Изобретение относится к способам и средствам, использующим методы дифференциально-фазовой профилометрии/профилографии и оптической рефрактометрии, и может быть использовано практически во всех отраслях промышленности, например, в автомобильной, авиационной, авиакосмической, химической, электронной, оптической и медицинской промышленности, в машиностроении при изготовлении различных деталей, агрегатов и машин, высокоэффективных турбосистем, в приборостроении, особенно в производстве подшипников, а также для определения эксплуатационных параметров топливно-смазочных материалов, например, для экспресс-анализа с целью определения количества и размеров частиц в маслах, топливе и нефтепродуктах, в прозрачных веществах и биологических средах.
Известен способ исследования рельефных и фазовых объектов, позволяющий сформировать изображение объекта путем сравнения фаз световых пучков, отраженных от его поверхности в двух точках, разнесенных на диаметр светового пятна, преобразования полученной разности фаз в электрический сигнал с фазовой демодуляцией и модуляции электрическим сигналом соответствующей точки изображения, причем с целью уменьшения времени получения изображения световой пучок разделяют на два параксиальных пучка, каждый из которых одновременно сдвигают по частоте с различными значениями сдвига, синхронно развертывают их по поверхности объекта и оптически смешивают два отраженных от поверхности луча [Патент Украины №19905, опубликован 25.12.1997].
Для реализации этого способа используют лазерный сканирующий микроскоп, содержащий источник лазерного излучения, светоделитель, акустооптическую ячейку, генераторы электрических сигналов, устройство развертки луча, объектив, фотоприемник и последовательно соединенные смеситель, фазовый детектор и видеоконтрольное устройство, в котором акустооптическая ячейка, устройство развертки луча, светоделитель и объектив последовательно установлены по ходу лазерного луча, выходы генераторов электрических сигналов подключены к входу акустооптической ячейки и к смесителю, устройство развертки луча содержит блок управления, последовательно расположенные по ходу луча телескопическую оптическую систему, расположенные во взаимно перпендикулярных плоскостях два акустооптических дефлектора и цилиндрическую линзу, причем два акустооптических дефлектора присоединены к блоку управления, а фотоприемник, расположенный вдоль оси отраженного от светоделителя луча, соединен с входом фазового детектора.
Недостатком известного способа является его крайне низкая эффективность, обусловленная тем, что разделение светового пучка возможно только по одной оси в направлении сканирования пучка, в связи с чем данные о параметрах исследуемой поверхности можно получить только вдоль одного конкретного направления (оси ОХ или оси OY).
Известен также способ измерения рельефа исследуемой поверхности путем сравнения его с известным рельефом образца [Патент США №5481360 А, опубликован 02.01.1996].
Для реализации этого способа используют оптическое устройство, содержащее источник лазерного излучения; акустооптический элемент; средство для приведения в действие акустооптического элемента для трансформации падающего лазерного луча, по меньшей мере, на два луча с разными частотами; два светоделителя, первый из которых размещен между акустооптическим элементом и образцом на оптической оси, по меньшей мере, двух направленных к поверхности образца лазерных лучей и используется для их разделения и для разделения отраженного от образца света, на первый и второй разделенные лучи света, а второй используется для отражения второго разделения луча, отраженного от первого светоделителя; три фотоприемника, первый из которых в отношении формирования опорного сигнала биения реагирует, по меньшей мере, на два лазерных луча, которые разделены первым светоделителем, второй в отношении формирования сигнала биения реагирует на первое отражение разделенного луча, а третий предназначен для детектирования интенсивности света части второго отражения разделенного луча света в отношении формирования светового сигнала; соединенный с первым и вторым фотоприемниками фазовый компаратор как средство сравнения интенсивностей и фаз сигнала биения от исследуемой поверхности и опорного сигнала биения от образца, а также вычислительные приборы для расчета параметров рельефа исследуемой поверхности.
Недостатками этого способа являются необходимость сравнения данных о параметрах исследуемой поверхности с данными о параметрах поверхности эталонного образца, имеющей свои неровности, а также то, что разделение светового пучка возможно только в направлении сканирования пучка, в связи с чем данные о параметрах исследуемой поверхности в плоскости сканирования можно получить только вдоль одной оси (оси ОХ или оси OY). В результате получают профилограмму (разрез рельефа исследуемой поверхности) или набор профилограмм. Для сшивания полученных профилограмм с целью воссоздания рельефа исследуемой поверхности необходима дополнительная информация о начале отсчета в каждой профилограмме, которая при таком способе исследования не измеряется. В то же время для воссоздания рельефа исследуемой поверхности необходимо иметь данные о параметрах исследуемой поверхности в плоскости сканирования вдоль обеих осей (оси ОХ и оси OY), что выдвигает достаточно жесткие требования к оптической схеме устройства - реализация такой возможности в устройствах дифференциально-фазовой профилометрии и/или профилографии требует обеспечения в отношении распространения световых пучков вдоль обеих осей (оси ОХ и оси OY) одинаковых условий. Кроме этого, оптическая схема известного устройства имеет опорный канал, который требует отдельной юстировки, и вносит в измеряемые величины дополнительные погрешности.
Известно устройство измерения рефракционных аберраций глаза, включающий канал зондирования, измерительный канал и канал нормирования, причем канал зондирования состоит из последовательно установленных: лазера, первого и второго дифракционных однокоординатных дефлекторов, селектора первого порядка дифракции и коллимационной линзы, причем селектор первого порядка дифракции выполнен в виде телескопа по схеме Кеплера с апертурной диафрагмой, установленной в точке совпадения фокусов входной и выходной линз, точка переднего фокуса коллимационной линзы расположена в плоскости выходного зрачка телескопа, каждый однокоординатный дефлектор имеет в своем составе акустооптический кристалл, управляемый цифровым синтезатором частот через выходной усилитель-драйвер после коллимационной линзы перед глазом пациента установлены поляризационный разделитель, ортогональный выход которого сориентирован на измерительный канал, а измерительный канал состоит из объектива, позиционно чувствительного фотоприемника, установленного в его фокальной плоскости и своим выходом соединенного с блоком обработки и отображения информации на основе компьютера, соединенного управляющими связями с лазером, дефлекторами и каналом нормирования, между акустооптическими кристаллами однокоординатных дефлекторов установлен телескоп переноса эквивалентного центра отклонения лучей первым дефлектором в эквивалентный центр отклонения лучей вторым дефлектором так, что входной зрачок телескопа переноса совмещен с эквивалентным центром отклонения лучей акустооптическим кристаллом первого дефлектора, а выходной зрачок телескопа переноса и входной зрачок селектора первого порядка дифракции совмещен с эквивалентным центром отклонения лучей акустооптическим кристаллом второго дефлектора, телескоп переноса выполнен в виде схемы Кеплера и в него введена апертурная диафрагма, установленная в точке совпадения фокуса входной линзы и переднего фокуса выходного зрачка линзы телескопа переноса, апертурная диафрагма телескопа переноса выполнена в виде щели, своей более длинной стороной ориентированной вдоль направления отклонения лучей первым дефлектором, телескоп переноса выполнен из цилиндрических линз, меридиональная ось которых ориентирована вдоль направления отклонения лучей первым дефлектором, в телескопе переноса и в селекторе первого порядка дифракции вокруг апертурных диафрагм вне зоны первого порядка дифракции обоих направлений отклонения световых лучей установлены световые ловушки, например, в виде поглощающих поверхностей, которые сходятся под острым углом [Патент Украины №66936 Устройство для измерения рефракционных аберраций глаза (Пристрiй для вимiрювания рефракцiйных аберацiй ока), А61В 3/00, А61В 3/10, А61В 3/14, 15.06.2004].
Недостатками известного устройства является то, что для проведения измерений в данном устройстве применяется более сложный позиционно-чувствительный фотоприемник, имеющий несколько выходящих информационных сигналов, которые требуют дополнительной обработки и соответственно более сложной схемы электронного блока. Кроме того, позиционно-чувствительный фотоприемник имеет линейную характеристику лишь в достаточно ограниченной области, размеры которой существенно зависят от формы и размеров фокального пятна на фотоприемники, которые трудно контролировать. Указанные недостатки этого технического решения обусловливают меньший динамический диапазон и низкую точность измерений по сравнению с устройствами, реализующими дифференциально-фазовый метод.
Известен используемый в микробиологии и медицине лазерный сканирующий конфокальный микроскоп, включающий микроскоп с двумя серводвигателями постоянного тока, источник света в виде галогенной и ртутной лампы, и лазерный модуль. Лазерный блок сканирующего конфокального микроскопа содержит два движущихся независимо друг от друга гальванометрических сканера, четыре лазера (аргоновый, два гелиево-неоновых и диодный), генерирующих излучения разной длины волны (от 405 до 633 нм) и разной мощности (от 1 до 30 мВт). Микроскоп имеет набор объективов (от 1× до 40×), поле зрения 10×10 мм (при использовании объектива 1,25×), два конфокальных флуоресцентных канала [www.biochemistry.org.ua/index.php/uklactivities/services.html].
Недостатками известного сканирующего конфокального микроскопа является необходимость применения при биологических и медицинских исследованиях контрастных флуоресцентных веществ, действия которых могут привести к повреждению живых клеток при превышении нужной концентрации красителя, и выжигания фотохимического красителя, и, как следствие, требует повторного внесения красителя в объект исследования. Кроме того, такой микроскоп содержит подвижные элементы - гальванометрические сканеры, что требует дополнительной сложной юстировки, увеличивает погрешности измерений и, соответственно, уменьшает надежность прибора и достоверность полученных результатов.
