Область техники, к которой относится изобретение
Изобретение относится к способу магниторезонансной эластографии, который содержит приложение механических колебаний с периодом (T) колебаний к обследуемому объекту для генерирования в объекте механических волн, и применению последовательности сбора данных магнитного резонанса, чувствительных к движению, с временем TR повторения, для сбора сигналов магнитного резонанса от объекта.
Уровень техники изобретения
Такой способ магниторезонансный эластографии известен из патента US 5 592 085. В известном способе магниторезонансной эластографии к обследуемому объекту прикладывается колебательное напряжение. Изменяющееся магнитное градиентное поле синхронизируется с приложенным напряжением, используемым в последовательности получения изображений с помощью NMR (ядерный магнитный резонанс), для измерения спинового движения по всему полю зрения.
Сущность изобретения
Задача изобретения состоит в обеспечении способа магниторезонансной эластографии (MRE), позволяющего накладывать меньшие ограничения на время повторения сбора сигналов.
Эта задача решается способом MRE, соответствующим изобретению, содержащим этапы, на которых
- прикладывают к обследуемому объекту механические колебания с периодом (T) колебаний для генерирования в объекте механических волн,
- применяют последовательность сбора данных магнитного резонанса, чувствительных к движению, со временем повторения TR, для сбора сигналов магнитного резонанса от объекта,
причем последовательность сбора данных содержит применение одного или более этапов фазового кодирования в пределах отдельного времени повторения, и
время повторения, умноженное на количество фазовых кодирований в пределах одного времени повторения не равно целочисленному множителю периода колебания, и
- магниторезонансное изображение волновой структуры реконструируют из сигналов магнитного резонанса, собранных в пространстве выборки, определенном фазой механического колебания и фазовым кодированием.
Поскольку время повторения последовательности сбора данных не ограничивается целым числом, кратным периоду колебаний, время повторения может быть сокращено, например уменьшено до значений порядка 10 мс или даже до таких малых значений, как 2 мс. Таким образом, настоящее изобретение позволяет выполнять MRE с помощью последовательностей полевого эха. Во время колебаний, приложенных к телу пациента, собираются сигналы магнитного резонанса для генерирования механических волн сдвига. Для каждого профиля фазового кодирования, то есть сигналов магнитного резонанса, имеющих одинаковые фазовое кодирование и диапазон считывания (или частоту) кодирования, регистрируется фаза механического колебания. Таким образом, согласно способу, соответствующему изобретению, собираются сигналы магнитного резонанса в пространстве выборки, определенном механическим колебанием и фазовым кодированием. Это позволяет реконструировать волновую структуру, возникающую за счет механических колебаний.
Эти и другие аспекты изобретения будут дополнительно объяснены со ссылкой на варианты осуществления, определенные в зависимых пунктах формулы изобретения.
В одном аспекте изобретения скомпонованные сигналы магнитного резонанса собираются так, что для отдельных значений (этапов) фазового кодирования, сигналы магнитного резонанса собираются, имея несколько величин фазы механического колебания. То есть, как представляется, из трех значений фазы механического колебания для отдельного фазового кодирования могут быть извлечены постоянная составляющая (DC) и фаза и амплитуда синусоидальной волны с периодом механического колебания. Эти значения затем выводятся для нескольких фазовых кодирований. Для каждого этапа фазового кодирования в направлениях ky и/или kz в k-пространстве для трех или более значений фазы механического колебания в пространстве выборки собираются и компонуются сигналы магнитного резонанса. Три значения фазы механического колебания позволяют при рассматриваемом фазовом кодировании извлекать постоянную составляющую и фазу и амплитуду синусоидальной волны с периодом механического колебания. Когда сигналы магнитного резонанса собираются более чем для трех значений фазы механического колебания, то тогда механические колебания в ткани могут быть реконструированы более точно. С другой стороны, когда сигналы магнитного резонанса собираются для большего количества значений фазы, необходимо более длительное время, чтобы собрать все сигналы магнитного резонанса. Для каждого значения фазового кодирования из собранных сигналов магнитного резонанса для этого этапа фазового кодирования извлекают значения постоянной составляющей, динамической амплитуды и фазы механических волн. Динамическая амплитуда является диапазоном изменений синусоидальной волны, которая представляет механическую волну в объекте. Таким образом, магниторезонансное изображение волновой структуры создается из фазы и динамической амплитуды механического колебания ткани как функции фазового кодирования и фазы механических волн. Постоянная составляющая необходима только для извлечения динамических амплитуд, которые сами по себе достаточны, чтобы реконструировать из них волновую структуру. Из постоянной составляющей может быть реконструировано изображение анатомической области, в которой распространяется волновая структура. Таким образом, этот аспект изобретения позволяет показывать в изображении волновую структуру, также представляющую неподвижную анатомию.
