[0001] В настоящей заявке заявлено преимущество по предварительной заявке США №61/738,786, поданной 18 декабря 2012, которая полностью включена в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Варианты реализации настоящего изобретения в целом относятся к беспроводной передаче энергии для систем зарядки и/или питания, таких, которые могут быть использованы помимо прочего в электрических транспортных средствах и переносных устройствах.
УРОВЕНЬ ТЕХНИКИ
[0003] С возобновлением интереса к электромобилям наблюдается появление новых разработок в технологии изготовления батарей, быстрых способов зарядки и беспроводной передачи энергии в качестве удобного способа для подзарядки батарей. Способы беспроводной быстрой зарядки становятся все более соответствующими для экологически чистых электромобилей как способ увеличения дальности, ограниченной современной технологией изготовления батарей. Таким образом, батареи можно подзаряжать во время движения от катушек, встроенных в дорожное полотно, перед светофорами, в местах стоянки автомобилей во время совершения покупок или в ресторанах для автомобилистов.
[0004] Беспроводная передача энергии имеет длинную историю, начинающуюся, вероятно, с опытов Теслы. В настоящее время эта технология используется повсюду, например, в зубных щетках, сотовых телефонах, портативных компьютерах, и даже рассматривается в качестве альтернативного источника питания для общего использования в домах, например, для осветительных приборов, часов и т.п. В большей части случаев применения беспроводная передача энергии применяется для зарядки батарей, которые используют в качестве временного хранилища энергии между беспроводной системой для зарядки и устройством. С появлением усовершенствованных технологий изготовления батарей, таких как литий-ионные ячейки, стала возможной зарядка батареи намного быстрее, чем прежде с использованием беспроводных скоростных зарядных устройств. Для достижения полного признания эти беспроводные скоростные зарядные устройства должны быть эффективными и надежными, что является основной целью некоторых случаев применения, описанных в настоящей заявке.
[0005] Известны различные типы беспроводной передачи энергии. Настоящее изобретение основано на резонансной индуктивной зарядке (RIC), не смотря на то, что большая часть того, что описано выше также может быть применено к другим типам беспроводных способов зарядки. В резонансной индуктивной зарядке, как можно понять из названия, используется высокодобротные настроенные катушки и конденсаторы, и энергия передается от катушки к катушке посредством магнитных полей. Резонансная индуктивная зарядка отличается от способов дальнего поля, включающих, например, СВЧ поля, которые требуют использования сложных электронных схем, и способов ближнего поля, которые действуют только в пределах части длины волны при использовании резонансной индуктивной зарядки. В случае резонансной индуктивной зарядки выяснилось, что между катушками может быть передано значительно большее количество энергии на расстояниях, превышающих несколько диаметров катушки. Использование магнитного поля вместо распространяющегося в радиальном направлении электромагнитного поле также представляет уменьшенный потенциальный вред для здоровья человека.
[0006] Общий тип катушек, используемых для резонансной индуктивной зарядки, имеет форму диска с одиночной спиральной намоткой, выполненной в плоскости. На фиг. 1 показана типичная схема резонансной индуктивной зарядки, на которой катушки L1 и L2 являются передающей и приемной катушками соответственно, изготовленными в форме дисковой катушки. Поскольку такая конструкция подобна трансформатору, электрические характеристики катушек могут быть описаны параметрами, такими как сопротивление катушек, самоиндукция и взаимная индукция. Взаимная индукция определяет какая часть поля, генерируемого одной катушкой, пересекает другую катушку (катушки), что в значительной степени зависит от геометрия, с которой катушки ориентированы относительно друг друга, включая расстояние и ориентацию. При уменьшении связи передается меньше энергии, в то время как потери мощности на омический нагрев остаются теми же самыми или увеличиваются, и, следовательно, уменьшается эффективность.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0007] В общем, согласно одному аспекту по меньшей мере одно из изобретений представляет способ обнаружения, находится ли приемная катушка рядом с передающей катушкой в системе для беспроводной передачи энергии (WPTS). Способ включает этапы, согласно которым: подают псевдослучайный сигнал на передающую катушку, во время подачи псевдослучайного сигнала на передающую катушку регистрируют один или большее количество сигналов, выработанных в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал, путем использования одного или большего количества зарегистрированных сигналов генерируют модель динамической системы для отдельного аспекта системы для беспроводной передачи энергии и используют сгенерированную модель динамической системы в сочетании с сохраненными обучающими данными для определения, находится ли объект, имеющий характеристики, отличающие указанный объект как приемную катушку, рядом с передающей катушкой.
[0008] Другие варианты реализации содержат один или большее количество следующих признаков. Способ также включает, если приемная катушка определена как находящаяся рядом с передающей катушкой, инициирование беспроводной передачи энергии посредством передающей катушки в приемную катушку. Псевдослучайный сигнал является псевдослучайным сигналом напряжения и/или является достаточно сильным для стимулирования нелинейности в приемной системе, соединенной с приемной катушкой. Один или большее количество сигналов содержат сигнал тока передающей катушки и, возможно, сигнал напряжения передающей катушки. Использование сгенерированной модели динамической системы включает сравнение информации, содержащейся в сгенерированной модели динамической системы, с выведенной опытным путем сохраненной информацией, которая указывает на присутствие рядом приемной катушки. Генерирование модели динамической системы включает использование идентификации системы для согласования выбранной модели с данными, выведенными из одного или большего количества зарегистрированных сигналов. Выбранной моделью является винеровская система, и/или выбранная модель имеет динамическую линейную часть и статическую нелинейную часть. Моделью динамической системы является функция импеданса передающей катушки или функция переданной энергии для передающей катушки. Использование сгенерированной модели динамической системы включает разложение модели динамической системы на базисные функции для генерирования набора параметров базисной функции и использование указанного набора параметров базисной функции для определения, находится ли приемная катушка рядом с передающей катушкой. Псевдослучайным сигналом является сигнал, выбранный из сигнала гауссовского белого шума и псевдослучайной двоичной последовательности (PRBS). Сгенерированная модель динамической системы содержит представление временной области или представление частотной области.
[0009] Другие варианты реализации содержат один или большее количество следующих признаков. Сохраненные обучающие данные представлены сохраненной фильтр-функцией, причем использование сгенерированной модели динамической системы в сочетании с сохраненными обучающими данными включает обработку сгенерированной модели динамической системы для генерирования выходного сигнала, при этом выходной сигнал указывает, находится ли объект, имеющий характеристики, распознаваемые из сохраненных обучающих данных как приемная катушка, рядом с передающей катушкой, и причем обработка модели динамической системы включает применение сохраненной фильтр-функции. Генерирование модели динамической системы включает вычисление частотного спектра из одного или большего количества зарегистрированных сигналов. Сгенерированная модель динамической системы представляет собой импедансный спектр для передающей катушки. Фильтр-функция является нелинейной фильтр-функцией. Нелинейная фильтр-функция выведена из измерений, выполненных на испытательной системе, содержащей испытательную передающую катушку и испытательную приемную катушку, расположенные на различных разделяющих расстояниях друг от друга. Способ также включает, если приемная катушка определена как находящаяся рядом с передающей катушкой, инициирование беспроводной передачи энергии посредством передающей катушки в обнаруженную приемную катушку.
[0010] В общем, согласно еще одному другому аспекту по меньшей мере одно изобретение представляет систему для беспроводной передачи энергии. Система для беспроводной передачи энергии содержит: передающую катушку; схему передатчика энергии, соединенную с передающей катушкой; схему датчика, соединенную с передающей катушкой; и электронное управляющее устройство для управления схемой передатчика энергии и схемой датчика, причем указанное электронное управляющее устройство содержит запоминающее устройство для сохранения обучающих данных и процессорную систему, запрограммированную для: вызова подачи схемой передатчика энергии псевдослучайного сигнала на передающую катушку; во время подачи псевдослучайного сигнала на передающую катушку - вызова регистрации схемой датчика одного или большего количества сигналов, выработанных в указанной системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал; путем использования одного или большего количества зарегистрированных сигналов - генерирования модели динамической системы для отдельного аспекта системы для беспроводной передачи энергии; и использования сгенерированной модели динамической системы в сочетании с указанными сохраненными обучающими данными для определения, находится ли объект, имеющий характеристики, отличающие указанный объект как приемную катушку, рядом с передающей катушкой.
[0011] Другие варианты реализации настоящего изобретения содержат один или большее количество следующих признаков. Один или большее количество сигналов содержат сигнал тока и сигнал напряжения передающей катушки.
[0012] Сохраненные обучающие данные представлены сохраненной фильтр-функцией, и процессорная система запрограммирована для использования сгенерированной модели динамической системы в сочетании с сохраненными обучающими данными путем обработки сгенерированной модели динамической системы для генерирования выходного сигнала, при этом выходной сигнал указывает, находится ли объект, имеющий характеристики, распознаваемые из сохраненных обучающих данных как приемная катушка, рядом с передающей катушкой, и обработки сгенерированной модели динамической системы включает применение фильтр-функции. Процессорная система запрограммирована для генерирования модели динамической системы путем вычисления частотного спектра из одного или большего количества зарегистрированных сигналов. Сгенерированной моделью динамической системы является импедансный спектр для передающей катушки.
В общем, согласно еще одному аспекту, по меньшей мере одно изобретение представляет способ поиска рабочей частоты для возбуждающего сигнала для передающей катушки в системе для беспроводной передачи энергии (WPTS). Способ включает: подачу псевдослучайного сигнала на передающую катушку; во время подачи псевдослучайного сигнала на передающую катушку регистрируют один или более сигналов, выработанных в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал; путем использования одного или большего количества зарегистрированных сигналов - генерируют модель динамической системы для отдельного аспекта системы для беспроводной передачи энергии; и проводят поиск оптимальной частоты для возбуждающего сигнала, причем проведение поиска включает повторяющееся использование сгенерированной модели динамической системы для моделирования реакции в ответ на возбуждающий сигнал во время изменения рабочей частоты возбуждающего сигнала до тех пор, пока не будет найдена оптимальная частота.
Другие варианты реализации содержат один или большее количество следующих признаков. Проведение поиска включает: вычисление выходной мощности на основании смоделированной реакции; использование вычисленной выходной мощности в качестве целевой функции; и проведение поиска путем использования целевой функции. Проведение поиска также включает задание рабочей частоты возбуждающего сигнала, равной оптимальной частоте. Псевдослучайный сигнал является псевдослучайным сигналом напряжения. Один или большее количество сигналов содержат сигнал тока передающей катушки, или они содержат как сигнал тока, так и сигнал напряжения передающей катушки. Генерирование представления передаточной функции включает использование идентификации системы или идентификации нелинейной системы для согласования модели с данными, выведенными из одного или большего количества зарегистрированных сигналов. Выбранная модель является винеровской системой или имеет динамическую линейную часть и статическую нелинейную часть. Сгенерированная модель динамической системы содержит представление временной области или представление частотной области.
В общем, согласно еще одному другому аспекту по меньшей мере одно из изобретений представляет систему для беспроводной передачи энергии. Система для беспроводной передачи энергии содержит: передающую катушку; схему передатчика энергии, соединенную с передающей катушкой; схему датчика, соединенную с передающей катушкой; и электронное управляющее устройство для управления схемой передатчика энергии и схемой датчика, причем указанное электронное управляющее устройство содержит запоминающее устройство для сохранения обучающих данных и процессорную систему, запрограммированную для: вызова подачи схемой передатчика энергии псевдослучайного сигнала на передающую катушку; во время подачи псевдослучайного сигнала на передающую катушку - вызова регистрации схемой датчика одного или большего количества сигналов, выработанных в указанной системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал; путем использования одного или большего количества зарегистрированных сигналов - генерирования модели динамической системы для отдельного аспекта системы для беспроводной передачи энергии; и проведения поиска оптимальной частоты для возбуждающего сигнала, при этом проведение поиска с повторением включает использование сгенерированной модели динамической системы для моделирования реакции на возбуждающий сигнал во время изменения рабочей частоты возбуждающего сигнала до тех пор, пока не будет найдена оптимальная частота.
В общем, согласно другому аспекту по меньшей мере одно из изобретений представляет способ поиска рабочей частоты для возбуждающего сигнала для передающей катушки в системе для беспроводной передачи энергии (WPTS). Способ включает: подачу псевдослучайного сигнала на передающую катушку; во время подачи псевдослучайного сигнала на передающую катушку - регистрируют сигнал, выработанный в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал; и обрабатывают зарегистрированный сигнал для генерирования выходного сигнала, причем выходной сигнал идентифицирует рабочую частоту, предназначенную для использования для возбуждающего сигнала, при этом обработка зарегистрированного сигнала включает применение нелинейной фильтр-функции.
Другие варианты реализации содержат одну или большее количество следующих особенностей. Нелинейная фильтр-функция была выведена из измерений, выполненных на испытательной системе, содержащей испытательную передающую катушку и испытательную приемную катушку, расположенных на различных разделяющих расстояниях друг от друга. Регистрация сигнала, выработанного в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал, включает регистрацию сигнала, выработанного передающей катушкой.
В общем, согласно еще одному аспекту по меньшей мере одно из изобретений представляет систему для беспроводной передачи энергии (WPTS). Система для беспроводной передачи энергии содержит: передающую катушку; схему передатчика энергии, соединенную с передающей катушкой; схему датчика, соединенную с передающей катушкой; и электронное управляющее устройство для управления схемой передатчика энергии и схемой датчика, причем указанное электронное управляющее устройство содержит запоминающее устройство для сохранения нелинейной фильтр-функции и процессорную систему, запрограммированную для: вызова подачи схемой передатчика энергии псевдослучайного сигнала на передающую катушку; во время подачи псевдослучайного сигнала на передающую катушку - вызова регистрации схемой датчика одного или большего количества сигналов, выработанных в указанной системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал; и обработки зарегистрированного сигнала для генерирования выходного сигнала, причем выходной сигнал идентифицирует рабочую частоту, которая будет использована для возбуждающего сигнала, при этом обработка зарегистрированного сигнала включает применение нелинейной фильтр-функции.
Другие варианты реализации содержат один или большее количество следующих признаков. Нелинейная фильтр-функция была выведена из измерений, выполненных в испытательной системе, содержащей испытательную передающую катушку и испытательную приемную катушку, расположенные на различных разделяющих расстояниях друг от друга. Регистрация сигнала, выработанного в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал, включает регистрацию сигнала, выработанного передающей катушкой.
В общем, согласно еще одному аспекту по меньшей мере одно из изобретений представляет систему для беспроводной передачи энергии (WPTS). Система для беспроводной передачи энергии содержит: передающую катушку; схему передатчика энергии, соединенную с передающей катушкой; схему датчика, соединенную с передающей катушкой; и электронное управляющее устройство для управления схемой передатчика энергии и схемой датчика, причем указанное электронное управляющее устройство содержит запоминающее устройство для сохранения обучающих данных и процессорную систему, запрограммированную для: вызова подачи передатчиком энергии псевдослучайного сигнала на передающую катушку; во время подачи псевдослучайного сигнала на передающую катушку - вызова регистрации схемой датчика одного или большего количества сигналов, выработанных в указанной системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал; и обработки зарегистрированного сигнала для генерирования выходного сигнала, причем выходной сигнал идентифицирует рабочую частоту, предназначенную для использования для возбуждающего сигнала, при этом обработка зарегистрированного сигнала включает применение нелинейной фильтр-функции.
Другие варианты реализации содержат одну или большее количество следующих особенностей. Нелинейная фильтр-функция была выведена из измерений, выполненных в испытательной системе, содержащей испытательную передающую катушку и испытательную приемную катушку, расположенные на различных разделяющих расстояниях друг от друга. Сигнал, выработанный в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал, является сигналом, выработанным передающей катушкой.
В общем, согласно еще одному аспекту по меньшей мере одно из изобретений представляет способ идентификации волновой формы для возбуждающего сигнала для передающей катушки в системе для беспроводной передачи энергии (WPTS). Способ включает: подачу псевдослучайного сигнала на передающую катушку; во время подачи псевдослучайного сигнала на передающую катушку регистрируют один или более сигналов, выработанных в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал; путем использования одного или большего количества зарегистрированных сигналов - генерируют модель динамической системы для отдельного аспекта системы для беспроводной передачи энергии; и проведение поиска оптимальной волновой формы для возбуждающего сигнала, причем проведение поиска с повторением включает использование сгенерированной модели динамической системы для моделирования реакции на возбуждающий сигнал во время изменения волновой формы возбуждающего сигнала до тех пор, пока не будет найдена оптимальная волновая форма.
Другие варианты реализации содержат одну или большее количество следующих особенностей. Проведение поиска дополнительно включает: вычисление выходной мощности из смоделированной реакции; использование вычисленной выходной мощности в качестве целевой функции; и проведение поиска путем использования целевой функции. Один или большее количество сигналов, выработанных в системе для беспроводной передачи энергии, содержат сигнал, выработанный передающей катушкой в ответ на поданный псевдослучайный сигнал.
В общем, согласно другому аспекту по меньшей мере одно из изобретений представляет систему для беспроводной передачи энергии. Система беспроводной передачи энергии содержит: передающую катушку; схему передатчика энергии, соединенную с передающей катушкой; схему датчика, соединенную с передающей катушкой; электронное управляющее устройство для управления схемой передатчика энергии и схемой датчика, причем указанное электронное управляющее устройство содержит запоминающее устройство для сохранения нелинейной фильтр-функции и процессорную систему, запрограммированную для: вызова подачи передатчиком энергии псевдослучайного сигнала на передающую катушку; во время подачи псевдослучайного сигнала на передающую катушку - вызова регистрации схемой датчика одного или большего количества сигналов, выработанных в указанной системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал; использования одного или большего количества зарегистрированных сигналов для генерирования модели динамической системы для отдельного аспекта системы для беспроводной передачи энергии; и проведения поиска оптимальной волновой формы для возбуждающего сигнала путем повторяющегося использования сгенерированной модели динамической системы для моделирования реакции на возбуждающий сигнал во время изменения волновой формы возбуждающего сигнала до тех пор, пока не будет найдена оптимальная волновая форма.
[0013] Подробности одного или большего количества вариантов реализации настоящего изобретения показаны на сопроводительных чертежах и сформулированы в описании, приведенном ниже. Другие признаки, объекты и преимущества настоящего изобретения будут очевидны из описания, чертежей и пунктов поданной формулы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0014] На фиг. 1 показана схема передачи электроэнергии с использованием передающей катушки L1 и приемной катушки L2.
[0015] На фиг. 2 показан типичный график электрического импеданса настроенной катушки в свободном пространстве и в связанном состоянии с соседней идентичной катушкой.
[0016] На фиг. 3 показаны импедансные спектры катушки передатчика для двух катушек, разнесенных друг от друга на различные расстояния.
[0017] На фиг. 4 показан спектр мощности катушки передатчика, соответствующий импедансным спектрам катушки, показанным на фиг. 3.
[0018] На фиг. 5 показана оптимальная частота для двух катушек в зависимости от разделительного расстояния между ними.
[0019] На фиг. 6 показана принципиальная схема винеровской системы.
[0020] На фиг. 7 показана принципиальная схема системы Гаммерштейна.
[0021] На фиг. 8 показана принципиальная схема системы для беспроводной передачи энергии, содержащей передающую и приемную катушки.
[0022] На фиг. 9 показана блок-схема алгоритма для предварительного обучения электронного управляющего устройства передатчика энергии в системе для беспроводной передачи энергии для обнаружения системы для беспроводного приема энергии.
[0023] На фиг. 10 показана блок-схема алгоритма, реализованного электронным управляющим устройством передатчика энергии для обнаружения присутствия системы для беспроводного приема энергии.
[0024] На фиг. 11 показана блок-схема алгоритма для создания нелинейного фильтра для использования в электронном управляющем устройстве передатчика энергии для обнаружения присутствия системы для беспроводного приема энергии.
[0025] На фиг. 12 показана блок-схема алгоритма, реализованного электронным управляющим устройством передатчика энергии для использования нелинейного фильтра, показанного на фиг. 11, для обнаружения присутствия системы для беспроводного приема энергии.
[0026] На фиг. 13 показана блок-схема алгоритма, реализованного электронным управляющим устройством передатчика энергии, для автоматического регулирования частоты сигнала для беспроводной передачи энергии.
[0027] На фиг. 14А показана блок-схема алгоритма для создания нелинейного фильтра для использования в электронном управляющем устройства передатчика энергии, для автоматического регулирования частоты сигнала для беспроводной передачи энергии.
[0028] На фиг. 14В показана блок-схема алгоритма, реализованного электронным управляющим устройством передатчика энергии для использования нелинейного фильтра, показанного на фиг. 14А, для автоматического регулирования частоты сигнала для беспроводной передачи энергии.
[0029] На фиг. 15 показана блок-схема алгоритма, реализованного по меньшей мере частично электронным управляющим устройством передатчика энергии, для регулирования волновой формы сигнала для беспроводной передачи энергии.