Наиболее близким техническим решением, которое выбрано в качестве прототипа, является способ дифференциально-фазовой профилометрии и/или профилографии, который заключается в том, что предварительно световым пучком сканируют эталонную поверхность, а затем по тем же траекториям сканируют исследуемую поверхность; причем, каждую точку как исследуемой, так и эталонной поверхности последовательно сканируют, по меньшей мере, первым и вторым световым пучком, причем указанные световые пучки разделяют на, по меньшей мере, два параксиальных луча, по меньшей мере, один из которых сдвигают относительно других по частоте и в пространстве вдоль первой оси в первом световом пучке и вдоль ортогональной ей второй оси во втором световом пучке, при этом измеряют разность фаз отраженных лучей для выбранного количества точек сканируемой поверхности, аппроксимируют данные о разности фаз отраженных лучей, полученные при сканировании эталонной поверхности, двумерной функцией, затем корректируют данные о разности фаз отраженных лучей, полученные при сканировании эталонной поверхности, на основе указанных аппроксимированных данных и осуществляют двумерное интегрирование скорректированных данных, полученных при сканировании эталонной поверхности, вдоль траекторий перемещения световых пучков и аппроксимируют указанные проинтегрированные данные двумерной функцией, затем корректируют данные о разности фаз отраженных лучей, полученные при сканировании исследуемой поверхности, на основе упомянутых аппроксимированных данных о разности фаз отраженных лучей в соответствующих точках эталонной поверхности и осуществляют двумерное интегрирование скорректированных данных, полученных при сканировании исследуемой поверхности, вдоль траекторий перемещения световых пучков, корректируют указанные проинтегрированные данные на основе упомянутых проинтегрированных и аппроксимированных данных о разности фаз отраженных лучей в соответствующих точках эталонной поверхности, после чего строят изображение и/или определяют параметры профиля исследуемой поверхности. Причем сканирование осуществляют путем перемещения светового пучка от одной точки поверхности к другой параллельно оптической оси по траекториям в виде эквидистантных линий, которые начинаются и заканчиваются на границе заданной области исследуемой поверхности, причем при сканировании предварительно осуществляют перемещение светового пучка через исследуемые точки заданной области сканируемой поверхности по эквидистантным траекториям в направлении первой оси, а затем осуществляют перемещение светового пучка через упомянутые точки заданной области сканируемой поверхности по эквидистантным траекториям в направлении второй оси, ортогональной первой, перемещения светового пучка через исследуемые точки заданной области сканируемой поверхности осуществляют путем последовательного перемещения светового пучка через каждое множество точек указанной области, образованное точками, лежащими между ее границами на одной из траекторий, ориентированных в направлении первой оси, и на одной из траекторий, ориентированных в направлении ортогональной ей второй оси, по меньшей мере, один из лучей светового пучка сдвигают в пространстве вдоль оси перемещения лучей и один из лучей светового пучка сдвигают в пространстве вдоль оси, ортогональной осе перемещения лучей, а аппроксимацию осуществляют двумерным полиномом [Патент Российской Федерации на изобретение №2179328, опубликован 19.06.2001].
Для реализации этого способа используют устройство для дифференциально-фазовой профилометрии и/или профилографии, содержащее источник излучения, в качестве которого может быть использован лазер; установленные по ходу светового пучка, по меньшей мере, два акустооптических дефлектора, светоделитель и объектив, при этом каждый из акустооптических дефлекторов выполнен с возможностью отклонения, сканирования, а также разделения, по меньшей мере, части светового пучка, по меньшей мере, на два луча по частоте и в пространстве по одной из координат, в то же время указанные акустооптические дефлекторы расположены с возможностью отклонения, сканирования и разделения, по меньшей мере, части светового пучка, по меньшей мере, по двум ортогональным направлениям, устройство также содержит, по меньшей мере, два генератора управляющих сигналов для каждого акустооптического дефлектора с общим генератором опорной частоты для всех генераторов управляющих сигналов каждого акустооптического дефлектора, при этом выходы генераторов управляющих сигналов соединены с входом соответствующего акустооптического дефлектора через сумматор, устройство также содержит фотоприемники опорного и измерительного сигналов и фазовый детектор, причем светоделитель выполнен с возможностью направления части светового пучка от источника света на фотоприемник опорного сигнала и части отраженного светового пучка на фотоприемник измерительного сигнала, вход фазового детектора соединен с выходами указанных фотоприемников, а выход - с блоком обработки данных, включающем первый модуль аппроксимации, который выполнен с возможностью аппроксимации данных о разнице фаз отраженных лучей светового пучка в исследуемых точках эталонной поверхности, третий модуль сравнения для корректировки данных о разнице фаз отраженных лучей в исследуемых точках эталонной поверхности на основе указанных аппроксимированных данных, первый модуль интегрирования для интегрирования скорректированных данных о разнице фаз отраженных лучей в исследуемых точках эталонной поверхности вдоль траекторий перемещения светового пучка, который соединен со вторым модулем аппроксимации для аппроксимации указанных проинтегрированных данных; блок обработки данных также содержит первый модуль сравнения для корректировки данных о разнице фаз отраженных лучей светового пучка в соответствующих точках исследуемой поверхности на основе данных о разнице фаз отраженных лучей светового пучка в соответствующих точках эталонной поверхности, второй модуль интегрирования, который выполнен с возможностью интегрирования данных о разнице фаз отраженных лучей светового пучка в исследуемых точках исследуемой поверхности вдоль траекторий перемещения светового пучка, второй модуль сравнения для корректировки упомянутых проинтегрированных данных о разнице фаз отраженных лучей светового пучка для исследуемой поверхности на основе упомянутых данных, полученных в результате аппроксимации проинтегрированных данных о разнице фаз отраженных лучей светового пучка в соответствующих точках эталонной поверхности, кроме того блок обработки данных содержит модуль отображения информации и модуль управления разверткой, который соединен с упомянутыми генераторами управляющих сигналов. При этом фазовый детектор через аналого-цифровой преобразователь, модуль подавления шума и узел выбора режима работы соединен с входом третьего модуля сравнения, первого модуля запоминания и первого модуля аппроксимации, выход которого соединен с входом второго модуля запоминания, выход второго модуля запоминания соединен со вторым входом упомянутого третьего модуля сравнения, выход которого соединен со входом первого модуля интегрирования, а выход первого модуля интегрирования соединен с входом второго модуля аппроксимации, выход которого соединен с входом третьего модуля запоминания, выходы первого и второго модулей запоминания соединены со входами первого модуля сравнения, выход которого соединен с первым входом второго модуля интегрирования, а второй вход второго модуля интегрирования соединен через модуль коррекции с выходом упомянутого первого модуля запоминания, второй модуль интегрирования и третий модуль запоминания соединены с входами второго модуля сравнения, выход которого соединен с первым входом модуля калибрования, а второй вход модуля калибрования соединен со вторым выходом второго модуля интегрирования, выход модуля калибровки соединен с узлом расчета параметров поверхности, соединенным с первым входом модуля отображения информации, со вторым входом которого соединен один из выходов узла выбора режима работы, а с третьим входом соединен модуль управления разверткой, выполненный с возможностью задания направления разделения светового пучка и формирования последовательности координат позиционирования светового пучка на заданной области исследуемой поверхности, со входом модуля управления разверткой соединен модуль установки пределов области исследуемой поверхности, вход которого соединен с упомянутым модулем отображения информации. Кроме этого, между источником света и акустооптическими дефлекторами по ходу светового пучка установлена первая оптическая система, которая выполнена с возможностью расширения светового пучка, а после акустооптических дефлекторов установлена вторая оптическая система, которая выполнена с возможностью сужения светового пучка.
Недостатками взятого в качестве прототипа технического решения, являются необходимость сравнения данных о параметрах исследуемой поверхности с данными о параметрах эталонной поверхности, которая имеет свои неровности. Погрешности при определении параметров рельефа поверхности эталонного образца приводят к дополнительным погрешностям в измерении и обработке данных, касающихся параметров рельефа исследуемой поверхности. В то же время принципиальная функциональная схема известного устройства, включающая двухканальную схему определения данных, касающихся параметров рельефа исследуемой поверхности и схему блока обработки полученных данных слишком сложна. Отдельный фотоприемник для выделения опорного сигнала из сигналов, полученных от эталонного образца, вносит в результаты измерений дополнительные погрешности. Известное устройство работает в режиме «на отражение», его нельзя использовать для определения параметров (показателя преломления, распределения плотности) прозрачных объектов, т.е. для работы в режиме «на просвет».
Таким образом, задача, на решение которой направлено заявляемое изобретение, заключается в обеспечении возможности исследования как непрозрачных, так и прозрачных объектов, непосредственного (без использования эталонных образцов и контрастных веществ) измерения параметров (высоты и локальных наклонов поверхности, показателя преломления, распределения плотности) исследуемого объекта, а также возможности воссоздания изображения рельефа его поверхности и (или) построения «карты рефракции» (распределения плотности), и одновременно в усовершенствовании известного устройства для дифференциально-фазовой профилометрии/профилографии путем исключения из схемы известного устройства фотоприемника, предназначенного для выделения опорного сигнала из сигналов, полученных от эталонного образца и, соответственно, замены двухканальной принципиальной функциональной схемы на одноканальную.
Технический результат, который достигается в результате реализации заявляемого изобретения, заключается в том, что благодаря непосредственному измерению параметров исследуемого объекта уменьшается время обработки полученных данных с одновременным повышением точности и достоверности полученных результатов; усовершенствуется принципиальная функциональная схема известного устройства (включая как оптическую, так и электронную части) путем создания схемно-технических и конструктивных решений двух вариантов устройства для реализации заявленного способа, работающих в как в режиме «на отражение», так и в режиме «на просвет».