Этот подход основан на известной частоте механической волны. На практике, частота механической волны через ткань объекта, например, обследуемого пациента, равна частоте приложенного механического колебания. Дополнительно, механические волны на практике весьма точно аппроксимируются синусоидой. Тогда волновая структура может быть реконструирована посредством преобразования Фурье для собранных данных. Фазовые кодирования могут осуществляться в одном направлении (ky) или в двух направлениях (ky и kz) в k-пространстве, когда используется структура сканирования в прямоугольных координатах в k-пространстве. Настоящее изобретение может также быть осуществлено при других подходах к сканированию k-пространства, таких как использование радиальных или спиральных траекторий сканирования в k-пространстве. Как правило, фазовое кодирование приводится в действие приложением временных градиентных полей фазового кодирования. Поскольку сигналы магнитного резонанса собираются фактически для большого количества значений фазы механического колебания, волновая структура реконструируется с высокой точностью.
В альтернативном аспекте изобретения, для ограниченного количества, по меньшей мере трех, значений фазы механического колебания фактически собираются сигналы магнитного резонанса. Для дополнительных значений фазы механического колебания значения (считанных кодированными) сигналов магнитного резонанса интерполируются из измеренных сигналов магнитного резонанса. Таким образом, получается последовательность данных, соответствующая последовательным значениям фазы механического колебания. Эта процедура повторяется для нескольких значений фазового кодирования. Из всего набора данных может быть реконструирована волновая структура. Этот интерполяционный подход требует получения меньшего количества сигналов магнитного резонанса, так что время сбора данных сокращается.
В дополнительном аспекте изобретения механические колебания генерируются одновременно на нескольких различных частотах колебаний. В этом аспекте изобретения механические колебания генерируются несколькими приводами, вместе создающими широкую пространственную область, в которой механические волны генерируются в обследуемом объекте. То есть, каждый привод генерирует механические волны в области, а области, в которых отдельные приводы вместе генерируют механические волны, формируют широкую пространственную область. Предпочтительно, соответствующие приводы действуют на разных частотах. Таким образом, избегают интерференций механических волн, генерируемых различными приводами. То есть, использование различных частот колебаний различными приводами позволяет избежать того, чтобы вклады от различных приводов пагубно взаимодействовали, создавая области, не производящие сигнал. Когда используются несколько (N) частот колебаний, то тогда для 2N+1 значений фазы механического колебания сигналы магнитного резонанса необходимы для каждого этапа фазового кодирования. Это позволяет вслед за смещением постоянной составляющей извлечь динамическую амплитуду и фазу механического колебания на каждой из частот колебаний.
То есть, пространственная область, в которой генерируются механические колебания, расширяется при размещении приводов, создающих механические колебания на различных частотах, в различных местах относительно объекта, то есть обследуемого пациента.
