Изобретение относится к средствам маркировки изделий и оптического считывания и декодирования символов машиночитаемых штриховых-кодов различного типа, выполненных методом прямого нанесения на различные поверхности, как с низким, так и высоким контрастом различимости отдельных элементов кода.
На сегодняшний день широко применяются нанесение долговременных машиночитаемых символов/кодов посредством прямого интрузивного воздействия на поверхность изделия. Интрузивное маркирование основано на изменении поверхности изделия с целью создания символа, предназначенного для визуального или машинного считывания. К современным методам интрузивного маркирования относятся прямое лазерное маркирование и ударно-точечное (иглоударное) маркирование. Интрузивное маркирование отличает свойство долговечности и восстанавливаемости, так как при таком воздействии существенно изменяются базовые химико-физические параметры материала маркируемого изделия, которые сохраняются на весь период жизненного цикла изделия, а в случае преднамеренного/непреднамеренного полного уничтожения маркировки, при общей целостности изделия, визуализация символов может быть восстановлена при соответствующем химическом воздействии.
Из всех интрузивных методов маркирования наиболее долговечным является иглоударный метод, так как в нем ударный игольчатый пуансон вдавливанием послойно уплотняет структуру материала на глубину значительно превосходящую зону воздействия, в форме конусообразного углубления. При этом известен способ (патент RU 2316049 от 27.01.2008) ударно-точечного маркирования, где образ цифробуквенного изображения получают с помощью автоматического станка ударного воздействия, где сила удара иглы станка для части точечных углублений, делают более глубокой, по отношению к остальной части углублений, чтобы различия в глубине между отдельными углублениями символа можно было обнаружить с использованием оптических средств. Так же, известен способ (патент RU 2490709 от 20.08.2013) ударно-точечного маркирования, где символьная метка прямого нанесения формируется заполнением конических углублений после иглоударной маркировки флуоресцентной краской, поглощающей излучение на длинах волн УФ и ИК диапазонов. Так же, известен способ (патент RU 2528086 от 10.09.2014) ударно-точечного маркирования. где ударное воздействие острой иглы на поверхность детали осуществляется через вспомогательную полимерную пленку или фольгу с одновременным послойным нанесением на образующиеся стенки конических кратеров углублений коррозийно-стойких порошков люминофора оксисульфида иттрия, активированного интербирием и эрбием, и раствора полимерной смолы в этилацетате, которые переносятся иглой на стенки образующихся конических углублений.
Во всех выше перечисленных иглоударных методах требуется применение автоматизированного маркирующего устройства способного прецизионно перемещать ударный исполнительный узел с достаточным по силе вдавливания приводом игольчатого пуансона по траектории маркируемого символа, иметь возможность контролировать текущее положение иглы, что возможно, только при использовании числового программного управления, функционирующего на специализированном контроллере, и дискретных линейных приводов с шаговыми двигателями.
Лазерный метод маркирования менее долговечный, так как результат окисления материала атмосферным кислородом под воздействием лазерного излучения вызывает, или образование тонких поверхностных оксидных пленок, или полное испарение материала с образованием микротрещин за счет температурного натяжения материала и окалины, по своей глубине не превышающей размер зоны окисления. При этом известен способ (патент RU 2460619 от 10.09.12) лазерной гравировки, где удаление(испарение) материала осуществляется лазерным лучом с поступательным перемещением и одновременным вращением пучка лазерного излучения. Так же известен способ (заявка РСТ WO 2008093006 от 07/08/2008), где происходит механическое перемещение луча по двум координатам относительно неподвижного изделия. Так же известен способ (патент 2357844 от 10.06.2009) получения цветного изображения на металлической поверхности в виде оксидной пленки за счет термоимпульсного воздействия лазера на металлическую поверхность с одновременным перемещением и охлаждением, регулируя расстояние между зонами термического воздействия.
Во всех выше перечисленных лазерных методах требуется применение автоматизированного маркирующего устройства с лазерным источником, способного прецизионно перемещать и модулировать лазерный луч с определенной интенсивностью излучения и диаметром, который направляют посредством оптического или механического прецизионного механизма позиционирования, с контролем мощности и стабильности излучения, что как и при иглоударном маркировании возможно, только при использовании числового программного управления, функционирующего на специализированном контроллере, и дискретных, или угловых, или линейных приводах с шаговыми двигателями. Единственное существенное отличие лазерных маркираторов от иглоударных в необходимости дополнительно точно регулировать термостабильность лазерного источника.
Существующие конструкции управления такими интрузивными маркираторами организованы по принципу единого центрального специализированного блока управления, который схемотехнически (аппаратно) и алгоритмически (программно) контролирует все логические и аппаратные уровни, включая: интерфейс(ы) пользователя; обработку общих параметров маркировки; отслеживание текущего местоположения исполнительного узла; вычисление нового местоположения части формы маркируемого символа и т.д., и в итоге формируя дискретные импульсные сигналы шаговым двигателям, согласно исполняемого алгоритма, а также команды/сигналы исполнительному механизму маркиратора. Данная конструкция управления имеет два типа исполнения.
Тип 1. Обобщенный, где главный контроллер имеет в своем составе схемы формирования дискретных импульсных сигналов обмоток шаговых двигателей соответствующих осей приводов механизма исполнительного узла и дополнительные электронные устройства сопряжения. Главный контроллер данного типа, может состоять из нескольких контроллеров аппаратно взаимодействующих на основе электрических сигналов уровней ТТЛ или КМОП в пределах одной электронной платы или единого устройства. В качестве главного контроллера исполнения типа 1, может использоваться специализированное ЭВМ, которое конструктивно оснащено дополнительными электронными устройствами сопряжения. При этом, все логические алгоритмические уровни вычислений в рамках функций управления и формирования итоговых дискретных сигналов выполняются только главным контроллером, без обратных связей.
