Область техники, к которой относится изобретение
Изобретение относится к томографической медицинской визуализации, в частности - к детектированию движения пациента с помощью пилотных тональных сигналов.
Уровень техники
В методах томографической медицинской визуализации, таких как магнитно-резонансная визуализация, рентгеновская компьютерная томография, позитронно-эмиссионная томография и др., в течение определенного периода времени осуществляют сбор данных от пациента и используют их для восстановления медицинского изображения. Это обеспечивает врачам или другим медицинским работникам точное отображение внутренней анатомии пациента. Недостатком этих методов является то, что во время сбора данных медицинской визуализации пациент может двигаться, что может привести к добавлению артефактов в медицинское изображение.
Существует множество методов коррекции или компенсации движения пациента. Один из методов - это метод с использованием пилотного тонального сигнала. При магнитно-резонансной визуализации для передачи радиочастотного сигнала используют передающую катушку, а для приема этого сигнала используют другую, приемную катушку. Степень связи между пациентом и этими двумя катушками определяет силу принимаемого сигнала. Такие движения, как движение сердца, дыхание и движение тела, можно детектировать по изменению силы сигнала.
В публикации заявки на патент США US20150320342A1 раскрыто магнитно-резонансное устройство, включающее в себя радиочастотный блок, который включает в себя радиочастотную антенну, по меньшей мере одну радиочастотную линию и по меньшей мере одну радиочастотную точку ввода. Радиочастотные сигналы передаются на радиочастотную антенну по меньшей мере одной радиочастотной линией и вводятся в радиочастотную антенну по меньшей мере в одной радиочастотной точке ввода. Магнитно-резонансное устройство также включает в себя зону приема пациента, которая по меньшей мере частично окружена радиочастотной антенной, и блок детектирования движения для детектирования движения пациента, который может быть расположен в зоне приема пациента. По меньшей мере одна радиочастотная линия включает в себя по меньшей мере один элемент ввода, с помощью которого по меньшей мере один сигнал детектирования движения от блока детектирования движения вводится в радиочастотную линию.
В американской патентной заявке US 2015/002331 раскрыта система компьютерной томографии снабженная радиолокационной системой. Эта известная радиоллокационная система выполнена с возможностью детектирования движения в области исследования системы компьютерной томографии.
Раскрытие сущности изобретения
Настоящее изобретение обеспечивает медицинскую систему, компьютерный программный продукт и способ согласно независимым пунктам формулы изобретения. Варианты осуществления приведены в зависимых пунктах формулы изобретения.
Варианты осуществления изобретения могут обеспечить улучшенную систему пилотного тонального сигнала. Это можно реализовать за счет использования множества каналов передачи и множества каналов приема. Множество каналов передачи могут использоваться для передачи многоканального пилотного тонального сигнала, состоящего из уникальных пилотных тональных сигналов. Множество каналов приема принимают эти сигналы как данные многоканальных пилотных тональных сигналов. Это дает гораздо больше информации, чем обычные системы пилотного тонального сигнала. В рамках настоящего изобретения система пилотного тонального сигнала основана на передаче пилотного тонального сигнала в виде электромагнитного сигнала в радиочастотном диапазоне, например 40-400 МГц. Пилотный тональный сигнал передается в режиме непрерывной волны (cw, continuous wave), и данные пилотного тонального сигнала обусловлены импедансным откликом на переданный пилотный тональный сигнал. Этот отклик представлен изменениями амплитуды и фазы данных пилотного тонального сигнала по сравнению с таковыми из переданного пилотного тонального сигнала. То есть данные пилотного тонального сигнала представляют отклик в частотной области на пилотный тональный сигнал, и спектрально-разрешенная информация переносится данными пилотного тонального сигнала.
В одном аспекте изобретение обеспечивает медицинскую систему. Медицинская система содержит память, в которой хранятся машиноисполняемые инструкции. Медицинская система дополнительно содержит процессор, обеспечивающий управление медицинской системой. Медицинская система дополнительно содержит систему пилотного тонального сигнала. Система пилотного тонального сигнала содержит радиочастотную систему. Радиочастотная система содержит множество каналов передачи и множество каналов приема. Каждый из множества каналов передачи выполнен с возможностью передачи уникальных пилотных тональных сигналов с помощью множества передающих катушек. Множество каналов приема выполнены с возможностью приема данных пилотных тональных сигналов с помощью множества приемных катушек. Множество приемных катушек могут быть выполнены с возможностью приема уникальных пилотных тональных сигналов.