Суть заявляемого способа определения параметров объекта, который позволяет достичь указанного выше технического результата, заключается в следующем:
- исследуемый объект сканируют по двум взаимно ортогональным направлениям с совмещением центров сканирования двумя световыми пучками, которые формируют путем предварительного поочередного разделения светового пучка в каждом из двух акустооптических дефлекторов на, по меньшей мере, два световых пучка, со сдвигом по частоте и в пространстве вдоль первой оси в первом акустооптическом дефлекторе и вдоль ортогональной ей второй оси во втором акустооптическом дефлекторе, притом что сканирование осуществляют путем перемещения световых пучков через каждую точку множества точек исследуемого объекта, находящихся в границах выбранной для исследования области, сначала по одной из траекторий, ориентированной в направлении первой оси, двумя световыми пучками, которые разделены в плоскости первой оси, а затем - по одной из траекторий, ориентированной в направлении второй оси, которая ортогональна первой, двумя световыми пучками, которые разделены в плоскости второй оси, после чего отраженные от поверхности исследуемого объекта (или прошедшие сквозь него) световые пучки направляют на фотоприемник, где их трансформируют в электрические сигналы, обрабатывают полученные сигналы, измеряют параметры исследуемого объекта и строят изображение рельефа поверхности исследуемого объекта или его «карту рефракции» (распределения плотности);
- параметры исследуемого объекта определяют путем измерения фазы переменной составляющей фототока с частотой Δf, равной разности между частотными параметрами каждого из пары сканирующих световых пучков, при этом параметры каждой отдельной точки исследуемого объекта измеряют дважды, в начале следующего и в конце предыдущего такта сканирования, что повышает точность и достоверность результатов измерения;
- измерение параметров исследуемого объекта благодаря постоянной разностиΔfмежду частотными параметрами каждого разделенного и отраженного от поверхности исследуемого объекта (или прошедшего сквозь него) светового пучка осуществляют по одноканальной схеме, что значительно упрощает как оптическую, так и электронную часть устройства для реализации заявленного способа.
Новым в заявляемом способе является возможность непосредственного (без использования эталонных образцов и контрастных материалов) измерения параметров исследуемого объекта путем измерения разности фаз между двумя разнесенными по частоте и в пространстве, отраженными от поверхности исследуемого объекта (или прошедшими сквозь него) световыми пучками, что позволяет уменьшить время измерения, упростить обработку полученных в результате сканирования данных и повысить точность и достоверность результатов измерения.
Возможность осуществления заявленного способа поясняется следующими графическими материалами:
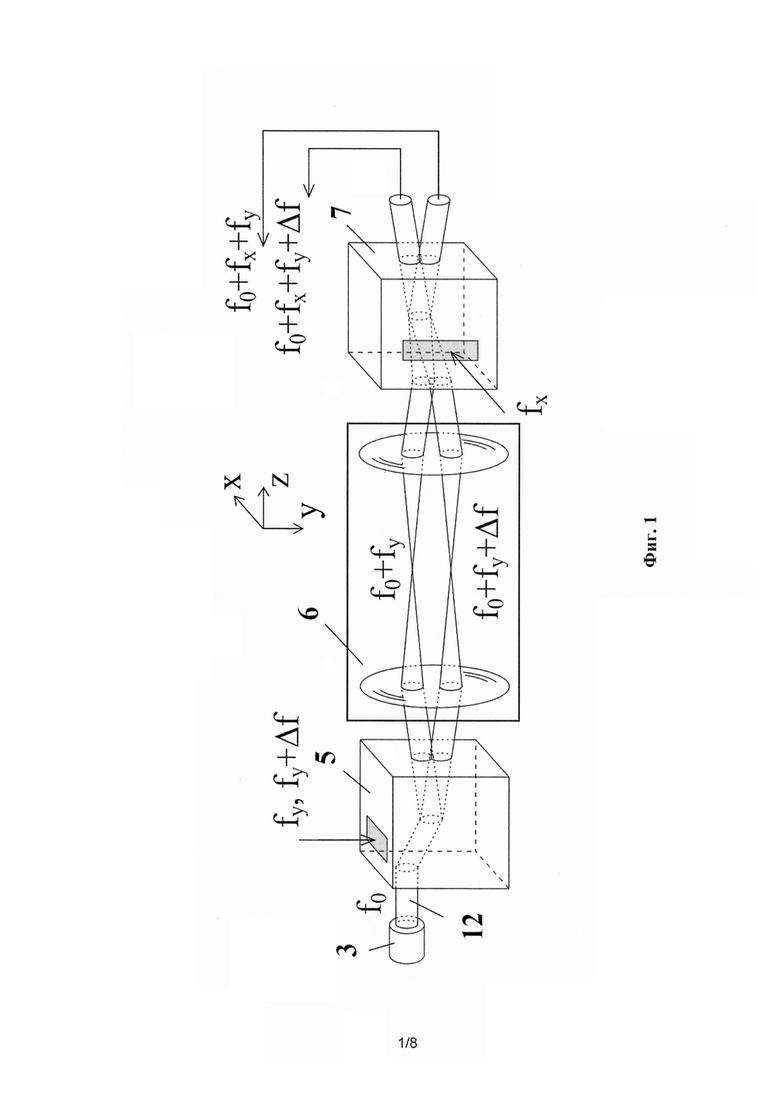
Фиг. 1 - схема первого этапа разделения светового пучка и совмещения центров сканирования;
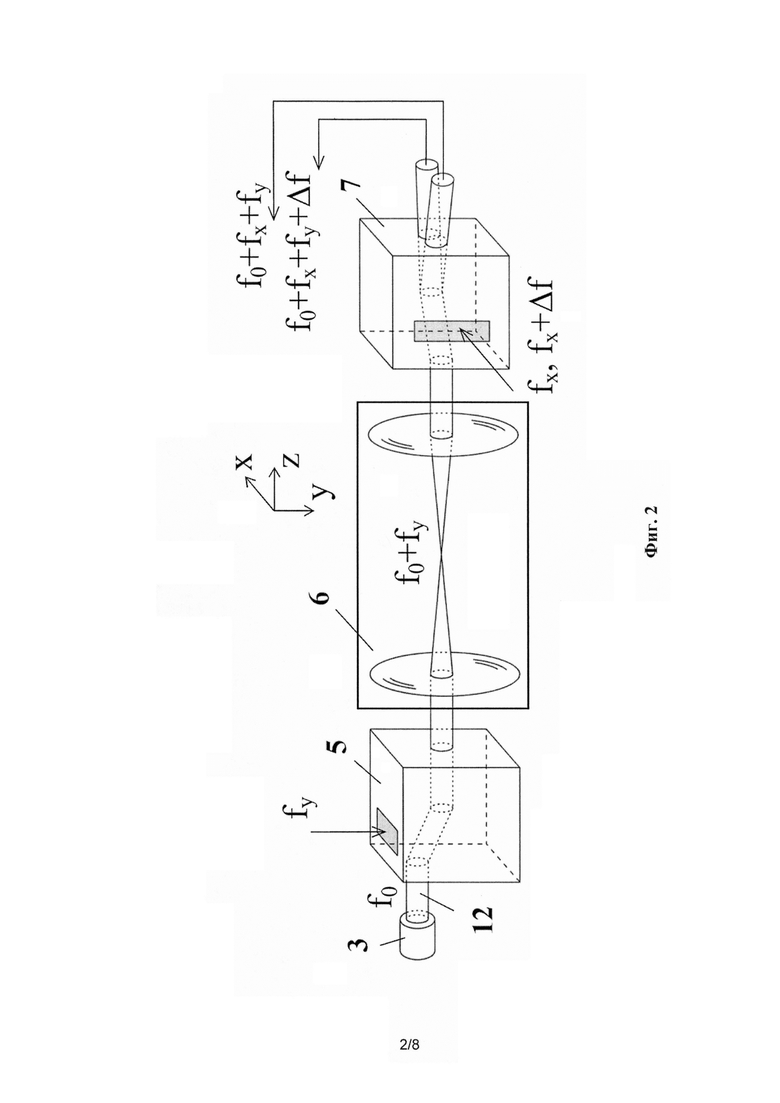
Фиг. 2 - схема второго этапа разделения светового пучка и совмещения центров сканирования;
Заявляемый способ определения параметров исследуемого объекта (или его поверхности) реализуется следующим образом.
В качестве примера, рассматривается вариант исследования объекта поочередным сканированием его вдоль оси OY с разделением светового пучка в направлении оси OY и вдоль оси ОХ с разделением светового пучка в направлении оси ОХ.
Формирование световых пучков происходит в два этапа согласно представленным на Фиг. 1 и Фиг. 2 схемам, где отмечены частотные параметры сканирующих световых пучков:
fO - частота оптического сигнала,
fX - частота управляющего сигнала, который обеспечивает сканирование по оси ОХ,
fY - частота управляющего сигнала, который обеспечивает сканирование по оси OY,
Δf - разность частот управляющих сигналов, обеспечивающих сканирование (дополнительный сдвиг по частоте одного из сканирующих лучей).
На первом этапе (Фиг. 1) сигнал с составляющими, которые имеют частоты fY, fY+Δf, подают на первый акустооптический дефлектор 5, который расщепляет световой пучок 12 на два пучка и отклоняет их вдоль оси OY. С помощью телескопической системы 6 Бадаля центр расщепления и сканирования световых пучков переносят на второй акустооптический дефлектор 7, на который подают сигнал с частотой fX - Второй акустооптический дефлектор 7 отклоняет полученные световые пучки вдоль оси ОХ. Это обеспечивает измерение разности фаз между двумя световыми пучками, которые были разделены, в направлении оси OY.
На втором этапе (Фиг. 2) сигнал с частотой fY подают на акустооптический дефлектор 5, который отклоняет полученный световой пучок вдоль оси OY. С помощью телескопической системы 6 Бадаля центр сканирования отклоненного светового пучка переносят на второй акустооптический дефлектор 7, на который подают сигнал с составляющими, имеющими частоты fX, fx+Δf. Второй акустооптический дефлектор 7 разделяет полученный световой пучок на два пучка и отклоняет их вдоль оси ОХ. Это обеспечивает измерение разности фаз между двумя световыми пучками, которые расщеплены в направлении оси ОХ.
Управление последовательностью подачи сигналов на первый 5 и второй 7 акустооптические дефлекторы с необходимыми частотами в отношении разделения световых пучков, их сдвига и сканирования осуществляют в автоматическом режиме. В то же время частоты fX и fY обеспечивают сканирование в заданных направлениях и в заданных границах. Таким образом, для расчетов параметров исследуемого объекта на фазовый детектор устройства для реализации заявляемого способа поступают два сигнала, которые соответствуют параметрам, характеризующим распределение показателей преломления (плотности) в исследуемом объекте или высоту и локальные наклоны рельефа его поверхности. Отсутствие необходимости использовать эталонные образцы с соответствующими расчетами их параметров, а также измерение параметров исследуемого объекта в каждой выбранной для исследования точке дважды (в начале и в конце каждого цикла сканирования) значительно упрощает и ускоряет обработку полученных в результате измерений данных, а также повышает их точность и достоверность.
