Изобретение относится к радиотехнике, а именно к области радиолокации. Известны радиолокаторы, получившие название "гомодинные", отличительным признаком которых является преобразование частоты принятого отраженного сигнала путем его перемножения на нелинейном элементе (смесителе) с излучаемым (зондирующим) сигналом. Выходной сигнал смесителя приемно-передающего устройства гомодинного радиолокатора имеет вид
Uвых = U0cos(ϕз-ϕпр), (1)
где ϕз,ϕпр - фазы зондирующего и принятого сигналов, U0 - амплитуда напряжения выходного сигнала. Анализ зависимости Uвых(t), при известной функции ϕз(t), выполняемый обычно комплексом цифровой обработки информации радиолокатора, позволяет определить известными методами координату и(или) ее производную по времени. Радиолокаторы этого типа отличаются простотой конструкции, низкой стоимостью и используются, как правило, в доплеровских измерителях скорости, а также в измерителях малых расстояний и высот, использующих частотную модуляцию (ЧМ-радиолокаторы). Вариантом гомодинного является автодинный радиолокатор, в котором функции генератора и смесителя выполняются одним неделимым функциональным элементом, например диодом Ганна. Выходной сигнал приемно-передающих устройств этих радиолокаторов лежит в области низких частот (от нуля до десятков килогерц).
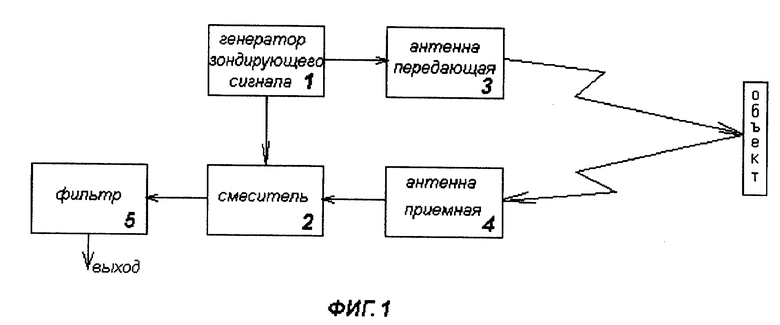
Упрощенная структурная схема приемно-передающего устройства гомодинной радиолокационной станции (РЛС) показана на фиг. 1 (см. А.С.Винницкий, "Автономные радиосистемы", М. , "Советское радио", 1986г., стр.153, 261). Устройство содержит генератор 1 зондирующего сигнала, подключенный к передающей антенне 3, и смеситель 2, один из входов которого соединен с генератором 1, а второй подключен к приемной антенне 4. Сигнал генератора 1 излучается передающей антенной 3, а отраженный от объекта сигнал принимается приемной антенной 4 и направляется на смеситель, где образуется сигнал, определяемый выражением (1), фаза которого равна разности фаз излучаемого и принятого сигналов. Выходной сигнал разностной фазы и, следовательно, частоты через фильтр поступают на выход приемно-передающего устройства, откуда направляются в комплекс обработки информации радиолокатора.
Недостаток этой схемы: понижение чувствительности приемника на низких выходных частотах, обусловленное влиянием фликкер-шума смесителя. Прямым измерением коэффициента шума гомодинного приемника диапазона 60 ГГц получены значения около 100 дБ при разности частот 10 Гц и 60 дБ при разности частот 10 КГц (см. В. Л.Вирченко и др. "Чувствительность приемника твердотельной гомодинной РЛС миллиметрового диапазона в области инфранизких частот" в сборнике "Твердотельные генераторные и преобразовательные приборы мм и субмм диапазона" Харьков, ИРЭ АН УССР, 1989г., стр.78-81). Очевидно, что значение коэффициента шума приближается к приемлемым значениям только при разности частот порядка единиц мегагерц.
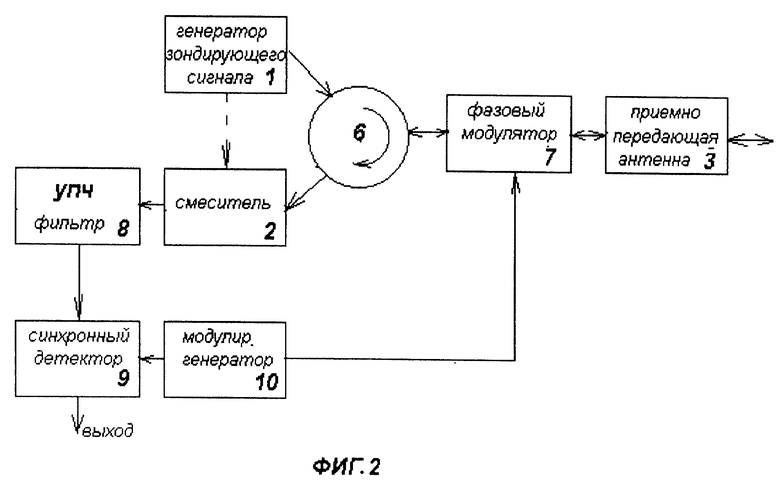
Указанный недостаток устраняют обычно повышением частоты выходного сигнала смесителя переходом к супергетеродинному принципу приема сигнала или модифицируют гомодинную схему включением смесителя сдвига частоты и фильтра между передатчиком и смесителем (см. А. С.Винницкий, "Автономные радиосистсмы", М., "Советское радио", 1986г., стр.181). Аналогом настоящего изобретения является "Доплеровский радар с фазовой модуляцией передаваемого и отраженного сигналов" (патент США 4439766 от 27 марта 1984г., G 01 S 9/44), в котором повышение частоты достигают фазовой молуляцией зондирующего сигнала частотой F, а полезный сигнал вида (1) получают векторным детектированием сигнала промежуточной частоты. На фиг.2 показана структурная схема этого устройства. Для обеспечения возможности работы с одной антенной применен ферритовый циркулятор 6, к двум плечам которого подключены генератор 1 и смеситель 2. Между третьим плечом циркулятора и приемно-передающей антенной 3 включен фазовый модулятор 7, управляемый сигналом модулирующего генератора 10. К выходу смесителя 2 через избирательный усилитель промежуточной частоты (УПЧ) 8 подключен синхронный детектор (СД) 9, второй вход которого соединен с выходом модулирующего генератора. В результате работы фазового модулятора отраженный сигнал на входе смесителя оказывается модулированным по фазе частотой F. Смеситель 2 выполняет роль демодулятора, а сигнал промежуточной частоты (ПЧ), близкой к величине F, снимается с его выхода, усиливается УПЧ 8 и детектируется с учетом фазы синхронным детектором 9. В результате этих операций на выходе синхронного детектора выделяется полезный сигнал, определяемый выражением (1). Недостаток этой схемы - нечувствительность выходного сигнала к знаку производной (ϕз-ϕпр)/dt, что не позволяет, например, получить информацию о знаке доплеровского смещения частоты, то есть направлении движения объекта.
