Изобретение относится к средствам предназначенным для управления работой устройствами классифицируемыми по ГОСТ Р ИСО 8373-2014 как роботы и робототехнические устройства, с поддержкой интерфейса пользователя и обратной связью в реальном времени, в которых посредством прецизионных приводных механизмов позиционирования исполнительно узла на шаговых двигателях, производиться регулируемый захват и перемещение объекта/ов по заданной траектории в нужный момент времени в нужную точку пространства.
Роботы и робототехнические устройства имеют прецизионные механизмы позиционирования исполнительного узла, и исполнительный узел, который захватывает и удерживает объект в соответствующем положении с допустимой погрешностью и нагрузкой. Прецизионные приводные механизмы изготавливаются из дискретных приводов робота различного типа (призматический или выдвижной шарнир, цилиндрический шарнир, сферический шарнир), перемещаемых мощными гибридными синхронными шаговыми двигателями. Существующая конструкция управления такими позиционирующими механизмами организованна по принципу единого центрального специализированного блока управления с различными модулями, который схемотехнически (аппаратно) и алгоритмически (программно) контролирует все логические и аппаратные уровни, включая: интерфейс(ы) пользователя; обработку общих параметров движения; отслеживание текущего местоположения исполнительного узла; вычисление нового местоположения промежуточной точки траектории движения и т.д., и в итоге формируя дискретные импульсные сигналы конечным шаговым двигателям, согласно исполняемого алгоритма, а также команды/сигналы исполнительному механизму робота. Данная конструкция управления имеет два типа исполнения (примеры описаны в патентах US 4744039, US 7181314 В2, US 9669544 В2, 2587101 С2):
Тип 1. Обобщенный, где главный контроллер имеет в своем составе схемы формирования дискретных импульсных сигналов обмоток шаговых двигателей соответствующих осей приводив механизма исполнительного узла и дополнительные электронные устройства сопряжения. Главный контроллер данного типа, может состоять из нескольких контроллеров аппаратно взаимодействующих на основе электрических сигналов уровней ТТЛ или КМОП в пределах одной электронной платы или единого устройства. В качестве главного контроллера исполнения типа 1. может использоваться специализированное ЭВМ, которое конструкционно оснащено дополнительными электронными устройствами/модулями сопряжения. При этом, все логические алгоритмические уровни вычислений в рамках функций управления и формирования итоговых дискретных сигналов выполняются только главным контроллером, на основе обработки сигналов обратных связей.
Тип 2. Разделенный, где главный контроллер не имеет схем формирования дискретных импульсных сигналов для обмоток шаговых двигателей приводов механизма исполнительного узла и дополнительные электронные устройства сопряжения. Сигналы шаговых двигателей формируются аппаратно в отдельно выделенных устройствах - драйверах шаговых двигателей, содержащих дополнительные электронные устройства сопряжения. Привода робота с шаговым двигателем управляются главным контроллером посредством стека протоколов дискретных сигналов STEP-DIR или CW/CCW. При этом устройства управления шаговым двигателем не осуществляют никаких логических функций управления, а являются только электронными устройствами формирования последовательности дискретных импульсов нужного уровня, мощности и последовательности, в соответствии с тактирующим сигналом получаемым от главного контроллера. Главный контроллер типа 2, тоже может состоять из нескольких контроллеров, аппаратно взаимодействующих на основе электрических сигналов уровней ТТЛ или КМОП, в пределах одной электронной платы или единого устройства, с электронными схемами/устройствами формирования сигналов протоколов STEP-DIR или CW/CCW. В качестве главного контроллера типа 2, тоже может использоваться специализированная многопроцессорная ЭВМ, конструкционно управляющая отдельными электронными устройствами формирования сигналов протоколов STEP-DIR или CW/CCW, через, как-параллельный LPT, последовательный СОМ, так и порты универсальной последовательной шины USB. При этом, все логические алгоритмические уровни вычислений в рамках функций управления и формирования итоговых дискретных сигналов выполняются тоже только главным контроллером, на основе обработки сигналов обратных связей.
Как в исполнении типа 1, так и в исполнении типа 2, главный контроллер всегда, не только вычисляет текущее местоположение механизмов робота, но и осуществляет всю логическую обработку общего задания на выполняемое перемещение. Общее задание на движение включает вычисления, координат максимального, ограниченного, операционного, охраняемого и рабочего пространства; преобразования глобальных координат в координаты опоры, координаты механического интерфейса, координаты системы соединения и координаты рабочего органа; скоростей перемещения механических приводов исполнительного узла; моменты ускорения, замедления в процессе движения; траектории движения в зависимости от окружающей обстановки и задания; разрешение дискретных элементов пути; количество и качество срабатываний исполнительною узла в определенных местах траектории, и т.д. Данная логическая обработка имеет сложный взаимосвязанный многозадачный уровень программных вычислений, и их реализация полностью зависит от аппаратной реализации главного контроллера, что невозможно с применением только одной ЭВМ. Итогом такой программной обработки, являются данные на основе которых формируются импульсные токовые сигналы на перемещение в соответствующую позицию и включение исполнительного узла робота.