Для реализации заявляемого способа определения параметров объекта разработаны два варианта устройства, которые работают в режиме «на отражение» и в режиме «на просвет».
Вариант 1. Устройство для определения параметров объекта (далее - Устройство 1), обеспечивающее измерение параметров (высоты и локальных наклонов) рельефа поверхности исследуемого объекта, представляет собой устройство дифференциально-фазовой профилометрии/профилографии, которое состоит из источника излучения, в качестве которого может быть использован лазер, установленные по ходу светового пучка и соединенные между собой последовательно и механически на общей оптической оси, первой оптической системы, выполненной с возможностью расширения светового пучка, по меньшей мере, двух акустооптических дефлекторов, каждый из которых выполнен с возможностью разделения светового пучка, по меньшей мере, на два пучка, смещения их по частоте и в пространстве и сканирования выбранного участка исследуемого объекта по двум взаимно ортогональным направлениям, установленной между первым и вторым акустооптическими дефлекторами телескопической системы Бадаля, второй оптической системы, выполненной с возможностью сужения светового пучка, светоделителя, объектива и фотоприемника, четырех генераторов управляющих сигналов - по два для каждого акустооптического дефлектора, генератора опорных сигналов, фазового детектора, блока управления и обработки и видеомонитора.
Новым в Устройстве 1 является то, что оптическая ось, на которой расположены источник излучения, первый и второй акустооптические дефлекторы, первая и вторая оптические системы, светоделитель, объектив и фотоприемник, является ломаной. В состав устройства дополнительно введены телескопическая система Бадаля для переноса центра сканирования с первого на второй акустооптический дефлектор и видеомонитор для визуализации результатов измерений. Фазовый детектор дополнительно содержит частотный фильтр, ограничивающий полосу частот входящего сигнала, отраженного от исследуемой поверхности и содержащего переменную составляющую с частотой Δf, которая является главным носителем информации о параметрах рельефа исследуемой поверхности, усилитель-ограничитель, счетчик-синхронизатор и цифровой счетчик. Блок управления и обработки дополнительно содержит модуль реконструкции рельефа исследуемой поверхности, модуль выбора режимов отображения и модуль управления разверткой. Выход фотоприемника соединен с входом фазового детектора, который одновременно является входом частотного фильтра, выход которого соединен с входом усилителя-ограничителя, а выход усилителя-ограничителя соединен с первым входом цифрового счетчика. В то же время выход генератора опорных сигналов соединен с первыми входами генераторов управляющих сигналов, с входом счетчика-синхронизатора и с третьим входом цифрового счетчика, притом что выход счетчика-синхронизатора соединен со вторым входом цифрового счетчика, выход которого соединен с входом блока управления и обработки, который одновременно является входом модуля выбора режима работы, при этом выходы модуля выбора режима работы соединены с входами модуля реконструкции рельефа поверхности исследуемого объекта и модуля выбора режима отображения, а выход модуля рельефа поверхности исследуемого объекта соединен со вторым входом модуля выбора режима отображения, один из выходов которого соединен с входом дополнительно установленного видеомонитора, а второй - с входом модуля управления разверткой, первый выход которого, в свою очередь, соединен обратной связью с третьим входом модуля выбора режима отображения, притом что остальные четыре выхода модуля управления разверткой, которые одновременно являются выходами блока управления и обработки, соединены с входами генераторов управляющих сигналов, выходы которых через сумматоры соединены с входами первого и второго акустооптических дефлекторов.
Следовательно, поставленная задача решается тем, что в принципиальную схему известного устройства внесены такие изменения:
- оптическая ось Устройства 1 выполнена ломаной;
- в состав Устройства 1 дополнительно введена телескопическая система Бадаля;
- из состава Устройства 1 исключен фотоприемник опорного сигнала;
- в состав фазового детектора дополнительно введен частотный фильтр;
- из состава блока управления и обработки исключены модули установления границ исследования поверхности, подавления шумов, аппроксимации, интегрирования, запоминания, расчета параметров поверхности, а также аналого-цифровой преобразователь;
- в состав блока управления и обработки дополнительно введены модуль реконструкции рельефа поверхности, модуль выбора режима отображения и модуль управления разверткой;
- в состав Устройства 1 дополнительно введен видеомонитор.
Вариант 2. Устройство для определения параметров объекта (далее - Устройство 2), обеспечивающее измерение показателей преломления, плотности исследуемого объекта, представляет собой устройство для дифференциально-фазовой профилометри/профилографии, которое состоит из источника излучения, в качестве которого может быть использован лазер, установленные по ходу светового пучка и соединенные между собой последовательно и механически на общей оптической оси, первой оптической системы, выполненной с возможностью расширения светового пучка, по меньшей мере, двух акустооптических дефлекторов, каждый из которых выполнен с возможностью разделения светового пучка, по меньшей мере, на два пучка, смещения их по частоте и в пространстве и сканирования выбранного участка исследуемого объекта по двум взаимно ортогональным направлениям, установленной между первым и вторым акустооптическими дефлекторами телескопической системы Бадаля, второй оптической системы, выполненной с возможностью сужения светового пучка, двух объективов, установленных до и после исследуемого объекта, и фотоприемника, четырех генераторов управляющих сигналов - по два для каждого акустооптического дефлектора, генератора опорных сигналов, фазового детектора, блока управления и обработки и видеомонитора.
Новым в Устройстве 2 является то, что оптическая ось, на которой установлены источник излучения, первый и второй акустооптические дефлекторы, первая и вторая оптические системы, оба объектива и фотоприемник, является ломаной. В состав устройства дополнительно введены телескопическая система Бадаля для переноса центра сканирования с первого на второй акустооптический дефлектор и видеомонитор для визуализации результатов измерений. Из состава устройства изъят светоделитель и за исследуемым объектом дополнительно установлен второй объектив для фокусировки на фотоприемник световых пучков, прошедших сквозь исследуемый объект. Фазовый детектор дополнительно содержит частотный фильтр, ограничивающий полосу частот входящего сигнала, прошедшего через исследуемый объект и содержащего переменную составляющую с частотой Δf, которая является главным носителем информации о параметрах исследуемого объекта, усилитель-ограничитель, счетчик-синхронизатор и цифровой счетчик. Блок управления и обработки дополнительно содержит модуль создания «карты рефракции» (распределения плотности) исследуемого объекта и модуль выбора режимов отображения. Выход фотоприемника соединен с входом фазового детектора, который одновременно является входом частотного фильтра, выход которого соединен с входом усилителя-ограничителя, а выход усилителя-ограничителя соединен с первым входом цифрового счетчика. В то же время выход генератора опорных сигналов соединен с первыми входами генераторов управляющих сигналов, с входом счетчика-синхронизатора и с третьим входом цифрового счетчика, притом что выход счетчика-синхронизатора соединен со вторым входом цифрового счетчика, выход которого соединен с входом блока управления и обработки, который одновременно является входом модуля выбора режима работы, при этом выходы модуля выбора режима работы соединены с входами модуля создания «карты рефракции» (распределения плотности) исследуемого объекта и модуля выбора режима отображения, а выход модуля создания «карты рефракции» (распределения плотности) исследуемого объекта соединен со вторым входом модуля выбора режима отображения, один из выходов которого соединен с входом дополнительно установленного видеомонитора, а второй - с входом модуля управления разверткой, первый выход которого, в свою очередь, соединен обратной связью с третьим входом модуля выбора режима отображения, притом что остальные четыре выхода модуля управления разверткой, которые одновременно являются выходами блока управления и обработки, соединены с входами генераторов управляющих сигналов, выходы которых через сумматоры соединены со входами первого и второго акустооптических дефлекторов.
Следовательно, поставленная задача решается тем, что в принципиальную схему известного устройства внесены следующие изменения:
- оптическая ось Устройства 2 выполнена ломаной;
- в состав Устройства 2 введена телескопическая система Бадаля;
- из состава Устройства 2 исключен фотоприемник опорного сигнала и светоделитель;
- в состав Устройства 2 дополнительно введен второй объектив;
- в состав фазового детектора дополнительно введен частотный фильтр;
- из состава блока управления и обработки исключены модули установки пределов поверхности исследования, фильтрации шума, аппроксимации, интегрирования, запоминания, расчета параметров поверхности, а также аналого-цифровой преобразователь;
- в состав блока управления и обработки дополнительно введены модуль создания «карты рефракции» (распределения плотности) исследуемого объекта, модуль выбора режима отображения и модуль управления разверткой;
- в состав Устройства 2 дополнительно введен видеомонитор.
