Изобретение относится к автоматизированным средствам обучения и может быть использовано при создании унифицированных процедурных тренажеров для подготовки специалистов к эксплуатации сложных видов техники, предусматривающих включение в контур управления этими системами человека, например, летательных аппаратов (ЛА) военной и гражданской авиации, отказы которой по причине т.н. «человеческого фактора» могут приводить к многочисленным человеческим жертвам, большим наземным разрушениям и возникновению техногенных катастроф.
Из существующего уровня техники известен адаптивный имитатор загрузки на рычагах управления авиационного тренажера, имеющий ручку управления с осью вращения и вилкой крепления, кинематически связанный с датчиком ее перемещений, вычислительным комплексом, системой управления двигателем и загрузочным устройством (см. РФ, Свидетельство на полезную модель №23014, МПК7 G 09 В 9/08, 2001 г.).
Из существующего уровня техники также известна система подвижности кабины пилотажного тренажера летательного аппарата, содержащая основание, с установленным в нем поддерживающего корпуса с возможностью вращения по углам тангажа в вертикальной плоскости вокруг горизонтальной оси, перпендикулярной плоскости симметрии ЛА, закрепленную в поддерживающем корпусе платформу, с установленной на ней натурной кабиной ЛА с возможностью вращения по углам крена в вертикальной плоскости, перпендикулярной продольной оси ЛА (см. РФ, Свидетельство на полезную модель №23210, МПК7 G 09 В 9/08, 2001 г.).
Наиболее близким техническим решением, выбранным за прототип, является унифицированный тренажер летных экипажей летательных аппаратов, содержащий натурную кабину летательного аппарата с органами управления и контроля, имеющую приборную доску с установленными на ней имитаторами электромеханических приборов и индикаторов, выполненную на базе системы жидкокристаллических (ЖК) мониторов, с возможностью формирования на них программным способом изображений символов электромеханических приборов и индикаторов и воспроизведения их функционирования в соответствии с моделью работы оборудования в режиме реального времени, и снабженную модулем акустических шумов, а также вычислительную управляющую систему (ВУС) в виде модуля с носителями программно-математического обеспечения (см. РФ, Свидетельство на полезную модель №14689, МПК7 G 09 В 9/24, 2000 г.).
Достижению требуемого технического результата во всех приведенных выше аналогах, включая прототип, препятствует то, что ни одна из описанных систем не может быть использована для комплексной подготовки технического персонала, обслуживающего и эксплуатирующего различные сложные технические системы, предусматривающие включение в контур управления этими системами человека. К таким сложным техническим системам могут быть отнесены летательные аппараты военной и гражданской авиации (самолеты, вертолеты), космические аппараты, подводные лодки, надводные корабли и т.п.
Достижению требуемого технического результата препятствует также отсутствие во всех приведенных аналогах и прототипе возможности получения комплексной информации по всем вопросам подготовки, эксплуатации и обслуживания реальной техники для приобретения теоретических знаний, навыков и умений.
Задачей, на решение которой направлено заявленное изобретение, является создание унифицированного процедурного тренажера, позволяющего в режиме реального времени проводить обучение и тестирование технического персонала, обслуживающего и эксплуатирующего сложные технические системы, такие как, например, летательные аппараты и/или космические аппараты, предусматривающие включение в контур управления этими системами человека.
К техническим результатам, получаемым при решении поставленной задачи от реализации заявленного изобретения, можно отнести повышение уровня и качества обучения, сокращение времени освоения изучаемого образца техники, приобретение навыков и умений по выполнению необходимых процедур при обслуживании и подготовки реальной техники к эксплуатации, в том числе, в нештатных ситуациях, при экономии материальных затрат, расходуемых при обучении на реальной технике.