Данные пилотного тонального сигнала - это электрические сигналы, генерируемые в множестве каналов приема уникальными пилотными тональными сигналами. Исполнение машиноисполняемых инструкций побуждает процессор передавать многоканальные пилотные тональные сигналы путем управления по меньшей мере частью каналов передачи для передачи уникальных пилотных тональных сигналов. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор собирать данные многоканальных пилотных тональных сигналов путем управления по меньшей мере частью множества каналов приема для приема данных многоканальных пилотных тональных сигналов. Дальнейшее исполнение машиноисполняемых инструкций побуждает процессор определять состояние движения пациента с помощью данных многоканальных пилотных тональных сигналов.
Состояние движения может описывать периодическое движение пациента, такое как дыхание или сердцебиение, а также, в других примерах, оно может описывать грубое движение или движение пациента в целом. Этот вариант осуществления может быть предпочтительным, поскольку он может быть полезен при отслеживании положения или движения пациента во время медицинской процедуры, такой как процедура томографической визуализации.
В другом варианте осуществления радиочастотная система выполнена с возможностью кодирования каждого из уникальных пилотных тональных сигналов с помощью частотного кодирования.
В другом варианте осуществления радиочастотная система выполнена с возможностью кодирования каждого из уникальных пилотных тональных сигналов с помощью фазового кодирования.
В другом варианте осуществления радиочастотная система выполнена с возможностью кодирования каждого из уникальных пилотных тональных сигналов с помощью комплексной модуляции.
В другом варианте осуществления радиочастотная система выполнена с возможностью кодирования каждого из уникальных тональных пилотных тональных сигналов с помощью кодирования CDMA (множественного доступа с кодовым разделением каналов).
В другом варианте осуществления состояние движения пациента является одним из следующего: местоположение движения пациента; вектор движения; классификация движения пациента; состояние дыхания; состояние сердцебиения; вектор поступательного перемещения, характеризующий по меньшей мере часть пациента; вращение, характеризующее по меньшей мере часть пациента; и сочетания вышеперечисленного. Этот вариант осуществления может быть предпочтительным, поскольку все это - различные шаги и движения, которые можно отслеживать с помощью системы с многоканальным пилотным тональным сигналом.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор определять состояние движения с помощью рекуррентной нейронной сети, выполненной с возможностью приема данных многоканальных пилотных тональных сигналов и уникальных пилотных тональных сигналов, а также с возможностью выдачи состояния движения. Уникальные пилотные тональные сигналы, по существу, представляют собой сигналы, передаваемые множеством каналов передачи, а данные многоканальных пилотных тональных сигналов - это данные, принимаемые множеством каналов приема. Они могут вводиться в обученную рекуррентную нейронную сеть для анализа зависящих от времени сигналов от обоих. Это может быть полезно при выдаче состояния движения.
В другом варианте осуществления машиноисполняемые инструкции побуждают процессор определять состояние движения путем определения расстояния между пациентом и каждой из множества приемных катушек. Множество приемных катушек могут быть смещены на некоторое расстояние от пациента. Затем можно использовать силу сигнала для измерения расстояния между пациентом и отдельными приемными катушками. Это позволяет использовать простую модель для отображения местоположения пациента.
В другом варианте осуществления исполнение машиноисполняемых инструкций побуждает процессор определять состояние движения с помощью цифрового фильтра. В системе пилотного тонального сигнала относительно просто детектировать периодическое движение. Например, движение, вызванное сердцем, имеет частотную составляющую, аналогичную частоте сердцебиения. Затем можно использовать цифровой фильтр для отделения сигнала от сердцебиения. Точно так же, движение пациента из-за дыхания также обусловливает частотную составляющую, аналогичную частоте дыхания пациента. Таким образом, цифровой фильтр просто позволяет определять конкретные виды периодического движения.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор определять состояние движения с помощью анализа главных компонент. Этот метод машинного обучения эффективен при детектировании различных типов сигналов, которые могут указывать на движение.
