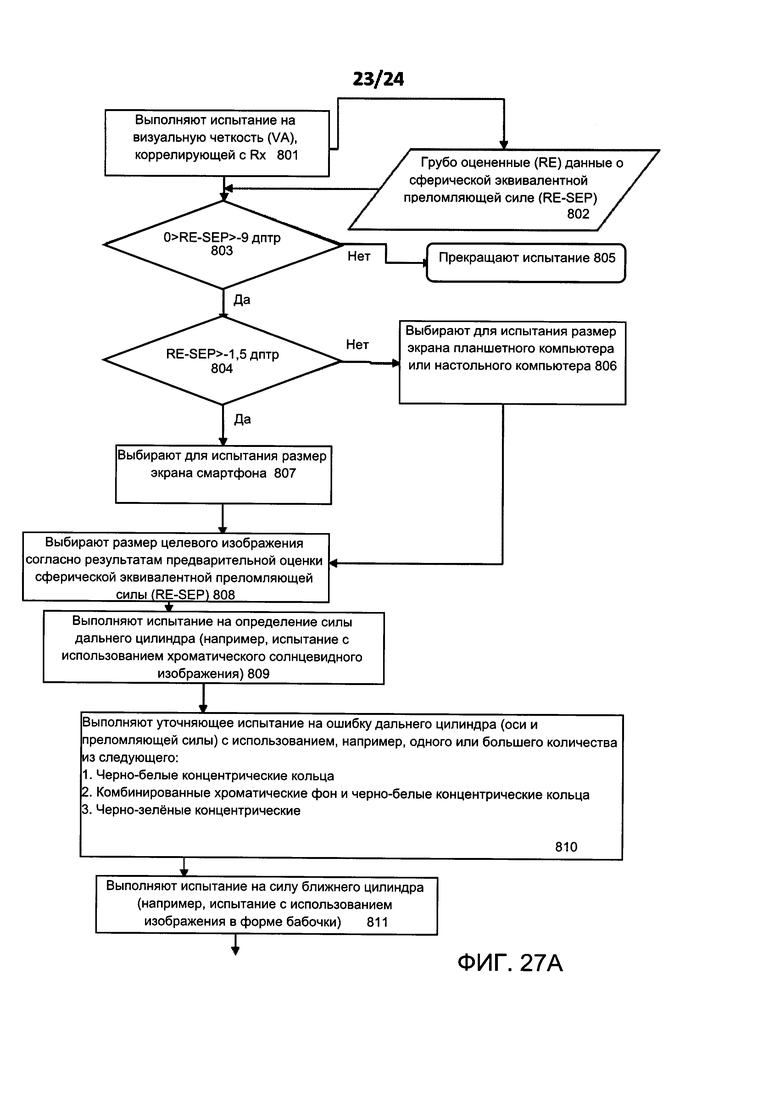
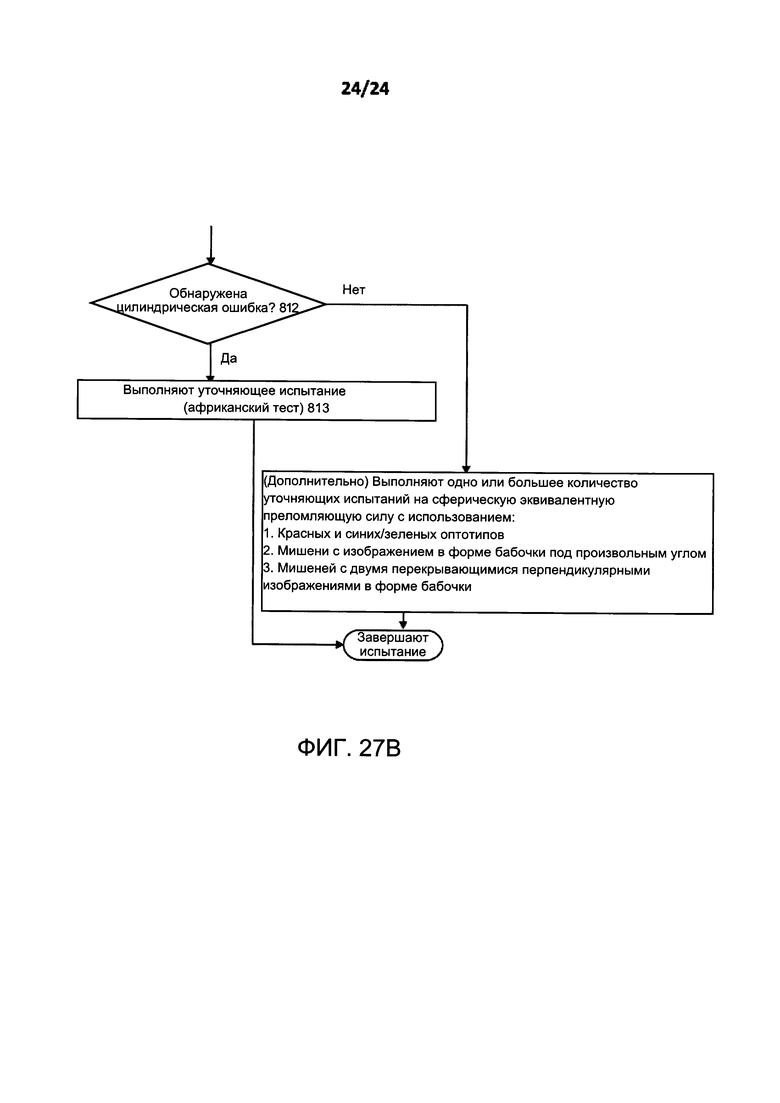
Группа изобретений относится к медицине, предпочтительно к офтальмологии, и может быть использована для измерения рефракционной ошибки глаза субъекта на основании субъективного измерения расстояния. Отображают по меньшей мере одно динамическое целевое изображение по меньшей мере одного знака в области отображения. Осуществляют прием субъективной обратной связи от субъекта, указывающей, что субъект расположен на максимальном расстоянии наилучшей четкости (MDBA) от целевого изображения. Причем максимальным расстоянием наилучшей четкости является максимальное расстояние, на котором субъект распознает знак. Измеряют одно или большее количество параметров, относящихся к расстоянию, в момент времени, когда субъект достиг максимального расстояния наилучшей четкости, с использованием по меньшей мере одного датчика. Оценивают максимальное расстояние наилучшей четкости путем оценки расстояния между глазом субъекта и областью отображения, на которой показано целевое изображение, с использованием данных датчика. Вычисляют рефракционную ошибку глаза на основании предполагаемого максимального расстояния наилучшей четкости и характеристик целевого изображения. Способ и система обеспечивают исследование рефракционной ошибки одного или большего количества типов: близорукость, дальнозоркость, пресбиопия и астигматизм; сохранение и/или вывод вычисленного по меньшей мере одного параметра, относящегося к рефракционной ошибке исследуемого глаза; коррекцию зрения для исправления преломляющей силы цилиндра и сферы за счет анализа и подбора MDBA, измерения грубо оцененной эквивалентной преломляющей силы сферы, угла астигматизма, преломляющей силы цилиндра и преломляющей силы сферы. 3 н. и 29 з.п. ф-лы, 27 ил.
1. Способ измерения рефракционной ошибки глаза субъекта, не требующий средства для рефракционной коррекции, включающий этапы, согласно которым:
a) отображают по меньшей мере одно выбранное динамическое или неподвижное целевое изображение в области отображения,
b) для каждого показанного целевого изображения принимают субъективную обратную связь от субъекта, указывающую, что субъект расположен на максимальном расстоянии наилучшей четкости (MDBA) от целевого изображения из множества расстояний, испытанных субъектом при рассматривании целевого изображения одним глазом, причем указанное максимальное расстояние наилучшей четкости является максимальным расстоянием, на котором субъект ясно распознает по меньшей мере один знак или визуальный эффект указанного целевого изображения,
c) получают данные, относящиеся к расстоянию между исследуемым глазом субъекта и целевым изображением, по меньшей мере когда субъект достиг максимального расстояния наилучшей четкости, с использованием по меньшей мере одного датчика,
d) оценивают максимальное расстояние наилучшей четкости согласно указанным полученным данным и
e) вычисляют по меньшей мере один параметр, относящийся к рефракционной ошибке исследуемого глаза на основании предполагаемого максимального расстояния наилучшей четкости и характеристик показанного по меньшей мере одного целевого изображения с использованием по меньшей мере одного процессора.