Поставленная задача решается, а технический результат достигается тем, что в унифицированном процедурном тренажере летного и технического персонала летательного аппарата, содержащем кабину летательного аппарата с органами управления и контроля, имеющую приборную доску с установленными на ней имитаторами электромеханических приборов и индикаторов, выполненную на базе системы жидкокристаллических (ЖК) мониторов, с возможностью формирования на них программным способом изображений символов электромеханических приборов и индикаторов и воспроизведения их функционирования в соответствии с моделью работы оборудования в режиме реального времени, и снабженную модулем акустических шумов, а также вычислительную управляющую систему в виде модуля с носителями программно-математического обеспечения, согласно изобретению кабина летательного аппарата в унифицированном тренажере летного и технического персонала выполнена в виде макета кабины с интерьером, соответствующим реальной кабине летательного аппарата, выполнена из конструктивных блоков, содержащих органы управления, контроля и индикации, размещенные в местах и в последовательности, соответствующих их размещению в реальной кабине летательного аппарата, модуль вычислительной управляющей системы выполнен в виде распределенной вычислительной системы, состоящей из n+1 системных блоков персональных компьютеров, блока связи, блока имитации систем и оборудования и блока сетевого распределителя, и снабжен, по крайней мере, одним программным блоком, обеспечивающим подготовку технического и летного персонала для выполнения процедур по контролю и подготовке систем и оборудования летательного аппарата перед выполнением полетного задания, процедурный тренажер снабжен микроконтроллерной системой, выполненной в виде системы распределенных контроллеров и имеющей головной контроллер, размещенных в конструктивных блоках макета кабины летательного аппарата, причем микроконтроллеры конструктивных блоков макета кабины летательного аппарата объединены локальной вычислительной сетью, управляемой головным контроллером, подключенным к вычислительной управляющей системе и осуществляющим связь между вычислительной управляющей системой и микроконтроллерной системой, при этом программные имитационные модели работы оборудования реального летательного аппарата инсталлированы в системных блоках вычислительной управляющей системы, обмен данными между которыми осуществляется по кабельной сети через блок сетевого распределителя, процедурный тренажер снабжен модулем управления загрузкой командных органов управления, выполненным в виде системы исполнительных механизмов, с возможностью обеспечения имитации реальных законов управления и с обеспечением программным способом логики загрузки командных органов управления (крен, тангаж, курс, управление вектором тяги двигателей и т.п.) в зависимости от режимов управления, процедурный тренажер снабжен модулем спецпульта управления, выполненным в виде единого блока, содержащего, по крайней мере, два монитора и клавиатуру, и имеющего возможность поворота относительно вертикальной оси и фиксации в любом заданном положении и обеспечивающего внесение в систему внешних условий и «имитации» подключения к тренажеру внешнего оборудования (заправщиков топлива, источников электропитания, пультов, контрольно-проверочной аппаратуры, внешних подвесок и т.п.) и работы с ними, а также процедурный тренажер снабжен модулем управления, контроля и индикации технического состояния тренажера с органами включения и выключения, индикацией значений напряжений питания и отказавшего оборудования процедурного тренажера.
Программное обеспечение вычислительной управляющей системы может быть выполнено в виде программных моделей, имитирующих работу реальных систем и оборудования летательного аппарата в режиме реального времени.
Модуль управления загрузкой командных органов управления может быть выполнен состоящим из «m» каналов, каждый из которых содержит исполнительный механизм, датчик положения и программный блок управления.
Модуль спецпульта управления может быть выполнен с возможностью обеспечения ввода внешних наружных условий - наружной температуры, наружного атмосферного давления, режимов работы и нештатных ситуаций (отказы техники, аварийные ситуации).
Борта макета кабины летательного аппарата могут быть выполнены поворотными относительно вертикальной оси с возможностью их фиксации в любом заданном положении и с возможностью их демонтажа.
Жидкокристаллические мониторы, устанавливаемые вместо штатных приборов, индикаторов и пультов, могут быть выполнены сенсорными для вызова дополнительной информации в процессе обучения путем воздействия на них (прикосновения) пальцами на соответствующую область экрана монитора.
Экраны жидкокристаллических мониторов могут быть снабжены закрывающими их лицевыми панелями с вырезами под приборы и индикаторы с органами управления и электропроводкой на внутренней поверхности.
Модуль управления, контроля и индикации технического состояния тренажера может быть снабжен счетчиком наработки.
