Заявленное изобретение относится к области массовых развлечений и тренировочным аппаратам и может быть использовано в разных модификациях в сфере отдыха и развлечений, а также для профессиональной подготовки водителей автомобилей, пилотов спортивных болидов и пр.
Аналогом заявленного технического решения является аттракцион-тренажер, содержащий установленное на неподвижной платформе 1 вертикальное основание 2, на котором смонтирован с возможностью совершать движение по крену и тангажу макет летательного аппарата 3, снабженный органами управления и движителем 4, согласно заявляемому техническому решению движитель макета летательного аппарата 4 установлен в центре тяжести макета, жестко связан с штангой 5 многоугольной металлической рамой 6 - каркасом макета летательного аппарата, а выходной вал 7 движителя 4 жестко связан с промежуточной рамой 8, установленной с возможностью вращения относительно платформы 1 вокруг горизонтальной оси и соединенной с одной стороны шарнирно с вертикальным основанием 2, а с другой стороны - жестко связанной с выходным валом второго движителя 9, жестко закрепленного на вертикальном основании 2. Органы управления аттракционом-тренажером включают ЭВМ оператора 10 с соответствующей программой, датчики обратной связи положения кабины пилота и положения промежуточной рамы 11 и 12 соответственно, ручной задатчик направления и скорости движения кабины 13, переключатель режимов работы 14 и ЭВМ кабины пилота 15 (Патент на полезную модель РФ №54522, дата публикации: 10.07.2006 г.).
Устройство позволяет совершать вращательные движения макета летательного аппарата вокруг горизонтальной оси X и горизонтальной оси т.н. У (Z), передавая перегрузки пилоту, который не может позиционировать кабину в пространстве изменяя крен и тангаж. Основные отличия данной модели - это постоянство вектора перегрузки (боковая или вертикальная таз - голова - ноги), так как кабина не вращается вокруг вертикальной оси Y и пилот не может (вследствие конструкции тренажера) ощущать перегрузку грудь-спина, отсутствие динамики перегрузки, вследствие фиксированной позиции кабины на раме, а также отсутствие восприятия 3D-виртуальной информации пространственного положения кабины и параметров движения, что является недостатками.
Другим аналогом является пилотажный тренажер, который содержит неподвижную опору 1, макет транспортного средства 2, стрелу, состоящую из двух штанг 3 и установленную на подшипнике 4 неподвижной опоры 1 с возможностью вращения вокруг вертикальной оси неподвижной опоры 1. Штанги 3 соединены с неподвижной опорой 1 цилиндрическими шарнирами 5, с макетом транспортного средства 2 - цилиндрическими шарнирами 6. Цилиндрические шарниры 5 и 6 дают возможность поворота штанг 3 в вертикальной плоскости. Макет транспортного средства 2 снабжен установленными под его днищем четырьмя колесами 7 и приводом его перемещения, включающим электродвигатели 8 с дисковыми тормозами 9, установленными на каждом колесе 7. В макете транспортного средства 2 установлен с возможностью регулирования поворота в подшипниках 10 сферический корпус 11. В свою очередь в сферическом корпусе 11 с возможностью регулирования поворота в подшипниках 12 закреплена кабина пилота 13. В последней с возможностью регулирования поворота в подшипниках 14 установлено кресло пилота 15, что позволяет снизить инерционность пилотажного тренажера в моменты изменения направления вектора полного ускорения, действующего на пилота (Патент на полезную модель РФ №121633, дата публикации: 27.12.2012 г.).
Устройство также позволяет совершать вращательные движения макета, передавая перегрузки пилоту, включая перегрузку грудь-спина и обратную. Отсутствует возможность перемещения кабины по стреле центрифуги, отсутствует возможность в виртуально получаемой информации пилотом, посредством применения шлема виртуальной реальности и программного обеспечения, а также отсутствием возможности управления пилотом процессом пилотирования. Модель предназначена исключительно для проверки или тренировки пилота к переносимости различных перегрузок, или исследований реакции пилота, при пассивной переносимости перегрузки разных направлений, что является недостатками.
Прототипом заявленного технического решения является симулятор пилотирования летательных аппаратов, включающий: кабину, содержащую кресло пилота, органы управления движением, видеоустройство; раму тангажного вращения; основание со стойками; механизмы тангажного и осевого вращения, где кабина устанавливается внутри рамы тангажного вращения с возможностью поворота вокруг своей продольной оси, а сама рама устанавливается между стойками основания посредством двух подшипниковых узлов, отличающийся тем, что рама тангажного вращения содержит вилку, соединенную с кабиной посредством подшипникового узла, выполненного на сайлент-блоках, и перпендикулярное плоскости вилки кольцо, которое охватывает кабину; снаружи кабины расположены по окружности по крайней мере три ролика, установленных с возможностью качения но упомянутому кольцу; и подшипниковые узлы стоек основания выполнены на сайлент-блоках (Патент на полезную модель РФ №130733, дата публикации: 27.07.2013 г.).