Для повышения частоты выходного сигнала смесителя может быть использована импульсная модуляция зондирующего сигнала ключевыми устройствами в приемном и передающем каналах приемно-передающего устройства (см. заявку автора на патент на изобретение 99116167).
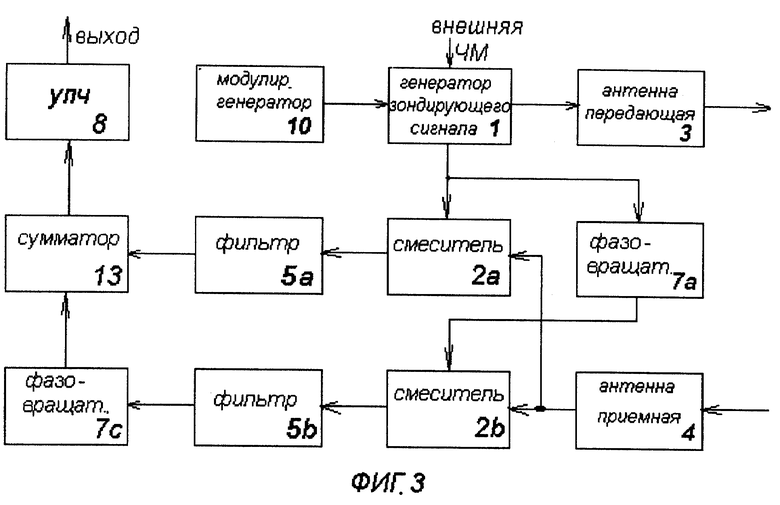
Ближайшим аналогом настоящего изобретения является радиолокационный высотомер с двойной частотной модуляцией (см. А.С.Винницкий, Очерк основ радиолокации при непрерывном излучении радиоволн, М. , "Советское радио", 1961г., стр.307). На фиг.3 показана структура приемно-передающего устройства этого высотомера, в котором сигнал промежуточной частоты получают за счет частотной модуляции зондирующего сигнала. Частотно-модулированный выходным напряжением генератора 10 сигнал генератора 1 излучается приемной антенной 3, а отраженный сигнал принимается приемной антенной 4 и направляется на смесители 2а и 2b, где он перемножается с зондирующим сигналом, поступающим на смесители с разностью фаз π/2, задаваемой фазовращателем 7а. Сигналы выбранной гармоники (кратности N) частоты модуляции выделяются фильтрами (2a и 2b) и складываются сумматором 13, причем фаза одного из сигналов изменяется на π/2 фазовращателем 7с. Результирующий сигнал промежуточной частоты через усилитель 8 поступает на выход устройства. Выходной сигнал этого устройства описывается выражением Uвых = U0cos[2πNFt+(ϕз-ϕпр)], а его частота fпч = NF+d(ϕз-ϕпр)/dt, то есть схема дает возможность определения знака доплеровского сдвига частоты и устраняет эффект критических скоростей в ЧМ-радиолокаторах.
Общим недостатком перечисленных устройств является то, что повышение частоты выходного сигнала смесителя и возможность определения знака доплеровского сдвига достигается введением в приемно-передающее устройство одного или нескольких дополнительных функциональных узлов СВЧ (смеситель, фазовращатель, фазовый модулятор, ключевые устройства). Высокая сложность и большая трудоемкость, обычные для узлов СВЧ, существенно повышают стоимость приемно-передающего устройства, что ограничивает их использование в очень перспективной области технологических радиолокаторов средней и малой дальности, где цена является важнейшим критерием применимости.
Настоящее предложение направлено на решение задач реализации высокой чувствительности приемно-передающих устройств гомодинных (в том числе автодинных) РЛС и обеспечения возможности определения знака доплеровского сдвига частоты простыми и дешевыми техническими средствами.
Поставленная задача решается согласно изобретению тем, что в приемно-передающее устройство гомодиного радиолокатора, содержащее генератор зондирующего сигнала, частота которого управляется напряжением, соединенный с передающей антенной, генератор модулирующего сигнала, выход которого подключен к входу управления частотой генератора зондирующего сигнала, смеситель, один вход которого соединен с приемной антенной, а второй с выходом генератора зондирующего сигнала, и соединенные последовательно с выходом смесителя усилитель и фильтр, настроенный на промежуточную частоту, равную частоте модуляции или ее гармонике, дополнительно включен синхронный детектор или квадратурный синхронный детектор, подключенный одним входом к генератору модулирующего сигнала, вторым входом к выходу фильтра, а выходами - к выходам устройства. Двухканальный вариант устройства имеет, кроме того, второй фильтр, настроенный на другую гармонику частоты модуляции и подключенный входом через усилитель к выходу смесителя, а выходом к входу второго синхронного детектора или квадратурного синхронного детектора, второй вход которого соединен с выходом модулирующего генератора, а выходы - с выходами устройства. Дополнительно устройство может иметь вход управления частотой модулирующего генератора и (или) фазовращатель, включенный между выходом модулирующего генератора и входами синхронных детекторов. Вместо смесителя и генератора зондирующего сигнала может быть включен исполняющий их функции автодинный узел, подключенный входом-выходом сигнала СВЧ к приемно-передающей антенне, входом управления частотой зондирующего сигнала - к выходу генератора модулирующего сигнала, а выходом - к входу усилителя.