Модуль спецпульта управления в виде единого блока может быть выполнен на магнитном основании с возможностью магнитной фиксации в любом заданном положении.
Изобретение поясняется чертежами, где
На фиг.1 изображена принципиальная схема унифицированного процедурного тренажера.
На фиг.2 - общий вид натурного образца унифицированного процедурного тренажера.
Унифицированный процедурный тренажер представляет собой программно-аппаратный комплекс, имитирующий работу систем и оборудования изучаемого летательного аппарата и предназначен для обучения летного и технического персонала летательного аппарата решению комплекса задач, связанных с обслуживанием и подготовкой к надежной эксплуатации летательных аппаратов.
Унифицированный процедурный тренажер летного и технического персонала летательного аппарата имеет кабину 1 летательного аппарата с органами управления и контроля. Кабина 1 летательного аппарата имеет приборную доску 2 с установленными на ней имитаторами 3 электромеханических приборов и индикаторов. Приборная доска 2 выполнена на базе системы жидкокристаллических (ЖК) мониторов (не показано) с возможностью формирования на них программным способом изображений символов электромеханических приборов и индикаторов и воспроизведения их функционирования в соответствии с моделью работы оборудования в режиме реального времени. Кабина 2 снабжена модулем 4 акустических шумов, а также вычислительной управляющей системой (БУС) 5 в виде модуля с носителями программно-математического обеспечения.
Кабина 1 летательного аппарата в унифицированном тренажере летного и технического персонала выполнена в виде макета кабины, с интерьером, соответствующим реальной кабине летательного аппарата, и выполненным из конструктивных блоков 6, содержащих органы управления, контроля, индикации (не показано), размещенных в местах и в последовательности, соответствующих их размещению в реальной кабине летательного аппарата.
Модуль 5 вычислительной управляющей системы выполнен в виде распределенной вычислительной системы, состоящей из n+1 системных блоков 7 персональных компьютеров, блока связи, блока имитации систем и оборудования (не показаны) и блока сетевого распределителя 8, и снабжен, по крайней мере, одним программным блоком, обеспечивающим подготовку технического и летного персонала для выполнения процедур по контролю и подготовке систем и оборудования летательного аппарата перед выполнением полетного задания.
Процедурный тренажер снабжен микроконтроллерной системой, выполненной в виде системы распределенных контроллеров (не показано) и имеющей головной контроллер 9, размещенных в конструктивных блоках 6 макета кабины 1 летательного аппарата.
Микроконтроллеры конструктивных блоков 6 макета кабины 1 летательного аппарата объединены локальной вычислительной сетью (не показано), управляемой головным контроллером 9, подключенным к вычислительной управляющей системе 5 и осуществляющим связь между вычислительной управляющей системой 5 и микроконтроллерной системой.
Программные имитационные модели работы оборудования реального летательного аппарата инсталлированы в системных блоках 7 вычислительной управляющей системы 5, обмен данными между которыми осуществляется по кабельной сети через блок сетевого распределителя 8.
Процедурный тренажер снабжен модулем 10 управления загрузкой командных органов управления, выполненным в виде системы исполнительных механизмов 11, с возможностью обеспечения имитации реальных законов управления, с обеспечением программным способом логики загрузки командных органов управления (крен, тангаж, курс, управление вектором тяги двигателей и т.п.) в зависимости от режимов управления.
Модуль 10 управления загрузкой командных органов управления выполнен состоящим из «m» каналов, каждый из которых содержит исполнительный механизм 11, датчик положения (не показано) и программный блок управления (не показано).
Процедурный тренажер снабжен модулем 12 спецпульта управления, выполненным в виде единого блока, содержащего, по крайней мере, два монитора 13 и клавиатуру 14 и имеющего возможность поворота относительно вертикальной оси и фиксации в любом заданном положении, и обеспечивающего внесение в систему внешних условий и «имитации» подключения к тренажеру внешнего оборудования (заправщиков топлива, источников электропитания, пультов, контрольно-проверочной аппаратуры, внешних подвесок и т.п.) и работы с ними.
