Изобретение относится к средствам, предназначенным для управления работой устройствами нанесения промышленной маркировки в форме графических, цифробуквенных символов, рисунков или специальных машиночитаемых кодов, например коды DataMatrix или QRCode или MaxiCode, с поддержкой интерфейса пользователя и обратной связью в реальном времени, в которых посредством прецизионных приводных механизмов позиционирования исполнительно узла, производиться регулируемое дискретное соответствующие воздействие на маркируемый материал по заданной траектории в нужный момент.
Системы промышленной маркировки имеют прецизионные механизмы позиционирования исполнительного узла, и исполнительный узел, который маркирует: или ударным пуансоном в ударно-точечных устройствах; или алмазной иглой вдавливания в устройствах символьного прочерчивания; или распылительным соплом в адгезивых каплеструйных красящих устройствах; или оптической фокусировкой световых потоков излучателя в лазерных устройствах. Прецизионные приводные механизмы изготавливаются из дискретных приводов, перемещаемых мощными гибридными синхронными шаговыми двигателями. Существующая конструкция управления такими позиционирующими механизмами организованна по принципу единого центрального специализированного блока управления, который схемотехнически (аппаратно) и алгоритмически (программно) контролирует все логические и аппаратные уровни, включая: интерфейс(ы) пользователя; обработку общих параметров маркировки; отслеживание текущего местоположения исполнительного узла; вычисление нового местоположения части формы маркируемого символа и т.д., и в итоге формируя дискретные импульсные сигналы шаговым двигателям, согласно исполняемого алгоритма, а также команды/сигналы исполнительному механизму маркиратора. Данная конструкция управления имеет два типа исполнения (примеры описаны в патентах US 6135022 A, US 6435742 B1, US 4506999, CN 204622836):
Тип 1. Обобщенный, где главный контроллер имеет в своем составе схемы формирования дискретных импульсных сигналов обмоток шаговых двигателей соответствующих осей приводов механизма исполнительного узла и дополнительные электронные устройства сопряжения. Главный контроллер данного типа, может состоять из нескольких контроллеров аппаратно взаимодействующих на основе электрических сигналов уровней ТТЛ или КМОП в пределах одной электронной платы или единого устройства. В качестве главного контроллера исполнения типа 1, может использоваться специализированное ЭВМ, которое конструкционно оснащено дополнительными электронными устройствами сопряжения. При этом, все логические алгоритмические уровни вычислений в рамках функций управления и формирования итоговых дискретных сигналов выполняются только главным контроллером, без обратных связей.
Тип 2. Разделенный, где главный контроллер не имеет схем формирования дискретных импульсных сигналов для обмоток шаговых двигателей приводов механизма исполнительного узла и дополнительные электронные устройства сопряжения. Сигналы шаговых двигателей формируются аппаратно в отдельно выделенных устройствах - драйверах шаговых двигателей, содержащих дополнительные электронные устройства сопряжения. Привода маркиратора с шаговым двигателем управляются главным контроллером посредством стека протоколов дискретных сигналов STEP-DIR или CW/CCW. При этом привода маркиратора с шаговым двигателем не осуществляют никаких логических функций управления, а являются только электронными устройствами формирования последовательности дискретных импульсов нужного уровня, мощности и последовательности, в соответствии с тактирующим сигналом получаемым от главного контроллера. Главный контроллер типа 2, тоже может состоять из нескольких контроллеров, аппаратно взаимодействующих на основе электрических сигналов уровней ТТЛ или КМОП, в пределах одной электронной платы или единого устройства, с электронными схемами/устройствами формирования сигналов протоколов STEP-DIR или CW/CCW. В качестве главного контроллера типа 2, тоже может использоваться специализированная многопроцессорная ЭВМ, конструкционно управляющая отдельными электронными устройствами формирования сигналов протоколов STEP-DIR или CW/CCW, через, как параллельный LPT, последовательный СОМ, так и порты универсальной последовательной шины USB. При этом, все логические алгоритмические уровни вычислений в рамках функций управления и формирования итоговых дискретных сигналов выполняются тоже только главным контроллером, и тоже без обратных связей.
Как в исполнении типа 1, так и в исполнении типа 2, главный контроллер всегда, не только вычисляет текущее местоположение ударного узла маркиратора, но и осуществляет всю логическую обработку общего задания на выполняемую маркировку. Общее задание на маркировку включает вычисления: взаимного расположения маркируемых символов; скорости перемещения исполнительного узла; моменты ускорения, замедления в процессе движения; траектории движения в зависимости от форм маркируемого символа; разрешение нанесения дискретных элементов символа; количество и качество срабатываний исполнительного узла в определенных местах траектории маркируемого символа, и т.д. Данная логическая обработка имеет сложный взаимосвязанный многозадачный уровень программных вычислений, и их реализация полностью зависит от аппаратной реализации главного контроллера, что невозможно с применением только одной ЭВМ. Итогом такой программной обработки, являются данные, на основе которых формируются импульсные токовые сигналы на перемещение в соответствующую позицию и включение исполнительного узла маркиратора.
