Области технологии
Изобретение относиться к методу пространственного проектирования тренажера для пилотируемых летательных и космических аппаратов, предназначенных для обучения летчиков-пилотов и космонавтов и авиационный тренажер, спроектированный этим методом, по специально настольному тренажеру, предназначен для обучение летчиков-пилотов.
Предшествующие состояние техники
Не известны методы для общего пространственного проектирования тренажеров для летательных и космических аппаратов.
Известны авиационные тренажеры, состоящие: по крайней мере из одного монитора, связанного с управляющими блоками, на которых изображены приборные панели с визуальным обзором окружающего пространства, как на некоторых тренажерах, часть от приборных панелей и визуализацию их с проекторов. Стандартные джойстики, посредством управляющего блока реализует ручка управления летательного аппарата, ручка управление двигателя/ем и педали [1], [2], [3].
Другие авиационные тренажеры включают мониторы с изображенным окружающего пространства и отдельная, реальная конструкция на целую кабину. Ручка управления самолетом, ручка управления двигателем/ями и педали отвечают на действительных размеров, местоположения и приложенных усилии, как для реального летательного аппарата [4], [5].
Известные тренажеры имеют следующее недостатки: дорогая цельная конструкция из-за высокой трудоемкости, время для разработки очень большое, конструкция, не соответствующая в целом на реальную кабину летательного аппарата.
Техническая сущность изобретения
Настоящее изобретение имеет цель решить указанные недостатков, как с приложением методов можно облегчить проектирование тренажеров для летательных и космических аппаратов. Предлагаемый метод представляет возможность для автоматизированного или полуавтоматизированного проектирования, посредством специализированного программного обеспечения и последовательность от предварительно предписанных этапов проектирования. Через него создаются конструктивно тренажеров для различных типов летательных и космических аппаратов.
Тренажер спроектирован облегченно при сниженной трудоемкости и себестоимости, а общий вид (приборной панели и обзора) максимально близок или вполне идентичен с реальным для соответствующего летательного или космического аппарата, как предполагается, что данные от проведенных симулированных полетов сохраняются, обрабатываются и выводиться результаты.
Конструкция авиационного тренажера, согласно методу, позволяет любому специалисту в области тренажеров проектировать такой, независимо есть ли у него какие-то тип летательного или космического аппарата или симулятора, как достаточно располагает с входными данными.
Создан метод для пространственного проектирования летательных и космических аппаратов, включающий:
1) Начальный этап:
1.1) вычисляются полуавтоматизировано или автоматизировано, посредством компьютера и специализированного программного обеспечения, отклонения и усилия, передающиеся на образец/цы на ручку/и управления и строятся балансировочные диаграммы по отклонениям и усилиям (по отношению к скорости), как используются известные физические зависимости для соответственного летательного или космического аппарата при следующих заданных входных данных, как и дополнительных (необходимых в процессе вычисления) данных, с осмотром использованных физических зависимостей, которые прилагаются при управлении органами управления:
G - сила, приложенная к ручке/ам управления;
хт - относительная координата положения точки перехода от ламинарного в турболентном пограничном слое;
V - максимальная и минимальная скорость, которая делиться на равные промеждутки времени, начиная с Vmin по Vmax;
х - измеренное расстояние из кабины на перемещение ручки/ек управления.
1.2) вычисляются полуавтоматизировано или автоматизировано посредством компьютера и специализированного программного обеспечения, отклонения и усилия, передающиеся на образец/цы педалей (отклонения и усилия, передающиеся на обраец/цы ручки/ек управления) и строяться балансировочные диаграммы по отклонениям и усилиям, как исползуются известные физические зависимости для соответственного летательного или космического аппарата при следующих заданных входных данных, как и допольнительных (необходимых в процессе вычисления) данных, с осмотром использованных физических зависимостей, которые прилагаются при управлении органами управления:
β - угол скольжения;
V - максимальная и минимальная скорость, которая делиться на равные промеждутки времени, начиная с Vmin по Vmax;
х - измеренное расстояние из кабины при перемещении педалей и ручки/ек управления. При перемещении ручки/ек управления при отклонении на 20°, его значение берется из действительных размеров аппаратов.
1.3) сопоставление результатов от 1.1) и 1.2)
После выполнения вычислений и построения балансировочных диаграмм от образцов и от полученных вычислений для ручки/ек управления и педалей сделать следующее сопоставление и заключения для дальнейших действий:
1.3.1) если углы при отклонении органов управления увеличиваются и если пружина/ы, действующая/щие на растяжение использована/ы в образце/цах ручка/и управления будет растянута/ы побольше. Полученные значения должны быть больше (при натяжения). Если поставленное условие выполнено продолжить следующие действия (ниже). Если нет, - возвратиться к т. 1.1), чтобы исправить ошибки и снова сделает вычисления;
1.3.2) если углы при отклонении органов управления уменьшаются и следовательно пружины, действующие при растяжения, использованы в образце/цах ручка/и управления и образце/цах педали будет растянуты меньше. Полученные значения должны быть меньше (при натяжения). Если поставленное условие выполнено продолжить действия в т. 1.4) (ниже). Если нет, - возвратиться в т. 1.2), чтобы исправить ошибки и и снова сделать вычисления;
1.4) после выполнения вычислительного процесса изготовится реальный или виртуальный макет. Макет имеет размеры, которые могут быть использованы для различных летательных и космических аппаратов, как для аппаратов с двухместным расположением в кабине размер площади для сиденья удваивается и остается расстояние между ними, сообразно с расположением горизонтальных панелей (с наличными приборами) и подставка для ручки управления двигателем/ями при летательных аппаратах и космических челноках, а при космических кораблях только утроится и т.д. в зависимости от числа космонавтов. В зависимости от вида летательного и космического аппарата (с одно-, двух-, трехместным и т.д. расположением в кабине), макет может приобрести изменение только в отношении его ширины. Все остальные размеры сохраняются с целью выполнения требований по JAR (Joint Aviation Requirements - Общие Требования Авиации). Макет тренажера подготавливается в уменьшенном масштабе. Чтобы достигнуть допустимых предельных размеров тренажеров для летательных и космических аппаратов используется увеличивающий масштаб, а выполненный по следующим действиям тренажер, получается в масштабе М1:1, сообразно кабины.
При вычислениях сохраняются отклонения и усилия органов управления, как только оформятся размеры тренажера (ручка/и управления, педали, столешница, сиденье/я, ось, тяжесть, тестирующее устройство, подставка ручки управления двигателя/ей и пружины) в увеличивающимся масштабе. Стандартные размеры (некоторые размеры педалей, ручки/ек управления, сиденья/ий, ручки управление двигателем/ями, расстояния некоторые для них и др.), измеренные из кабины сохраняются.
1.5) выполняются вычисления для пружин, используемых в образце/цах ручки/ек управления и образца/цов педалей, как принимается допустимый предельный размер на диаметра D пружин постоянной величины [6].
При управлении ручкой/ами управления и педалей выбираются цилиндрические винтовые пружины с малым шагом, которые будут работать на натяжение.
Из полученных результатов для органов управления (ручка/и управление и педали) выбирается жесткость и оформляются размеры на каждую пружину. Принятый по конструктивным соображениям диаметр первоначально берется в увеличивающемся масштабе, как постоянная величина для всех пружин, приложенные к ручке/ам управления и педалям, а затем делает выбор в масштабе М1:1, как диаметр снова сохраняется постоянная величина для всех пружин, приложенных к ручке/ам управления и педалям.
1.6) оформляются комбинированные размеры на трех технологических объектах и создается тренажер:
1.6.1) на макет тренажера в уменьшенном масштабе;
1.6.2) на летательном или космическом аппарате;
1.6.3) на компьютерном оборудовании (мониторе).
Чтобы выполнить следующие действия из этапов и получатся размеры тренажера, обеспечаются размеры панелей в кабине и расстояние от глаз пилотов до фанара или до потолка кабины.
2) Промежуточный этап, включающий:
2.1) после обеспечения необходимых размеров переходить к:
2.1.1) разделению панелей на определеное количество мониторов;
2.1.2) вычисляются по формулам: коэффициент - Rn; суммарные коэффициенты - Rzy, Rxy, Rxz; коэффициент, определяющий размеры мониторов (для выбора мониторов) - Rобщо; коэффициенты для уменьшения размеров тренажера в равнинах zy, ху, xz - Rczy, Rcxy, Rcxz:
Rn=MM/TC
MM - размеры макета мониторов,
ТС - размеры панелей летательного или космического аппарата,
Rzy=Rnz+Rny

Rnx, Rny, Rnz - коэффициенты, эквивалентные Rn по отношению к осям x, у, z,
n - количества мониторов, по отношению расположению:
1 - основного/ых монитора/ов
2 - горизонтальных мониторов
3 - вертикальных мониторов
4 - монитор/ы, расположен/ны выше вертикальных мониторах и основном/ых мониторе/ах,
Rобщ=(Rzy+Rxy+Rxz)/3
Rzy, Rxy, Rxz - суммарные коэффициенты в равнинах Ozy, Оху, Oxz,
Rczy=Rzy/2, Rcxy=Rxy/2, Rcxz=Rxz/2
Rzy, Rxy, Rxz - суммарные коэффициенты в равнинах Ozy, Оху, Oxz.
Полученные значения для Rn;, Rzy, Rxy, Rxz; Rобщ; Rczy, Rcxy, Rcxz используются для исполнения чертежей тренажера в 2D и 3D пространствах, переброска проекта в пространстве, определения предельных размеров, определения размеров и количества мониторов и его виртуальной сборки. Результаты из формул вводятся в таблицу для каждой равнины Ozy, Оху, Oxz
2.1.3) делается выбор мониторов. Желательно использовать 3D LCD touch screen display, исключительно тонкие мониторы. Может быть взяты либо только 2D, либо только 3D. Из-за ограниченного количества 3D мониторов могут быть выбраны такие, которые конвертируются.
Результаты для панелей заносятся в таблицу, где записывается вид панели, виды мониторов, номер монитора, ширина, высота, диагональ и основа.
При выборе мониторов взять во внимание расстояние от глаза пилота до фанара или до потолка кабины.
2.2) после выбора мониторов подготовиться аксонометрические чертежи в трех экземплярах, по отношению к трем координатным равнинам Ozy, Оху, Oxz. Наноситься на них размеры тренажера в увеличивающемся масштабе и предельные размеры (размеры от т. 1.2)), разделены с коэффициентами Rczy, Rcxy, Rcxz в равнинах с увеличивающимся масштабом.
2.3) из полученных по конструктивному способу параметры выбираются действительные размеры. Действительные размеры берутся от предельных размеров от допустимых пределов. Могут быть уменьшены ниже предельных, только сообразно конструкции и кабине. Делаются пространственные чертежи по данному типу изометрии, как NE Isometric для составных частей. Затем весь тренажер составляется виртуально на программном обеспечении.
2.4) так полученный тренажер определяется как приемлемый сообразно его действительным размерам в 3D пространстве и делаются чертежи реального тренажера на 2D, с исключением чертежей пружин.
3) Конечный этап, включающий:
3.1) выполняются вычисления пружин для 3D плоскости при следующих входных данных:
Pmin - минимальная нагрузка, приложенная к ручке/ам управления и педалям;
Pmax - максимальная нагрузка, приложенная к ручке/ам управления и педалям;
х - координаты отклонения органов управления;
G - модуль угловой деформации при пружинной стали Ст70;
τдоп. - допустимое касательное напряжение;
R (D) - уменьшенный радиус (диаметр) пружины тренажера для летательного и космического аппарата в M1:1. R (D) постоянная величина для всех пружин, примененных к тренажерам для летательных и космических аппаратов в этапе 3) в масштабе М1:1.