Недостатками исполнения типа 1 и 2, является серьезная ограниченность в возможности переконфигурирования робота, изменении алгоритмов его работы. Любое изменение конфигурации применения робота вызывает модернизацию базовых программ и алгоритмов работы отдельных вычислительных схем главного контроллера, в виду сильной зависимости от аппаратной реализации. Возникает необходимость детального аппаратно-программного тестирования с поверкой на точность исполнения, а в отдельных случаях требуется переделка аппаратной реализации контроллеров, или целиком, или частично.
К тому же, применение исполнений типа 1 и 2 вносит сильные ограничения в быстродействие работы робот, так как в этом случае ограничена производительность главного контроллера, в виду явной перегруженности процессора(ов) одновременным исполнением множества задач различных логических уровней вычислений, особенно, это выражается, когда управление ведется более, чем в двух приводных осях привода маркиратора (X, Y, R и Z), где нужно вычислять текущее и будущее местоположение всех осей одновременно. Возможным решением проблемы быстродействия многозадачности робота, является применение сверхскоростных плат и процессоров, использование нескольких процессоров на одной плате, что неэффективно удорожает стоимость оборудования, увеличивает аппаратные габариты и энергопотребление, вносит проблемы синхронизации и теплоотведения, в итоге не решая общего комплекса имеющихся проблем.
К тому же, применение исполнений типов 1 и 2 не позволяет реализовать схему, где один главный контроллер, может управлять работой несколькими роботами работающими одновременно автономно независимо друг от друга. В этом случае многозадачность вычислений увеличится па соответствующее независимым управляемым роботам количество раз.
К тому же, исполнение типов 1 и 2 не позволяет реализовать гибкую схему сенсорного контроля окружающего пространства посредством различных типов датчиков или машинного зрения Фактически нет возможности использовать датчики внутри системы управления, свободно переконфигурируя их логическое назначение в соответствии с выполняемыми операциями и окружающей обстановкой, для правильности действий приводных механизмов робота, при безопасном достижение исполнительным узлом нужной позиции местоположения. Нет возможности реализовать функции текущего встроенного контроля работоспособности отдельных компонентов робота. Реализуется косвенный программный алгоритмический контроль по датчикам конкретного назначения, или интеграция внешних сенсорных устройств и систем, которые аппаратно подключаются к системе управления механизмами робота, требуя их аппаратно-программной адаптации/настройки.
К тому же, если требуется максимальная компактность робота, исполнение типов 1 и 2, ограничивает возможности объединения схемы формирования дискретных импульсных сигналов управления обмотками мощных шаговых двигателей приводных механизмов позиционирования исполнительного узла в одной конструкции с приводом. Компактность исполнения робота, также зависит от возможной компактности главного центрального контроллера, поэтому часто робот и его главный контроллер выполняется раздельно. В этом случае, робот включает в себя только приводы осей, шаговые двигатели и механизм исполнительного узла, а главный контроллер с устройством управления шаговым двигателем управляет, через кабели, где сигналы передаются на значительном удалении (удаленность от 1,5 до 5 метров), что заставляет формировать увеличенный по токовым показателям импульсный сигнал, с учетом потерь тока в управляющем кабеле, а значит, использовать дорогостоящий многожильный кабель достаточного сечения проводников. В этой связи устройство управления приводом робота с шаговым двигателем имеет значительные габариты, обусловленные размерами силовых элементов усилителей тока, и их системы охлаждения.
К тому же, кабели гибридных шаговых двигателей могут иметь, или 4, или 6 выводов обмоток, которые необходимо подключить индивидуально для каждого двигателя. Учитывая количество необходимых для работы робота приводов (возможно до 6-ти), общее количество проводников в общем кабеле управления двигателями робота, может меняться от 24 до 36, что порождает дополнительные элементы в конструкции робота, которые обеспечивают прокладку и защиту длинных кабельных силовых проводников, увеличивая общие габариты и массу. Дополнительно требуются проводники для передачи сигналов управления рабочему органу робота и сигналов от встроенной системы датчиков, что также увеличивает их общее количество в зависимости от типа механизмов робота.
К тому же, еще одной проблемой удаленного управления шаговыми двигателями, является невозможность снижать токовую нагрузку обмоток шаговых двигателей, во время их вынужденного простоя, так как невозможно без значительной временной задержки, обусловленной переходными процессами в длинном кабельном соединении, переключить шаговый двигатель в нормально активный рабочей режим. Любое изменение рабочего тока на обмотках удаленного шагового двигателя сказывается на производительности робота, что актуально в промышленных масштабах использования.
К тому же, постоянная токовая нагрузка обмоток удаленных шаговых двигателей негативно сказывается на их эксплуатационной надежности с преждевременным выходом из строя, как самих обмоток шагового двигателя, так и выходных каскадов усилителей тока драйвера шагового двигателя. Это же является причиной чрезмерного потребления электроэнергии, что особенно актуально, если робот должен иметь автономное мобильное исполнение и работать от аккумулятора или ограниченного по ресурсу тока источника. Чрезмерная нагруженность обмоток порождает проблему теплоодвода.