Недостатками исполнения типа 1 и 2, является серьезная ограниченность в возможности переконфигурирования маркирующего оборудования, изменении алгоритмов его работы. Любое изменение формы маркируемого символа вызывает модернизацию базовых программ и алгоритмов работы отдельных вычислительных схем главного контроллера, в виду сильной зависимости от аппаратной реализации. Возникает необходимость детального аппаратно-программного тестирования с поверкой на точность исполнения, а в отдельных случаях требуется переделка аппаратной реализации контроллеров, или целиком, или частично.
К тому же, применение исполнений типа 1 и 2 вносит сильные ограничения в быстродействие работы маркирующей системы, так как в этом случае ограничена производительность главного контроллера, в виду явной перегруженности процессора(ов) одновременным исполнением множества задач различных логических уровней вычислений, особенно, это выражается, когда управление ведется более, чем в двух приводных осях привода маркиратора (X, Y, R и Z), где нужно вычислять текущее и будущее местоположение всех осей одновременно. Возможным решением проблемы быстродействия многозадачности при маркировке символов, является применение сверхскоростных плат и процессоров, использование нескольких процессоров на одной плате, что неэффективно удорожает стоимость оборудования, увеличивает аппаратные габариты и энергопотребление, вносит проблемы синхронизации и теплоотведения, в итоге не решая общего комплекса имеющихся проблем.
К тому же, применение исполнений типа 1 и 2 не позволяет реализовать схему, где один главный контроллер, может управлять работой несколькими маркираторами работающими одновременно автономно независимо друг от друга. В этом случае многозадачность вычислений увеличится на соответствующее независимым управляемым маркираторам количество раз.
К тому же, исполнение типа 1 и 2 не позволяет реализовать схему управления с обратной связью. Фактически нет прямого подтверждения правильности выполнения действий исполнительным узлом при достижении им нужной позиции местоположения. Нет возможности реализовать функции текущего встроенного контроля работоспособности отдельных компонентов маркирующей системы. Реализуется только косвенный программный алгоритмический контроль, который никак не связан с аппаратной частью механизмов маркиратора и сильно ограничен.
К тому же, если требуется максимальная компактность маркиратора (например, для ручного портативного исполнения), исполнение типа 1 и 2, ограничивает возможности объединения схемы формирования дискретных импульсных сигналов управления обмотками мощных шаговых двигателей приводных механизмов позиционирования ударного узла в одной конструкции с приводом. Компактность исполнения маркиратора, также зависит от возможной компактности главного центрального контроллера, поэтому часто маркиратор и его главный контроллер выполняется раздельно. В этом случае, маркиратор включает в себя только приводы осей, шаговые двигатели и механизм исполнительного узла, а главный контроллер с устройством управления шаговым двигателем управляет, через кабели, где сигналы передаются на значительном удалении (удаленность от 1,5 до 5 метров), что заставляет формировать увеличенный по токовым показателям импульсный сигнал, с учетом потерь тока в управляющем кабеле, а значит, использовать дорогостоящий многожильный кабель достаточного сечения проводников. В этой связи устройство управления приводом маркиратора с шаговым двигателем имеет значительные габариты, обусловленные размерами силовых элементов усилителей тока, и их системы охлаждения.
К тому же, кабели гибридных шаговых двигателей могут иметь или 4, или 6 выводов обмоток, которые необходимо подключить индивидуально для каждого двигателя. Учитывая количество необходимых для работы маркиратора приводов (возможно до 4-х, это X, Y, R и Z), общее количество проводников в общем кабеле управления маркиратора, может меняться от 8 до 24, что порождает дополнительные элементы в конструкции маркиратора, которые обеспечивают прокладку и защиту длинных кабельных проводников, увеличивая общие габариты и массу. Дополнительно требуются проводники для передачи сигналов управления исполнительному механизму маркиратора, что также увеличивает их общее количество в зависимости от типа механизма.
К тому же, еще одной проблемой удаленного управления шаговыми двигателями, является невозможность снижать токовую нагрузку обмоток шаговых двигателей во время их вынужденного простоя, так как невозможно без значительной временной задержки, обусловленной переходными процессами в длинном кабельном соединении, переключить шаговый двигатель в нормально активный рабочей режим. Любое изменение рабочего тока на обмотках удаленного шагового двигателя сказывается на производительности маркиратора, что актуально в промышленных масштабах маркировки
К тому же, постоянная токовая нагрузка обмоток удаленных шаговых двигателей негативно сказывается на их эксплуатационной надежности с преждевременным выходом из строя, как самих обмоток шагового двигателя, так и выходных каскадов усилителей тока драйвера шагового двигателя. Это же является причиной чрезмерного потребления электроэнергии, что особенно актуально, если маркиратор должен иметь автономное мобильное исполнение и работать от аккумулятора или ограниченного по ресурсу тока источника. Чрезмерная нагруженность обмоток порождает проблему теплоотвода.
К тому же, эксплуатация маркираторов на базе исполнения типа 1 и 2, ставит общую конструкцию в жесткую зависимость от работы главного контроллера, любая поломка блока управления не позволяет использовать маркирующую систему каким-либо образом. Выход из строя любого компонента единого центрального управляющего блока приводит к полной неработоспособности всей установки. Тем самым, исполнение тип 1 и тип 2 имеет очень низкую эксплуатационную ремонтопригодность.