В другом варианте осуществления медицинская система дополнительно содержит систему магнитно-резонансной визуализации.
В другом варианте осуществления система магнитно-резонансной визуализации дополнительно содержит катушку магнитно-резонансной визуализации. Катушка магнитно-резонансной визуализации содержит множество передающих катушек пилотного тонального сигнала и множество приемных катушек. Этот вариант осуществления может быть предпочтительным, потому что передающие катушки пилотного тонального сигнала и множество приемных катушек могут быть легко интегрированы в катушку магнитно-резонансной визуализации.
В другом варианте осуществления система магнитно-резонансной визуализации дополнительно выполнена с возможностью сбора данных магнитно-резонансной визуализации в пределах частотного диапазона визуализации. Множество каналов передачи выполнены с возможностью передачи уникальных пилотных тональных сигналов за пределами частотного диапазона визуализации. Это может быть предпочтительным, потому что тогда электромагнитные сигналы, используемые пилотным тональным сигналом, не будут мешать сбору данных магнитно-резонансной визуализации. Это, например, может обеспечить как сбор данных магнитно-резонансной визуализации, так и одновременное задействование пилотного тонального сигнала.
В другом варианте осуществления память дополнительно содержит команды импульсной последовательности, обеспечивающие управление системой магнитно-резонансной визуализации для сбора данных магнитно-резонансной визуализации. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор управлять системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитно-резонансной визуализации. Исполнение машиноисполняемых инструкций побуждает процессор во время управления системой магнитно-резонансной визуализации с помощью команд импульсной последовательности выполнять следующее: передача многоканальных пилотных тональных сигналов; сбор данных многоканальных пилотных тональных сигналов; и определение состояния движения пациента с помощью данных многоканальных пилотных тональных сигналов. Этот вариант осуществления предпочтителен, потому что состояние движения, определенное из системы пилотного тонального сигнала, может использоваться либо для одновременного управления сбором данных системой магнитно-резонансной визуализации, и/или для последующей корректировки данных магнитно-резонансной визуализации с учетом движения.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор определять текущую частоту градиентных импульсов с помощью команд импульсной последовательности. Текущая частота градиентных импульсов - это частота колебаний градиентных катушек в текущий момент. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор детектировать движение пациента с периодичностью в пределах заданного диапазона текущей частоты градиентных импульсов, используя состояние движения, выведенное из данных многоканальных пилотных тональных сигналов. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор выдавать сигнал, оповещающий о стимуляции периферических нервов, если детектировано движение пациента.
Градиентные катушки в системе магнитно-резонансной визуализации могут генерировать токи или электрические поля в пациенте. Это может вызвать так называемую стимуляцию периферических нервов и привести к движению мышечной ткани пациента. В этом варианте осуществления частота, с которой генерируются градиентные импульсы, сравнивается с данными многоканальных пилотных тональных сигналов. Если определяется, что частотная составляющая превышает заданное пороговое значение, то это может указывать на стимуляцию периферических нервов обследуемого пациента. Эта частота также может сравниваться или коррелироваться с фактическими градиентными сигналами. Это может использоваться для дальнейшего повышения уверенности в том, что происходит стимуляция периферических нервов.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор выбирать альтернативные команды импульсной последовательности, если поступает предупреждение о стимуляции периферических нервов. Например, медицинская система может иметь набор различных команд импульсной последовательности, которые могут использоваться, и если при использовании одной из них детектируют стимуляцию периферических нервов, то система может выбрать альтернативные команды импульсной последовательности.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор изменять команды импульсной последовательности, если поступает предупреждение о стимуляции периферических нервов. Например, процессор может обеспечить изменение частоты или силы различных градиентных импульсов.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор отменять исполнение команд импульсной последовательности, если поступает сигнал, оповещающий о стимуляции периферических нервов. Например, если сигнал, оповещающий о стимуляции периферических нервов, превышает определенное критическое или опасное пороговое значение, то система может автоматически прекратить сбор данных магнитно-резонансной визуализации.