Дополнение прототипа системой визуальной информации (видеоустройство) не может вследствие конструктивных особенностей, в частности отсутствия центрифуги, передавать пилоту перегрузку грудь - спина и обратную. Поэтому нет возможности ее применения для полноценной передачи ощущения перегрузки в динамике изменений параметров пилотирования, что является недостатком.
Технический результат заявленного изобретения заключается в устранении вышеуказанных недостатков: повышение эффективности подготовки пользователя вследствие получения им тех же физических ощущений и нагрузок, что и в реальных условиях эксплуатации.
Поставленный технический результат достигается за счет устройства тренажера для подготовки, включающего центрифугу, 3D систему передачи и отображения виртуальной информации, систему управления параметрами движения, координации и позиционирования рабочих кабин, систему привода центрифуги, контроля параметров движения и автоматической остановки, рабочие кабины тренеров пилотов и центральный пункт диспетчера, в котором находится сетевой сервер, кнопка запуска и остановки центрифуги. Кабины тренеров оборудованы монитором для видеонаблюдения за пилотом, двусторонней радиосвязью с пилотом команды и диспетчером, монитором оперативной обстановки на трассе. При этом механическая центрифуга жестко установлена на фундаменте, состоит из электродвигателя с редуктором и по меньшей мере четырех стрел, расположенных на вращающейся части. На каждой стреле расположена подвижная платформа, к которой снизу крепится кабина пилота болида и программно убирающееся колесо, расположенное у основания фундамента центрифуги. Фундамент имеет нижний фланец с наружным и внутренним диаметром, на мотор-редукторе расположен конический редуктор, передающий вращение на вертикальный вал центрифуги. Привод центрифуги состоит из 3-фазного электродвигателя, привод поворота кабин также включает электродвигатели, запитанные от основания центрифуги через троллейные шинопроводы. Система управления параметрами движения, координации и позиционирования рабочих кабин состоит из блока регулировки оборотов и управления электродвигателями, электродвигателя перемещения кабины по лучу центрифуги «X», двигателей поворота кабины вокруг оси «Y1» и «X1», датчиков скольжения и перегрузки, находящихся в кабине пилота. Система привода центрифуги, контроля параметров движения и автоматической остановки, состоит из электродвигателя центрифуги и редуктора электродвигателя центрифуги, расположенных на блоке фундамента центрифуги, блока регулировки оборотов и управления электродвигателем, системы датчиков угловых скоростей, расположенных на подвижной и неподвижной частях центрифуги, и датчиков скольжения и перегрузок, расположенных в каждой кабине пилота.
Сущность полезной модели поясняется чертежами.
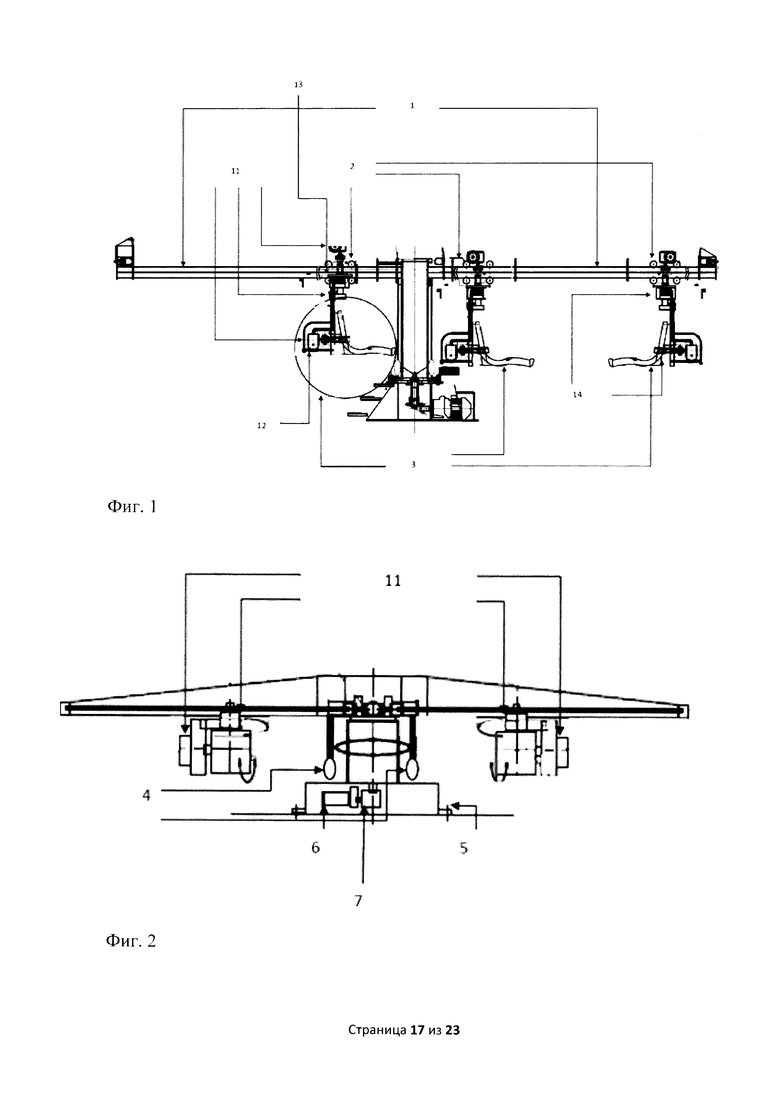
На фиг. 1 - стрела (луч) центрифуги и кресла пилотов.