2. Способ по п. 1, согласно которому указанное получение данных включает захват по меньшей мере одного изображения лица субъекта, включая исследуемый глаз, и эталонную форму известных размеров посредством камеры, выводящей по меньшей мере один экземпляр графических данных, причем указанную оценку максимального расстояния наилучшей четкости выполняют путем анализа указанных графических данных с использованием предназначенного для этой цели программного приложения.
3. Способ по п. 2, согласно которому указанной эталонной формой является временная эталонная форма, взятая с элемента, размещенного поверх неисследуемого глаза.
4. Способ по п. 2, согласно которому указанной эталонной формой является постоянная эталонная форма, причем указанный способ дополнительно включает предварительный процесс калибрования абсолютных размеров указанной постоянной эталонной формы с использованием элемента с временной эталонной формой известных размеров.
5. Способ по любому из пп. 1-4, согласно которому различные целевые изображения используются для обследования рефракционной ошибки одного или большего количества типов из следующего списка: близорукость, дальнозоркость, пресбиопия и астигматизм, включая преломляющую силу цилиндра и ось цилиндра.
6. Способ по любому из пп. 1-4, согласно которому используют предназначенное для этой цели испытательное оптометрическое программное приложение, исполняемое посредством указанного по меньшей мере одного процессора персонального устройства, имеющего пользовательский интерфейс, выполненный с возможностью показа целевых изображений, ввода субъективной обратной связи и других входных данных, инструктирования субъекта и вывода результатов измерений.
7. Способ по любому из пп. 1-4, согласно которому каждое из указанного по меньшей мере одного целевого изображения выбрано из списка, содержащего: по меньшей мере одну однонаправленную мишень, по меньшей мере одну многонаправленную мишень, по меньшей мере одну всенаправленную мишень.
8. Способ по п. 7, согласно которому для многонаправленных и всенаправленных целевых изображений субъект снабжен инструментами пользовательского интерфейса, предоставляющими субъекту возможность маркировать по меньшей мере одну ось, указывающую визуальную четкость по меньшей мере одного визуального эффекта показанного целевого изображения для обеспечения субъективной обратной связи об этом, причем указанная маркировка используется для вычисления оси цилиндра исследуемого глаза, при этом указанная визуальная идентификация эффекта на конкретном расстоянии задает максимальное расстояние наилучшей четкости для данного субъекта.
9. Способ по п. 7, согласно которому для однонаправленного целевого изображения субъекту предлагают указать в качестве максимального расстояния наилучшей четкости максимальное расстояние, на котором ясно виден по меньшей мере один из знаков целевого изображения.
10. Способ по любому из пп. 1-4, 8, 9, дополнительно включающий сохранение и/или вывод вычисленного по меньшей мере одного параметра, относящегося к рефракционной ошибке исследуемого глаза.
11. Способ по любому из пп. 1-4, 8, 9, согласно которому указанное по меньшей мере одно целевое изображение содержит по меньшей мере одно из следующего списка: целевое изображение, состоящее из одиночного ряда знаков одного цвета, расположенных поверх заданного фона отличного цвета, причем максимальное расстояние наилучшей четкости при использовании данного целевого изображения задано как максимальное расстояние, на котором знаки распознаются субъектом;
целевое изображение, состоящее из двух рядов знаков, причем каждый ряд содержит знаки, и каждый ряд расположен поверх фона отличного цвета, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором знаки одного из рядов являются расплывчатыми и знаки другого ряда различаются субъектом;
целевое изображение в форме бабочки, повернутое на угол астигматизма субъекта согласно принятому углу астигматизма, выполненное из криволинейных полос, расположенных поверх фона, причем по меньшей мере некоторые из полос имеют первый цвет, по меньшей мере одна из полос имеет второй цвет, и фон имеет третий цвет, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере одна полоса второго цвета восстанавливает свой исходный цвет при фокусировании;
двойное цветовое целевое изображение концентрических колец или частей концентрических колец, повернутое на угол астигматизма субъекта согласно принятому углу астигматизма, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере изображение в форме бабочки из изображения в виде концентрических колец является отчетливо видимым;
цветное целевое изображение концентрических колец, содержащее кольца по меньшей мере одного цвета и фон отличного цвета, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере изображение в форме бабочки из изображения в виде концентрических колец является отчетливо видимым по меньшей мере с одной полосой второго цвета, которая не изменила свой цвет;
