Изобретение относится к радиолокации и может быть использовано в радиолокационных станциях для управления их разрешающей способностью. В настоящее время известны способы достижения высокого разрешения по дальности в радиолокационных станциях. Эти способы основаны на использовании зондирующих сигналов с широким частотным спектром, что требует широкой полосы пропускания в приемном канале РЛС и связано с ростом вредного влияния внешних помех и внутренних шумов приемного канала на достижимые характеристики РЛС.
В то же время известны способы построения РЛС непрерывного излучения, приемные каналы которых строятся по принципу так называемого гомодинного приема, когда в качестве гетеродинного напряжения в приемнике используется непрерывный сигнал передатчика. Это позволяет сузить полосу пропускания приемного канала по сравнению с шириной спектра зондирующего сигнала, уменьшить помехи и шумы, снизить частоту дискретизации АЦП в цепях цифровой обработки.
Известен "Способ разрешения целей по дальности радиолокационной станцией и импульсная радиолокационная станция со сжатием импульсов и восстановлением сигналов» (RU 2296345 C2, МПК G01S 13/42, опубл. 27.03.2007). Он заключается в том, что передающая антенна станции излучает сложные зондирующие сигналы с внутриимпульсной частотной модуляцией или фазовой манипуляцией, генерируемые передатчиком. Приемная антенна станции принимает отраженные сигналы, в приемном тракте на каждом периоде повторения импульсов производится фильтрация принятых сигналов в согласованном фильтре, в обнаружителе принимается решение об обнаружении сигналов и в вычислителе производится определение дальности до цели. Причем, до обнаружения сигнала на каждом периоде повторения импульсов дополнительно к согласованной фильтрации после сжатия импульса производится восстановление сигнала восстанавливающим фильтром.
Наиболее близким по технической сущности к предлагаемому способу является «Способ и система для радиолокационного измерения скоростей и координат объектов (варианты)» (RU 2255352 C2 опубл. 10.02.2005 г., МПК G01S 13/42), включающий в себя излучение или предусматривающий излучение периодически модулированного по частоте зондирующего сигнала, прием отраженных от объектов сигналов, перемножение излучаемого и принятых сигналов, усиление полученного в результате перемножения гомодинного сигнала. Далее линейным и аналого-цифровым преобразованиями гомодинного сигнала формируют сигнал промежуточных частот в виде последовательности цифровых фрагментов заданной длительности, формируют основную двумерную матрицу базисных сигналов, каждый из которых имитирует ожидаемый гомодинный сигнал, номера столбцов матрицы базисных сигналов соответствуют множеству средних ожидаемых значений дальности, а номера строк - множеству средних ожидаемых значений скорости отражающих объектов, вычисляют последовательность основных матриц значений функций взаимной корреляции матрицы базисных сигналов и каждого из фрагментов сигнала промежуточных частот, обнаруживают объекты путем выявления элементов матрицы функций взаимной корреляции любого фрагмента, значения которых превышают заданный пороговый уровень, и определяют дальность и скорость обнаруженных объектов по номерам соответственно столбца и строки выявленных элементов.
Недостаток подобных способов состоит в трудноустранимом влиянии паразитного сигнала, просачивающегося непосредственно из передающего канала на вход приемного. Варианты, связанные с использованием схем автоматической компенсации этого проникающего сигнала до приемлемых уровней, сложны, отличаются нестабильностью и критичностью настройки, особенно в РЛС средней и большой дальности. Положение не спасает и переход на использование раздельных антенн на прием и передачу, так как развязка между близкорасположенными передающей и приемной антеннами оказывается недостаточной и зависит от переотражений излучаемого сигнала на окружающих антенну предметах. Поэтому гомодинные методы приема используются в РЛС малой дальности действия, например в автомобильных РЛС предупреждения столкновений и полицейских радарах, в которых уровень излучения и, соответственно, уровень непрерывного просачивающегося сигнала очень низок.
Технический результат предлагаемого изобретения заключается в устранении недостатков РЛС непрерывного излучения, в которых используется гомодинный метод приема отраженных сигналов, в возможности в широких пределах изменять разрешающую способность РЛС за счет выбора оптимального соотношения между длительностью зондирующего излучения и интервалом приема отраженных сигналов.