Задача, поставленная перед настоящим изобретением, заключается в создании экономически и энергетически выгодной, достаточно быстродействующей и надежной системы управления за перемещением исполнительных узлов непродолжительного воздействия дискретного характера на материал, с активацией их механизмов и поддержкой интерфейсов пользователя в промышленных системах маркировки, таких как, ударно-точечных, осуществляющих циклическое регулируемое вдавливание ударного пуансона/алмазной иглы по траектории маркируемого символа, или красящих каплеструйных, осуществляющих распыление нужного количества краски по траектории маркируемого символа, или лазерных, осуществляющих регулируемое термическое точечное окисление поверхности материала лазерным лучом по траектории маркируемого символа.
Настоящая задача решается тем, что управление согласно изобретению организуется по универсально-распределенной гибридной системе управления приводными механизмами и исполнительным узлом, имеющей два независимых автономных логических уровня, разделяющих процессы вычислений и программной обработки, на общие, для всех компонентов одного маркиратора или группы маркираторов, и частные, специализированно индивидуальные, присущие только одному приводу или механизму в одном отдельно взятом маркираторе, где аппаратное исполнение каждого вычислительного устройства достаточно упрощенное и компактное (размеры NEMA 11 или NEMA 17) в рамках производительности функций исполняемых независимых процессов, и располагаемое в непосредственной близости с управляемым шаговым двигателем, и включающее устройства управления обмотками шагового двигателя, интерфейсной связи, блок оценки работоспособности и электрические схемы сопряжения с датчиками и активации управляемых выходов исполнительных узлов маркираторов. Аппаратно-программная реализация осуществляет логическое разделение процессов по двум уровням следующим образом:
Логический уровень 1 осуществляет частные процессы: обработки и анализа текущей позиции шагового двигателя привода; интеллектуальную регулировку параметров скорости вращения с динамическим изменением, содержащим фазы ускорения и замедления; динамического переключения разрешения шагов перемещения шагового двигателя; дискретной регулируемой обработки сигналов обратной связи от различных датчиков, типа энкодер, оптический лазерный сенсор, сухой контакт или аналоговый уровень; регулировать активацию выходных сигналов типа ТТЛ или КМОП, а также любой программный комплекс последовательности процессов логического уровня 1, постоянно поддерживая интерфейс с логическим уровнем 2;
Логический уровень 2 осуществляет общие процессы: обработки и анализ общих последовательностей задач выполнения маркировки для каждого маркиратора; вычисления предельных параметров скоростей нанесения символов; вычисления взаимного расположения маркируемых символов в рабочем поле одной задачи; оценки структуры графических форм маркируемых символов и построения их траекторий, тем самым формируя предельно-граничные параметры функционирования логического уровня 1, постоянно поддерживая, как интерфейс с логическим уровнем 1, так и с пользователем маркиратора и внешней системой хост управления, по общеизвестным или специализированным протоколам.
Технический результат заключается в том, что работа множества контроллеров/процессоров двух разных уровней логической обработки на основе универсально-распределенной гибридной системы управления, позволяет осуществлять автономную независимую индивидуальную работу, как прецизионных приводных механизмов позиционирования одного исполнительного узла, так и активации их множества, в форме нескольких однотипных или гибридных промышленных маркираторов, в соответствии с алгоритмами предустановленных программам вычислительных устройств логического уровня 1, разгружая ресурсы вычислительного устройства логического уровня 2, обеспечивая ему возможность обработки сложных задач общего назначения и интерфейсов пользователя, с возможностью модернизации отдельных алгоритмов, распараллеливая одновременно выполняемые процессы управления и исполнения множества отдельных задач, посредством их разбиения на процессы соответствующего логического уровня с обратной связью.
При этом, вычислительные устройства логического уровня 1 выполняются максимально компактными, с физически распределенным размещением непосредственно на шаговых двигателях соответствующего привода маркиратора стандарта моторных опор NEMA 11 или NEMA 17 или в непосредственной близости от него, и конструктивно содержащие схемы формирования дискретных импульсных сигналов обмоток шаговых двигателей, тем самым полностью исключая передачу высокотоковых сигналов на значительные расстояния. Уровень передаваемого импульсного токового сигнала обмоток шагового двигателя определяется оптимально необходимым удерживающим моментов шагового двигателя.
При этом, взаимодействие между распределенными вычислительными устройствами логических уровней 1 и 2 осуществляется по адресным интерфейсам на основе двухпроводных шин: RS-485, CAN, TWI, I2C, ProfiBus.
При этом, взаимодействие логического уровня 1 с логическим уровнем 2 осуществляется по схеме ведущий-ведомый с полной автономностью выполнения основных логических функций собственного уровня, с реакцией ведомого не превышающей интервал 1 мсек.
При этом, обратная связь между логическими уровнями реализуется на основе аппаратных прерываний вычислительного устройства соответствующего уровня, принудительно прекращающих исполнение любой текущей задачи, до момента приема сообщения от другого логического уровня, после приема такого сообщения, исполнение незавершенной задачи возобновляется с прерванного места.