К тому же, эксплуатация робота на базе исполнения типов 1 и 2, ставит общую конструкцию в жесткую зависимость от работы главного контроллера, любая поломка блока управления не позволяет использовать робот каким-либо образом. Выход из строя любого компонента единою центрального управляющего блока приводит к полной неработоспособности робота. Тем самым, исполнение тип 1 и тип 2 имеет очень низкую эксплуатационную ремонтопригодность.
К тому же, конструкция робота на базе исполнения типов 1 и 2, позволяет реализовать управление только одним роботом в единицу времени. Одновременное управление группой роботов не возможно.
К тому же, применение системы машинного зрения в конструкции робота на базе исполнения типов 1 и 2, делает не возможным создание единой конструкции, где программно-аппаратно объединены элементы подвижных механизмов и электронных компонентов робота с техническими видеокамерами и устройствами обработки и верификации видеоизображений. Как правило сейчас подобные решения, даже выполненные в одном конструктивном корпусе, представляют две разные системы обменивающиеся данными на уровне специально адаптированного стека центрального контроллера управления, что требует дополнительных затрат на адаптацию, усложняет переконфигурирование машинного зрения под различные задачи, удорожает стоимость конструкции, увеличивая количество коммуникаций, снижая надежность.
Задача, поставленная перед настоящим изобретением, заключается в создании экономически и энергетически выгодной, достаточно быстродействующей, чувствительной к окружающей обстановке, и надежной системы управления приводами робота на шаговых двигателях, с активацией его рабочего органа и поддержкой интерфейсов пользователя, способной легко адаптироваться под различные задачи, как в части точного прецизионного перемещения объектов, так и регулируемого воздействия на объект, при неограниченном количестве приводных осей, как одним роботом, так и их группой.
Настоящая задача решается тем, что управление согласно изобретению организуется но универсально-распределенной гибридной системе управления приводными механизмами и исполнительным узлом, имеющей два независимых автономных логических уровня, разделяющих процессы вычислений и программной обработки, на общие, для всех компонентов одного робота или группы роботов, и частные, специализированно индивидуальные, присущие только одному приводу или механизму в одном отдельно взятом роботе, где аппаратное исполнение каждого вычислительного устройства достаточно упрощенное и компактное (размеры NEMA 11 или NEMA 17 или NEMA 23) в рамках производительности функций исполняемых независимых процессов, и располагаемое в непосредственной близости с управляемым шаговым двигателем, и включающее устройства управления обмотками шагового двигателя, интерфейсной связи, блок оценки работоспособности и электрические схемы сопряжения с датчиками и активации управляемых выходов исполнительных узлов маркираторов. Аппаратно-программная реализация осуществляет логическое разделение процессов по двум уровням следующим образом:
Логический уровень 1 осуществляет частные процессы: оценки аварийных и критических ситуаций для остановки текущего действия или минимизируя его; расчета координат привода - координатной системы соединения; обработки и анализа текущей позиции шагового двигателя привода и преобразования ее в систему координат соединения; интеллектуальную регулировку параметров скорости вращения с динамическим изменением, содержащим фазы ускорения и замедления: динамического переключения разрешения шагов перемещения шагового двигателя; дискретной регулируемой обработки сигналов обратной связи от различных датчиков, типа энкодер, оптический или лазерный сенсор, сухой контакт или аналоговый уровень, ультразвуковой датчик расстояния, ИК датчик препятствий, датчик удара-вибрации; регулировать активацию выходных сигналов типа ТТЛ или КМОП, а также любой программный комплекс последовательности процессов логического уровня 1, постоянно поддерживая интерфейс с логическим уровнем 2;
Логический уровень 2 осуществляет общие процессы: пересчета абсолютной системы координат в координатную систему робота - координатную систему опоры робота и наоборот; пересчета координатной системы соединений робота в систему координат опоры и наоборот; вычисления взаимного расположения, рабочего, ограниченного и операционного пространств; вычисления предельных параметров скоростей движения соединений; формирования аварийных и критических признаков движения соединений; обработки и анализа общих последовательностей выполнения перемещений для каждого соединения; оценки структуры оптимального построения траектории, тем самым формируя предельно-граничные параметры функционирования логического уровня 1, постоянно поддерживая, как интерфейс с логическим уровнем 1, так и с оператором робота и внешней системой хост управления, по общеизвестным или специализированным протоколам.
Технический результат заключается в том, что работа множества контроллеров/процессоров двух разных уровней логической обработки на основе универсально-распределенной гибридной системы управления, позволяет осуществлять автономную независимую индивидуальную работу, как прецизионных приводных механизмов позиционирования одного исполнительного узла, так и активации их множества, в форме нескольких однотипных или гибридных промышленных роботов, в соответствии с алгоритмами предустановленных программам вычислительных устройств логического уровня 1, разгружая ресурсы вычислительного устройства логического уровня 2, обеспечивая ему возможность обработки сложных задач общего назначения и интерфейсов пользователя, с возможностью модернизации отдельных алгоритмов, распараллеливая одновременно выполняемые процессы управления и исполнения множества отдельных задач, посредством их разбиения на процессы соответствующего логического уровня с обратной связью.