Также процедурный тренажер снабжен модулем 15 управления, контроля и индикации технического состояния тренажера с органами включения и выключения, индикацией значений напряжений питания и отказавшего оборудования процедурного тренажера.
Программное обеспечение вычислительной управляющей системы 5 выполнено в виде программных моделей, имитирующих работу реальных систем и оборудования летательного аппарата в режиме реального времени.
Модуль 12 спецпульта управления выполнен с возможностью обеспечения ввода внешних наружных условий - наружной температуры, наружного атмосферного давления, режимов работы и нештатных ситуаций (отказы техники, аварийные ситуации).
Борта 16 макета кабины 1 летательного аппарата выполнены поворотными относительно вертикальной оси с возможностью их фиксации в любом заданном положении и с возможностью их демонтажа.
Жидкокристаллические мониторы, устанавливаемые вместо штатных приборов и индикаторов, выполнены сенсорными для вызова дополнительной информации в процессе обучения путем воздействия на них (прикосновения) пальцами на соответствующую область экрана монитора.
Экраны жидкокристаллических мониторов снабжены закрывающими их лицевыми панелями (не показано) с вырезами под приборы и индикаторы с органами управления и электропроводкой на внутренней поверхности.
Модуль 15 управления, контроля и индикации технического состояния тренажера снабжен счетчиком наработки.
Модуль 12 спецпульта управления в виде единого блока может быть выполнен на магнитном основании с возможностью магнитной фиксации в любом заданном положении.
Унифицированный процедурный тренажер летного и технического персонала летательного аппарата функционирует следующим образом.
Включение (подача электропитания) и выключение процедурного тренажера осуществляется с модуля 15 управления, контроля и индикации технического состояния тренажера. После включения процедурного тренажера происходит тест-контроль оборудования с индикацией на панель (не показано) модуля 15; также постоянно идет индикация значения напряжения питания. Системные блоки 7 вычислительной управляющей системы 5 запитываются через блоки питания (не показано).
В кабине 1 на приборной доске 2 появляются изображения всех приборов и индикаторов, имитированных жидкокристаллическими мониторами (не показано), а на мониторы 13 модуля 12 спецпульта управления выводится меню всех работ на процедурном тренажере, перечень которых соответствует инструкции по эксплуатации изучаемого объекта. При этом управление жидкокристаллическими мониторами, имитирующими работу приборов, мониторами 13 модуля 12 спецпульта управления осуществляет модуль 5 вычислительной управляющей системы.
Пользователь вводит внешние данные (температуру, атмосферное давление и т.п.) и вызывает на мониторы 13 модуля 12 спецпульта управления внешние пульты, контрольно-проверочное оборудование, источники электропитания, гидродавления, заправщики (топливом, воздухом, кислородом, азотом, внешние подвески) (не показано) и т.п., и производит с ними действия, необходимые для проверки, контроля оборудования и процедур по заправкам и подключению электропитания. Т.е., обучаемый учится производить все необходимые действия на процедурном тренажере, как на реальном объекте.
В случае неправильных действий обучаемого режим не включается. В режиме обучения пользователь может вызвать на монитор модуля 12 спецпульта управления «правильный порядок действий». В режиме контроля справочный материал недоступен.
На процедурном тренажере реализуются следующие режимы работы:
- режим выполнения процедур, связанных с проведением контрольно-проверочных операций на образце в соответствии с инструкцией по эксплуатации и регламенту;
- рабочие режимы, например: запуск двигателей, проверка оборудования перед вылетом на ЛА и т.д.;
- изучение путем ввода через модуль 12 спецпульта управления нештатных ситуаций (отказы систем и оборудования) на ЛА.
Сбор и отражение информации о состоянии органов управления, индикации и режимах работы программных имитационных моделей и их запуск осуществляет микроконтроллерная система, представляющая собой систему распределенных контроллеров (не показаны), конструктивно размещенных в конструктивных блоках 6 макета кабины 1 летательного аппарата. Все блоки 6 объединены локальной вычислительной сетью (не показана), которой управляет головной контроллер 9, подключенный к модулю 5 вычислительной управляющей системы.