хроматическое целевое изображение солнцевидной формы, выполненное из множества полосчатых элементов, причем каждый элемент содержит по меньшей мере одну наружную полосу одного цвета и среднюю полосу другого цвета, при этом указанные элементы радиально расположены таким образом, что формируют радиально симметричную подобную солнцу форму, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере некоторые из элементов зрительно отчетливо видны без изменения второго цвета; целевое изображение с комбинированным хроматическим изображением солнцевидной формы и изображением концентрических колец, причем указанное изображение концентрических колец расположено в центре хроматического изображения колец с возможностью совместного использования той же самой радиальной оси симметрии, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором зрительно отчетливо видны по меньшей мере некоторые из элементов хроматического солнцевидного изображения, и по меньшей мере изображение в форме бабочки из изображения в виде концентрических колец является видимым без изменения второго цвета хроматического солнцевидного изображения; и/или
целевое изображение с уникальным рисунком, на котором основным элементом является эллиптическая наклонная форма, скопированная построчно и поколонно с одновременным чередованием ее цвета в каждом направлении, причем по меньшей мере одна темная линия загораживает полностью или частично по меньшей мере одну часть ряда рисунка или по меньшей мере одну область нарушения основной периодической структуры.
12. Способ по любому из пп. 1-4, 8, 9, согласно которому указанную рефракционную ошибку измеряют посредством:
a) измерения грубо оцененной (RE) эквивалентной преломляющей силы сферы или преломляющей силы цилиндра и преломляющей силы сферы; и/или
b) измерения оси цилиндра.
13. Способ по п. 12, дополнительно использующий процесс коррекции для исправления преломляющей силы сферы и цилиндра, включающий этапы, согласно которым:
a) принимают угол астигматизма, преломляющую силу цилиндра и преломляющую силу сферы или грубо оцененную (RE) эквивалентную преломляющую силу сферы, полученные из предыдущего обследования субъекта,
b) отображают целевое изображение с уникальным рисунком в области отображения, повернутое на угол астигматизма субъекта согласно принятому углу астигматизма, причем указанное целевое изображение с уникальным рисунком показывают в области отображения по меньшей мере в двух размерах, при этом каждый размер вычислен на основании принятой преломляющей силы цилиндра и преломляющей силы сферы или грубо оцененной (RE) эквивалентной преломляющей силы сферы,
c) для каждого размера показанного целевого изображения с уникальным рисунком предлагают субъекту подбирать расстояние до целевого изображения до распознавания заданного визуального эффекта и принимают отзыв от субъекта при достижении расстояния, на котором распознается визуальный эффект,
d) для каждого размера показанного целевого изображения с уникальным рисунком измеряют расстояние между целевым изображением с уникальным рисунком и исследуемым глазом субъекта и
e) повторно вычисляют преломляющую силу цилиндра и преломляющую силу сферы на основании измеренных расстояний.
14. Система для измерения рефракционной ошибки глаза субъекта, не требующая средства для рефракционной коррекции, содержащая:
a) по меньшей мере одно отображающее устройство, задающее область отображения для показа на ней целевых изображений;
b) по меньшей мере один датчик для распознавания по меньшей мере одного измеряемого параметра повторяющимся способом, причем указанный параметр обеспечивает возможность прямого или косвенного измерения расстояния между субъектом и областью отображения; и
с) по меньшей мере один процессор, содержащий предназначенное для этой цели приложение, исполняемое им, и выполненный с возможностью:
приема данных от указанного датчика в режиме реального времени;
приема субъективной обратной связи от субъекта посредством пользовательского интерфейса указанного приложения, причем указанная обратная связь включает свидетельство того, что субъект расположен на максимальном расстоянии наилучшей четкости (MDBA) от целевого изображения из множества расстояний, проверенных субъектом, при рассматривании целевого изображения одним глазом субъекта, при этом указанное максимальное расстояние наилучшей четкости является максимальным расстоянием, на котором субъект отчетливо распознает по меньшей мере один знак или визуальный эффект указанного целевого изображения;
оценки максимального расстояния наилучшей четкости путем оценки расстояния между глазом субъекта и областью отображения, на которой показано целевое изображение, с использованием данных, полученных от датчика; и
вычисления по меньшей мере одного параметра, относящегося к рефракционной ошибке исследуемого глаза, на основании предполагаемого максимального расстояния наилучшей четкости и характеристик показанного целевого изображения.