При этом, вычислительные устройства логического уровня 1 выполняются максимально компактными, с физически распределенным размещением непосредственно на шаговых двигателях соответствующего привода соединения робота стандарта моторных опор NEMA 11 или NEMA 17 или NEMA 23 в непосредственной близости от него, и конструктивно содержащие схемы формирования дискретных импульсных сигналов обмоток шаговых двигателей, тем самым полностью исключая передачу высокотоковых сигналов на значительные расстояния. Уровень передаваемого импульсного токового сигнала обмоток шагового двигателя определяется оптимально необходимым удерживающим моментов шагового двигателя для конкретной конструкции шарнира.
При этом, взаимодействие между распределенными вычислительными устройствами логических уровней 1 и 2 осуществляется по адресным интерфейсам на основе двухпроводных шип: RS-485. CAN, TW1, I2C, ProfiBus, USB.
При этом, взаимодействие логического уровня 1 с логическим уровнем 2 осуществляется по схеме ведущий-ведомый с полной автономностью выполнения основных логических функций собственного уровня, с реакцией ведомого не превышающей интервал 1 мсек.
При этом, обратная связь между логическими уровнями реализуется на основе аппаратных прерываний вычислительного устройства соответствующего уровня, принудительно прекращающих исполнение любой текущей задачи, до момента приема сообщения от другого логического уровня, после приема такого сообщения, исполнение незавершенной задачи возобновляется с прерванного места.
При этом, каждый привод соединения робота работает индивидуально автономно на логическом уровне 1, никак не связанно, ни программно, ни аппаратно с любым другом приводом. Все распределенные логические устройства логического уровня 1, подключены к общей двухпроводной шине, получая базовые исходные данные от устройств логического уровня 2.
При этом схема формирования дискретных импульсных сигналов управления шаговым двигателем конкретного привода робота, расположена совместно с вычислительным устройством логическою уровня 1, образуя гибридное устройство управления, исключающее временные потери и большие переходные процессы в цепях длинных проводников, с возможностью программно снижать нагрузку на обмотках шагового двигателя в моменты холостого вынужденного простоя привода, экономя электроэнергию и не перегружая электрические цепи и обмотки, увеличивая надежность конструкции маркиратора.
При этом, сигналы активации исполнительного узла/ов робота, активируют его механизмы как посредством прямого подключения к выходам управляющего устройства логического уровня 1, так и через соответствующий мультиплексор или реле, коммутирующие нужные рабочие напряжения на нужное количество исполнительных узлов.
При этом, применение интерфейсов с двухпроводными шинами, снижает количество проводов в кабеле управления гибридными шаговыми двигателями до 2-х, облегчая габариты и конструкцию маркиратора с возможностью их более удобной скрытой защищенной прокладки и экономии на проводниках.
При этом система электроснабжения множества гибридных устройств управления приводов робота реализуется на основе электрических цепей постоянного напряжения от 12 до 40 Вольт, по двухпроводной схеме от централизованного единого источника или раздельно от локальных источников, не имеющих между собой гальванической связи, по необходимости, таким образом общее количество используемых проводников для работы каждого отдельного привода робота не превышает 4-х проводов (2-ва, шины интерфейса связи, и 2 - ва, электропитания), к которым можно подключаться параллельно.
При этом, применение интерфейсов передачи данных с двухпроводными шинами, позволяет удалить при необходимости устройства логических уровней 1 и 2 друг от друга (зависит от используемою интерфейса, для CAN до 1 км), без потери функциональности и проблем передачи тока большой величины на значительные расстояния.
При этом, возможно применять различные шлюзы-конвертеры, как проводных интерфейсов, или USB в CAN, или USB в RS-485, или USB в ProfiBus, или Ethernet в CAN, или Ethernet в RS-485, или Ethernet в ProfiBus, так и беспроводных, или Wi-Fi в CAN, или Wi-Fi в RS-485, или Wi-Fi в ProfiBus, или Bluetooth в CAN, или Bluetooth в RS-485, или Bluetooth в ProfiBus, или WirclessUSB в CAN, или WirelessUSB в RS-485, или WirelessUSB в ProfiBus, или HomeRF в CAN, или HomeRF в RS-485, или HomeRF в ProfiBus, для использования в качестве устройства управления логического уровня 2 различных устройств с числовым программным управлением любых сторонних производителей, обеспечивающих нужную производительность и функциональность.
При этом, применение одновременно работающих устройств управления логического уровня 1 ограниченно количеством применяемых шлюзов-конвертеров, и количеством адресов адресного пространства, задействованного интерфейса двухпроводной шины связи логических уровней, поддерживаемых каждым шлюзом-конвертером.