Система пилотного тонального сигнала дополнительно содержит множество передающих катушек и множество приемных катушек.
В другом варианте осуществления медицинская система дополнительно содержит систему томографической визуализации, выполненную с возможностью сбора данных томографической визуализации от пациента в зоне визуализации. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор управлять системой томографической визуализации для сбора данных томографической визуализации. Исполнение машиноисполняемых инструкций побуждает процессор во время управления системой томографической визуализации выполнять следующее для сбора данных томографической визуализации: передавать многоканальные пилотные тональные сигналы; собирать данные многоканальных пилотных тональных сигналов; и определять состояние движения пациента, используя данные многоканальных пилотных тональных сигналов. Этот вариант осуществления может быть предпочтительным, потому что использование пилотного тонального сигнала, кроме только магнитно-резонансной визуализации, может применяться к другим способам визуализации.
В другом варианте осуществления исполнение машиноисполняемых инструкций дополнительно побуждает процессор восстанавливать медицинское изображение с помощью данных томографической визуализации. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор корректировать восстановление медицинского изображения с помощью состояния движения пациента. Например, если известно состояние движения или положение пациента, то это может помочь в компенсации движения пациента при восстановлении медицинского изображения.
В другом варианте осуществления система томографической визуализации представляет собой систему позитронно-эмиссионной томографии.
В другом варианте осуществления система томографической визуализации представляет собой систему однофотонной эмиссионной томографии.
В другом варианте осуществления система томографической визуализации представляет собой систему рентгеновской компьютерной томографии.
В другом варианте осуществления система томографической визуализации содержит опору пациента для поддержки по меньшей мере части пациента в зоне визуализации. По меньшей мере часть множества передающих катушек и по меньшей мере часть множества приемных катушек интегрированы в опору пациента. Это может быть предпочтительным, поскольку может обеспечить эффективное средство интеграции пилотного тонального сигнала в систему томографической визуализации, которая отличается от системы магнитно-резонансной визуализации.
В одном аспекте изобретение обеспечивает компьютерный программный продукт, содержащий машиноисполняемые инструкции для исполнения процессором, управляющим медицинской системой. Медицинская система содержит систему пилотного тонального сигнала. Система пилотного тонального сигнала содержит радиочастотную систему, содержащую множество каналов передачи и множество каналов приема. Каждый из множества каналов передачи обеспечивает передачу уникальных пилотных тональных сигналов с помощью множества передающих катушек. Множество каналов приема обеспечивают прием данных многоканальных пилотных тональных сигналов с помощью множества приемных катушек. Исполнение машиноисполняемых инструкций побуждает процессор передавать многоканальные пилотные тональные сигналы путем управления по меньшей мере частью множества каналов передачи для передачи уникальных пилотных тональных сигналов.
Исполнение машиноисполняемых инструкций дополнительно побуждает процессор собирать данные многоканальных пилотных тональных сигналов путем управления по меньшей мере частью множества каналов приема для приема данных многоканальных пилотных тональных сигналов. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор определять состояние движения пациента с помощью данных многоканальных пилотных тональных сигналов.
В другом аспекте изобретение обеспечивает способ работы медицинской системы. Медицинская система содержит систему пилотного тонального сигнала. Система пилотного тонального сигнала содержит радиочастотную систему, содержащую множество каналов передачи и множество каналов приема. Каждый из множества каналов передачи обеспечивает передачу уникальных пилотных тональных сигналов с помощью множества передающих катушек. Множество каналов приема обеспечивают прием данных многоканальных пилотных тональных сигналов с помощью множества приемных катушек. Способ включает в себя передачу многоканальных пилотных тональных сигналов путем управления по меньшей мере частью множества каналов передачи для передачи уникальных пилотных тональных сигналов. Способ дополнительно содержит сбор данных многоканальных пилотных тональных сигналов путем управления по меньшей мере частью множества каналов приема для приема данных многоканальных пилотных тональных сигналов. Способ дополнительно содержит определение состояния движения пациента с помощью данных многоканальных пилотных тональных сигналов.
