Область техники, к которой относится изобретение
Настоящее изобретение относится к преодолению влияния низкочастотных шумов в радиолокационной системе.
Уровень техники
В автомобильных транспортных средствах может быть использована радиолокационная система для выполнения различных функций. Например, радиолокационная система позволяет обеспечить работу элементов систем безопасности, таких как предупреждение о столкновении и адаптивный круиз-контроль. Эффективность таких систем может зависеть от качества работы радиолокационной системы. Принцип работы радиолокационной системы основан на распространении электромагнитной волны, отражающейся от объекта и возвращающейся назад на радиолокационный приемник. Отраженный сигнал может быть смещен по частоте относительно передаваемого сигнала. Используя смеситель, радиолокационное электронное оборудование может генерировать сигнал, соответствующий разнице частот между передаваемым и принимаемым сигналом. Затем значение разности частот может быть обработано таким образом, чтобы вычислить дальность и относительную скорость объекта.
Гомодинный приемник может преобразовывать радиолокационный сигнал с понижением частоты прямо до основной полосы частот без предварительного преобразования сигнала до промежуточных частот. Наличие эхосигналов от неподвижного объекта (без доплеровского эффекта), находящегося при нулевом или почти нулевом расстоянии, может привести к получению сигналов постоянного тока или частотных сигналов «почти» постоянного тока в основной полосе. Сигналы утечки и шумов высокого уровня и широкий разброс по частоте, вызванные фазовым шумом гетеродина, могут подавлять низкочастотные (при близком расстоянии) эхосигналы и эхосигналы постоянного тока.
Шумы, вызванные гомодинным преобразованием с понижением частоты, могут, в основном, представлять собой шумы, вызванные смещением постоянного тока (иногда называемым смещением смесителя). Такое смещение вносит вклад в шумы типа 1/f, 1/f2 и 1/f3. Данный шум (в дополнение к собственному шуму устройства в случае 1/fn составляющих) может быть вызван реакцией одинаковых или почти одинаковых частотных составляющих в смесителе, выполняющем преобразование с понижением частоты, и фазовым шумом самих сигналов. Сигналы потери местного гетеродина приемника (LO) и радиочастотные (RF) сигналы могут смешиваться в постоянный ток. Также при недостаточно точном согласовании частот может наблюдаться внутреннее отражение сигнала утечки от портов смесителя.
Приемопередающая антенна может иметь коэффициент развязки, превышающий 50 дБ, а эхосигналы радиолокационного устройства могут быть ниже уровня передачи более чем на 50 дБ. Уровень потерь в смесителе может быть примерно на 20-25 дБ ниже уровней сигналов гетеродина. Уровень сигналов гетеродина в автомобильных радиолокационных устройствах для гомодинного смесителя может быть всего на 3-5 дБ ниже уровня передачи сигналов. Уровни эхосигналов для объектов, находящихся на небольшом расстоянии, ограничены спадом R4, обусловленным уравнением дальности радиолокационного устройства. Более того, эффективная площадь отражения (RCS) целевых объектов может быть физически ограничена величиной распределения в раскрыве антенны, которая может представлять собой очень малую область при небольшой дальности. Таким образом, сигналы утечки в смесителе могут подавлять эхосигналы от близких целевых объектов с низкой площадью отражения, которые характеризуются небольшим относительным движением или отсутствием относительного движения.
Пешеходы могут иметь очень небольшую площадь отражения и низкий доплеровский сдвиг. При небольшом расстоянии до пешехода отраженный эхосигнал может быть замаскирован шумом смещения смесителя. При движении в режиме с частыми остановками транспортное средство с радиолокационным устройством может следовать за целевым транспортным средством до его остановки. Проблемы могут возникать в тех ситуациях, когда целевое транспортное средство имеет небольшую площадь отражения (например, мотоциклы, некоторые автомобили). При приближении транспортного средства к такому целевому транспортному средству и снижении скорости движения эхосигнал от целевого транспортного средства может быть замаскирован смещением смесителя. Это может привести к снижению эффективности работы систем, использующих радиолокационную систему для обнаружения объектов.
Раскрытие изобретения
В настоящем изобретении предложен гомодинный приемник, содержащий смеситель, выполненный с возможностью принимать первый входной сигнал, основанный на передаваемом сигнале, и второй входной сигнал, основанный на принимаемом сигнале, и фазовращатель, выполненный с возможностью изменять фазу первого входного сигнала или второго входного сигнала на заранее заданное значение, причем выходная частота смесителя сдвигается на это заранее заданное значение. Фазовращатель может быть выполнен с возможностью обеспечивать изменение фазы первого входного сигнала на это заранее заданное значение. Гомодинный приемник может включать в себя ответвитель, выполненный с возможностью связывать передаваемый сигнал с первым входным сигналом, а фазовращатель может быть выполнен с возможностью обеспечивать изменение фазы первого входного сигнала на указанное заранее заданное значение. Фазовращатель может быть выполнен с возможностью обеспечивать изменение фазы второго входного сигнала на указанное заранее заданное значение. Гомодинный приемник может включать в себя малошумный усилитель, выполненный с возможностью обрабатывать принимаемый сигнал и выдавать второй входной сигнал, а фазовращатель может быть выполнен с возможностью обеспечивать изменение фазы второго входного сигнала на указанное заранее заданное значение. Указанное заранее заданное значение изменения фазы может представлять собой заранее заданную постоянную величину. Гомодинный приемник может включать в себя по крайней мере один контроллер, выполненный с возможностью дискретизировать (семплировать) выходную амплитуду смесителя, при этом частота дискретизации для выходной амплитуды смесителя может превышать максимальную ожидаемую выходную частоту смесителя.
Также предложен способ предотвращения возникновения шумов из-за смещения постоянного тока в гомодинном приемнике, в ходе которого изменяют фазу первого входного сигнала в смеситель на заранее заданную величину, смешивают первый входной сигнал и второй входной сигнал в смесителе и выдают выходной сигнал на частоте, сдвинутой на указанное заранее заданное значение таким образом, чтобы выходная амплитуда смесителя превышала соответствующую амплитуду шума. Изменение фазы первого входного сигнала может включать в себя добавление постоянной фазы к первому входному сигналу через заранее заданные временные интервалы. Заранее заданная величина может представлять собой заранее заданное постоянное значение. Первый входной сигнал может быть основан на передаваемом сигнале. Первый входной сигнал может быть основан на принимаемом сигнале.