Программные имитационные модели работы оборудования реального летательного аппарата инсталлированы в системных блоках 7 модуля 5 вычислительной управляющей системы, обмен данными между которыми осуществляется по кабельной сети (не показана) через блок сетевого распределителя 8.
Входные данные модуля 5 вычислительной управляющей системы формируются на основании информации о состоянии органов управления, расположенных в макете кабины 1 летательного аппарата. Состояние органов управления, расположенных в макете кабины 1 - кнопок, переключателей, ручек и пр., передаются через блок связи в блок имитации систем и оборудования. Положение ручки управления летательным аппаратом, педалей, рычагов управления двигателями передаются в блок имитации систем и оборудования модуля 5 вычислительной управляющей системы из модуля 10 управления загрузкой командных органов управления от датчиков положения.
Связь между модулем 5 вычислительной управляющей системы и микроконтроллерной системой осуществляется через головной контроллер 9.
В соответствии с программными моделями работы имитаторов систем и оборудования реального ЛА по сигналам модуля 5 вычислительной управляющей системы включается в работу модуль акустических шумов 4, воспроизводящий реальные шумы, переговоры членов экипажа и т.п. Модуль акустических шумов 4 предназначен для имитации звуковой обстановки в макете кабины 1 и вне его: переговоры членов экипажа, речевая информация, шумовые эффекты работы двигателей и срабатывания различного оборудования. Программное обеспечение по включению шумов и звуков закладывается в один из блоков модуля 5 вычислительной управляющей системы. Шумы и звуки включаются в соответствии с логикой работы реальных систем летательного аппарата.
Модуль 5 вычислительной управляющей системы снабжен, по крайней мере, одним программным модулем, обеспечивающим подготовку технического и летного персонала для выполнения процедур по контролю и подготовке систем и оборудования летательного аппарата перед выполнением полетного задания.
Модуль 10 управления загрузкой командных органов управления состоит из «m» каналов - для летательного аппарата - крен, тангаж, курс. Каждый из «m» каналов состоит из исполнительных механизмов 11, датчика положения (не показан) и программного блока управления (не показано). Датчики положения передают в модуль 5 вычислительной управляющей системы информацию о положении органов управления.
Управление моделью образца летательного аппарата производится путем изменения положения командных органов управления. Их состояние оценивается с помощью датчиков, информация с которых поступает в модуль 5 вычислительной системы управления. Опрос датчиков производит контроллер, находящийся в макете кабины 1 ЛА. Он же выдает команды для управления исполнительными механизмами 11 модуля 10 управления загрузкой командных органов управления. Данные о положении командных органов управления, переданные в модуль 5 вычислительной системы управления, позволяют сформировать информацию режимах работы системы загрузки. На основании данной информации формируются и передаются на исполнительные механизмы 11 команды на обеспечение соответствующих загрузок на органах управления.