При этом, каждый привод маркиратора работает индивидуально автономно на логическом уровне 1, никак не связанно, ни программно, ни аппаратно с любым другом приводом. Все распределенные логические устройства логического уровня 1, подключены к общей двухпроводной шине, получая базовые исходные данные от устройств логического уровня 2.
При этом, схема формирования дискретных импульсных сигналов управления шаговым двигателем конкретного привода маркиратора, расположена совместно с вычислительным устройством логического уровня 1, образуя гибридное устройство управления, исключающее временные потери и большие переходные процессы в цепях длинных проводников, с возможностью программно снижать нагрузку на обмотках шагового двигателя в моменты холостого вынужденного простоя привода, экономя электроэнергию и не перегружая электрические цепи и обмотки, увеличивая надежность конструкции маркиратора.
При этом, сигналы активации исполнительного узла/ов маркиратора, активируют его механизмы как посредством прямого подключения к выходам управляющего устройства логического уровня 1, так и через соответствующий мультиплексор или реле, коммутирующие нужные рабочие напряжения на нужное количество исполнительных узлов.
При этом, применение интерфейсов с двухпроводными шинами, снижает количество проводов в кабеле управления гибридными шаговыми двигателями до 2-х, облегчая габариты и конструкцию маркиратора с возможностью их более удобной скрытой защищенной прокладки и экономии на проводниках.
При этом, система электроснабжения множества гибридных устройств управления приводов маркиратора реализуется на основе электрических цепей постоянного напряжения от 12 до 40 Вольт, по двухпроводной схеме от централизованного единого источника или раздельно от локальных источников, не имеющих между собой гальванической связи, по необходимости, таким образом общее количество используемых проводников для работы каждого отдельного привода маркиратора не превышает 4-х проводов (2-ва, шины интерфейса связи, и 2-ва, электропитания), к которым можно подключаться параллельно.
При этом, применение интерфейсов передачи данных с двухпроводными шинами, позволяет удалить при необходимости устройства логических уровней 1 и 2 друг от друга (зависит от используемого интерфейса, для CAN до 1 км), без потери функциональности и проблем передачи тока большой величины на значительные расстояния.
При этом, возможно применять различные шлюзы-конвертеры, как проводных интерфейсов, или USB в CAN, или USB в RS-485, или USB в ProfiBus, или Ethernet в CAN, или Ethernet в RS-485, или Ethernet в ProfiBus, так и беспроводных, или Wi-Fi в CAN, или Wi-Fi в RS-485, или Wi-Fi в ProfiBus, или Bluetooth в CAN, или Bluetooth в RS-485, или Bluetooth в ProfiBus, или ZigBee в CAN, или ZigBee в RS-485, или ZigBee в ProfiBus, или WirelessUSB в CAN, или WirelessUSB в RS-485, или WirelessUSB в ProfiBus, или HomeRF в CAN, или HomeRF в RS-485, или HomeRF в ProfiBus, для использования в качестве устройства управления логического уровня 2 различных устройств с числовым программным управлением любых сторонних производителей, обеспечивающих нужную производительность и функциональность.
При этом, применение одновременно работающих устройств управления логического уровня 1 ограниченно количеством применяемых шлюзов-конвертеров, и количеством адресов адресного пространства, задействованного интерфейса двухпроводной шины связи логических уровней, поддерживаемых каждым шлюзом-конвертером.
При этом, с учетом применения шлюзов-конвертеров интерфейсов, как внутри конструкции маркиратора, так и как внешнего аксессуарного устройства, возможно использовать любые персональные компьютеры, или ноутбуки, или нетбуки, или неттопы, или планшеты, или мобильные смартфоны, работающие под управлением, или ОС Windows, или ОС Linux, или ОС Unix, или ОС Android, или ОС MAC OS, или ОС iOS, что позволяет легко конфигурировать конструкцию маркиратора в нужных технологических условиях, и поддерживать его функционирование в случае выхода управляющего устройства логического уровня 2, за счет его замены, с переустановкой соответствующих программных драйверов и пользовательского программного обеспечения логического уровня 2.
На фиг. 1 показана общая логическая архитектура построения универсально-распределенной гибридной системы управления маркиратором, где 1 - логический уровень 1, 2 - устройство управления соответствующей оси маркиратора, 3 - блок активации исполнительного механизма маркиратора, 4 - блок расчета и настройки координат соответствующей оси привода, 5 - блок расчета и настройки параметров скорости, фаз замедления и ускорения, 6 - блок формирования дискретных импульсных сигналов шагового двигателя, 7 - блок оценки работоспособности узлов привода, 8 - двухпроводная шина интерфейса связи логический уровней, 9 - логический уровень 2, 10 - блок интерфейсов пользователя, 11 - блок расчета формы маркируемого символа, 12 - блок расчета расположения символов в соответствующих осях маркиратора, 13 - блок расчета разрешения символа, 14 - блок оценки работоспособности маркиратора(ов) и качества выполнения текущего задания, 15 - блок расчета траектории и базовых параметров логического уровня 1, 16 - пользователь/оператор маркиратора, 17 - соответствующий исполнительный механизм маркиратора(ов), 18 - шаговый двигатель соответствующего привода, 19 - датчики привода соответствующей оси привода, 20-дополнительные датчики маркиратора(ов).