Также рассматривается радиолокационная система, которая включает в себя гетеродин, выполненный с возможностью генерировать передаваемый сигнал, антенну, выполненную с возможностью передавать передаваемый сигнал и принимать принимаемый сигнал, а также гомодинный приемник, включающий в себя смеситель, выполненный с возможностью смешивать первый входной сигнал, основанный на передаваемом сигнале, и второй входной сигнал, основанный на принимаемом сигнале, и фазовращатель, выполненный с возможностью изменять фазу первого входного сигнала или второго входного сигнала на заранее заданное значение, причем выходная частота смесителя сдвигается на эту заранее заданную величину изменения фазы. Радиолокационная система может включать в себя по крайней мере один контроллер, выполненный с возможностью дискретизировать выходную амплитуду смесителя, при этом частота дискретизации выходной амплитуды смесителя превышает максимальное значение ожидаемой выходной частоты смесителя. Заранее заданное значение изменения фазы может быть выбрана таким образом, чтобы выходная амплитуда смесителя превышала соответствующее значение амплитуды шума на основной частоте. Заранее заданное значение изменения фазы может представлять собой заранее заданную постоянную величину. Фазовращатель может быть выполнен с возможностью изменять фазу первого входного сигнала на заранее заданную величину путем добавления постоянной фазы к первому входному сигналу с заранее заданными временными интервалами. Гомодинный приемник может быть выполнен с возможностью изменять фазу первого входного сигнала на заранее заданное значение. Гомодинный приемник может быть выполнен с возможностью изменять фазу второго входного сигнала на заранее заданное значение. Радиолокационная система может включать в себя ответвитель, выполненный с возможностью обеспечивать передачу передаваемого сигнала на антенну и обеспечивать связанный выходной сигнал на основании передаваемого сигнала, где первый входной сигнал может представлять собой связанный выходной сигнал.
Краткое описание чертежей
На Фиг. 1 представлена схема транспортного средства, включающего в себя усовершенствованную гомодинную радиолокационную систему.
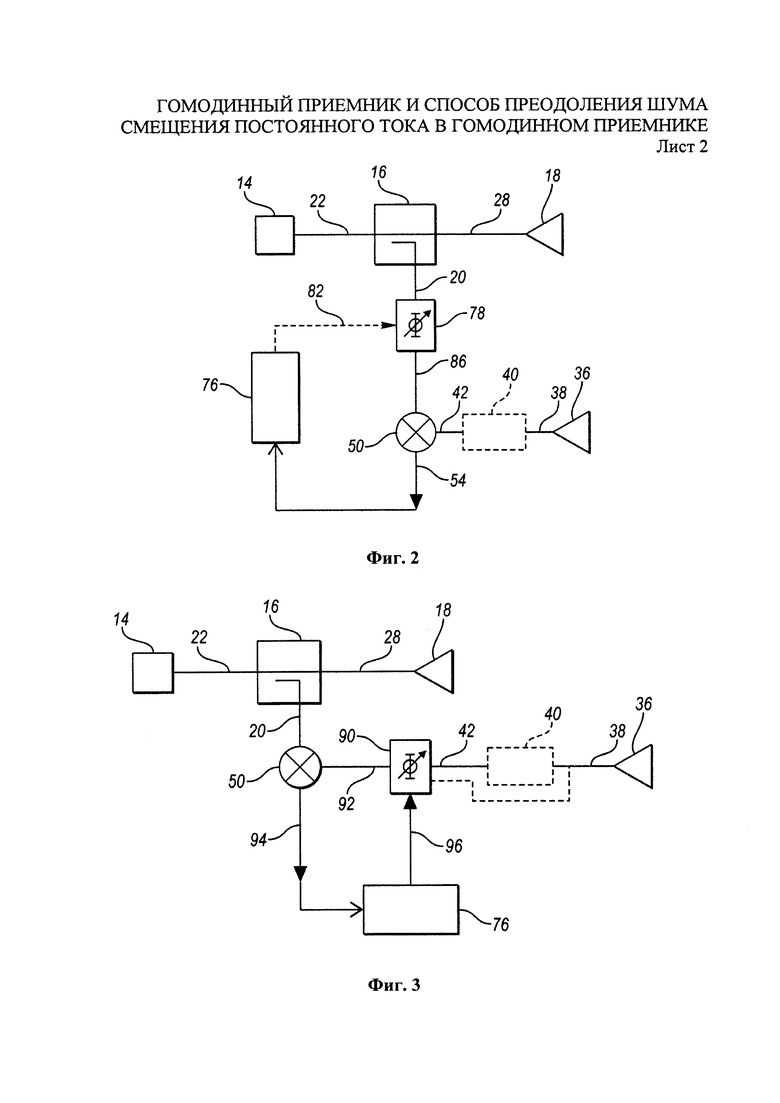
На Фиг. 2 представлена схема, иллюстрирующая возможную конфигурацию гомодинной радиолокационной системы, включающей в себя регулируемый фазовращатель, который используется для передаваемого сигнала.
На Фиг. 3 представлена схема, иллюстрирующая возможную конфигурацию гомодинной радиолокационной системы, включающей в себя регулируемый фазовращатель, который используется для принимаемого сигнала.