Тип 2. Разделенный, где главный контроллер не имеет схем формирования дискретных импульсных сигналов для обмоток шаговых двигателей приводов механизма исполнительного узла и дополнительные электронные устройства сопряжения. Сигналы шаговых двигателей формируются аппаратно в отдельно выделенных устройствах - драйверах шаговых двигателей, содержащих дополнительные электронные схемы сопряжения. Привода маркиратора с шаговым двигателем управляются главным контроллером посредством стека протоколов дискретных сигналов STEP-DIR или CW/CCW. При этом привода маркиратора с шаговым двигателем не осуществляют никаких логических функций управления, а являются только электронными устройствами формирования последовательности дискретных импульсов нужного уровня, мощности и последовательности, в соответствии с тактирующим сигналом получаемым от главного контроллера. Главный контроллер типа 2, тоже может состоять из нескольких контроллеров, аппаратно взаимодействующих на основе электрических сигналов уровней ТТЛ или КМОП, в пределах одной электронной платы или единого устройства, с электронными схемами/устройствами формирования сигналов протоколов STEP-DIR или CW/CCW. В качестве главного контроллера типа 2, тоже может использоваться специализированная многопроцессорная ЭВМ, конструктивно управляющая отдельными электронными устройствами формирования сигналов протоколов STEP-DIR или CW/CCW, через, как параллельный LPT, последовательный СОМ, так и порты универсальной последовательной шины USB. При этом, все логические алгоритмические уровни вычислений в рамках функций управления и формирования итоговых дискретных сигналов выполняются, тоже только главным контроллером, и тоже без обратных связей.
Как в исполнении типа 1, так и в исполнении типа 2, главный контроллер всегда, не только вычисляет текущее местоположение исполнительного узла маркиратора, или иглоударного, или лазерного, но и осуществляет всю логическую обработку общего задания на выполняемую маркировку. Общее задание на маркировку включает вычисления: взаимного расположения маркируемых символов; скорости перемещения исполнительного узла; моменты ускорения, замедления в процессе движения; траектории движения в зависимости от форм маркируемого символа и степени воздействия на материал; разрешение нанесения дискретных элементов символа; количество и качество срабатываний исполнительного узла в определенных местах траектории маркируемого символа, и т.д. Данная логическая обработка имеет сложный взаимосвязанный многозадачный уровень программных вычислений, и их реализация полностью зависит от аппаратной реализации главного контроллера, что невозможно с применением только одной ЭВМ. Итогом такой программной обработки, являются данные на основе которых формируются импульсные токовые сигналы на перемещение в соответствующую позицию и включение исполнительного узла маркиратора.
Недостатками исполнения типа 1 и 2, является серьезная ограниченность в возможности переконфигурирования маркирующего оборудования, изменении алгоритмов его работы. Любое изменение формы маркируемого символа вызывает модернизацию базовых программ и алгоритмов работы отдельных вычислительных схем главного контроллера, в виду сильной зависимости от аппаратной реализации. Возникает необходимость детального аппаратно-программного тестирования с поверкой на точность исполнения, а в отдельных случаях требуется переделка аппаратной реализации контроллеров, или целиком, или частично.
К тому же, применение исполнений типа 1 и 2 вносит сильные ограничения в быстродействие работы маркирующей системы, так как в этом случае ограничена производительность главного контроллера, в виду явной перегруженности процессора(ов) одновременным исполнением множества задач различных логических уровней вычислений, особенно, это выражается, когда управление ведется более, чем в двух приводных осях привода маркиратора (X, Y, R и Z), где нужно вычислять текущее и будущее местоположение всех осей одновременно. Возможным решением проблемы быстродействия многозадачности при маркировке символов, является применение сверхскоростных плат и процессоров, использование нескольких процессоров на одной плате, что неэффективно удорожает стоимость оборудования, увеличивает аппаратные габариты и энергопотребление, вносит проблемы синхронизации и теплоотведения, в итоге не решая общего комплекса имеющихся проблем.
Интрузивное маркирование изначально предназначалось для визуального чтения символов человеком, но в последнее время развитие вычислительных и оптоэлектронных технологий позволяет широко использовать для этого оптическое машинное считывание (машинное зрение).
Выполнение любой технологической операции, а тем более маркировки машиночитаемых кодов, например 2Д кодов типа DataMatrix или QRCode, обязательно сопровождается контролем качества, в данном случае верификацией кода. Это гарантирует создание с помощью маркировочного оборудования правильного машиночитаемого символа кода. Верификация обеспечивает улучшение характеристик считывания, а также сокращение затрат, связанных с пересортицей, подменой, потерей или возвратом изделий из-за не читаемости символов. Если изделие потеряет свою идентичность при некачественной маркировке, его проблематично использовать по назначению. Верификация позволяет выявлять технические проблемы на начальном этапе маркирования, которые возникают, из-за дефектов приводных механизмов с шаговыми двигателями, изношенности ударной иглы, потере оптической проницаемости среды излучения лазера, плохого закрепления изделия или его загрязнения, ошибок в работе программной части управляющего контроллера. Верификатор символа представляет собой специализированный оптический считыватель включающий в себя средства освещения, оптические элементы фильтрации, направления и фокусировки световых потоков, фотоприемник/ки, программное обеспечение обработки и фильтрации цифровых графических изображений, программное обеспечение декодирования. Верификаторы могут быть выполнены в виде портативных или стационарных оптоэлектронных устройств считывания изображений с числовым программным управлением, работающих, как в видимом, так и ультрафиолетовом и инфракрасном диапазонах светового излучения. Подобные устройства фиксации изображений отмаркированного символа кода работают на различимости, контрасте основных его элементов относительно светоотражающих способностей основной поверхности материала маркируемого изделия, при активном направленном освещении. На различимость или контраст влияют параметры направленного источника света, светоотражающие и поверхностные светопоглащающие свойства, как поверхности маркируемого изделия, так и отдельных элементов кода, в форме иглоударных конических углублений, или шероховатостей, микротрещин от лазерного воздействия, без или с люминесцентной краской или композицией, или оксидной поверхностной пленки.
Портативные считывающие устройства, могут свободно перемещаться и позиционироваться оператором для изменения оптических условий фиксации изображения символов, что позволяет динамически получить лучшую контрастность кода в постоянно изменяющихся условиях освещенности. Стационарные считывающие устройства располагаются в фиксированном положении и их функциональность сильно зависит от условий освещенности, так как для них нет возможности динамически изменять контрастность кода, тем самым ограничивая применение. Таким образом, портативные устройства обладают большими возможностями применимости в различных условиях и просты в использовании, а со специализированных оптическими насадками не имеют ограничений в сферах применения.