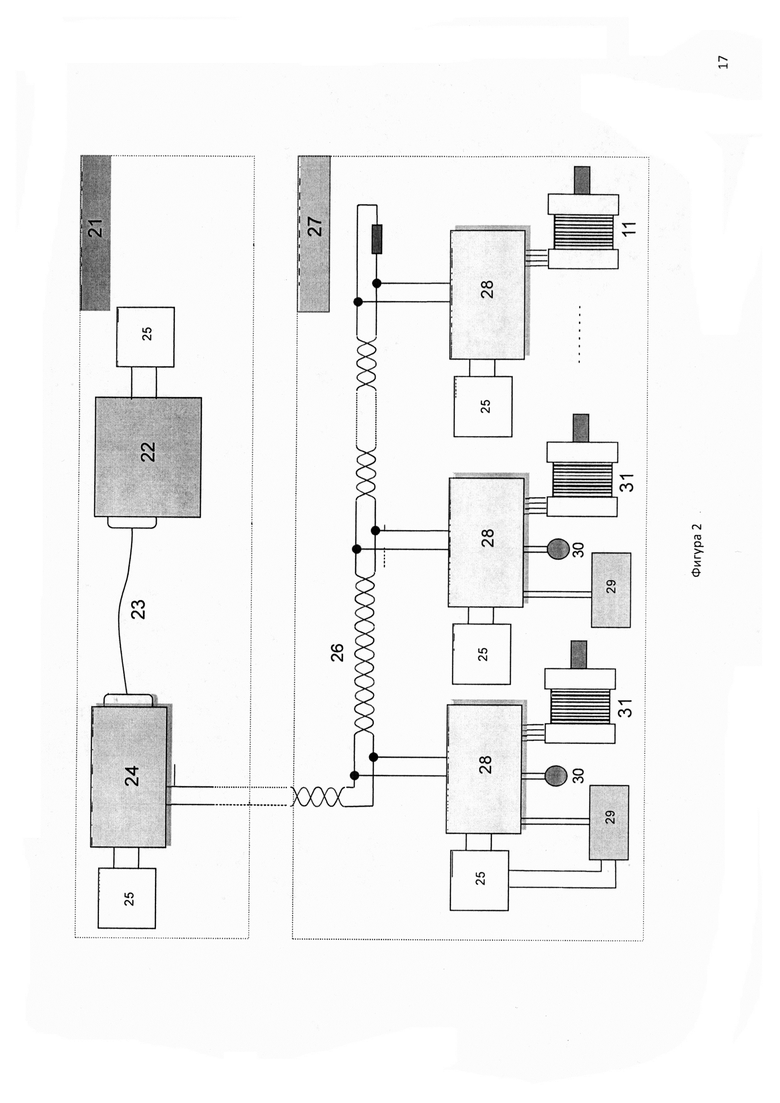
На фиг. 2 показана структурная схема реализации универсально-распределенной гибридной системы управления маркиратором, где 21 - логический уровень 2, 22 - персональный компьютер/планшет/ноутбук/смартфон, 23 - проводной или беспроводной интерфейс с компьютером, 24 - шлюз-конвертер интерфейсов, 25 - источник электропитания, 26 - двухпроводная шина интерфейса CAN связи логических уровней, 27 - логический уровень 1, 28 - гибридные устройства управления соответствующими приводами и исполнительными механизмами маркиратора(ов), 29 - исполнительные механизмы маркиратора(ов), 30 - соответствующие датчики маркиратора(ов), 31 - шаговые двигатели приводов маркиратора(ов).
Общий принцип логической организации работы системы универсально-распределенной гибридной системы управления иллюстрирует фиг. 1. Функциональное построение системы начинается с определения количества задействованных осей маркиратора/ов, в которых необходимо позиционировать исполнительный(ые) механизм(ы), их тип и количество задействованных исполнительных механизмов. При определении типа размещения, конструкционных особенностей расположения приводов и исполнительных механизмов маркиратора, выбирается тип шины 8 двухпроводного интерфейса связи логических уровней. В зависимости от действий оператора 16, вводимых в систему посредством управляющего воздействия на блок 10, базовое устройство управления логического уровня 2 вычисляет необходимые параметры траектории маркируемых символов и базовые параметры позиционирования и движения каждой оси, посредством работы блоков 11, 12, 13 и 15, которые посредством ресурсов шины связи 8 поступают только в нужные устройства управления логического уровня 1. По полученным базовым параметрам устройство управления 1 соответствующего привода в блоках 4, 5 вычисляет собственную систему координат и изменение скорости движения в зависимости от типа разрешения и механической конструкции приводного механизма. В итоге на обмотках соответствующих шаговых двигателей 18, блок 6 формирует дискретные последовательности импульсов, оптимальные по значению тока, перемещая привод в нужную позицию. Если в течении контрольного интервала времени по шине 8 в соответствующее устройство 1 не поступает никаких сообщений, блок 6 снижает рабочее значение тока на обмотках шагового двигателя 18 до минимально допустимого типу конструкции значения. При достижении нужной очередной позиции, согласно траектории формы символа, блок 3 на прямую формирует сигнал активации исполнительного механизма 17. В отдельном случае блок 3 формирует сигналы дополнительному мультиплексору или блоку реле, которые в свою очередь активируют, или отдельный соответствующий механизм 17, или группу исполнительных механизмов 17. Обработка позиционирование продолжается устройством 2 до окончания текущего задания. Обратная связь организуется в форме обработки сигналов, как датчиков самого привода 19, так и от соответствующих дополнительных датчиков 20, которые могут устанавливаться в исполнительных механизмах маркиратора. Оценка работы привода осуществляется блоком 7 по результатам работы блоков вычислителей и сигналам датчиков 19 и 20, и в случае нарушений или срабатывании/несрабатывании соответствующих датчиков блок 7 формирует сигнал для логического уровня 2, который выдает на шину 8. Любые сообщения, поступившие по шине 8 из логического уровня 1, адресованные соответствующему устройству 2 и правильно принятые, подтверждаются обратным откликом, формируемым блоком 7. Общую оценку работоспособности маркиратора и качество выполнения текущих заданий на маркировку выполняет блок 14, выдавая уведомления пользователю в случае каких-либо нарушений, через блок 10, если ошибку невозможно ликвидировать корректировкой базовых параметров.