К настоящему описанию приложены девять чертежей.
На фиг. 1 изображена классическая структурная схема приемно-передающего устройства гомодинной РЛС.
На фиг.2 изображена структурная схема аналога изобретения: приемно-передающего устройства с фазовым модулятором.
На фиг. 3 изображена структурная схема ближайшего аналога изобретения: приемно-передающего устройства высотомера с двойной частотной модуляцией.
На фиг. 4 изображена структурная схема одноканального варианта предлагаемого приемно-передающего устройства.
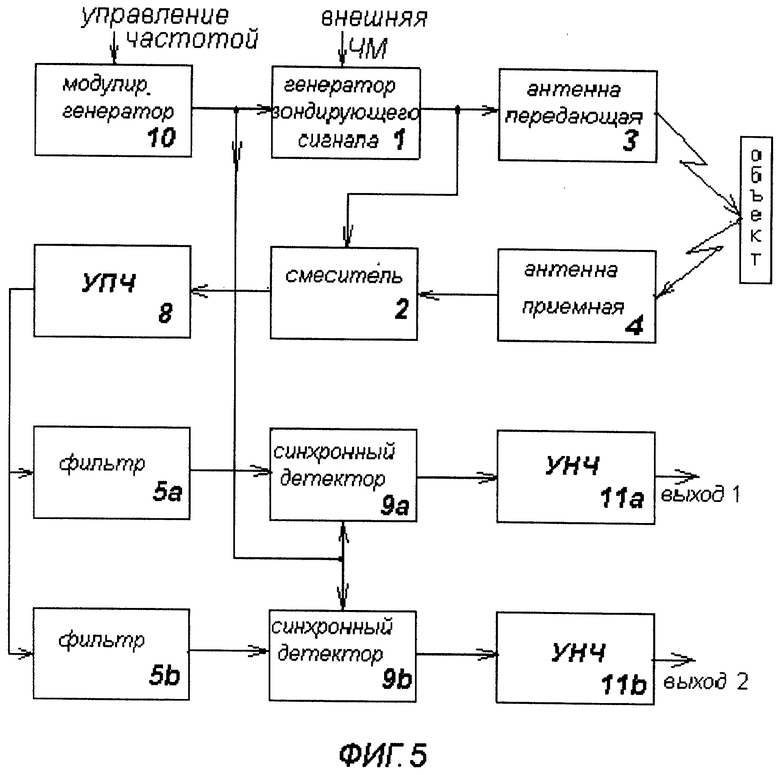
На фиг. 5 изображена структурная схема двухканального варианта предлагаемого приемно-передающего устройства.
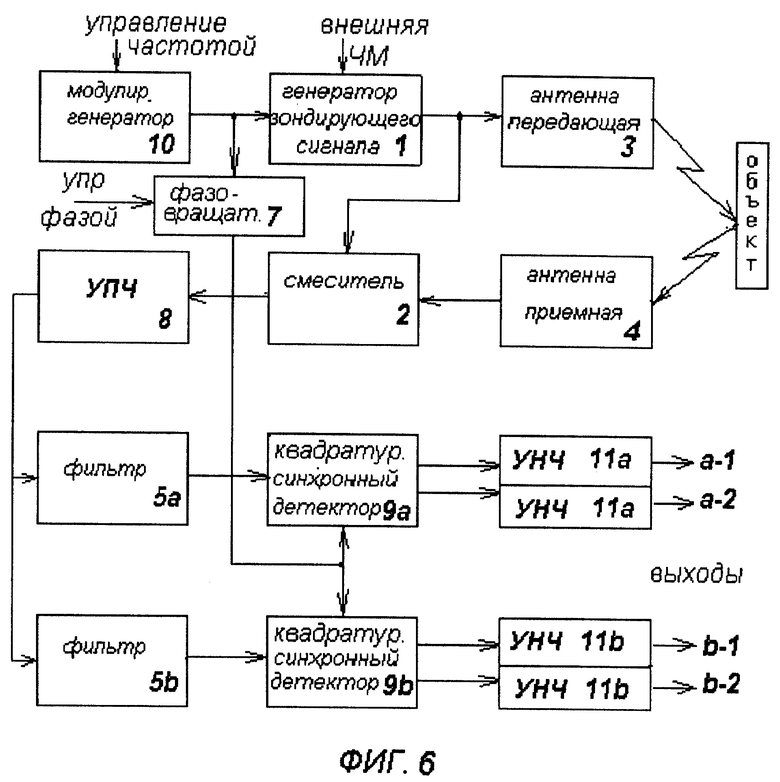
На фиг. 6 изображена структурная схема двухканального варианта предлагаемого приемно-передающего устройства, содержащего фазовращатель.
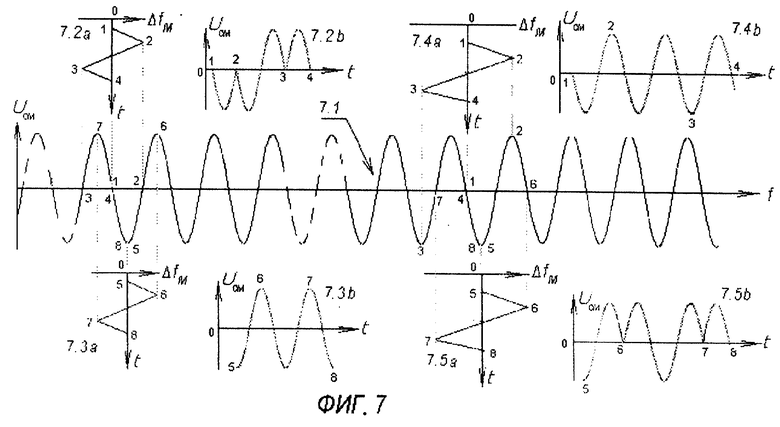
На фиг.7 изображена зависимость выходного напряжения смесителя от частоты зондирующего сигнала и временные диаграммы модулирующего напряжения и напряжения на выходе смесителя.