На фиг. 2 - центрифуга с четырьмя стрелами и рабочими кабинами пилотов (вид сбоку).
На фиг. 3 - схематически показан общий вид устройства сверху.
На фиг. 4 - направления перегрузки при разных положениях кресла.
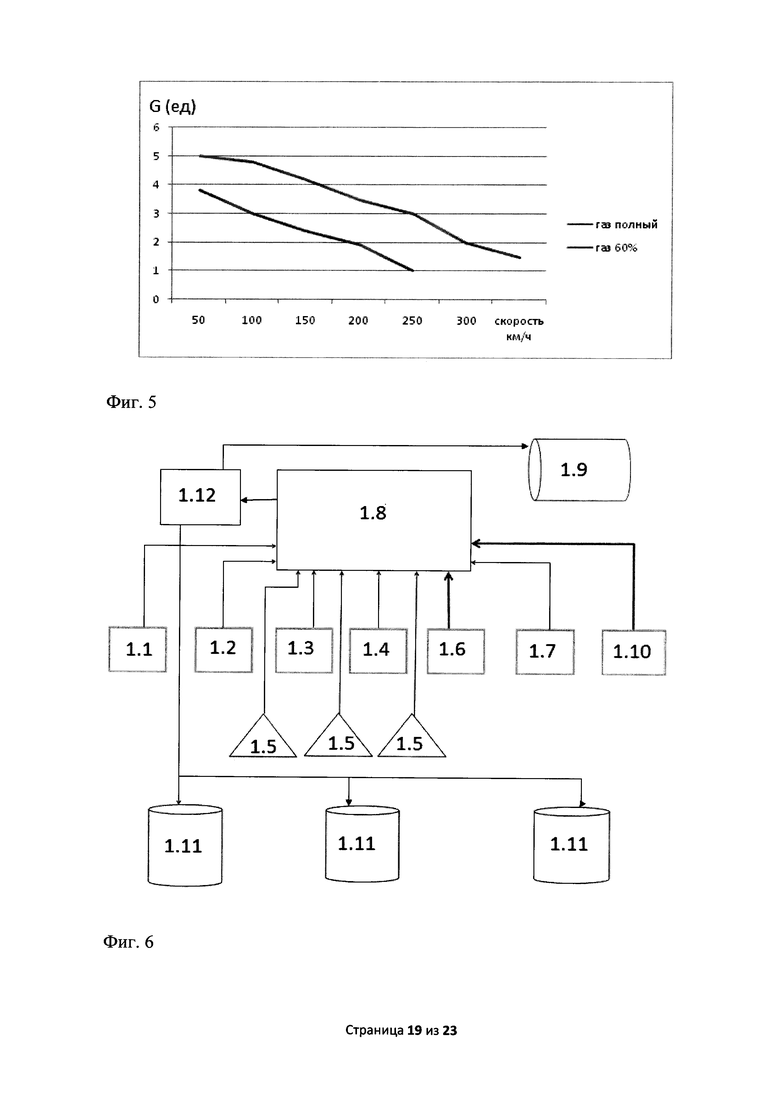
На фиг. 5 - график перегрузки в зависимости от скорости движения болида и степени нажатия на педаль газа.
На фиг. 6 - система управления параметрами движения, координации и позиционирования рабочих кабин.
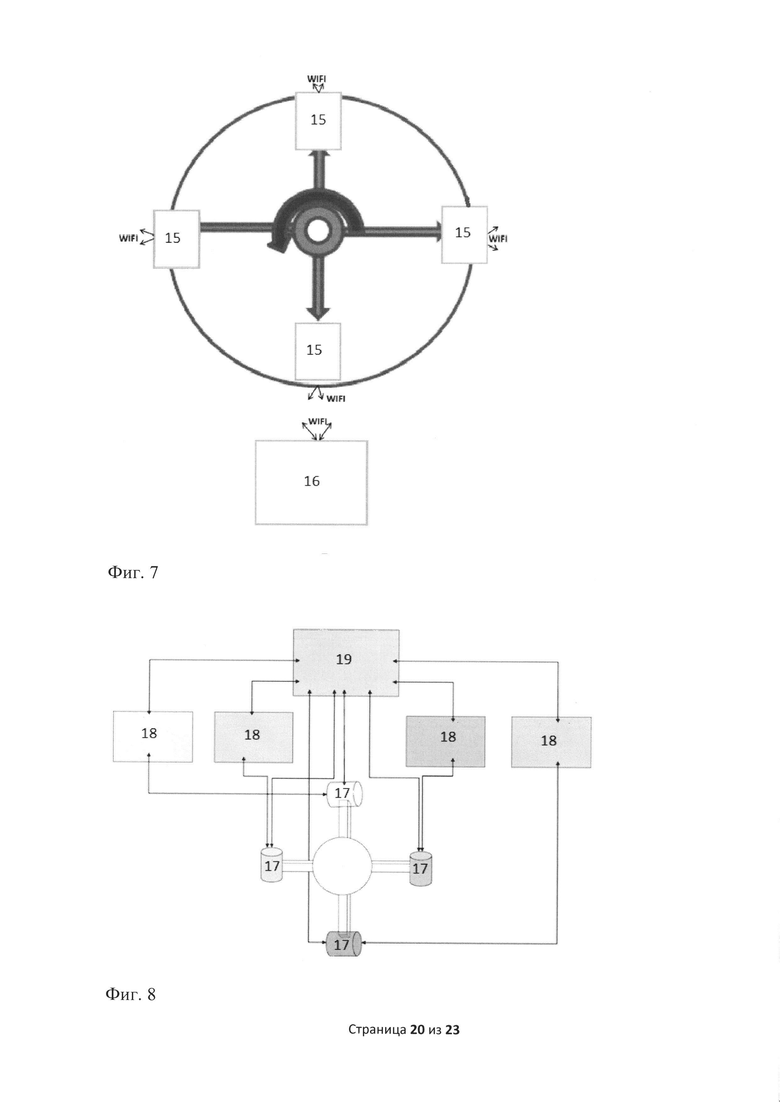
На фиг. 7 - 3D система передачи и отображения виртуальной информации.