Функционально реализацию универсально-распределенной гибридной системы управления иллюстрирует фиг. 2. Компьютер/планшет/ноутбук/смартфон 22, передавая соответствующие сообщения, через интерфейс 23, регулирует работу управляющих устройств привода(ов) маркиратора(ов) 28, которые шлюз-конвертер 24 преобразует в сообщения двухпроводного интерфейса 26, понятные управляющим гибридным устройствам 28. В свою очередь гибридные управляющие устройства 28 регулируют работу шаговых двигателей привода 31 и исполнительного механизма(ов) маркиратора(ов) 29, обрабатывая и анализируя сигналы отдатчиков 30. В случае необходимости или ошибки управляющие устройства 28 формируют соответствующие сообщения, которые из сообщений интерфейса 26, преобразуются шлюзом 24 в сообщения интерфейса 23, понятные компьютеру/планшету/ноутбуку/смартфону 22. Все устройства питаются от независимых источников электропитания 25.
В качестве примера использования универсально-распределенной гибридной системы управления можно привести промышленное применение для сертификационной маркировки труб большого диаметра для нефтегазопроводов, где необходимо применение ударно-точечного способа выбивания символов, с последующим нанесением определенных цветовых меток краской, для возможности нахождения основной маркировки, после транспортировки. Соответственно, если использовать устаревшие способы управления маркировочным оборудованием, то необходимо будет применения двух независимых устройств: одно для нанесения ударно-точечной маркировки, другой для маркировки краской, что технологически усложняет процесс изготовления, снижает производительность и поднимает себестоимость. В случае применения настоящего изобретения, становится технически возможным два маркирующих устройства объединить в одно и выполнить два типа маркировки при одной технологической операции с минимальными временными затратами.
Другим примером использования, является промышленное применение различной маркировки на разных участках изготовления отдельных высокоответственных узлов компонентов, тележек железнодорожных вагонов или агрегатов авиационно-космических аппаратов, где необходимо маркировать машиночитаемые 2Д-коды DataMatrix, как способом ударно-точечного выбивания на металлических деталях, так и способом лазерного термического окисления поверхности пластиковых деталей, с условием, что в 2Д-коде закодированы эксплуатационные данные производителя. При использовании устаревших способов управления, выполнение данных технологических операций требует двух отдельных типа маркирующих систем, которым потребуется свои собственные программные и аппаратные методы управления, передачи и кодирования эксплуатационных данных производителя. К тому же, потребуются отдельные дополнительные затраты на адаптацию в информационные ресурсы предприятия, в том числе с применением отдельных адаптационных компьютеров. В случае применения настоящего изобретения, становится технически возможным использовать только одно устройство управления логического уровня 2, для двух маркирующих исполнительных механизмов (ударно-точечного и лазерного), конструкционно выполненных раздельно, территориально и технологически расположенных удаленно, исполняющих свои собственные технологические операции параллельно.