[0030] На фиг. 16А-16В показана блок-схема алгоритма для предварительного обучения электронного управляющего устройства передатчика энергии в системе для беспроводной передачи энергии для обнаружения инородных объектов.
[0031] На фиг. 17 показана блок-схема алгоритма, реализованного электронным управляющим устройством передатчика энергии, для обнаружения инородных объектов.
[0032] На фиг. 18А показана блок-схема алгоритма для создания нелинейного фильтра для использования в электронном управляющем устройстве передатчика энергии для обнаружения присутствия инородного объекта.
[0033] На фиг. 18В показана блок-схема алгоритма, реализованного электронным управляющим устройством передатчика энергии, для использования нелинейного фильтра, показанного на фиг. 18А, для обнаружения присутствия инородного объекта.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0034] Перед представлением подробностей различных вариантов реализации сначала будут описаны некоторые из проблем, которые решены этими вариантами реализации.
[0035] На фиг. 2 приведен типичный график электрического импеданса настроенной катушки, которая, например, может соответствовать передающей катушке в системе для беспроводной передачи энергии. Импеданс идеального конденсатора, включенного последовательно с катушкой индуктивности, имеет "нулевой" нуль на резонансной или собственной частоте, как показывает кривая С. Когда вторую настроенную катушку (катушку индуктивности и конденсатор, соединенные параллельно), называемую приемной катушкой, приводят в непосредственную близость к передающей катушке, импеданс на собственной частоте увеличивается в значительной степени, как показывает кривая А. Кривая, обозначенная как В, показывает импеданс системы с двумя катушками, когда приемная катушка также содержит резистивную нагрузку в своей цепи, на которой рассеивается электроэнергия, генерируемая во внешнем контуре. Нетрудно понять, что измерение импеданса, для которого требуется доступ только к двум клеммам передающей катушки, могло предоставить очень удобный инструмент для получения сведений о работе схемы.
[0036] Как показывает кривая на фиг. 2, знаменательно явление, происходящее, когда указанные две катушки приведены в непосредственную близость друг к другу, называется дроблением частоты. Когда передающая катушка и приемная катушка сближаются, могут наблюдаться две или большее количество частот при оптимальной передаче мощности локально в частотной области. Иными словами, наблюдаются два минимума, по одному на каждой стороне от собственной частоты. (Подробное описание этого явления приведено в: Alanson Р. Sample and Joshua R. Smith, Analysis, Experimental Results, and Range Adaptation of Magnetically Coupled Resonators for Wireless Power Transfer, 2010 IEEE; and Huang, X.L., et al., Resonant Frequency Splitting Analysis and Optimization of Wireless Power Transfer System, PIERS Proceedings, Russia, August 2012).
[0037] На фиг. 3 показан типичный график импеданса передающей катушки на различных расстояниях от приемной катушки. Поскольку катушки постепенно сближаются, пик импеданса на собственной частоте увеличивается, и эти две частоты, в которых минимумы импеданса наблюдаются с обеих сторон этого положения, все больше отдаляются по частоте друг от друга. На основании этих импедансных спектров могут быть вычислены энергетические спектры, указывающие, сколько энергии приходит в катушку. На фиг. 4 показаны соответствующие энергетические спектры. Как видно из чертежей, мощность является максимальной на двух частотах, расстояние между которыми все более уменьшается в зависимости от разнесения этих двух катушек вплоть до слияния двух пиков для всех практических целей при увеличенных разнесениях (слияния на собственной частоте системы).
[0038] На фиг. 5 представлены свойственные различным беспроводным системам оптимальные частоты, при которых происходит максимальная передача энергии, в зависимости от относительного разделительного расстояния между указанными двумя катушками с учетом диаметров катушек. Как показано на чертеже, если расстояние между катушками меньше чем примерно половина диаметра катушек, имеются две частоты, на которых наблюдается максимальная передача энергии. При фиксированной конфигурации легко выбрать оптимальную частоту генератора для передачи энергии. Однако в динамической ситуации, когда катушки перемещаются относительно друг друга, и расстояния между катушками является неизвестным, поддерживание оптимальной передачи энергии становится затруднительным.
[0039] Обычно, задача состоит в максимизации передачи электроэнергии в нагрузку. В лабораторных условиях могут быть присоединены измерительные выводы для измерения энергии, генерируемой схемой, в передатчике и измерения энергии, поступающей в нагрузку. Затем, путем использования качающейся частоты можно периодически измерять отношение принятой мощности к переданной мощности для обнаружения частоты, на которой происходит пиковая передача электроэнергии, и соответствующим образом регулировать частоту генератора. Обнаружение оптимальной частоты может быть выполнено с использованием некоторых алгоритмов, разработанных в теории оптимизации. Однако по причине дробления частоты и возможного существования двух локальных оптимальных частот, должны быть использованы способы, включающие стохастическую минимизацию. При нахождении оптимума оптимальная частота может быть отслежена в режиме реального времени с повышенной скоростью путем локальных поисков.
[0040] Однако, в реальных случаях применениях, таких как автомобили, перемещающиеся относительно друг друга или над передающими катушками, отсутствует возможность непосредственного измерения энергии, рассеянной в нагрузке. Автоматическая настройка частоты может быть достигнута посредством направленных ответвителей, расположенных, например, между передающей и приемной катушками, для измерения падающей и отраженной энергии (см. Sample и Smith). Другой способ может включать беспроводную передачу необходимых измерений, таких как измерение электрического тока в нагрузке, напряжения и мощности, от приемника к передатчику. Это может быть осуществлено путем передачи модулированного сигнала от приемной катушки на передающую катушку с использованием различных частотных диапазонов, на которые не влияет передача энергии. Согласно другому варианту реализации могут быть использованы другие способы передачи информации назад к передатчику, такие как оптические или акустические сигналы. Для передачи таких сигналов в катушки для передачи энергии могут быть встроены вспомогательные катушки.
[0041] Как показали Sample и Smith, способ моделирования может быть использован для определения зависимости переданной энергии от положения и ориентации катушек. В этом случае датчики положения, которые регистрируют расстояние между этими двумя катушками и их ориентацию, могут быть использованы для идентифицирования оптимальной частоту при передаче энергии.
[0042] Система для передачи электроэнергии, показанная на фиг. 1, содержит несколько нелинейных элементов, таких как выпрямители и вторичный преобразователь. Если бы система была линейной, для быстрой идентификации системы и извлечения из нее оптимальных параметров могли бы использоваться некоторые способы, описанные в инженерно-технической литературе. Однако, если такие способы использовались бы для выяснения, каким образом указанные возмущения в переданном сигнале будут влиять на сигнал, наблюдаемый в нагрузке, они, вероятно, оказались бы безрезультатными или дали неточные результаты из-за присутствия в цепи твердотельных нелинейных элементов, таких как выпрямительные диоды.
[0043] Также выяснилось, что передача увеличенной электроэнергии может быть достигнута с использованием несинусоидальной переходной волновой формы. Такая форма имеет конкретное преимущество, поскольку для минимизации потерь мощности в электронике используются элементы переключения мощности или мощные полевые транзисторы (FET), которые вместо синусоидальных сигналов генерируют сигналы в форме импульсов или ступеней. Такие мощные элементы или транзисторы содержат интегрированные биполярные транзисторы с изолированным затвором (IGBT) и полевые транзисторы с гексагональными р-областями (HEXFET®), причем биполярные транзисторы с изолированным затвором обычно выполнены с возможностью переключения при повышенных напряжениях, а полевые транзисторы с гексагональными р-областями выполнены с возможностью переключения на повышенных частотах, например, на частотах до десятков МГц.
[0044] Создание систематического способа определения оптимальной формы такого сигнала в режиме реального времени при перемещении и вращении катушек относительно друг друга, представляет собой одну из задач, достигнутых способами, описанными ниже.
ИДЕНТИФИКАЦИЯ НЕЛИНЕЙНОЙ СИСТЕМЫ
[0045] По меньшей мере в некоторых из вариантов реализации, описанных в настоящей заявке, используется идентификация нелинейной системы для достижения результатов, которые достигнуты. Таким образом, перед обсуждением подробностей различных вариантов реализации сначала будет представлен краткий обзор идентификации нелинейной системы.
[0046] Как известно из теоремы Фреше, любая стационарная по времени нелинейная динамическая система с конечной памятью может быть представлена с произвольной точностью рядами Вольтерра конечного порядка для всех входных сигналов, которые являются квадратично интегрируемыми в конечном интервале. Ряд Вольтерра подобен ряду Тейлора, за исключением того, что он может учитывать эффекты "памяти" устройств, таких как конденсаторы и катушки индуктивности. Ряд Вольтерра, который представляет собой функциональное расширение динамического нелинейного стационарного по времени оператора, является бесконечной суммой многомерных сверточных интегралов следующей формы:
 .
.
[0047] С рядом Вольтерра тесно связан ряд Винера. В ряду Винера члены ортогонализированы для чисто случайного входного сигнала белого шума и легко идентифицируются с использованием, например, способов взаимной корреляции.
[0048] Коренберг (в Parallel Cascade Identification and Kernel Estimation for Nonlinear Systems, Annals of Biomedical Engineering, vol. 19, pp. 429-55 (1990)) расширил вышеуказанную теорему Фреше, доказав, что любая система с конечной памятью и дискретным временем, которая может быть представлена конечным рядом Вольтерра, также может быть представлена конечным рядом параллельных каскадов динамической линейной системы, сопровождаемой статической нелинейностью (т.е., каскадом систем Винера или систем натуральных логарифмов).
[0049] Одним примером модели динамической системы является винеровская система, показанная на фиг. 6. В такой системе динамическая линейная система, обозначенная как h(т), сопровождается статической нелинейной системой, обозначенной как  . Она также упоминается как LN (линейно-нелинейная) система. Динамическая линейная система должна быть неподвижной (стационарной по времени), устойчивой и безынерционной (не должна иметь память). Она отображает весь возможный и приемлемый набор входных функций по времени x(t) в выходную функцию по времени u(t). Статическая нелинейность отображает диапазон приемлемых действительных значений "u(t)" в действительные значения "y(t)" в пределах диапазона указанной функции. Эти два компонента, т.е. динамическая линейная часть и статическая нелинейность, могут быть представлены параметрически или непараметрически. Как правило, параметрическое представление охватывает некоторый тип символического выражения, включая параметры а0, a1, … аn. Например, для представления статической нелинейности может быть использован многочлен, такой как приведенный ниже:
. Она также упоминается как LN (линейно-нелинейная) система. Динамическая линейная система должна быть неподвижной (стационарной по времени), устойчивой и безынерционной (не должна иметь память). Она отображает весь возможный и приемлемый набор входных функций по времени x(t) в выходную функцию по времени u(t). Статическая нелинейность отображает диапазон приемлемых действительных значений "u(t)" в действительные значения "y(t)" в пределах диапазона указанной функции. Эти два компонента, т.е. динамическая линейная часть и статическая нелинейность, могут быть представлены параметрически или непараметрически. Как правило, параметрическое представление охватывает некоторый тип символического выражения, включая параметры а0, a1, … аn. Например, для представления статической нелинейности может быть использован многочлен, такой как приведенный ниже:
 .
.
[0050] Винеровские системы представляют собой случаи класса моделей, известных как каскад или блочно-структурированные системы. Другие случаи каскада или блочно-структурированных систем включают: системы Гаммерштейна, такие как показанная на фиг. 7, в которых динамическая линейная система следует за статической нелинейной системой (NL, т.е. нелинейно-линейная система); и каскадные системы, в которых линейная система сопровождается нелинейностью и, затем, другой линейной системой (LNL).
[0051] Известны несколько способов идентификации системы, причем некоторые из них являются весьма общими, другие являются более конкретными и основаны на некоторых допущениях о свойствах входной функции, примененной к системе. Они также могут зависеть от пространства, в котором используется модель. Один из самых общих способов идентификации нелинейной системы включает выражение функции, дающей ошибку в предполагаемой модели. С использованием параметрического представления системы, для нахождения параметров, которые минимизируют интеграл вероятности ошибки, может быть использован нелинейный способ минимизации, такой как метод Левенберга-Марквардта. Этот подход является общим и понятным для осуществления, но неэффективным в вычислительном отношении по сравнению с другими способами.
[0052] Для случая непараметрической формы модели Винера (LN) чрезвычайно эффективные способы были разработаны Коренбергом и Хантером. Они также разработали эффективные способы идентифицирования систем Гаммерштейна (NL). Такие способы описаны у Хантера и др., (The Identification of nonlinear Biological Systems: Wiener and Hammerstein Cascade Models, Biological Cybernetics, vol. 55 pp.135-44 (1986)). Они же разработали практические и эффективные способы идентифицирования параллельного каскада линейной системы, сопровождаемой статической нелинейностью и другой линейной системой, (LNL), как описано, например, у Коренберга и др., (The Identification of Nonlinear Biological Systems: LNL Cascade Models, Biological Cybernetics, vol. 55, pp.125-34, (1986)). В этих источниках показано, что каждая непрерывная система с дискретным временем с конечной памятью может быть однородно аппроксимирована конечной суммой систем LNL.
[0053] Непараметрические функции, осуществленные в цифровой форме, в конечном счете могут быть представлены как выборочные функции, которые включают очень большое количество числовых значений. Таким образом, зачастую эти функции выборочных данных преобразовывают в параметрическую форму. Таким образом, сохраняется эффективность вычисления, и окончательное представление является более простым. Во многих случаях после проверки импульсной характеристики может быть оценен порядок системы, и после согласования упрощенной модели пониженного порядка импульсная характеристика, наконец, является отфильтрованной и менее зашумленной.
[0054] Дополнительное объяснение использования идентификации нелинейной системы, в частности, в отношении ядер Винера и Вольтерра, также может найдено в следующих ссылках: Коренберг, и др., "Exact Orthogonal Kernel Estimation From Finite Data Records: Extending Wiener's Identification Of Nonlinear Systems", Annals of Biomedical Engineering, vol. 16, pp. 201-14 (1988); Коренберг и др., "The Identification of Nonlinear Biological Systems: Wiener Kernel Approaches", Annals of Biomedical Engineering, vol. 18, pp.629-54 (1990); и Коренберг, и др., "The Identification of Nonlinear Biological Systems: Volterra Kernel Approaches", Annals of Biomedical Engineering, vol. 24, pp. 250-68 (1996). Дополнительные подробности также могут быть найдены в публикации патентной заявки США №2012/0098481, поименованной "Устройство и способ быстрой зарядки батарей", поданной Ian W. Hunter и Serge R. Lafontaine, содержание которой полностью включено в настоящую заявку посредством ссылки.
[0055] Следует отметить, что система с гистерезисом поддается параметрическому подходу, но в то же время не допускает применения к ней вышеуказанных разработанных Коренбергом и Хантером быстрых способов идентификации структурированных блоков. Как указано выше, в случае параметрического подхода может быть использован метод Левенберга-Марквардта для выяснения параметров, которые минимизируют интеграл вероятности ошибки, например, разность между предполагаемым выходом Винера и действительным выходом системы.
[0056] Следует понимать, что вышеуказанные способы могут быть использованы в необходимых случаях для выполнения идентификации нелинейной системы, описанной в настоящей заявке.
ПРИМЕНЕНИЕ ИДЕНТИФИКАЦИИ НЕЛИНЕЙНОЙ СИСТЕМЫ К БЕСПРОВОДНОЙ ПЕРЕДАЧЕ ЭНЕРГИИ
[0057] В описанных в настоящей заявке вариантах реализации идентификация нелинейной системы с использованием указанных выше способов применяется для усовершенствования беспроводной передачи энергии и ускорения зарядки для регулирования параметров мощного сигнала, поданного в передающую катушку для: обнаружения положения, когда приемная катушка находится достаточно близко для начала передачи энергии; автоматического регулирования частоты при перемещении приемной катушки; регулирования волновой формы сигнала, используемой для передачи энергии; и обнаружения положения, когда посторонний объект препятствует передаче энергии.
[0058] Ниже подробно описаны различные варианты реализации, которые осуществляют эти функции.
[0059] Как показано на фиг. 8, пример системы, в которой могут быть осуществлены различные варианты реализации, содержит беспроводную систему 10 для передачи энергии и приемную систему 50. В зависимости от необходимого случая применения передающая система может быть расположена на платформе 11, которая может быть неподвижной платформой, или которая может быть подвижной платформой, такой как транспортное средство или колесо на транспортном средстве. Приемная система расположена на подвижной платформе 51 (например, электрическом транспортном средстве или колесе на транспортном средстве), которое содержит заряжаемый батарейный блок 56 для того хранения энергии для управления оборудованием на подвижной платформе, например, электродвигателем.
[0060] Передающая система содержит передающую катушку 12, посредством которой энергия беспроводным способом передается приемной системе путем резонансного индуктивного заряжания (RIC). Передающая система также содержит схему 14 для передатчика энергии, управляющую передающей катушкой, электронное управляющее устройство 16 для передатчика энергии, управляющее схемой 14 для передатчика энергии и выполняющее функции, которые будут описаны ниже, систему 18 источника питания для подачи энергии в передающую катушку 12 и питания различных других электрических компонентов, а также датчик и схему 20 для измерения, выполненную с возможностью измерения и регистрации сигналов электрического тока и напряжения в передающей катушке 12.
[0061] Электронное управляющее устройство содержит процессорную систему 24 (содержащую один или большее количество процессоров) для запуска алгоритмов, которые описаны в настоящей заявке, для исполнения кода для управления схемой передатчика энергии и для выполнения других функций, относящихся к передающей энергию системе. Оно также содержит запоминающее устройство (ОЗУ и ПЗУ) 26 для сохранения кода, который исполняется процессорной системой 24, включая код, соответствующий функциям описанных в настоящей заявке алгоритмов, а также для сохранения данных, используемых процессорной системой 24, и данных, генерируемых процессорной системой 24 в ходе реализации описанных в настоящей заявке алгоритмов. Оно также содержит накопитель 28 на жестких дисках, соединенный с процессорной системой, к которому процессорная система 24 имеет доступ. Жесткий диск образует читаемое компьютером, цифровое хранилище для программ, загружаемых в ОЗУ, которые исполняются процессором для осуществления описанных в настоящей заявке алгоритмов.
[0062] Приемная система 50 содержит приемную катушку 52, посредством которой система принимает энергию, переданную беспроводным способом посредством передающей катушки 12. Система также содержит перезаряжаемый батарейный блок 56, (содержащий, например, аккумулятор с литий-ионными ячейками) и управляющую батареей систему 54 для управления работой батарейного блока 56. Относительно описанных в настоящей заявке вариантов реализации, управляющая батареей система 54 обеспечивает зарядку батарейного блока 56, когда переданная беспроводным способом энергия принимается приемной катушка 52 от соседней передающей энергию системы.
ОБНАРУЖЕНИЕ ПРИСУТСТВИЯ ПРИЕМНОЙ СИСТЕМЫ
[0063] Обычно предпочтительно возбуждать передающие катушки только тогда, когда приемная катушка находится в положении, подходящем для приема энергии. Присутствие приемной катушки может быть обнаружено с использованием различных средств, таких как дистанционный датчик, радиометки RFID, маломощный сигнал, излученный приемной катушкой к передающей катушке на боковой частотной полосе, с использованием акустических или оптических приемопередатчиков, или с участием оператора, который нажимает кнопку. Но даже в случае использования одного из указанных способов все еще имеется потребность в подтверждении того, что обнаруженный приемник находится в надлежащем местоположении. Также возможны случаи, в которых желательным является автоматическое обнаружение присутствия катушки с санкционированным доступом, чтобы автоматически начать зарядку, когда указанная катушка находится в нужном положении.
[0064] Как показано на фиг. 2, измеренный импеданс передающей катушки значительно изменяется при перемещении приемной катушки в направлении к приемнику, и этот факт подсказывает средство для обнаружения приемной катушки. Импеданс может быть получен путем качания немодулированного синусоидального сигнала в некотором частотном диапазоне и графического отображения отношения напряжения к электрическому току в зависимости от частоты. Однако, идентификация системы предлагает усовершенствованный подход. В теории систем известно, что динамическая система отображает область допустимых временных функций в область выходных временных функций. Катушку можно рассматривать как систему, которая возбуждается изменяющимся во времени напряжением (или электрическим током) и вырабатывает временную характеристику в форме электрического тока (или напряжения). Способы идентификации стандартной непараметрической линейной системы во временной области обеспечивают модель системы в форме импульсной характеристики, которая, затем, может быть использована для вычисления реакции системы в частотной области, причем указанная реакция системы в случае передающей катушки соответствует импедансу. Такие способы описаны в следующих публично доступных ссылках: Eykhoff, P., System Identification: parameter and state estimation, Wiley, London (1974); Goodwin, G.C., Payne, R.L., Dynamic system identification: experimental design and data analysis, Academic Press, New York (1977); Graupe D, Identification of systems, Van Nostrand Reinhold, NY (1976); and Ljung, System Identification - Theory for the User, 2nd Ed., PTR Prentice Hall, (1999).