На фиг. 8 - структурная схема радио- и видеосвязи пилотов с тренерами и центральным пультом диспетчера.
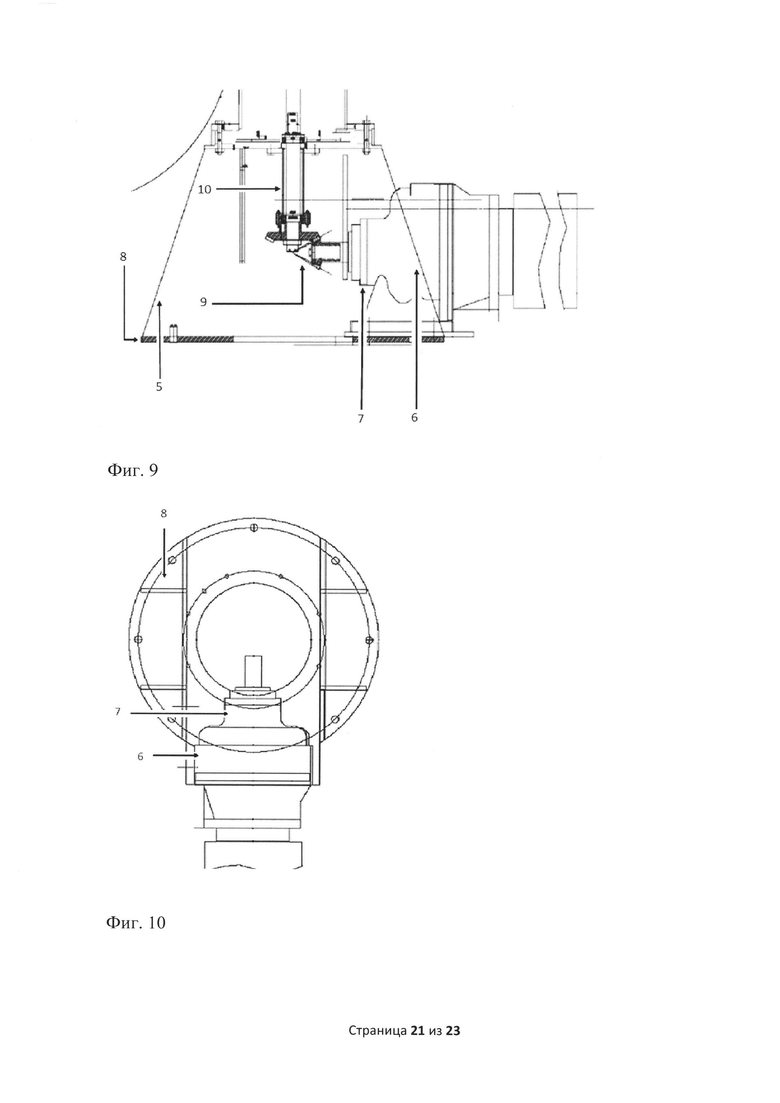
На фиг. 9 - фундамент центрифуги (вид сбоку) с элементами системы привода и остановки.
На фиг. 10 - фланец фундамента и электродвигатель центрифуги (вид сверху).
Тренажер для подготовки пилота на четыре вращающиеся стрелы (1) центрифуги, на подвижной вдоль оси (X) стрелы платформе (2) установлены кабины с креслами пилотов (3), имеющие (для данного варианта симулятора гонок на спортивном болиде) 2 степени поворота (фиг. 1, 3). Таким образом, мы имеем возможность, позиционируя кресла на луче по оси X, изменять величину перегрузки пилота каждого виртуального болида, в соответствии с виртуальным режимом движения каждого болида, а позиционируя кресло относительно вектора перегрузки (оси вращения Y1 и X1), достигать необходимого направления перегрузки на пилота (фиг. 4) Конструктивно, каждый элемент устройства, его функции и работа описаны ниже.