Еще одним примером использования, является промышленное применение маркировки в специализированных многофункциональных металлообрабатывающих центрах с числовым программным управлением (ЧПУ) со сменным инструментом, где требуется сложная специализированная маркировка обрабатываемого изделия без прерывания технологического цикла изготовления, например, при высокой точности и сложности изготовления, или высокой производительности. При использовании устаревших способов управления, это невозможно сделать, так как работа многофункциональных центров ЧПУ представляет функционирование замкнутой аппаратно-программной системы, которая не имеет простых технических и математических способов внедрить маркировку, без изменений, или конструкции, для обеспечения функциональности исполнительного узла маркиратора, или разработки дополнительных программных алгоритмов построения сложной траектории формы маркируемых символов, с последующей компенсацией погрешностей позиционирования для дальнейшей точной металлообработки. В случае применения настоящего изобретения, становится технически возможным использовать устройство маркировки, в рамках уже имеющейся базовой конструкции и программной функциональности центра ЧПУ, при условии применения шлюза-конвертера с беспроводным интерфейсом, например Bluetooth в CAN, что позволяет сделать маркиратор отдельным инструментом центра ЧПУ, полностью автономно выполняющим свою функцию. Фактически для нанесения маркировки в ходе высокоответственного цикла изготовления, не допускающего сложные программные переходы с потерей точности, центр ЧПУ производит только смену обрабатывающего инструмента на соответствующий маркиратор, который самостоятельно выполняет маркировку посредством собственной системы позиционирования исполнительного узла, без движений приводов центра ЧПУ, получив все настройки от отдельного компьютера, не связанного с центром ЧПУ, по соответствующему беспроводному интерфейсу. Главным необходимым требованием работы такого решения в настоящем изобретении, является применение соответствующего аккумуляторного автономного электропитания, при условии, что аккумулятор макриратора должен быть заряжен на момент применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНО-РАСПРЕДЕЛЕННАЯ ГИБРИДНАЯ СИСТЕМА УПРАВЛЕНИЯ КОЛЛАБОРАТИВНЫМ МНОГОЦЕЛЕВЫМ РОБОТОМ С МАШИННЫМ ЗРЕНИЕМ | 2018 |
|
RU2710709C1 |
| КОМБИНИРОВАННОЕ УСТРОЙСТВО ИНТРУЗИВНОЙ МАРКИРОВКИ И ВЕРИФИКАЦИИ СИМВОЛОВ МАШИНОЧИТАЕМЫХ КОДОВ ПРЯМОГО НАНЕСЕНИЯ И ЛЮМИНЕСЦЕНТНЫХ СИМВОЛОВ И ИЗОБРАЖЕНИЙ | 2018 |
|
RU2693681C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОТЕЛЬНОЙ | 2017 |
|
RU2656670C1 |
| БЛОК АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МАЛОГАБАРИТНЫЙ (БАР-М) | 2012 |
|
RU2487385C1 |
| Способ потактового управления несколькими шаговыми двигателями с помощью персонального компьютера по каналу USB и устройство для его осуществления | 2018 |
|
RU2704486C1 |
| ИЗМЕНЯЕМЫЙ ПОЛЕВОЙ ПРИБОР ДЛЯ АВТОМАТИЗАЦИИ ПРОЦЕССОВ | 2003 |
|
RU2327113C2 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2006 |
|
RU2306611C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ И АНАЛИЗА ВЫЗВАННОЙ БИОЭЛЕКТРИЧЕСКОЙ АКТИВНОСТИ МОЗГА ИСПЫТУЕМОГО | 2003 |
|
RU2266043C2 |
| КОМПЛЕКС ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 2004 |
|
RU2279117C2 |
| Система"Автоматический световой указатель положения палубы при качке" | 2018 |
|
RU2695029C1 |

Изобретение относится к средствам, предназначенным для управления работой устройствами нанесения промышленной маркировки. Технический результат заключается в обеспечении возможности распределенного удаленного управления из единого центра несколькими разнотипными маркирующими механизмами существующего производственного технологического процесса и обеспечении возможности использования встраиваемых независимых маркирующих устройств в производственные линии или металлообрабатывающие центры с числовым программным управлением без изменения их функциональности. Система включает два логических уровня управления 1 и 2 с автономными вычислительными устройствами, работающих параллельно, разделяющих процессы вычислений и программной обработки на общие для всех компонентов одного маркиратора или группы маркираторов и частные, индивидуальные, присущие только одному приводу или механизму в одном отдельно взятом маркираторе, где аппаратное исполнение каждого вычислительного устройства логического уровня 1 гибридное и компактное с расположением в/на управляемом шаговом двигателе привода маркиратора, а в качестве управляющего устройства логического уровня 2 может использоваться компьютер, планшет, ноутбук, мобильный смартфон любого типа. 9 з.п. ф-лы, 2 ил.
1. Универсально-распределенная гибридная система управления приводами и исполнительными механизмами маркиратора с обратной связью, включающая вычислительные устройства первого и второго логических уровней, работающих параллельно, и разделяющая процессы вычисления на вычислительные устройства первого уровня, предназначенные для вычислений системы координат и изменения скорости движения в зависимости от типа разрешения и конструкции привода каждого маркиратора, оценки фактов наступления событий привода с активацией управляемых выходов, и вычислительные устройства второго уровня, предназначенные для вычисления параметров траектории маркируемых символов и базовых параметров позиционирования и движения каждой оси маркиратора, в которой устройства управления первого логического уровня совместно с вычислительным устройством образуют гибридное устройство управления таким образом, что каждый привод маркиратора работает независимо от другого привода маркиратора со своим устройством управления, в котором гибридное устройство управления с устройством интерфейсной связи, блоком оценки работоспособности и электрическими схемами сопряжения с датчиками и активации управляемых выходов исполнительных узлов маркиратора располагают на шаговом двигателе соответствующего привода маркиратора стандарта моторных опор NEMA или в непосредственной близости от него, а устройства второго логического уровня предназначены для вычисления параметров траектории и позиционирования как приводов одного отдельного маркиратора, так и группы нескольких маркираторов и передачи в соответствующие устройства управления первого логического уровня, которые управляются устройствами второго логического уровня по схеме ведущий-ведомый, с реакцией ведомого, взаимодействуя между собой по адресным интерфейсам на основе двухпроводных шин интерфейса связи RS-485, CAN, TWI, I2C, ProfiBus, USB, причем в первом логическом уровне блок оценки работоспособности узлов привода каждого маркиратора обрабатывает сигналы соответствующих датчиков и передает уведомления, через указанные интерфейсы связи логических уровней в вычислительное устройство второго логического уровня, с подтверждением обратного отклика, а обратная связь между первым и вторым логическими уровнями реализуется с помощью аппаратных прерываний вычислительного устройства соответствующего уровня, при которых с помощью принудительного прекращения исполнения любых команд, выполняемых до момента поступления прерывания от другого логического уровня, активируется прием сообщения, после исполнение незавершенной команды возобновляется с прерванного места.