[0065] Как указано выше, теория систем также обеспечивает несколько способов идентификации нелинейной системы, обеспечивающие представления нелинейной системы, такие как ядра расширения ряда Вольтерра или блоки представления системы структурированных блоков.
[0066] При идентификации нелинейной системы линейную часть, которая соответствует обычной полной проводимости (импедансу), получают во временной области в форме импульсной характеристики, которая затем может быть отображена в частотной области с использованием известных способов (например, дискретного преобразования Фурье) для получения импедансных спектров. Нелинейные компоненты, которые являются ядрами высшего порядка в случае ряда Вольтерра или нелинейностью в случае блочно-структурированного подхода, дают сигнатуру нелинейных компонентов, таких как электронные компоненты (выпрямители и т.п.), присутствующих во вторичной катушке. Следовательно, простое присутствие нелинейных компонентов предоставляет информацию от присутствии системы, которую необходимо зарядить или напитать энергией. Однако, этого не достаточно в случаях, в которых другие системы, содержащие нелинейные компоненты обычно в форме других электронных компонентов, могут приблизиться к передатчику.
[0067] В случае, если известно, что все приемники имеют почти идентичные характеристики, система для обнаружения катушки может быть предварительно обучена, как показано на фиг. 9. Первый приемник используется в различных местоположениях и может быть испытан при различных уровнях зарядки и температурах окружающей среды. Мощный сигнал подают на передающую катушку, и идентификацию нелинейной системы используют для получения различных моделей динамической системы или их представления для каждого положения и для других необходимых параметров. Эти различные модели сохранены в базе данных для определения пространства параметров моделей. Затем, как показано на фиг. 10, осуществляют фазу обнаружения, на которой неоднократно выполняют эксперименты, включающие подачу псевдослучайного (PR) сигнала и использование идентификации нелинейной системы для моделирования результирующих динамических характеристик катушки.
[0068] Для параметризации пространства нелинейности и импедансных спектров, определяют набор оптимальных и ортогональных базисных функций с использованием способов, таких как сингулярное разложение (SVD), анализ главных компонентов (РСА), волновые пакеты или сплайны. Операторы модели разлагают на их главные компоненты, и коэффициенты, полученные таким образом, в случае превышения порога используют для указания присутствия приемной катушки. Подробное описание указанных способов приведено у Chatterjee, Anindya, An introduction to the proper orthogonal decomposition, Current Science, Vol.78, No. 7, 2000.
[0069] Ниже подробно описана работа алгоритмов, показанных на фиг. 9 и 10.
[0070] Как показано на фиг. 9, процедура для предварительного обучения электронного управляющего устройства для передатчика энергии начинается на этапе 100 с первого определения репрезентативного набора конфигураций системы, для которых будут выполнены испытания. Испытания выполняют с использованием систем, идентичных системам, на которых будет выполняться обнаружение в рабочих условиях. Репрезентативный набор конфигураций будет содержать по меньшей мере некоторый диапазон местоположений и ориентаций приемной катушки относительно передающей катушки. Кроме того, он также может содержать различные значения одного или большего количества рабочих параметров, которые, как ожидается, могут влиять на характеристики нелинейной модели. Такие рабочие параметры могут включать, например, температуру приемной системы и состояние заряда батареи, заряжаемой приемной системой. Выбор местоположений и ориентаций управляется относительными физическими отношениями, которые, как считается, действуют во время работы передатчика энергии в рабочих условиях. Например, эти физические отношения могут включать определение максимального расстояния, на котором может быть начата передача электроэнергии и, затем, дополнительное определение ближайшего расстояния при перемещении приемной катушки в направлении к передающей катушке с пошаговым нарастанием. Для построения более полного набора данных, эта процедура может быть повторена с перемещением приемной катушки в направлении к передающей катушке вдоль различные путей и для различных ориентаций приемной катушки относительно передающей катушки.
[0071] С использованием определенного таким образом набора местоположений и ориентаций на этапах 102-114 собирают и обрабатывают данные для каждой из определенных конфигураций. Эта процедура выполняется для каждой конфигурации и включает применение к передающей катушке схемы передачи электроэнергии псевдослучайного сигнала напряжения (например, сигнала напряжения белого гауссовского шума (GWN) или псевдослучайной двоичной последовательности (PRBS)), который содержит достаточную энергию для возбуждения нелинейных элементов в беспроводной приемной системе (102). Во время подачи энергии на передающую катушку на этапе 104 измеряют и регистрируют напряжение и ток в передающей катушке. Поскольку приложенная волновая форма напряжения известна, теоретически достаточным является только измерение электрического тока в передающей катушке. Однако, практически к тому времени, когда поданный сигнал напряжения достигает передающей катушки, он, вероятно, будет немного отличаться от исходного сигнала из-за влияния других элементов в схеме передачи. Таким образом, для достижения повышенного уровня точности при моделировании системы предпочтительно измерять как сигнал электрического тока, так и сигнал напряжения в передающей катушке.
[0072] После измерения сигналов тока и напряжения на этапе 106 используют известную процедуру идентификации нелинейной системы, такую как указанные выше процедуры, для согласования соответствующей модели нелинейной системы (например, модели Винера) с измеренными данными для получения оценки линейных и нелинейных волновых форм, характеризующих модель динамической системы (например, импеданс) для измеренной системы. В этом случае линейной волновой формой может быть импульсная характеристика, представляющая динамическую линейную часть (или передаточную функцию), и статической нелинейной волновой формой может быть наиболее согласованный многочлен для нелинейной статической части модели.
[0073] В описанном варианте реализации представление линейной волновой формы на этапе 108 преобразуют в частотную область путем использования соответствующего способа (например, преобразования Фурье или БПФ) для преобразования импульсной характеристики в соответствующий импедансный спектр. Вычисленный импедансный спектр наряду с соответствующей нелинейной волновой формой на этапе 110 сохраняют вместе с конкретной конфигурацией, для которой он было вычислен.
[0074] Эту последовательность этапов получения и накопления данных повторяют для всех определенных конфигураций для создания базы данных моделей динамической системы передающей/приемной системы. Иными словами, после сохранения вычисленной информации для только что завершенного испытания на этапе 112 определяют, все ли местоположения испытаны. Если необходимо испытать большее количество местоположений, приемную катушку на этапе 114 перемещают в другое местоположение или ориентацию среди определенных местоположений/ориентаций, и последовательность измерений и вычислений повторяют для новой конфигурации.
[0075] Результирующая база данных представляет пространство импедансных спектров и нелинейностей. Затем это пространство параметризуют путем определения оптимального базиса для двух наборов сохраненных волновых форм. Иными словами, это выполняют на этапе 116 для всех волновых форм импеданса и на этапе 118 для всех волновых форм нелинейности. Для достижения этого могут быть использованы любые различные известные способы. В описанном варианте реализации используют сингулярное разложение (SVD). После вычисления оптимальных наборов базисных функций для двух наборов волновых форм на этапе 120 задают уменьшенный набор базисных функций. Этот этап включает выбор поднабора оптимальных базисных функций, который является наиболее эффективным в представлении волновых форм и устранении тех базисных функций, которые имеют уменьшенную информативность в отношении представления этих волновых форм. Иными словами, этот этап включает идентификацию поднабора в наборе базисных функций, который в достаточной степени является отличительным. Способы идентификации уменьшенного набора известны из уровня техники.
[0076] С использованием систем, которые применялись для генерирования данных, также выполняют эмпирическое определение для идентификации положений и/или конфигураций приемной катушки, для которых может быть успешно инициирована беспроводная передача энергии. Эти определения обеспечивают базис для разбиения пространства моделей для идентификации областей, представляющих обнаруженный приемник, который находится в нужном положении. Для выполнения разбиения или кластеризации пространства моделей используют известные способы классификации для задания тех областей, представляющих приемник, которые находятся в пределах приемлемого расстояния для инициирования беспроводной передачи энергии.
[0077] Результатом выполнения процесса, показанного на фиг. 9, является набор обучающих данных, включающий уменьшенный набор оптимальных базисных функций. Электронные управляющие устройства для передатчика энергии используют указанные обучающие данные, включая данные, задающие модели динамической системы в пространстве моделей, и оптимальный набор базисных функций, характеризующий пространство моделей, а также пороговые критерии для классификации этого пространства, для определения нахождения приемной системы в пределах диапазона, подходящего для инициирования беспроводного заряжания. Обучающие данные сохранены в локальном запоминающем устройстве, которое является частью электронных управляющих устройств передатчика энергии и/или является доступным для них.
[0078] На фиг. 10 показан алгоритм, реализованный процессорной системой электронного управляющего устройства, регулирующего мощность передатчика. Электронное управляющее устройство, регулирующее мощность передатчика, при активации на этапе 200 для поиска приемной системы в пределах его досягаемости инициирует на этапах 202-216 контур поиска, в котором оно с повторением исследует импеданс его передающей катушки для обнаружения присутствия приемной системы. Каждый раз, когда электронное управляющее устройство входит в этот контур, оно подает на этапе 202 псевдослучайный сигнал напряжения на передающую катушку и измеряет на этапе 204 и записывает сигнал напряжения и сигнал тока в передающей катушке. Электронное управляющее устройство использует тот же самый псевдослучайный сигнал, который был использован для генерирования данных режима обучения, сохраненных в электронном управляющем устройстве, регулирующем мощность передатчика. Затем, электронное управляющее устройство использует ранее использованные процедуры идентификации нелинейной системы для согласования на этапе 206 модели Винера динамической системы (например, импеданса или адмитанса передающей катушки) с этими измеренными данными. В результате могут быть получены динамическая линейная волновая форма и статическая нелинейная волновая форма, которые представляют нелинейную модель. Поскольку сохраненные эталонные данные были представлены в частотной области в форме импедансного спектра, в противоположность представлению во временной области в форме импульсной характеристики, электронное управляющее устройство передатчика преобразует динамическую линейную волновую форму в соответствующий импедансный спектр таким образом, что он может быть сравнен с импедансным спектром, сохраненным в базе (208) данных. В этой точке результатом обработки являются импедансный спектр и нелинейная волновая форма.
[0079] С использованием уменьшенного набора базисных функций, которые были выведены для эталонных данных, электронное управляющее устройство передатчика на этапе 212 разлагает импедансный спектр на соответствующие ему базисные функции и разлагает нелинейное представление на соответствующие ему базисные функции. Результатом является набор коэффициентов, представляющих веса, приданные базисным функциям для представления волновых форм.
[0080] Затем, с использованием информации о классификации, предварительно вычисленной для пространства моделей, электронное управляющее устройство передатчика на этапе 214 определяет факт обнаружения приемной катушки, находящейся в положении, подходящем для начала беспроводной передачи энергии. Это может быть выполнено, например, путем сравнивания точек в пространстве моделей, представляющих результаты измерения электрического тока, с вычисленными областями, представляющими объекты испытаний, с использованием полученных опытным путем порогов.
[0081] Если на этапе 216 определено, что приемная катушка обнаружена в пределах диапазона, подходящего для инициирования беспроводной передачи энергии, электронное управляющее устройство на этапе 218 генерирует сигнал, вызывающий инициирование беспроводной передачи энергии. В противном случае электронное управляющее устройство передатчика повторяет описанный выше контур обнаружения (этапы 216, 202). Электронное управляющее устройство передатчика продолжает циклическое повторение указанного контура, пока не обнаружит приемную катушку, с которой может быть выполнена беспроводная передача энергии.
[0082] В подходе, описанном со ссылкой на фиг. 9 и 10, использован непрямой способ. В качестве непрямого способа, сначала получают линейную или нелинейную модель. Затем, волновые формы этих моделей разлагают с использованием соответствующих базисных функций. И только после этого параметры базисных функций могут быть использованы с применением способа классификации для получения критерия пригодности положения приемного блока.
[0083] Напротив, способы идентификации нелинейной системы также могут быть использованы для реализации прямых способов для достижения той же самой цели, такой как получение критерия близости приемного блока. В таком прямом способе используется преимущество того факта, что любой нелинейный процесс, который может быть переработан как детерминированное стационарное по времени лишенное памяти преобразование области входных функций в диапазон выходных функций, может быть представлен нелинейной системой, такой как расширение ряда Вольтерра или параллельный каскад структурированных блоков, и что указанные системы могут быть отличимы от входной функции, если во входном и выходном псевдосигналах содержится достаточная информация. Подробное описание принципов, лежащих в основе этого подхода, может быть найдено у Green и др., "Recognition of Adenosine Triphosphate Binding Sites Using Parallel Cascade System Identification", Annals of Biomedical Engineering, Vol.31, pp. 462-470, 2003 (далее указанного как Green).
[0084] На фиг. 11 и 12 показан вариант реализации, в котором использован такой подход. В показанном на чертежах варианте реализации для обнаружения приемника используется импеданс катушки. В общем, как показано на фиг. 11, собирают совокупность спектров импеданса ячейки для различных положений приемной катушки. Затем, в предположении, что каждый измеренный спектр состоит из N точек, в соответствующем положении катушки генерируют постоянный сигнал положения, который также состоит из N точек, и каждой точке измеренного спектра назначают соответствующее положение приемной катушки. Для целей идентификации системы генерируют входной сигнал путем связывания вместе импедансных спектров, и генерируют выходной сигнал путем связывания вместе сигналов положения. Затем, с использованием идентификации нелинейной системы получают для такой системы ввода-вывода нелинейную модель, такую как параллельный каскад структурированных блоков.
[0085] Затем эту модель используют, как показано на фиг. 12, в качестве оценочного алгоритма для положения приемной катушки. Для этого получают захваченный спектр для неизвестного положения катушки и используют его в качестве входного сигнала для оцененной нелинейной модели. Вычисленный выход нелинейной модели непосредственно представляет собой оценку положения приемной катушки. Как описано в Green, последнее значение выходного сигнала используют в качестве расчетного положения катушки.
[0086] Ниже подробно описаны конкретные сведения об алгоритмах, показанных на фиг. 11 и 12.
[0087] На фиг. 11 показана процедура предварительного обучения электронного управляющего устройства передатчика для обнаружения приемной катушки. Как описано выше со ссылкой на фиг. 12, процедура начинается с этапа 300, на котором впервые задают репрезентативный набор конфигураций системы, для которых будут выполнены испытания.
[0088] С использованием этого заданного набора конфигураций системы собирают и обрабатывают данные для каждой из заданных конфигураций. На этом этапе 302, выполняемом для каждой конфигурации, возбуждают передающую катушку схемы передачи электроэнергии псевдослучайным сигналом напряжения (например, сигналом напряжения белого гауссовского шума), который содержит достаточную энергию для активации нелинейных элементов в беспроводной приемной системе. Во время подачи мощности на передающую катушку на этапе 304 измеряют и регистрируют напряжение и ток в передающей катушке. После измерения сигналов тока и напряжения на этапе 306 вычисляют импедансный спектр. В описанном варианте реализации это выполняют с использованием взаимных корреляций измеренных сигналов следующим образом:
где Схх(т) - автокорреляция сигнала напряжения, Сху(т) - взаимная корреляция сигналов напряжения и тока, и  представляет быстрое преобразование Фурье (БПФ). В этом случае, результирующий вычисленный импедансный спектр представлен N точками данных.
представляет быстрое преобразование Фурье (БПФ). В этом случае, результирующий вычисленный импедансный спектр представлен N точками данных.
[0089] Разумеется, это не единственный способ вычисления импедансного спектра. Специалистам также известны другие подходы. Например, можно выполнить простое вычисление преобразования Фурье измеренных сигналов и использовать их для вычисления импедансного спектра. Однако, использование взаимных корреляций имеет преимущество, состоящее в снижении влияния шума.
[0090] Вычисленный импедансный спектр соответствует конфигурации катушки, которая представлена ориентацией или местоположением относительно передающей катушки. Этому положению катушки назначают уникальный номер (например, расстояние от передающей катушки), и на этапе 308 генерируют сигнал положения катушки, соответствующий точке N, причем каждая точка равна назначенному номеру, и на этапе 310 сигнал положения катушки сохраняют как выходной сигнал вместе с относящимся к нему импедансным спектром точки N, для которой он был вычислен.
[0091] Эту последовательность этапов 314, 312 выполняют для каждой из заданных конфигураций. После окончания результатом является база данных сохраненных вычисленных спектров и соответствующих сигналов положения катушки для всех заданных конфигураций.
[0092] После получения данных измерений для всех конфигураций на этапе 316 связываются вместе импедансные спектры для всех конфигураций для формирования входного сигнала:
Входной сигнал = {H1, Н2, … Нn}.
[0093] И все соответствующие сигналы положения на этапе 318 связывают вместе для формирования выходной сигнала:
Выходной сигнал = {P1, Р2, … Pn}.
[0094] Затем эти два сигнала обрабатывают в качестве входного и выходного сигналов гипотетической нелинейной системы. Затем на этапе 320 используют идентификацию нелинейной системы для получения нелинейной модели, такой как параллельный каскад структурированных блоков, для этой нелинейной системы. Указанную нелинейную модель сохраняют в электронном управляющем устройстве передатчика энергии, которое будет использовать ее для прямой оценки положения приемной катушки во время работы системы. Кроме того, опытным путем выполняют определение относительно того, какие положения представляют положения, в которых может быть выполнено беспроводное заряжание. И эту информацию также сохраняют для использования в электронном управляющем устройстве, регулирующем мощность передатчика.
[0095] Подробности алгоритма, реализованного электронным управляющим устройством передатчика энергии, показаны на фиг. 12. Электронное управляющее устройство передатчика энергии, активированное на этапе 400 для поиска приемной системы вблизи себя, инициирует на этапах 402-412 контур поиска, в котором оно с повторением измеряет импеданс своей передающей катушки для обнаружения присутствие приемной системы. Каждый раз, когда электронное управляющее устройство выполняет указанный контур, оно подает на этапе 402 псевдослучайный сигнал напряжения на передающую катушку (согласно другому варианту реализации с использованием того же самого псевдослучайного сигнала, который был использован для генерирования набора данных, сохраненных в электронном управляющем устройстве передатчика энергии) и на этапе 404 измеряет сигнал напряжения и сигнал тока передающей катушки. Затем, с использованием алгоритма, описанного со ссылкой на фиг. 11, электронное управляющее устройство на этапе 406 вычисляет на основании измеренных сигналов напряжения и тока импедансный спектр импедансный спектр точки N для передающей катушки. Затем, на этапе 408 электронное управляющее устройство применяет этот вычисленный импедансный спектр к нелинейной модели, которая была сгенерирована в соответствии с алгоритмом, показанным на фиг. 11. На этапе 410 результат используют в качестве индикатора положения приемной катушки. Если на этапе 412 выход нелинейной модели указывает, что приемная катушка находится в нужном положении, электронное управляющее устройство передатчика энергии на этапе 414 начинает беспроводную зарядку приемной системы. В противном случае, электронное управляющее устройство повторяет описанный выше контур из этапов 412, 402 для продолжения поиска приемной катушки, находящейся в необходимом положении для зарядки.
[0096] В вышеописанном подходе использован вычисленный импеданс. Альтернативный подход, который, вероятно, позволяет сохранить увеличенный объем информации о нелинейности в системе, состоит в использовании измеренного тока, вместо вычисления импеданса. Такой подход описан ниже со ссылкой на фиг. 18А-18В и относится к обнаружению инородного объекта.
АВТОНАСТРОЙКА ЧАСТОТЫ ПЕРЕДАТЧИКА
[0097] Описанные способы определения положения катушки предназначены для настройки схемы передачи электроэнергии на оптимальную частоту для беспроводной зарядки приемной системы. Когда катушки расположены относительно друг друга на расстоянии, которое больше чем диаметр катушки, обычно требуется незначительная настройка, поскольку оптимальная частота для передачи энергии не изменяется в значительной степени и известна этой системе. Как указано выше, дело обстоит не так, когда катушки расположены ближе друг к другу. Оптимальная частота может резко изменяться с изменением положения катушек при их сближении, Таким образом, оптимальная частота должна быть вычислена на скорости, непосредственно соответствующей скоростям сближения катушек. В этом случае, способы, основанные на идентификации системы, обеспечивают явное преимущество, состоящее в том, что необходимые импедансные спектры могут быть определены намного быстрее. Вместо процесса качания частоты, который может потребовать много времени, сигнал, содержащий все необходимые частотные компоненты, подают один раз и на основании этого разового применения вычисляют спектры.
[0098] Энергия, поступившая в первичную катушку, которая соответствует переданной энергии плюс некоторая энергия, рассеянная в непосредственно катушке в виде тепла, может быть выведена из импедансных спектров. Если система передающей катушки может быть представлена в основном как линейная система, энергия, приходящая в передающую катушку, может быть вычислена путем интегрирования напряжения и тока. Из импедансного спектра может быть получено:

где Z(ω) - величина импеданса, и ϕ(ω) - фаза.