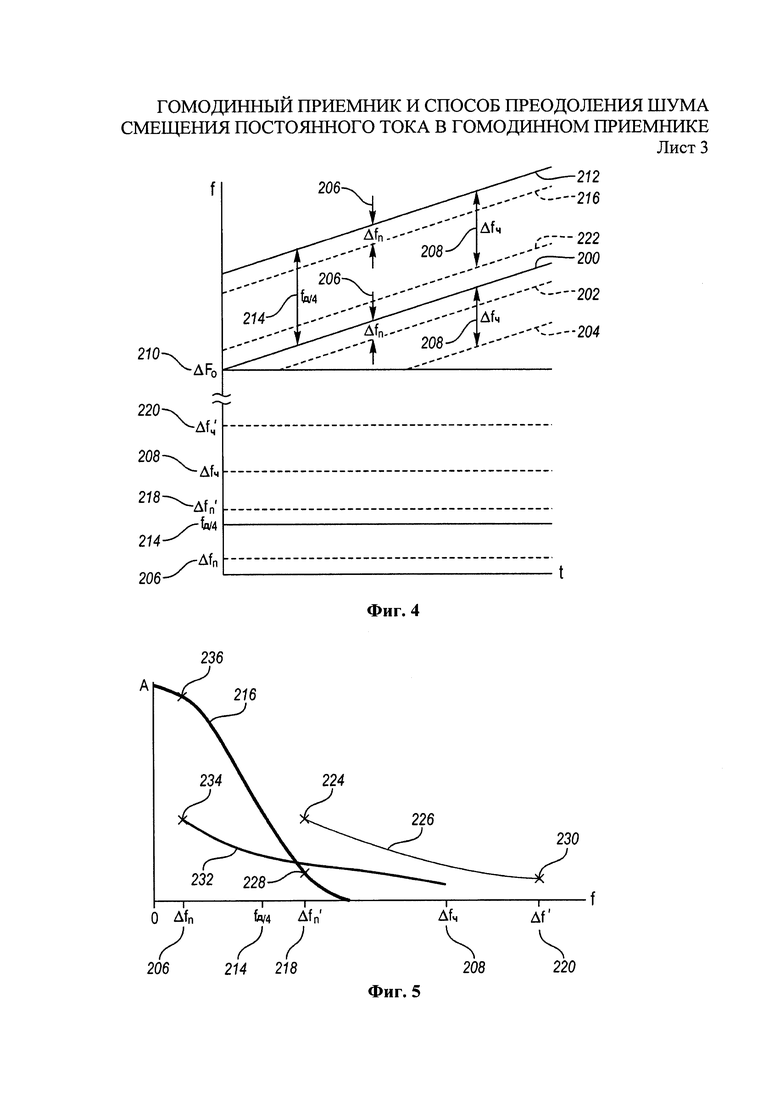
На Фиг. 4 представлен график, иллюстрирующий зависимости частоты от времени для гомодинной радиолокационной системы, которая включает в себя регулируемый фазовращатель.
На Фиг. 5 представлен график, иллюстрирующий зависимости амплитуды от частоты для гомодинной радиолокационной системы, которая включает в себя фазовращатель.
На Фиг. 6 представлена блок-схема способа предотвращения шумов смещения постоянного тока в гомодинной радиолокационной системе.
Осуществление изобретения
Далее представлено подробное описание вариантов осуществления изобретения. Описанные варианты приведены исключительно в качестве примеров, которые могут быть воплощены в различных формах. Фигуры необязательно выполнены в масштабе. Некоторые элементы могут быть увеличены или уменьшены с целью изображения деталей конкретных компонентов. Конкретные конструкционные и функциональные особенности, изложенные в данном описании, не должны рассматриваться как ограничение, и приведены лишь в качестве иллюстрации для ознакомления специалистов в данной области техники с вариантами реализации изобретения. Специалистам в данной области техники понятно, что различные признаки настоящего изобретения, изображенные и описанные со ссылкой на любую из фигур, могут быть объединены с признаками, изображенными на одной или нескольких других фигур, для получения вариантов осуществления настоящего изобретения, не указанных и не изображенных в явном виде. Сочетания признаков позволяют представить репрезентативные варианты осуществления для типичных применений. Однако в конкретных вариантах использования или применения может быть желательным выполнить различные комбинации и модификации признаков в соответствии с принципами и идеями настоящего раскрытия.
На Фиг. 1 представлен пример схемы гомодинной радиолокационной системы 12 с линейной частотной модуляцией (LFM) для транспортного средства 10. Гомодинная радиолокационная система 12 может быть выполнена с возможностью прямого преобразования частоты сигнала с понижением до уровня нулевой промежуточной частоты. Радиолокационная система 12 может генерировать электромагнитную волну 30 с определенной частотой и амплитудой. Управляемый напряжением гетеродин (Voltage Controlled Oscillator, VCO) 14 может быть выполнен с возможностью выдачи сигнала 22 с линейной частотной модуляцией (ЛЧМ-сигнала). Управляемый напряжением гетеродин 14 может включать в себя усилитель для выдачи передаваемого ЛЧМ-сигнала 22 с соответствующим уровнем мощности. ЛЧМ-сигнал 22 может представлять собой сигнал, частота которого изменяется с течением времени. Управляемый напряжением гетеродин 14 может генерировать ЛЧМ-сигнал 22, который линейно изменяется во времени, например, согласно уравнению f(t)=f0+γt. Частота ЛЧМ-сигнала 22 может повторяться в пределах постоянного диапазона частот. Частота ЛЧМ-сигнала 22 также может быть выбрана таким образом, чтобы она периодически увеличивалась и уменьшалась линейно в пределах некоторого частотного диапазона. Диапазон частот может быть обозначен как полоса частот (bandwidth, BW), и может быть равен разности между максимальным и минимальным значениями частот ЛЧМ-сигнала 22. Выходной ЛЧМ-сигнал 22 управляемого напряжением гетеродина может быть подан на ответвитель 16. Ответвитель 16 может позволять основному передаваемому сигналу 28 проходить к передающей антенне 18. Ответвитель 16 может пропускать большую часть энергии сигнала на передающую антенну 18. Ответвитель 16 также может предоставлять связанный сигнал 20, указывающий на частоту и амплитуду основного передаваемого сигнала 28. Для использования в схеме радиолокационного приемника связанный сигнал 20 может иметь почти такую же частоту, что и основной передаваемый сигнал 28. Основной передаваемый сигнал 28 может быть направлен на передающую антенну 18.