Изобретение также относится к системе магниторезонансного исследования, как определено в п.5 формулы изобретения. Система магниторезонансного исследования, соответствующая изобретению, содержит привод для прикладывания механических колебаний к объекту, в частности к телу обследуемого пациента, так чтобы в объекте создавались механические волны. Система магниторезонансного исследования снабжается системой высокочастотного возбуждения, чтобы прикладывать высокочастотные импульсы для возбуждения спинов в объекте. Кроме того, высокочастотные импульсы могут применяться для перефокусировки и/или инверсии возбужденных спинов. Градиентная система содержит градиентные катушки, чтобы прикладывать временные градиентные магнитные поля (градиентные импульсы) для пространственного кодирования сигналов магнитного резонанса. Градиентная система также генерирует чувствительные к движению градиентные импульсы. Система высокочастотного возбуждения и градиентная система действуют вместе, чтобы сгенерировать последовательности сбора данных магнитного резонанса, чувствительных к движению, для генерирования сигналов магнитного резонанса от объекта. Система высокочастотного возбуждения содержит высокочастотные антенны, например, в форме высокочастотных катушек. Градиентная система содержит градиентные катушки и градиентные усилители. Градиентные усилители питают электрическим током градиентные катушки, которые генерируют градиентное магнитное поле. Эти высокочастотные катушки часто могут действовать в режиме возбуждения, а также в режиме приемника. Таким образом, высокочастотные катушки часто используются совместно системой высокочастотного возбуждения и системой высокочастотного приемника. Система высокочастотного приемника, таким образом, содержит высокочастотные приемные антенны, то есть катушки высокочастотного приемника, или высокочастотные катушки действуют в режиме приема. Система высокочастотного приемника также содержит систему электронного (цифрового) приемника, чтобы получать сигналы магнитного резонанса, принимаемые антеннами высокочастотного приемника. Система приемника также обрабатывает сигналы магнитного резонанса, чтобы представлять сигналы магнитного резонанса, пригодные для подачи на реконструктор. Реконструктор реконструирует, например, посредством быстрого преобразования Фурье, магниторезонансное изображение из сигналов магнитного резонанса. Система высокочастотного возбуждения, система высокочастотного приемника, реконструктор и привод управляются блоком управления, часто в форме цифрового главного компьютера. В соответствии с изобретением, блок управления управляет этими компонентами сигналов магнитного резонанса для выполнения способа, соответствующего изобретению. То есть, блок управления выполнен с возможностью установки времени повторения механических колебаний, установки времени повторения последовательности сбора данных магнитного резонанса, чувствительных к движению, умноженного на количество этапов фазового кодирования, не равного целочисленному множителю периода колебания. Дополнительно, блок управления предписывает системе высокочастотного приемника компоновать сигналы магнитного резонанса в пространстве выборки, определенном фазой механического колебания и фазового кодирования. Наконец, реконструктор реконструирует магниторезонансное изображение механических волн в обследуемом объекте из собранных сигналов магнитного резонанса.
Изобретение дополнительно относится к компьютерной программе, как определено в п.6 формулы изобретения. Компьютерная программа, соответствующая изобретению, может быть предоставлена на носителе данных, таком как диск CD-ROM или карта памяти для подключения к USB-порту, или компьютерная программа, соответствующая изобретению, может быть загружена из сети передачи данных, такой как всемирная сеть. При установке в компьютер, входящий в состав системы формирования магниторезонансного изображения, система формирования магниторезонансного изображения позволяет действовать в соответствии с изобретением и дает возможность системе магниторезонансного исследования выполнять магниторезонансную эластографию за короткое время повторения.