[0099] Следовательно, в случае линейной системы оптимальная передача электроэнергии имеет место, если произведение амплитуды и косинуса фазы импеданса является максимальным. Если система отличается значительной нелинейностью, оптимальные частоты также будут зависимы от амплитуды.
[00100] В случае беспроводной системы передачи энергии (WPTS) напряжения низкого уровня могут оказаться недостаточными для возбуждения внутренней нелинейной электронной схемы, содержащей полупроводниковые устройства, и, таким образом, система останется линейной. Таким образом, имеется необходимость в доставке в катушку некоторой энергии сверх минимального количества для наблюдения нелинейности в системе. В качестве волновой формы напряжения к катушкам может быть применен случайный возбуждающий сигнал, и реакцией в этом случае является измеренный ток, протекающий в катушке.
[00101] Систему моделируют путем идентификации нелинейной системы и с использованием результирующей нелинейной модели вычисляют оптимальную частоту. В идеальном случае, процесс оценки может быть выполнен аналитическим путем. Иными словами, для представления импульсной характеристики и нелинейности или ядер высшего порядка могут быть использованы параметрические уравнения в замкнутой форме. С использованием аналитических выражений в замкнутой форме вычисление реакции системы, а также нахождение значений параметров, при которых наблюдаются экстремальные значения, может быть выполнено аналитическим путем. Для поиска оптимальных частот полученную аналитическим путем реакцию, представляющую энергию катушки как функцию частоты, выводят для синусоидальных волновых форм входного напряжения, дифференцированных для решения в точках экстремумов (резонансных частот), и выбирают точки экстремумов (резонансные частоты), которые соответствуют максимальным значениям.
[00102] Однако, аналитические представления могут стать слишком сложными для обращения с ними или их решения. В этом случае могут быть использованы численные методы. Для быстрого определения оптимальной частоты может быть реализован способ оптимизации вдоль линии (оси частот). Такие способы описаны в следующих источниках: Fletcher, R. Practical Methods of Optimization, Second Edition, John Wiley & Sons, LTD, 1987; Press, W.H. et al., Numerical Recipes in С++, Cambridge University Press, 2002; Nocedal, J. and Wright, S.J., Numerical Optimization, Springer Series in Operations Research, 1999; and Press, William H. et al., Numerical Recipes 3rd Edition: The Art of Scientific Computing, Cambridge University Press, 3rd Ed., (2007). В этой связи, реакцию нелинейной системы моделируют в численной форме, и переданную энергию используют в качестве целевой функции, которая является максимизированной. Тот же самый подход может быть использован для полуаналитических представлений, в которых непараметрические функции могут быть аппроксимированы путем разложение в ряд Чебышева.
[00103] Пример алгоритма, использующего такой подход для автоматической настройки частоты катушки, представлен на фиг.13. Этот алгоритм реализован посредством электронного управляющего устройства для передатчика энергии. В общем, нелинейные модели непрерывно вырабатываются путем повторного применения псевдослучайных возмущений напряжения, выборочным измерением напряжения и тока катушки и согласованием нелинейной модели с измеренными данными. Затем указанные нелинейные модели используют для имитации в цифровой форме энергии, приходящей в катушку, в зависимости от частоты сигнала. И алгоритм поиска используют для поиска частот, на которых должна быть вычислена энергия, и итеративного определения оптимальной частоты.
[00104] Как показано на фиг. 13, если приемная катушка определена как находящаяся в пределах расстояния, на котором может быть успешно осуществлена ее зарядка, электронное управляющее устройство для передатчика энергии задает частоту беспроводной зарядки, равную заданной частоте F0, которая соответствует вычисленной резонансной частоте заряжающей системы, и на этапе 500 начинает зарядку беспроводным способом на этой частоте. Затем электронное управляющее устройство входит в контур, в котором оно ищет оптимальную частоту зарядки. При поиске оптимальной частоты электронное управляющее устройство использует идентификацию нелинейной системы для выполнения нелинейной модели приемной системы передатчика и затем применяет ту модель для нахождения оптимальной частоты. Построение модели осуществляют способом, подобным тому, который описан выше в связи с процессом обнаружения присутствия приемной катушки. Электронное управляющее устройство на этапе 502 подает на передающую катушку псевдослучайный сигнал напряжения в качестве возмущающего сигнала и на этапе 504 измеряет сигналы напряжения и тока в передающей катушке. Затем электронное управляющее устройство на этапе 506 использует идентификацию нелинейной системы для согласования этих измеренных данных с моделью Винера представления динамической системы (например, импеданса) передающей катушки. После выведения модели Винера электронное управляющее устройство входит в контур, составленный этапами 508-516, в котором оно использует эту нелинейную модель для поиска оптимальной частоты. В частности, электронное управляющее устройство на этапе 508 моделирует реакцию нелинейной модели на сигнал напряжения на предварительно выбранной частоте. На основании смоделированной реакции электронное управляющее устройство на этапе 510 вычисляет переданную энергию в качестве целевой функции, которая должна быть максимизирована. Затем, электронное управляющее устройство на этапе 512 использует известный способ минимизации градиента для поиска новой частоты, на которой переданная энергия является максимальной (512). Во время этого поиска оптимальной частоты электронное управляющее устройство использует нелинейную модель для повторного моделирования реакции, каждый раз изменяя значения частоты возбуждающего сигнала, пока не будет найден очевидный оптимум. После нахождения очевидной оптимальной частоты электронное управляющее устройство на этапе 514 выполняет проверку, действительно ли эта новая частота является оптимумом.
[00105] Если на этапе 516 определено, что оптимальная частота еще не найдена, электронное управляющее устройство повторяет процедуру для продолжения поиска оптимальной частоты. Иными словами, электронное управляющее устройство на этапе 508 моделирует реакцию нелинейной модели на новую частоту, на этапе 510 вычисляет целевую функцию на этой новой частоте и на этапе 512 использует способ минимизации градиента для поиска новой частоты, на которой целевая функция максимизирована. Электронное управляющее устройство повторяет этот процесс до тех пор, пока не будет найдена оптимальная частота, и после ее нахождения электронное управляющее устройство на этапе 518 задает частоту передающей катушки, равную этой оптимальной частоте.
[00106] После задания частоты возбуждающего сигнала, равной вычисленной оптимальной частоте, электронное управляющее устройство на этапе 520 определяет, завершена ли зарядка. Электронное управляющее устройство может определить это путем обнаружения резкого изменения импеданса приемной катушки, когда приемная система прекращает или выключает зарядку батарейного блока. Согласно другому варианту реализации, если имеется коммуникационный канал назад к передающей системе, приемная система может передать по этому каналу сигнал, сообщающий передающей системе о том, что функция зарядки завершена. Когда электронное управляющее устройство на этапе 520 обнаруживает, что зарядка завершена, оно на этапе 522 выключает подачу энергии и, таким образом, завершает беспроводную передачу энергии в систему приемной катушки.
[00107] Если зарядка не завершена, возможна ситуация, когда относительные положения передающей и приемной катушек изменяются и, таким образом, влияют на значение оптимальной частоты, в результате чего возобновляется поиск новой оптимальной частоты. Иными словами, управление способом возвращается назад к началу алгоритма на этап 502 для продолжения поиска.
[00108] До этого момента предполагалось, что беспроводная приемная система не передает данные о переданной энергии назад беспроводной передающей системе. Однако, если данные могут быть переданы от приемной системы к передающей системе, нелинейная модель может быть выведена на основании напряжения V(t), приложенного к катушке, и энергии P(t), поступающей непосредственно в блок для хранения энергии, такой как батарея. Затем, эту нелинейную модель используют, как описано выше, для определения точной частоты, при которой максимальное количество энергии поступает непосредственно в подсистему для хранения энергии, а не в катушки, что означает потери энергии в катушках и электронной схеме для передачи энергии. Кроме того, также может быть вычислена эффективность, в результате чего может быть обеспечена возможность выбора между максимальной скоростью зарядки и максимальной эффективной скоростью зарядки.
[00109] В качестве альтернативного и более эффективного способа автоматической настройки на оптимальную частоту возбуждения может быть использован прямой способ, основанный на описанном выше в Green методе. В этом случае алгоритм обнаружения в форме нелинейной модели сначала получают в автономном режиме работы. Это осуществляют путем выполнения в реальной системе ряда экспериментов с передающей и приемной катушками в различных положениях и ориентациях относительно друг друга. Для каждого местоположения/ориентации определяют оптимальную частоту катушки и регистрируют соответствующий ток катушки. С учетом того, что этот процесс выполняют в автономном режиме, оптимальная частота для каждого условия может быть получена в цифровой форме или экспериментально, или то и другое вместе.
[00110] После выполнения всех испытания и получения результатов этих испытаний формируют входной и выходной сигналы с целью идентификации нелинейной системы. Входной сигнал формируют путем связывания всех измеренных реакций сигнала тока на случайный возбуждающий сигнал. Выходной сигнал формируют путем связывания оптимальных значений частоты, соответствующих указанным связанным сигналам тока. После этого выполняют идентификацию нелинейной системы, чтобы вывести из указанных сформированных входного и выходного сигналов нелинейный алгоритм для оценки оптимальной частоты, который является нелинейной моделью, показывающей каким образом различные ответные сигналы отображаются в соответствующие оптимальные частоты.
[00111] Затем электронное управляющее устройство передатчика энергии использует в режиме реального времени полученный нелинейный алгоритм для оценки оптимальной частоты чтобы извлечь непосредственно из сигнала реакции указанную оптимальную частоту возбуждения для последующего использования. Для этого подают псевдослучайный возбуждающий сигнал, который обычно является тем же самым, что и псевдослучайный сигнал, используемый для получения нелинейного оценочного алгоритма, и используют сигнал реакции, вызванной этим возбуждающим сигналом, в качестве входного сигнала в нелинейном алгоритме для оценки оптимальной частоты. Выходной сигнал оценочного алгоритма идентифицирует оптимальную частоту для беспроводной передачи энергии при существующих условиях.
[00112] Более подробная иллюстрация этого прямого способа показана на фиг. 14А и 14В. Имеется автономная часть (показанная на фиг. 14А) и часть, выполняемая в режиме реального времени (показанная на фиг. 14В). Автономную часть выполняют с использованием оборудования, идентичного оборудованию, посредством которого реализуют часть способа, выполняемую в режиме реального времени. Это сделано с целью построения нелинейной модели, которая может быть использована в качестве оценочного алгоритма.
[00113] Как показано на фиг. 14А, для автономной части определение на этапе 600 выполняют исходя из диапазона условий, которые необходимо смоделировать. Диапазон условий отражает различные местоположения и ориентации катушек относительно друг друга, для которых будет выполнена автонастройка в режиме реального времени. Эксперименты должны выполняться в автономном режиме для каждого из указанных различных условий. Эксперименты также могут быть выполнены с различными объектами, которые могут присутствовать в энергетическом поле и которые могут воздействовать на беспроводную передачу энергии. Такими объектами могут быть, например, экранирующие материалы, такие как металлические листы или металлические трубы, расположенные на различных расстояниях от катушек. Иными словами, задача состоит в том, чтобы воспроизвести реальные условия, в которых, вероятно, будет использоваться беспроводная передача энергии. После задания диапазона возможных условий автономный процесс включает выполнение на этапе 602 последовательности испытаний для каждого из указанных различных условий.
[00114] Во-первых, на этапе 604 определяют оптимальную частоту катушки для максимизации передачи энергии. Поскольку это определение выполняется в автономном режиме, оно может быть численным или экспериментальным. Затем, на этапе 606 псевдослучайный возмущающий сигнал напряжения подают на передающую катушку и измеряют и записывают ток катушки, соответствующий указанному сигналу напряжения. Также на этапе 608 определяют и сохраняют сигнал постоянной частоты со значением, равным соответствующей оптимальной частоте, вместе с записанным сигналом тока.
[00115] Эту последовательность этапов повторяют на этапе 610 для всех условий, которые должны быть смоделированы.
[00116] После получения данных измерений для всех условий входной и выходной сигналы для нелинейной модели сформированы способом, подобным тому, который был описан выше со ссылкой на фиг. 11. Записанные сигналы тока для всех условий на этапе 612 связываются вместе для формирования входного сигнала. И на этапе 614 все соответствующие частотные сигналы связывают вместе для формирования выходного сигнала. Затем, на этапе 616 связанные входной и выходной сигналы обрабатывают в качестве входного и выходного сигналов нелинейной системы и идентификацию нелинейной системы используют для получения нелинейной модели, такой как параллельный каскад структурированных блоков, этой нелинейной системы. Результирующая нелинейная модель, которая представляет собой алгоритм для оценки частоты, будет использоваться в режиме реального времени в электронном управляющем устройстве передатчика энергии для определения оптимальной частоты для беспроводной передачи энергии.
[00117] Алгоритм, показанный на фиг. 14В, представляет последовательность этапов, которые выполняют посредством электронного управляющего устройства для передатчика энергии. Электронное управляющее устройство подает на этапе 618 псевдослучайный сигнал напряжения на передающую катушку и регистрирует сигнал тока, выработанный передающей катушкой. Затем, электронное управляющее устройство на этапе 620 использует записанный сигнал тока в качестве входного сигнала для нелинейного оценивающего частоту алгоритма, который был вычислен в автономном режиме. Окончательным результатом оценочного алгоритма является оптимальная частота для выполнения передачи электроэнергии при существующих условиях, т.е., текущих положении и ориентации данных двух катушек относительно друг друга. Электронное управляющее устройство на этапе 622 задает частоту схемы передачи электроэнергии, равную этой частоте. В этой точке на этапе 624 электронное управляющее устройство проверяет, завершена ли зарядка. Если зарядка завершена, на этапе 626 энергия отключается, и беспроводная передача энергии завершается, или устанавливается флаг, который вызывает завершение или прекращение передачи электроэнергии.
[00118] Если зарядка не завершена, электронное управляющее устройство повторяет только что описанную последовательность этапов 618-624 для учета любых возможных изменений в положении передающей катушки относительно приемной катушки или других ожидаемых изменений условий. Иными словами, автонастраивающийся процесс происходит непрерывно в течение работы системы для беспроводной передачи энергии.
[00119] Следует отметить, что описанный выше алгоритм включает зарядку с одновременной подачей псевдослучайного сигнала в систему. Согласно другому подходу, который способствует снижению помех в выходном сигнале, зарядка чередуется с проверкой. В этом случае, псевдослучайный сигнал подают только при отсутствии возбуждающего сигнала.
НАСТРОЙКА ВОЛНОВОЙ ФОРМЫ ПЕРЕДАТЧИКА ДЛЯ ОПТИМАЛЬНОЙ ПЕРЕДАЧИ
[00120] Теоретически, сигналы напряжения и тока, протекающие в саморезонансных катушках, обычно являются синусоидальными, при условии, что физические свойства генераторов таковы, что они отфильтровывают большую часть других волновых форм. Однако, на практике выяснилось, что более высокая эффективность передачи электроэнергии иногда может быть достигнута с использованием формы сигналов, немного отличающейся от волновой формы. Ввиду того факта, что в современных электронных схемах для генерирования мощных сигналов в основном используются не аналоговые генераторы, а переключающие системы, управляемые цифровым способом, электронная схема предоставляет возможность создания почти любой произвольной волновой формы.
[00121] Регулирование волновой формы становится возможным после получения нелинейной модели, описывающей беспроводную передачу энергии. Благодаря нелинейной модели может быть использован существующий нелинейный эталонный алгоритм для получения усовершенствованной волновой формы. Учитывая, что общего решения не существует, динамические свойства системы линеаризуются вокруг траектории в пространстве состояний. Итеративным способом и с использованием существующей теории линейного управления, повторно вычисляют волновую форму оптимального управления, и система повторно линеаризуется вокруг новой траектории, пока не будет достигнуто схождение.
[00122] Согласно другому варианту реализации для вычисления оптимальной волновой формы напряжения может быть использован численный способ. Такой способ показан на фиг. 15. В этой блок-схеме волновая форма представлена как конечный ряд, такой как усеченный ряд Фурье или сумма полиномов Чебышева. Для усеченного ряда Фурье напряжение может быть представлено как:
 ,
,
где ω0 - собственная угловая частота. Для существования оптимума быть определены некоторые ограничения в форме границ для напряжения V(t) или в точках, где мощность Р0 сигнала является фиксированной и фаза собственной частоты предполагается равной нулю:
 ,
,
φ0=0.
[00123] Затем, для нахождения неизвестных параметров Сk и ϕk используют численный способ оптимизации, такой как процедура оптимизации Левенберга-Марквардта, с линейными и нелинейными ограничениями.
[00124] Если выяснилось, что оптимальную волновую форму необходимо отрегулировать в соответствии с положением приемной катушки или по причине изменений уровня сохраненной в приемнике энергии, тот же самый способ может быть использован итерационно в режиме реального времени одновременно с перемещением приемника.
[00125] На фиг. 15 подробно представлен пример алгоритма для нахождения оптимальной волновой формы для передачи электроэнергии. В целом, эта процедура включает на этапе 700 первое получение нелинейной модели. Затем, с использованием этой нелинейной модель для моделирования энергии в катушке используют способ оптимизации для определения наилучшей волновой формы.
[00126] Нелинейная модель для передающей и приемной систем может быть получена, как описано выше. Не смотря на то, что это может быть выполнено в режиме реального времени с использованием заданных системы для беспроводной зарядки, в целом, в этом случае оптимальная волновая форма не изменяется в значительной мере между различными вариантами реализации системы. Таким образом, определение оптимальной волновой формы сигнала может быть осуществлено в автономном режиме перед процессом заряжания.
[00127] После получения указанной нелинейной модели параметры для представления конечного ряда волновой формы напряжения, которая была описана выше, инициализируют на этапе 702 таким образом, что волновая форма представляет собой чистую синусоиду. Таким образом, параметр С0 устанавливают равным напряжению V0, амплитуду приложенного сигнала напряжения и фазу ϕ0 устанавливают равными нулю, как и все другие параметры Сk и ϕk. Кроме того, различные параметры для алгоритма оптимизации, которые предстоит использовать, также инициализируются на этапе 704 при подготовке к началу оптимизационного поиска.
[00128] После завершения инициализации процессорная система, на которой выполнялась инициализация, начинает выполнять алгоритм оптимизации, состоящий из этапов 706-718. Этот алгоритм включает указанную последовательность этапов, которые повторяются, пока не будет найдет набор значений параметров Сk и ϕk, который обеспечивает максимизацию целевой функции, а именно, выходную мощность передающей катушки. Процессор использует полученную нелинейную модель для моделирования на этапе 706 волновой формы тока, которая является результатом возбуждения системы выбранной волновой формой напряжения. Затем процессор на этапе 708 вычисляет выходную мощность для передающей катушки и устанавливает целевую функцию, равную этой вычисленной выходной мощности. Затем, на этапе 712 процессор вызывает известную процедуру нелинейной минимизации для нахождения набора значений параметров, который максимизирует выходную мощность. Во время этого поиска оптимальной волновой формы электронное управляющее устройство использует нелинейную модель для повторяющегося моделирования волновой формы тока, каждый раз изменяя значения параметров Ck и ϕk для возбуждающего сигнала, пока не будет найден очевидный оптимум.
[00129] После поиска набора значений параметров, который максимизирует выходную мощность, процессор на этапе 714 обновляет сигнал напряжения с использованием указанных новых параметров и на этапе 716 проверяет, найден ли оптимум. Если на этапе 718 определено, что оптимум не найден, управление способом возвращается назад к началу контура оптимизации, и процессор повторяет вычисления для нахождения наилучшего набора значений.
[00130] После нахождения оптимального набора значений процессор на этапе 720 сохраняет эти значения для использования в электронном управляющем устройстве передатчика энергии.
[00131] Если между приемником и передатчиком существует подходящий коммуникационный канал, и имеется возможность получения сигнала о фактической энергии, поступающей в хранилище энергии, алгоритм может быть выполнен с возможностью непосредственного предсказания сохраненной энергии с последующим регулированием входной волновой формы для оптимизации сохраненной энергии.
ОБНАРУЖЕНИЕ ПРИСУТСТВИЯ ИНОРОДНЫХ ОБЪЕКТОВ
[00132] Обнаружение инородных объектов рядом с мощными катушками является необходимым как в целях безопасности, так и для повышения эффективности. При условии относительно низких частот, используемых для передачи энергии, и при условии передачи энергии посредством индуктивной связи с уменьшенным электромагнитным излучением, генерируемым катушками, способ резонансного индуктивного заряжания (RIC) изначально более безопасен, чем большая часть других беспроводных способов передачи энергии, в частности тех, в которых используют микроволны или свет.