Передаваемый ЛЧМ-сигнал 28 может быть преобразован передающей антенной 18 в электромагнитную волну 30. Передаваемая волна 30 может быть описана следующим уравнением:

где f0 - частота ЛЧМ-сигнала 22, γ - скорость передачи ЛЧМ-сигнала, которая может быть обозначена как отношение ширины полосы частот импульса (BW) к длительности импульса передатчика (Ти).
Передаваемая электромагнитная волна 30 может проходить от антенны 18 и может отражаться при столкновении с объектом 32, находящимся на расстоянии R от радиолокационного устройства 12 и движущегося со скоростью и относительно радиолокационного устройства 12. Также может иметь место ситуация, когда на разных расстояниях от транспортного средства будет обнаружено несколько объектов 32, движущихся с разными скоростями относительно транспортного средства. При достижении объекта 32 электромагнитная волна 30 отражается обратно на радиолокационное устройство 12. Отраженная волна 34 может быть принята принимающей антенной 36. Хотя передающая антенна 18 и принимающая антенна изображены в виде отдельных антенн, для выполнения обеих функций может быть использована одна антенна. Отраженная волна 34 может иметь другие амплитуду, частоту и фазу по сравнению с передаваемой волной 30. Отраженная волна 34 может быть описана следующим уравнением:

где с - скорость света, а τ - задержка распространения сигнала, равная 2R/c.
Отраженная волна 34 может быть преобразована принимающей антенной 36 в электрический сигнал 38. Для увеличения амплитуды принимаемого сигнала 38 он может проходить через малошумящий усилитель (LNA) 40. Усилитель 40 может обеспечивать усиленный принимаемый сигнал 42. Для разделения принимаемого сигнала и его использования в разных частях схемы, усиленный принимаемый сигнал 42 может быть направлен через делитель 44 мощности принимаемого сигнала.
Связанный сигнал 20 может быть направлен на вход регулируемого фазовращателя 78. Фазовращатель 78 может быть выполнен с возможностью применять периодический сдвиг фазы ко входному сигналу 20, основанному на передаваемом сигнале. Выходной сигнал 86 фазовращателя 78 может быть направлен через опорный делитель 46 мощности (разветвитель), чтобы разделить опорную частоту для разных частей схемы. Первый выходной сигнал 48 опорного делителя 46 может быть направлен на вход смесителя 50. На второй вход смесителя 50 может быть направлен один выходной сигнал 52 из делителя 44 мощности принимаемого сигнала. Сигнал 52, основанный на принимаемом сигнале, может иметь частоту, отличную от частоты опорного сигнала 48 из-за скорости перемещения объекта 32 относительно радиолокационной системы 12 и удаленности от нее. Смеситель 50 может удалить частоту опорного сигнала 48 из принимаемого сигнала 52. Другими словами, в частотном диапазоне, частота опорного сигнала 48 может быть вычтена из частоты принимаемого сигнала 52. Выходной сигнал 54 из смесителя 50 может быть направлен через фильтр 56. Фильтр 56 может представлять собой фильтр низких частот, удаляющий высокочастотные составляющие из выходного сигнала 54 смесителя. Получающийся синфазный выходной сигнал 58 может иметь частоту, зависящую от скорости и дальности объекта 32, от которого отразилась волна.
В некоторых случаях второй выходной сигнал 60 опорного делителя 46 мощности может быть направлен через постоянный фазовращатель 62, который сдвигает фазу сигнала 60, основанного на передаваемом сигнале, на постоянную величину, равную 90 градусов. Опорный сигнал 64, фаза которого сдвинута на постоянную величину, может быть направлен на вход второго смесителя 66. На вход второго смесителя 66 также может быть направлен выходной сигнал 68 из делителя 44 мощности принимаемого сигнала. Второй смеситель 66 может удалять частоту опорного сигнала 64 со сдвинутой фазой из принимаемого сигнала 68. Выходной сигнал 70 второго смесителя может быть направлен через фильтр 72. Фильтр 72 может представлять собой фильтр низких частот. Данная конфигурация генерирует квадратурный выходной сигнал 74, который смещен по фазе на 90 градусов относительно синфазного выходного сигнала 58.
Синфазный сигнал 58 и квадратурный сигнал 74 могут быть направлены на контроллер 76. Контроллер 76 может включать в себя один или несколько аналого-цифровых преобразователей для выполнения дискретизации сигналов. Дискретизированные сигналы могут быть обработаны для определения амплитудного и частотного компонентов сигналов. Обработанные сигналы могут быть использованы для расчета дальности и относительной скорости объекта 32. Данные о расстоянии и относительной скорости могут быть использованы для выполнения функций предупреждения о столкновении (collision warning, CW), что позволит предупредить водителя о вероятном столкновении с объектом. Дополнительно, функции CW могут предусматривать выдачу тормозной системе команды на увеличение давления торможения для замедления транспортного средства и предотвращения столкновения. Обработанные сигналы также могут быть использованы для выполнения функций адаптивного круиз-контроля (АСС) по регулировке скорости транспортного средства в зависимости от расстояния до объекта и относительной скорости объекта. Система адаптивного круиз-контроля может управлять изменением движущего момента и тормозной системой для поддержания оптимальных значений расстояния и/или скорости. Например, при активной системе адаптивного круиз-контроля она сначала пытается установить скорость транспортного средства равной предпочтительному установленному значению. При обнаружении более медленно движущегося объекта перед транспортным средством система может изменить скорость транспортного средства таким образом, чтобы поддерживать заданное расстояние между объектом и транспортным средством на постоянном уровне. При замедлении находящегося впереди объекта транспортное средство может снизить скорость, чтобы сохранить безопасную дистанцию. При остановке объекта транспортное средство также может быть остановлено.
Гомодинные радиолокационные системы, известные из уровня техники, не включают в себя регулируемый фазовращатель 78. Известные гомодинные системы могут направлять связанный передаваемый сигнал 20 непосредственно на вход опорного делителя 46 мощности.