Известно устройство (патент RU 96992 U1 от 20.08.2010) портативного считывателя символов машиночитаемого кода, где импульсы светодиодов целеуказания осветительного блока оптической части не совпадают по времени с импульсами светодиодной подсветки, а оптимальный уровень освещения выбирается автоматически, за счет регулирования силы тока в двух мощных светодиодах подсветки, при этом используются светодиоды с узким спектральным диапазоном и камерой диффузного освещения. Так же известен способ (патент RU 2481634 от 10.05.2013) портативного считывателя символов кода, где создается дополнительный рассеянный световой поток, посредством конусного светового кольца и специальных алгоритмов сравнения двух световых полей. Так же известен способ (патент RU 2430414 от 27.09.2011) портативного считывателя символов кода, где оптическое устройство считывания реализовано в форме сканера и насадки с иллюминатором массово возбуждающим люминесценцию светодиодов и оптической системы фильтрации и фокусировки, проецирующей изображение на сенсор сканера, прикрепленной к сканеру, а управление светодиодами иллюминатора осуществляется посредством электронной схемы с фотодатчиками, реагирующими на активацию световых импульсов светодиодов подсветки/прицеливания сканера.
Существующее маркирующее оборудование состоит из маркирующей головки и контроллера, соединенных специализированными кабелями управления и снабжения. Существующие считыватели кодов прямого нанесения не имеют полноценного интерфейса "человек-машина" и ограничены в возможностях хранения результатов декодирования, по этому требуют обязательного подключения к полноценному компьютеру, через соответствующе программно-аппаратное сопряжение. В случае реализации комбинированного рабочего места маркирования и верификации символов машиночитаемых кодов существующими методами и устройствами, учитывая что каждая функция выполняется отдельно в определенных условиях, необходимо задействовать целый комплекс сложных технических устройств в несколько технологических процедур, и осуществить ряд сложных организационно-технических мероприятий для управления маркировкой и выработки критериев оценки качества ее выполнения, или с участием оператора, который будет оценивать результат, что учитывая "человеческий фактор" не исключает возникновение ошибок, или еще одной дополнительной дорогостоящей программно-аппаратной компонентой "машинным интеллектом" в виде целого ряда устройств, осуществляющих сложный компьютерный анализ. Все это, порождает несколько сложных проблем, которые требуют дорогостоящих решений, в некоторых случаях их не возможно решить. В особых условиях в зонах повышенной опасности и загрязненности, с присутствием радиоактивности или химической активности, или в условиях наличия повышенных температур, больших электромагнитных помех, в условиях ведения боевых действий, или сложных климатических условиях и т.п., выполнении маркировки и осуществление верификации должно производится максимально быстро со 100% достоверностью. Таким примером является учетная маркировка топливных стержней атомных силовых установок судов, при их эксплуатационной замене, где необходим автоматизированный учет хранимых замененных стержней топливных элементов. Маркировка запорной арматуры ячейки хранения топливного стержня осуществляется непосредственно в соответствующей зоне хранения, где естественный фон радиоактивности завышен, и все операции необходимо выполнять в наиболее кротчайшие сроки минимальным количеством технических устройств, с проверкой правильности нанесения машиночитаемого кода, ошибки не допускаются. Другим примером, является сертификационная маркировка запорной арматуры высокого давления нефтяных или газовых магистральных трубопроводов, где выполнение маркировки и верификация должны осуществляться непосредственно в месте расположения сертифицируемого запорного устройства в нефтегазопроводе, вне помещений в полевых условиях, где использование ряда сложных аппаратно-программных средств затруднено. Еще одним примером, является маркировка в рамках банковского залогового кредитования, где необходимо выполнение кредитором маркировки и верификации заложенного имущества заемщика устойчивыми и долговременным машинным способом, где все операции должны выполняться оптимально компактными средствами, быстро и юридически достоверно, без участия какого-либо заинтересованного лица, исключая последующие правовые споры, основанные на противоречивости реализации технических аспектов.
Часто требуется максимальная компактность маркиратора, исполнения типа 1 и 2, ограничивают возможности объединения схемы формирования дискретных импульсных сигналов управления обмотками шаговых двигателей приводных механизмов позиционирования исполнительного узла в одной конструкции с самим приводом. Компактность исполнения маркиратора, также зависит от возможной компактности главного центрального контроллера, именно поэтому маркиратор, и его контроллер часто разделены. В этом случае, маркиратор включает в себя только приводы осей, шаговые двигатели и механизм исполнительного узла, а главный контроллер с устройством управления шаговым двигателем управляет, через кабели, где сигналы передаются на значительном удалении (удаленность от 1,5 до 5 метров), что заставляет формировать увеличенный по токовым показателям импульсный сигнал, с учетом потерь тока в управляющем кабеле, а значит, использовать дорогостоящий многожильный кабель достаточного сечения проводников. В этой связи устройство управления приводом маркиратора с шаговым двигателем имеет значительные габариты, обусловленные размерами силовых элементов усилителей тока, и их системы охлаждения.
К тому же, эксплуатация маркираторов на базе исполнения типа 1 и 2, ставит общую конструкцию в жесткую зависимость от работы главного контроллера, любая поломка блока управления не позволяет использовать маркирующую систему каким-либо образом. Выход из строя любого компонента единого центрального управляющего блока приводит к полной неработоспособности всей установки. Тем самым, исполнение тип 1 и тип 2 имеет очень низкую эксплуатационную ремонтопригодность.
К тому же, считыватель символов машинных кодов прямого нанесения, является специализированным устройством фиксации и обработки изображений, в котором повреждение любой части: корпуса, оптического визира, органа управления, разъема интерфейса связи, требует его дорогостоящего ремонта на базе производителя. Специализация такого оборудования делает его малодоступным для широкого потребителя и не позволяет быстро его заменить. Для работы считывателя с люминесцентными метками, так же требуется сложная адаптация, которая делает его еще менее ремонтопригодным и доступным.
Задача, поставленная перед настоящим изобретением, заключается в создании экономически эффективного, доступного, удобного и простого комбинированного устройства, которое позволит быстро выполнять, как процесс маркирования интрузивным методом (иглоударным или лазерным), так и сразу же считав получившиеся символы прямого нанесения, верифицировать машинный код.