[00133] Объекты, которые не препятствуют распространению магнитного поля, вряд ли являются причиной беспокойства с точки зрения безопасности или помехи для системы беспроводного заряжания. Если необходимо обнаружить такие объекты, должны быть использованы другие средства, такие как оптические, механические или акустические способы.
[00134] Предметом повышенного внимания являются электрически проводящие объекты, такие как металлические части, материал на основе углеродного волокна или даже живая ткань. Если в магнитном поле присутствует такой объект, в нем могут генерироваться сильные вихревые токи, вызывающие потерю передаваемой энергии, локальный нагрев объекта и потенциальный вред или даже необратимые повреждение клеток тканей тела у людей. При передаче энергии мощностью порядка сотен киловатт омический нагрев может вызвать повышение температуры инородных объектов выше 50°C и, как результат, ожоги кожи. После достижения уровней мощности в сотни киловатт возникает опасность для жизни при длительном контакте с силовым полем, в частности, для людей, использующих кардиостимуляторы. Таким образом, имеется необходимость обнаружения проводящих объектов, включая живую ткань, находящихся вблизи передающей катушки.
[00135] С этой целью могут быть использованы датчики близости и оптические способы обнаружения. Известны способы обнаружения присутствия инородных объектов, основанные на моделях определения внезапных потерь мощности. Они описаны, например, у Kuyvenhoven, Ν., Dean, С, Melton, J., Schwannecke, J., and Umenei, A.E., "Development of a Foreign Object Detection and Analysis Method for Wireless Power Systems," IEEE, Wireless Power Consortium (2011). Если подсистема приемной катушки имеет связь с подсистемой передатчика, она может сообщить передатчику о количестве принятой энергии. Электронное управляющее устройство в подсистеме передатчика может вычислить потери на основании известного количества энергии, доставленной в катушки. И если количество потерянной энергии превышает заданный порог, передача энергии может быть прекращена.
[00136] Однако более практичным является обнаружение таких объектов непосредственно на основании изменений, которые они вызывают в полях, воспринимаемых катушками. Как описано в настоящей заявке, путем непрерывной оценки нелинейной динамической реакции передающей катушки инородный объект может быть обнаружен на основании вносимых им изменений в динамические свойства передатчика. Нелинейность имеет тенденцию возникновения в основном в системе электронной схемы приемника. С меньше вероятностью нелинейность возникает в металлических или других электрически проводящих системах, таких как биологические ткани, которые не проявляют насыщения.
[00137] Кроме того, типичные электрические компоненты реагируют линейно на присутствие электрического поля, и в частотной области графики Боде их импеданса изображены прямыми линиями с целочисленными наклонами в дважды логарифмическом графике. Кроме того, фаза линейно связана с наклоном импедансной линии на графике зависимости от частоты, и система ведет себя как минимально-фазовая. В случае живой ткани обычно наклон не является целочисленным, и ткань не реагирует как минимально-фазовая система. Таким образом, различные инородные объекты, в частности, имеющие сложную структуру или большую распределенную массу, в основном влияют на линейную часть нелинейной системы весьма характерным образом.
[00138] Система для обнаружения в электронном управляющем устройстве передатчика энергии может быть обучена для материалов различных типов таким образом, что она может обнаруживать на основании изменений в линейных и нелинейных компонентах системы катушки присутствие инородного объекта вблизи передающей катушки. Во-первых, большой набор нелинейных моделей идентифицируют и сохраняют в базе данных в качестве представителей типичных объектов, металлических или искусственных тканей, подлежащих обнаружению. Затем, эти модели классифицируют с использованием известных математических способов, таких как нейронные сети, анализ главных компонентов (РСА) или сингулярное разложение (SVD). Анализ главных компонентов и сингулярное разложение могут быть использованы для задания оптимального базиса для представления моделей, из которых получают чрезвычайно сокращенное представление пространства моделей, которое используют для обнаружения.
[00139] С учетом того, что различные объекты воздействуют на линейные и/или нелинейные компоненты нелинейных моделей различным образом, их уникальные характеристики могут быть изолированы в различных компонентах оптимальных базисных функций. Таким образом, если объект, такой как человек, окажется вблизи беспроводной системы передачи, то конкретные компоненты системы отразятся в коэффициентах, относящихся к ее конкретным базисным функциям, и станут обнаруживаемыми на основании значений этих коэффициентов. В таком случае, достаточно наблюдать характеристические коэффициенты видов человека или животных для определения кто именно - человек или животное - находится рядом с катушкой. Согласно другому варианту реализации пространство может быть разделено на области, которые характеризуют каждый интересующий объект. Затем, когда модель перемещается в направлении к границам ее кластерного пространства или от этих границ, система дает указание о присутствии инородных объектов.
[00140] На фиг. 16А и 16В показана реализация алгоритма обучения для одной такой системы. В общем, для сбора большого количества моделей динамической системы для различных типов объектов в различных местоположениях относительно передающей катушки используется идентификация нелинейной системы. После сбора данных для указанных объектов выводят оптимальные базисные функции с использованием разложения SVD. Затем, режимы, которые в основном являются репрезентативными для каждого типа объекта, изолируют в пространстве моделей путем определения, какие режимы имеют существенные компоненты, уникальные для объекта этого типа.
[00141] На фиг. 17 показано, как происходит обнаружение в рабочих условиях с использованием информации, собранной из алгоритма обучения. В общем, исходные данные поступают непрерывно, и из этих исходных данных непрерывно выводятся нелинейные модели. Каждый раз, когда получается новая модель, ее разлагают на ее оптимальные базисные коэффициенты. Затем, для каждого репрезентативного типа интересующего объекта в базе данных, когда соответствующие коэффициенты режима превышают заданный порог, вырабатывается сигнал о вероятном присутствии объекта этого типа, и беспроводная передача энергии прерывается, или вырабатывается сигнал тревоги.
[00142] Ниже приведено подробное описание вариантов реализации, показанных на фиг. 16А, 16В и 17.
[00143] Как показано на фиг. 16А, построение базы данных (или предварительное обучение) для обнаружения инородного объекта включает ряд этапов, которые подобны этапам, выполняемым для обнаружения присутствия приемника, как показано на фиг. 9. Способ начинается на этапе 800, на котором идентифицируют и собирают коллекцию объектов, которые необходимо обнаружить. Таким образом, например, поскольку необходимо завершать процесс зарядки, когда человек или животное входят в поле действия беспроводной передачи энергии, объекты, представляющие ткани человека и животных должны находиться в собранной коллекции объектов. Поскольку также необходимо обнаруживать присутствие объектов, которые могут препятствовать беспроводной передаче энергии и/или могут вызвать повреждение системы, или могут нанести потенциальный вред людям, оказавшимся в поле действия беспроводной передачи энергии, эти объекты также должны быть идентифицированы и добавлены в коллекцию объектов.
[00144] После идентификации коллекции объектов на этапе 802 задают набор положений для этих объектов относительно передающей катушки. Это репрезентативный набор положений, в которых необходимо обнаружить присутствие любого из объектов, оказавшихся в поле действия беспроводной передачи электроэнергии.
[00145] Наряду с коллекцией идентифицированных объектов и набором заданных положений, процедура обучения включает выполнение экспериментов с каждом из объектов на этапе 804 в каждом из положений на этапе 806 для выведения соответствующей нелинейной модели системы. Для выбранного объекта, находящегося в одном из заданных положений, на этапе 808 на передающую катушку подают псевдослучайный сигнал напряжения (например, сигнал белого гауссовского шума). Одновременно с подачей указанного псевдослучайного сигнала на передающую катушку регистрируют сигнал напряжения и сигнал тока передающей катушки и на этапе 810 эти зарегистрированные сигналы согласуют с моделью Винера импеданса передающей катушки. Результатом является линейная часть, представленная импульсной характеристикой, для импеданса, и нелинейная часть, представленная нелинейной волновой формой. Импульсную характеристику и волновую форму нелинейности на этапе 812 сохраняют вместе с выбранным объектом и данным выбранным положением.
[00146] Этот процесс повторяют для каждого объекта на этапе 814 и в каждом из заданных положений на этапе 816, пока не будут проверены все объекты во всех заданных положениях.
[00147] После сбора данных для каждого объекта в каждом из заданных положений и использования известных способов на этапе 818 вычисляют оптимальный базис для коллекции сохраненных волновых форм импеданса и на этапе 820 вычисляют оптимальный базис для коллекции сохраненных волновых форм нелинейности. В этом процессе использован наиболее подходящий из способов разложения, такой как сингулярное разложение или анализ главных компонентов и т.п. Из двух вычисленный оптимальных базисов на этапе 822 идентифицируют уменьшенный набор базисных функций.
[00148] Как показано на фиг. 16В, в качестве части процедуры обучения на этапе 824 выполняют другой набор этапов для каждого объекта коллекции. На этапе 826 для каждого положения объекта, выбранного из этой коллекции объектов, предварительно вычисленную нелинейную модель данного объекта в данном положении на этапе 828 разлагают на уменьшенные базисные функции, которые были идентифицированы во время выполнения первой части алгоритма обучения. Когда процессорная система на этапе 830 выполнит эту задачу для каждого положения, для которого были зарегистрированы данные для этого объекта, она на этапе 832 определяет режимы базисных функций, которые присущи этому объекту для этой коллекции моделей. Иными словами, процессорная система идентифицирует поднабор базисных функций, которые являются наиболее подходящими для вычисленного набора данных для этого объекта. Коэффициенты этих базисных функций задают точку в пространстве моделей для соответствующей модели. Для коллекции таких точек для всех моделей данного объекта, представляющего различные положения/ориентации, может быть использован известный способ классификации для задания область этого пространства, которая соответствует указанному соответствующему объекту.
[00149] Описанный выше процесс выполняют для каждого из объектов в коллекции, пока на этапе 834 не будет определено, что исследованы все объекты. Результаты задают области пространства моделей, которые соответствуют обнаруженному присутствию соответствующего из инородных объектов. Этот результат представляет собой уменьшенный набор базисных функций, который наряду с классификацией или кластерной информацией хранится в электронном управляющем устройстве передатчика энергии и впоследствии может быть использован во время обнаружения объекта. Эти данные хранятся в запоминающем устройстве беспроводной передающей энергию системы для использования в алгоритме обнаружения.
[00150] Как показано на фиг. 17, для выполнения обнаружения объекта электронное управляющее устройство передатчика энергии на этапе 900 подает псевдослучайный сигнал напряжения (например, белый гауссовский шум) на передающую катушку и на этапе 902 измеряет и регистрирует волновые формы напряжения и тока в катушке. Затем, с использованием идентификации нелинейной системы, как описано выше, электронное управляющее устройство на этапе 904 согласует нелинейную модель динамической системы катушки (например, импеданс) с данными записанных волновых форм. Затем, с использованием уменьшенного набора базисных функций, идентифицированных во время фазы обучения, электронное управляющее устройство на этапе 906 разлагает волновые формы, полученные для нелинейной модели, на базисные функции для получения вектора, представляющего набор коэффициентов для указанных базисных функций.
[00151] Затем, для выбранного инородного объекта на этапе 908, представленного в его базе данных, электронное управляющее устройство на этапе 910 определяет коэффициенты базисных функций, которые были определены во время обучения как присущие этому объекту. Затем, с использованием этих коэффициентов электронное управляющее устройство на этапе 912 определяет, где этот вектор расположен в пространстве моделей относительно области, которая была предварительно определена способами классификации, для представления инородного объекта. Если определено, что набор коэффициентов задает точку в пространстве моделей, которая лежит в пределах области (например, кластера размеров объекта) или достаточно близко к ней, делают заключение, что обнаружен близкий инородный объект, и электронное управляющее устройство устанавливает флаг, вызывая на этапе 914 таким образом завершение и/или прекращение зарядки.
[00152] Если определено, что объект не обнаружен, электронное управляющее устройство сбрасывает любой флаг, который мог быть установлен с целью прерывания зарядки, и переходит к этапу 916, на котором проверяет следующий объект в его базе данных. Этот процесс повторяется на этапе 916 для каждого объекта в базе данных, пока будут проверены все объекты.
[00153] После проверки всех объектов в базе данных электронное управляющее устройство возвращается назад к началу процедуры, подает другой псевдослучайный сигнал на передающую катушку и выполняет новый поиск присутствия любых инородных объектов.
[00154] Более простой и в вычислительном отношении более эффективный альтернативный способ показан на фиг. 18А и 18В. В этом способе использован метод Green, описанный в связи с автоматически настраивающимся алгоритмом, показанным на фиг. 14А и 14В. Ниже приведено подробное описание этого алгоритма.
[00155] Как описано выше, процесс начинается на этапе 1000 с идентифицирования и сбора коллекции объектов конкретного класса, которые необходимо обнаружить. Кроме того, для каждого объекта в коллекции все положения, которые должны быть проверены, заданы как идентичные, а также положения любых других объектов, которые, как ожидается, могут находиться рядом с данным объектом. Один важный классификатор может быть присутствием любого объекта, подобного биологической ткани, находящегося рядом с катушкой для передачи энергии. Другой классификатор может быть присутствием металла, у которого индуцируются вихревые токи и приводят к потерям мощности. Вариант реализации, показанный на фиг. 18А-18В, представляет собой процесс обнаружения биологической ткани.
[00156] В общем, для построения нелинейной модели для обнаружения биологических тканей различных типов и масс биологическую ткань размещаются в различных местоположениях относительно передающей катушки и выполняют измерения. В частности, для каждого объекта и каждого положения на этапе 1002 выполняют следующие этапы. На этапе 1006 подают на передающую катушку псевдослучайный возмущающий сигнал напряжения и одновременно измеряют и регистрируют результирующий ток в передающей катушке. Кроме того, на этапе 1008 генерируют аварийный сигнал для объекта/положения, указывающий, что силовое поле может быть вредным или создает опасность. Это может быть определено опытным путем во время этой фазы с использованием, например, катушек с калиброванными нагрузками. Если определено, что объект находится в опасной зоне (т.е. присутствует возможное вредное воздействие или опасные условия следуют из пребывания в данном местоположении), аварийный сигнал устанавливают в постоянное значение (например "-1"). Далее, если определено, что объект находится в безопасной зоне (т.е. отсутствуют вредные воздействия или опасные условия не сопровождают пребывание в этом местоположении), значение аварийного сигнала устанавливают в другое постоянное значение (например, "+1"). Эту последовательность этапов повторяют, пока на этапе 1010 не будет определено, что проверены все объекты во всех заданных положениях.
[00157] После сбора всех данных, на этапе 1012 все зарегистрированные сигналы тока связывают вместе для создания входного сигнала, который будет использован для целей идентификации системы, и на этапе 1014 все безопасные сигналы связывают вместе подобным образом для создания соответствующего выходного сигнала. Затем, используют идентификацию нелинейной системы для выведения нелинейной модели для системы, характеризованной указанными входным и выходным сигналами. Результирующую нелинейную модель используют в электронном управляющем устройстве передатчика энергии в качестве нелинейного фильтра, который формирует сигнал, указывающий на присутствие инородного объекта.
[00158] На фиг. 18В показана работа электронного управляющего устройства для передатчика энергии. Впоследствии, в неизвестной среде, электронное управляющее устройство для передатчика энергии на этапе 1018 инициирует поиск инородных объектов. Эта процедура включает подачу на этапе 1020 псевдослучайного сигналу напряжения на передающую катушку (то же самое, которое использовали для построения базы данных с информацией об инородных объектах) и на этом же этапе измеряют и регистрируют волновую форму тока. Записанную волновую форму тока обрабатывают на этапе 1022 с использованием предварительно выведенной нелинейной системы. Выход, имеющий положительное значение, указывает на возможное присутствие инородного объекта (например, живой ткани), и электронное управляющее устройство генерирует сигнал прерывания, который на этапе 1024 вызывает прекращение подачи энергии в передающую катушку. Затем, электронное управляющее устройство повторяет цикл поиска для определения момента, когда устранено присутствие инородного объекта.
[00159] Если нелинейный фильтр формирует отрицательное значение, указывающее, что инородный объект не обнаружен, все предварительно установленные сигналы прерывания сбрасываются, и цикл поиска повторяется.
[00160] Двумя конкретными примерами псевдослучайных указанных выше сигналов могут служить белый гауссовский шум (GWN) и псевдослучайные двоичные последовательности (PRBS). Однако указанные примеры не должны быть истолкованы как ограничительные. Ссылка на псевдослучайный сигнал также должна быть истолкована как включающая, например, шумоподобные сигналы, мощность которых может быть достаточной для возбуждения некоторых режимов в целевой системе. Кроме того, указанный выше псевдослучайный сигнал следует толковать как охватывающий любой сигнал, который может быть использован для выведения импульсной характеристики или передаточной функции для возбуждаемой системы.
[00161] Другие варианты реализации также находятся в пределах объема защиты пунктов приложенной формулы. Например, известны несколько "пространств", используемых для параметрического представления линейных динамических систем: методы пространства состояний; передаточные функции; частотные функции; уравнения в конечных разностях в форме авторегрессионных моделей ARX, ARMA, ARMAX; полиномы Z-области; и способы временной области, в которой импульсная характеристика представлена как параметрическая функция времени. Известны способы преобразования представлений из одного пространства в другое пространство, такие как передаточные функции для представления пространства состояний. В описанных выше вариантах реализации временная область и представления частотной области были указаны явно. Однако, это указание не следует толковать как ограничивающее. Использование любого из альтернативных представлений следует считать как находящееся в пределах объема защиты настоящего изобретения.
[00162] В вышеописанных вариантах реализации моделируемые представления динамических систем являлись импедансом передающей катушки и током передающей катушки. Разумеется, можно было моделировать другие представления динамических систем, включая, например, переданную энергию, потери мощности и эффективность передачи энергии. Для некоторых представлений могла возникнуть необходимость получения информации от приемника посредством другого канала. Например, потери мощности или эффективность передачи энергии требуют отслеживания энергии, поступающей в батарейный блок; и, таким образом, может потребоваться надежное предоставление приемной системой такой информации.
[00163] Не смотря на то, что вышеописанные варианты реализации выполнены с конкретной ссылкой на платформу транспортного средства, это не означает, что использование изобретений, описанных в настоящей заявке, должно быть ограничено только этой платформой. Описанные в настоящей заявке изобретения могут быть применены для любой системы для беспроводной передачи энергии, в которой передающая энергию беспроводным способом система и приемная система могут быть сближены друг с другом с целью передачи энергии от одной системы к другой.
[00164] В случае алгоритмов обнаружения было указано, что передающая катушка использовалась для обнаружения присутствия приемной катушки или инородного объекта. Такой подход совсем не является обязательным. Вместо этого, может быть использована дополнительная отдельная катушка, выделенная для использования функцией обнаружения.
[00165] Следует дополнительно отметить, что алгоритмы, представленные в настоящей заявке, не обязательно должны исполняться только на одиночном процессоре, как может показаться или подразумеваться из описания. Напротив, могут быть использованы множество процессоров для решения описанных задач, распределенных между ними соответствующим способом. Например, в случае алгоритма, показанного на фиг. 9, сбор всех данных может быть использован для выполнен с использованием одного процессора, и идентификация нелинейной системы может быть выполнена с использованием другого процессора.