На Фиг. 2 представлен упрощенный пример гомодинной радиолокационной системы, в которой в тракт передачи основанного на передаваемом сигнале связанного сигнала 20 в гомодинной архитектуре добавлен фазовращатель 78. На Фиг. 2 представлена только синфазная часть гомодинной радиолокационной системы, однако приведенное ниже описание также относится и к квадратурной составляющей. Также фазовращатель 78 может быть установлен в тракт передающей антенны после удаления сжатого ЛЧМ-сигнала, однако это может привести к неприемлемому ослаблению передаваемого сигнала. Фазовращатель 78 может быть выполнен с возможностью периодического сдвига фазы входного сигнала 20, основанного на передаваемом сигнале.
Периодический сдвиг фазы может быть выбран линейным и выполняться с заданной степенью дискретизации. Степень дискретизации может соответствовать частоте дискретизации аналого-цифрового преобразователя. Частота связана со скоростью изменения или производной по времени от фазы (dφ/dt). Постоянное частотное смещение сигнала может быть введено в сигнал путем изменения фазы сигнала с постоянной скоростью (например, dφ/dt=К, где К - постоянная). Этого можно достичь за счет периодического выполнения корректировки фазы сигнала на постоянную величину. Частотное смещение может быть вычислено как Δφ*f/(2π), где Δφ - постоянная величина изменения фазы (в радианах), f - частота, при которой происходит регулировка фазы. В соответствии с одним примером постоянное значение увеличения фазы может быть выбрано равным nπ/2. Следует отметить, что в качестве постоянной величины увеличения фазы может быть выбрано любое значение, при этом общий принцип анализа не меняется. Постоянная величина изменения может быть установлена равной скорости дискретизации или частоте fд. После чего частотное смещение может быть вычислено как n fд/4.
Частотный сдвиг входного сигнала 20 может быть выполнено путем регулировки фазовращателя 78 таким образом, чтобы обеспечивать изменение фазы входного сигнала 20 на заранее заданное значение. Частотное смещение зависит от величины изменения фазы. Следовательно, постоянное смещение фазы может быть достигнуто за счет добавления постоянной величины изменения фазы с заранее заданным временным интервалом (например, значения частоты дискретизации выходного сигнала смесителя без смещения). Частотное смещение может быть выбрано таким образом, чтобы амплитуда выходного сигнала 54 смесителя превышала соответствующую амплитуду шума при заданной частоте.
Например, путем выбора периодического сдвига фазы равным π/2 (т.е. при каждой дискретизации к сигналу, проходящему по тракту, добавляется π/2) частотное смещение может составлять одну четвертую от частоты дискретизации fд. Для получения других значений частоты смещения могут быть использованы другие значения дифференциального фазового сдвига. Более того, может быть использована другая частота добавления постоянного значения фазы. Результирующий частотный сдвиг сигнала основной полосы частот может потребовать увеличения частоты дискретизации аналого-цифрового преобразователя в контроллере 76, что обеспечит достижение удовлетворительного уровня дискретизации при максимальном значении частоты в полосе.
В соответствии с данным примером после прохождения передаваемого сигнала 20 через регулируемый фазовращатель 78 частота выходного сигнала 86 может быть равна сумме f+fд/4, где f - частота гетеродина. При отсутствии регулируемого фазовращателя частота сигнала 86 будет равна частоте сигнала 22 гетеродина f. При использовании регулируемого фазовращателя частота сигнала 20 местного гетеродина может быть сдвинута на величину, равную fд/4. Затем частота выходного сигнала 54 смесителя может быть вычислена как сумма fд/4+Δf, где Δf - разность частот передаваемого сигнала и отраженного сигнала. Контроллер 76 может быть выполнен с возможностью дискретизации выходного сигнала 54 смесителя 50. Контроллер 76 также может быть выполнен с возможностью корректировки фазы фазовращателя. Контроллер 76 может выдавать выходной сигнал 82, который может представлять собой величину корректировки фазы для фазовращателя 78. Выходной сигнал 82 может обновляться с определенной частотой для поддержания величины изменения фазы на постоянном уровне. Фазовращатель 78 может быть аналоговым или цифровым. Для управления аналоговым фазовращателем контроллер 76 может быть выполнен с возможностью выдачи выходного сигнала 82, который имеет переменное напряжение. Для управления цифровым фазовращателем контроллер 76 может быть выполнен с возможностью выдачи цифрового выходного сигнала или сигналов 82.
Эхосигналы радиолокационного устройства могут представлять собой копии передаваемого сигнала в пределах определенного диапазона частот с временной задержкой приема и другой амплитудой. Сжатие ЛЧМ-сигналов при помощи гомодинного устройства позволяет создать разницу между частотой передаваемого сигнала и частотой эхосигнала в диапазоне частот. Задержка эхосигнала преобразовывает расстояние до целевого объекта в постоянную частоту. Желаемая полоса зависит степени линейной частотной модуляции сигнала, максимального рассматриваемого расстояния и ожидаемой максимальной доплеровской частоты. Наличие эхосигналов от неподвижного объекта (без доплеровского эффекта) при нулевом или почти нулевом расстоянии может привести к получению сигналов постоянного тока или частотных сигналов «почти» постоянного тока в основной полосе сигналов (т.е. с нулевой промежуточной частотой). Сигналы утечки и шумов высокого уровня и широкий разброс по частоте, вызванные фазовым шумом гетеродина, могут маскировать низкочастотные (при близком расстоянии) эхосигналы и эхосигналы постоянного тока (с постоянным смещением).
На Фиг. 4 представлен пример частотного эхосигнала для гомодинной радиолокационной системы при небольшом и большом расстоянии до объекта. Частоты передаваемого и принимаемого сигналов могут быть изображены в виде функции зависимости от времени. Выходная частота передатчика может линейно изменяться во времени. Изменение частоты передаваемого сигнала во времени изображено в виде линии 200, начинающейся от базового значения F0 (210) и линейно возрастающей. Эхосигнал 202 для объекта, расположенного на небольшом расстоянии, может иметь частотную характеристику, очень похожую на частотную характеристику передаваемого сигнала 200, однако имеющую частотное смещение Δfn (206) относительно передаваемого сигнала 200 в определенный момент времени. Эхосигнал 204 для объекта, находящегося на большом расстоянии, может иметь частотную характеристику, аналогичную частотной характеристике передаваемого сигнала 200, однако имеющую частотное смещение Δfч (208) относительно передаваемого сигнала 200 в определенный момент времени. Следует отметить, что частоты эхосигнала 202 для объекта, находящегося на небольшом расстоянии, и эхосигнала 204 для объекта, находящегося на большом расстоянии, могут линейно изменяться во времени так же, как и частота передаваемого сигнала 200.