Настоящая задача решается тем, что комбинированное устройство маркировки и верификации, согласно изобретению, работает по универсально-распределенной гибридной системе управления приводными механизмами, исполнительным узлом маркиратора и оптическим считывателем машинных кодов, имеющей два независимых автономных логических уровня, разделяющих процессы вычислений и программной обработки, на общие, для всех компонентов маркиратора, и частные, специализированно индивидуальные, присущие только одному приводу или механизму в одном отдельно взятом маркираторе, где аппаратное исполнение каждого вычислительного устройства достаточно упрощенное и компактное (размеры NEMA 11 или NEMA 17) в рамках производительности функций исполняемых независимых процессов, и располагаемое в непосредственной близости с управляемым шаговым двигателем привода, и включающее устройства управления обмотками шагового двигателя, интерфейсной связи, блок оценки работоспособности и электрические схемы сопряжения с датчиками и активации управляемых выходов исполнительных узлов маркиратора, блок фотофиксации и декодирования символа машинного кода. Аппаратно-программная реализация комбинированного устройства осуществляет логическое разделение процессов по двум уровням следующим образом:
Логический уровень 1 осуществляет частные процессы: обработки и анализа текущей позиции шагового двигателя привода; интеллектуальную регулировку параметров скорости вращения с динамическим изменением, содержащим фазы ускорения и замедления; динамического переключения разрешения шагов перемещения шагового двигателя; дискретной регулируемой обработки сигналов обратной связи от различных датчиков, типа энкодер, оптический лазерный сенсор, сухой контакт или аналоговый уровень; регулировать активацию выходных сигналов типа ТТЛ или КМОП; оценки изображения символа машинного кода и декодирования, а также любой программный комплекс последовательности процессов логического уровня 1, постоянно поддерживая интерфейс с логическим уровнем 2;
Логический уровень 2 осуществляет общие процессы: обработки и анализ общих последовательностей задач выполнения маркировки; вычисления предельных параметров скоростей нанесения символов; вычисления взаимного расположения маркируемых символов в рабочем поле одной задачи; оценки структуры графических форм маркируемых символов и построения их траекторий; верификации результатов декодирования машиночитаемого кода, тем самым формируя предельно-граничные параметры функционирования логического уровня 1, постоянно поддерживая, как интерфейс с логическим уровнем 1, так и с пользователем маркиратора и внешней системой хост управления, по общеизвестным или специализированным протоколам.
Технический результат заключается в том, что работа множества контроллеров/процессоров двух разных уровней логической обработки на основе универсально-распределенной гибридной системы управления, позволяет осуществлять автономную независимую индивидуальную работу, как прецизионных приводных механизмов позиционирования исполнительного узла, так и оптического модуля считывания символа машинного кода, в соответствии с алгоритмами предустановленных программ вычислительных устройств логического уровня 1, разгружая ресурсы вычислительного устройства логического уровня 2, обеспечивая ему возможность обработки сложных задач общего назначения и интерфейсов пользователя, верификации кода, с возможностью модернизации отдельных алгоритмов, распараллеливая одновременно выполняемые процессы управления и исполнения множества отдельных задач, посредством их разбиения на процессы соответствующего логического уровня с обратной связью.
При этом, вычислительные устройства логического уровня 1 выполняются максимально компактными, с физически распределенным размещением непосредственно на шаговых двигателях соответствующего привода маркиратора или в непосредственной близости от него, и конструктивно содержащие, как схемы формирования дискретных импульсных сигналов обмоток шаговых двигателей, тем самым полностью исключая передачу токовых сигналов на значительные расстояния, так и оптической фокусировки и фильтрации со светодиодной подсветкой. Уровень передаваемого импульсного токового сигнала обмоток шагового двигателя определяется оптимально необходимым удерживающим моментов шагового двигателя, а оптические условия считывания максимальной близостью к символу и отсутствием изменений оптических условий и свойств символа кода, после маркировки.
При этом, взаимодействие между распределенными вычислительными устройствами логических уровней 1 и 2 осуществляется по адресным интерфейсам на основе двухпроводных шин: USB, CAN, TWI, I2C.
При этом, взаимодействие логического уровня 1 с логическим уровнем 2 осуществляется по схеме ведущий-ведомый с полной автономностью выполнения основных логических функций собственного уровня, с реакцией ведомого не превышающей интервал 1 мсек.
При этом, обратная связь между логическими уровнями реализуется на основе аппаратных прерываний вычислительного устройства соответствующего уровня, принудительно прекращающих исполнение любой текущей задачи, до момента приема сообщения от другого логического уровня, после приема такого сообщения, исполнение незавершенной задачи возобновляется с прерванного места.
При этом, каждый привод маркиратора работает индивидуально автономно на логическом уровне 1, никак не связанно, ни программно, ни аппаратно с любым другим приводом. Все распределенные логические устройства логического уровня 1, подключены к общей двухпроводной шине, получая базовые исходные данные от устройств логического уровня 2.
При этом, схема формирования дискретных импульсных сигналов управления шаговым двигателем конкретного привода маркиратора, расположена совместно с вычислительным устройством логического уровня 1, образуя гибридное устройство управления, исключающее временные потери и большие переходные процессы в цепях длинных проводников, с возможностью программно снижать нагрузку на обмотках шагового двигателя в моменты холостого вынужденного простоя привода, экономя электроэнергию и не перегружая электрические цепи и обмотки, увеличивая надежность конструкции маркиратора.
При этом, сигналы активации исполнительного узла/ов маркиратора, активируют его механизмы как посредством прямого подключения к выходам управляющего устройства логического уровня 1, так и через соответствующий мультиплексор или реле, коммутирующие нужные рабочие напряжения на нужное количество исполнительных узлов.
При этом, в непосредственной близости от исполнительного узла маркиратора в области приводных механизмов с шаговыми двигателями, может размещаться автономный оптический модуль считывания и декодирования машинных кодов, который функционирует на логическом уровне 1 по общему двухпроводному интерфейсу, выдает для логическому уровню 2 сигналы успешного или неуспешного декодирования отмаркированного кода, для последующей их верификации.
При этом, применение интерфейсов с двухпроводными шинами, снижает количество проводов в кабеле управления гибридными шаговыми двигателями до 2-х, облегчая габариты и конструкцию маркиратора с возможностью их более удобной скрытой защищенной прокладки и экономии на проводниках.
При этом, система электроснабжения множества гибридных устройств управления приводов маркиратора реализуется на основе электрических цепей постоянного напряжения от 12 до 40 Вольт, по двухпроводной схеме от централизованного единого источника или раздельно от локальных источников, не имеющих между собой гальванической связи, по необходимости, таким образом общее количество используемых проводников для работы каждого отдельного привода маркиратора не превышает 4-х проводов (2-ва, шины интерфейса связи, и 2-ва, электропитания), к которым можно подключаться параллельно.