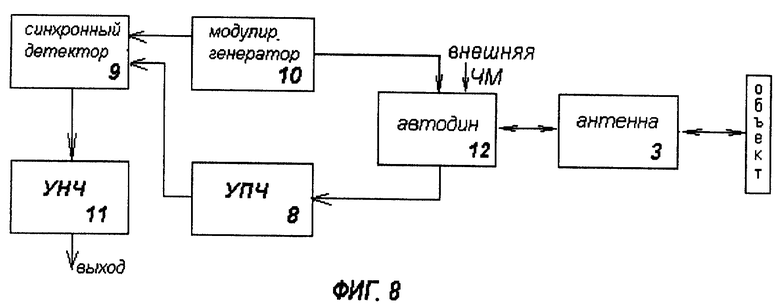
На фиг.8 изображена структурная схема автодинного одноканального варианта предлагаемого приемно-передающего устройства.
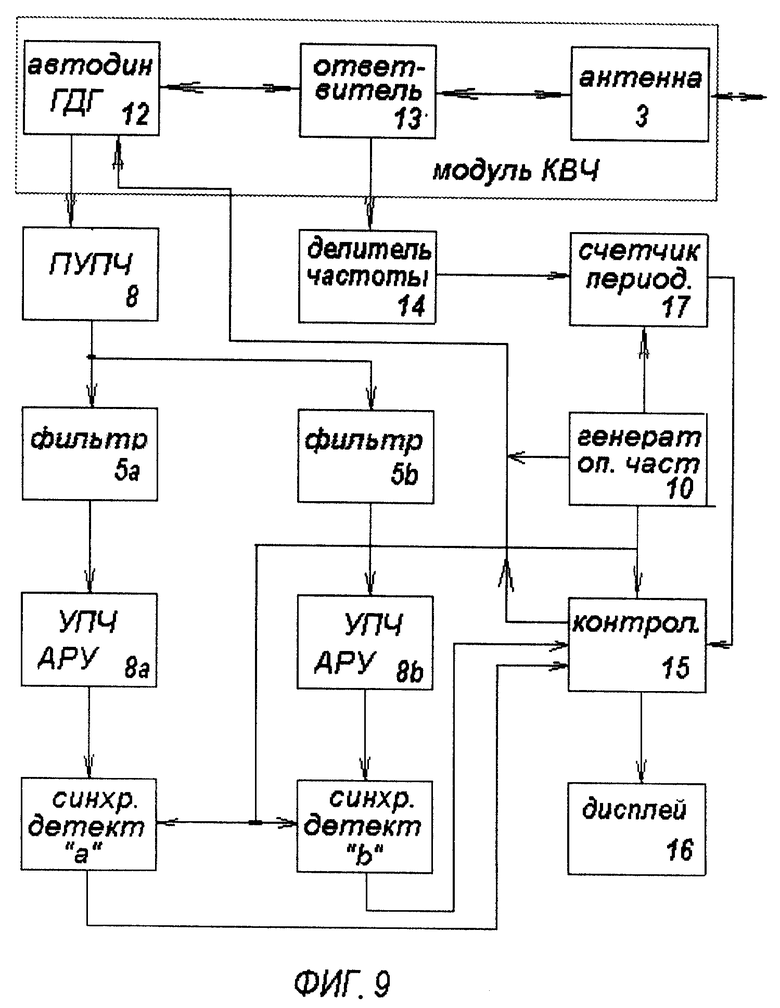
На фиг. 9 изображена структурная схема измерителя уровня жидкости, построенного на основе настоящего изобретения.
Приемно-передающее устройство гомодинного радиолокатора (фиг.4) содержит модулируемый по частоте генератор 1 зондирующего сигнала с круговой частотой ω = 2πf, выход которого подключен к передающей антенне 3 и смесителю 2, а вход управления частотой - к модулирующему генератору 10 с круговой частотой Ω = 2πF. Второй (сигнальный) вход смесителя 2 подключен к приемной антенне 4, а выход - к входу избирательного усилителя промежуточной частоты (УПЧ) 8, выход которого соединен с сигнальным входом синхронного детектора 9. Второй (опорный) вход синхронного детектора 9 подключен к выходу модулирующего генератора 10, а выход или выходы - с выходами приемно-передающего устройства. Выход синхронного детектора подключен к выходу через усилитель с фильтром нижних частот 11. Поскольку этот признак не является существенным, далее он может не упоминаться. Генератор зондирующею сигнала 1 может иметь дополнительный вход частотной модуляции внешним сигналом.
Синхронный детектор, который в технической литературе называют также векторным или фазочувствительным детектором, мы определяем как амплитудный детектор, значение выходного напряжения которого определяется амплитудой, а полярность - фазой детектируемого сигнала. Синхронный детектор имеет сигнальный вход, на который поступает детектируемый сигнал, и вход опорного сигнала, частота которого равна частоте детектируемого сигнала или отличается от него в целое число раз. В предлагаемом приемно-передающем устройстве синхронный детектор выполняет операции умножения частоты опорного сигнала на заданное целое число N, перемножения полученного и детектируемого сигналов и выделения низкочастотной составляющей полученного сигналов. Так, если опорный сигнал синусоидален (Uon=U0on sinΩt), то при детектируемом сигнале U= U0[sinN(Ωt-Ф)] выходной сигнал синхронного детектора определяется выражением Uсд=U0[sinN(Ωt-Ф)]sinNΩt=U0соsФ, а при детектируемом сигнале U= U0[cosN(Ωt-Ф)] выходной сигнал синхронного детектора имеет вид Uсд=U0sinФ. В обычном режиме синхронного детектора Ф=0. Квадратурным синхронным детектором мы называем комбинацию двух параллельно включенных синхронных детекторов, причем на их сигнальные входы детектируемый сигнал поступает с разностью фаз π/2. Из вышеизложенного следует, что сигналы на первом U(1)сд и втором U(2)сд выходах квадратурного синхронного детектора имеют вид: U(1)сд=U0cosNФ и U(2)сд= U0sinNФ. Квадратурный синхронный детектор позволяет определить модуль  детектируемого сигнала и разность его фазы и фазы соответствующей гармоники опорного сигнала NФ=arctg(U(2)сд/ U(1)сд). Синхронный детектор может быть реализован в вариантах: аналоговом (например, комбинация умножителя частоты, смесителя и фильтра нижних частот), импульсном (на основе схем совпадения), а также цифровом (программа перемножения и цифровой фильтрации функций).