3.1.1) вычисляется максимальный крутящий момент Мус;
3.1.2) вычисляется максимальное растяжение пружин max f;
3.1.3) выполняется проверка максимального касательного напряжения maxτх при установленном сечении чистого кручения max τх≤τдоп.,
3.1.3.1) вычисляется диаметр поперечного сечения d;
3.1.3.2) вычисляется количество действующих обмоток i;
3.1.3.3) записывается результат из количества действующих обмоток i;
3.1.3 4) выбираются пружины;
3.1.4) вычисляется минимальное световое отверстие δmin;
3.1.5) вычисляется начальное световое отверстие δ0;
3.1.6) вычисляется начальная (свободная) длина L0;
3.1.7) вычисляется длина после нагрузки max Р L2;
3.1.8) вычисляется длина после нагрузки min Р L1;
3.1.9) вычисляются длины пружин при растяжения f1 и f2;
3.1.10) вычисляется угол наклона винтовой линии α:
3.1.10.1) вычисляется шаг пружины h и записываются размеры d, D, 8δ0, L0 и i пружин;
3.1.11) вычисляется длина винтовой линии 1;
3.1.12) вычисляется пружинная константа с;
3.1.13) сообразно расстояниям, которые получаются при оформлении размеров образцов на ручку/и управления и педали выбирается количество обмотки i;
3.1.14) выполняется повторение на т.3.1.1), т.3.1.2), т.3.1.3) и т.3.1.3.1);
3.1.15) при выбранных значениях количества действующих обмоток i вычисляется снова максимальное растяжение пружин max f.
При передаче пружин из 3D в 2D пространстве возникают изменения, которые отражаются на изображениях от рабочих чертежей.
С целью использования координатной системы Oxyz, как для каждой равнины определяется коэффициент kzy, kxy, kxz. Коэффициенты kzy, kxy, kxz эквивалентны с (k). Для каждого максимального растяжения пружин max f, по отношению к длине после нагрузки minP L1 и количества обмоток i берется необходимый коэффициент от пространства для всех равнинных Ozy, Оху, Oxz, сообразно с коэффициентами Rczy, Rcxy, Rcxz, от т.2.1) и записывается по координатной системе Oxyz.
Затем вычисляются пружины как взять допустимое значение коэффициента для пружин в пространстве (k), умноженного на коэффициент при максимальном растяжении пружины. Т.е. (k)* max f.
3.1.16) от максимального растяжения пружин max f находится значения коэффициента для пружины в пространстве:
3.1.16.1) предшествующие максимальные растяжения max f разделить на коэффициенты для уменьшения размеров тренажера в равнине zy, ху, xz, т.е. на Rczy, Rcxy, Rcxz;
3.1.16.2) от т.3.1.15) берутся новополученные максимальные растяжения пружин max f;
3.1.16.3) новополученные максимальные растяжения max f умножаются по коэффициенты уменьшения размеров тренажера в равнине zy, ху, xz, т.е. на Rczy, Rcxy, Rcxz;
3.1.16.4) получаются коэффициенты для пружин в пространстве (k) для каждой равнины Ozy, Оху, Oxz.
Расположение пружин определяет в какой равнине выполняется действие и какой коэффициент будет использован. Делаются следующие дополнительные вычисления, которые определяют работу органов управления (ручки/ек управления и педалей), т.е. работы пружин.
3.1.17) выбираются пружины;
3.1.18) значения минимального светового отверстия δmin берутся от т.3.1.4);
3.1.19) выполняются дополнительные вычисления начального светового отверстия δ0;
3.1.20) выполняются дополнительные вычисления начальной (свободной) длины L0;
3.1.21) выполняются дополнительные вычисления длины после нагрузки max Р L2 по формуле:
L2=L0+max f+(k)*max f;
3.1.22) выполняются дополнительные вычисления длины после нагрузки min Р L1;
3.1.23) выполняются дополнительные вычисления длины пружин при растяжении f1 и f2,
3.1.23.1) для f1; 3.1.23.2) для f2;
3.1.24) выполняются дополнительные вычисления угла наклона винтовой линии α:
3.1.24.1) выполняются дополнительные вычисления шага пружин h:
Описываются размеры пружин, как: d, D, δ0, L0, i.
3.1.25) выполняются дополнительные вычисления длина винтовой линии 1;
3.1.26) выполняются дополнительные вычисления пружинной константы с по формуле:
с=max Р/(max f+(k)*max f)
3.2) выполняется сравнение вычисленных размеров от т.3.1) пружин с предельными возможными, соответствующими размерами, которые определяются из действительных размеров образца/цов ручки/ек управления и образца/цов педалей, как если полученные при вычисление размеры не соответствуют, вернуться в т.3.1), а если полученные при вычислении размеры соответствуют, следовательно полученные результаты для размеров пружин ставятся как окончательные в чертежи на образец/цы ручки/ек управления и образец/цы педалей и выполняются остальные чертежи, невыполненные в т.2.4).
Авиационный тренажер проектируется методом пространственного проектирования тренажеров для летательных и космических аппаратов и состоит по крайней мере из одного управляющего блока. Столешница, которая поддерживается опорами внутри и снаружи. Опоры крепятся к ней и к полу неподвижно. Только боковые части от столешницы, где переходят сиденья не крепятся с опорами снаружи. На нее ставятся мониторы на определенное расстояние по соображению с расстояниями в кабине летательного аппарата. Размеры целой конструкции получаются согласно методу для пространственного проектирования тренажеров.
Приборы в кабине и визуальны обзор окружающего пространства изображаются на мониторах, следующим образом:
1) монитор передней панели включает приборы в кабине от передней панели летательного аппарата и визуальный обзор окружающего пространства, т.е. района, в котором выполняются полеты;
2) мониторы, изображающие боковые панели (вертикальные и горизонтальные), включающие приборы в кабине от горизонтальных панелей летательного аппарата и наличных приборов в кабине от вертикальных панелей летательного аппарата, совместно с визуальным обзором окружающего пространства.
Педали, прикрепленные к столешницы, регулируются. Регулирование их выполняется с подъемника (регулятора), который их придвигает после
Описываются размеры пружин, как: d, D, δ0, L0, i.
3.1.25) выполняются дополнительные вычисления длины винтовой линии 1;
3.1.26) выполняются дополнительные вычисления пружинной константы с по формуле:
с=max Р / (max f+(k) * max f)
3.2) выполняется сравнение вычисленных размеров от т.3.1) пружин с предельными возможными, соответствующими размерами, которые определяются из действительных размеров образца/цов ручки/чек управления и образца/цов педалей, как если полученные при вычислении размеры не соответствуют, возвращаемся в т.3.1), а если полученные при вычислении размеры соответствуют, следовательно полученные результаты для размеров пружин ставятся как окончательные в чертежах образца/цов ручки/чек управления и образца/цов педалей и выполняются остальные чертежи, невыполненные в т.2.4).
Авиационный тренажер проектируется методом пространственого проектирования тренажеров для летательных и космических аппаратов и состоит, по крайном мере, из одного управляющего блока. Столешница, которая поддерживается опорами внутри и снаружи. Опоры крепятся к ней и к полу неподвижно. Только боковые части столешницы, где переходят сиденья не прикрепляются опорами снаружи. На нее ставятся мониторы на определенное расстояние по соображению с расстояниями в кабине летательного аппарата. Размеры целой конструкции получаются согласно методу пространственого проектирования тренажеров.
Приборы в кабине и визуальный обзор окружающего пространства изображаются на мониторах, следующим образом:
1) монитор передней панели включает приборы в кабине передней панели летательного аппарата и визуальный обзор окружающего пространства, т.е. района, в котором выполняются полеты;
2) мониторы, изображающие боковые панели (вертикальные и горизонтальные), включающие приборы в кабине от горизонтальных панелей летательного аппарата и наличных приборов в кабине от вертикальных панелей летательного аппарата, совместно с визуальным обзором окружающего пространства.
Педали, прикрепленые к столешницы, регулируются. Регулирование их выполняется при помощи подъемника (регулятора), который их продвигает после притягивания ручки для регулирования кабины. На столешнице оформен профиль, где крепится подъемник (регулятор) с педалями, как фиксируются с планкой вмонтираного в столешницу изделия X (усеченный конструктивный элемент для крепления планки) и по этому способу придерживаются.
Ручка управления самолетом, сквозь которую проходит ось, фиксирующая при помощи ступни ручки управления, со стороны педалей подключена неподвижно к полу помещения. Сиденье подвижно. Оно перемещается по оси и останавливается механизом или гайкой. Ось крепится к столешнице неподвижно в одном конце, а в другом конце - опорой (тяжестью).
Ручка управления самолетом оснащена пружинами, педали, оснащенные тоже пружинами и ручка управлением двигателя, представляют джойстики, которые связаны с управляющим/ими блоком/ами, как для ручки управления самолетом берут соответствующий джойстик и связывается с образцом, для ручки управления двигателя - джойстик и ставится на подставке, а педали с подъемником (регулятором) связываются с управляющим/ими блоком/ами.
Шум в настольном тренажере, издаваемый двигателем, получается из усилителя с тонколонами. Они выносятся наружу или используются, так называемые, невидимые громкоговорители, которые встроены в мониторы.
Данные полетов и настройки, которые выполняются, включены в заложенную программу в управляющий/ие блок/и. К управляющему блоку, связанному с монитором, изображающим основную панель подключается тест-тестирующее устройство на место принтера.