При этом, с учетом применения шлюзов-конвертеров интерфейсов, как внутри конструкции робота, возможно использовать соответствующие по производительности персональные компьютеры, или ноутбуки, или нетбуки, или неттопы, или планшеты, или мобильные смартфоны, работающие под управлением, или ОС Windows, или ОС Linux, или ОС Unix, или ОС Android, или ОС MAC OS, или ОС iOS, что позволяет легко конфигурировать конструкцию робота в нужных технологических условиях, и поддерживать его функционирование в случае выхода управляющего устройства логического уровня 2, за счет его замены, с переустановкой соответствующих программных драйверов и пользовательского программного обеспечения логического уровня 2.
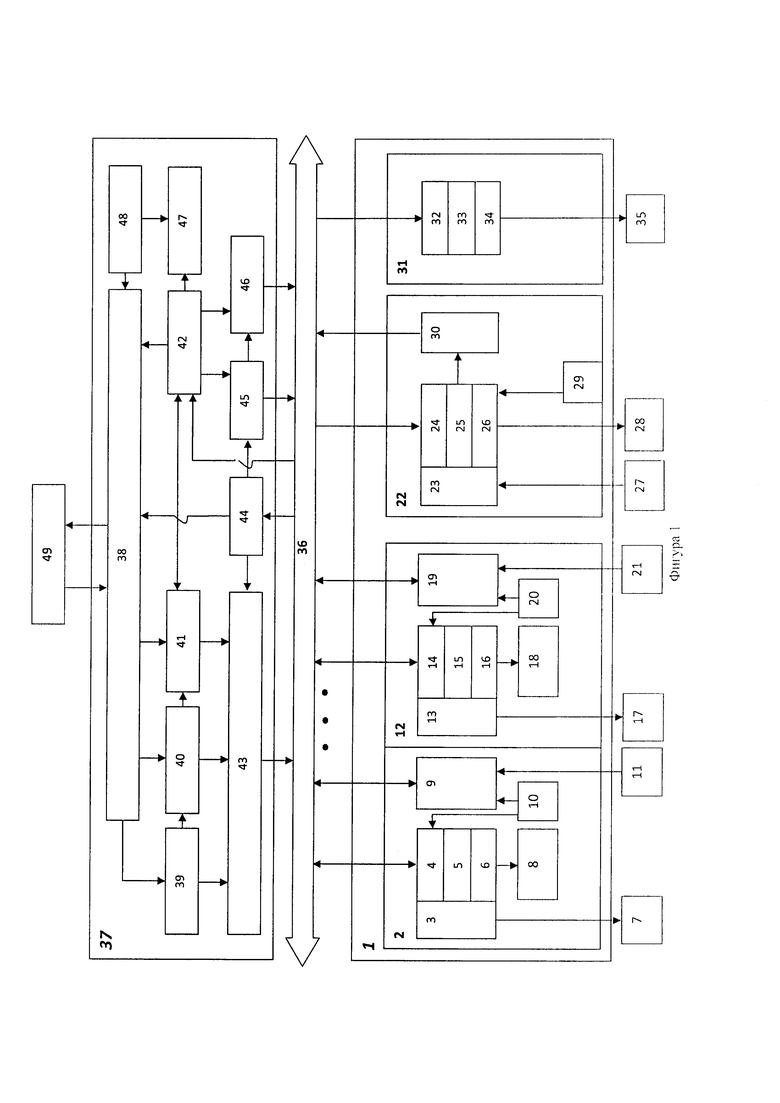
На фиг. 1 показана общая функционально-логическая архитектура построения универсально-распределенной гибридной системы управления роботом, где 1 - логический уровень 1, 2 устройство управления первой осью робота, 3 - блок активации исполнительного механизма первой оси робота, 4 - блок расчета и настройки координат первой оси привода, 5 - блок расчета и настройки параметров скорости, фаз замедления и ускорения первой оси, 6 - блок формирования дискретных импульсных сигналов шагового двигателя первой оси, 7 - исполнительный механизм первый оси робота, 8 - шаговый двигатель привода первой оси, 9 - блок оценки работоспособности узлов привода первой оси и аварийной остановки, 10 - проприоцентивные внутренние датчики привода первой оси, 11 - экстеросептивные дополнительные внешние датчики привода первой оси, 12 - устройство управления N-ой осью робота, 13 - блок активации исполнительного механизма N-ой осью робота, 14 - блок расчета и настройки координат N-ой осью робота, 15 - блок расчета и настройки параметров скорости, фаз замедления и ускорения N-ой оси, 16 - блок формирования дискретных импульсных сигналов шагового двигателя N-ой оси, 17 - N-ой исполнительный механизм робота, 18 - шаговый двигатель привода N-ой оси, 19 - блок оценки работоспособности узлов привода второй оси, 20 - проприоцентивные внутренние датчики привода N-ой оси, 21 -экстеросептивные дополнительные внешние датчики привода N-ой оси, 22 - оптический модуль распознавания и декодирования видео изображения, 23 - оптический мегапиксельный фотосенсор, 24 - блок активации оптического модуля, 25 - блок цифровой фильтрации и обработки цифрового изображения, 26 - блок оценки качества распознавания изображения, 27 управляемая фокусирующая линза с оптическим светофильтром, 28 - устройство позиционирования линзы, или излучатель лазерного дальномера, 29 - фотодатчик уровня освещенности, или приемник лазерного дальномера, 30 - блок декодирования цифрового изображения, 31 - оптическая светодиодная насадка. 32 - блок активации оптической насадки, 33 - блок расчета параметров подсветки, 34 - схема аналогового импульсного управления элементами подсветки, 35 - светодиодная сборка, 37 -логический уровень 2, 38 - блок интерфейсов пользователя, 39 - блок расчета пространств и систем координат в соответствующих плоскостях робота, 40 - блок расчета разрешения участков пути, 41 -блок расчета общих параметров движения и траектории, 42 - блок верификации цифрового изображения, 43 - блок расчета частных траекторий с преобразованием координат и отдельных параметров логического уровня 1, 44 - блок оценки положения, работоспособности робота и качества выполнения текущего задания, 45 - блок инициализации оптического модуля распознавания и декодирования символа машиночитаемого кода, 46 - блок инициализации оптической насадки. 47 -блок долговременной памяти, 48 - блок формирования растрового видеоизображения. 49 - пользователь/оператор робота.