В одном из примеров система магнитно-резонансной визуализации содержит память, в которой хранятся машиноисполняемые инструкции и команды импульсной последовательности, обеспечивающие управление системой магнитно-резонансной визуализации для сбора данных магнитно-резонансной визуализации. Система магнитно-резонансной визуализации дополнительно содержит процессор, выполненный с возможностью управления системой магнитно-резонансной визуализации. Система магнитно-резонансной визуализации дополнительно содержит систему пилотного тонального сигнала. Система пилотного тонального сигнала содержит радиочастотную систему, содержащую по меньшей мере один канал передачи и по меньшей мере один канал приема. Множество каналов приема обеспечивают прием данных пилотного тонального сигнала через по меньшей мере один канал передачи.
Исполнение машиноисполняемых инструкций дополнительно побуждает процессор передавать по меньшей мере один пилотный тональный сигнал путем управления по меньшей мере одним каналом передачи. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор собирать данные пилотного тонального сигнала путем управления по меньшей мере одним каналом приема для приема данных пилотного тонального сигнала. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор определять состояние движения пациента с помощью данных пилотного тонального сигнала. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор определять текущую частоту градиентных импульсов с помощью команд импульсной последовательности. Исполнение машиноисполняемых инструкций дополнительно побуждает процессор детектировать движение пациента с периодичностью в пределах заданного диапазона текущей частоты градиентных импульсов, используя данные пилотного тонального сигнала.
Исполнение машиноисполняемых инструкций дополнительно побуждает процессор выдавать сигнал, оповещающий о стимуляции периферических нервов, если детектировано движение пациента. Также может иметься пороговое значение для определения того, превышает ли движение пациента определенный критический уровень или заданный уровень движения, что потребует вмешательства оператора или врача. Движение пациента также может быть детектировано путем определения корреляции между состоянием движения пациента и текущим или фактическим градиентным импульсом, создаваемым градиентными катушками системы магнитно-резонансной визуализации. Этот вариант осуществления может быть предпочтительным, поскольку он может обеспечивать средство автоматического определения того, вызвано ли движение пациента стимуляцией периферических нервов. Это может, например, повысить безопасность системы магнитно-резонансной визуализации, а также быть полезным для улучшения качества изображения за счет уменьшения движения пациента.
В другом варианте осуществления, исполнение машиноисполняемых инструкций дополнительно побуждает процессор, если выдано предупреждение о стимуляции периферических нервов, обеспечивать что-либо из следующего: выбор альтернативных команд импульсной последовательности, изменение команд импульсной последовательности, отмена исполнения команд импульсной последовательности и отображение видимого или звукового сигнала.
В другом варианте осуществления система магнитно-резонансной визуализации дополнительно содержит катушку магнитно-резонансной визуализации. Катушка магнитно-резонансной визуализации содержит по меньшей мере одну передающую катушку пилотного тонального сигнала и по меньшей мере одну приемную катушку. В другом варианте осуществления система магнитно-резонансной визуализации содержит опору пациента, при этом по меньшей мере часть по меньшей мере одной передающей катушки пилотного тонального сигнала и по меньшей мере одна приемная катушка интегрированы в опору пациента.
В другом варианте осуществления система магнитно-резонансной визуализации выполнена с возможностью сбора данных магнитно-резонансной визуализации в пределах частотного диапазона визуализации. Множество каналов передачи обеспечивают передачу уникальных пилотных тональных сигналов за пределами частотного диапазона изображения. Это может быть предпочтительным, поскольку работа системы пилотного тонального сигнала не мешает сбору данных магнитно-резонансной визуализации.
В другом варианте осуществления по меньшей мере один канал передачи представляет собой множество каналов передачи.
В другом варианте осуществления по меньшей мере один канал приема представляет собой множество каналов приема.
В другом варианте осуществления по меньшей мере один канал передачи является единственным каналом передачи.
В другом варианте осуществления по меньшей мере один канал приема является единственным каналом приема.
Следует понимать, что один или более из вышеупомянутых вариантов осуществления изобретения могут быть скомбинированы при условии, что комбинируемые варианты осуществления не являются взаимоисключающими.