Пояснения (описания) приложенных фигур
Изобретение будет объяснено лучше с помощью следующего описания, на нескольких выполнений метода пространственного проектирования тренажеров для летательных и космических аппаратов и авиационный тренажер, согласно методу и его части, с ссылкой на прилагаемые фигуры, на которых:
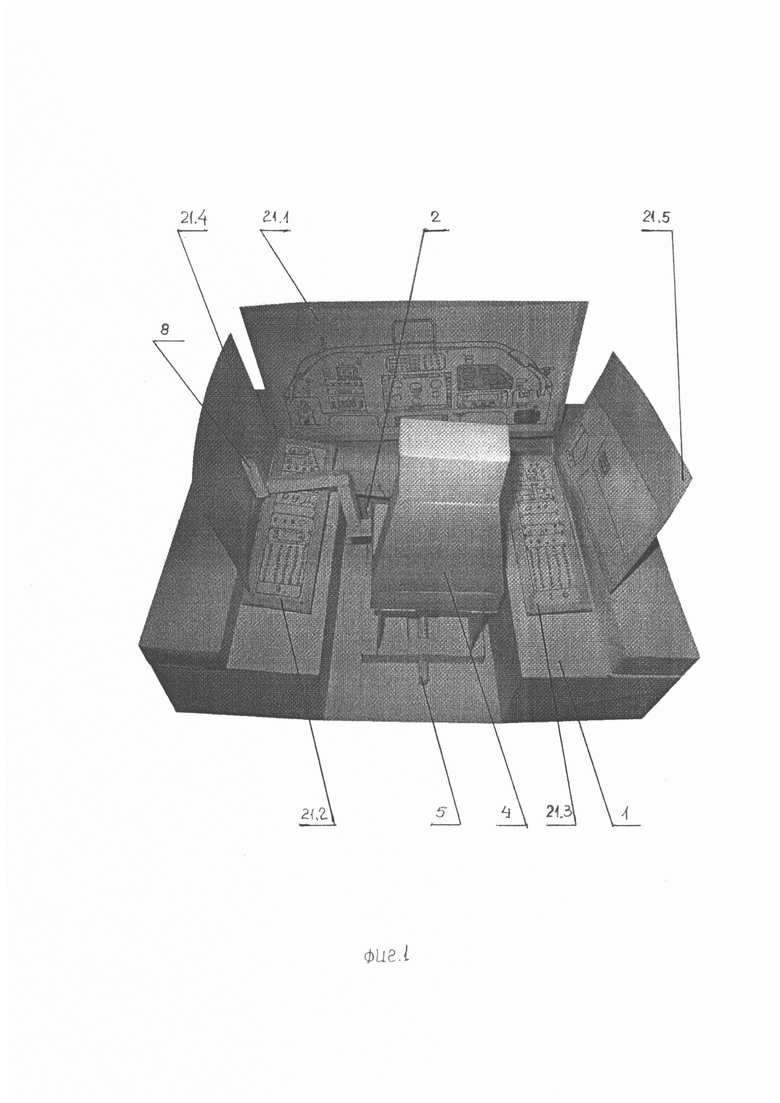
фигура 1 - аксонометрический вид макета, полученный в этапе 2);
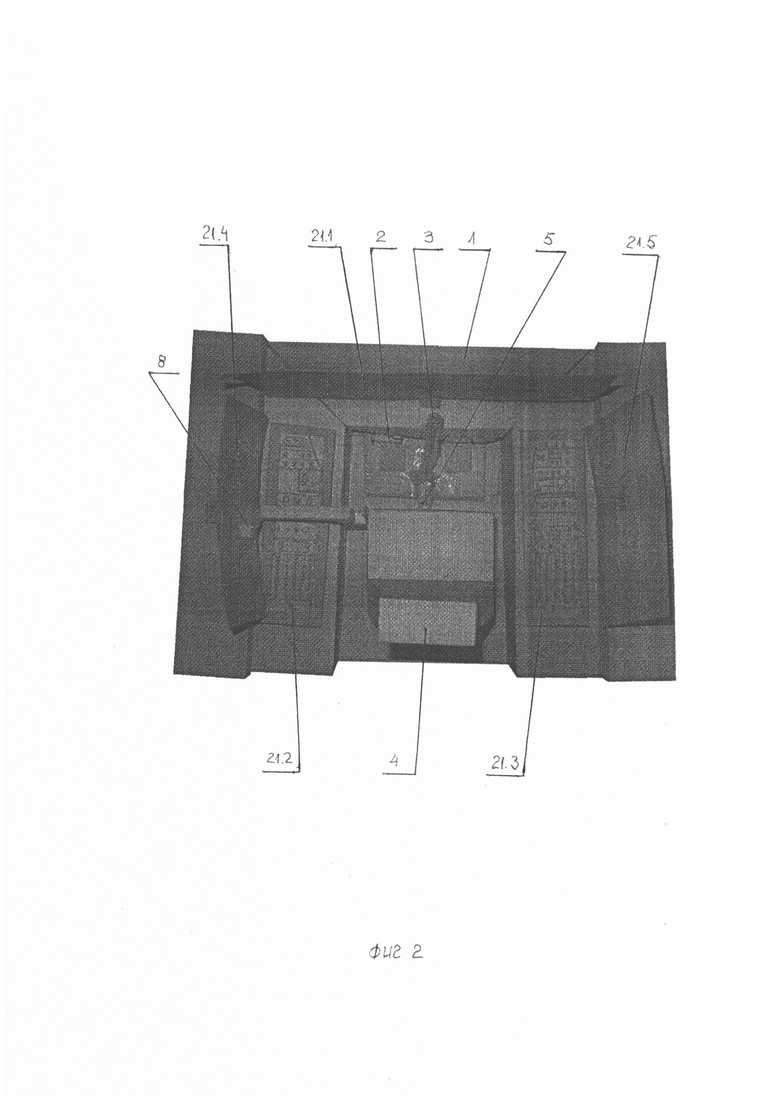
фигура 2 - вид сверху на макет, согласно фиг. 1;
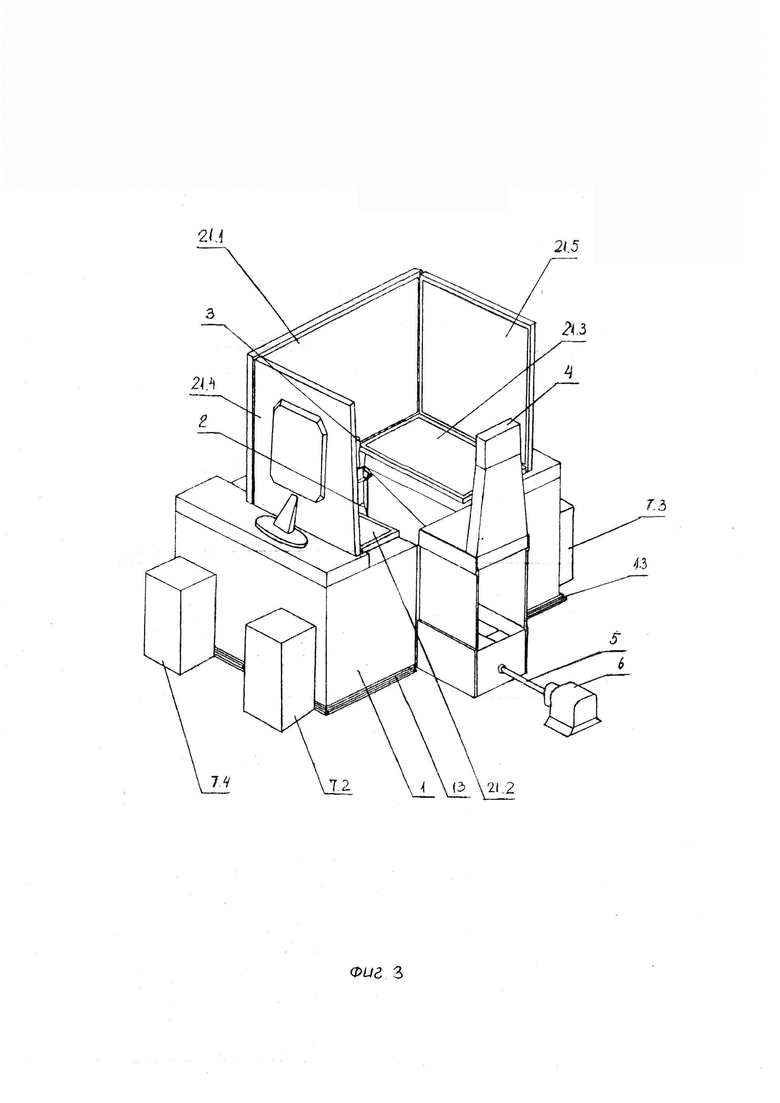
фигура 3 - аксонометрический вид авиационного тренажера:
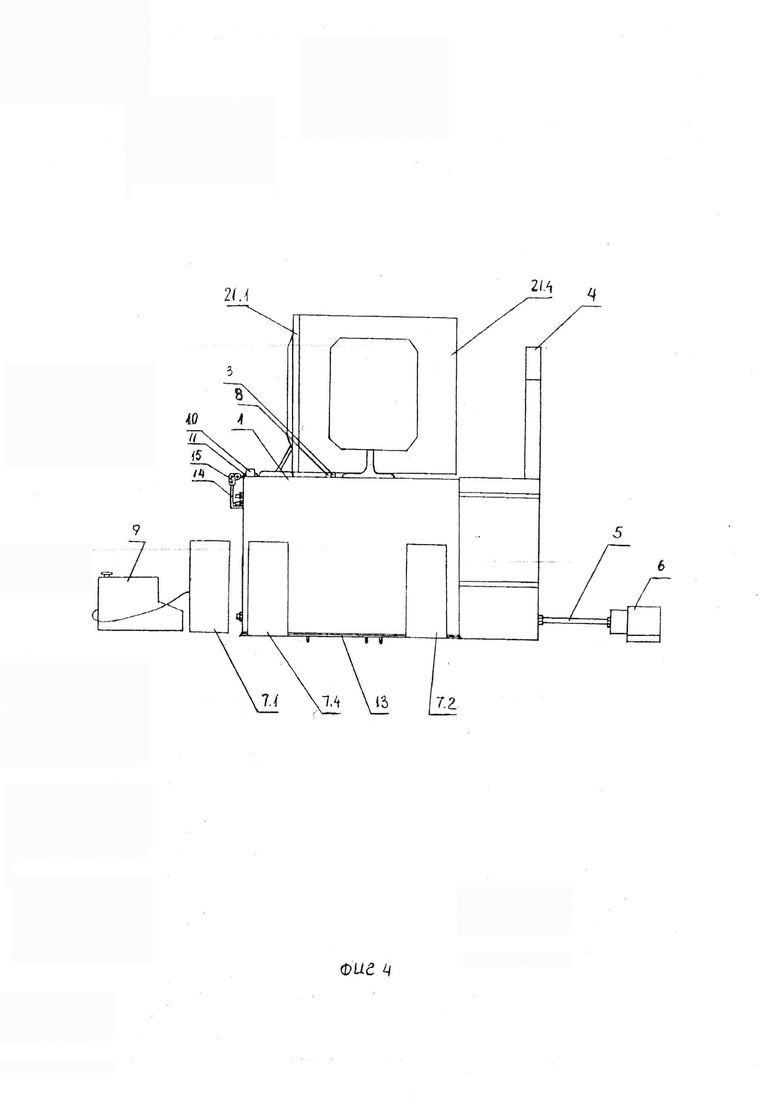
фигура 4 - основной вид тренажера, согласно фиг. 3;
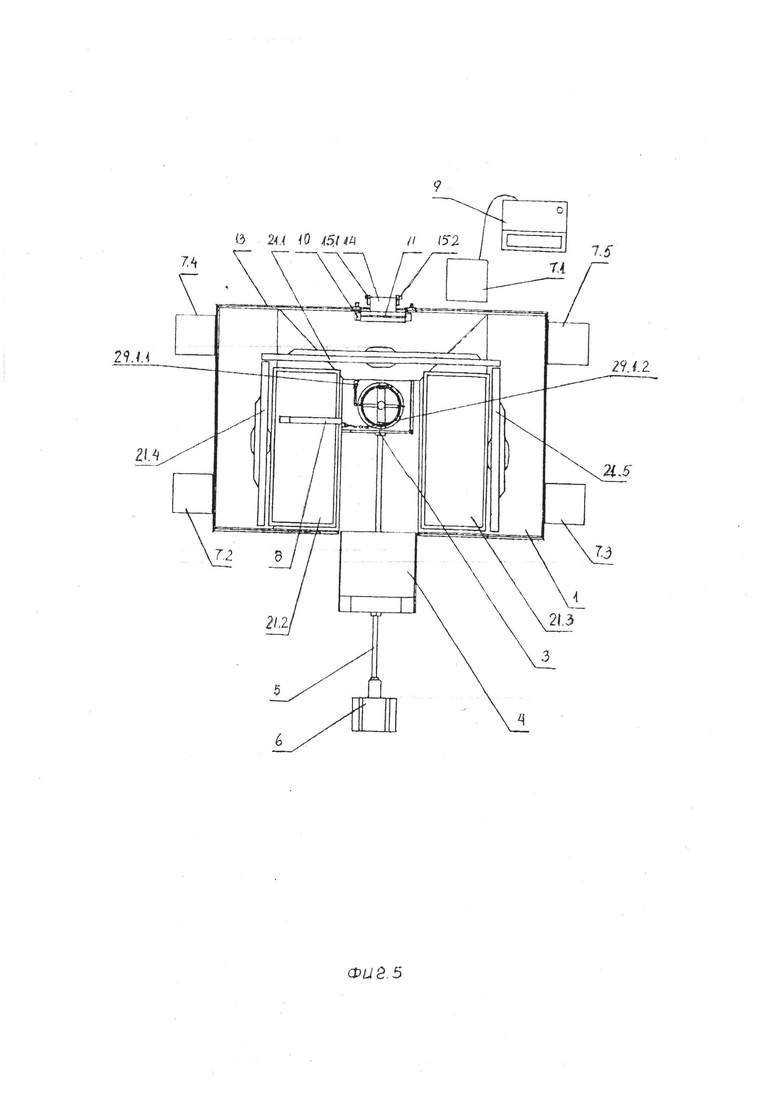
фигура 5 - вид сверху на тренажер, согласно фиг. 3;
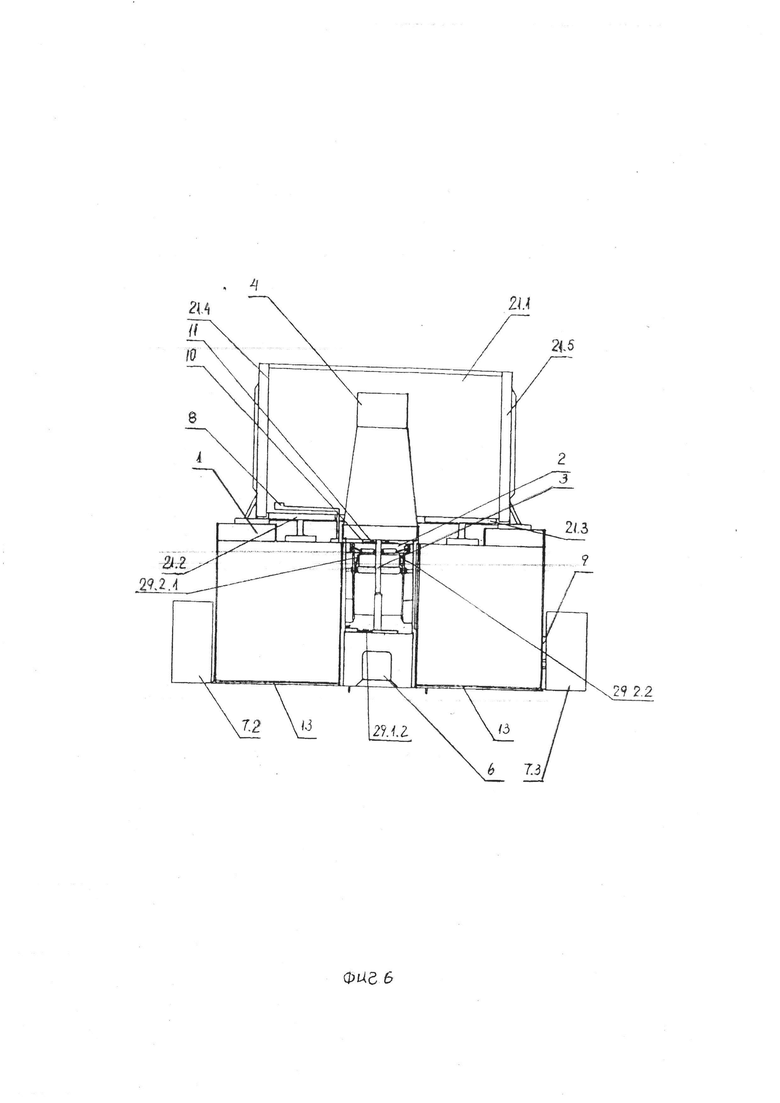
фигура 6 - вид сзади на тренажер, согласно фиг. 3;
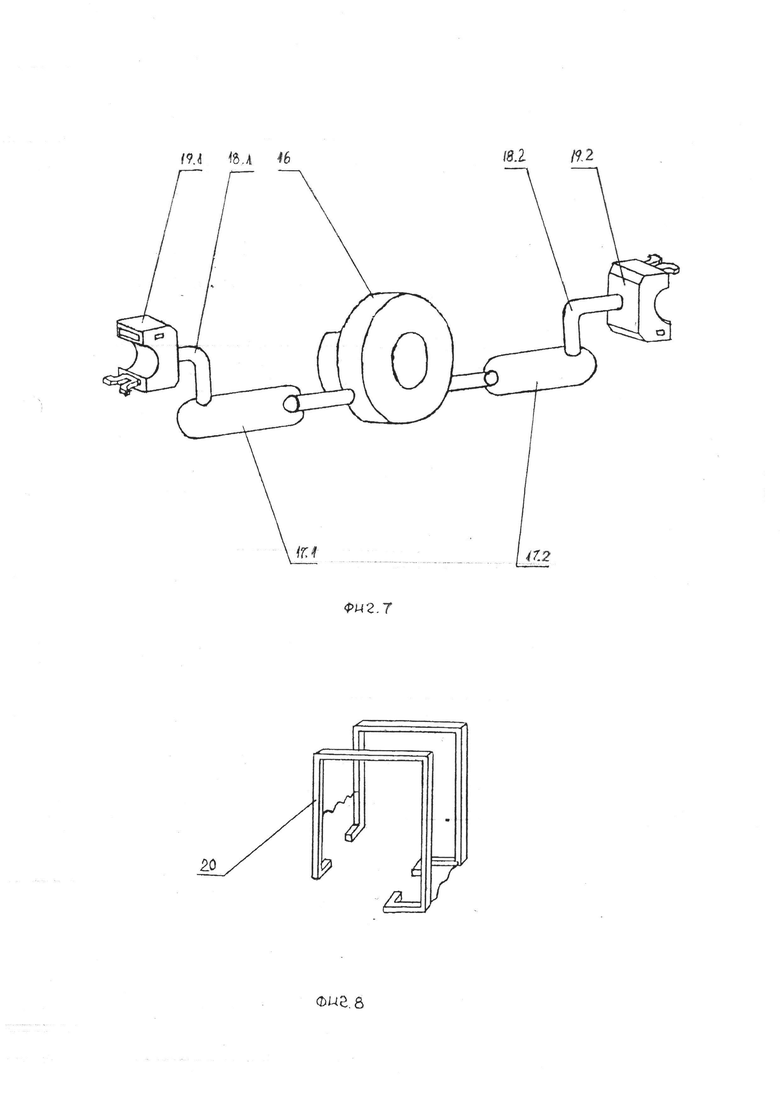
фигура 7 - аксонометрический вид в большом масштабе на механизм, который стопорит сиденье и может быть использован вместо гайки, согласно фиг. 3;
фигура 8 - аксонометрический вид в большем масштабе на специальный ключ, который используется для вскрытия механизма для стопора сиденья, согласно фиг. 7;
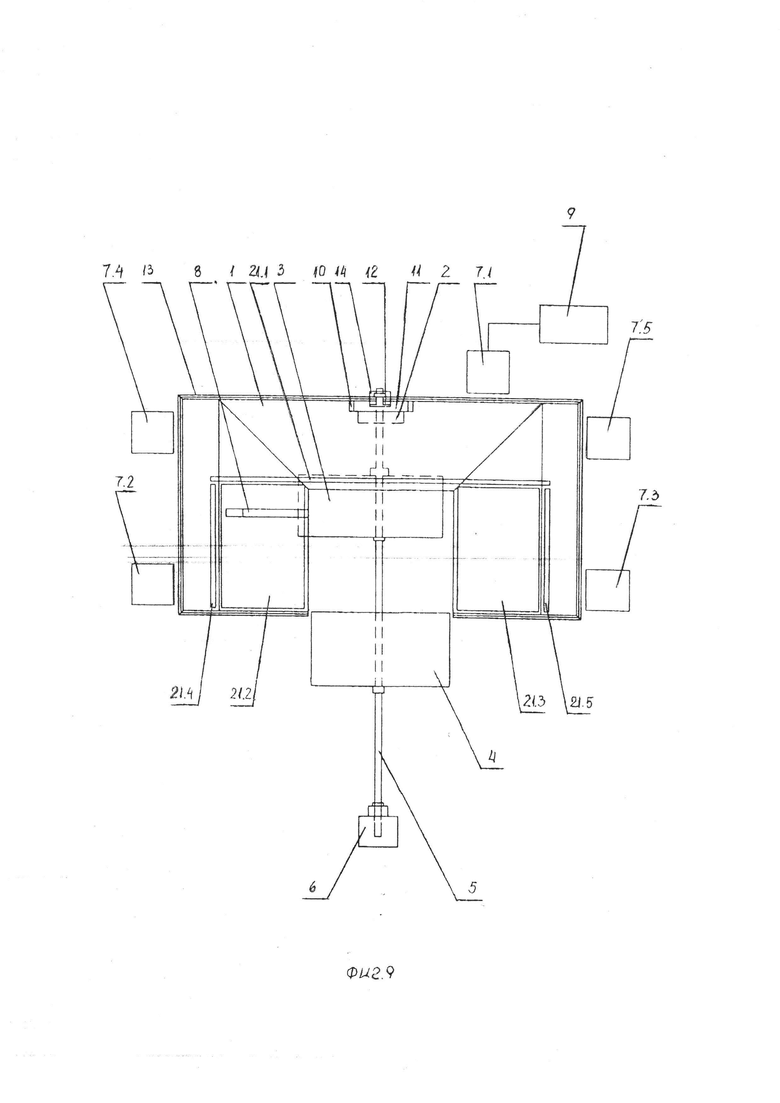
фигура 9 - схема тренажера с одноместным расположением в кабине, согласно фиг. 3;
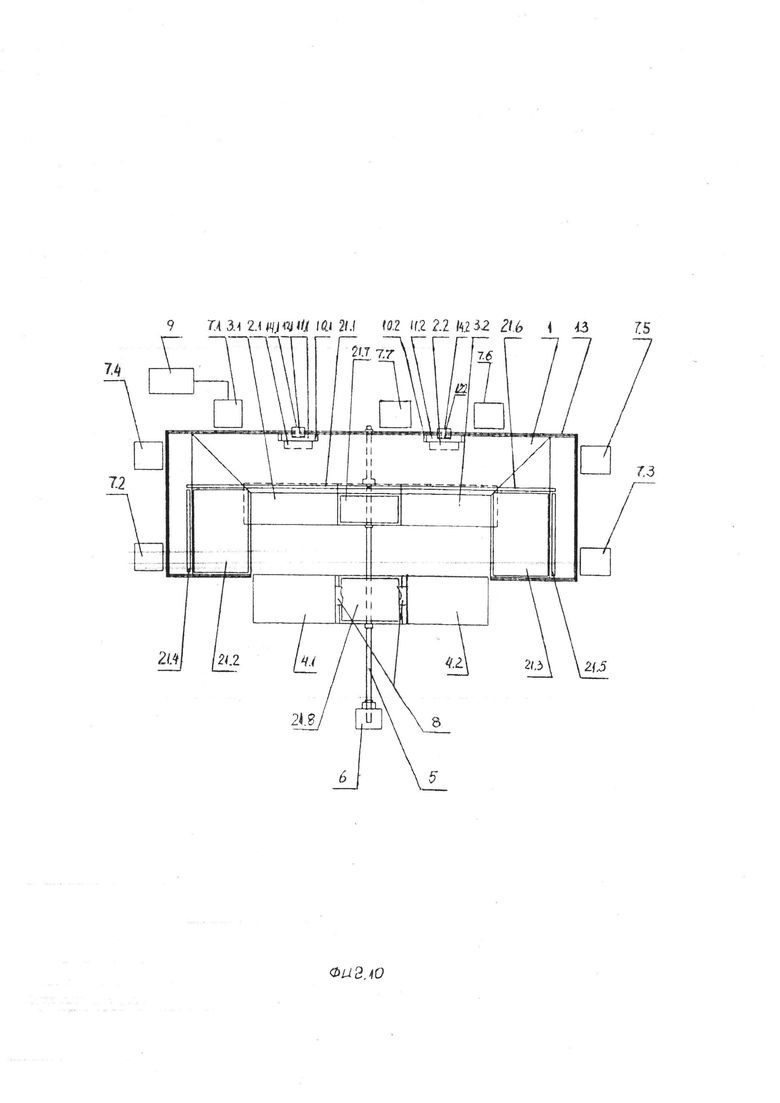
фигура 10 - схема тренажер с двухместным расположением в кабине, согласно фиг. 9;
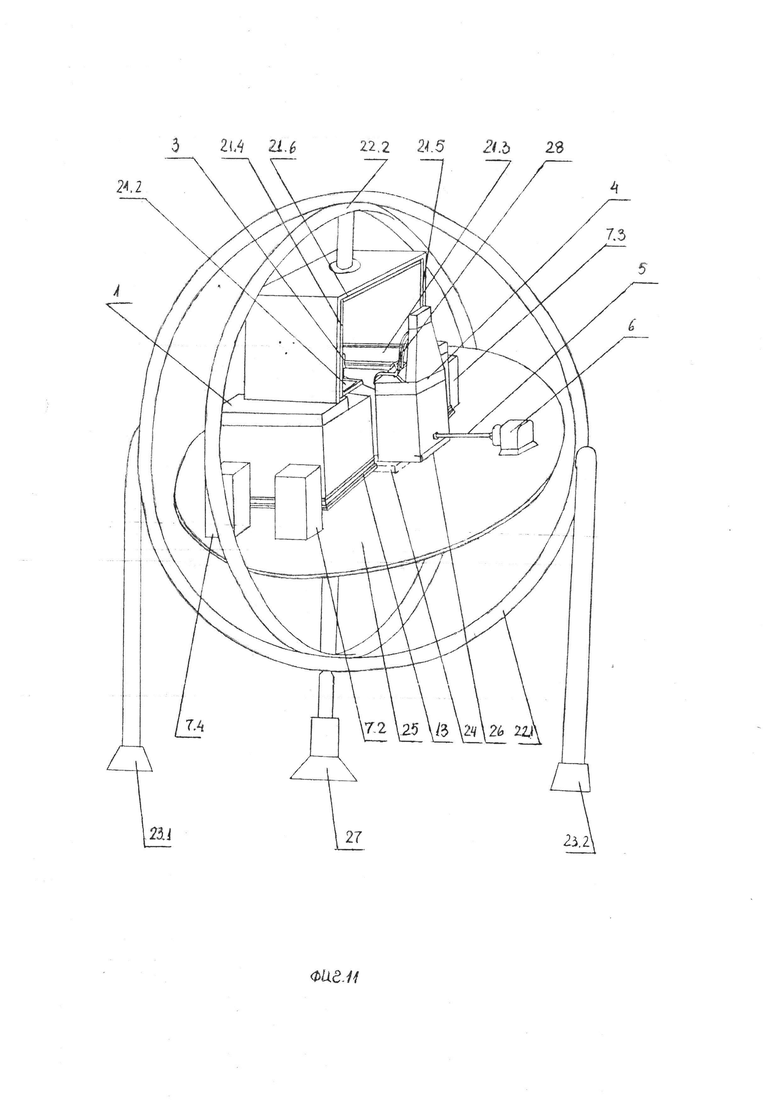
фигура 11 - аксонометрический вид тренажера с одноместным расположением в кабине с системой привода и устройства для создания перегрузки, согласно фиг. 3:
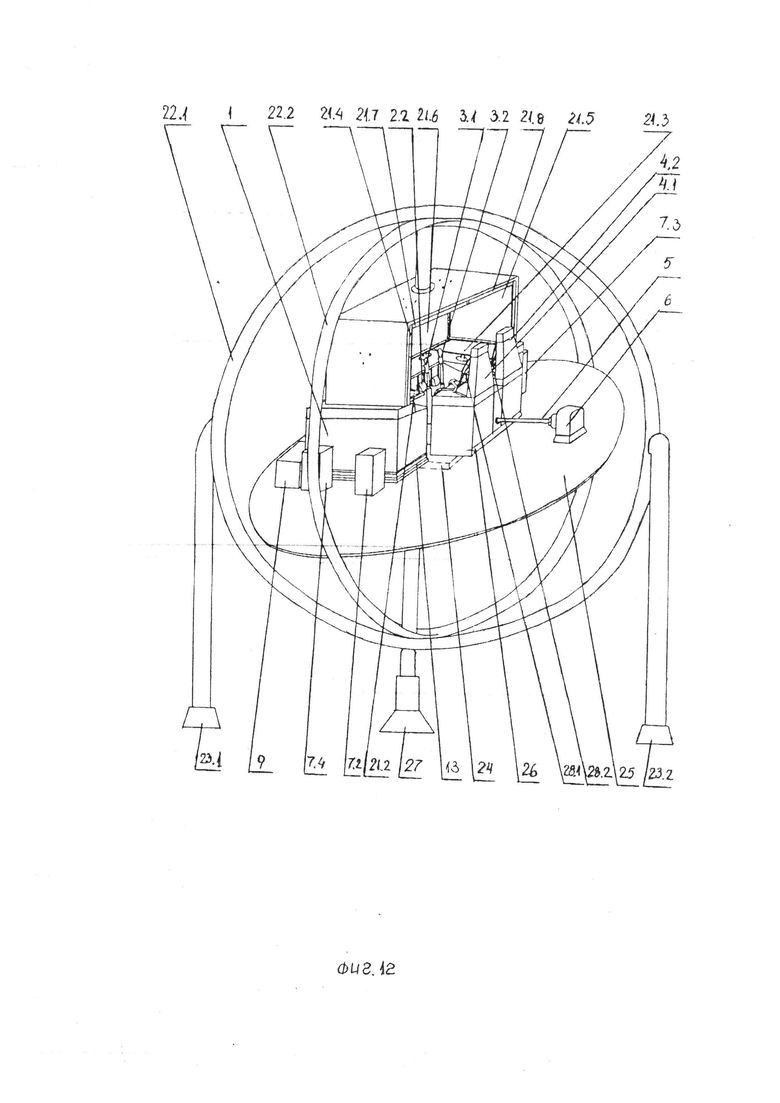
фигура 12 - аксонометрический вид тренажера с двухместным расположением в кабине с системой привода и устройства для создания перегрузки, согласно фиг. 11.
Примеры выполнения изобретения
Метод пространственного проектирования тренажеров для летательных и космических аппаратов пояснен с помощью следующего примерного выполнения без ограничений:
Пример №1:
Согласно изобретения, разработан метод, касающийся летательных аппаратов военной авиации. Метод состоит в следующем:
1) Начальный этап:
Для летательных аппаратов военной авиации используется последовательность метода, как первые два этапа выполняются для летательных аппаратов военной авиации при соответствующих заданных входных данных, а также дополнительных (необходимых в процессе вычисления) данных, учитывая использованные физические зависимости, которые находят применение при управлении органов управления.
1.3) сопоставление результатов т.1.1) и т.1.2)
После выполнения вычислений и построения балансировочных диаграмм из образцов и полученных вычислений для ручки/чек управления и педалей делается следующее сопоставление и выводятся заключения для дальнейших действий:
1.3.1) увеличаются ли углы при отклонении органов управления и будет/ будут ли пружина/ы, действующая/щие на растяжение использована/ы в образце/цах ручка/и управления растянута/ы по-больше. Полученные значения должны быть больше (при натяжение). Если поставленное условие выполнено продолжить следующие действия (ниже). Если нет, - возвратиться к т.1.1), для исправления ошибки и снова сделать вычисление;