Механическая центрифуга состоит из фундамента (5), электродвигателя (6) с редуктором (7), (фиг. 9, 10) и четырех стрел (1) каждая длиной 4 м, расположенных на вращающейся части (фиг. 1, 3). На каждой стреле расположена подвижная платформа (2) (фиг. 1, 3), к которой крепится кабина пилота болида (3) (фиг. 1) и программно убирающееся колесо (на 200-250 мм) (4) (фиг. 2, 3), расположенное у основания фундамента центрифуги. Фундамент имеет нижний фланец (8) с наружным диаметром 1300 и внутренним 600 мм. На диаметре 1200 мм расположены 8 отверстий под фундаментные болты диаметром 36 мм (фиг. 9, 10). На мотор-редукторе расположен конический редуктор, (9) передающий вращение на вертикальный вал (10) (фиг. 9). Привод центрифуги состоит из 3-фазного электродвигателя (6) (фиг. 9, 10), привод поворотов кабин также включает электродвигатели (11) (фиг. 1, 2), запитанные от основания центрифуги через троллейные шинопроводы.
3D система отображения виртуальной информации (шлем виртуальной реальности) предназначена, для передачи виртуальной информации пилоту, его местоположения на гоночной трассе, передает информацию о его виртуальном движении и внешней обстановке. Все данные берутся исключительно из вычислительного комплекса (15), расположенного в каждой кабине болида и связанного по системе WIFI с сервером сетевой программы (16), расположенного в комнате диспетчера, в который загружена сетевая программа гонки. Каждый из пилотов имеет свой шлем программно визуализирующий местоположение его болида (пилот 1-4) на гоночной трассе (фиг. 7).
Система управления параметрами движения, координации и позиционирования рабочих кабин предназначена для управления кабинами пилотов в соответствии задаваемым пилотами параметрам движения. Состоит система из блока регулировки оборотов и управления электродвигателями (1.12 фиг. 6), электродвигателя перемещения кабины по лучу центрифуги «X» (1.11), двух двигателей поворота кабины вокруг оси «Y1» и «X1» (1.11), трех датчиков скольжения и перегрузки, находящихся в кабине пилота (1.5) (фиг. 6), (12 фиг. 1). Кроме того, в систему поступают сигналы от датчика виртуальной скорости болида (1.7), педали газа (1.1), тормоза (1.2) и датчика положения руля (1.3) (фиг. 6). Задача системы заключается в установке кабины пилота в определенную позицию на стреле центрифуги по лучу «X» и правильном позиционировании кабины пилота относительно вектора перегрузки, поворачивая кабину вокруг осей X1 и Y1, соответствующей виртуальным параметрам движения болида. Рабочий узел перемещения кабины по стреле центрифуги «X» (13) (фиг. 1), позволяет изменять радиус вращения кабины пилота и тем самым величину действующей на него перегрузки, а узел поворота кабины по оси «Y1» и «Х1» (14 фиг. 1) - вектор ее направления.
Работает система следующим образом.
После посадки пилотов в кабины болидов, при желтом свете на виртуальном светофоре тренажера (информация пилоту отображается в (виртуальном шлеме), запускается электродвигатель и центрифуга начинает медленно вращаться, до угловой скорости 150 град/сек. При этом кабины пилотов позиционируются на радиусе вращения до 1,5 м, а датчики скольжения и перегрузки в каждой из кабин болидов выдают сигнал в систему координации и позиционирования кабин на поворот кресел по оси Y1, устраняя боковую перегрузку. Таким образом пилоты находятся в естественной среде (перегрузка 1 ед. табл. А направление грудь-спина).
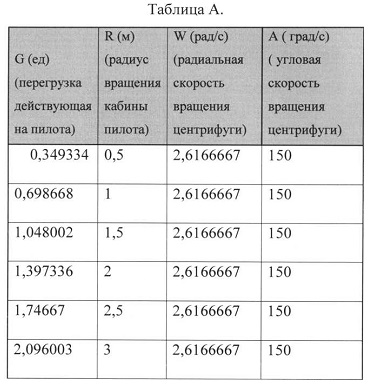
При загорании зеленого сигнала светофора пилоты нажимают педаль газа и начинают виртуальное движение по гоночной трассе. В этот момент, (нажатием любого из пилотов педали газа) центрифуга начинает ускорение до 200 град/сек., а сами кабины пилотов перемещаются по лучу центрифуги (X) на позиции, соответствующие уровню перегрузки при ускорении болида (в зависимости от степени нажатия педали газа). См. график ускорения болида и перегрузок на пилота в зависимости от скорости движения и степени нажатия педали газа (фиг.5)
При этом датчики скольжения выдают сигналы в систему управления на устранение боковых перегрузок (если пилот не поворачивает руль), а датчик перегрузки дает сигнал на остановку кабины в позиции, соответствующей программной перегрузке. При прохождении пилотом поворотного участка трассы, или маневрировании при обгоне, с датчика поворота руля (при его отклонении от нулевой позиции) снимается сигнал, пропорциональный углу поворота руля, программно обрабатывается данными виртуальной скорости в блоке координации и положения кабины и с него, через блок управления электродвигателями, поступает на двигатель поворота кабины по оси «Y1» на поворот кабины и создание боковой перегрузки, соответствующей угловому ускорению болида. При достижении программной боковой перегрузки датчик боковой перегрузки фиксирует угол поворота кабины болида до момента поступления новых данных с датчиков руля и виртуальной скорости болида. При завершении маневра система работает подобным образом, приводя боковую перегрузку к нулевому значению.