Сущность предлагаемого способа управления величиной разрешающей способности радиолокационной станции заключается в том, что он основан на генерировании непрерывного модулированного по частоте сигнала, излучении этого сигнала в пространство, приеме отраженного сигнала и преобразовании его на промежуточную частоту гомодинным методом.
Новым в предлагаемом техническом решении является повторение модуляции генерируемого сигнала в каждом такте работы радиолокационной станции, причем длительность такта определяют по заданной дальности действия РЛС и задаваемой разрешающей способности, затем по задаваемой разрешающей способности определяют соответствующее ей время окончания излучения, а прием отраженного сигнала производят в оставшееся до окончания такта работы время, причем принятый отраженный сигнал и генерируемый модулированный по частоте сигнал преобразуют на промежуточную частоту гомодинным методом. При этом значение промежуточной частоты пропорционально дальности до отражателя.
На фиг.1 изображена функциональная схема, реализующая заявленный способ управления величиной разрешающей способности радиолокационной станции.
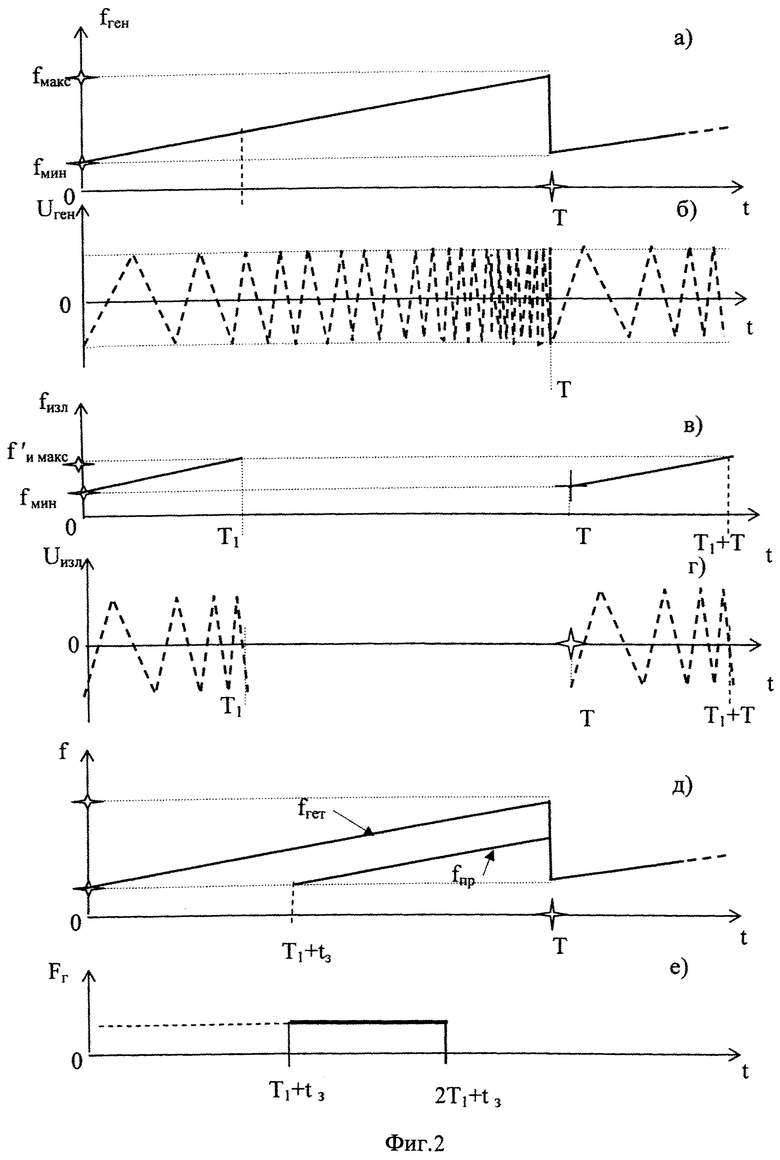
На фиг.2
а) приведена зависимость частоты fген(t) генерируемого сигнала от времени;
б) - эпюра генерируемого напряжения Uген(t);
в) - изображена частота заполнения излучаемого импульса;
г) - показана эпюра излучаемых импульсов;
д) - показана временная зависимость частоты отраженного сигнала fпр и сигнала гетеродина fгет.