15. Система по п. 14, в которой указанное предназначенное для этой цели приложение действует посредством персонального устройства, содержащего процессор и отображающее устройство, причем указанный по меньшей мере один датчик связан с указанным персональным устройством и управляется указанным персональным устройством.
16. Система по п. 14, в которой указанное предназначенное для данной цели приложение действует посредством персонального устройства, содержащего процессор, по меньшей мере один датчик и отображающее устройство.
17. Система по любому из пп. 14-16, в которой указанный по меньшей мере один датчик содержит фотокамеру или видеокамеру, управляемую указанным программным приложением и выполненную с возможностью захвата по меньшей мере одного изображения лица субъекта, включая исследуемый глаз, и эталонной формы известных размеров, причем указанную оценку максимального расстояния наилучшей четкости выполняют путем анализа указанных графических данных с использованием предназначенного для этой цели программного приложения.
18. Система по п. 17, в которой указанной эталонной формой является временная эталонная форма, захваченная с элемента, размещенного поверх неисследуемого глаза.
19. Система по п. 17, в которой указанной эталонной формой является постоянная эталонная форма, причем указанный способ дополнительно включает предварительный процесс калибрования абсолютных размеров указанной постоянной эталонной формы с использованием элемента с временной эталонной формой известных размеров.
20. Система по любому из пп. 14-16, 18, 19, в которой различные целевые изображения используются для обследования рефракционной ошибки одного или большего количества типов из следующего списка: близорукость, дальнозоркость, пресбиопия и астигматизм, включая преломляющую силу цилиндра и ось цилиндра.
21. Система по любому из пп. 14-16, 18, 19, в которой каждое из указанного по меньшей мере одного целевого изображения выбрано из списка, содержащего: по меньшей мере одну однонаправленную мишень, по меньшей мере одну многонаправленную мишень, по меньшей мере одну всенаправленную мишень.
22. Система по п. 21, в которой для многонаправленных и всенаправленных целевых изображений субъект снабжен инструментами пользовательского интерфейса, предоставляющими субъекту возможность маркировать по меньшей мере одну ось, указывающую визуальную четкость по меньшей мере одного визуального эффекта показанного целевого изображения для обеспечения субъективной обратной связи об этом, причем указанная маркировка используется для вычисления оси цилиндра исследуемого глаза, при этом указанная визуальная идентификация эффекта на конкретном расстоянии задает максимальное расстояние наилучшей четкости для данного субъекта исследования.
23. Система по п. 21, в которой для однонаправленного целевого изображения субъекту предлагают указать в качестве максимального расстояния наилучшей четкости максимальное расстояние, на котором ясно виден по меньшей мере один из знаков целевого изображения.
24. Система по любому из пп. 14-16, 18, 19, 22, 23, дополнительно содержащая запоминающее устройство для сохранения вычисленного по меньшей мере одного параметра, относящегося к рефракционной ошибке исследуемого глаза.