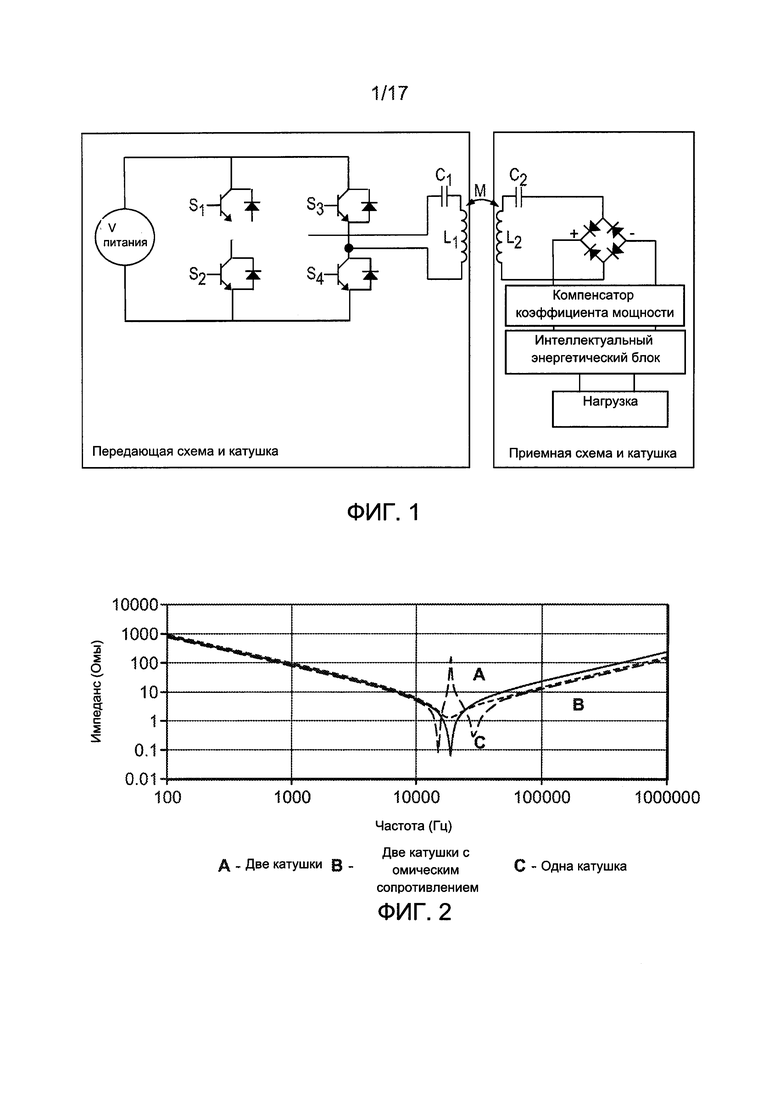
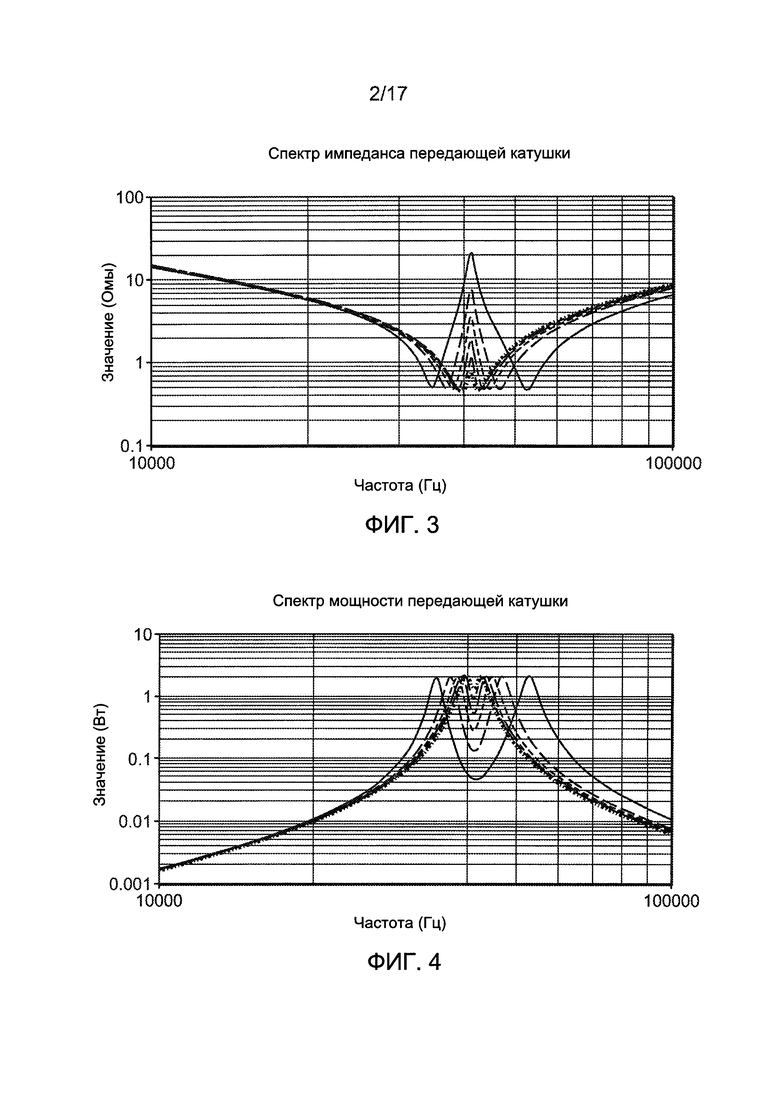
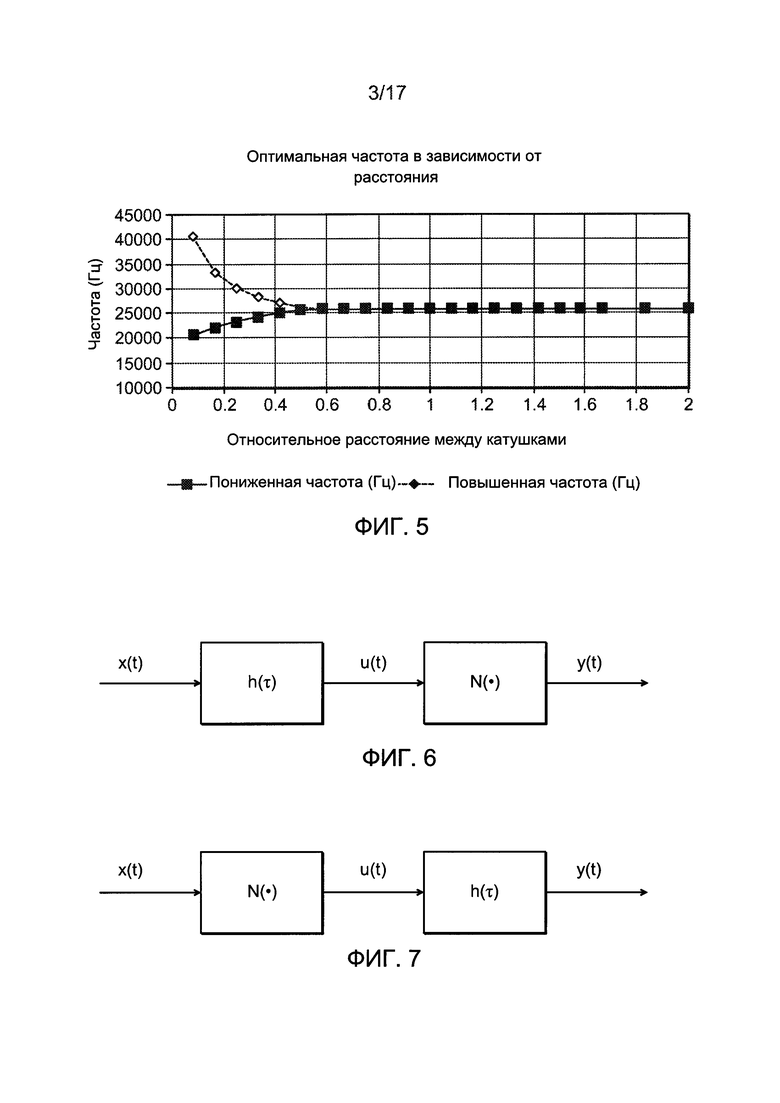
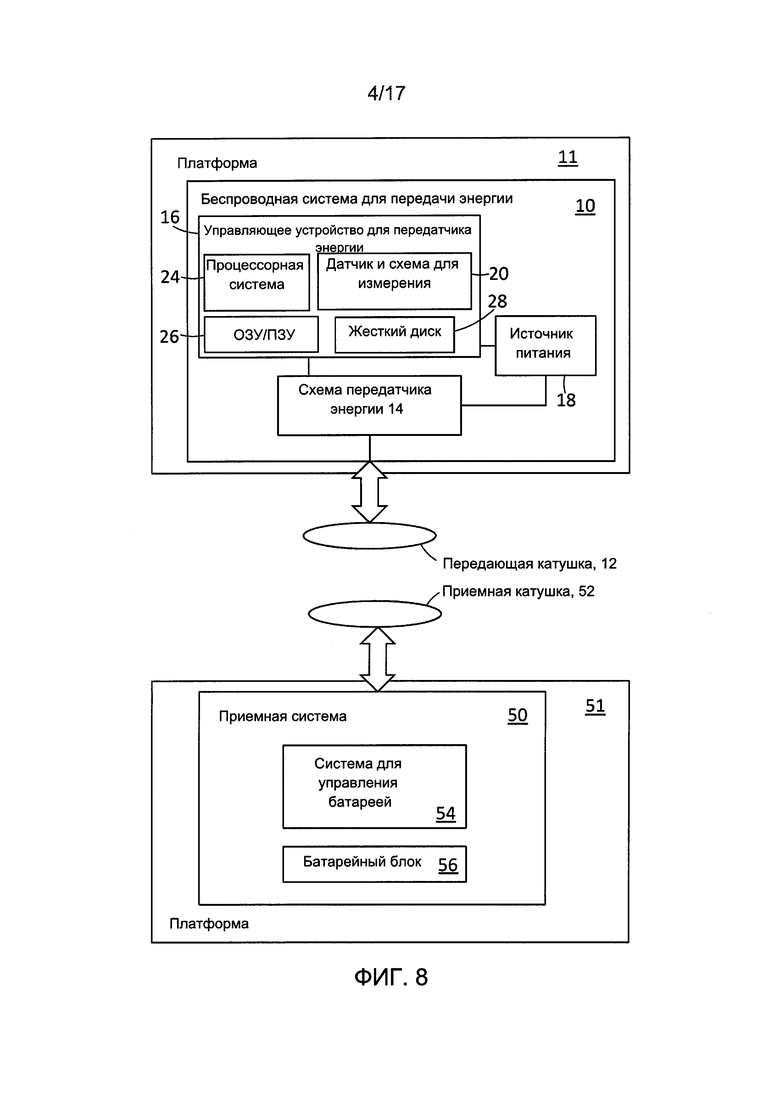
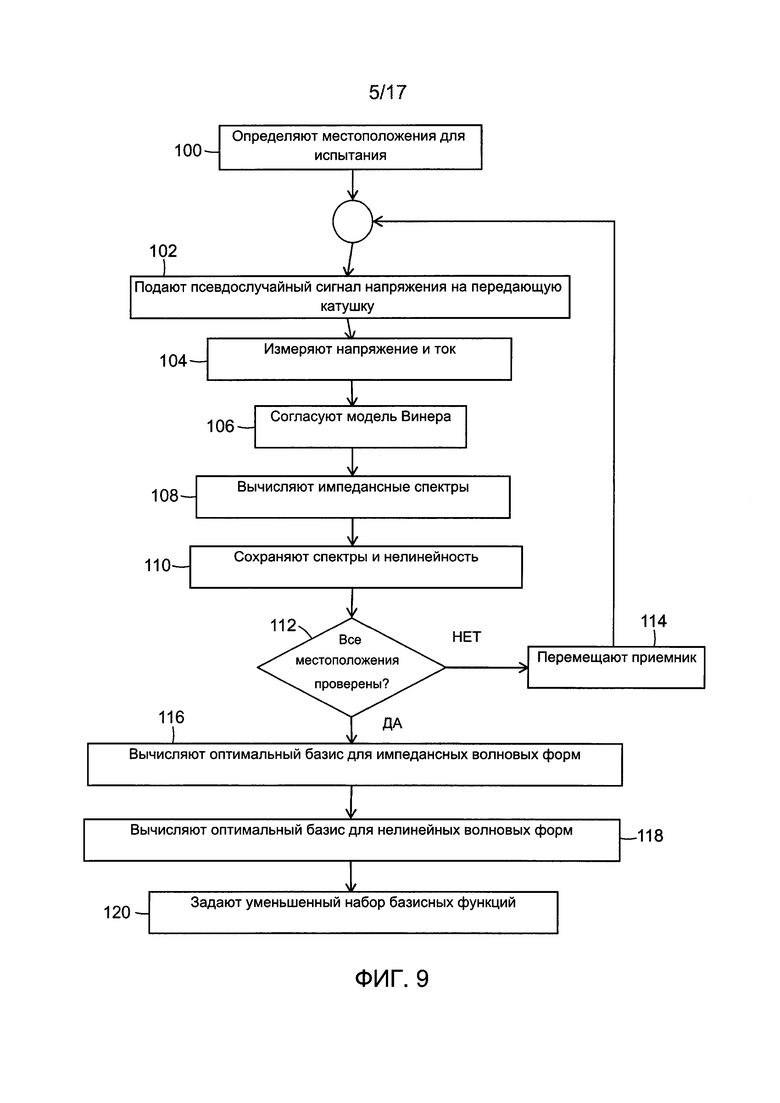
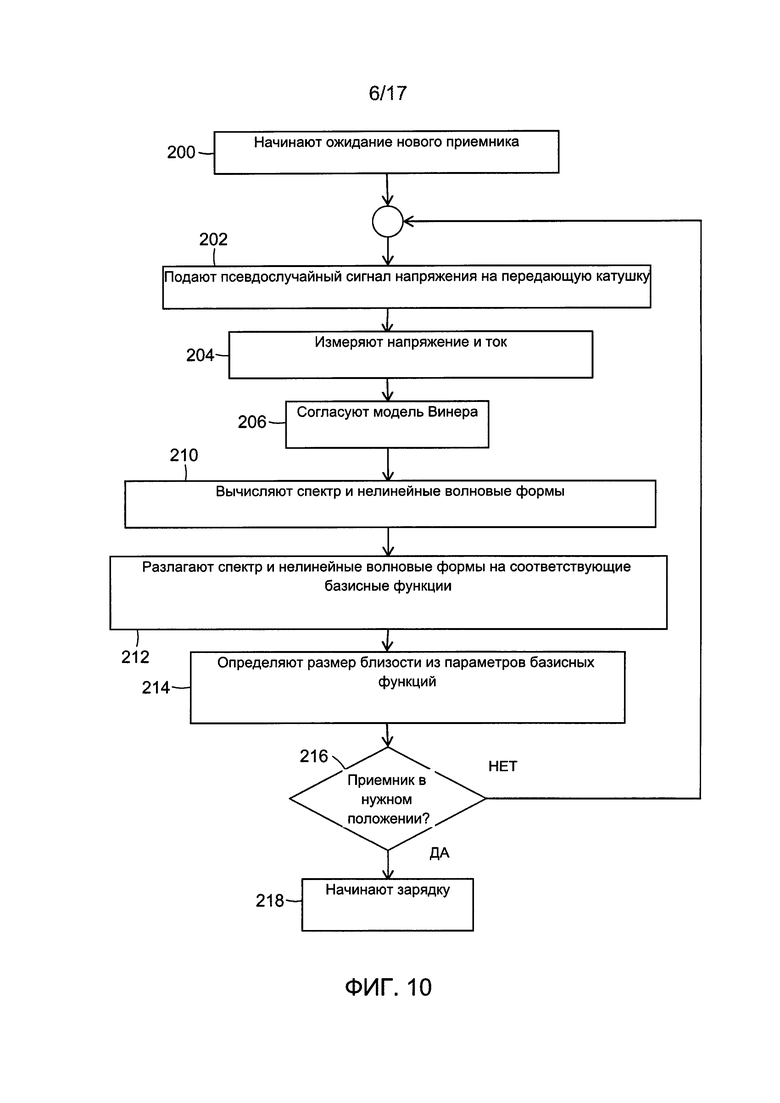
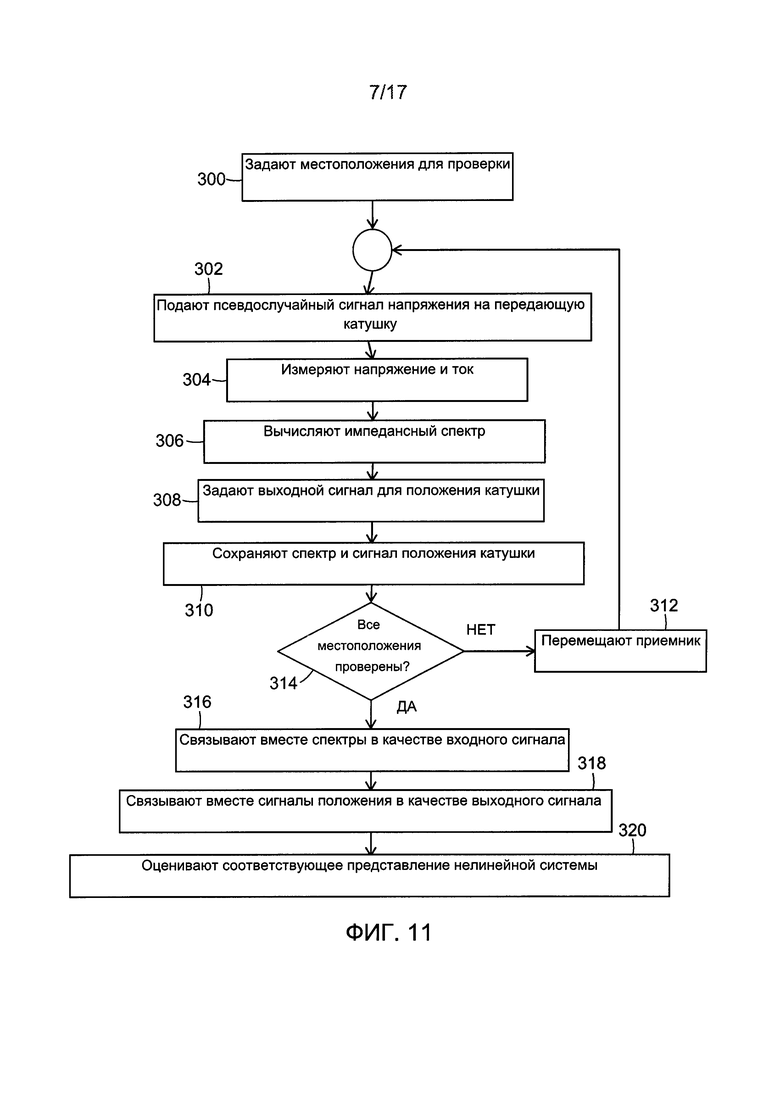
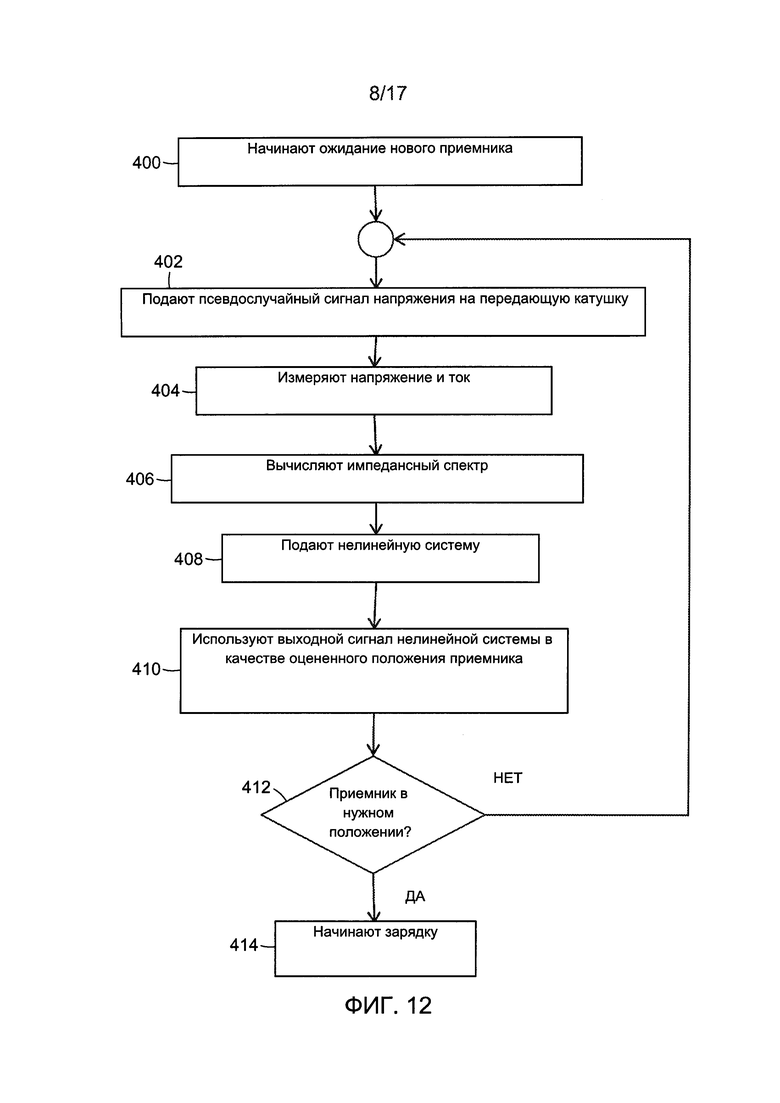
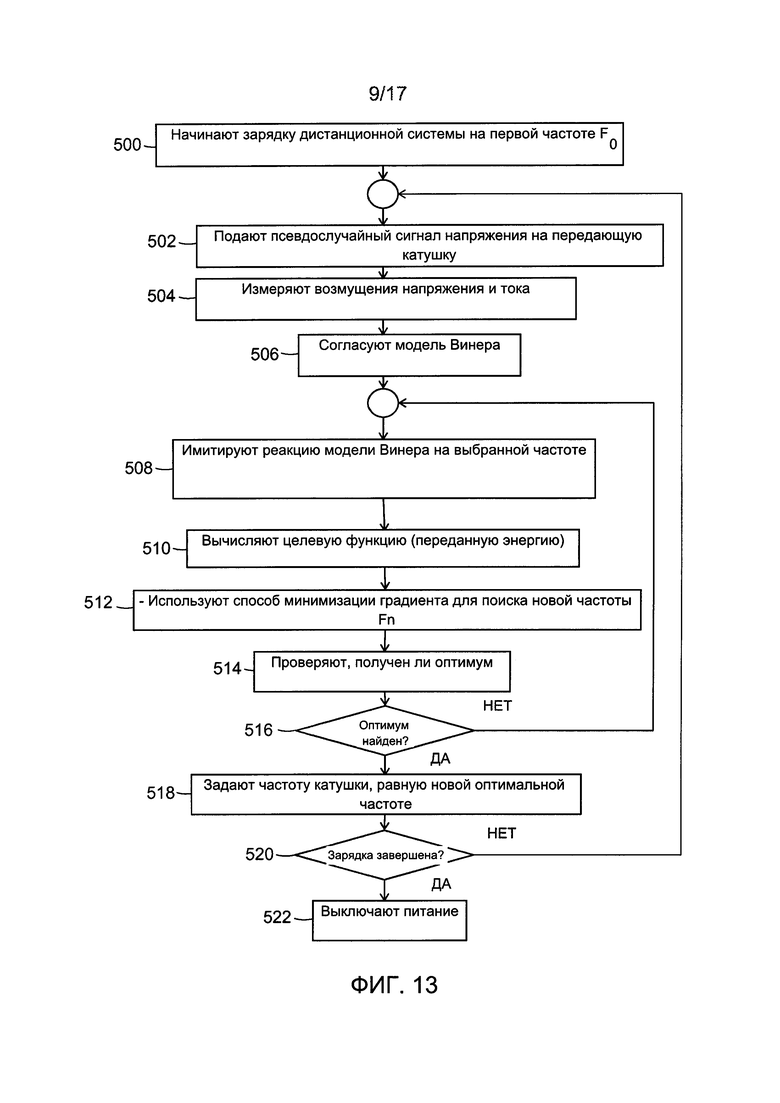
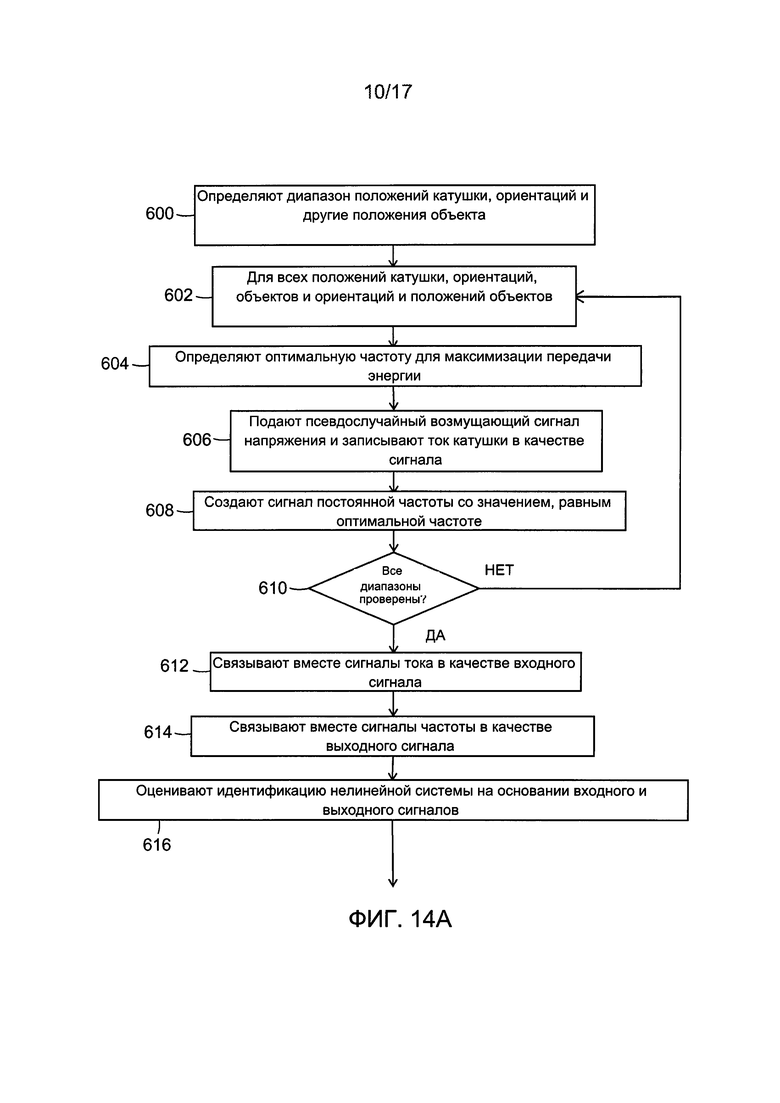
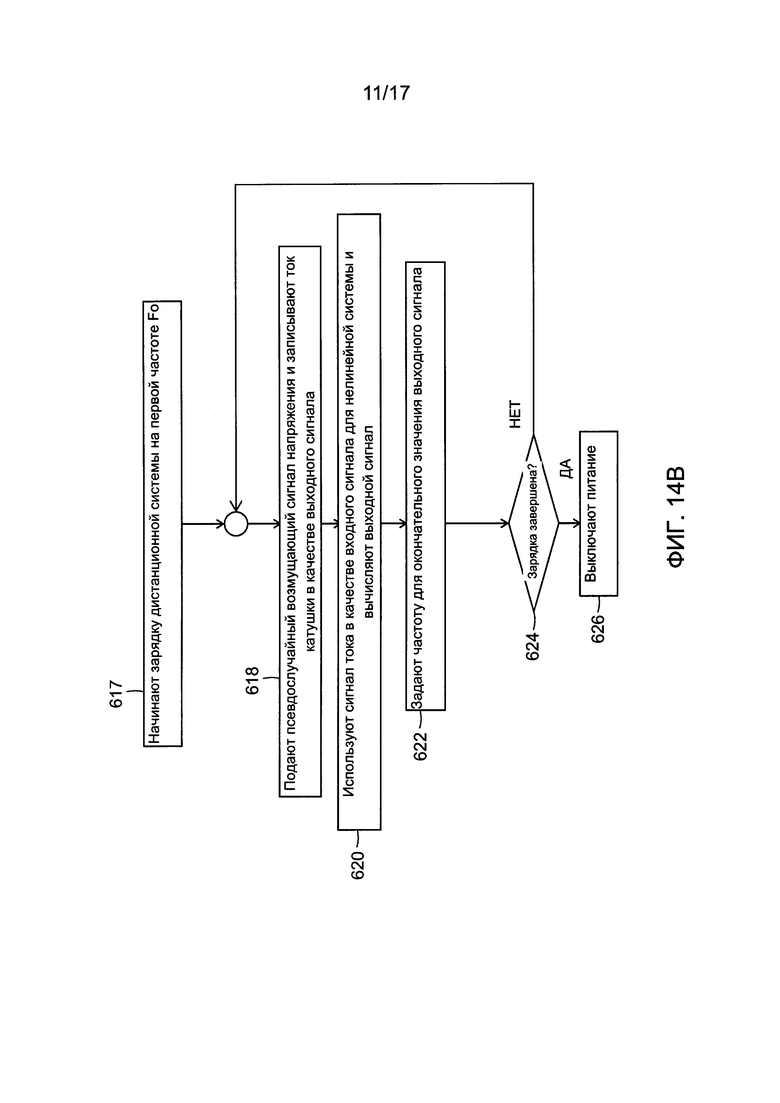
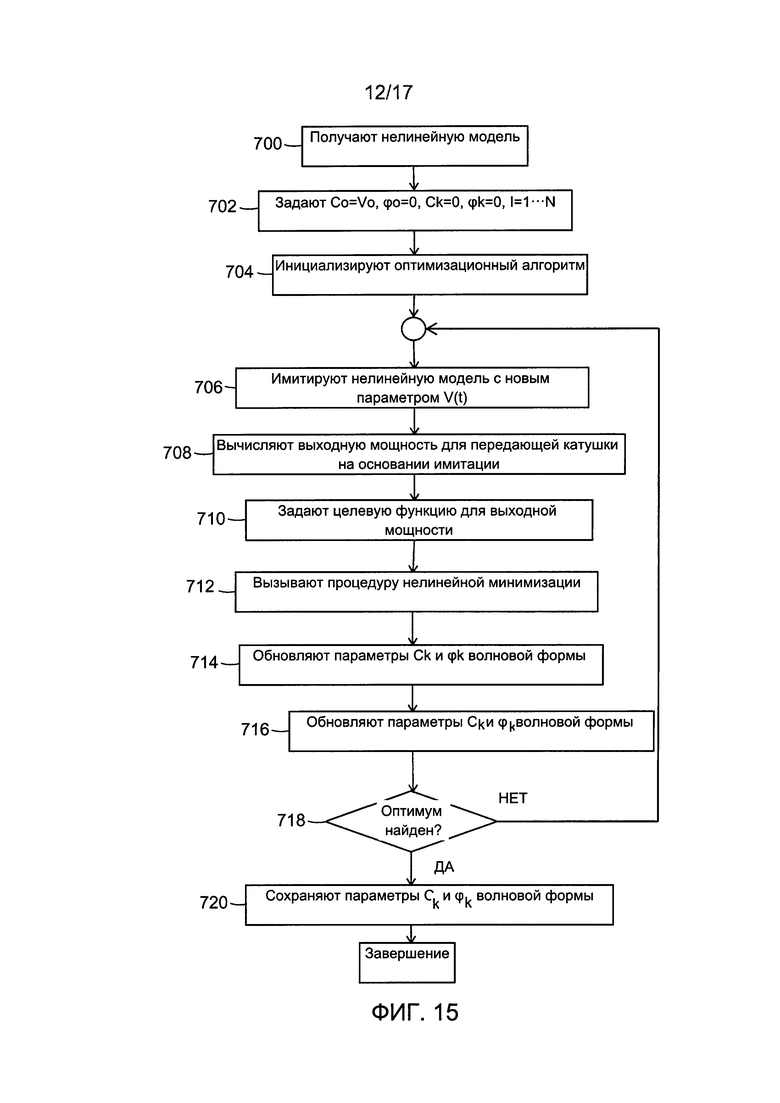
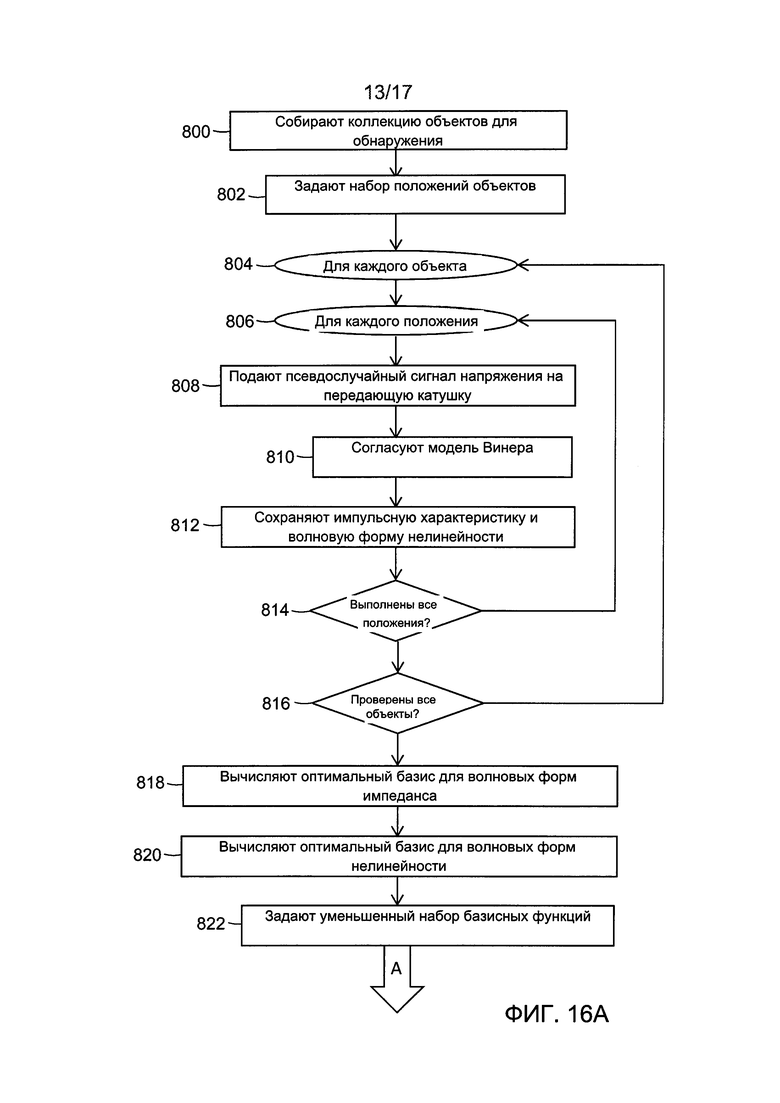
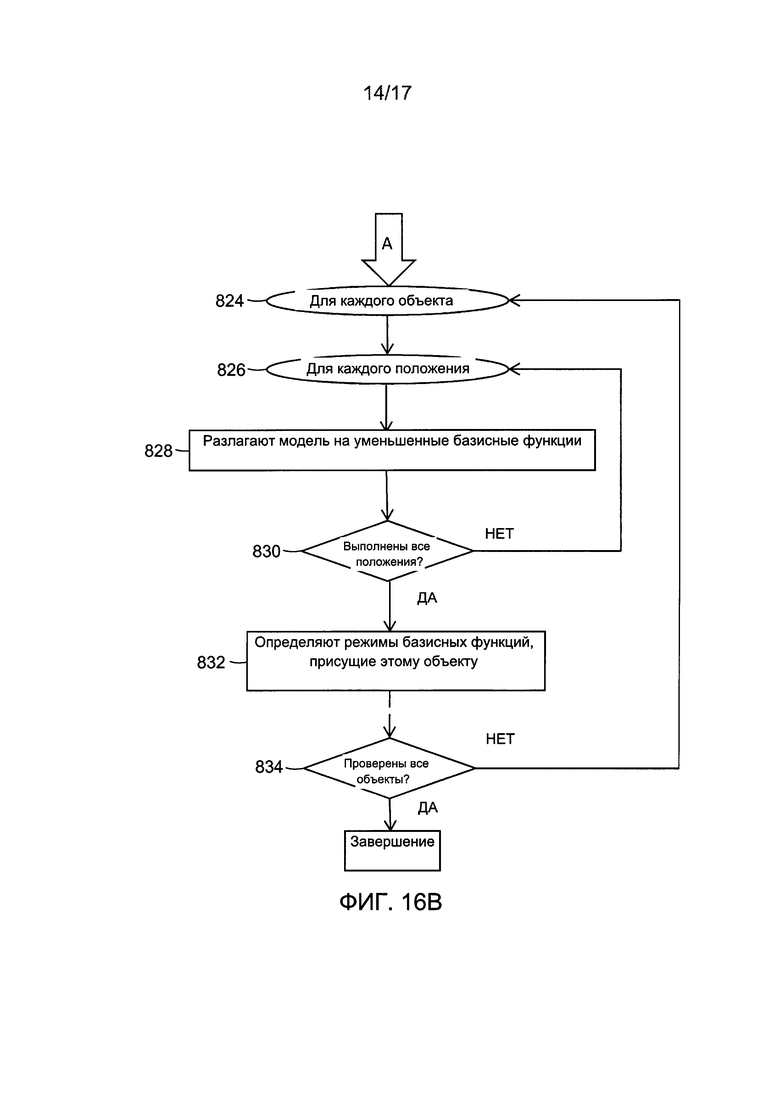
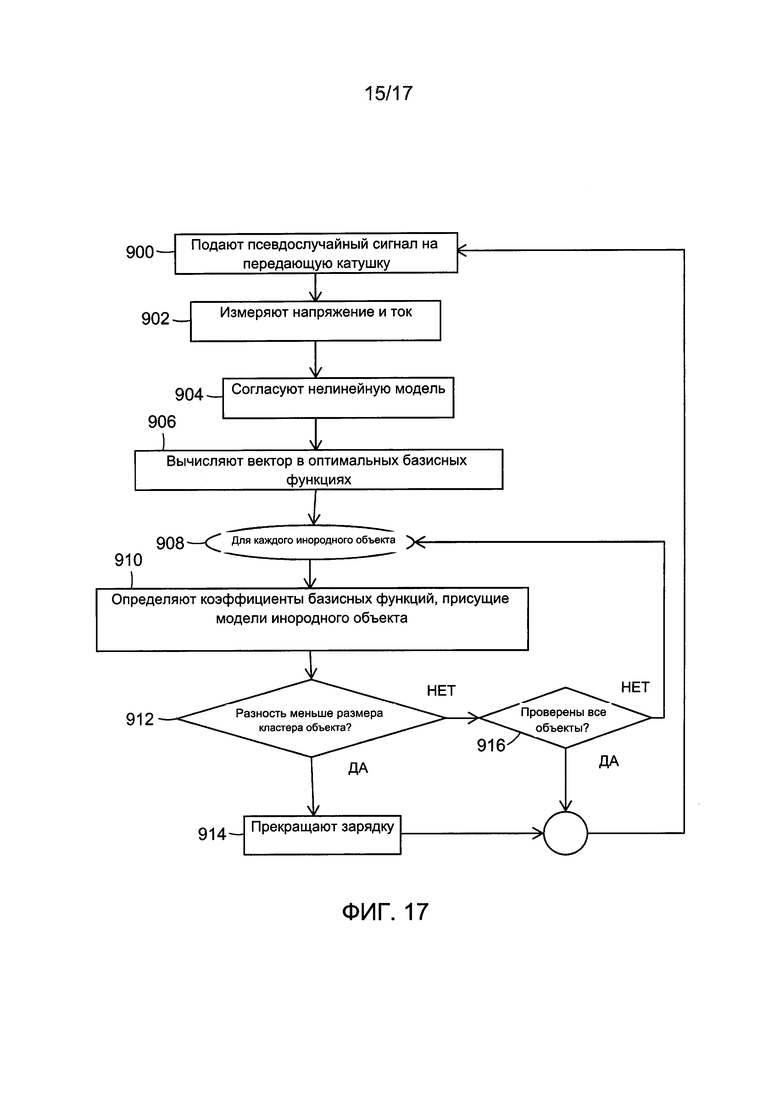
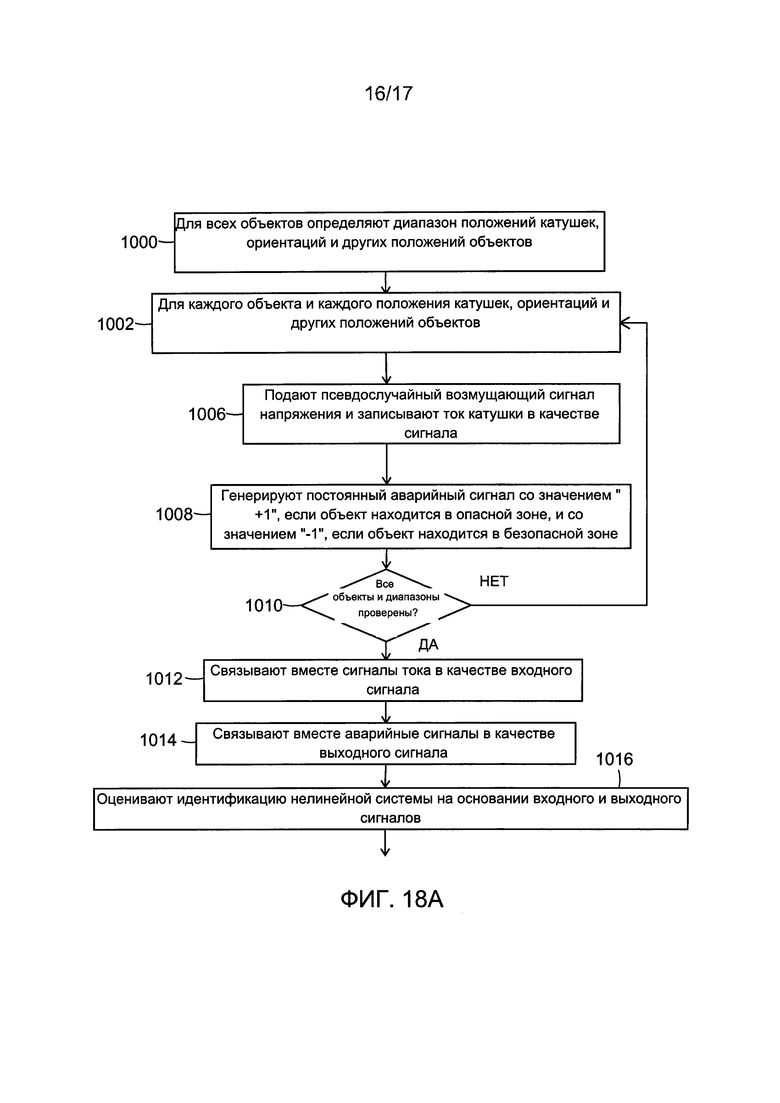
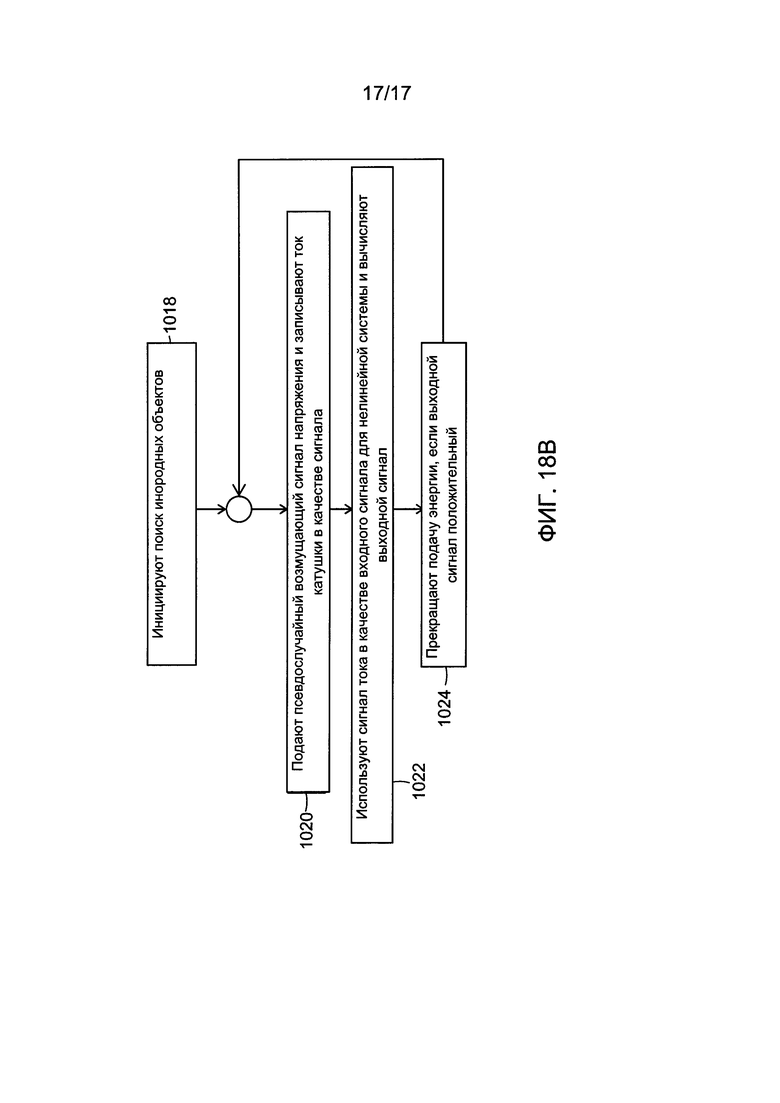
Использование: в области электротехники. Технический результат – повышение эффективности беспроводной передачи энергии. Способ обнаружения, находится ли приемная катушка рядом с передающей катушкой в системе для беспроводной передачи энергии (WPTS), включает этапы, согласно которым подают псевдослучайный сигнал на передающую катушку, во время подачи псевдослучайного сигнала на передающую катушку регистрируют один или большее количество сигналов, выработанных в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал, путем использования одного или