Эти и другие аспекты изобретения будут подробно объяснены со ссылкой на варианты осуществления, описанные далее, и со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
Фиг.1 - схематичное изображение системы формирования магниторезонансного изображения, в которой используется изобретение, и
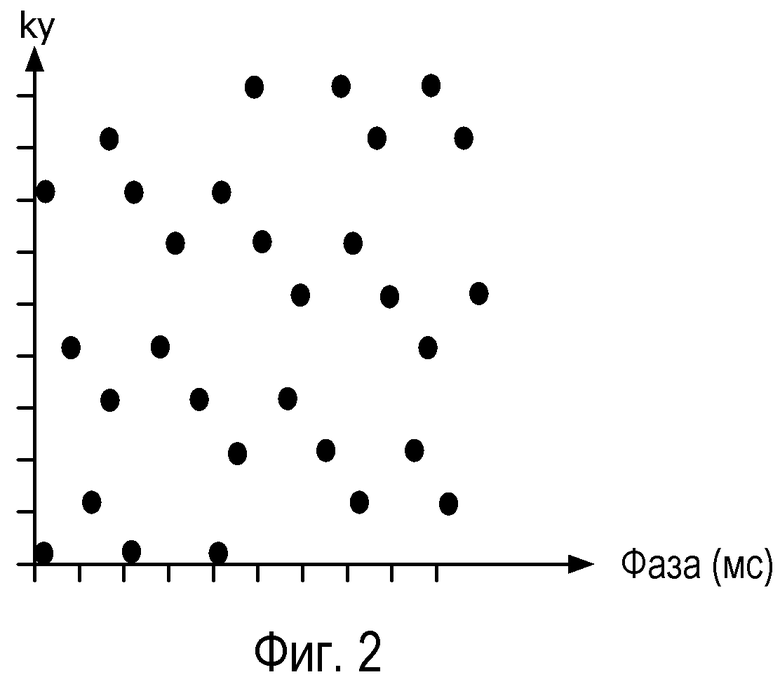
Фиг.2 - пример выборки собранных данных в пространстве выборки.
Подробное описание вариантов осуществления
На Фиг.1 схематично представлена система формирования магниторезонансного изображения, в которой используется изобретение. Система формирования магниторезонансного изображения содержит набор основных катушек 10, посредством которых генерируется постоянное однородное магнитное поле. Основные катушки конструируются, например, таким образом, что они охватывают туннелеобразное пространство для исследования. Обследуемый пациент помещается на тележку для пациента, которая скольжением задвигается в это туннелеобразное пространство для исследования. Система формирования магниторезонансного изображения также содержит множество градиентных катушек 11, 12, посредством которых магнитные поля, обеспечивающие пространственные изменения, особенно в форме временных градиентов в отдельных направлениях, генерируются так, чтобы накладываться на однородное магнитное поле. Градиентные катушки 11, 12 соединяются с блоком 21 управления градиентом, содержащим один или более градиентных усилителей и управляемый блок электропитания. Градиентные катушки 11, 12 возбуждаются подачей электрического тока от блока 21 электропитания; с этой целью блок электропитания снабжен электронной схемой градиентного усиления, которая подает электрический ток на градиентные катушки, чтобы генерировать градиентный импульс (также называемый "градиентные формы волн") соответствующей временной формы. Сила, направление и продолжительность градиентов управляются устройством управления блока электропитания. Система формирования магниторезонансного изображения также содержит передающую и приемную катушки 13, 16 для генерирования импульсов высокочастотного возбуждения и, соответственно, для считывания сигналов магнитного резонанса. Передающая катушка 13 предпочтительно конструируется как катушка 13 для тела, посредством которой может быть охвачен обследуемый объект (часть объекта). Катушка для тела обычно располагается в системе формирования магниторезонансного изображения таким образом, что обследуемый пациент 30 располагается внутри катушки 13 для тела, когда он или она располагается в системе формирования магниторезонансного изображения. Катушка 13 для тела действует в качестве передающей антенны для передачи высокочастотных импульсов возбуждения и высокочастотных импульсов перефокусировки. Предпочтительно, катушка 13 для тела обеспечивает пространственно однородное распределение интенсивности передаваемых высокочастотных импульсов (RFS). Одна и та же катушка или антенна обычно поочередно используется в качестве передающей катушки и приемной катушки. Дополнительно, передающая и приемная катушки обычно формируются как катушка, но также возможны и другие конструкции, в которых передающая и приемная катушки действуют как передающая и приемная антенна для высокочастотных электромагнитных сигналов. Катушка 13 передачи и приема соединяется с электронной схемой 15 передачи и приема.