Как будет понятно специалисту в данной области техники, аспекты настоящего изобретения могут быть реализованы как устройство, способ или компьютерный программный продукт. Соответственно, аспекты настоящего изобретения могут представлять собой полностью аппаратный вариант осуществления, полностью программный вариант осуществления (включая микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т. д.) или вариант осуществления, сочетающий программные и аппаратные аспекты, которые, в общем, в настоящем документе могут упоминаться как «схема», «модуль» или «система». Кроме того, аспекты настоящего изобретения представлять собой компьютерный программный продукт, реализованный в одном или более компьютерно-читаемых носителе (носителях) с реализованным на нем (на них) компьютерно-исполняемым кодом.
Может использоваться любая комбинация одного или более компьютерно-читаемых носителей. Компьютерно-читаемый носитель может быть компьютерно-читаемым сигнальным носителем или компьютерно-читаемым носителем данных. Термин «компьютерно-читаемый носитель данных», используемый в настоящем документе, охватывает любой материальный носитель данных, на котором могут храниться инструкции, выполняемые процессором компьютерного устройства. Компьютерно-читаемый носитель данных может упоминаться как компьютерно-читаемый долговременный носитель данных. Компьютерно-читаемый носитель данных также может называться материальным компьютерно-читаемым носителем. В некоторых вариантах осуществления компьютерно-читаемый носитель данных также может хранить данные, к которым может получить доступ процессор вычислительного устройства. Примеры компьютерно-читаемых носителей информации включают в себя, но не ограничиваются этим: гибкий диск, магнитный жесткий дисковый накопитель, твердотельный жесткий диск, флэш-память, флэш-накопитель USB, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), оптический диск, магнитооптический диск и регистровый файл процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и универсальные цифровые диски (DVD), например диски CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R. Термин «компьютерно-читаемый носитель данных» также относится к различным типам носителей записи, к которым компьютерное устройство может осуществлять доступ через сеть или канал связи. Например, данные могут быть получены через модем, через Интернет или по локальной сети. Компьютерно-исполняемый код, реализованный на компьютерно-читаемом носителе, может передаваться с помощью любой подходящей среды, включая, но не ограничиваясь этим, беспроводную связь, проводную линию, волоконно-оптический кабель, радио и т. д. или любую подходящую комбинацию вышеперечисленного.
Компьютерно-читаемый сигнальный носитель может включать в себя распространяемый сигнал данных с реализованным в нем компьютерно-исполняемым кодом, например, в основной полосе частот или как часть несущей волны. Такой распространяемый сигнал быть любого типа, включая, но не ограничиваясь этим, электромагнитный, оптический или любое подходящее их сочетание. Компьютерно-читаемый сигнальный носитель может быть любым компьютерно-читаемым носителем, который не является компьютерно-читаемым носителем данных и который может передавать, распространять или транспортировать программу, используемую системой, аппаратом или устройством выполнения команд или связанную с ними.
«Компьютерная память» или «память» является примером компьютерно-читаемого носителя данных. Компьютерная память - это любая память, к которой процессор может иметь непосредственный доступ. «Компьютерное хранилище данных» или «хранилище данных» - это еще один пример компьютерно-читаемого носителя данных. Компьютерное хранилище данных - это любой энергонезависимый компьютерно-читаемый носитель данных. В некоторых вариантах осуществления компьютерное хранилище данных также может быть компьютерной памятью или наоборот.
Термин «процессор», используемый в настоящем документе, включает в себя электронный компонент, способный выполнять программу, или компьютерно-исполняемую инструкцию или компьютерно-исполняемый код. Ссылки на компьютерное устройство, содержащее «процессор», следует интерпретировать как возможно содержащее более одного процессора или процессорного ядра. Процессор может быть, например, многоядерным процессором. Процессор также может относиться к совокупности процессоров, находящихся в одной компьютерной системе или распределенных между множеством компьютерных систем. Термин «компьютерное устройство» также следует интерпретировать как возможно относящееся к совокупности или сети компьютерных устройств, каждое из которых содержит процессор или процессоры. Компьютерно-исполняемый код может выполняться множеством процессоров, которые могут находиться в одном компьютерном устройстве или которые даже могут быть распределены по множеству компьютерных устройств.