Выходной сигнал регулируемого фазовращателя (78, Фиг. 1) может быть представлен в виде кривой 212, характеризующей смещенную основную частоту. Частота может быть смещена на постоянное значение fд/4 (214) относительно передаваемого сигнала 200. Сигнал 202 для объекта, находящегося на небольшом расстоянии, который смещен на величину Δfn (206) относительно передаваемого сигнала 200, может в результате дать профиль 216, характеризующий выходную частоту фазовращателя, который смещен относительно профиля 212 основной частоты, на величину Δfn (206) в определенный момент времени. После преобразования с понижением частоты итоговая выходная частота может представлять собой 

На Фиг. 5 изображены значения амплитуды частотных составляющих. Значения амплитуды частотных составляющих преобразованных эхосигналов можно представить в виде графика зависимости от частоты. Амплитуду 216 шума постоянного тока также можно представить в виде графика зависимости от частоты. Амплитуда 216 шума постоянного тока может быть представлена для относительно малого диапазона частот. Также показан амплитудный профиль 232 для гомодинного приемника, известного из уровня техники. Также изображен амплитудный профиль 226 для гомодинного приемника с регулируемыми фазовращателями.
Для амплитудного профиля 232 для известных систем хорошо видно, что при частоте Δfn (206) для объекта, находящегося на небольшом расстоянии, амплитуда 234 принимаемого сигнала может быть меньше амплитуды 236 шума. В диапазоне частот, в котором амплитуда 216 смещения из-за шума постоянного тока превышает амплитуду 232 эхосигнала, целевые эхосигналы могут быть неотличимы от шумов. При таких низких частотах эхосигналы нельзя отличить от шумов. Следовательно, эффективность радиолокационной системы при обнаружении объектов, находящихся на небольшом расстоянии, может быть ограничена. При более высоких частотах, выше амплитуды шума постоянного тока, например, при Δfч (208), низкочастотные шумы не искажают амплитуду сигнала.
Амплитудный профиль 226 для усовершенствованного гомодинного приемника решает данную проблему за счет смещения амплитудного профиля эхосигналов без смещения характеристик постоянного тока. Амплитудный профиль 226 для составляющих выходной частоты эхосигналов с фазовым сдвигом может быть представлен в виде функции от частоты. Выходной сигнал с фазовым сдвигом для сигнала от объекта, находящегося на небольшом расстоянии, может быть смещен по частоте до 


На Фиг. 3 изображена альтернативная конфигурация, в соответствии с которой регулируемый фазовращатель 90 помещен в тракт 38 принимающей антенны. Входной сигнал фазовращателя 90 может быть выходным сигналом малошумящего усилителя 40. При отсутствии малошумящего усилителя 40 принимаемый сигнал 38 от антенны может поступать на вход фазовращателя 90. Размещение фазовращателя 90 после малошумящего усилителя (LNA) 40 может негативно отразиться на картине шумов в системе. Аналогичный анализ может быть выполнен для других результирующих форм волны.
Преимущество добавления регулируемого фазовращателя в систему гомодинного приемника заключается в том, что амплитуды сигналов в этом случае могут превышать амплитуду низкочастотных шумов. Это позволит повысить точность обнаружения объектов, находящихся на небольшом расстоянии, поскольку в этом случае смещенные эхосигналы легко могут быть отличены от шумов. Использование регулируемого фазовращателя позволяет сохранить гомодинную архитектуру системы без необходимости использования более сложных или дорогостоящих гетеродинных приемников.
Из-за смещения ожидаемого диапазона частот может быть желательно модифицировать степень дискретизации итогового сигнала. В качестве примера предположим, что исходная частота дискретизации в 5/4 раз больше максимальной ожидаемой частоты для исходной гомодинной архитектуры. Если максимальная ожидаемая частота для исходной архитектуры равна Δfч, то для достижения удовлетворительного уровня дискретизации сложных эхосигналов может быть выбрана частота дискретизации, равная 5Δfч/4. Предположим, что величина сдвига фазы, равная nπ/2, последовательно добавляется к сигналу, основанному на передаваемом сигнале, при помощи фазовращателя. Как было сказано выше, в этом случае частоты будут смещаться на заранее заданную величину. В связи с этим может понадобиться увеличить частоту дискретизации нового сигнала, чтобы компенсировать наличие повышенных частот.
В качестве новой частоты дискретизации fдн для сигналов основной полосы со смещенной частотой может быть выбрано значение, в 1,5 раза превышающее исходную частоту дискретизации fд. Это приведет к передвижению частоты сигнала объекта на минимальном расстоянии вверх на 0,375 (Δfn+fдн/4=Δfn+3fд/8) от исходной частоты дискретизации. Предполагая, что частота сигнала от объекта на минимальном расстоянии равна 0 Гц, самая низкая частота передвигается на величину, равную 0,375 от исходной частоты дискретизации. Это может позволить поднять значение самой низкой интересующей частоты за пределы диапазона шумов постоянного тока.
Самая высокая интересующая частота в спектре основной полосы частот для сигнала целевого объекта также сдвигается вверх на 0,375 от исходной частоты дискретизации. Соотношение между самой высокой частотой и новой частотой дискретизации fдн равно 47/60. Новая частота дискретизации fдн больше самой высокой частоты в сложном спектре не более чем в 1,25 раз, благодаря чему достигается удовлетворительный уровень дискретизации данного спектра.