25. Способ измерения рефракционной ошибки глаза субъекта, не требующий средства для рефракционной коррекции, включающий этапы, согласно которым:
a) выполняют предварительное испытание для грубой оценки визуальной четкости каждого исследуемого глаза субъекта,
b) выполняют испытание на ошибку дальнего цилиндра с использованием по меньшей мере одного целевого изображения, имеющего многонаправленную или всенаправленную симметрию, для обнаружения оси цилиндра и
c) выполняют испытание на ошибку дальнего и ближнего цилиндров с использованием по меньшей мере одного целевого изображения, имеющего однонаправленную или многонаправленную или всенаправленную симметрию, для обнаружения преломляющей силы цилиндра, причем каждое из указанных испытаний включает этапы, согласно которым:
(i) отображают по меньшей мере одно выбранное динамическое или неподвижное целевое изображение в области отображения,
(ii) для каждого показанного целевого изображения принимают субъективную обратную связь от субъекта, указывающую, что субъект расположен на максимальном расстоянии наилучшей четкости (MDBA) от целевого изображения из множества расстояний, испытанных субъектом при рассматривании целевого изображения одним его глазом, причем указанное максимальное расстояние наилучшей четкости является максимальным расстоянием, на котором субъект ясно распознает по меньшей мере один знак или визуальный эффект указанного целевого изображения,
(iii) получают данные, относящиеся к расстоянию между исследуемым глазом субъекта и целевым изображением, по меньшей мере когда субъект достиг максимального расстояния наилучшей четкости, с использованием по меньшей мере одного датчика,
(iv) оценивают максимальное расстояние наилучшей четкости согласно указанным полученным данным и
(v) вычисляют по меньшей мере один параметр, относящийся к рефракционной ошибке исследуемого глаза, на основании предполагаемого максимального расстояния наилучшей четкости и характеристик показанного по меньшей мере одного целевого изображения с использованием по меньшей мере одного процессора.
26. Способ по п. 25, согласно которому указанное предварительное испытание сконфигурировано с возможностью грубого измерения эквивалентной преломляющей силы сферы (SEP) исследуемого глаза.
27. Способ по любому из пп. 25, 26, согласно которому указанное испытание на ошибку дальнего цилиндра выполняют путем использования хроматического солнцевидного целевого изображения, выполненного из множества полосчатых элементов, причем каждый элемент содержит по меньшей мере одну наружную полосу одного цвета и среднюю полосу другого цвета, при этом указанные элементы радиально расположены таким образом, что формируют радиально симметричную подобную солнцу форму, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере некоторые из элементов зрительно отчетливо видны без изменения исходного цвета,
причем для многонаправленных и всенаправленных целевых изображений субъект снабжен инструментами пользовательского интерфейса, предоставляющими субъекту возможность маркировать по меньшей мере одну ось, указывающую визуальную четкость по меньшей мере одного визуального эффекта показанного целевого изображения для обеспечения субъективной обратной связи об этом, причем указанная маркировка используется для вычисления оси цилиндра исследуемого глаза, при этом указанная визуальная идентификация эффекта на конкретном расстоянии задает максимальное расстояние наилучшей четкости для данного субъекта.
28. Способ по п. 25 или 26, согласно которому указанное испытание на ошибку ближнего цилиндра выполняют путем использования сформированного целевого изображения в форме бабочки, выполненного из криволинейных полос, расположенных поверх фона, причем по меньшей мере некоторые из полос имеют первый цвет, по меньшей мере одна из полос имеет второй цвет, и фон имеет третий цвет, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере одна полоса второго цвета отчетливо видна без изменения ее цвета.
29. Способ по любому из пп. 25 или 26, дополнительно включающий по меньшей мере одно из:
a) по меньшей мере одного уточняющего испытания на уточнение измерений указанной ошибки дальнего цилиндра;
b) по меньшей мере одного уточняющего испытания на уточнение измерений указанной ошибки ближнего цилиндра; и
c) по меньшей мере одного уточняющего испытания на уточнение измерений указанной оси ближнего цилиндра.