2. Система по п. 1, отличающаяся тем, что конструкция гибридного устройства управления приводом маркиратора с шаговым двигателем логического уровня 1 содержит оптимальный усилитель тока, обеспечивающий нужный уровень тока только в моменты активности шагового двигателя и максимально сниженный уровень тока или полностью отключенный во время вынужденных холостых простоев, подключаясь к шаговому двигателю проводниками с минимальной длиной и количеством.
3. Система по п. 1, отличающаяся тем, что сигналы активации исполнительного узла(ов) маркиратора(ов) активируют его механизмы как посредством прямого подключения к выходам гибридного устройства управления логического уровня 1, так и через соответствующий мультиплексор или реле, коммутирующие нужные рабочие напряжения на нужное количество исполнительных узлов.
4. Система по п. 1, отличающаяся тем, что электроснабжение множества гибридных устройств управления приводов маркиратора с шаговым двигателем реализуется на основе электрических цепей постоянного напряжения от 12 до 40 В по двухпроводной схеме от централизованного единого источника, или раздельно от локальных источников, не имеющих между собой гальванической связи, или аккумуляторных батарей, по необходимости.
5. Система по п. 1, отличающаяся тем, что применение интерфейсов передачи данных с двухпроводными шинами позволяет удалить при необходимости устройства логических уровней 1 и 2 друг от друга без потери функциональности и проблем передачи тока большой величины на значительные расстояния.
6. Система по п. 1, отличающаяся тем, что возможно применять различные шлюзы-конвертеры как проводных интерфейсов, или USB в CAN, или USB в RS-485, или USB в ProfiBus, или Ethernet в CAN, или Ethernet в RS-485, или Ethernet в ProfiBus, так и беспроводных, или Wi-Fi в CAN, или Wi-Fi в RS-485, или Wi-Fi в ProfiBus, или Bluetooth в CAN, или Bluetooth в RS-485, или Bluetooth в ProfiBus, или ZigBee в CAN, или ZigBee в RS-485, или ZigBee в ProfiBus, или WirelessUSB в CAN, или WirelessUSB в RS-485, или WirelessUSB в ProfiBus, или HomeRF в CAN, или HomeRF в RS-485, или HomeRF в ProfiBus, для использования в качестве устройства управления логического уровня 2 различных устройств с числовым программным управлением любых сторонних производителей, обеспечивающих нужную производительность и функциональность.
7. Система по п. 1, отличающаяся тем, что логический уровень 2 реализуется единым устройством или несколькими устройствами управления, непосредственно подключенными к двухпроводной шине интерфейса взаимодействия или через соответствующие шлюзы интерфейсов, и если реализация логического уровня 2 выполнена из нескольких вычислительных устройств, то они работают совместно, синхронизируя свою работу программно, одновременная асинхронная работа не допускается.
8. Система по п. 1, отличающаяся тем, что применение одновременно работающих устройств управления логических уровней 1 и 2 ограниченно количеством применяемых шлюзов-конвертеров и количеством адресов адресного пространства задействованного интерфейса двухпроводной шины связи, поддерживаемых каждым шлюзом-конвертером.
9. Система по п. 1, отличающаяся тем, что в качестве управляющих устройств логического уровня 2 могут использоваться любые персональные компьютеры, ноутбуки, неттопы, нетбуки, планшеты или одноплатные миникомпьютеры, мобильные смартфоны, работающие под управлением ОС Windows, Unix, Linux, Android, MAC OS, iOS.
10. Система по п. 1, отличающаяся тем, что управляющие устройства логических уровней 1 и 2 могут быть выполнены в одной конструкции или могут быть разделены и удалены на расстояние, которое обеспечивает шина задействованного интерфейса взаимодействия и используемый шлюз-конвертер.
| US 6135022A, 24.10.2000 | |||
| УЗЕЛ ДЛЯ СГОРАНИЯ СИГАРЕТЫ, РУЧНОЕ УСТРОЙСТВО ДЛЯ ФИЛЬТРАЦИИ БОКОВОЙ СТРУИ ДЫМА, РЕСИВЕР И ИХ КОМБИНАЦИЯ | 1997 |
|
RU2159067C2 |
| CN 2004622836U, 09.09.2015 | |||
| US 6435742B1, 20.08.2002 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ МНОГОДВИГАТЕЛЬНОГО ЭЛЕКТРОПРИВОДА | 1992 |
|
RU2071635C1 |