детектируемого сигнала и разность его фазы и фазы соответствующей гармоники опорного сигнала NФ=arctg(U(2)сд/ U(1)сд). Синхронный детектор может быть реализован в вариантах: аналоговом (например, комбинация умножителя частоты, смесителя и фильтра нижних частот), импульсном (на основе схем совпадения), а также цифровом (программа перемножения и цифровой фильтрации функций).
Приемно-передающее устройство (фиг.4) работает следующим образом. Частотно-модулированный зондирующий сигнал генератора 1 излучается антенной 3, а отраженный сигнал принимается антенной 4 и направляется на вход смесителя 2. В результате взаимодействия на нелинейных элементах смесителя частотно-модулированного зондирующего сигнала, непосредственно поступающего с выхода генератора 1, и задержанного принятого отраженного сигналов на выходе смесителя 2 образуется сложное колебание, имеющее линейчатый спектр, концентрирующийся в областях гармоник частоты модуляции. Амплитуда и фаза каждой составляющей спектра определяются функцией (ϕз-ϕпр), а также функцией внешней частотной модуляции. Выделение одной из гармоник избирательным усилителем промежуточной частоты 8 и векторное, то есть учитывающее фазу, детектирование синхронным детектором 9 одной из гармоник выходного напряжения смесителя позволяет, как показано ниже, получить на выходе синхронного детектора напряжение вида (1), то есть реализовать основную функцию приемно-передающего устройства.
Зондирующий сигнал, излучаемый передатчиком и направляемый на смеситель, в общем случае имеет вид:
а принятый отраженный сигнал на входе смесителя:
где Е0 - ЭДС зондирующего сигнала на клеммах антенны; ω0 = 2πf0 - круговая несущая частота зондирующего сигнала; ϕM(t) - составляющая фазы, обусловленная частотной модуляцией генератора сигналом модулирующего генератора; ϕчм(t) - составляющая фазы, обусловленная внешней частотной модуляцией зондирующего сигнала; τ - время задержки принятого отраженного сигнала относительно зондирующего; γ - коэффициент ослабления сигнала на трассе "передающая антенна-объект-приемная антенна".
Если поступающая на смеситель мощность зондирующего сигнала много больше мощности принятого отраженного сигнала, то амплитуда низкочастотной составляющей выходного сигнала смесителя пропорциональна амплитуде принятого отраженного сигнала, а фаза равна разности фаз зондирующего и принятого отраженного сигналов:
или
где α - коэффициент передачи смесителя, ΔϕM(t,τ) и Δϕчм(t,τ) - составляющие разности фаз, обусловленные соответственно модуляцией частоты зондирующего сигнала модулирующим генератором и внешней частотной модуляцией. В тригонометрической форме действительная часть выражения (5) приобретает вид:
Uсм = U0смcos[ω0τ+ΔϕM(t,τ)+Δϕчм(t,τ)]. (6)
Первое слагаемое в квадратных скобках - произведение постоянной величины (несущей частоты зондирующего сигнала) на постоянное или медленно меняющееся время задержки принятого отраженного сигнала - говорит о наличии на выходе смесителя постоянной составляющей, зависящей от времени задержки (τ), или сигнала доплеровской частоты. Второе слагаемое ответственно за появление на выходе смесителя гармоник модулирующей частоты, а третье слагаемое является следствием внешней частотной модуляции и вносит в сигнал (6) информацию о расстоянии до отражающего объекта. Если выходной сигнал модулирующего генератора есть гармоническая функция времени, а зависимость частоты зондирующего генератора от напряжения управления линейна, то мгновенное значение частоты зондирующего сигнала имеет вид f=f0+Δfм=f0+Δf0sinΩt, и второе слагаемое выражения (6) определится, как
где Ψ = Ψ0sinФ, Ψ0 = 2Δf0/F - удвоенный индекс частотной модуляции зондирующего генератора, Ф = Ωτ/2, Δf0 - девиация частоты, Ω = 2πF - круговая частота модуляции.
Обозначив искомую функцию Δϕx = [ω0τ+Δϕчм(t,τ)], получим:
Uсм = U0смcos[Δϕx+Ψsin(Ωt-Ф)].
При Δf0=0 это выражение приводится к виду (1), описывающему классическую гомодинную схему (фиг.1):
U
а в общем случае:
Согласно теории функций Бесселя (см. А.А.Харкевич, "Спектры и анализ", Москва, ГИФМЛ, 1962, стр.39) справедливо:

С учетом последних соотношений получаем выражение для спектра выходного сигнала смесителя:
где n>0 - целое число, определяющее номер гармоники (N) частоты модуляции (N=2n или N=2n-l).