Как показано на Фиг. 2, регулировку фазы можно выполнить при новой частоте дискретизации fдн. Контроллер 76 может выполнить дискретизацию выходных сигналов 54 смесителя при новой частоте дискретизации. Кроме того, контроллер 76 может применить фазовую корректировку 82 для фазовращателя 78 при той же частоте. Аналогичным образом, как показано на Фиг. 3, контроллер 76 может быть выполнен с возможностью считывать выходной сигнал 94 смесителя и выдавать сигнал 96 на фазовращатель 90, чтобы отрегулировать фазу.
Представленная конфигурация характеризуется добавлением фазовращателя 78, выполненного с возможностью изменять фазу сигнала на определенную величину. Величина изменения фазы приводит к частотному смещению сигнала. В ветви для квадратурного сигнала с Фиг. 1 также показан дополнительный фазовращатель 62. Этот фазовращатель 62 предназначен для выдачи квадратурного выходного сигнала, смещенного по фазе на девяносто градусов относительно несмещенного сигнала. Результат добавления постоянного значения фазы к сигналу представляет собой сигнал с той же частотой, отстающей или опережающей исходную частоту на определенную величину. Фазовращатель 62 выполнен с возможностью сдвига фазы сигнала на постоянную величину, но не изменяет частоту сигнала. Фазовращатель 78 выполнен с возможностью применять определенную величину для изменения фазы, что позволяет эффективно регулировать частоту сигнала.
На Фиг. 6 представлена блок-схема способа работы гомодинной радиолокационной системы. Алгоритм 300 работы системы может быть запущен при включении питания системы или зажигания. На этапе 302 радиолокационное устройство может генерировать передаваемый сигнал. После передачи сигнала может быть принят отраженный сигнал. На этапе 304 радиолокационная система может принять и отфильтровать отраженный сигнал. Фильтрация может включать в себя усиление принимаемого сигнала. На этапе 306 фаза сигнала, основанного на передаваемом сигнале, может быть изменена на заранее заданное значение. Сдвиг фазы может привести к сдвигу частот смешанных сигналов до уровня, превышающего уровень шумов постоянного тока. Затем на этапе 308 система может преобразовывать сигналы с понижением частоты до частот основной полосы. После этого на этапе 310 контроллер может обрабатывать преобразованный сигнал с пониженной частотой для расчета дальности и скоростей объектов в области действия радиолокационного устройства. На этапе 312 система может повторно выполнить данный способ или завершить его выполнение при наличии условий для выключения. Описанный способ может быть выполнен при помощи схем аппаратных средств и микропроцессорного контроллера.
Раскрытые в настоящем документе процедуры, способы или алгоритмы могут быть выполнены или реализованы при помощи устройства обработки, контроллера или компьютера, которые могут включать в себя любое существующее программируемое электронное устройство управления или специализированное электронное устройство управления. Аналогичным образом процедуры, способы или алгоритмы могут храниться в виде различных данных и инструкций, выполняемых контроллером или компьютером, включая, но не ограничиваясь этим, информацию, постоянно хранящуюся на носителях без возможности перезаписи, таких как постоянные запоминающие устройства (ROM), и информацию, временно хранящуюся на носителях с возможностью перезаписи, таких как гибкие диски, магнитные ленты, компакт-диски (CD), оперативные запоминающие устройства (RAM), а также другие магнитные и оптические носители. Процедуры, способы или алгоритмы также могут представлять собой программные объекты. В качестве альтернативы процедуры, способы или алгоритмы могут быть полностью или частично записаны с помощью соответствующих аппаратных компонентов, таких как специализированные интегральные микросхемы (ASIC), логические микросхемы, программируемые пользователем (FPGA), конечные автоматы, контроллеров или другие аппаратные компоненты или устройства, а также сочетания аппаратных, программных и микропрограммных компонентов.
Хотя выше приведены иллюстративные примеры вариантов осуществления полезной модели, это не означает, что они описывают все возможные формы, ограниченные пунктами формулы. Конкретные термины использованы исключительно в описательных целях и не являются ограничивающими, и следует понимать, что возможно внесение различных изменений без отступления от объема и сущности предложенного решения. Как было описано выше, характеристические признаки различных вариантов осуществления могут быть объединены для создания других вариантов, не описанных и не изображенных в явном виде. Хотя различные варианты могли быть описаны как предпочтительные или имеющие преимущества перед другими вариантами реализации или применения, известными из уровня техники, по одному или нескольким выборочным параметрам, специалисты в данной области техники поймут, что для достижения общих желаемых характеристик, которые зависят от конкретного варианта применения или реализации, одним или более признаками или характеристиками можно пренебречь. Данные характеристики включают в себя стоимость, прочность, долговечность, затраты за срок службы, пригодность к реализации, внешний вид, упаковку, размер, пригодность к применению, вес, технологичность, простота сборки и т.д. Таким образом, описанные варианты, как минимум, являются предпочтительными по сравнению с другими вариантами реализации или использования, известными из уровня техники, по одной или более характеристикам, не выходящим за пределы объема сущности полезной модели, и могут быть предпочтительными для конкретного варианта применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНО-ПЕРЕДАЮЩЕЕ УСТРОЙСТВО ГОМОДИННОГО РАДИОЛОКАТОРА | 2000 |
|
RU2189055C2 |
| Приёмо-передающее устройство гомодинного радиолокатора | 2021 |
|
RU2787976C1 |
| Интерферометрический гомодинный радиолокатор | 2018 |
|
RU2689397C1 |
| ГОМОДИННЫЙ РАДИОЛОКАТОР | 2015 |
|
RU2626405C2 |
| ГОМОДИННЫЙ РАДИОПРИЕМНИК | 2000 |
|
RU2241310C2 |
| Гомодинный радиолокатор со сканированием диаграммы направленности антенны | 2018 |
|
RU2702190C1 |
| Гомодинный радиолокатор с многоканальным приемо-передающим трактом | 2018 |
|
RU2700654C1 |
| ГОМОДИННЫЙ РАДИОЛОКАТОР СО СКАНИРОВАНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2022 |
|
RU2815335C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ШИРОКОПОЛОСНЫМ НЕПРЕРЫВНЫМ ЛИНЕЙНО ЧАСТОТНО-МОДУЛИРОВАННЫМ ИЗЛУЧЕНИЕМ | 2010 |
|
RU2460087C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕЛИЧИНОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2013 |
|
RU2533198C1 |


Изобретение относится к радиолокации и может быть использовано в автомобильных транспортных средствах для обеспечения работы элементов систем безопасности. Предложена гомодинная радиолокационная система, которая включает в себя смеситель, выдающий сигнал с выходной частотой смесителя, представляющей собой разность частот двух входных сигналов. При небольшой разности частот низкочастотные шумы могут замаскировать фактический сигнал. Для изменения фазы на заранее заданное значение на одном из входов смесителя устанавливается регулируемый фазовращатель. Фазовращатель смещает частоту входного сигнала таким образом, чтобы выходная частота смесителя была сдвинута на заранее заданное значение. Низкие частоты соответствуют частотам, превышающим частоты шумов. Сдвиг фазы может быть достигнут за счет добавления постоянного значения фазы с заранее заданными временными интервалами. Для соответствия более высоким частотам необходимо повысить частоту дискретизации результирующего сигнала. Технический результат – уменьшения влияния шумов из-за смещения постоянного тока. 3 н. и 17 з.п. ф-лы, 6 ил.