Унифицированный процедурный тренажер летного и технического персонала летательного аппарата позволяет:
- изучить интерьер кабины летательного аппарата;
- изучить расположение и работу с органами управления и индикации;
- отработать процедуры, связанные с подготовкой оборудования летательного аппарата к эксплуатации: контрольные операции и работы по регламенту обслуживания;
- изучить эксплуатацию систем в штатных и нештатных ситуациях;
- изучить поиск и устранение отказов и неисправностей;
- изучить оборудование реального летательного аппарата;
- использовать электронную документацию;
- осуществить включение в контур управления блоков и систем, расположенных вне кабины пилота летательного аппарата;
- имитировать различные нештатные ситуации в процессе работы с внешними условиями и отказом оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| ИНТЕРАКТИВНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБУЧЕНИЯ | 2004 |
|
RU2271040C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| Интегральная система дистанционного обучения пилотированию летательных аппаратов, комплексных испытаний и видеоконференцсвязи | 2018 |
|
RU2703325C1 |
| КОМПЛЕКСНАЯ ОБУЧАЮЩАЯ СИСТЕМА ДЛЯ АВИАЦИОННЫХ СПЕЦИАЛИСТОВ | 2002 |
|
RU2267163C2 |
| Комплексная система дистанционного обучения пилотированию летательных аппаратов | 2016 |
|
RU2647345C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ДИНАМИКИ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА И МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2484535C1 |
| ТРЕНАЖЕР РАСЧЕТА ПОДВИЖНОГО НАЗЕМНОГО РАКЕТНОГО КОМПЛЕКСА | 2020 |
|
RU2730274C1 |
| Стенд подготовки пилотов летательных аппаратов | 2017 |
|
RU2674548C1 |
| ПРОЦЕДУРНЫЙ ТРЕНАЖЕР С СИСТЕМОЙ ИНЖЕНЕРНОЙ ПОДДЕРЖКИ ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ ВОЗДУШНЫХ СУДОВ | 2016 |
|
RU2624890C1 |

Изобретение относится к средствам имитационной техники для профессиональной подготовки летного состава. Технический результат - расширение функциональных возможностей. Для достижения данного результата кабина летательного аппарата в унифицированном тренажере летного и технического персонала выполнена в виде макета кабины с интерьером, соответствующим реальной кабине летательного аппарата. При этом кабина выполнена из конструктивных блоков, содержащих органы управления, контроля и индикации, размещенных в местах и в последовательности, соответствующих их размещению в реальной кабине летательного аппарата. Модуль вычислительной управляющей системы выполнен в виде распределенной вычислительной системы, состоящей из n+1 системных блоков персональных компьютеров, блока связи, блока имитации систем и оборудования и блока сетевого распределителя, и снабжен, по крайней мере, одним программным блоком, обеспечивающим подготовку технического и летного персонала для выполнения процедур по контролю и подготовке систем и оборудования летательного аппарата перед выполнением полетного задания. Процедурный тренажер снабжен микроконтроллерной системой, выполненной в виде системы распределенных контроллеров и имеющей головной контроллер, размещенных в конструктивных блоках макета кабины летательного аппарата. Причем микроконтроллеры конструктивных блоков макета кабины летательного аппарата объединены локальной вычислительной сетью, управляемой головным контроллером, подключенным к вычислительной управляющей системе и осуществляющим связь между вычислительной управляющей системой и микроконтроллерной системой. 8 з.п. ф-лы, 2 ил.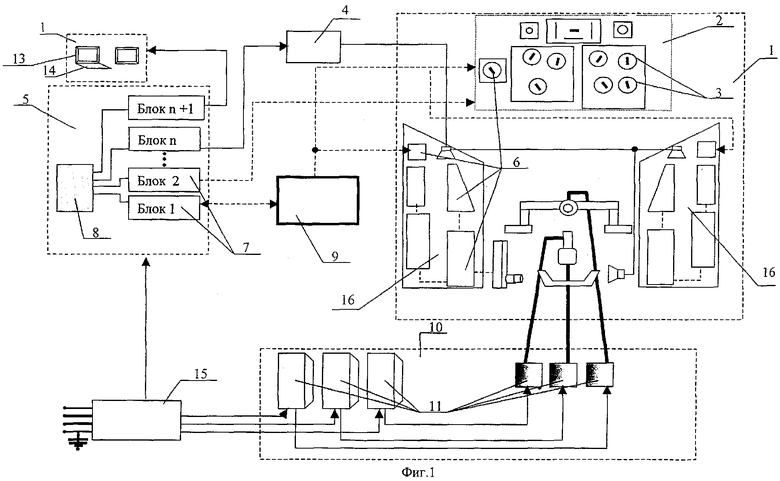
| US 6319008 B1, 20.11.2001 | |||
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| US 5260874 А, 09.11.1993 | |||
| DE 19703736 А1, 06.11.1997 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭКОЛОГИЧЕСКОЙ БЕЗОПАСНОСТИ ПРИБОРОВ ДЛЯ СМАЗОЧНО-ЗАПРАВОЧНЫХ ОПЕРАЦИЙ | 2020 |
|
RU2731069C1 |