На выходе усилителя промежуточной частоты, имеющего коэффициент усиления k и настроенного на частоту F или ее нечетную гармонику, получаем усиленный сигнал:
Для случая, когда усилитель промежуточной частоты настроен на четную гармонику F, получим аналогично:
U(2n) = 2kU0см[cosΔϕxJ(2n)(Ψ)cos2n(Ωt-Ф)]
или, если на входе или на выходе усилителя четной гармоники включен фазовращатель на π/2,то
Сигналы вида (10) и (11) синфазны между собой и с опорным сигналом и поэтому удобны для обработки. Поскольку наличие этого фазовращателя не является существенным признаком, в дальнейшем его наличие подразумевается без упоминания.
После детектирования выходного сигнала усилителя синхронным детектором, опорным сигналом которого является сдвинутый по фазе на величину Ф модулирующий сигнал, для выходного напряжения синхронного детектора в случае нечетной гармоники получим из (10):
Uсд(2n-1) = 2kJ(2n-1)(Ψ)U0смsinΔϕx, (12)
а в случае четной гармоники из (11):
Uсд(2n) = 2kJ(2n)(Ψ)U0смcosΔϕx. (13)
Из сравнения выражений (1), (8), (12) и (13) очевидно, что вид функции, описывающей выходной сигнал (13) предлагаемого одноканального устройства (фиг. 4), использующего четную гармонику частоты модуляции, не отличается от классического (1). Сигнал (12) получается из него заменой cosΔϕx на sinΔϕx (то есть сдвигом фазы на π/2).
Коэффициент шума этого устройства, приведенный к точке "вход смесителя - выход антенны" вычисляется по формуле: Квх(ед)=Ксм пч+Купч+(Ксд-1)/k, где Ксм пч - коэффициент шума смесителя на промежуточной частоте, Kсд и Kупч - коэффициенты шума синхронного детектора и усилителя промежуточной частоты. Поскольку на частотах порядка 10 МГц при достаточно большом коэффициенте усиления УПЧ k сумма второго и третьего слагаемых на превышает нескольких единиц, то выигрыш в результирующей чувствительности определится отношением коэффициентов шума смесителя на низкой и промежуточной частотах. Если частота сигнала на выходе приемно-передающего устройства имеет порядок 10 КГц, а промежуточная частота составляет 10 МГц, то выигрыш в чувствительности составляет 40 дБ (см В.Л.Вирченко и др. "Чувствительность приемника твердотельной гомодинной РЛС миллиметрового диапазона в области инфранизких частот" в сборнике "Твердотельные генераторные и преобразовательные приборы мм и субмм диапазона" Харьков, ИРЭ АН УССР, 1989г., стр.78-81), что в 10 раз увеличивает дальность радиолокатора (см. Коган И.М. Ближняя радиолокация. М. , "Советское радио", 1973, стр.45).
Сравнение сигналов (12) и (13) дает возможность определить знак смещения частоты в доплеровских радиолокаторах и исключает ограничения, связанные с наличием "критической скорости" в ЧМ локаторах. Например, если имеет место доплеровский сдвиг частоты Δωx принятого отраженного сигнала, и Δϕx = Δωxt, то разность фаз сигналов (12) и (13) при Δωx > 0 положительна (+π/2), а при Δωx < 0 отрицательна (минус π/2).
Блок-схема варианта предлагаемого устройства, показанная на фиг.5, имеет два канала принятого сигнала, подключенные к выходу смесителя 2, каждый из которых содержит фильтр (5а или 5b), синхронный детектор (9а или 9b) и усилитель низкой частоты (11a или 11b). Один из каналов настраивается на нечетную, а другой на четную гармоники частоты модулирующего сигнала, в результате чего на их выходах выделяются сигналы вида (12) и (13). Очевидно, что предлагаемое устройство (фиг.5) дополнительно решает задачу исключения неопределенности знака смещения частоты, причем более простыми средствами, чем прототип, поскольку отличается от блок-схемы фиг.3 отсутствием второго смесителя и фазовращателя.
Поскольку Ψ = Ψ0sinФ, сигналы (12) и (13) обращаются в ноль при значениях Ф, кратных π, то радиолокатор может иметь "слепые" зоны, разделенные расстояниями в половину длины волны модулирующего сигнала. Соотношение заданной максимальной дальности действия радиолокатора Lmax и выбранной длины волны модулирующего сигнала  (С - скорость электромагнитных волн) определяет три возможных режима работы приемно-передающего устройства, оптимизация параметров которых достигается некоторым изменением структурной схемы устройства.
(С - скорость электромагнитных волн) определяет три возможных режима работы приемно-передающего устройства, оптимизация параметров которых достигается некоторым изменением структурной схемы устройства.
Квазистационарный режим реализуется, когда  В этом случае Ф<<1, а sin Ф≈Ωτ/2. Варианты устройств, схемы которых показаны на фиг.4 и 5 предназначены для реализации этого режима.
В этом случае Ф<<1, а sin Ф≈Ωτ/2. Варианты устройств, схемы которых показаны на фиг.4 и 5 предназначены для реализации этого режима.
Квазидинамический режим имеет место, если условие  не выполняется, но
не выполняется, но  В этом режиме слепая зона не попадает в интервал рабочих дальностей радиолокатора, но равная NФ разность фаз сигнала промежуточной частоты и гармоники частоты модуляции на входах каждого из синхронных детекторов может изменяться от нуля до величины Nπ. В этом случае целесообразно (фиг. 6) включение между выходом модулирующего генератора 10 и опорным входом (входами) синхронных детекторов 9 фазовращателя 7, реализующего сдвиг фазы опорного сигнала ϕфв≈-Ф. Значение Ф может определяться, например, по априорным или полученным в процессе работы радиолокатора данным о времени задержки τcp отраженного сигнала (Ф = Ωτcp/2). Использование квадратурных синхронных детекторов (фиг.6), позволяющих определить главное значение сдвигов фазы NФ в каждом канале, открывает возможность измерения значения Ф и, при необходимости, автоматической установки ϕфв ≈ -Ф.