Функционирование и построение робота с универсально-распределенной гибридной системой управления, проиллюстрированное на фиг. 1, начинается с определения количества задействованных осевых проводов робота, в которых необходимо позиционировать исполнительный(ые) мсхапизм(ы), их тип и количество, их может быть от 4-х, и до 8-ми. Для упрощения на фиг. 1 изображена схема, где указаны только два осевых привода. При определении типа размещения, конструкционных особенностей расположения приводов и исполнительных механизмов робота, выбирается тип шипы 36 двухпроводного интерфейса связи логических уровней. Функционирование логического уровня 37 осуществляется на платформе любого существующего компьютера, планшета или смартфона, с применением или без дополнительных устройств. В зависимости от действий оператора 47, вводимых в систему посредством управляющего воздействия на блок 38, базовое устройство управления логического уровня 2 вычисляет необходимые параметры траектории движения робоза и частные параметры позиционирования и движения каждой оси, посредством работы блоков 39, 40, 41 и 43, которые посредством ресурсов шины связи 36 поступают только в нужные устройства управления логического уровня 1. По полученным базовым параметрам устройство управления 1 соответствующего привода в блоках 4, 5 и 14, 15 вычисляет собственную систему координат и изменение скорости движения в зависимости от типа разрешения и механической конструкции приводного механизма. В итоге на обмотках соответствующих шаговых двигателей 8 и 18, блоки 6 и 16 формирует дискретные последовательности импульсов, оптимальные по значению тока, перемещая привод в нужную позицию. Если в течении контрольного интервала времени по шине 8 в соответствующее устройство 1 не поступает никаких сообщений, блоки 6 и 16 снижают рабочее значение тока на обмотках шаговых двигателей 8 и 18 до минимально допустимого типу конструкции значения. При достижении нужной очередной позиции, согласно траектории формы символа, блоки 3 и 13 на прямую формирует сигнал активации исполнительных механизмов 7 и 17. В отдельном случае блоки 3 и 13 формируют сигналы дополнительному мультиплексору или блоку реле, которые в свою очередь активируют, или отдельный соответствующий механизм, иди 7, или 17, или их одновременно. Обработка позиционирования продолжается устройствами 2 и 12 до окончания текущего задания. Обратная связь организуется в форме обработки сигналов, как датчиков самого привода 10 и 20, так и от соответствующих внешних дополнительных датчиков 11 и 21, которые могут устанавливаться в исполнительных механизмах маркиратора. При этом оценка сигналов от внутренних датчиков 10 и 20, преобразуется блоками 4 и 14 в систему координат оси привода и передается как последовательность координат для логического уровня 2, через шину 36 в блок 44. Оценка работы привода осуществляется блоками 9 и 19 по результатам работы блоков вычислителей и сигналам датчиков 10, 11, 20 и 21, и в случае нарушений или срабатывании/несрабатывании соответствующих датчиков, блоки 9 и 19 формируют сигнал для логического уровня 2. который выдают на шину 36. Любые сообщения поступившие по шине 36 из логическою уровня 1, адресованные соответствующему устройству логического уровня 2 и правильно принятые, подтверждаются обратным откликом, формируемым блоком 9 и 19. Общую оценку работоспособности робота и качество выполнения текущих заданий па перемещение выполняет блок 44, выдавая уведомления пользователю в случае каких-либо нарушений, через блок 38, если ошибку невозможно ликвидировать, корректируя базовые параметры через блок 43. Так же, блок 44 инициализирует процессы верификации цифрового изображения, через блок 45, который посредством шины 36, активирует один или несколько модулей оптической фиксации видеоизображений 22, в котором блок 24 активирует внутренние компоненты оптического модуля, и исходя из степени освещенности, зарегистрированной фотодатчиком 29, выбирает соответствующие параметры работы фотосенсора 23, настраивая его под оптимальный контраст изображения. Блок оценки качества изображения 26, по данным от фотосенсора 23, или по данным от лазерного дальномера высчитывает соответствующую фокусную позицию линзы 27, настраивая лучший контраст, через устройство позиционирования линзы 28. Полученное цифровое изображение поступает в блок 25 для цифровой фильтрации и обработки, результат обработки в форме цифрового массива данных передается в блок декодирования 30. Декодированный результат от блока 30, через шину 36 поступает в блок верификации цифрового изображения кода 42, где сравнивается с базой исходных эталонов цифровых изображений, по ключевым признакам с установленной вероятностью распознавания. Итог верификации выдается посредством блоков 48 и 38 пользователю 49 и в блок долговременной памяти 47. В случае низкого процента совпадения видеоизображения, или не поступления никаких декодируемых данных по завершению соответствующего действия робота, блоком 46, через шину 36 инициализируется оптическая насадка и модуля оптической фиксации видеоизображения 22. В ходе инициализации оптической насадки блок активации 32, выбирает режимы требуемой подсветки. В соответствии с частотой инициализации насадки за контрольный период времени, блок 33 пересчитывает параметры подсветки в рамках предустановленных алгоритмов, формируя управляющие воздействия на схему 34 аналогового импульсного управления светодиодной сборкой 35.