Следует заметить, что альтернативно возможно использовать отдельные приемную и/или передающую катушки 16. Например, поверхностные катушки 16 могут использоваться в качестве приемных и/или передающих катушек. Такие поверхностные катушки обладают высокой чувствительностью в сравнительно небольшом объеме. Приемные катушки, такие как поверхностные катушки, соединяются с демодулятором 24 и принятые сигналы магнитного резонанса (MS) демодулируются посредством демодулятора 24. Демодулированные сигналы (DMS) магнитного резонанса подаются на блок реконструкции. Приемная катушка соединяется с предварительным усилителем 23. Предварительный усилитель 23 усиливает высокочастотный сигнал магнитного резонанса (MS), принятый приемной катушкой 16, и усиленный высокочастотный резонансный сигнал подается на демодулятор 24. Демодулятор 24 демодулирует усиленный высокочастотный резонансный сигнал. Демодулированный резонансный сигнал содержит фактическую информацию о локальной плотности спинов в части объекта, которая будет отображаться. Дополнительно, схема 15 передачи и приема соединяется с модулятором 22. Модулятор 22 и схема 15 передачи и приема активируют передающую катушку 13, чтобы передавать высокочастотные импульсы возбуждения и перефокусировки. В частности, поверхностные приемные катушки 16 соединяются со схемой передачи и приема посредством беспроводной связи. Данные сигнала магнитного резонанса, принятые поверхностной катушкой 16, передаются на схему 15 передачи и приема, и сигналы управления (например, настройки и расстройки поверхностных катушек) посылаются на поверхностные катушки посредством беспроводной связи.
Блок реконструкции извлекает один или более сигналов изображения из демодулированных сигналов магнитного резонанса (DMS), где сигналы изображения представляют информацию об изображении для изображаемой части обследуемого объекта. Альтернативно, из усиленных высокочастотных сигналов магнитного резонанса (RF) производится выборка блоком выборки ADC, который затем подает сигналы выборки в цифровой форме на реконструктор. Блок 25 реконструкции на практике предпочтительно конструируется как блок 25 цифровой обработки изображений, который программируется, чтобы извлекать из демодулированных сигналов магнитного резонанса сигналы изображения, представляющие информацию изображения части отображаемого объекта. Сигнал присутствует на выходе монитора 26 реконструкции, так что монитор может отображать магниторезонансное изображение. Альтернативно возможно сохранить сигнал с выхода блока 25 реконструкции в буферном блоке 27 для ожидания последующей обработки.
Система формирования магниторезонансного изображения, соответствующая изобретению, также снабжена блоком 20 управления 20, например, в форме компьютера, содержащего (микро)процессор. Блок 20 управления управляет выполнением высокочастотных возбуждений и приложением временных градиентных полей. С этой целью, компьютерная программа, соответствующая изобретению, загружается, например, в блок 20 управления и блок 25 реконструкции.
Система магниторезонансного исследования, показанная на Фиг.1, в частности, выполнена с возможностью осуществления магниторезонансной эластографии (MRE). Система магниторезонансного исследования снабжена приводами 41, которые прикладывают механические колебания к телу обследуемого пациента, чтобы в теле пациента генерировались механические волны. Вариант осуществления, показанный на Фиг.1, имеет два привода 41, работающих на разных частотах колебаний. Эти два привода генерируют широкую пространственную область, в которой генерируются механические волны. Поскольку каждый привод действует в своей собственной узкой полосе частот в области нескольких сотен Герц, разрушительных интерференций в широкой пространственной области удается избежать. Дополнительно, блок 20 управления содержит модуль 42 MRE, управляющий аспектами MRE системы магниторезонансного исследования. То есть, модуль 42 MRE управляет приводом 41. Дополнительно модуль 42 MRE соединяется с реконструктором 23, чтобы применять фазу механического колебания, приложенного к телу пациента, к реконструктору. Реконструктор принимает (демодулированные) сигналы магнитного резонанса, как объяснялось, а также фазу механического колебания. В соответствии с этой реализацией изобретения, реконструктор программируется так, чтобы собирать сигналы магнитного резонанса для каждого этапа фазового кодирования при различных значениях фазы механического колебания. Дополнительно, реконструктор содержит арифметические функции для вычисления постоянной составляющей, динамической амплитуды и фазы механических волн, генерируемых в теле пациента. Модуль 42 MRE также сообщает частоты колебания каждого привода 41. Эта частота учитывается реконструктором для реконструкции волновой структуры в теле пациента.