1.3.2) уменьшаются ли углы при отклонении органов управления и следовательно будут ли пружины, действующие при растяжении, использованы в образце/цах ручка/и управления и образце/цах педали растянуты меньше. Полученные значения должны быть меньше (при натяжение). Если поставленное условие выполнено продолжить действия в т.1.4) (ниже). Если нет, - возвратиться в т.1.2). для исправления ошибки и снова сделать вычисления.
1.4) после выполнения вычислительного процесса изготовляется реальный или виртуальный макет. Макет летательных аппаратов военной авиации с одноместным расположением в кабине сходен с этим на фиг. 1 и фиг. 2. При двухместном расположении в кабине, расстояние площади для расположения сиденья удваивается. В зависимости от вида летательного аппарата (с одно- и двухместным расположением в кабине), макет может приобрести изменение только по отношению его ширины. Все остальные размеры сохраняются с целью выполнения требований по JAR (Joint Aviation Requirements - Общие Требования Авиации). Макет тренажера изготовливается в уменьшенном масштабе. Чтобы достигнуть допустимых предельных размеров тренажеров для летательных аппаратов военной авиации используется увеличивающий масштаб, а выполненный после совершения следующих действий тренажер, получается в масштабе М1:1, сообразно кабины.
При вычислениях сохраняются отклонения и усилия органов управления, оформляя только размеры тренажера (ручка/и управления, педали, столешница, сиденье/я, ось, тяжесть, тест-тестирующее устройство, подставка ручки управления двигателя/ей и пружины) в увеличивающимся масштабе. Стандартные размеры (некоторые размеры педалей, ручки/чек управления, сиденья/ий, ручки управления двигателем/ями, расстояния некоторые для них и др.), измеренные из кабины сохраняются.
1.5) выполняются вычисления пружин, используемых в образце/цах ручки/чек управления и образца/цов педалей, для принятия допустимого предельного размера диаметр D пружин быть постоянной величины [6].
При управлении ручкой/ами управления и педалей выбираются цилиндрические винтовые пружины с небольшим шагом, которые будут работать на натяжение.
Из полученных результатов для органов управления (ручка/и управление и педали) выбирается жесткость и оформляются размеры каждой пружины. Принятый по конструктивным соображениям диаметр первоначально берется в увеличивающемся масштабе, как постоянная величина для всех пружин, приложеные к ручке/ам управления и педалям, а затем делается выбор в масштабе М1:1, причем диаметр снова сохраняется постоянная величина для всех пружин, приложенных к ручке/ам управления и педалям.
1.6) оформляется комбинирование размеров на трех технологических объектах и создается тренажер:
1.6.1) на макет тренажера в уменьшенном масштабе;
1.6.2) на летательном аппарате военной авиации;
1.6.3) на компьютерном оборудовании (мониторе).
Для выполнения следующих действий этапов и получения размеров тренажера обеспечиваются размеры панели в кабине и расстояние с глаз пилотов до фанара.
2) Промежуточный этап, включающий:
2.1) после обеспечения необходимых размеров переходият к:
2.1.1) разделению панелей на определеное количество мониторов;