При этом, применяются шлюзы-конвертеры, как проводных интерфейсов USB в CAN, так и беспроводных, или Wi-Fi в CAN, или Bluetooth в CAN, для использования в качестве устройства управления логического уровня 2 различных устройств с числовым программным управлением любых сторонних производителей, обеспечивающих нужную производительность и функциональность.
При этом, с учетом применения шлюзов-конвертеров интерфейсов внутри конструкции маркиратора, возможно использовать любые планшеты, или мобильные смартфоны, работающие под управлением, или ОС Windows, или ОС Linux, или ОС Unix, или ОС Android, или ОС MAC OS, или ОС iOS, что позволяет легко конфигурировать конструкцию маркиратора в нужных технологических условиях, и поддерживать его функционирование в случае выхода управляющего устройства логического уровня 2, за счет его замены, с переустановкой соответствующих программных драйверов и пользовательского программного обеспечения логического уровня 2.
При этом, мобильное планшетное устройство, или смартфон, в качестве устройства управления логического уровня 2, в своей корпусной конструкции может содержать один или несколько автономных оптических модулей считывания и декодирования машинных кодов, которые функционируют на логическом уровне 1 и связаны с логическим уровнем 2 по двухпроводному интерфейсу.
При этом, автономные оптические модули считывания и декодирования машинных кодов, логического уровня 1, содержать, или контрастный, или фазовый автофокус, или лазерный дальномер, или устройство "жидка линза", и управляют светодиодной подсветкой, направленно освещая получившейся символ прямого нанесения и правильно фокусируя его изображение для декодирования машинный код. В случае нескольких оптических модулей, итоговая оценка результатов декодирования осуществляется вычислительным устройством логического уровня 2.
При этом, мобильное планшетное устройство, или смартфон, в качестве устройства управления логического уровня 2, могут оснащаться дополнительной оптической светодиодной насадкой, или дополнительной направленной подсветки нужного светового диапазона видимых волн, или возбуждающей люминесценцию флуоринцентной символьной метки в ультрафиолетовом или инфракрасном диапазонах длин волн, которые функционируют на логическом уровне 1 и связаны с логическим уровнем 2 по двухпроводному интерфейсу.
При этом, мобильное планшетное устройство, или смартфон, в качестве устройства управления логического уровня 2, оснащены встроенным аккумулятором и могут быть подключены к общему источнику электропитания комбинированного устройства.
При этом, мобильное планшетное устройство, или смартфон, в качестве устройства управления логического уровня 2, может фиксировать геолокационные данные места, где выполнялась маркировка и верификация символа машиночитаемой метки, сохраняя фотоснимок отмаркированного кода, время и координаты местоположения в долговременной памяти, или передавать посредством встроенных модемов стандартов сотовой мобильной связи или сетей Wi-Fi.
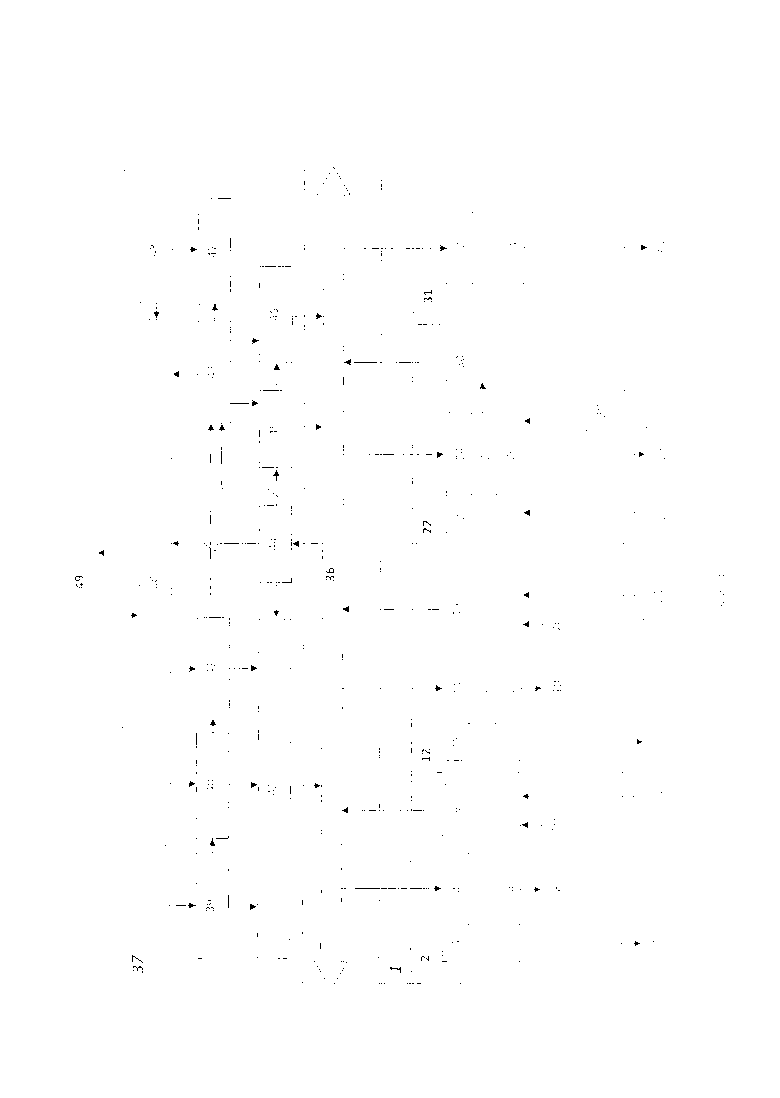
На фиг. 1 показана общая функционально-логическая архитектура построения комбинирующего устройства маркировки и верификации с универсально-распределенной гибридной системой управления, где 1 - логический уровень 1, 2 - устройство управления первой осью маркиратора, 3 - блок активации исполнительного механизма первой оси маркиратора, 4 - блок расчета и настройки координат первой оси привода, 5 - блок расчета и настройки параметров скорости, фаз замедления и ускорения первой оси, 6 - блок формирования дискретных импульсных сигналов шагового двигателя первой оси, 7 - первый исполнительный механизм маркиратора, 8 - шаговый двигатель привода первой оси, 9 - блок оценки работоспособности узлов привода первой оси, 10 - датчики привода первой оси, 11 - дополнительные датчики привода первой оси, 12 - устройство управления второй осью маркиратора, 13 - блок активации исполнительного механизма второй оси маркиратора, 14 - блок расчета и настройки координат второй оси привода, 15 - блок расчета и настройки параметров скорости, фаз замедления и ускорения второй оси, 16 - блок формирования дискретных импульсных сигналов шагового двигателя второй оси, 17 - второй исполнительный механизм маркиратора, 18 - шаговый двигатель привода второй оси, 19 - блок оценки работоспособности узлов привода второй оси, 20 - датчики привода второй оси, 21 - дополнительные датчики привода второй оси, 22 - оптический модуль распознавания и декодирования символа машиночитаемого кода, 23 - оптический мегапиксельный фотосенсор, 24 - блок активации оптического модуля, 25 - блок цифровой фильтрации и обработки цифрового изображения, 26 - блок оценки качества распознавания изображения, 27 - управляемая фокусирующая линза с оптическим светофильтром, 28 - устройство позиционирования линзы, или излучатель лазерного дальномера, 29 - фотодатчик уровня освещенности, или приемник лазерного дальномера, 30 - блок декодирования машинного кода, 31 - оптическая светодиодная насадка, 32 - блок активации оптической насадки, 33 - блок расчета параметров подсветки, 34 - схема аналогового импульсного управления элементами подсветки или возбуждения люминесценции, 35 - светодиодная сборка, 37 - логический уровень 2, 38 - блок интерфейсов пользователя, 39 - блок расчета расположения элементов символа в соответствующих осях маркиратора, 40 - блок расчета разрешения символа, 41 - блок расчета формы маркируемого символа, 42 - блок верификации машиночитаемого кода, 43 - блок расчета траектории и базовых параметров логического уровня 1, 44 - блок оценки работоспособности маркиратора и качества выполнения текущего задания, 45 - блок инициализации оптического модуля распознавания и декодирования символа машиночитаемого кода, 46 - блок инициализации оптической насадки, 47 - блок долговременной памяти, 48 - блок геолокации, 49 - пользователь/оператор комбинированного устройства.