В более широком плане, может использоваться множество приводов N. То есть, тело пациента окружается множеством, составляющим N приводов. Они нумеруются как υ = 1, …, N. Все эти приводы вызывают в теле колебания, причем каждый привод имеет немного отличающуюся частоту вибраций, представленную как ωυ.
Каждая из этих вибраций, то есть, механических колебаний, вызывает для каждого положения 


Цель измерения и реконструкции (подробности далее) состоит в том, чтобы реконструировать
Измерение предназначено для того, чтобы собрать для каждого "профиля" k-пространства множество результатов измерений, избегая полной синхронности с любой из частот привода и, возможно, при некоторой случайности времени TR повторения. "Профиль" означает любой заданный субнабор k-пространства, но чаще всего он относится к линии константы k y и k z. Для простоты результат описывается для того, что имеется в виду как "наиболее распространенная" (то есть, декартова) схема. Представим, что каждый профиль заданных k y и k z измеряется в итоге М раз (фактически М может различаться для каждого профиля, но здесь это не критично). Эти сборы данных будут происходить в моменты времени tky,kz,u, где u=1,..., М (времена относительно любого произвольно выбранного момента отсчета во времени). Предпочтительно, M > 2N + 1.
Задача реконструкции состоит в вычислении
Смещения в любой момент времени в любом положении в пространстве задаются суммой смещений, вызванных всеми приводами, то есть, 

Здесь 

Данные измерений могут быть выражены как

Здесь F означает преобразование Фурье.
Чтобы подробно объяснить это далее, вводятся несколько кратких символов



Вдобавок к этому, синусоида разлагается на экспоненциальные функции sin(a)= (exp(ia) - exp(-ia))/2t и мы получаем

Теперь обозначение ξ должно быть преобразованием Фурье для х, например, ξ
o
(

Нижние индексы k y, k z для краткости опущены. Таким образом, значения w uυ отличаются для каждого профиля, но это не меняет ход рассуждений.
То, что мы видим выше, является линейной системой уравнений; набор из М уравнений с 2N+1 неизвестными. Система может быть решена для ξ. Преобразование Фурье для этого дает наборы данных 



Это позволяет вычислять для каждого положения внутри измеренного пространства амплитуду и фазу вибрации, вызванной любым из приводов.
В принципе, информация любого из приводов достаточна, чтобы оценить свойства ткани в любом месте; однако результаты этого вычисления могут быть довольно неточными, если привод отдален от рассматриваемой области.
Если мы вычисляем свойства ткани, используя данные каждого привода отдельно, мы можем позже рекомбинировать данные адекватным взвешиванием; "адекватный" означает, что для любого места мы, в частности, учитываем данные тех приводов, которые создают самую сильную вибрацию в этом месте.
На Фиг.2 представлен пример выборки собранных данных в пространстве выборки. Как видно на Фиг.2, пространство выборки определяется осями фазы механического колебания ("фаза") и направления фазового кодирования (ky). Пример показывает только десять значений фазового кодирования, но на практике может использоваться гораздо больше значений, например 256 значений. В показанном примере время TR повторения последовательности сбора полевого эха равно 7,2 мс и привод действует на частоте 100 Гц, то есть, привод имеет период 10 мс. Фаза колебания указывается в терминах времени, прошедшего от начала работы привода, 10 мс по модулю (период колебания). Таким образом для каждой ky-линии выборка продвигается вперед на 7,2 мс вдоль фазовой оси. Таким образом для ky= 0,1,2,3,4 измеряются выборки в положениях 0 мс, 7,2 мс, 14,4-10=4,4 мс, 21,6-20=1,6 мс и 28,8-20=8,8 мс. Когда измерение продолжается для 30TR (30*7,2=216 мс), образуется пространство выборки, как показано на Фиг.2. Заметим, что настоящее изобретение позволяет дополнительно уменьшать время сбора данных. Например, когда привод действует на частоте 400 Гц, высокочастотное возбуждение продлится 0,9 мс и считывание займет приблизительно 1 мс, так что время повторения сокращается приблизительно до менее чем 2 мс, как видно из Фиг.2, и для каждого значения ky фазового кодирования измеряются три точки выборки в пространстве выборки. Таким образом, сигналы магнитного резонанса располагаются в пространстве выборки. В этом примере повторное конфигурирование элементов дискретизации автоматически вводится в процесс сбора данных. Альтернативно, фазовое кодирование и фаза привода могут регистрироваться/управляться отдельно и сигналы магнитного резонанса собираются в пространстве выборки так, что для отдельных этапов (значений) фазового кодирования сигналы магнитного резонанса доступны по меньшей мере для трех фаз. Затем, для каждого значения ky фазового кодирования с помощью арифметической функции вычисляют постоянную составляющую, фазу и динамическую амплитуду, основываясь на частоте привода, которая сообщается модулем 42 MRE.