Система визуальной и звуковой связи с пилотами, регистрации физического состояния пилота состоит из видеокамер, расположенных в каждой кабине пилота (17), а также беспроводной радиосвязи пилота с тренером (18) и центральным диспетчерским пультом (19) фиг. 8. Кроме того, система микширует шум работы виртуального двигателя болида, шум сцепления колес виртуального болида с покрытием гоночной трассы. В каждой тренерской кабине размещены мониторы визуального наблюдения за пилотом болида и параметрами виртуального движения, а в комнате диспетчера монитор наблюдения за каждым пилотом (фиг.8).
Система привода центрифуги, контроля параметров движения и автоматической остановки в аварийных случаях. Назначение системы в обеспечении вращения центрифуги, поддержания стабильных оборотов вращения (начальная скорость 150 град/с и рабочая 200 град/с), а также автоматической остановки, при превышении скорости вращения до 250 град/с, или перегрузки, по любому направлению 5 ед. Система включает электродвигатель центрифуги, (6 фиг. 9, 10) блок регулировки оборотов и управления электродвигателем (1.12 фиг. 6), систему датчиков угловых скоростей, расположенных на подвижной и неподвижной частях центрифуги, и датчиков скольжения и перегрузок, расположенных в каждой кабине пилота. Кроме того, система может управляться с центрального пульта диспетчера.
Рабочие кабины тренеров пилотов и центральный пункт диспетчера. Предназначены для тренерского контроля за прохождением гоночной трассы пилотом команды, передачи оперативных подсказок местоположения соперника, времени прохождения и прочих рабочих моментов гонки пилоту, визуального контроля за состоянием пилота, его действиями и параметрами виртуального движения. Кроме того, в центральном пункте диспетчера находится сетевой сервер игры, кнопка запуска и остановки центрифуги. Оборудованы кабины тренеров монитором для видеонаблюдения за пилотом, двусторонней радиосвязью с пилотом команды и диспетчером игры, монитором оперативной обстановки на трассе (местоположение соперников), а центральный пункт диспетчера имеет дополнительное оборудование по управления центрифугой, видео- и радиосвязь с каждым пилотом и тренерами.
После посадки 4-х участников гонки в кабины болидов, их механической фиксации к креслам (1,6 фиг. 6), подключения гарнитуры связи и 3D шлемов виртуальной информации, тренеры и диспетчер центрифуги занимают свои рабочие места (каждый в своей кабинке, имитирующих 4 независимых команды гонщиков и ЦП управления гонкой). С каждым пилотом устанавливается визуальная (система видеонаблюдения) и радиосвязь, причем тренеры контролируют только своего пилота, а диспетчер центрифуги имеет радиосвязь и наблюдает на мониторе всех 4-х пилотов.
Далее запускается компьютерная программа гонки, выдающая информацию в шлемы каждого пилота - звуковую информацию (работу двигателя), 3D видеоинформацию, позиционируя в ней болиды на стартовых позициях, показания светофора (красный цвет) и включающая начало вращения центрифуги до начального режима вращения (разогрев) 150 град/с. Датчик скольжения в кабине болида при начале вращения центрифуги выдает сигнал бокового скольжения, который программным комплексом и системой координации и позиционирования кабин (в дальнейшем СКиП) устраняет скольжение, поворачивая кабины вокруг вертикальной оси Y1, а датчик перегрузки позиционирует кабину на стреле центрифуги, обеспечивая параметры перегрузки грудь-спина 1 ед. По истечении 15-30 с на виртуальном светофоре загорается зеленый свет, пилоты нажимают педаль газа для старта болида. Нажатие любой педали газа дает основной старт центрифуге, доводя ее до расчетных постоянных оборотов (200 град/ с) а СКиП каждой кабины, в зависимости от интенсивности и момента нажатия на педаль позиционирует ее в соответствии с программной стартовой перегрузкой (до 3-4 единиц) на увеличение радиуса вращения и дальнейшего поворота вокруг вертикальной оси, (Y1) устраняя боковую перегрузку.