2.1.2) вычисляются по формулам: коэффициент - Rn; суммарные коэффициенты - Rzy, Rxy, Rxz; коэффициент, определяющий размеры мониторов (выбора мониторов) - Rобощо; коэффициенты уменьшения размеров тренажера в равнинах zy, ху, xz Rczy, Rcxy, Rcxz:
Rn=MM / TC
MM - размеры макета мониторов,
TC - размеры панелей летательного аппарата военной авиации,

Rnx, Rny, Rnz - коэффициенты, эквивалентные Rn, по отношению к осям x, у, z,
n - количество мониторов, по отношению к их
расположению:
1 - основной/ые монитор/ы
2 - горизонтальные мониторы
3 - вертикальные мониторы
4 - монитор/ы, рассположен/ны выше вертикальных мониторах и основном/ых мониторе/ах,
Rобщо=(Rzy+Rxy+Rxz) / 3
Rzy, Rxy, Rxz - суммарные коэффициенты в равнинах Ozy, Оху, Oxz.
Rczy=Rzy / 2; Rcxy=Rxy / 2; Rcxz=Rxz / 2
Rzy, Rxy, Rxz - суммарные коэффициенты в равнинах Ozy, Оху, Oxz.
Полученные значения для Rn; Rzy, Rxy, Rxz; Rобщо; Rczy, Rcxy, Rcxz используются для выполнения чертежей тренажера в 2D и 3D пространствах, переброска проекта в пространстве, определения предельных размеров, определения размеров и количества мониторов и его виртуальной сборки. Результаты формул вводятся в таблицу для каждой равнины Ozy, Оху, Oxz.
2.1.3) делается выбор мониторов. Желательно использовать 3D LCD touch screen display, исключительно тонкие мониторы. Можно взять либо только 2D, либо только 3D. Из-за ограниченного количества 3D мониторов, могут быть выбраны такие, которые конвертируются.
Результаты для панелей вносятся в таблицу, где записывается вид панели, виды мониторов, номер монитора, ширина, высота, диагональ и основа.
При выборе мониторов взять во внимание расстояние от глаз пилота до фанара.
2.2) после выбора мониторов делаются аксонометрические чертежи в трех экземплярах, по отношению к трем координатным равнинам Ozy, Оху, Oxz. На них наноситься размеры тренажера в увеличивающемся масштабе и предельные размеры (размеры от т.1.2)), разделенные с коэффициентами Rczy, Rcxy, Rcxz в равнинах с увеличивающимся масштабом.
2.3) из полученных по конструктивному способу размерных пределов выбираются действительные размеры. Действительные размеры выбирутся из предельных размеров в допустимых пределов. Могут быть уменьшены ниже предельных, только сообразно конструкции и кабины. Делаются пространственные чертежи по данному типу изометрии, а именно NE Isometric для составных частей. Затем весь тренажер собирается виртуально на программном обеспечении.
2.4) так полученный тренажер определяется как приемлемый сообразно его действительным размерам в 3D пространстве и делаются чертежи реального тренажера на 2D, за исключением чертежей пружин.
3) Конечный этап, включающий:
3.1) выполняются вычисления пружин для 3D плоскости при следующих входных данных:
Pmin - минимальная нагрузка, приложенная к ручке/ам управления и педалям;
Pmax - максимальная нагрузка, приложенная к ручке/ам управления и педалям;
x - координаты отклонения органов управления;
G - модул угловой деформации при пружинной стали Ст70;
τдоп. _ допустимое касательное напряжение;
R (D) - уменьшенный радиус (диаметр) пружины тренажера для летательного аппарата в М1:1. R (D) постоянная величина для всех пружин, примененных к тренажерам для летательных аппаратов военной авиаций в этапе 3) в масштабе М1:1.