Изобретение относится к способу магниторезонансной эластографии. Способ магниторезонансной эластографии, содержащий этапы, на которых прикладывают механические колебания с периодом (Т) колебания к обследуемому объекту для генерирования в объекте механических волн, применяют последовательность сбора данных магнитного резонанса, чувствительных к движению, со временем ТR повторения, для сбора сигналов магнитного резонанса от объекта, причем последовательность сбора данных содержит применение этапов фазового кодирования в пределах отдельного времени повторения, и при каждом фазовом кодировании регистрируется фаза механических колебаний, при этом время повторения, умноженное на количество фазовых кодирований в пределах одного времени повторения, не равно целочисленному множителю периода колебания, механические колебания генерируются на нескольких частотах колебаний одновременно, и магниторезонансное изображение волновой структуры реконструируют из сигналов магнитного резонанса, собранных в пространстве выборки, определенном зарегистрированной фазой механического колебания и фазовым кодированием. Технический результат - уменьшение времени сбора данных. 3 н. и 3 з.п. ф-лы, 2 ил.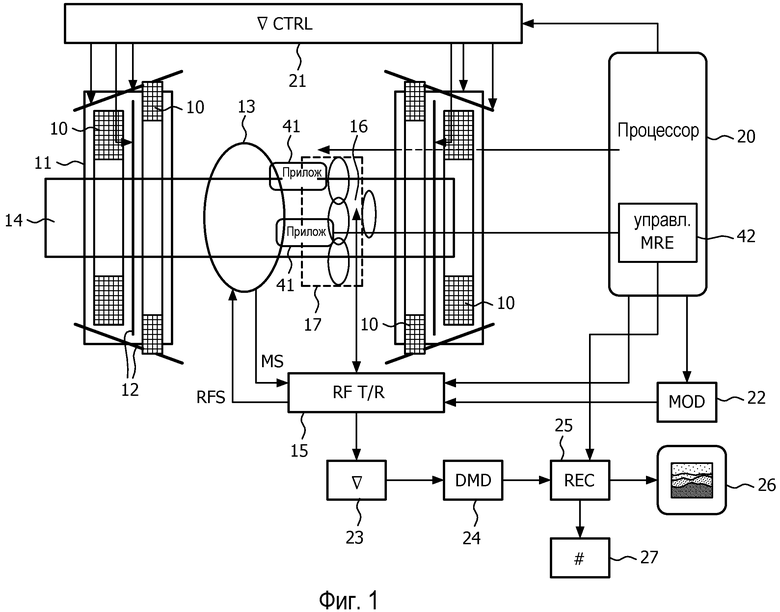
1. Способ магниторезонансной эластографии, содержащий этапы, на которых
- прикладывают механические колебания с периодом (Т) колебания к обследуемому объекту для генерирования в объекте механических волн,
- применяют последовательность сбора данных магнитного резонанса, чувствительных к движению, со временем ТR повторения, для сбора сигналов магнитного резонанса от объекта, - причем последовательность сбора данных содержит применение этапов фазового кодирования в пределах отдельного времени повторения, и
- при каждом фазовом кодировании регистрируется фаза механических колебаний,
- при этом время повторения, умноженное на количество фазовых кодирований в пределах одного времени повторения не равно целочисленному множителю периода колебания, механические колебания генерируются на нескольких частотах колебаний одновременно, и
- магниторезонансное изображение волновой структуры реконструируют из сигналов магнитного резонанса, собранных в пространстве выборки, определенном зарегистрированной фазой механического колебания и фазовым кодированием.