большего количества зарегистрированных сигналов генерируют модель системы для электрических характеристик системы для беспроводной передачи энергии и используют сгенерированную модель системы в сочетании с сохраненными обучающими данными для определения, находится ли объект, имеющий характеристики, отличающие указанный объект как приемную катушку, рядом с передающей катушкой. 8 н. и 54 з.п. ф-лы, 21 ил.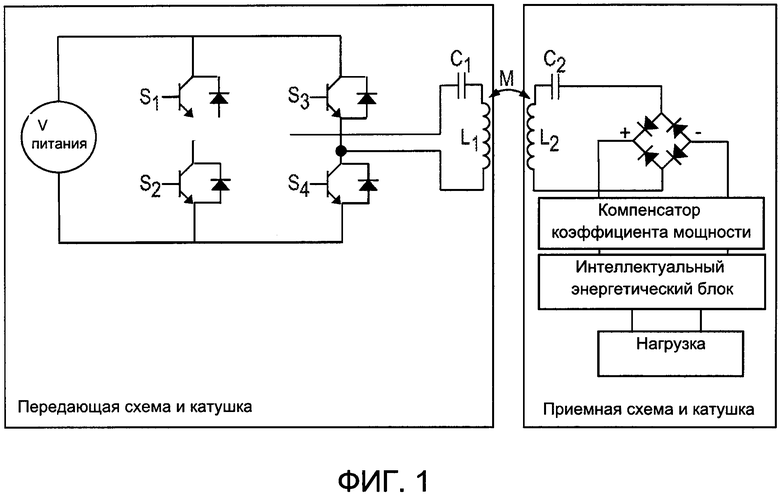
1. Способ обнаружения, находится ли приемная катушка рядом с передающей катушкой в системе для беспроводной передачи энергии (WPTS), согласно которому:
подают псевдослучайный сигнал на передающую катушку,
во время подачи псевдослучайного сигнала на передающую катушку регистрируют один или большее количество сигналов, выработанных в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал,
путем использования одного или большего количества зарегистрированных сигналов генерируют модель системы для электрических характеристик системы для беспроводной передачи энергии и
используют сгенерированную модель системы в сочетании с сохраненными обучающими данными для определения, находится ли объект, имеющий характеристики, отличающие указанный объект как приемную катушку, рядом с передающей катушкой.