Устройство 1 и Устройство 2 могут быть проиллюстрированы детальным описанием их конструкции и работы согласно следующим графическим материалам, где:
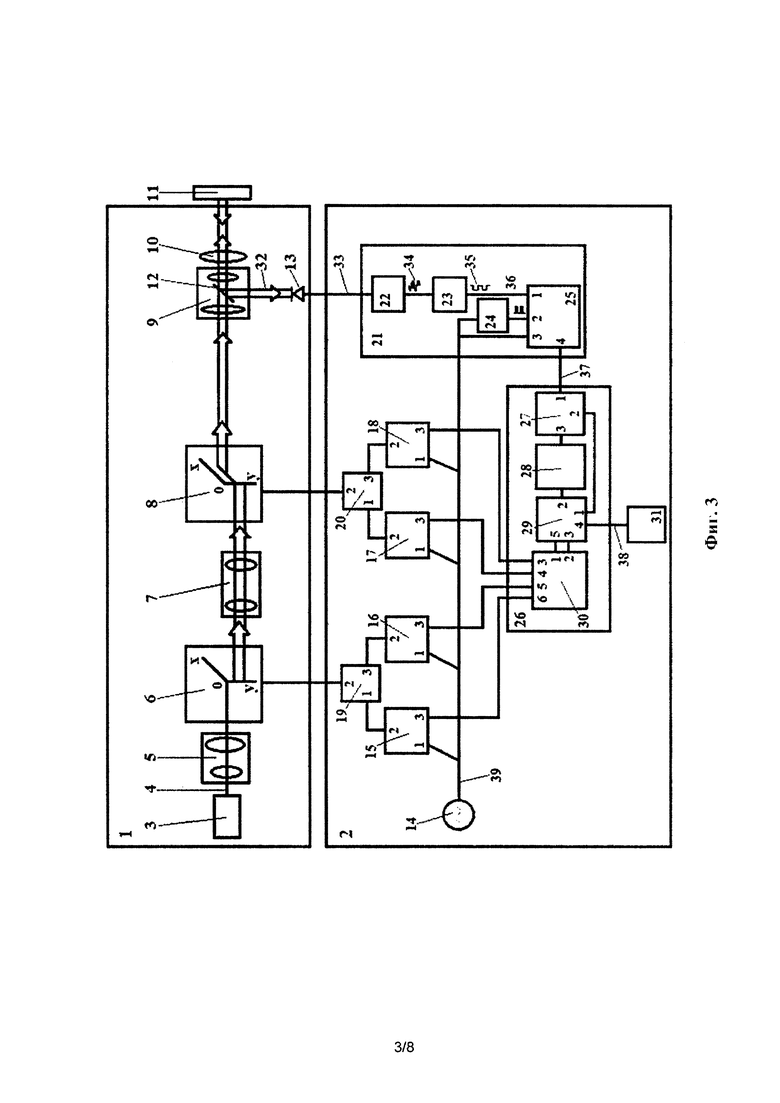
Фиг. 3 - принципиальная функциональная схема Устройства 1;
Фиг. 4 - пример использования Устройства 1 в машиностроении;
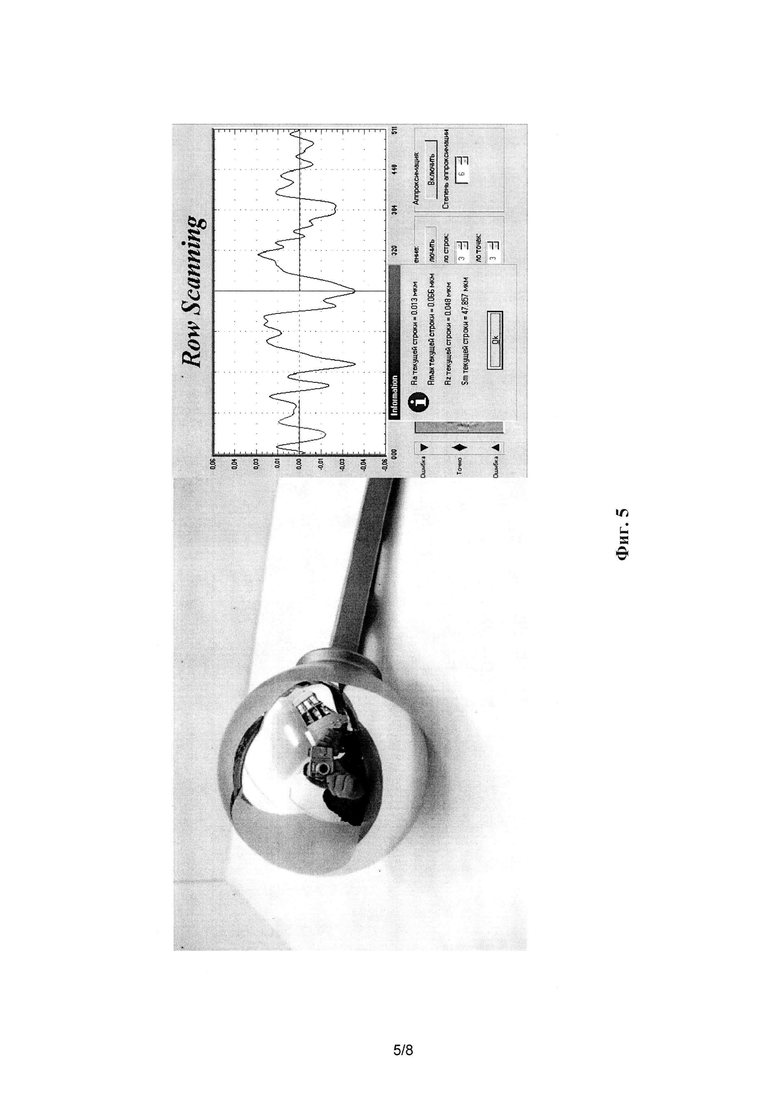
Фиг. 5 - внешний вид Устройства 1 в медицине.
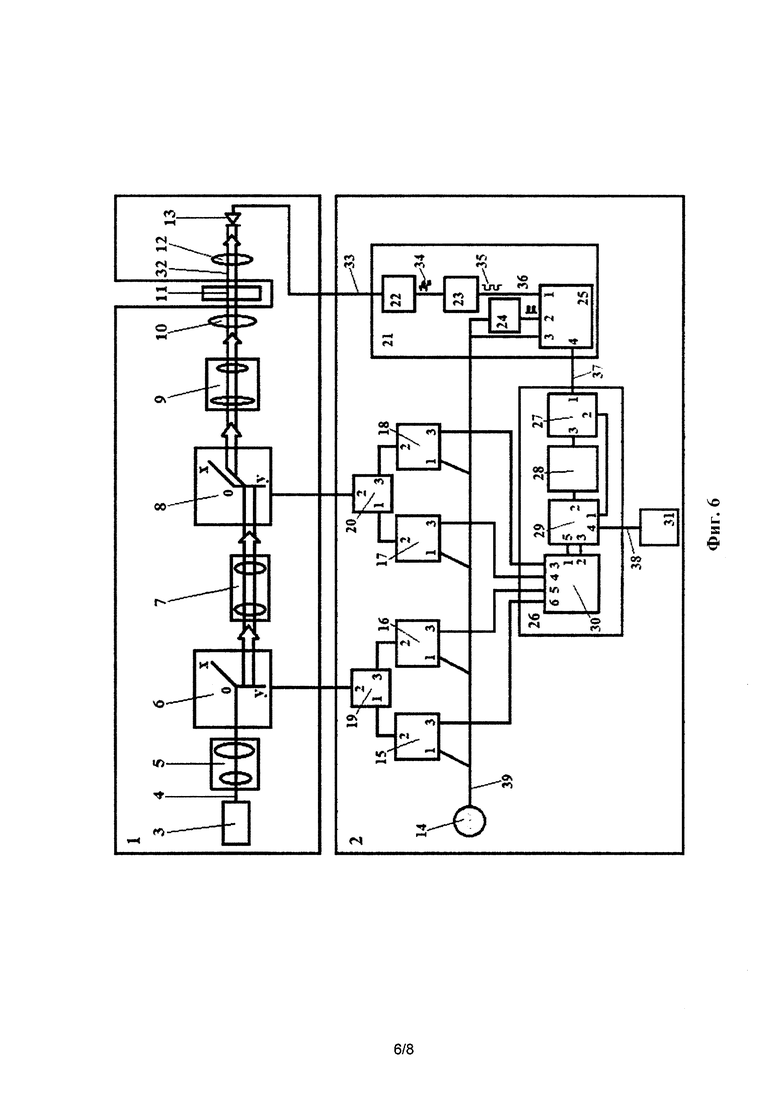
Фиг. 6 - принципиальная функциональная схема Устройства 2;
Фиг. 7 - пример использования Устройства 2 в медицине;
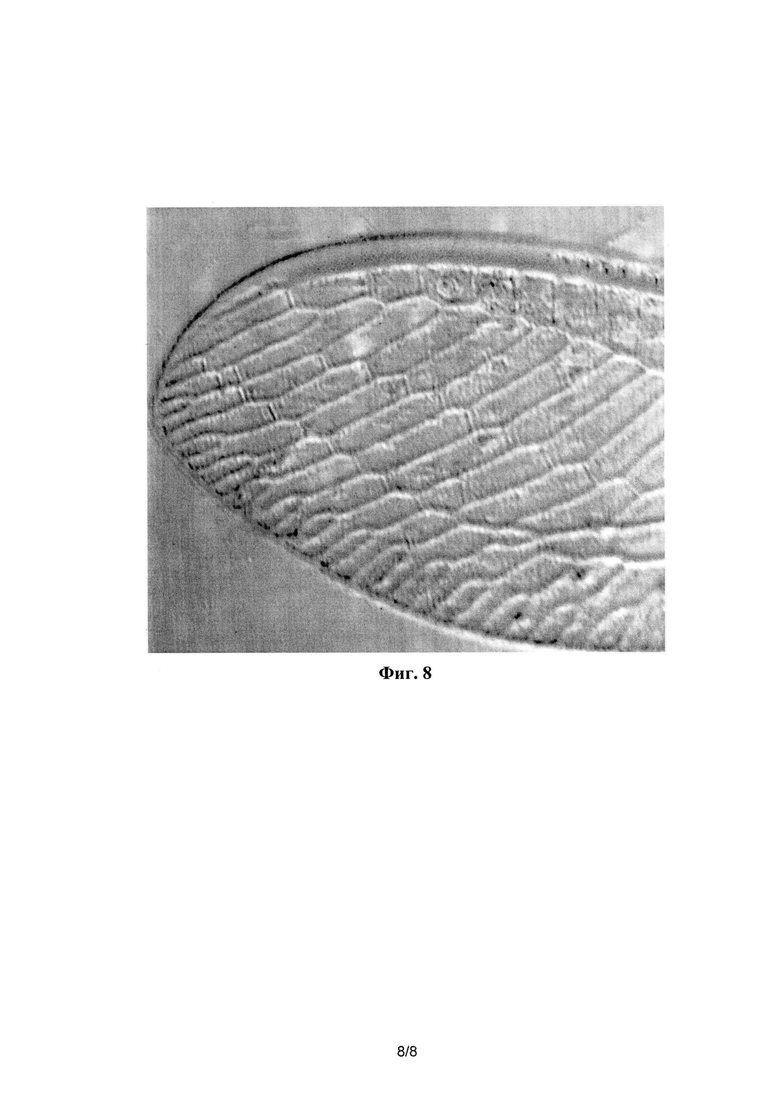
Фиг. 8 - пример использования Устройства 2 в биологии.