2. Способ магниторезонансной эластографии по п.1, содержащий этапы, на которых
- собирают для каждого фазового кодирования сигналы магнитного резонанса по меньшей мере для трех значений фазы механического колебания,
- извлекают для каждого фазового кодирования постоянную составляющую, динамическую амплитуду и фазу механической волны, и
- реконструируют из этих значений динамической амплитуды и фазы, зависящих от значений фазового кодирования, изображение волновой структуры в объекте.
3. Способ магниторезонансной эластографии по п.2, в котором статическое изображение реконструируют из постоянной составляющей.
4. Способ магниторезонансной эластографии по п.1, содержащий этапы, на которых
- интерполируют сигналы магнитного резонанса в пространстве выборки, определенном фазой механического колебания и фазовым кодированием, и
- реконструируют магниторезонансное изображение волновой структуры из скомпонованных сигналов магнитного резонанса и интерполированных сигналов магнитного резонанса.
5. Система магниторезонансного исследования, содержащая
- привод для приложения механических колебаний к обследуемому объекту и генерирования механических волн в объекте,
- систему радиочастотного возбуждения и градиентную систему для применения последовательности сбора данных магнитного резонанса, чувствительных к движению,
причем последовательность сбора данных магнитного резонанса,
чувствительных к движению, содержит множество этапов фазового кодирования,
- систему радиочастотного приемника для приема сигналов магнитного резонанса, сгенерированных в последовательности сбора данных магнитного резонанса,
- реконструктор для реконструкции магниторезонансного изображения из принятых сигналов магнитного резонанса, скомпонованных в пространстве выборки, определенном фазой механического колебания и фазовым кодированием,
- блок управления для управления системой радиочастотного возбуждения, градиентной системой, приводом и реконструктором,
- блок управления, выполненный с возможностью установки времени повторения механических колебаний, регистрации при каждом фазовом кодировании фазы механических колебаний, установки времени повторения последовательности сбора данных магнитного резонанса, чувствительных к движению, причем количество этапов фазового кодирования не равно целочисленному множителю периода колебания,
- реконструктор, выполненный с возможностью реконструкции магниторезонансного изображения механических волн из сигналов магнитного резонанса, скомпонованных в пространстве выборки, определенном зарегистрированной фазой механического колебания и фазовым кодированием.
6. Носитель данных, содержащий исполняемые компьютером команды, предписывающие компьютеру осуществлять способ магниторезонансной эластографии, содержащий этапы:
- приложения механических колебаний с периодом (Т) колебания
к обследуемому объекту для генерирования механических волн в объекте,
- применения последовательности сбора данных магнитного резонанса, чувствительных к движению, с временем ТR повторения для сбора сигналов магнитного резонанса от объекта, регистрации при каждом фазовом кодировании фазы механических колебаний,
причем последовательность сбора данных содержит применение одного или более этапов фазового кодирования в пределах отдельного времени повторения,
время повторения, умноженное на количество фазовых кодирований в пределах одного времени повторения, не равно целочисленному множителю периода колебания,
собранные сигналы магнитного резонанса компонуются в пространстве выборки, определенном зарегистрированной фазой механического колебания и фазовым кодированием,
магниторезонансное изображение волновой структуры реконструируется из сигналов магнитного резонанса, скомпонованных в пространстве выборки, определенном фазой механического колебания и фазовым кодированием.
| JENS RUMP и др.: "Fractional encoding of harmonic motions in MR elastography", MAGNETIC RESONANCE IN MEDICINE, ACADEMIC PRESS, DULUTH, MN, US, vol | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Уровень с пузырьком | 1922 |
|
SU388A1 |
| US 6833703 B2, 21.12.2004 | |||
| WO 2007118710 A1, 25.10.2007; | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ МАГНИТНОГО РЕЗОНАНСА | 1999 |
|
RU2216751C2 |