30. Способ по п. 29, согласно которому указанное уточняющее испытание для измерения ошибки дальнего цилиндра выполняют с использованием по меньшей мере одного из следующих целевых изображений:
целевое изображение, состоящее из одиночного ряда знаков одного цвета, расположенных поверх заданного фона отличного цвета, причем максимальное расстояние наилучшей четкости при использовании данного целевого изображения задано как максимальное расстояние, на котором знаки распознаются субъектом;
целевое изображение, состоящее из двух рядов знаков, причем каждый ряд содержит знаки, и каждый ряд расположен поверх фона отличного цвета, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором знаки одного из рядов являются расплывчатыми и знаки другого ряда различаются субъектом;
целевое изображение в форме бабочки, выполненное из криволинейных полос, расположенных поверх фона, повернутое на угол астигматизма субъекта согласно принятому углу астигматизма, причем по меньшей мере некоторые из полос имеют первый цвет, по меньшей мере одна из полос имеет второй цвет, и фон имеет третий цвет, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере одна полоса второго цвета восстанавливает свой исходный цвет при фокусировании;
двойное цветовое целевое изображение концентрических колец или частей концентрических колец, повернутое на угол астигматизма субъекта согласно принятому углу астигматизма, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере изображение в форме бабочки из изображения в виде концентрических колец является отчетливо видимым;
цветное целевое изображение концентрических колец, содержащее кольца по меньшей мере одного цвета и фон отличного цвета, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере изображение в форме бабочки из изображения в виде концентрических колец является отчетливо видимым по меньшей мере с одной полосой второго цвета, которая не изменила свой цвет;
хроматическое целевое изображение солнцевидной формы, выполненное из множества полосчатых элементов, причем каждый элемент содержит по меньшей мере одну наружную полосу одного цвета и среднюю полосу другого цвета, при этом указанные элементы радиально расположены таким образом, что формируют радиально симметричную подобную солнцу форму, причем максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором по меньшей мере некоторые из элементов зрительно отчетливо видны без изменения второго цвета;
целевое изображение с комбинированным хроматическим изображением солнцевидной формы и изображением концентрических колец, причем указанное изображение концентрических колец расположено в центре хроматического изображения колец с возможностью совместного использования той же самой радиальной оси симметрии, при этом максимальное расстояние наилучшей четкости при использовании этого целевого изображения задано как максимальное расстояние, на котором зрительно отчетливо видны по меньшей мере некоторые из элементов хроматического солнцевидного изображения, и по меньшей мере изображение в форме бабочки из изображения в виде концентрических колец является видимым без изменения второго цвета хроматического солнцевидного изображения; и/или
целевое изображение с уникальным рисунком, на котором основным элементом является эллиптическая наклонная форма, скопированная построчно и поколонно с одновременным чередованием ее цвета в каждом направлении, причем по меньшей мере одна темная линия загораживает полностью или частично по меньшей мере одну часть ряда рисунка или по меньшей мере одну область нарушения основной периодической структуры.
31. Способ по любому из пп. 25, 26 или 30, дополнительно использующий корректирующий процесс для коррекции преломляющей силы цилиндра и сферы, включающий этапы, согласно которым:
a) принимают угол астигматизма, преломляющую силу цилиндра и преломляющую силу сферы, полученные из предыдущего обследования данного субъекта,
b) отображают целевое изображение с уникальным рисунком в области отображения, повернутое на угол астигматизма субъекта согласно принятому углу астигматизма, причем указанное целевое изображение с уникальным рисунком показывают в области отображения по меньшей мере в двух размерах, при этом каждый размер вычислен на основании принятой преломляющей силы цилиндра и преломляющей силы сферы,
c) для каждого размера показанного целевого изображения с уникальным рисунком предлагают субъекту подбирать расстояние до целевого изображения до распознавания заданного визуального эффекта и принимают обратную связь от субъекта при достижении расстояния, на котором распознается визуальный эффект;
d) для каждого размера показанного целевого изображения с уникальным рисунком измеряют расстояние между целевым изображением с уникальным рисунком и исследуемым глазом субъекта, и
e) повторно вычисляют преломляющую силу цилиндра и преломляющую силу сферы на основании измеренных расстояний.
32. Способ по п. 1, согласно которому датчиком является по меньшей мере один из датчика близости, датчика акселерометра, камеры или объемного (3D) датчика.
| WO 2011017329 A1 10.02.2011 | |||
| СПОСОБ ЛЕЧЕНИЯ АНОМАЛИЙ РЕФРАКЦИИ ВОЗДЕЙСТВИЕМ УЛЬТРАФИОЛЕТОВОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2419402C2 |
| УСТРОЙСТВО ДЛЯ СКРИНИНГОВОЙ ДИАГНОСТИКИ ЗРЕНИЯ | 2001 |
|
RU2210972C1 |
| US 2012068998 A1 22.03.2012 | |||
| US 5668743 A 16.09.1997 | |||
| WO 2006029048 A2 16.03.2006 | |||
| US 2012212706 A1 23.08.2012 | |||
| US 5877841 A 02.03.1999 | |||
| WO 2004012591 A1 12.02.2004 | |||
| Хирургический аппарат для перепиливания костей | 1926 |
|
SU4409A1 |