3.1.1) вычисляется максимальный крутящий момент Мус;
3.1.2) вычисляется максимальное растяжение пружин max f;
3.1.3) выполняется проверка максимального касательного напрежения maxτx при установленном сечении чистого скручивания max τx≤τдоп.;
3.1.3.1) вычисляется диаметр поперечного сечения d;
3.1.3.2) вычисляется количество действующих обмоток i;
3.1.3.3) записывается результат количества действующих обмоток i;
3.1.3.4) выбираются пружины.
3.1.4) вычисляется минимальное световое отверстие δmin;
3.1.5) вычисляется начальное световое отверстие δ0;
3.1.6) вычисляется начальная (свободная) длина L0;
3.1.7) вычисляется длина после нагрузки max P L2;
3.1.8) вычисляется длина после нагрузки min P L1;
3.1.9) вычисляются длины пружин при растяжения f1 и f2;
3.1.10) вычисляется угол наклона винтовой линии α:
3.1.10.1) вычисляется шаг пружины h и записываются размеры d, D, δ0, L0 и i пружин.
3.1.11) вычисляется длина винтовой линии l;
3.1.12) вычисляется пружинная константа с;
3.1.13) сообразно расстояниям, которые получаются при оформлении размеров образцов ручку/и управления и педали, выбирается количество обмоток i;
3.1.14) выполняется повторение на т.3.1.1), т.3.1.2), т.3.1.3) и т.3.1.3.1);
3.1.15) при выбранных значениях количества действующих обмоток i вычисляется снова максимальное растяжение пружины max f.
При переброске пружины из 3D в 2D пространствах возникают изменения, которые отражаются на изображениях от рабочих чертежах.
Для этой цели используется координатная система Oxyz, как для каждой равнины определяется коэффициент kzy, kxy, kxz. Коэффициенты kzv, kxy, kxz эквивалентны с (k). Для каждого максимального растяжения пружин max f, по отношению к длины после нагрузки minP L1 и количества обмоток i берется необходимый коэффициент от пространства для всех равнин Ozy, Оху, Oxz, сообразно с коэффициентами Rczy, Rcxy, Rcxz от т.2.1) и записывается в координатной системе Oxyz.
Затем вычисляются пружины как взятия допустимое значения коэффициента пружин в пространстве (k), умноженного на коэффициент при максимальном растяжении пружин. Т.е. (k) * max f.
3.1.16) от максимального растяжения пружин max f находится значение коэффициента для пружин в пространстве:
3.1.16.1) предшествующие максимальные растяжения max f разделить на коэффициенты для уменьшения размеров тренажера в равнине zy, xy, xz, т.е. на Rczy, Rcxy, Rcxz;
3.1.16.2) от Т.3.1.15) берутся новополученные максимальные растяжения пружин max f;
3.1.16.3) новополученные максимальные растяжения max f умножаются на коэффициенты уменьшения размеров тренажера в равнине zy, ху, xz, т.е. на Rczy, Rcxy, Rcxz:
3.1.16.4) получаются коэффициенты пружин в пространстве (k) для каждой равнины Ozy, Оху, Oxz.
Расположение пружин определяется в какой равнине выполняется действие и какой коэффициент будет использован. Делаются следующие дополнительные вычисления, которые определяют работу органов управления (ручки/чек управления и педалей), т.е. работы пружин.
3.1.17) выбираются пружины;
3.1.18) значения минимального светового отверстия δmin берутся от т.3.1.4);
3.1.19) выполняются дополнительные вычисления начального светового отверстия δ0;
3.1.20) выполняются дополнительные вычисления начальной (свободной) длины L0;
3.1.21) выполняются дополнительные вычисления длины после нагрузки max P L2 по формуле:
L2=L0+max f+(k) * max f
3.1.22) выполняются дополнительные вычисления длины после нагрузки min Р L1;
3.1.23) выполняются дополнительные вычисления длины пружин при растяжении f1 и f2;
3.1.23.1) для f1; 3.1.23.2) для f2.
3.1.24) выполняются дополнительные вычисления угла наклона винтовой линии α:
3.1.24.1) выполняются дополнительные вычисления шага пружин h:
Описываются размеры пружин, как: d, D, δ0, L0, i.
3.1.25) выполняются дополнительные вычисления длины винтовой линии 1;
3.1.26) выполняются дополнительные вычисления пружинной константы с по формуле:
с=max Р / (max f+(k) * max f)
3.2) выполняется сравнение вычисленных размеров от т.3.1) пружин с предельными возможными, соответствующими размерами, которые определяются из действительных размеров образца/цов ручки/чек управления и образца/цов педалей, как если полученные при вычислении размеры не соответствуют, возвращаемся в т.3.1), а если полученные при вычислении размеры соответствуют, следовательно полученные результаты для размеров пружин ставятся как окончательные в чертежах образца/цов ручки/чек управления и образца/цов педалей и выполняются остальные чертежи, невыполненные в т.2.4).
Пример №2:
Согласно изобретения, разработан метод, касающийся космических аппаратов. Метод состоит в следующем:
1) Начальный этап:
Для космических аппаратов используется последовательность метода, согласно примеру №1. Первые два действия выполняются для космических аппаратов при соответствующих заданных входных данных, а также дополнительных (необходимых в процессе вычисления) данных, учитывая использованные физические зависимости, которые находят применение при управлении органов управления.
1.3) В действие 1.3) берут во внимание количество образцов ручке - управления и количество образцов педалей.
1.4) После выполнения вычислительного процесса изготовляется реальный или виртуальный макет. Макет для космических аппаратов, сходен с этим аппаратом с двухместным расположением в кабине. Расстояние площади расположения сиденья удваивается, сообразно расположения горизонтальных панелей (с наличными приборами) и подставка для ручки управления двигателем/ями при космических челноках, а для космических кораблей лишь утраивается и т.д., в зависимости от количества космонавтов. Макет приобретает изменение только по отношению его ширины. Все остальные размеры сохраняются с целью выполнения требований по JAR (Joint Aviation Requirements - Общие Требования Авиации). Макет тренажера изготовливается в уменьшенном масштабе. Чтобы достигнуть допустимых предельных размеров тренажеров для космических аппаратов используется увеличивающий масштаб, а выполненный после совершения следующих действий тренажер, получается в масштабе М1:1, сообразно кабины.
При вычислениях сохраняются отклонения и усилия органов управления, оформляя только размеры тренажера (ручки управления, педали, столешница, сиденья, ось, тяжесть, тест-тестирующее устройство, подставка ручки управления двигателей и пружины) в увеличивающимся масштабе. Стандартные размеры (некоторые размеры педалей, ручек управления, сидений, ручки управления двигателями, расстояния некоторые для них и др.), измеренные из кабины сохраняются.
1.5) В действие 1.5) берут во внимание количество образцов на ручку управления и образцов педалей, соответственно и пружин. При использовании аналогичных образцов для ручки управления и для педалей прикладываются для каждого аналогичного образца (для ручки управления и для педалей), вычисленному аналогичным способом пружин.
1.6) Действие 1.6) выполняется по методу, согласно примеру №1 для космических аппаратов.
2) Промежуточный этап, включающий:
В промежуточном этапе берут во внимание количество мониторов, которое различно.
3) Конечный этап, включающий:
В конечном этапе, сообразно количества образцов определяется и количества пружин. При использовании аналогичных образцов для ручки управления и для педалей прикладываются для каждого аналогичного образца (для ручки управления и для педалей), вычисленному по аналогичным способом пружин.
Пример №3:
Согласно изобретения, разработан метод, касающийся летательных аппаратов гражданской авиации. Метод состоит в следующем:
1) Начальный этап:
Для летательных аппаратов гражданской авиации используется последовательность метода, согласно примеру №1. Первые два действия выполняются для летательных аппаратов гражданской авиации при соответствующих заданных входных данных, а также дополнительных (необходимых в процессе вычисления) данных, учитывая использованные физические зависимости, которые находят применение при управлении органов управления.
1.3) В действие 1.3) берут во внимание количество образцов ручке управления и количество образцов педалей.
1.4) После выполнения вычислительного процесса изготовляется реальный или виртуальный макет. Макет летательных аппаратов гражданской авиации является макетом аппаратов с двухместным расположением в кабине. Расстояние площади для расположения сиденья удваивается и оставляется растояние между ними, сообразно расположения горизонтальных панелей (с наличными приборами) и подставка ручки управления двигателями. Макет приобретает изменение только по отношению его ширины. Все остальные размеры сохраняются с целью выполнения требований по JAR (Joint Aviation Requirements - Общие Требования Авиации). Макет тренажера изготовливается в уменьшенном масштабе. Чтобы достигнуть допустимых предельных размеров тренажеров для летательных аппаратов гражданской авиации используется увеличивающий масштаб, а выполненный после совершения следующих действий тренажер, получается в масштабе М1:1, сообразно кабины.
При вычислениях сохраняются отклонения и усилия органов управления, оформляя только размеры тренажера (ручки управления, педали, столешница, сиденья, ось, тяжесть, тест-тестирующее устройство, подставка ручки управления двигателей и пружины) в увеличивающимся масштабе. Стандартные размеры (некоторые размеры педалей, ручек управления, сидений, ручки управления двигателями, расстояния некоторые для них и др.), измеренные из кабины сохраняются.
1.5) В действие 1.5) берут во внимание количество образцов на ручку управления и образцов педалей, соответственно и пружин. При использовании двух аналогичных образцов для ручки управления и двух для педалей прикладываются для каждого аналогичного образца (для ручки управления и для педалей), вычисленному аналогичным способом пружин.
1.6) Действие 1.6) выполняется по методу, согласно примеру №1 для летательных аппаратов гражданской авиации.
2) Промежуточный этап, включающий:
В промежуточном этапе берут во внимание количество мониторов, которое различно.
3) Конечный этап, включающий:
В конечном этапе, сообразно количества образцов определяется и количества пружин. При использовании двух аналогичных образцов для ручки управления и двух для педалей прикладываются для каждого аналогичного образца (для ручки управления и для педалей), вычисленному аналогичным способом пружин.
Пример №4:
Согласно изобретения, разработан метод, касающийся вертолетов. Метод состоит в следующем:
1) Начальный этап:
Для вертолетов используется последовательность метода, согласно примеру №1. Первые два действия выполняются для вертолетов при соответствующих заданных входных данных, а также дополнительных (необходимых в процессе вычисления) данных, учитывая использованные физические зависимости, которые находят применение при управлении органов управления.
1.3) В действие 1.3) берут во внимание количество образцов ручке управления и количество образцов педалей.
1.4) После выполнения вычислительного процесса изготовляется реальный или виртуальный макет. Макет вертолетов с одноместным расположением в кабине сходен с этим на фиг. 1 и фиг. 2. При двухместном расположении в кабине, расстояние площади для расположения сиденья удваивается. В зависимости от вида вертолета (с одно- и двухместным расположением в кабине), макет может приобрести изменение только по отношению его ширины. Все остальные размеры сохраняются с целью выполнения требований по JAR (Joint Aviation Requirements - Общие Требования Авиации). Макет тренажера изготовливается в уменьшенном масштабе. Чтобы достигнуть допустимых предельных размеров тренажеров для вертолетов используется увеличивающий масштаб, а выполненный после совершения следующих действий тренажер, получается в масштабе М1:1, сообразно кабины.
При вычислениях сохраняются отклонения и усилия органов управления, оформляя только размеры тренажера (ручка/и управления, педали, столешница, сиденье/я, ось, тяжесть, тест-тестирующее устройство, подставка ручки управления двигателя/ей и пружины) в увеличивающимся масштабе. Стандартные размеры (некоторые размеры педалей, ручки/чек управления, сиденья/ий, ручки управления двигателем/ями, расстояния некоторые для них и др.), измеренные из кабины сохраняются.