е) - показана зависимость частоты сигнала в УПЧ от времени;
Функциональная схема, реализующая заявленный способ управления величиной разрешающей способности радиолокационной станции, состоит из задающего ЛЧМ генератора 1, усилителя промежуточной частоты (УПЧ) 2, ключа 3, антенны 4, смесителя 5.
Процессы, поясняющие предлагаемый способ, удобно представить в виде трех взаимосвязанных этапов: этапа генерации непрерывного во времени частотно-модулированного сигнала генератором 1, этапа излучения его в течение времени T1 и, таким образом, фактически этап излучения импульсного зондирующего сигнала антенной 4. Этап излучения завершается размыканием ключа. Далее следует этап приема отраженного сигнала, в котором участвуют антенна 4, смеситель 5 и УПЧ 2. Временные характеристики, соответствующие этим этапам, показаны на фиг.2 (а-г).
Этапу генерации соответствует выработка непрерывного во времени сигнала, в котором частота линейно меняется в определенных пределах в течение временного интервала (цикла) 0…T. Величину T определяют исходя из заданной дальности действия РЛС и задаваемой разрешающей способностью ΔR по формулам
где с - скорость света, к - крутизна частотной модуляции
По достижении времени Т процесс линейной частотной модуляции повторяют. В режиме излучения участвуют кроме генератора 1 ключ К в его замкнутом состоянии и антенна 4. В момент времени Т1 (Т1<Т) ключ К размыкается, вследствие чего в пространство излучается ЛЧМ зондирующий импульс с длительностью Т1 и девиацией частоты f'мах - fмин. Процесс импульсного излучения показан на фиг.2в, г.
Этап приема отраженных сигналов начинается в момент времени T1. Отраженные сигналы, принимаемые антенной 4, поступают на первый вход смесителя 5, в то время как на второй вход смесителя 5 в качестве сигнала гетеродина поступает сигнал непрерывно работающего ЛЧМ генератора 1. Принимаемые сигналы по своей структуре идентичны излучаемым зондирующим импульсам, но имеют запаздывания во времени, равные 

На фиг.2д показана временная зависимость частоты отраженного сигнала fпр и сигнала гетеродина fгет. На выходе смесителя 5 с помощью УПЧ 2 выделяется сигнал разностной (промежуточной) частоты, называемой гомодинной частотой, значение которой пропорционально дальности до отражателя.
При наличии в интервале дальности от 
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| Гомодинный радиолокатор с многоканальным приемо-передающим трактом | 2018 |
|
RU2700654C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ПОСЛЕДОВАТЕЛЬНОГО ОБЗОРА ПО ДАЛЬНОСТИ С ПЕРЕСТРОЙКОЙ ПО ЛИНЕЙНОМУ ЗАКОНУ ДЛИТЕЛЬНОСТИ ЗОНДИРУЮЩИХ ФАЗОМАНИПУЛИРОВАННЫХ РАДИОИМПУЛЬСОВ | 2009 |
|
RU2405170C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ШИРОКОПОЛОСНОГО ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ПРИ ШИРОКОУГОЛЬНОМ ЭЛЕКТРОННОМ СКАНИРОВАНИИ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2021 |
|
RU2774156C1 |
| Приёмо-передающее устройство гомодинного радиолокатора | 2021 |
|
RU2787976C1 |
| СПОСОБ ПЕРВИЧНОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С МАЛОЙ СКВАЖНОСТЬЮ ЗОНДИРУЮЩИХ ПОСЫЛОК | 2020 |
|
RU2742461C1 |
| СПОСОБ КОГЕРЕНТНОГО ПРИЕМА ОТРАЖЕННОГО СИГНАЛА ПРИ НЕКОГЕРЕНТНОМ ИЗЛУЧЕНИИ ЗОНДИРУЮЩЕГО СИГНАЛА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2315331C1 |