В этом режиме слепая зона не попадает в интервал рабочих дальностей радиолокатора, но равная NФ разность фаз сигнала промежуточной частоты и гармоники частоты модуляции на входах каждого из синхронных детекторов может изменяться от нуля до величины Nπ. В этом случае целесообразно (фиг. 6) включение между выходом модулирующего генератора 10 и опорным входом (входами) синхронных детекторов 9 фазовращателя 7, реализующего сдвиг фазы опорного сигнала ϕфв≈-Ф. Значение Ф может определяться, например, по априорным или полученным в процессе работы радиолокатора данным о времени задержки τcp отраженного сигнала (Ф = Ωτcp/2). Использование квадратурных синхронных детекторов (фиг.6), позволяющих определить главное значение сдвигов фазы NФ в каждом канале, открывает возможность измерения значения Ф и, при необходимости, автоматической установки ϕфв ≈ -Ф.
Динамический режим имеет место при  и отличается наличием "слепых" зон. Поскольку эти зоны расположены на расстояниях, кратных Λ/2, их положение в пространстве будет изменяться при изменении частоты модуляции F и при определенном значении диапазона изменения частоты F обеспечивается последовательный обзор всего заданного пространства. Таким образом, эффект "слепых" зон может быть устранен или его влияние уменьшено применением модулирующего генератора 10 с частотой, управляемой напряжением. При необходимости постоянного сопровождения одного объекта частота модуляции может непрерывно или периодически настраиваться по критерию максимума величины выходного сигнала (Uсд(2n) 2+Uсд(2n-1) 2. Применение квадратурных синхронных детекторов (фиг.6) дает информацию о разности фаз сигналов на их входах, что дает возможность осуществить автоматическую подстройку частоты модулирующего генератора 10 по критерию заданной разности фаз сигналов промежуточной частоты и соответствующей гармоники модулирующего сигнала.
и отличается наличием "слепых" зон. Поскольку эти зоны расположены на расстояниях, кратных Λ/2, их положение в пространстве будет изменяться при изменении частоты модуляции F и при определенном значении диапазона изменения частоты F обеспечивается последовательный обзор всего заданного пространства. Таким образом, эффект "слепых" зон может быть устранен или его влияние уменьшено применением модулирующего генератора 10 с частотой, управляемой напряжением. При необходимости постоянного сопровождения одного объекта частота модуляции может непрерывно или периодически настраиваться по критерию максимума величины выходного сигнала (Uсд(2n) 2+Uсд(2n-1) 2. Применение квадратурных синхронных детекторов (фиг.6) дает информацию о разности фаз сигналов на их входах, что дает возможность осуществить автоматическую подстройку частоты модулирующего генератора 10 по критерию заданной разности фаз сигналов промежуточной частоты и соответствующей гармоники модулирующего сигнала.
Приведенный выше математический аппарат достаточно строго описывает функционирование приемно-передающего устройства с частотной модуляцией, но не дает ключа к пониманию физического содержания неочевидных процессов и режимов. Достаточно простую физическую интерпретацию можно дать квазистационарному режиму. Известен (см Капланов М.Р., Левин В.А., "Автоматическая подстройка частоты", Москва, Госэнергоиздат, 1962г.) многочастотный дискриминатор, представляющий из себя соединение фазового детектора (синоним смесителя, работающего с близкими частотами) и линии задержки. Зависимость выходного напряжения фазового детектора от частоты сигнала, который поступает на один его вход непосредственно, а на другой - через линию задержки, представляет собой косинусоиду. В нашем случае роль линии задержки играет трасса "передающая антенна-отражающий объект-приемная антенна", а выражение для частотной характеристики для медленно меняющихся частот следует из (1). Если (ϕз -ϕпр) = ωτ, то Uвых=U0cosωτ, а период характеристики равен 1/τ. На фиг.7 частотная характеристика обозначена цифрами 7.1
На графике 7.3a показан один период изменения частоты при модулирующем сигнале треугольной (для наглядности) формы. В момент времени 5 отклонение частоты от центральной равно нулю, а выходное напряжение минимально. При переходе в точку 6 выходное напряжение по характеристике 7.1 изменяется до максимума, что и отражается на временной диаграмме (7.3b) появлением половины периода между точками 5 и 6. Во время перехода между точками 6 и 7 рабочая точка перемещается по характеристике 7.1 от максимума через минимум до другого максимума, а на временной диаграмме появляется один период. В интервале времени 7-8 (гр. 7.3а) рабочая точка возвращается в минимум характеристики. Таким образом, один период модуляции образует два периода выходного сигнала, то есть если девиация частоты равна половине периода характеристики многочастотного дискриминатора, а центральная частота установлена на точку экстремума выходного напряжения, происходит удвоение частоты. Графики 7.4 a, b аналогичным образом поясняют процесс появления третьей гармоники. Отметим, что она имеет место при центральной частоте, установленной в точку нуля характеристики дискриминатора, а девиация частоты составляет три четверти периода. Смещение центральной частоты на половину периода характеристики дискриминатора изменяет фазу каждой гармоники на π, а графики 7.2а,b и 7.5a, b показывают, что смещение центральной частоты на четверть периода обращает эти гармоники в ноль.
Возможность уменьшения требуемой девиации (с сохранением уровня выходного сигнала) в квазидинамическом режиме можно с некоторыми натяжками объяснить тем, что в этом режиме частотная характеристика колеблется по оси частот противофазно зондирующему сигналу. В "слепой зоне" динамического режима эти колебания синфазны и изменения выходного напряжения не происходит.
Поскольку во всех вариантах устройства (фиг.4, фиг.5 и фиг.6) между генератором 1 и смесителем 2 какие-либо функциональные элементы отсутствуют, оба эти узла во всех вариантах могут быть заменены, как это показано на фиг. 8, одним неделимым автодинным элементом 12, выполняющим функции генерации излучаемого сигнала и перемножения (смешения) с ним принятого отраженного сигнала. Наиболее часто функции автодина выполняются диодами Ганна, имеющими пониженное потребление тока.