Функционирование и построение комбинированного устройства маркировки и верификации с универсально-распределенной гибридной системой управления, проиллюстрированное на фиг. 1, начинается с определения количества задействованных осевых проводов маркиратора, в которых необходимо позиционировать исполнительный(ые) механизм(ы), их тип и количество, обычно их 2-ве, это ось X и ось Y, но может быть и 4-ре, добавляются оси R (вращения детали) и ось Z (изменения высоты профиля детали). Для упрощения на фиг. 1 изображена схема, где указаны только два осевых привода. При определении типа размещения, конструкционных особенностей расположения приводов и исполнительных механизмов маркиратора, выбирается тип шины 36 двухпроводного интерфейса связи логических уровней. Функционирование логического уровня 37 осуществляется на платформе любого существующего планшета или смартфона, с применением или без дополнительных устройств. В зависимости от действий оператора 47, вводимых в систему посредством управляющего воздействия на блок 38, базовое устройство управления логического уровня 2 вычисляет необходимые параметры траектории маркируемых символов и базовые параметры позиционирования и движения каждой оси, посредством работы блоков 39, 40, 41 и 43, которые посредством ресурсов шины связи 36 поступают только в нужные устройства управления логического уровня 1. По полученным базовым параметрам устройство управления 1 соответствующего привода в блоках 4, 5 и 14, 15 вычисляет собственную систему координат и изменение скорости движения в зависимости от типа разрешения и механической конструкции приводного механизма. В итоге на обмотках соответствующих шаговых двигателей 8 и 18, блоки 6 и 16 формирует дискретные последовательности импульсов, оптимальные по значению тока, перемещая привод в нужную позицию. Если в течении контрольного интервала времени по шине 8 в соответствующее устройство 1 не поступает никаких сообщений, блоки 6 и 16 снижают рабочее значение тока на обмотках шаговых двигателей 8 и 18 до минимально допустимого типу конструкции значения. При достижении нужной очередной позиции, согласно траектории формы символа, блоки 3 и 13 на прямую формирует сигнал активации исполнительных механизмов 7 и 17. В отдельном случае блоки 3 и 13 формирует сигналы дополнительному мультиплексору или блоку реле, которые в свою очередь активируют, или отдельный соответствующий механизм, или 7. или 17, или их. Обработка позиционирования продолжается устройствами 2 и 12 до окончания текущего задания. Обратная связь организуется в форме обработки сигналов, как датчиков самого привода 10 и 20, так и от соответствующих дополнительных датчиков 11 и 21, которые могут устанавливаться в исполнительных механизмах маркиратора. Оценка работы привода осуществляется блоками 9 и 19 по результатам работы блоков вычислителей и сигналам датчиков 10, 11, 20 и 21, и в случае нарушений или срабатывании/несрабатывании соответствующих датчиков блоки 9 и 19 формируют сигнал для логического уровня 2, который выдают на шину 36. Любые сообщения поступившие по шине 8 из логического уровня 1, адресованные соответствующему устройству 2 и правильно принятые, подтверждаются обратным откликом, формируемым блоком 9 и 19. Общую оценку работоспособности маркиратора и качество выполнения текущих заданий на маркировку выполняет блок 44, выдавая уведомления пользователю в случае каких-либо нарушений, через блок 10, если ошибку невозможно ликвидировать корректировкой базовых параметров. Так же, блок 44 инициализирует процессы верификации отмаркированного символа машинного кода, через блок 45, который посредством шины 36, активирует один или несколько модулей оптического считывания машинного кода 22, в котором блок 24 активирует внутренние компоненты оптического модуля, и исходя из степени освещенности, зарегистрированной фотодатчиком 29, выбирает соответствующие параметры работы фотосенсора 23, настраивая его под оптимальный контраст изображения. Блок оценки качества изображения 26, по данным от фотосенсора 23, или по данным от лазерного дальномера высчитывает соответствующую фокусную позицию линзы 27, настраивая лучший контраст, через устройство позиционирования линзы 28. Полученное цифровое изображение поступает в блок 25 для цифровой фильтрации и обработки, результат обработки в форме цифрового массива данных передается в блок декодирования 30. Декодированный результат от блока 30, через шину 36 поступает в блок верификации машиночитаемого кода 42, где сравнивается с исходной кодируемой информацией. Итог верификации выдается посредством блока 38 пользователю 49 и в блок долговременной памяти 47. Так же, в блок долговременной памяти 47 и пользователю, через интерфейсный блок 38 поступают геолокационные данные от блока 48. В случае низкого процента совпадения кода, или не поступления никаких декодируемых данных по завершению маркировки, блоком 46, через шину 36 инициализируется оптическая насадка и модулей оптического считывания машинного кода 22. В ходе инициализации оптической насадки блок активации 32, выбирает режимы требуемой подсветки. В соответствии с частотой инициализации насадки за контрольный период времени, блок 33 пересчитывает параметры подсветки в рамках предустановленных алгоритмов, формируя управляющие воздействия на схему 34 аналогового импульсного управления светодиодной сборкой 35.