Принципиальная функциональная схема (Фиг. 3) Устройства 1 состоит из двух частей - оптической части 1 и электронной части 2.
Оптическая часть 1 Устройства 1 включает источник 3 излучения, установленные последовательно по ходу светового пучка 4 и связанные между собой технологически (оптически и механически) первую оптическую систему 5, первый акустооптический дефлектор 6, телескопическую систему Бадаля 7, второй акустооптический дефлектор 8, вторую оптическую систему 9, объектив 10, светоделитель 12 и фотоприемник 13.
В качестве источника 3 излучения используют источник когерентного излучения с линейной поляризацией (лазер). Оптическая ось устройства является ломаной, т.е. смещена в пространстве от прямой (мнимой) оси по соответствующим направлениям (ОХ и OY) - от дефлектора 6 через телескопическую систему 7 Бадаля к дефлектору 8 (по оси OY), от дефлектора 8 ко второй оптической системе 9 и исследуемой поверхности 11 (по оси ОХ). Первая оптическая система 5 выполнена с возможностью расширения светового пучка 4 на входе первого акустооптического дефлектора 6. Акустооптические дефлекторы 6 и 8 выполнены с возможностью разделения светового пучка 4 на два пучка, их смещения в пространстве и по частоте и сканирования по одной из осей (оси ОХ или оси OY), и расположены друг относительно друга с поворотом на 90°. Телескопическая система 7 Бадаля позволяет перенести центр сканирования с первого акустооптического дефлектора 6 на второй акустооптический дефлектор 8. Вторая оптическая система 9 согласовывает диаметр сканирующего пучка с входным зрачком объектива 10 и выполнена так, что светоделитель 12 находится на оси светового пучка 4 между линзами второй оптической системы 9. Светоделитель 12 делит световой пучок на равные доли - их интенсивности должны равняться около 50% интенсивности падающего света. Объектив 10 предназначен для фокусировки светового пучка на исследуемую поверхность 11 и приема отраженного светового пучка. На фотоприемник 13 поступают отраженные от исследуемой поверхности 11 световые пучки с разной частотой. Фотоприемник 13 должен обеспечивать высокие чувствительность, соотношение сигнал/шум, динамический диапазон и минимальные фазовые искажения.
Электронная часть 2 Устройства 1 включает генератор 14 опорных сигналов; генераторы 15, 16, 17 и 18 управляющих сигналов; сумматоры 19 и 20; фазовый детектор 21, включающий частотный фильтр 22, усилитель-ограничитель 23, счетчик-синхронизатор 24 и цифровой счетчик 25; блок 26 управления и обработки, включающий модуль 27 выбора режимов работы, модуль 28 реконструкции рельефа поверхности исследуемого объекта, модуль 29 выбора режимов отображения, модуль 30 управления разверткой и видеомонитор 31.
Элементы электронной части 2 Устройства 1 соединены между собой таким образом. Выход фотоприемника 13 соединен с входом фазового детектора 21, который одновременно является входом частотного фильтра 22, выход которого соединен с входом усилителя-ограничителя 23, выход усилителя-ограничителя, в свою очередь, соединен с первым входом цифрового счетчика 25. Выход генератора 14 опорных сигналов соединен с первыми входами генераторов 15, 16, 17 и 18 управляющих сигналов, с входом счетчика-синхронизатора 24 и третьим входом цифрового счетчика 25, притом что выход счетчика-синхронизатора 24 соединен со вторым входом цифрового счетчика 25, выход которого соединен с входом блока 26 управления и обработки, который одновременно является входом модуля 27 выбора режима работы, при этом выходы модуля выбора режима работы 27 соединены с входами модуля 28 реконструкции рельефа поверхности исследуемого объекта и модуля 29 выбора режима отображения, а выход модуля 28 реконструкции рельефа поверхности исследуемого объекта соединен со вторым входом модуля 29 выбора режима отображения, один из выходов которого соединен с входом дополнительно установленного видеомонитора 31, а второй - со входом модуля 30 управления разверткой, первый выход которого, в свою очередь, соединен обратной связью с третьим входом модуля 29 выбора режима отображения, притом что третий, четвертый, пятый и шестой выходы модуля 30 управления разверткой соединены соответственно со вторыми входами генераторов 15, 16, 17 и 18 управляющих сигналов, выходы которых через сумматоры 19 и 20 соединены с входами первого 6 и второго 8 акустооптических дефлекторов.
Устройство 1 работает таким образом.
Источник 3 излучения (Фиг. 3) генерирует световой пучок 4, который расширяется в первой оптической системе 5, проходит первый акустооптический дефлектор 6, который разделяет световой пучок 4 на две части для смещения их в пространстве (например по оси OY) и дальнейшего сканирования, проходит телескопическую систему 7 Бадаля, которая переносит центр сканирования с первого 6 на второй акустооптический дефлектор 8, который, в свою очередь, разделяет световой пучок на две части для смещения их в пространстве (например, по оси ОХ) и дальнейшего сканирования. Разделенный во втором акустооптическом дефлекторе 8 световой пучок сужается во второй оптической системе 9, между линзами которой расположен светоделитель 12, и попадает на линзы объектива 10 и далее на исследуемую поверхность 11. Отраженный от поверхности светоделителя 12 и, соответственно, от исследуемой поверхности 11 оптический сигнал 32 попадает на фотоприемник 13, где превращается в его электрический аналог - сигнал 33.
Сигнал 33 поступает на вход фазового детектора 21, который одновременно является входом частотного фильтра 22. Частотный фильтр 22 ограничивает полосу частот входящего сигнала 33 и выделяет из него в виде периодического синусоидального сигнала 34 переменную составляющую с частотой Δf, фаза которой несет информацию о разнице фаз световых пучков 32, отраженных от исследуемой поверхности 11 при каждом измерении, и которая в выбранном для исследования множестве точек, состоящем из рядов точек, расположенных вдоль оси ОХ и отдельно вдоль оси OY, является главным носителем информации о параметрах (высоте, локальных наклонах) исследуемой поверхности 11. При этом данные, полученные для каждой исследуемой точки (ее координаты, установленные при измерении данной точки направление и величина разделения световых пучков) сохраняются.
Периодический синусоидальный сигнал 34 поступает на усилитель-ограничитель 23, который обрабатывает входящий сигнал таким образом, что на его выходе образуется сигнал прямоугольной формы 35 с фазой, соответствующей фазе входного синусоидального сигнала 34 независимо от колебаний амплитуды последнего.
Прямоугольный сигнал 35 поступает на цифровой счетчик 25, который осуществляет измерение фазы (соответствующей переменной составляющей с частотой Δf) прямоугольного сигнала 35 относительно стартового сигнала 36, который генерирует счетчик-синхронизатор 24 на основе опорного сигнала 39 генератора 14 опорных сигналов. При этом, благодаря одновременному использованию сигнала 39 общего генератора 14 опорных сигналов как для генерирования управляющих сигналов для акустооптических дефлекторов 6 и 8, так и для генерирования опорного сигнала для счетчика-синхронизатора 24, начальная фаза переменной составляющей с частотой Δf совпадает с фазой стартового сигнала 36.
Выходящий из цифрового счетчика 25 сигнал 37, который соответствует фазе прямоугольного сигнала 35 и, соответственно, параметрам исследуемой поверхности 11, обрабатывается в блоке 26 управления и обработки и в виде видеосигнала 38 направляется на вход видеомонитора 31. При этом модуль 27 выбора режимов работы блока 26 управления и обработки путем измерения вдоль осей ОХ и OY конечных изменений параметров (высоты, локальных наклонов) исследуемой поверхности 11 позволяет задавать режим сканирования и считывания параметров исследуемой поверхности 11 и (или) задавать режим вывода данных о ее параметрах на модуль 28 выбора режимов отображения; модуль 28 реконструкции рельефа поверхности исследуемого объекта блока 26 управления и обработки на основе сигналов формирует данные о параметрах исследуемого объекта 11 и направляет их на модуль 29 выбора режимов отображения; модуль 29 выбора режимов отображения блока 26 управления и обработки осуществляет выбор формы представления данных, полученных с модуля 27 выбора режимов работы и модуля 28 реконструкции рельефа поверхности, для передачи их на вход видеомонитора 31. Выходящий из блока 26 управления и обработки видеосигнал 38 поступает на вход видеомонитора 31, на экране которого в режиме реального времени в избранных масштабе и гамме цветов наблюдают параметры (высота, локальные наклоны) и (или) изображение рельефа исследуемой поверхности 11. Одновременно с выходов модуля 30 управления разверткой, совпадающих с выходами блока 26 управления и обработки на генераторы 15, 16, 17 и 18 управляющих сигналов направляется сигнал, сформированный, исходя из количества точек сканирования, которые считываются, в модуле 30 управления разверткой, куда также поступает сигнал 39 с выхода генератора 14 опорных сигналов. Генераторы 15, 16, 17 и 18 управляющих сигналов, в свою очередь, формируют управляющие сигналы, которые через сумматоры 19 и 20 направляются на акустооптические дефлекторы 6 и 8 и управляют разделением, смещением и сканированием светового пучка 4.
Устройство 1 обеспечивает возможность непосредственного измерения (без использования эталонных образцов) параметров (высоты, локальных наклонов) поверхности исследуемого объекта, и возможность построения трехмерного (3D) изображения ее рельефа. Кроме того, Устройство 1 по сравнению с известным устройством дифференциально-фазовой профилометрии/профилографии имеет более простые принципиальную функциональную схему и конструктивное выполнение, а также более высокие чувствительность, быстродействие, точность и достоверность результатов измерений.
Пример использования Устройства 1 в машиностроении и в медицине иллюстрируют соответственно Фиг. 4 и Фиг. 5. На Фиг. 4 на экране видеомонитора устройства представлено изображение поверхности напыленного золотом (Ra=30 нм) стандартного стеклянного эталона шероховатости поверхности по ГОСТу 2789-73, а на Фиг. 5 - имплантат тазобедренного сустава человека для эндопротезирования (слева) и профилограмма его поверхности (справа).
Принципиальная функциональная схема (Фиг. 6) Устройства 2 состоит из двух частей - оптической части 1 и электронной части 2.