Примером применения изобретения является радиолокационный измеритель уровня жидкостей, использующий фазочастотный метод измерения расстояния (см. заявку автора на патент на изобретение 99116167). Структурная схема измерителя, использующего двухканальную схему приемопередатчика и автодинный узел, выполненный на базе модуля М55314 (см. Воторопин С.Д., Юрченко В.И., Автодины на диодах Ганна и устройства на их основе. "Электронная промышленность", вып.1-2, 1998г., стр.110-115), показана на фиг.9. Модуль доработан с целью обеспечения электронной перестройки частоты и расширения диапазона выходных частот до 100 МГц. Роль модулирующего генератора исполняет кварцевый генератор частотой 5 МГц, являющийся одновременно синхронизатором микропроцессоров и эталоном частоты. Каналы промежуточной частоты настроены на вторую и третью гармоники частоты модуляции, индекс частотной модуляции зондирующего сигнала равен четырем. Сигналы промежуточной частоты с выхода автодинного узла усиливаются усилителем 8 и разводятся по двум частотным каналам (10 МГц и 15 МГц) фильтрами 5a и 5b. Усиленные до уровня нескольких вольт усилителями 8а и 8b сигналы поступают на синхронные детекторы и далее на контроллер. Контроллер в соответствии с программой направляет сигналы в цепь управления частотой автодинного генератора 12, и используя данные измерения частоты зондирующего сигнала, полученные с помощью делителя частоты 14 и счетчика периодов 17, вычисляет расстояние от измерителя до отражающего слоя жидкости. Расчетный требуемый уровень мощности зондирующего сигнала, при котором обеспечивается отношение сигнал/шум 40 дБ, составляет 64 микроватта.
Применение изобретения в измерителе уровня позволяет:
Уменьшить количество дорогих микроволновых узлов до минимума.
Применить простейший алгоритм измерения фазочастотной характеристики.
Снизить излучаемую мощность до 100 мкВт и за счет этого снизить потребляемую мощность до 0,5 Вт, что особенно важно для пожароопасных объектов.
Снизить лимитную цену измерителя до $150.
Предложенное устройство может найти широкое применение в технологических радиолокаторах других применений, доплеровских радиолокаторах службы безопасности движения и высотомерах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2002 |
|
RU2239845C2 |
| Приёмо-передающее устройство гомодинного радиолокатора | 2021 |
|
RU2787976C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ (ВАРИАНТЫ) | 2000 |
|
RU2195689C2 |
| ГОМОДИННЫЙ РАДИОЛОКАТОР СО СКАНИРОВАНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2022 |
|
RU2815335C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 1998 |
|
RU2158937C2 |
| Интерферометрический гомодинный радиолокатор | 2018 |
|
RU2689397C1 |
| АВТОДИННЫЙ ФОТОДЕТЕКТОРНЫЙ ПРИЕМОПЕРЕДАТЧИК ДЛЯ СИСТЕМ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2023 |
|
RU2824039C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2001 |
|
RU2218582C2 |
| ГОМОДИННЫЙ РАДИОЛОКАТОР | 2015 |
|
RU2626405C2 |
Изобретение относится к радиотехнике, а именно к области радиолокации. Достигаемым техническим результатом является повышение чувствительности и обеспечение возможности определения знака доплеровского сдвига частоты. Приемно-передающее устройство гомодинного радиолокатора содержит генератор зондирующего сигнала, частота которого управляется напряжением, соединенный с передающей антенной, генератор модулирующего сигнала, выход которого подключен к входу управления частотой генератора зондирующего сигнала, смеситель, один вход которого соединен с приемной антенной, а второй - с выходом генератора зондирующего сигнала, соединенные последовательно с выходом смесителя усилитель и фильтр, настроенный на частоту модуляции или ее гармонику, синхронный детектор или квадратурный синхронный детектор, подключенный одним входом к генератору модулирующего сигнала, вторым входом - к выходу фильтра, а выходами - к выходам устройства. Вариант устройства, определяющий знак производной разности фаз принятого и зондирующего сигналов, содержит дополнительно второй фильтр, соединенный через усилитель с выходом смесителя и настроенный на другую гармонику модулирующего сигнала, второй синхронный или квадратурный синхронный детектор, подключенный одним входом к генератору модулирующего сигнала, вторым - к выходу второго фильтра, а выходами - к выходам устройства. Вариант устройства вместо смесителя и генератора зондирующего сигнала содержит исполняющий их функции автодинный узел, подключенный входом-выходом сигнала СВЧ к приемно-передающей антенне, входом управления частотой зондирующего сигнала - к выходу генератора модулирующего сигнала, а выходом - к входу усилителя. 2 з.п.ф-лы, 9 ил.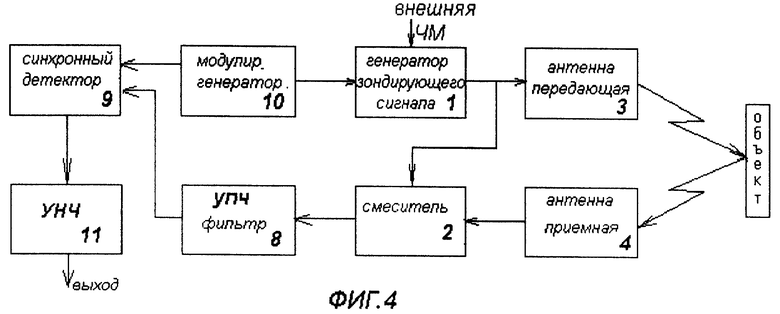
| ВИННИЦКИЙ А.С | |||
| Очерк основ радиолокации | |||
| - М.: Советское радио, 1961, с.307 US 4439766, 27.03.1984 | |||
| US 4503433, 05.03.1985 | |||
| ЭЛЕКТРОМАГНИТ/НЫЙ ВИБРАЦИОННЫЙ ПРИВОД | 0 |
|
SU258917A1 |
| РАДИОДАТЧИК | 1994 |
|
RU2087922C1 |