В качестве примера использования комбинированного устройства маркировки и верификации с универсально-распределенной гибридной системой управления можно привести примеры из начальной части описания, а так же промышленное применение для сертификационной маркировки труб большого диаметра для нефтегазопроводов, где необходимо однозначно соотносить сертификат качества, как с самой трубой, так и контрольным темплетом, полностью исключая "человеческий-фактор". Соответственно, если использовать устаревшие способы маркировки и верификации необходимо будет применять нескольких независимых устройств: одно для нанесения ударно-точечной маркировки, другое для считывания маркировки, и третье для верификации и учета результатов поверки, что технологически усложняет процесс изготовления, снижает производительность и поднимает себестоимость, и главное не исключает оператора от необходимости ввода учитываемых данных. В случае применения настоящего изобретения, становится технически возможным все устройства объединить в одно и выполнить маркировку и верификацию в одной технологической операции с минимальными временными затратами.
Другим примером использования, является промышленное применение различной маркировки на разных участках изготовления отдельных высокоответственных узлов компонентов, тележек железнодорожных вагонов или агрегатов авиационно-космических аппаратов, где необходимо маркировать машиночитаемые коды, как способом ударно-точечного выбивания на металлических деталях, так и способом лазерного термического окисления поверхности пластиковых деталей, с условием, что в коде закодированы эксплуатационные данные производителя. При использовании устаревших способов управления, выполнение данных технологических операций тоже требует нескольких отдельных типов устройств, которые функционируют на своих собственных программных и аппаратных методах управления, передачи и кодирования эксплуатационных данных производителя. К тому же, не обойтись без дополнительных затрат на адаптацию в информационные ресурсы предприятия, в том числе с применением отдельных устройств и программ сопряжения. В случае применения настоящего изобретения, становится технически возможным использовать только одно устройство, как для маркировки, так и для считывания и верификации результата, передавая учтенную информацию имеющимися стандартными средствами.
Еще одним примером использования, является промышленное применение маркировки в специализированных многофункциональных металлообрабатывающих центрах с числовым программным управлением (ЧПУ) со сменным инструментом, где требуется сложная специализированная маркировка обрабатываемого изделия без прерывания технологического цикла изготовления, например, при высокой точности и сложности изготовления, или высокой производительности. При использовании устаревших способов управления, это невозможно сделать, так как работа многофункциональных центров ЧПУ представляет функционирование замкнутой аппаратно-программной системы, которая не имеет простых технических и математических способов внедрить маркировку, а тем более оптическое считывающее устройство, без изменений, или конструкции, для обеспечения функциональности исполнительного узла маркиратора, или разработки дополнительных программных алгоритмов построения сложной траектории формы маркируемых символов, с последующей компенсацией погрешностей позиционирования для дальнейшей точной металлообработки. В случае применения настоящего изобретения, становится технически возможным использовать устройство маркировки, в рамках уже имеющейся базовой конструкции и программной функциональности центра ЧПУ, при условии применения шлюза-конвертера с беспроводным интерфейсом, например Bluetooth в CAN, что позволяет сделать комбинированное устройство маркировки и верификации отдельным инструментом центра ЧПУ, полностью автономно выполняющим свою функцию. Фактически для нанесения маркировки, в ходе высокоответственного цикла изготовления, не допускающего сложные программные переходы с потерей точности, центр ЧПУ производит только смену обрабатывающего инструмента на соответствующее комбинированное устройство, которое самостоятельно выполняет маркировку посредством собственной системы позиционирования исполнительного узла, без движений приводов центра ЧПУ, получив все настройки от отдельного компьютера, не связанного с центром ЧПУ, по соответствующему беспроводному интерфейсу и оптически считывает и верифицирует результат, сохраняя все данные. Главным необходимым требованием работы такого решения в настоящем изобретении, является применение соответствующего аккумуляторного автономного электропитания, при условии, что аккумулятор должен быть заряжен на момент применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНО-РАСПРЕДЕЛЕННАЯ ГИБРИДНАЯ СИСТЕМА УПРАВЛЕНИЯ МАРКИРАТОРАМИ С ОБРАТНОЙ СВЯЗЬЮ | 2017 |
|
RU2657919C1 |
| УНИВЕРСАЛЬНО-РАСПРЕДЕЛЕННАЯ ГИБРИДНАЯ СИСТЕМА УПРАВЛЕНИЯ КОЛЛАБОРАТИВНЫМ МНОГОЦЕЛЕВЫМ РОБОТОМ С МАШИННЫМ ЗРЕНИЕМ | 2018 |
|
RU2710709C1 |
| ВЕРИФИЦИРУЕМАЯ СИМВОЛЬНАЯ МЕТКА ПРЯМОГО НАНЕСЕНИЯ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2010 |
|
RU2445700C1 |
| УДАРНО-ТОЧЕЧНЫЙ СПОСОБ ПРЯМОГО НАНЕСЕНИЯ ПОМЕХОЗАЩИЩЕННЫХ СИМВОЛЬНЫХ МЕТОК И УСТРОЙСТВО ДЛЯ ИХ СЧИТЫВАНИЯ И ДЕКОДИРОВАНИЯ | 2013 |
|
RU2528086C1 |
| Устройство и способ нанесения маркировки | 2019 |
|
RU2715462C1 |
| ФЛУОРЕСЦЕНТНАЯ ИНФОРМАЦИОННАЯ МЕТКА И СПОСОБЫ ЕЕ ИЗГОТОВЛЕНИЯ | 2009 |
|
RU2490709C2 |
| ПОЛИМЕРНАЯ КОМПОЗИЦИЯ, СПОСОБ ИЗГОТОВЛЕНИЯ МЕТКИ ПРЯМОГО НАНЕСЕНИЯ С ПОЛИМЕРНОЙ КОМПОЗИЦИЕЙ И МЕТКА ПРЯМОГО НАНЕСЕНИЯ | 2013 |
|
RU2538580C1 |
| СПОСОБ ЛАЗЕРНОЙ МАРКИРОВКИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2825967C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ, В ТОМ ЧИСЛЕ ВОССТАНОВЛЕНИЯ, ФЛУОРЕСЦЕНТНОЙ МАРКИРОВКИ ПРЯМОГО НАНЕСЕНИЯ | 2014 |
|
RU2609912C2 |
| ПОЛИМЕРНАЯ КОМПОЗИЦИЯ, СПОСОБ ИЗГОТОВЛЕНИЯ МАРКИРОВКИ ПРЯМОГО НАНЕСЕНИЯ С ПОЛИМЕРНОЙ КОМПОЗИЦИЕЙ И МАРКИРОВКА ПРЯМОГО НАНЕСЕНИЯ | 2013 |