2. Способ по п. 1, в котором модель системы для электрических характеристик системы для беспроводной передачи энергии является моделью динамической системы для электрических характеристик системы для беспроводной передачи энергии.
3. Способ по п. 2, дополнительно включающий, если приемная катушка определена как находящаяся рядом с передающей катушкой, инициирование беспроводной передачи энергии посредством передающей катушки в приемную катушку.
4. Способ по п. 2, согласно которому псевдослучайным сигналом является псевдослучайный сигнал напряжения.
5. Способ по п. 2, согласно которому псевдослучайный сигнал является достаточно сильным для стимулирования нелинейности в приемной системе, соединенной с приемной катушкой.
6. Способ по п. 4, согласно которому один или большее количество сигналов содержат сигнал тока передающей катушки.
7. Способ по п. 4, согласно которому один или большее количество сигналов содержат сигнал тока и сигнал напряжения передающей катушки.
8. Способ по п. 2, согласно которому использование сгенерированной модели динамической системы включает сравнение информации, содержащейся в сгенерированной модели динамической системы, с выведенной опытным путем сохраненной информацией, которая указывает на присутствие рядом приемной катушки.
9. Способ по п. 2, согласно которому генерирование модели динамической системы включает использование идентификации системы для согласования выбранной модели с данными, выведенными из одного или большего количества зарегистрированных сигналов.
10. Способ по п. 2, согласно которому генерирование модели динамической системы включает использование идентификации нелинейной системы для согласования выбранной модели с данными, выведенными из одного или большего количества зарегистрированных сигналов.
11. Способ по п. 10, согласно которому выбранной моделью является винеровская система.
12. Способ по п. 10, согласно которому выбранной моделью является система Гаммерштейна.
13. Способ по п. 10, согласно которому выбранной моделью является параллельный каскад структурированных блоков.
14. Способ по п. 10, согласно которому выбранной моделью является ряд Вольтерра.
15. Способ по п. 10, согласно которому выбранной моделью является параметрическая линейная модель.
16. Способ по п. 10, согласно которому выбранная модель имеет динамическую линейную часть и статическую нелинейную часть.
17. Способ по п. 6, согласно которому моделью динамической системы является функция импеданса для передающей катушки.
18. Способ по п. 7, согласно которому моделью динамической системы является передаточная функция мощности для передающей катушки.
19. Способ по п. 2, согласно которому использование сгенерированной модели динамической системы включает разложение модели динамической системы на базисные функции для генерирования набора параметров базисной функции.
20. Способ по п. 19, согласно которому использование сгенерированной модели динамической системы дополнительно включает использование указанного набора параметров базисной функции для определения, находится ли приемная катушка рядом с передающей катушкой.
21. Способ по п. 2, согласно которому псевдослучайным сигналом является сигнал, выбранный из сигнала гауссовского белого шума и псевдослучайной двоичной последовательности (PRBS).
22. Способ по п. 10, согласно которому сгенерированная модель динамической системы содержит представление временной области.
23. Способ по п. 10, согласно которому сгенерированная модель динамической системы содержит представление частотной области.
24. Способ по п. 2, согласно которому сохраненные обучающие данные представлены сохраненной фильтр-функцией, причем использование сгенерированной модели динамической системы в сочетании с сохраненными обучающими данными включает обработку сгенерированной модели динамической системы для генерирования выходного сигнала, при этом выходной сигнал указывает, находится ли объект, имеющий характеристики, распознаваемые из сохраненных обучающих данных как приемная катушка, рядом с передающей катушкой, и причем обработка модели динамической системы включает применение сохраненной фильтр-функции.
25. Способ по п. 24, согласно которому один или большее количество зарегистрированных сигналов содержат сигнал тока передающей катушки.
26. Способ по п. 24, согласно которому сгенерированной моделью динамической системы является измеренный сигнал тока.
27. Способ по п. 24, согласно которому фильтр-функция является нелинейной фильтр-функцией.
28. Способ по п. 27, согласно которому нелинейная фильтр-функция выведена из измерений, выполненных на испытательной системе, содержащей испытательную передающую катушку и испытательную приемную катушку, расположенные на различных разделяющих расстояниях друг от друга.
29. Способ по п. 24, дополнительно включающий, если приемная катушка обнаружена рядом с передающей катушкой, инициирование беспроводной передачи энергии посредством передающей катушки в обнаруженную приемную катушку.
30. Система для беспроводной передачи энергии, содержащая:
передающую катушку;
схему передатчика энергии, соединенную с передающей катушкой;
схему датчика, соединенную с передающей катушкой; и
электронное управляющее устройство для управления схемой передатчика энергии и схемой датчика, причем указанное электронное управляющее устройство содержит запоминающее устройство для сохранения обучающих данных и процессорную систему, запрограммированную для:
использования схемы передатчика энергии для подачи псевдослучайного сигнала на передающую катушку;
во время подачи псевдослучайного сигнала на передающую катушку использования схемы датчика для регистрации одного или большего количества сигналов, выработанных в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал;
путем использования одного или большего количества зарегистрированных сигналов генерирования модели системы для электрических характеристик системы для беспроводной передачи энергии; и
использования сгенерированной модели системы в сочетании с указанными сохраненными обучающими данными для определения, находится ли объект, имеющий характеристики, отличающие указанный объект как приемную катушку, рядом с передающей катушкой.
31. Система для беспроводной передачи энергии по п. 30, в которой модель системы для электрических характеристик системы для беспроводной передачи энергии является моделью динамической системы для электрических характеристик системы для беспроводной передачи энергии.
32. Система для беспроводной передачи энергии по п. 31, в которой один или большее количество сигналов содержат сигнал тока и сигнал напряжения передающей катушки.
33. Система для беспроводной передачи энергии по п. 31, в которой сохраненные обучающие данные представлены сохраненной фильтр-функцией, причем процессорная система запрограммирована для использования сгенерированной модели динамической системы в сочетании с сохраненными обучающими данными путем обработки сгенерированной модели динамической системы фильтр-функцией для генерирования выходного сигнала, при этом выходной сигнал указывает, находится ли объект, имеющий характеристики, распознаваемые из сохраненных обучающих данных как приемная катушка, рядом с передающей катушкой.
34. Система для беспроводной передачи энергии по п. 33, в которой один или большее количество зарегистрированных сигналов содержат сигнал тока передающей катушки.
35. Система для беспроводной передачи энергии по п. 33, в которой сгенерированной моделью динамической системы является измеренный сигнал тока.
36. Способ поиска рабочей частоты для возбуждающего сигнала для передающей катушки в системе для беспроводной передачи энергии (WPTS), согласно которому:
подают псевдослучайный сигнал на передающую катушку;
во время подачи псевдослучайного сигнала на передающую катушку регистрируют один или более сигналов, выработанных в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал;
путем использования одного или большего количества зарегистрированных сигналов генерируют модель системы для электрических характеристик системы для беспроводной передачи энергии; и
проводят поиск оптимальной частоты для возбуждающего сигнала, причем проведение поиска включает повторяющееся использование сгенерированной модели системы для моделирования реакции в ответ на возбуждающий сигнал во время изменения рабочей частоты возбуждающего сигнала до тех пор, пока не будет найдена оптимальная частота.
37. Способ по п. 36, в котором модель системы для электрических характеристик системы для беспроводной передачи энергии является моделью динамической системы для электрических характеристик системы для беспроводной передачи энергии.
38. Способ по п. 37, согласно которому проведение поиска дополнительно включает:
вычисление выходной мощности на основании смоделированной реакции;
использование вычисленной выходной мощности в качестве целевой функции и
проведение поиска путем использования целевой функции.
39. Способ по п. 37, дополнительно включающий задание рабочей частоты возбуждающего сигнала, равной оптимальной частоте.
40. Способ по п. 37, согласно которому псевдослучайный сигнал является псевдослучайным сигналом напряжения.
41. Способ по п. 40, согласно которому один или большее количество сигналов содержат сигнал тока передающей катушки.
42. Способ по п. 40, согласно которому один или большее количество сигналов содержат сигнал тока и сигнал напряжения передающей катушки.
43. Способ по п. 37, согласно которому генерирование представления передаточной функции включает использование идентификации системы для согласования модели с данными, выведенными из одного или большего количества зарегистрированных сигналов.
44. Способ по п. 37, согласно которому генерирование модели динамической системы включает использование идентификации нелинейной системы для согласования выбранной модели с данными, выведенными из одного или большего количества зарегистрированных сигналов.
45. Способ по п. 44, согласно которому выбранной моделью является винеровская система.
46. Способ по п. 44, согласно которому выбранная модель имеет динамическую линейную часть и статическую нелинейную часть.
47. Способ по п. 37, согласно которому сгенерированная модель динамической системы содержит представление временной области.
48. Способ по п. 37, согласно которому сгенерированная модель динамической системы содержит представление частотной области.
49. Система для беспроводной передачи энергии, содержащая:
передающую катушку;
схему передатчика энергии, соединенную с передающей катушкой;
схему датчика, соединенную с передающей катушкой; и
электронное управляющее устройство для управления схемой передатчика энергии и схемой датчика, причем указанное электронное управляющее устройство содержит запоминающее устройство для сохранения обучающих данных и процессорную систему, запрограммированную для:
использования передатчика энергии для подачи псевдослучайного сигнала на передающую катушку;
во время подачи псевдослучайного сигнала на передающую катушку использования схемы датчика для регистрации одного или большего количества сигналов, выработанных в указанной системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал;
путем использования одного или большего количества зарегистрированных сигналов генерирования модели системы для электрических характеристик системы для беспроводной передачи энергии; и
проведения поиска оптимальной частоты для возбуждающего сигнала, при этом проведение поиска включает повторяющееся использование сгенерированной модели системы для моделирования реакции на возбуждающий сигнал во время изменения рабочей частоты возбуждающего сигнала до тех пор, пока не будет найдена оптимальная частота.
50. Система для беспроводной передачи энергии по п. 49, в которой модель системы для электрических характеристик системы для беспроводной передачи энергии является моделью динамической системы для электрических характеристик системы для беспроводной передачи энергии.
51. Способ поиска рабочей частоты для возбуждающего сигнала для передающей катушки в системе беспроводной передачи энергии (WPTS), согласно которому:
подают псевдослучайный сигнал на передающую катушку;
во время подачи псевдослучайного сигнала на передающую катушку регистрируют сигнал, выработанный в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал; и
обрабатывают зарегистрированный сигнал для генерирования выходного сигнала, причем выходной сигнал идентифицирует рабочую частоту, предназначенную для использования для возбуждающего сигнала, при этом обработка зарегистрированного сигнала включает применение нелинейной фильтр-функции.
52. Способ по п. 51, согласно которому нелинейная фильтр-функция была выведена из измерений, выполненных на испытательной системе, содержащей испытательную передающую катушку и испытательную приемную катушку, расположенные на различных разделяющих расстояниях друг от друга.
53. Способ по п. 51, согласно которому регистрация сигнала, выработанного в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал, включает регистрацию сигнала, выработанного передающей катушкой.
54. Система для беспроводной передачи энергии (WPTS), содержащая:
передающую катушку;
схему передатчика энергии, соединенную с передающей катушкой;
схему датчика, соединенную с передающей катушкой; и
электронное управляющее устройство для управления схемой передатчика энергии и схемой датчика, причем указанное электронное управляющее устройство содержит запоминающее устройство для сохранения нелинейной фильтр-функции и процессорную систему, запрограммированную для:
использования передатчика энергии для подачи псевдослучайного сигнала на передающую катушку;
во время подачи псевдослучайного сигнала на передающую катушку использования схемы датчика для регистрации сигнала, выработанного в указанной системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал; и
обработки зарегистрированного сигнала для генерирования выходного сигнала, причем выходной сигнал идентифицирует рабочую частоту, которая будет использована для возбуждающего сигнала, при этом обработка зарегистрированного сигнала включает применение нелинейной фильтр-функции.
55. Система для беспроводной передачи энергии по п. 54, в которой нелинейная фильтр-функция была выведена из измерений, выполненных в испытательной системе, содержащей испытательную передающую катушку и испытательную приемную катушку, расположенные на различных разделяющих расстояниях друг от друга.
56. Система для беспроводной передачи энергии по п. 54, в которой сигнал, выработанный в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал, является сигналом, выработанным передающей катушкой.
57. Способ идентификации волновой формы для возбуждающего сигнала для передающей катушки в системе для беспроводной передачи энергии (WPTS), согласно которому:
подают псевдослучайный сигнал на передающую катушку;
во время подачи псевдослучайного сигнала на передающую катушку регистрируют один или более сигналов, выработанных в системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал;
путем использования одного или большего количества зарегистрированных сигналов генерируют модель системы для электрических характеристик системы для беспроводной передачи энергии и
проводят поиск оптимальной волновой формы для возбуждающего сигнала, причем проведение поиска включает повторяющееся использование сгенерированной модели системы для моделирования реакции на возбуждающий сигнал во время изменения волновой формы возбуждающего сигнала до тех пор, пока не будет найдена оптимальная волновая форма.
58. Способ по п. 57, в котором модель системы для электрических характеристик системы для беспроводной передачи энергии является моделью динамической системы для электрических характеристик системы для беспроводной передачи энергии.
59. Способ по п. 58, согласно которому проведение поиска дополнительно включает:
вычисление выходной мощности из смоделированной реакции;
использование вычисленной выходной мощности в качестве целевой функции и
проведение поиска путем использования целевой функции.
60. Способ по п. 58, согласно которому один или большее количество сигналов, выработанных в системе для беспроводной передачи энергии, содержат сигнал, выработанный передающей катушкой в ответ на поданный псевдослучайный сигнал.
61. Система для беспроводной передачи энергии, содержащая:
передающую катушку;
схему передатчика энергии, соединенную с передающей катушкой;
схему датчика, соединенную с передающей катушкой;
электронное управляющее устройство для управления схемой передатчика энергии и схемой датчика, причем указанное электронное управляющее устройство содержит запоминающее устройство для сохранения нелинейной фильтр-функции и процессорную систему, запрограммированную для:
использования передатчика энергии для подачи псевдослучайного сигнала на передающую катушку;
во время подачи псевдослучайного сигнала на передающую катушку использования схемы датчика для регистрации одного или большего количества сигналов, выработанных в указанной системе для беспроводной передачи энергии в ответ на поданный псевдослучайный сигнал;
путем использования одного или большего количества зарегистрированных сигналов генерирования модели системы для электрических характеристик системы для беспроводной передачи энергии; и
проведения поиска оптимальной волновой формы для возбуждающего сигнала путем повторяющегося использования сгенерированной модели системы для моделирования реакции на возбуждающий сигнал во время изменения волновой формы возбуждающего сигнала до тех пор, пока не будет найдена оптимальная волновая форма.
62. Система для беспроводной передачи энергии по п. 61, в которой модель системы для электрических характеристик системы для беспроводной передачи энергии является моделью динамической системы для электрических характеристик системы для беспроводной передачи энергии.
| US 2010084918 A1, 08.04.2010 | |||
| US 2010187913 A1, 29.07.2010 | |||
| СИСТЕМА БЕСКОНТАКТНОЙ ПЕРЕДАЧИ ЭНЕРГИИ | 2010 |
|
RU2408124C1 |