1.5) В действие 1.5) берут во внимание количество образцов на ручку управления и образцов педалей, соответственно и пружин. При использовании аналогичных образцов для ручки управления и для педалей прикладываются для каждого аналогичного образца (для ручки управления и для педалей), вычисленному аналогичным способом пружин.
1.6) Действие 1.6) выполняется по методу, согласно примеру №1 для вертолетов.
2) Промежуточный этап, включающий:
В промежуточном этапе берут во внимание количество мониторов, которое различно.
3) Конечный этап, включающий:
В конечном этапе, сообразно количества образцов определяется и количества пружин. При использовании аналогичных образцов для ручки управления и для педалей прикладываются для каждого аналогичного образца (для ручки управления и для педалей), вычисленному аналогичным способом пружин.
Пример №5:
Согласно изобретения, разработан метод, касающийся летательных аппаратов легкой авиации. Метод состоит в следующем:
1) Начальный этап:
Для летательных аппаратов легкой авиации используется последовательность метода, согласно примеру №1. Первые два действия выполняются для летательных аппаратов легкой авиации при соответствующих заданных входных данных, а также дополнительных (необходимых в процессе вычисления) данных, учитывая использованные физические зависимости, которые находят применение при управлении органов управления.
1.3) В действие 1.3) берут во внимание количество образцов ручке управления и количество образцов педалей.
1.4) После выполнения вычислительного процесса изготовляется реальный или виртуальный макет. Макет летательных аппаратов леткой авиации с одноместным расположением в кабине сходен с этим на фиг. 1 и фиг. 2. При двухместном расположении в кабине, расстояние площади для расположения сиденья удваивается. В зависимости от вида летательного аппарата (с одно- или двухместным расположением в кабине), макет может приобрести изменение только по отношению его ширины. Все остальные размеры сохраняются с целью выполнения требований по JAR (Joint Aviation Requirements - Общие Требования Авиации). Макет тренажера изготавливается в уменьшенном масштабе. Чтобы достигнуть допустимых предельных размеров тренажеров для летательных аппаратов легкой авиации используется увеличивающий масштаб, а выполненный после совершения следующих действий тренажер, получается в масштабе М1:1, сообразно кабины.
При вычислениях сохраняются отклонения и усилия органов управления, оформляя только размеры тренажера (ручка/и управления.
педали, столешница, сиденье/я, ось, тяжесть, тест-тестирующее устройство, подставка ручки управления двигателя/ей и пружины) в увеличивающимся масштабе. Стандартные размеры (некоторые размеры педалей, ручки/чек управления, сиденья/ий, ручки управления двигателем/ями, расстояния некоторые для них и др.), измеренные из кабины сохраняются.
1.5) В действие 1.5) берут во внимание количество образцов на ручку управления и образцов педалей, соответственно и пружин. При использовании аналогичных образцов для ручки управления и для педалей прикладываются для каждого аналогичного образца (для ручки управления и для педалей), вычисленному аналогичным способом пружин.
1.6) Действие 1.6) выполняется по методу, согласно примеру №1 для летательных аппаратов легких авиации.
2) Промежуточный этап, включающий:
В промежуточном этапе берут во внимание количество мониторов, которое различно.
3) Конечный этап, включающий:
В конечном этапе, сообразно количества образцов определяется и количества пружин. При использовании аналогичных образцов для ручки управления и для педалей прикладываются для каждого аналогичного образца (для ручки управления и для педалей), вычисленному аналогичным способом пружин.
Варианты для выполнения тренажера по методу пространственого проектирования тренажеров для летательных и космических аппаратов объясняются с помощью следующих примеров выполнения:
Пример №6:
При тренажеров для космических аппаратов (фиг. 10) изменение возникает при оформлении столешницы (1) - проектируется шире, из-за использования двухместного или трехместного и т.д. расположения. Расположение подставки для ручки управления двигателей (8) зависит от типа аппарата. Ручка управления (3) тоже ставится сообразно расположению. Образец тот же. Используется соединение аналогичных образцов ручки управления (3.m, m=1…n). Размеры (D) пружин (29.1.i, i=1, 2) сохраняются как постоянная величина. Изменения в образце педалей (2) нет, как и в размерах (D) пружин (29.2.j, j=1, 2). Изменяется их количество (используются аналогичные образцы, которые не связаны между собой, как ручка управления (3) т.к. усложняется вычислительная работа) и размеры, сообразно вычислениям. Связывание образцов с управляющим/ими блоком/ами дает возможность образцам, как ручки управления (3.m, m=1…n), так и педалям (2.m, m=1…n) выполнять совместные движения, например один образец ручки управления (3.1) при отклонении в данном направлении отклоняется и другая ручка управления (3.2) в том же направлении и т.д. Изменяются количество и размеры мониторов (21.m, m=1…n) в зависимости от вычислений. Тест-тестирующее устройство (9) не изменяется в конструкции. Единственное изменение - в количестве записывающих устройств. Изменение в конструкции сиденья (4) возникает при использовании связывающей конструкции аналогичных сидений (4.m, m=1…n), как между ними, в зависимости от вида космического аппарата ставится монитор (с наличными приборами) и в зависимости от расположения ручки управления двигателями проектируется подставка для нее или утраивается и т.д., сообразно количеству космонавтов. При механизме (30.0) на фиг. 7 и гайки (30), стопорные конструкции на аналогичных сидениях (4.m, m=1…n), возникают изменения в размерах, сообразно оси (5). Ось (5) проходит снова через столешницу (1). Связь ручек управления (3.m, m=1…n) и связь сидений (4.m, m=1…n) придерживается опорой (тяжестью) (6). Для опоры (тяжести) (6) при возникающих изменениях в размерах, изменяется ее вес. Это согласуется с полученным тренажером при выполнение вычислений. Визуальный обзор панелей и окружающего пространства согласуется с видом аппарата и реализованы согласно известных в технике способов.
При использовании системы привода (22.1 и 22.2) (фиг. 12) схема от фиг. 10, (применимая для космических челноков) строится как закрытая система мониторов (21.m, m=1…n) и закрепляется неподвижно к круговой поверхности (25) и к самой системе привода (22.1 и 22.2). Система привода (22.1 и 22.2) представляет два вращающихся кольца (22.1 и 22.2). расположенных перпендикулярно друг к другу, крепящихся на стойках (23.1 и 23.2) на полу помещения. Для ее остановки используется единичный автоматический ключ (27). Сидения (4.m, m=1…n) проектируются целостно вниз. Они оснащены ремнями (28.m, m=1…n) для удерживания космонавтов. После перемещения сидений (4.m, m=1…n) в кабину ставится держатель (26), которой их поддерживает к круговой поверхности (25). Круговая поверхность (25) прикрепляется к вращающимся кольцам (22.1 и 22.2) к системе привода. Под круговой поверхности (25) поставлено устройство для создания перегрузки (24), которое связано с управляющим/ими блоком/ами (7.m, m=1…n).
Конструкция на фиг. 12 применима и для космических аппаратов (космических кораблей) с увеличением ширины столешницы для установки дополнительного сиденья и расчитанных мониторов.
Пример №7:
Для тренажеров летательных аппаратов гражданской авиации применяется конструкция, аналогичная та для космических аппаратов с двухместным расположением в кабине (фиг. 10), с единственой разницей в размерах. Только размеры (D) пружин (29.1.i, i=1, 2 и 29.2.j, j=1, 2) сохраняют постоянную величину. Визуальный обзор панелей и окружающего пространства согласуется с видом аппарата и реализованы согласно некоторые известные в технике способов. Тренажер не крепится к системе привода (22.1 и 22.2), к которой прикрепляется устройство для создания перегрузки (24).
Пример №8:
Для тренажеров вертолетов применяется конструкция как для вертолетов с одноместным расположением в кабине (используется конструкция авиационного тренажера, спроектированная согласно методу) (фиг. 3, фиг. 9), так и с двухместным (аналогичная та космических аппаратов, но без установки горизонтальных мониторов (21.m, m=1…n) между сидениями (4.m, m=1…n)) (фиг. 12), с единственой разницей в размерах. Только размеры (D) пружин (29.1.i, i=1, 2 и 29.2.j, j=1, 2) сохраняют постоянную величину. Визуальный обзор панелей и окружающего пространства согласуется с видом аппарата и реализованы согласно некоторые известные в технике способов. В зависимости от предназначения вертолета тренажер можно прикрепить и к системе привода (22.1 и 22.2), к которой прикрепляется устройство для создания перегрузки (24) (фиг. 11, фиг. 12).
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИФИЦИРОВАННЫЙ ПРОЦЕДУРНЫЙ ТРЕНАЖЕР ЛЕТНОГО И ТЕХНИЧЕСКОГО ПЕРСОНАЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2279141C1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| Тренажер для подготовки пилота | 2015 |
|
RU2610318C1 |
| ТРЕНАЖЕР СПАСАТЕЛЬНОГО ВЕРТОЛЕТА | 2017 |
|
RU2662302C1 |
| КРЕСЛО ПИЛОТАЖНОГО ТРЕНАЖЁРА С ИМИТАТОРАМИ ВИБРАЦИЙ И УДАРОВ | 2014 |
|
RU2555053C1 |
| ТРЕНАЖЕР ПОКИДАНИЯ ТОНУЩЕГО ВЕРТОЛЕТА | 2017 |
|
RU2655570C1 |
| АВТОБУСНЫЙ ТРЕНАЖЕР | 2011 |
|
RU2467400C1 |
| ИМИТАТОР ВИЗУАЛЬНОЙ ОБСТАНОВКИ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2230370C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
Изобретение относится к методу пространственного проектирования тренажеров летательных и космических аппаратов, предназначенных для обучения летчиков-пилотов и космонавтов, и авиационному тренажеру по этому методу. Метод пространственного проектирования тренажеров состоит из трех этапов, структурированных в последовательности действий. На начальном этапе выполняются вычисления отклонений и усилий, передающихся образцам ручек управления и педалей, с учетом физических зависимостей. Затем изготавливается макет тренажера с размерами в соответствии с требованиями JAR и типом аппарата. На промежуточном этапе определяются основные размеры мониторов и тренажера в целом. Затем происходит подготовка 2D и 3D чертежей, за исключением чертежей пружин, используемых в ручках управления и педалях. На конечном этапе выполняются вычисления для определения размеров пружин, в зависимости от их расположения. Авиационный тренажер, выполненный по методу пространственного проектирования, состоит из управляющего блока с расположенными на столешнице мониторами. Столешница прикреплена к полу опорами. Педали, регулирующиеся подъемниками (регуляторами), закреплены к столешнице, зафиксированные планкой, которая поставлена в изделие X. Визуальный обзор соответствует виду аппарата. Изделие Х представляет собой усеченный конструктивный элемент для крепления планки. Техническим результатом является упрощение конструирования тренажеров. 2 н. и 6 з.п. ф-лы, 6 ил.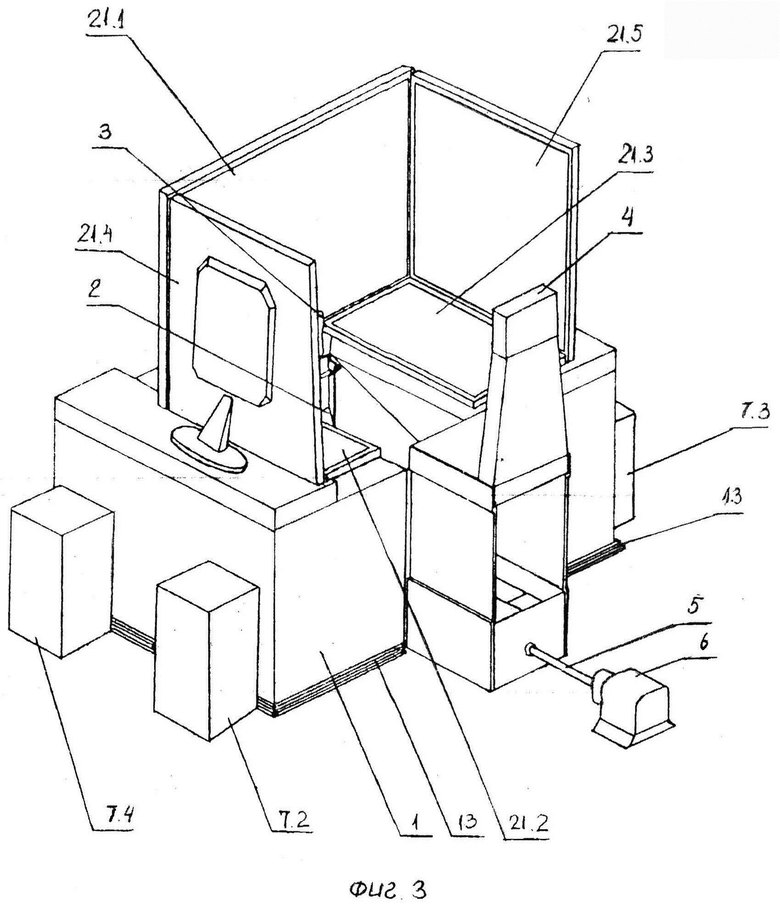