Дальнейшее движение по трассе пилот производит согласно визуальной информации 3D шлема, оперируя органами управления болида. Кривая изменения перегрузки пилота (фиг. 5) обеспечивает при меньшей приборной скорости и нажатии на педаль газа более интенсивную перегрузку, а при максимальной скорости - близкую или равную 1 ед.). Достигнув максимальной или стабильной скорости, СКиП переводит кабины на минимальный радиус вращения, соответствуя перегрузке 1 ед (хотя приборная скорость при этом может быть максимальной). Каждое изменение скорости прорабатывается программным комплексом и СКиП, двигая кабину на увеличение, или уменьшение радиуса вращения, а при торможении, поворачивает пилота спиной к оси вращения, позиционируя по стреле центрифуги в положение, соответствующее перегрузке интенсивности торможения.
Действия СКиП при поворотах болида на трассе выглядят следующим образом: пилот, входя в поворот, поворачивает руль на определенный угол (зависит от угла поворота трассы и виртуальной скорости движения болида по трассе). СКиП снимает параметры скорости и угла поворота руля и в соответствии программно-расчетных характеристик дает команду блоку регулировки оборотов и управления электродвигателями на создание боковой перегрузки, разворачивая кабину таким образом, чтобы боковая перегрузка соответствовала модулю и направлению расчетной. После выхода из поворота и возврата руля в нейтральное положение СКиП дает команду на устранение боковой перегрузки.
Каждая из кабин работает со своей СКиП и зависит только от режимов движения данного болида и положения органов управления. Таким образом, мы имеем независимо 4 болида, которые пилотируются индивидуально и имеют индивидуальные режимы движения. Система визуальной и звуковой связи с пилотами, регистрации физического состояния пилота обеспечивает двустороннюю связь тренера с пилотом болида, возможность подсказки местоположения (при большом отставании или опережении), визуальном наблюдении за состоянием пилота (а диспетчеру центрифуги - за всеми пилотами), а также дает возможность диспетчеру центрифуги снимать и фиксировать параметры физического состояния пилота во время движения по трассе (при подключении необходимого оборудования с целью научной работы или исследований).
Система привода центрифуги, контроля параметров движения и автоматической остановки в аварийных случаях обеспечивает старт центрифуги (прогрев), дальнейший ее разгон до программной скорости вращения и поддержание ее, на протяжении всей гонки, автоматическую аварийную остановку при превышении максимальной скорости вращения, максимальной перегрузки кабины болида, аварийных сигналах превышения амплитуды тряски кабины и потери связи с бортовым комплексом СКиП.
Назначение рабочих кабин тренеров пилотов и центральный пункт диспетчера предназначены для организации информационной поддержки пилотов на трассе, визуального и речевого контроля за состоянием пилотов, а также ручного отключения центрифуги при визуальном обнаружении ухудшении самочувствия пилота.
В предлагаемом техническом решении скорость нарастания перегрузки от 1 до 5 ед - 1 с, от -5 до 5 ед - 2,2 с, которая обеспечивается скоростью перемещения кабин пилотов по оси X из минимального радиуса на стреле центрифуги на максимальный за 1 с.
Таким образом, осуществляется достижение максимально приближенных физических ощущений к фактическим параметрам движения вследствие получения обучаемым тех же физических ощущений, что и в реальных условиях пилотирования. Закрепление пользователем моторики и реальных физических ощущений на тренажере, что дает возможность уменьшить количество часов реального пилотирования, отработка способов исправления ошибок пилотирования на тренажере путем их осознанного ввода и ощущение физических нагрузок при их исправлении, кроме того, использование 4-х независимых кабин позволяет проводить групповые тренировки и соревнования.
Таким образом, проведенный анализ и испытание опытного образца подтверждают достижение технического результата заявленного изобретения, заключающегося в повышении эффективности подготовки пользователя вследствие получения обучаемым тех же физических ощущений и нагрузок, что и в реальных условиях пилотирования (эксплуатации).
Вышеперечисленное доказывает также соответствие заявленного способа критериям изобретательского уровня, поскольку оно для специалиста явным образом не следует из уровня техники.