Оптическая часть 1 Устройства 2 включает источник 3 излучения, установленные последовательно по ходу светового пучка 4 и связанные между собой технологически (оптически и механически) первую оптическую систему 5, первый акустооптический дефлектор 6, телескопическую систему Бадаля 7, второй акустооптический дефлектор 8, вторую оптическую систему 9, объектив 10 и установленный за исследуемым объектом 11 объектив 12, фотоприемник 13.
В качестве источника 3 излучения используют источник когерентного излучения с линейной поляризацией (лазер). Оптическая ось Устройства 1 является ломаной, т.е. смещена в пространстве от прямой (мнимой) оси по соответствующим направлениям (OY и ОХ) - от дефлектора 6 через телескопическую систему 7 Бадаля к дефлектору 8 (по оси OY), от дефлектора 8 ко второй оптической системе 9 и исследуемому объекту 11 (по оси ОХ). Первая оптическая система 5 выполнена с возможностью расширения светового пучка 4 на входе первого акустооптического дефлектора 6. Акустооптические дефлекторы 6 и 8 выполнены с возможностью разделения светового пучка 4 на два пучка, их сдвига в пространстве и по частоте и сканирования по одной из осей (ОХ или OY), и расположены друг относительно друга с поворотом на 90°. Телескопическая система 7 Бадаля позволяет перенести центр сканирования с первого акустооптического дефлектора 6 на второй акустооптический дефлектор 8. Вторая оптическая система 9 согласовывает диаметр сканирующего пучка с входным зрачком объектива 10, который фокусирует световой пучок 4 на исследуемый объект 11. Объектив 12 направляет световой пучок, прошедший сквозь объект 11, на фотоприемник 13. Фотоприемник 13 должен иметь высокие чувствительность, соотношение сигнал/шум, динамический диапазон и минимальные фазовые искажения.
Электронная часть 2 Устройства 2 включает генератор 14 опорных сигналов; генераторы 15, 16, 17 и 18 управляющих сигналов; сумматоры 19 и 20; фазовый детектор 21, включающий частотный фильтр 22, усилитель-ограничитель 23, счетчик-синхронизатор 24 и цифровой счетчик 25; блок 26 управления и обработки, включающий модуль 27 выбора режимов работы, модуль 28 создания «карты рефракции» (распределения плотности) исследуемого объекта, модуль 29 выбора режимов отображения, модуль 30 управления разверткой и видеомонитор 31.
Элементы электронной части 2 Устройства 2 соединены между собой таким образом. Выход фотоприемника 13 соединен с входом фазового детектора 21, который одновременно является входом частотного фильтра 22, выход которого соединен с входом усилителя-ограничителя 23, выход усилителя-ограничителя, в свою очередь, соединен с первым входом цифрового счетчика 25. Выход генератора 14 опорных сигналов соединен с первыми входами генераторов 15, 16, 17 и 18 управляющих сигналов, с входом счетчика-синхронизатора 24 и третьим входом цифрового счетчика 25, притом что выход счетчика-синхронизатора 24 соединен со вторым входом цифрового счетчика 25, выход которого соединен с входом блока 26 управления и обработки, который одновременно является входом модуля 27 выбора режима работы, при этом выходы модуля выбора режима работы 27 соединены со входами модуля 28 создания «карты рефракции» (распределения плотности) исследуемого объекта и модуля 29 выбора режима отображения, а выход модуля 28 создания «карты рефракции» (распределения плотности) исследуемого объекта соединен со вторым входом модуля 29 выбора режима отображения, один из выходов которого соединен с входом дополнительно установленного видеомонитора 31, а второй - со входом модуля 30 управления разверткой, первый выход которого, в свою очередь, соединен обратной связью с третьим входом модуля 29 выбора режима отображения, притом что третий, четвертый, пятый и шестой выходы модуля 30 управления разверткой соединены соответственно со вторыми входами генераторов 15, 16, 17 и 18 управляющих сигналов, выходы которых через сумматоры 19 и 20 соединены со входами первого 6 и второго 8 акустооптических дефлекторов.
Устройство 2 работает таким образом.
Источник 3 излучения (Фиг. 6) генерирует световой пучок 4, который расширяется в первой оптической системе 5, проходит первый акустооптический дефлектор 6, который разделяет световой пучок 4 на две части для смещения их в пространстве (например, по оси OY) и дальнейшего сканирования, проходит телескопическую систему 7 Бадаля, которая переносит центр сканирования с первого 6 на второй акустооптический дефлектор 8, который, в свою очередь, разделяет световой пучок на две части для смещения их в пространстве (например, по оси ОХ) и дальнейшего сканирования. Разделенный во втором акустооптическом дефлекторе 8 световой пучок сужается во второй оптической системе 9 и попадает на линзы объектива 10 и далее на исследуемый объект 11. Световой пучок 32, который прошел через толщу исследуемого объекта 11 попадает на объектив 12, который направляет световой пучок 32 на фотоприемник 13, где преобразуется в его электрический аналог - сигнал 33.
Сигнал 33 поступает на вход фазового детектора 21, который одновременно является входом частотного фильтра 22. Частотный фильтр 22 ограничивает полосу частот входящего сигнала 33 и выделяет из него в виде периодического синусоидального сигнала 34 переменную составляющую с частотой Δf, фаза которой несет информацию о разнице фаз световых пучков 32, прошедших через толщу исследуемого объекта 11 при каждом измерении, и которая в выбранном для исследования множестве точек, состоящем из рядов точек, расположенных вдоль оси ОХ и отдельно вдоль оси OY, является главным носителем информации о параметрах (показателе преломления, плотности) исследуемого объекта 11. При этом данные, полученные для каждой исследуемой точки (ее координаты, установленные при измерении данной точки направление и величина разделения световых пучков) сохраняются.
Периодический синусоидальный сигнал 34 поступает на усилитель-ограничитель 23, который обрабатывает входящий сигнал таким образом, что на его выходе образуется сигнал прямоугольной формы 35 с фазой, соответствующей фазе входного синусоидального сигнала 34 независимо от колебаний амплитуды последнего.
Прямоугольный сигнал 35 поступает на цифровой счетчик 25, который осуществляет измерение фазы (соответствующей переменной составляющей с частотой Δf) прямоугольного сигнала 35 относительно стартового сигнала 36, который генерирует счетчик-синхронизатор 24 на основе опорного сигнала 39 генератора 14 опорных сигналов. При этом, благодаря одновременному использованию сигнала 39 общего генератора 14 опорных сигналов как для генерирования управляющих сигналов для акустооптических дефлекторов 6 и 8, так и для генерирования опорного сигнала для счетчика-синхронизатора 24, начальная фаза переменной составляющей с частотой Δf совпадает с фазой стартового сигнала 36.
Выходящий из цифрового счетчика 25 сигнал 37, который соответствует фазе прямоугольного сигнала 35 и, соответственно, параметрам исследуемого объекта 11, обрабатывается в блоке 26 управления и обработки и в виде видеосигнала 38 направляется на вход видеомонитора 31. При этом модуль 27 выбора режимов работы блока 26 управления и обработки путем измерения вдоль осей ОХ и OY конечных изменений показателя преломления в исследуемом объекте 11 позволяет задавать режим сканирования и считывания параметров (показателя преломления, плотности) исследуемого объекта 11 и (или) задавать режим вывода данных о параметрах исследуемого объекта 11 на модуль 28 выбора режимов отображения; модуль 28 создания «карты рефракции» (распределения плотности) исследуемого объекта блока 26 управления и обработки на основе сигналов формирует данные о параметрах исследуемого объекта 11 и направляет их на модуль 29 выбора режимов отображения; модуль 29 выбора режимов отображения блока 26 управления и обработки осуществляет выбор формы представления данных, полученных с модуля 27 выбора режимов работы и модуля 28 создания «карты рефракции» (распределения плотности) исследуемого объекта, для передачи их на вход видеомонитора 31. Выходящий из блока 26 управления и обработки видеосигнал 38 поступает на вход видеомонитора 31, на экране которого в режиме реального времени в избранных масштабе и гамме цветов наблюдают параметры (показатели преломления, распределение плотности) и (или) «карту рефракции» (распределение плотности) исследуемого объекта 11. Одновременно с выходов модуля 30 управления разверткой, совпадающих с выходами блока 26 управления и обработки на генераторы 15, 16, 17 и 18 управляющих сигналов направляется сигнал, сформированный, исходя из количества точек сканирования, которые считываются, в модуле 30 управления разверткой, куда также поступает сигнал 39 с выхода генератора 14 опорных сигналов. Генераторы 15, 16, 17 и 18 управляющих сигналов, в свою очередь, формируют управляющие сигналы, которые через сумматоры 19 и 20 направляются на акустооптические дефлекторы 6 и 8 и управляют разделением, смещением и сканированием светового пучка 4.
Устройство 2 обеспечивает возможность непосредственного определения (без использования эталонных образцов и контрастных веществ) плотности исследуемого объекта и (или) построения на экране видеомонитора двумерного (2D) или трехмерного (3D) изображения «карты рефракции» (распределения плотности) исследуемого объекта. Кроме того, Устройство 2 по сравнению с известным устройством дифференциально-фазовой профилометрии и/или профилографии имеет более простые принципиальную функциональную схему и конструктивное выполнение, а также более высокие чувствительность, быстродействие, точность и достоверность результатов измерений.
Пример использования Устройства 2 в медицинской отрасли и в биологии иллюстрируют соответственно Фиг. 7 и Фиг. 8. На Фиг. 7 представлено изображение эритроцитов, а на Фиг. 8 - изображение крыльца златоглазки.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент Украины №19905 Способ исследования рельефных и фазовых объектов в лазерном сканирующем микроскопе и устройство для его осуществления (Cпoci6 дослiдження  та фазових
та фазових  у лазерному скануючому мiкроскопi та пристрiй для його здiйснення) (перерегистрированное Авторское Свидетельство СССР №1734066 А1 от 30.03.1989), G02В 21/00, 25.12.1997.
у лазерному скануючому мiкроскопi та пристрiй для його здiйснення) (перерегистрированное Авторское Свидетельство СССР №1734066 А1 от 30.03.1989), G02В 21/00, 25.12.1997.