1. Метод пространственного проектирования тренажеров для летательных и космических аппаратов, состоящий из следующих этапов:
I) начальный этап, при котором выполняются следующие действия:
1) вычисление полуавтоматизированного или автоматизированного при помощи компьютера и специализированного программного обеспечения отклонений и усилий, передающихся образцу/цам ручки/чек управления и построение балансировочных диаграмм по отклонениям и усилиям, с использованием известных физических зависимостей для соответствующего аппарата при заданных входных данных, а также дополнительных, необходимых в процессе вычисления, данных, имея в виду использованные физические зависимости, которые находят применение при управлении органов управления;
2) вычисление полуавтоматизированного или автоматизированного при помощи компьютера и специализированного программного обеспечения отклонений и усилий, передающихся образцу/цам педалей, и построение балансировочных диаграмм по отклонениям и усилиям, с использованием известных физических зависимостей для соответствующего аппарата при заданных входных данных, а также дополнительных, необходимых в процессе вычисления, данных, имея в виду использованные физические зависимости, которые находят применение при управлении органов управления;
3) сопоставление результатов 1) и 2);
4) изготовление макета тренажера с размерами в соответствии с требованиями JAR, соответствующими типу аппарата, для которого предназначен тренажер, в подходящем уменьшенном масштабе, воссоздающий кабину типа аппарата, подбор масштаба и определение размеров, размещение,тренажера в увеличивающем масштабе, сохраняющем стандартные размеры, измеренные в кабине летательного или космического аппарата;
5) выполнение вычисления для пружин, работающих на натяжение, использование в образце/цах ручки/чек управления и образце/цах педалей в увеличивающем масштабе, с принятием допустимого предельного размера диаметра D пружин постоянной величины;
6) комбинирование размеров полученного макета, реального аппарата и мониторов, трех технологических объектов, и оформление идейного проекта тренажера;
II) промежуточный этап, при котором выполняются следующие действия:
7) определение размеров мониторов и оформление действительных их размеров, полученных с помощью формул:
Rn = ММ / ТС,
где Rn - коэффициент,
ММ - размеры макета мониторов,
ТС - размеры панелей летательного или космического аппарата,
Rzy = Rnz + Rny,
Rxy = Rnx + Rny при n=1, 2, 3, 4,
Rxz = Rnx + Rnz,
где Rzy, Rxy, Rxz - суммарные коэффициенты в равнинах Ozy, Оху, Oxz,
Rnx, Rny, Rnz - коэффициенты, эквивалентные Rn, по отношению к осям x, y, z,
n - количество мониторов по отношению к их расположению:
1 - основной/ые монитор/ы,
2 - горизонтальные мониторы,
3 - вертикальные мониторы,
4 - монитор/ы, расположенный/ные выше вертикальных мониторов и основного/ых монитора/ов,
Rобщ = (Rzy + Rxy + Rxz)/3,
где Rобщ – коэффициент, определяющий размеры мониторов, выбранных мониторов,
Rzy, Rxy, Rxz - суммарные коэффициенты в равнинах Ozy, Оху, Oxz,
Rczy = Rzy/2; Rcxy = Rxy/2; Rcxz = Rxz/2,
где Rczy, Rcxy, Rcxz - коэффициенты уменьшения размеров тренажера в равнинах zy, ху, xz,
Rzy, Rxy, Rxz - суммарные коэффициенты в равнинах Ozy, Оху, Oxz, значения Rn; Rzy, Rxy, Rxz; Rобщ; Rczy, Rcxy, Rcxz используются для выполнения чертежей тренажера в 2D и 3D пространствах, переброска проекта в пространстве, определение предельных размеров тренажера, определение размеров и количества мониторов, выбранных мониторов, и виртуальной его сборки;
8) подготовка 3D чертежей в трех экземплярах и нанесение размеров в трех координатных равнинах;
9) выбор действительных размеров, работа с программным, чертежным, продуктом для получения каждой отдельной части и виртуальная сборка всей конструкции тренажера;
10) вычерчивание реального тренажера на 2D рабочих чертежей, за исключением чертежа пружин;
III) конечный этап, при котором выполняются следующие действия:
11) в зависимости от расположения пружин, работающих на натяжение, в 3D пространстве выполняются вычисления для определения их действительных размеров, а именно:
- вычисление максимального крутящего момента,
- вычисление максимального растяжения пружин,
- выполнение проверки максимального касательного напряжения при установленном сечении чистого кручения,
- вычисление диаметра поперечного сечения,
- вычисление количества действующих обмоток,
- записывание результата количества действующих обмоток,
- выбор пружин,
- вычисление минимального светового отверстия,
- вычисление начального светового отверстия,
- вычисление начальной, свободной, длины,
- вычисление длины после максимальной и минимальной нагрузки,
- вычисление длин пружин при растяжении,
- вычисление угла наклона винтовой линии,
- вычисление шага пружин и записывание размеров пружин,
- вычисление длины винтовой линии,
- вычисление пружинной константы,
- выполнение подбора числа обмоток, сообразно расстояниям, получающимся при оформлении размеров образца/цов ручки/чек управления и образца/цов педалей, выполнение снова вычисления максимального крутящего момента, максимального растяжения пружин, проверка максимального тангенциального напряжения при установленном сечении чистого кручения, вычисление диаметра поперечного сечения,
- вычисление снова максимального растяжения пружин при выбранных значениях количества действующих обмоток,
- определение коэффициентов kxy, kxz и kzy пружин сообразно их расположению в равнинах и выполнение дополнительных вычислений пружин, а именно:
- выбор пружин и принятие значений минимального светового отверстия и предыдущих вычислений,
- выполнение дополнительных вычислений начального светового отверстия,
- выполнение дополнительных вычислений начальной, свободной, длины,
- выполнение дополнительных вычислений длины после максимальной нагрузки по формуле:
L2 = L0 + max f + (k) * max f,
- выполнение дополнительных вычислений длины после минимальной нагрузки,
- выполнение дополнительных вычислений длины пружин при растяжении,
- выполнение дополнительных вычислений угла наклона винтовой линии,
- выполнение дополнительных вычислений шага пружин,
- описание размеров пружин,
- выполнение дополнительных вычислений длины винтовой линии,
- выполнение дополнительных вычислений пружинной константы по формуле:
с = max Р / (max f + (k) * max f),
при сохранении постоянной величины диаметра D пружин;
12) выполнение сравнения вычисленных размеров от 11) пружин с предельными возможными, соответствующими размерами, которые определяются от действительных размеров образца/цов ручки/чек управления и образца/цов педалей, если полученные при вычислении размеры не соответствуют, возвращаемся в 11), а если полученные при вычислении размеры соответствуют, следовательно, полученные результаты для размеров пружин ставятся как окончательные в чертежах образца/цов ручки/чек управления и образца/цов педалей и выполняются остальные чертежи, не выполненные в 10).
2. Метод по п. 1, отличающийся тем, что в 1) усилия, приложенные на образце/цах ручки/чек управления, вычисляются по отношению к скорости, а в 2) выполняются вычисления отклонений и усилий, передающихся на ручку/и управления.
3. Метод по п. 1 или 2, отличающийся тем, что вычисления в 7) вводятся по крайней мере в одну таблицу.
4. Метод по п. 1, отличающийся тем, что конечный этап может выполняться раньше 10) из промежуточного этапа в случаях, когда оформлены все остальные размеры.
5. Метод по п. 4, отличающийся тем, что когда конечный этап выполняется раньше 10) из промежуточного этапа в случаях, когда оформлены все остальные размеры, также может быть сделано:
- вычисление в 1) усилий, приложенных на образце/цах ручки/ек управления по отношению к скорости;
- выполнение вычислений отклонений и усилий, передающихся на ручку/ки управления в 2);
- введение вычислений в 7) по крайней мере в одну таблицу.
6. Авиационный тренажер, выполненный по методу пространственного проектирования по п.п. 1-5, состоящий, по крайней мере, из одного управляющего блока (7.m, m=1…n), столешницы (1), на которой поставлены мониторы (21.m, m=1…n) и которая придерживается опорами (13) внутри и снаружи, как опоры (13) прикреплены к ней и полу неподвижно, за исключением боковых частей столешницы (1), где проходит сиденье (4), опоры (13) располагаются только внутри, педали (2) регулирующиеся подъемником/регулятором (14), крепящийся в профиле (12) на столешнице (1), на которой смонтировано изделие X (11), которое представляет собой усеченный конструктивный элемент для крепления планки, в которое поставлена планка (10), стопорящая подъемник/регулятор (14) с педалями (2), ручка управления самолетом (3), через которую проходит ось (5), фиксирующая посредством ступни ручки управления (3) со стороны педалей (2) и которая прикреплена неподвижно к полу помещения, сиденье (4), перемещающееся по оси (5), и стопорящееся механизмом (30.0) или гайкой (30), опора/тяжесть (6), уравновешивающая конструкцию, подставка для ручки управления двигателем (8), как ручка управления самолетом (3) оснащенная пружинами (29.1.i, i=1, 2), педали (2), оснащенные с пружинами (29.2.j, j=1, 2) и ручка управления двигателем представляет джойстики, которые связанны с управляющим/ими блоком/ами (7.m, m=1…n), как для ручки управления самолетом (3) взят соответствующий джойстик и связан с образцом, для ручки управления двигателем - джойстик поставлен на подставке (8), педали (2) с подъемником/регулятором (14) связываются с управляющим/ими блоком/ами (7.m, m=1…n), громкоговорители, тестирующее устройство (9), сравнивающее данные двух полетов, отличающийся тем, что образец ручки управления и образец педалей оснащены пружинами (29.1.i, i=1, 2 и 29.2.j, j=1, 2).
7. Авиационный тренажер по п. 6, отличающийся тем, что пружины (29.1.i, i=1, 2 и 29.2.j, j=1, 2), приложенные к образцу ручки управления и образцу педалей, с одинаковым диаметром D.
8. Авиационный тренажер по п.п. 6 или 7, отличающийся тем, что сиденье (4), оснащенное ремнями (28) и держателем (26) для круговой поверхности (25), на которой посредством опоры (13) крепится столешница (1), к которой крепится закрытая система мониторов (21.m, m=1…n), система привода, состоящая из двух вращающихся колец (22.1 и 22.2), расположенных перпендикулярно друг к другу, прикрепленных на стойках (23.1 и 23.2) к полу помещения, единичный автоматический ключ (27), использующийся для остановки системы привода (22.1 и 22.2), устройство для создания перегрузки (24), которое связано с управляющим/ими блоком/ами (7.m, m=1…n) и поставленное под круговой поверхностью (25), на которой крепится тренажер.
| Красовский А.А | |||
| "Основы теории авиационных тренажеров" | |||
| - М.: Машиностроение, 1995, стр.131-160, 231-244 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЕСКД | |||
| Технический проект" | |||
| - введ | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 7236914 B1, 26.06.2007 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ БРИКЕТОВ, СТРОИТЕЛЬНЫХ ПЛИТ И ТОМУ ПОДОБНЫХ ИЗДЕЛИЙ ИЗ РАСТИТЕЛЬНЫХ ВОЛОКОН И ДРЕВЕСИНЫ | 1930 |
|
SU38070A1 |