Изобретение является новым, поскольку вся совокупность признаков не известна из предшествующего уровня техники, приведенной в соответствующем разделе описания, а также промышленно применимом в указанной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегральная система дистанционного обучения пилотированию летательных аппаратов, комплексных испытаний и видеоконференцсвязи | 2018 |
|
RU2703325C1 |
| Комплексная система дистанционного обучения пилотированию летательных аппаратов | 2016 |
|
RU2647345C1 |
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ КОМПЛЕКСА ЗАДАЧ ПО ИССЛЕДОВАНИЮ АСТРОНОМИЧЕСКОГО ОБЪЕКТА УЧАСТНИКАМИ КОСМИЧЕСКОЙ ЭКСПЕДИЦИИ | 2015 |
|
RU2581643C1 |
| МЕТОД ПРОСТРАНСТВЕННОГО ПРОЕКТИРОВАНИЯ ТРЕНАЖЕРОВ ДЛЯ ЛЕТАТЕЛЬНЫХ И КОСМИЧЕСКИХ АППАРАТОВ И АВИАЦИОННЫЙ ТРЕНАЖЕР СОГЛАСНО МЕТОДУ | 2012 |
|
RU2659663C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР | 2006 |
|
RU2326447C1 |
| ТРЕНАЖЕР | 1992 |
|
RU2037209C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАЗЕМНЫМ ДВИЖЕНИЕМ МОБИЛЬНЫХ ОБЪЕКТОВ НА АЭРОДРОМЕ | 2014 |
|
RU2560220C1 |
| ПИЛОТАЖНЫЙ ТРЕНАЖЕР НА ОСНОВЕ ЦЕНТРИФУГИ | 2012 |
|
RU2591108C2 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |

Заявленное изобретение относится к области массовых развлечений и тренировочным аппаратам и может быть использовано в разных модификациях в сфере отдыха и развлечений, а также для профессиональной подготовки водителей автомобилей, пилотов спортивных болидов и пр. Тренажер для подготовки пилота содержит центрифугу, 3D систему передачи и отображения виртуальной информации, систему управления параметрами движения, координации и позиционирования рабочих кабин, систему привода центрифуги, контроля параметров движения и автоматической остановки, рабочие кабины тренеров пилотов и центральный пункт диспетчера, в котором находится сетевой сервер, кнопка запуска и остановки центрифуги. Кабины тренеров оборудованы монитором для видеонаблюдения за пилотом, двусторонней радиосвязью с пилотом команды и диспетчером, монитором оперативной обстановки на трассе. Механическая центрифуга жестко установлена на фундаменте, состоит из электродвигателя с редуктором и по меньшей мере четырех стрел, расположенных на вращающейся части. На каждой стреле расположена подвижная платформа, к которой снизу крепится кабина пилота болида и программно убирающееся колесо, расположенное у основания фундамента центрифуги. В фундаменте установлен нижний фланец с наружным и внутренним диаметром, на мотор-редукторе расположен конический редуктор, передающий вращение на вертикальный вал центрифуги. Привод центрифуги содержит 3-фазный электродвигатель, привод поворота кабин также включает электродвигатели, запитанные от основания центрифуги через троллейные шинопроводы. Система управления параметрами движения, координации и позиционирования рабочих кабин содержит блок регулировки оборотов и управления электродвигателями, электродвигатель перемещения кабины по лучу центрифуги «X», двигатели поворота кабины вокруг оси «Y» и «X1», датчики скольжения и перегрузки, находящиеся в кабине пилота. Система привода центрифуги, контроля параметров движения и автоматической остановки содержит электродвигатель и редуктор электродвигателя центрифуги, расположенные на блоке фундамента центрифуги. Система также имеет блок регулировки оборотов и управления электродвигателем, систему датчиков угловых скоростей, расположенных на подвижной и неподвижной частях центрифуги, и датчики скольжения и перегрузок, расположенные в каждой кабине пилота. Технический результат заявленного изобретения заключается в повышении эффективности подготовки пользователя вследствие получения им тех же физических ощущений и нагрузок, что и в реальных условиях эксплуатации. 10 ил., 1 табл.
Устройство тренажера для профессиональной подготовки, включающее центрифугу, 3D систему отображения виртуальной информации, систему управления параметрами движения, координации и позиционирования рабочих кабин, систему привода центрифуги, контроля параметров движения и автоматической остановки, рабочие кабины тренеров пилотов и центральный пункт диспетчера, в котором находится сетевой сервер, кнопка запуска и остановки центрифуги, кабины тренеров оборудованы монитором для видеонаблюдения, двусторонней радиосвязью с пилотом команды и диспетчером, монитором оперативной обстановки на трассе, отличающееся тем, что механическая центрифуга жестко установлена на фундаменте, состоит из электродвигателя с редуктором и по меньшей мере четырех стрел, расположенных на вращающейся части, на каждой стреле расположена подвижная платформа, к которой снизу крепится кабина пилота болида и программно убирающееся колесо, расположенное у основания фундамента центрифуги, фундамент имеет нижний фланец с наружным и внутренним диаметром, на мотор-редукторе расположен конический редуктор, передающий вращение на вертикальный вал, привод центрифуги состоит из 3-фазного электродвигателя, привод поворота кабин также включает электродвигатели, запитанные от основания центрифуги через троллейные шинопроводы, при этом система управления параметрами движения, координации и позиционирования рабочих кабин состоит из блока регулировки оборотов и управления электродвигателями, электродвигателя перемещения кабины по лучу центрифуги «X», двигателей поворота кабины вокруг оси «Y1» и «X1», датчиков скольжения и перегрузки, находящихся в кабине пилота; при этом система привода центрифуги, контроля параметров движения и автоматической остановки состоит из электродвигателя центрифуги и блока регулировки оборотов и управления электродвигателем, системы датчиков угловых скоростей, расположенных на подвижной и неподвижной частях центрифуги, и датчиков скольжения и перегрузок, расположенных в каждой кабине пилота.
| Машина для обрезки ботвы у не потревоженной свеклы | 1959 |
|
SU130733A1 |
| КОМПЛЕКСНЫЙ ТРЕНАЖЁР ДЛЯ КОСМОНАВТОВ | 2013 |
|
RU2534474C2 |
| US 20140212848 A1, 31.07.2014 | |||
| WO 2008081406 A1, 10.07.2008. | |||