| ПРИЁМОПЕРЕДАТЧИК РАДАРА НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ С РАСШИРЕННЫМ ДИНАМИЧЕСКИМ ДИАПАЗОНОМ | 2018 |
|
RU2687286C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ЗОНДИРОВАНИЕМ ПРОСТРАНСТВА ФАЗОМАНИПУЛИРОВАННЫМИ СИГНАЛАМИ С ПЕРЕСТРОЙКОЙ ДЛИТЕЛЬНОСТИ ПАРЦИАЛЬНЫХ РАДИОИМПУЛЬСОВ ПО ЛИНЕЙНОМУ ЗАКОНУ | 2009 |
|
RU2405169C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ НЕПОДВИЖНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ШУМОВОГО СИГНАЛА И ШУМОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2024 |
|
RU2831136C1 |
Изобретение может быть использовано в радиолокационных станциях (РЛС) для управления их разрешающей способностью. Достигаемый технический результат - возможность в широких пределах изменять разрешающую способность РЛС. Указанный результат достигается за счет того, что заявленный способ основан на генерировании непрерывного модулированного по частоте сигнала, излучении этого сигнала в пространство, приеме отраженного сигнала и преобразовании его на промежуточную частоту гомодинным методом. Для изменения в широких пределах разрешающей способности РЛС повторяют модуляции генерируемого сигнала в каждом такте работы, причем длительность такта определяют по заданной дальности действия РЛС и задаваемой разрешающей способности, затем по задаваемой разрешающей способности определяют соответствующее ей время окончания излучения, а прием отраженного сигнала производят в оставшееся до окончания такта работы время, причем принятый отраженный сигнал и генерируемый модулированный по частоте сигнал преобразуют на промежуточную частоту гомодинным методом. При этом значение промежуточной частоты пропорционально дальности до отражателя. 2 ил.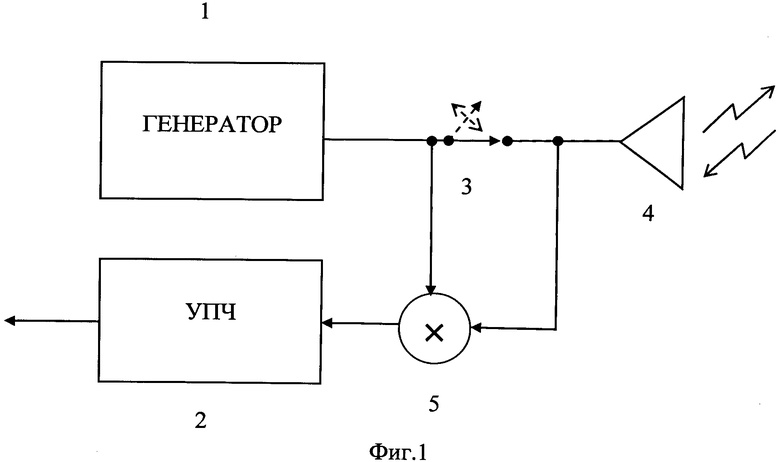
Способ управления величиной разрешающей способности радиолокационной станции, основанный на генерировании непрерывного модулированного по частоте сигнала, излучении в пространство этого сигнала, приеме отраженного сигнала и преобразовании его на промежуточную частоту, отличающийся тем, что частотную модуляцию генерируемого сигнала повторяют в каждом такте работы радиолокационной станции, причем длительность такта пределяют по заданной дальности действия РЛС и задаваемой разрешающей способности, затем по задаваемой разрешающей способности определяют соответствующее ей время окончания излучения, а прием отраженного сигнала производят в оставшееся до окончания такта работы время, причем принятый отраженный сигнал и генерируемый модулированный по частоте сигнал преобразуют на промежуточную частоту гомодинным методом.
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2002 |
|
RU2239845C2 |
| СПОСОБ РЕГИСТРАЦИИ СТАТИСТИЧЕСКОГО РАСПРЕДЕЛЕНИЯ ПЕРЕОТРАЖЕНИЙ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ОТ НИЗКОЛЕТЯЩЕЙ РАКЕТЫ БЛИКАМИ МОРСКОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2451301C1 |
| ИМИТАТОР МОРСКОЙ ПОВЕРХНОСТИ ДЛЯ СТАТИСТИЧЕСКОГО ИССЛЕДОВАНИЯ РАСПРЕДЕЛЕНИЯ МОРСКИХ БЛИКОВ ПРИ РАБОТЕ ЛАЗЕРНЫХ ДОПЛЕРОВСКИХ ЛОКАТОРОВ ПО НИЗКОЛЕТЯЩИМ РАКЕТАМ | 2012 |
|
RU2488138C1 |
| US 7688348 B2, 30.03.2010 | |||
| EP 1358508 B1, 24.02.2010 | |||
| US 5325097 A, 28.06.1997 | |||
| US 6384769 B1, 07.05.2002 | |||
| US 5600561 A, 04.02.1997 | |||