2. Патент США №5481360 А Оптическое устройство для измерения формы поверхности (Opticaldeviceformeasuringsurfaceshape), G01В 11/00, 02.01.1996.
3. Патент Украины №66936 Устройство для измерения рефракционных аберраций глаза (Пристрiй для вимiрювання рефракцiйних аберацiй ока), А61В 3/00, А61В 3/10, А61В 3/14,15.06.2004.
4. www.biochemistry.org.ua/index.php/uklactivities/services.html
5. Патент Российской Федерации на изобретение №2179328 Способ дифференциально - фазовой профилометрии и/или профилографии и устройство для его реализации, G02В 21/00, G01В 11/30, 19.06.2001.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИФФЕРЕНЦИАЛЬНО-ФАЗОВОЙ ПРОФИЛОМЕТРИИ И/ИЛИ ПРОФИЛОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2179328C1 |
| Способ исследования рельефных и фазовых объектов и лазерный сканирующий микроскоп для его осуществления | 1989 |
|
SU1734066A1 |
| Устройство для ввода изображения | 1981 |
|
SU1032443A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЛНОВЫХ АБЕРРАЦИЙ ГЛАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2257136C2 |
| Дистанционный оптический абсорбционный лазерный газоанализатор с длиной волны излучения в области 1,6 мкм (2 варианта), способ его осуществления и оптоволоконный рамановский усилитель для дистанционного оптического абсорбционного лазерного газоанализатора с длиной волны излучения в области 1,6 мкм | 2018 |
|
RU2694461C1 |
| СПОСОБ КОНТРОЛЯ ОПТИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2188389C2 |
| Оптический анализатор спектра сигнала | 1986 |
|
SU1374139A1 |
| УСТРОЙСТВО ДЛЯ МНОГОСЛОЙНОЙ ОПТИЧЕСКОЙ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ИНФОРМАЦИИ | 1999 |
|
RU2172028C2 |
| Устройство для записи информации | 1988 |
|
SU1665396A1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |


Группа изобретений, раскрывающая способ определения параметров объекта и устройство для его реализации, относится к методам дифференциально-фазовой профилометрии и используется для экспресс-анализа с целью определения количества и размеров частиц в маслах, в прозрачных веществах и биологических средах. Способ определения параметров объекта и устройство для его реализации реализуется путем непосредственного измерения фазы переменной составляющей фототока с частотой Δf между частотными параметрами каждого из пары разнесенных по частоте и в пространстве и отраженных от поверхности исследуемого объекта (или прошедших сквозь него) сканирующих световых пучков и воссоздания изображения рельефа поверхности исследуемого объекта или построения его «карты рефракции» (распределение плотности). Технический результат – обеспечение возможности исследования как непрозрачных, так и прозрачных объектов. 2 н. и 1 з.п. ф-лы, 8 ил.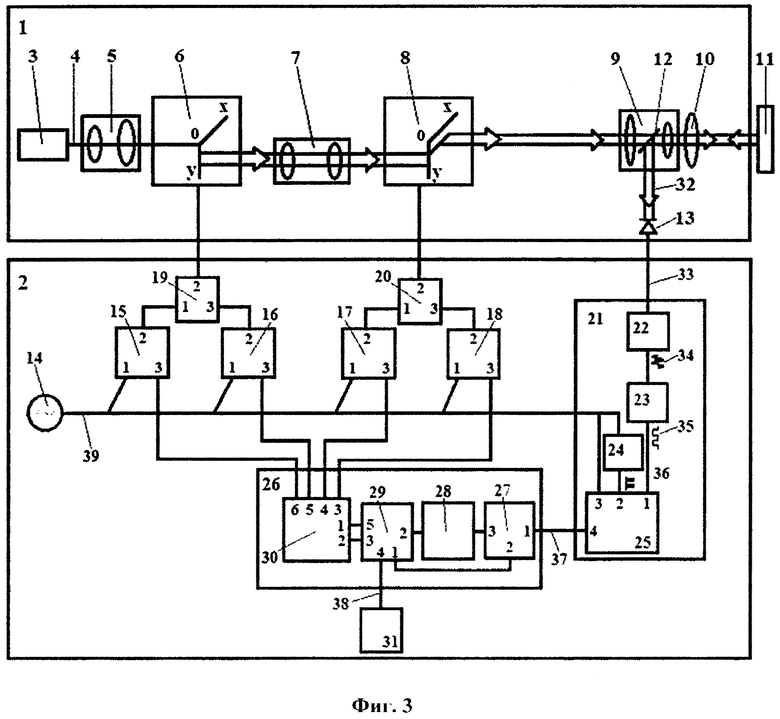
1. Способ определения параметров объекта с использованием метода дифференциально-фазовой профилометрии/профилографии, заключающийся в том, что исследуемый объект сканируют по двум взаимно ортогональным направлениям с совмещением центров сканирования двумя световыми пучками, образованными путем предварительного поочередного разделения светового пучка в каждом из двух акустооптических дефлекторов на по меньшей мере два световых луча, один из которых сдвигают относительно других по частоте и в пространстве вдоль первой оси в первом акустооптическом дефлекторе и вдоль ортогональной ей второй оси во втором акустооптическом дефлекторе, притом что сканирование осуществляют путем перемещения световых пучков через каждую точку множества точек исследуемого объекта, находящихся в границах выбранной для исследования области, сначала по одной из траекторий, ориентированной в направлении первой оси, двумя световыми пучками, которые разделены в плоскости первой оси, а затем по одной из траекторий, ориентированной в направлении второй оси, которая ортогональна первой оси, двумя световыми пучками, которые разделены в плоскости второй оси, после чего отраженные от поверхности исследуемого объекта (или прошедшие сквозь объект) световые пучки направляют на фотоприемник, где их трансформируют в электрические сигналы, и одновременно со сканированием определяют параметры исследуемого объекта путем измерения фазы переменной составляющей фототока с частотой Δf, равной разности между частотными параметрами каждого из пары разнесенных по частоте и в пространстве сканирующих световых пучков, притом что параметры каждой отдельной точки исследуемого объекта измеряют дважды (в конце предыдущего и в начале следующего такта сканирования), и на основании полученных данных воссоздают изображение рельефа поверхности и (или) строят «карту рефракции» (распределение плотности) исследуемого объекта.
2. Устройство для определения параметров объекта, которое состоит из источника излучения, в качестве которого может быть использован лазер, установленных по ходу светового пучка и соединенных между собой последовательно и механически на одной оптической оси первой оптической системы, выполненной с возможностью расширения светового пучка, по меньшей мере двух акустооптических дефлекторов, каждый из которых выполнен с возможностью разделения светового пучка по меньшей мере на два пучка, смещения их по частоте и в пространстве и сканирования выбранного участка исследуемого объекта по двум взаимно ортогональным направлениям, второй оптической системы, выполненной с возможностью сужения светового пучка, светоделителя, объектива и фотоприемника, по меньшей мере двух генераторов управляющих сигналов для каждого акустооптического дефлектора с общим генератором опорной частоты для всех генераторов управляющих сигналов каждого акустооптического дефлектора, притом что выходы генераторов управляющих сигналов соединены с входом соответствующего акустооптического дефлектора через сумматор, фазового детектора и блока управления и обработки, отличающееся тем, что оптическая ось, на которой установлены источник излучения, акустооптические дефлекторы, первая и вторая оптические системы, светоделитель, объектив и фотоприемник, является ломаной, в состав устройства дополнительно введены телескопическая система Бадаля для переноса центра сканирования с первого на второй акустооптический дефлектор и видеомонитор для визуализации результатов измерений, из состава устройства изъят фотоприемник опорного сигнала, в состав фазового детектора дополнительно введен частотный фильтр, усилитель-ограничитель, счетчик-синхронизатор и цифровой счетчик, из состава блока управления и обработки исключены модули установки пределов поверхности исследования, фильтрации шума, аппроксимации, интегрирования, запоминания, расчета параметров поверхности, аналого-цифровой преобразователь и дополнительно введены модуль реконструкции рельефа поверхности исследуемого объекта, модуль выбора режимов отображения и модуль управления разверткой, притом что выход фотоприемника соединен с входом фазового детектора, который одновременно является входом частотного фильтра, выход которого соединен с входом усилителя-ограничителя, а выход усилителя-ограничителя соединен с первым входом цифрового счетчика, выход генератора опорных сигналов соединен с первыми входами генераторов управляющих сигналов, с входом счетчика-синхронизатора и с третьим входом цифрового счетчика, притом что выход счетчика-синхронизатора соединен со вторым входом цифрового счетчика, выход которого соединен с входом блока управления и обработки, который одновременно является входом модуля выбора режима работы, при этом выходы модуля выбора режима работы соединены с входами модуля реконструкции рельефа поверхности исследуемого объекта и модуля выбора режима отображения, а выход модуля рельефа поверхности исследуемого объекта соединен со вторым входом модуля выбора режима отображения, один из выходов которого соединен с входом дополнительно установленного видеомонитора, а второй - с входом модуля управления разверткой, первый выход которого, в свою очередь, соединен обратной связью с третьим входом модуля выбора режима отображения, притом что остальные четыре выхода модуля управления разверткой, которые одновременно являются выходами блока управления и обработки, соединены с входами генераторов управляющих сигналов, выходы которых через сумматоры соединены со входами первого и второго акустооптических дефлекторов.
3. Устройство по п. 2, отличающееся тем, что из состава устройства изъят светоделитель и за исследуемым объектом дополнительно установлен второй объектив для фокусировки на фотоприемник световых пучков, прошедших сквозь исследуемый объект, из состава блока управления и обработки изъят модуль реконструкции рельефа поверхности исследуемого объекта и дополнительно введен модуль создания «карты рефракции» (распределения плотности) исследуемого объекта.
| Бесконтактный интерференционный профилограф | 1986 |
|
SU1384950A1 |
| US 5953126 A1, 14.09.1999 | |||
| US 4732485 A1, 20.03.1988 | |||
| US 4577967 A1, 25.03.1986. | |||