В качестве примера использования универсально - распределенной гибридной системы управления коллаборативным роботом с машинным зрением, можно привести промышленное применение где возможна автоматизация повторяющихся однотипных процессов, где необходимо оценивать состояние объекта, его положение и перемещение из одной точки пространства в другую, с четко определенными параметрами его расположения. Имея низкую стоимость, высокую адаптивность и эксплуатационную ремонтопригодность за счет отказа от централизованного управления от единого контроллера, удалив человека из масштабного однотипного процесса, значительно увеличивается производительность и уменьшаются простои и ошибки. На современных производствах масса повторяющихся процессов, к которым можно отнести:
- циклическую обработку однотипных изделий на станках, где требуется смена заготовки и удаление готового продукта;
- агрегацию изделий;
- расфасовку изделий.
Другим примером промышленного применения, является конвейерное сборочное производство сложных многоузловых изделий, где сборщику (человеку) необходимо ассистировать в процессе выбора соответствующего очередного конструкционного компонента собираемого узла, с целью снижения косвенных временных затрат на поиск нужного или заблаговременное жесткое структурирование в окружающей обстановке. Робот, используя систему машинного зрения, способен распознать нужный компонент в минимальной структуре, по образам его эталонных изображений, и за время установки очередного компонента сборщиком, найти и подготовить очередной.
Еще одним примером использования, является промышленное применение робота при сварочных операциях, где требуется совместное выполнение сварки со сварщиком, где применение ручной сварки в ключевых местах сложной части конструкции, может быть совмещено с машинной автоматической сваркой роботом, оценивающим процесс посредством машинного зрения. То же самое можно использовать в процессах диспесинга различных герметизирующих или клеящих химических составов, особенно с вредными для человека свойствами.
Изобретение относится к средствам, предназначенным для управления роботом. Система управления содержит два логических уровня управления, первый и второй, с автономными вычислительными устройствами, работающих параллельно. Аппаратное исполнение каждого вычислительного устройства первого логического уровня гибридное и компактное, с расположением в на управляемом шаговом двигателе привода соединения робота, а в качестве управляющего устройства второго логического уровня используется компьютер, планшет, ноутбук, мобильный смартфон. Изобретение обеспечивает создание быстродействующей, чувствительной к окружающей обстановке, и надежной системы управления приводами робота на шаговых двигателях, с активацией его рабочего органа и поддержкой интерфейсов пользователя, способной легко адаптироваться под различные задачи, как в части точного прецизионного перемещения объектов, так и регулируемого воздействия на объект, при неограниченном количестве приводных осей. 1 з.п. ф-лы, 1 ил.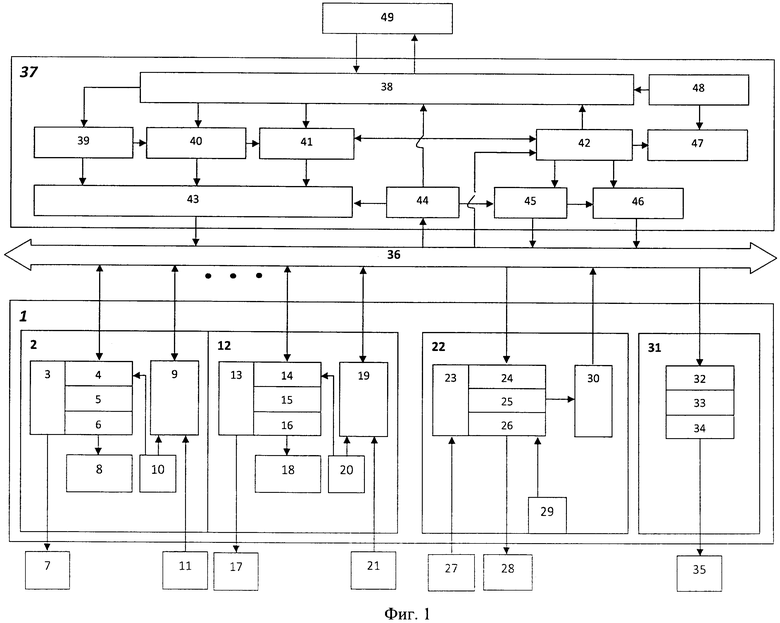
1. Универсально-распределенная гибридная система управления роботом с обратной связью, включающая вычислительные устройства первого и второго логических уровней, работающих параллельно и разделяющих процессы вычисления на вычислительные устройства первого уровня, предназначенные для вычислений системы координат, изменения скорости движения привода в зависимости от типа перемещения и конструкции соединения робота блоком расчета и настройки параметров скорости, фаз замедления, оценки дискретной регулируемой обработки сигналов обратной связи от датчиков, и блоком активации исполнительного механизма, аварийной остановки, замедления, и устройств распознавания растровых видеоизображений с их декодированием в блоке цифровой фильтрации и обработки цифрового изображения, управления оптическими элементами автофокусировки и светодиодной подсветки блоком оценки качества распознавания изображения, и вычислительные