1. Гомодинный приемник, который включает в себя:
смеситель, выполненный с возможностью принимать первый входной сигнал, основанный на передаваемом сигнале, и второй входной сигнал, основанный на принимаемом сигнале;
фазовращатель, выполненный с возможностью применять изменение фазы к одному из первого входного сигнала и второго входного сигнала; и
контроллер, выполненный с возможностью дискретизировать с частотой дискретизации выходную амплитуду смесителя и регулировать упомянутое изменение фазы для достижения заранее заданного значения изменения фазы.
2. Гомодинный приемник по п. 1, в котором фазовращатель выполнен с возможностью изменять фазу первого входного сигнала.
3. Гомодинный приемник по п. 1, который дополнительно включает в себя ответвитель, выполненный с возможностью связывать передаваемый сигнал с первым входным сигналом, и причем фазовращатель выполнен с возможностью изменять фазу первого входного сигнала.
4. Гомодинный приемник по п. 1, в котором фазовращатель выполнен с возможностью изменять фазу второго входного сигнала.
5. Гомодинный приемник по п. 1, который дополнительно включает в себя малошумящий усилитель, выполненный с возможностью обрабатывать принимаемый сигнал и выдавать второй входной сигнал, причем фазовращатель выполнен с возможностью изменять фазу второго входного сигнала.
6. Гомодинный приемник по п. 1, в котором упомянутое заранее заданное значение изменения фазы является заранее заданной постоянной величиной.
7. Гомодинный приемник по п. 1, в котором частота дискретизации превышает наибольшую ожидаемую выходную частоту смесителя.
8. Способ преодоления шумов смещения постоянного тока в гомодинном приемнике, содержащий этапы, на которых:
изменяют на заранее заданной частоте фазу первого входного сигнала в смеситель,
смешивают первый входной сигнал и второй входной сигнал в смесителе так, что выходной сигнал смесителя имеет частоту, которая смещена на заранее заданное значение, и
дискретизируют выходной сигнал смесителя с заранее заданной частотой.
9. Способ по п. 8, в котором изменение фазы первого входного сигнала включает в себя этап, на котором добавляют постоянную фазу к первому входному сигналу с заранее заданной частотой.
10. Способ по п. 8, в котором упомянутое заранее заданное значение является заранее заданной постоянной величиной.
11. Способ по п. 8, в котором первый входной сигнал основан на передаваемом сигнале.
12. Способ по п. 8, в котором первый входной сигнал основан на принимаемом сигнале.
13. Радиолокационная система, которая включает в себя:
гетеродин, выполненный с возможностью генерировать передаваемый сигнал,
антенну, выполненную с возможностью передавать передаваемый сигнал и принимать принимаемый сигнал,
гомодинный приемник, включающий в себя смеситель, выполненный с возможностью смешивать первый входной сигнал, основанный на передаваемом сигнале, и второй входной сигнал, основанный на принимаемом сигнале, и фазовращатель, выполненный с возможностью применять изменение фазы к одному из первого входного сигнала и второго входного сигнала; и
контроллер, выполненный с возможностью дискретизировать с частотой дискретизации выходную амплитуду смесителя и регулировать упомянутое изменение фазы для достижения заранее заданного значения изменения фазы.
14. Радиолокационная система по п. 13, в которой частота дискретизации превышает наибольшую ожидаемую выходную частоту смесителя.
15. Радиолокационная система по п. 13, в которой заранее заданное значение изменения фазы выбрано таким образом, чтобы выходная амплитуда смесителя превышала соответствующую амплитуду шума на основной частоте.
16. Радиолокационная система по п. 13, в которой упомянутое заранее заданное значение изменения фазы является заранее заданной постоянной величиной.
17. Радиолокационная система по п. 13, в которой фазовращатель выполнен с возможностью применять изменение фазы к первому входному сигналу путем добавления постоянной фазы к первому входному сигналу с частотой дискретизации.
18. Радиолокационная система по п. 13, в которой гомодинный приемник выполнен с возможностью применять изменение фазы к первому входному сигналу.
19. Радиолокационная система по п. 13, в которой гомодинный приемник выполнен с возможностью применять изменение фазы ко второму входному сигналу.
20. Радиолокационная система по п. 13, дополнительно включающая в себя ответвитель, выполненный с возможностью подавать передаваемый сигнал на антенну и обеспечивать связанный выходной сигнал на основании передаваемого сигнала, и причем первый входной сигнал является связанным выходным сигналом.
| US 4860014 A, 22.08.1989 | |||
| US 4682175 A, 21.07.1987 | |||
| US 3422430 A, 14.01.1969 | |||
| US 5929802 A, 27.07.1999 | |||
| US 2012242538 A1, 27.09.2012 | |||
| US 2013106648 A1, 02.05.2013 | |||
| ГОМОДИННЫЙ РАДИОПРИЕМНИК | 2000 |
|
RU2241310C2 |