|
RU2550179C1 |
Изобретение относится к средствам маркировки изделий и оптического считывания и декодирования символов машиночитаемых штриховых кодов различного типа, в которых посредством прецизионных приводных механизмов позиционирования исполнительного узла по заданной траектории производится регулируемое дискретное соответствующее воздействие на маркируемый материал в нужный момент и последующая верификация получившегося символа с исходной кодируемой информацией. Комбинированное устройство интрузивной маркировки и верификации символов машиночитаемых кодов прямого нанесения и люминесцентных символов и изображений может быть использовано для экономически эффективного, доступного, удобного и простого выполнения промышленной маркировки интрузивным методом при непосредственном считывании и верификации результата, в тех же условиях как в рамках одного самостоятельного технологического процесса, так и при реализации встраиваемых решений по маркировке в сложные производственные линии или металлообрабатывающие центры с числовым программным управлением, без изменения их функциональности. 1 ил.
Комбинированное устройство интрузивной маркировки и верификации символов машиночитаемых кодов прямого нанесения и люминесцентных символов и изображений, включающее вычислительные устройства первого и второго логических уровней, работающих параллельно и разделяющих процессы вычисления на вычислительные устройства первого уровня, предназначенные для вычислений системы координат в блоке расчета и настройки координат осей проводов маркиратора, изменения скорости движения в зависимости от типа разрешения и конструкции приводов маркиратора в блоке расчета и настройки параметров скорости, фаз замедления и ускорения осей маркиратора, при перемещении приводами исполнительных механизмов в нужную позицию, вычисляют оценку фактов наступления этого события с активацией управляющих выходов при достижении очередной позиции согласно траектории формы символа и формируя сигнал активации исполнительных механизмов, распознавания цифровых видеоизображений в блоке цифровой фильтрации и обработки цифрового изображения с декодированием машиночитаемых кодов в блоке декодирования машинного кода, по отдельности и их совместных комбинаций, управление оптическими элементами автофокусировки, светодиодной подсветки и компонентами возбуждения люминесцентного покрытия/заполнения осуществляется в блоке схемы аналогового импульсного управления элементами подсветки, возбуждения люминесценции, вычислительные устройства второго уровня, предназначенные для вычисления параметров траектории маркируемых символов и базовых параметров их позиционирования и движения каждой оси маркиратора, осуществляют в блоках расчета расположения элементов символа в соответствующих осях маркиратора, расчета разрешения символа, расчета формы маркируемого символа и в блоке верификации машиночитаемого кода, с результатом декодирования в блоке инициализации оптического модуля распознавания и декодирования символа машиночитаемого кода, при этом вычислительные устройства управления первого логического уровня совместно с вычислительными устройствами второго логического уровня образуют гибридное устройство управления таким образом, что каждый привод маркиратора и оптический модуль считывания и подсветки кодов работают независимо друг от друга со своим устройством управления, в котором гибридные устройства управления приводом с устройством интерфейсной связи, блоком оценки работоспособности, электрическими схемами сопряжения с датчиками и активации управляющих выходов исполнительных узлов маркиратора располагают или на шаговом двигателе соответствующего привода маркиратора стандарта мотор опор NEMA, или в непосредственной близости от него, а устройство оптического считывания, декодирования и подсветки машиночитаемых кодов располагают или а маркираторе, или совместно с устройством управления второго логического уровня, где в качестве устройства управления второго логического уровня используют как компьютер, планшетный компьютер, так и коммуникатор/смартфон, предназначенные для вычисления базовых параметров траектории и позиционирования приводов маркиратора, а также настроек оптических элементов обработки цифровых изображений, автофокусировки, подсветки и возбуждения люминесценции символа, и передачи их в соответствующие устройства управления первого логического уровня, которые управляются устройствами второго логического уровня по схеме ведущий-ведомый, с реакцией ведомого, взаимодействуя между собой по адресным интерфейсам на основе двухпроводных шин связи, причем в первом логическом уровне блоки оценки работоспособности узлов каждого привода маркиратора и блоки декодирования символов машиночитаемого кода обрабатывают как сигналы соответствующих датчиков, так и цифровое изображение, соответственно, и передают как уведомления, так и результат декодирования, через указанные интерфейсы связи логических уровней в вычислительное устройство второго логического уровня, с подтверждением обратного отклика, а обратная связь между первым и вторым логическими уровнями реализуется с помощью аппаратных прерываний вычислительного устройства соответствующего уровня, при которых с помощью принудительного прекращения исполнения любых команд, выполняемых до момента поступления прерывания от другого логического уровня, активируют прием сообщения, после исполнение незавершенной команды возобновляется с прерванного места, при этом все итоговые данные о времени верификации отмаркированного символа кода сохраняют в устройстве управления второго логического уровня на длительный период времени с фиксацией геолокации или без нее.
| УНИВЕРСАЛЬНО-РАСПРЕДЕЛЕННАЯ ГИБРИДНАЯ СИСТЕМА УПРАВЛЕНИЯ МАРКИРАТОРАМИ С ОБРАТНОЙ СВЯЗЬЮ | 2017 |
|
RU2657919C1 |
| CN 204622836, 09.09.2015 | |||
| US 6135022, 24.10.2000 | |||
| US 6435742, 20.08.2002. | |||