устройства второго уровня, предназначенные для вычисления системы координат опоры робота, расчета частных траекторий с преобразованием координат и отдельных параметров первого логического уровня, параметров общей траектории перемещения и базовых параметров позиционирования и движения каждого соединения в своей оси в блоках расчета разрешения участков пути, и общих параметров движения и траектории, преобразования системы координат соединений робота в систему координат базовой опоры робота в блоке расчета пространств и систем координат соответствующих плоскостей робота и верификации цифровых изображений, полученных из блоков декодирования цифрового изображения первого логического уровня с эталонными снимками и геометрическими формами, оценки текущего положения робота, его работоспособности и качества выполнения текущего задания перемещения, при этом вычислительные устройства управления первого логического уровня совместно с вычислительным устройством второго логического уровня образуют гибридное устройство управления таким образом, что каждый привод соединения робота и оптический модуль считывания и светодиодной подсветки изображений работают независимо друг от друга со своим устройством управления, в котором гибридные устройства управления приводом с устройством интерфейсной связи, блоком оценки работоспособности, электрическими схемами сопряжения с проприоцентивными и экстеросептивными датчиками и активации управляющих выходов исполнительных механизмов привода располагают на шаговом двигателе соответствующего привода соединения робота, в непосредственной близости от него, а устройство оптического считывания, декодирования и подсветки изображений располагают совместно с устройствами первого логического уровня, при этом в качестве устройства управления второго логического уровня используют компьютер, планшетный компьютер, коммуникатор/смартфон, работающие под управлением операционных систем Windows, Unix, все платформы Linux, Android, iOS и FreeOS, и предназначенные для хранения данных, вычисления параметров траекторий и позиционирования приводов всех соединений робота и настроек оптических элементов обработки цифровых изображений, автофокусировки, светодиодной подсветки, передачи их в соответствующие устройства управления первого логического уровня, которые управляются устройствами второго логического уровня по схеме ведущий-ведомый, с реакцией ведомого, с взаимодействием между собой по адресным интерфейсам на основе двухпроводных шин интерфейса связи CAN, TWI, I2C, USB, RS-485 и ProfiBus через шлюзы-конвертеры проводных интерфейсов, USB в CAN, Ethernet в CAN, и беспроводных, Wi-Fi в CAN, Bluetooth в CAN, WirelessUSB в CAN, HomeRF в CAN, причем блоки оценки работоспособности узлов каждого привода соединения робота и блоки декодирования изображений первого логического уровня обрабатывают сигналы датчиков и цифровое изображение, и передают сообщения с результатом декодирования через указанные интерфейсы связи логических уровней в вычислительное устройство второго логического уровня с подтверждением обратного отклика, а обратная связь между первым и вторым логическими уровнями реализуется с помощью аппаратных прерываний вычислительного устройства соответствующего уровня, при которых с помощью принудительного прекращения исполнения любых команд, выполняемых до момента поступления прерывания от другого логического уровня, активируется прием сообщения, и после исполнения незавершенной команды возобновляется с прерванного места, при этом итоговые данные о времени верификации цифровых изображений сохраняются в устройстве управления второго логического уровня с фиксацией координат нахождения распознанного объекта.
2. Система по п.1, отличающаяся тем, что устройства управления второго логического уровня оснащены модулем геолокации.
| УНИВЕРСАЛЬНО-РАСПРЕДЕЛЕННАЯ ГИБРИДНАЯ СИСТЕМА УПРАВЛЕНИЯ МАРКИРАТОРАМИ С ОБРАТНОЙ СВЯЗЬЮ | 2017 |
|
RU2657919C1 |
| Координатный проектор | 1948 |
|
SU83858A1 |
| US 6135022 A1, 24.10.2000. | |||