Компьютерно-исполняемый код может содержать машиноисполняемые инструкции или программу, которая побуждает процессор выполнять один из аспектов настоящего изобретения. Компьютерно-исполняемый код для выполнения операций для аспектов настоящего изобретения может быть написан на любом сочетании одного или более языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, C++ и т. п., и обычные процедурные языки программирования, такие как язык программирования «C» или подобные языки программирования, и скомпилированным в машиноисполняемые инструкции. В некоторых случаях компьютерно-исполняемый код может быть в виде языка высокого уровня или в предварительно скомпилированном виде и использоваться вместе с интерпретатором, который генерирует машиноисполняемые инструкции «на лету».
Компьютерный исполняемый код может выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как автономный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть подключен к компьютеру пользователя по сети любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), либо может быть выполнено соединение с внешним компьютером (например, через Интернет с помощью Интернет-провайдера).
Аспекты настоящего изобретения раскрыты со ссылкой на иллюстрации блок-схем и/или блок-диаграмм способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления изобретения. Понятно, что каждый блок или часть блоков блок-схемы, иллюстраций и/или блок-диаграмм могут быть реализованы с помощью компьютерных программных инструкций в виде компьютерно-исполняемого кода, когда это применимо. Кроме того, следует понимать, что комбинации блоков в различных блок-схемах, иллюстрациях и/или блок-диаграммах, когда они не являются взаимоисключающими, могут быть объединены. Эти компьютерные программные инструкции могут быть предоставлены процессору универсального компьютера, специального компьютера или другого программируемого устройства обработки данных для создания компьютерного устройства, при этом инструкции, исполняемые с помощью процессора компьютера или другого программируемого устройства обработки данных, создают средства для реализации функций/действий, указанных в блоке или блоках блок-схем и/или блок-диаграмм.
Эти компьютерные программные инструкции также могут храниться на компьютерно-читаемом носителе, который может указывать компьютеру, другому программируемому устройству обработки данных или другим устройствам функционировать определенным образом, при этом инструкции, хранящиеся на компьютерно-читаемом носителе, создают продукт, включая инструкции, которые реализуют функцию/действие, указанные в блоке или блоках блок-схем и/или блок-диаграмм.
Компьютерные программные инструкции также могут быть загружены на компьютер, другое программируемое устройство обработки данных или другие устройства, чтобы обусловить последовательность рабочих шагов, выполняемых на компьютере, другом программируемом устройстве или других устройствах для создания компьютерно-реализуемого процесса, при этом инструкции, выполняемые на компьютере или другом программируемом устройстве, обеспечивают процессы для реализации функций/действий, указанных в блоке или блоках блок-схем и/или блок-диаграмм.
Термин «пользовательский интерфейс», используемый в настоящем документе, представляет собой интерфейс, который обеспечивает пользователю или оператору возможность взаимодействия с компьютером или компьютерной системой. «Пользовательский интерфейс» может также называться «устройством взаимодействия c человеком». Пользовательский интерфейс может предоставлять информацию или данные оператору и/или принимать информацию или данные от оператора. Пользовательский интерфейс может обеспечивать прием компьютером входного сигнала от оператора и может обеспечивать пользователю выходной сигнал от компьютера. Иначе говоря, пользовательский интерфейс может обеспечивать оператору возможность управления или манипулирования компьютером, при этом интерфейс может обеспечивать возможность отображения компьютером результатов управления или манипуляций оператором. Отображение данных или информации на дисплее или графическом пользовательском интерфейсе является примером предоставления информации оператору. Прием данных с помощью клавиатуры, мыши, трекбола, сенсорной панели, тензометрического джойстика, графического планшета, джойстика, геймпада, веб-камеры, гарнитуры, педали, проводной перчатки, пульта дистанционного управления и акселерометра - все это примеры компонентов пользовательского интерфейса, обеспечивающих прием информации или данных от оператора.
Термин «аппаратный интерфейс», используемый в настоящем документе, включает в себя интерфейс, обеспечивающий процессору компьютерной системы возможность взаимодействия с и/или управления внешним компьютерным устройством и/или системой. Аппаратный интерфейс может обеспечить возможность отправки процессором управляющих сигналов или инструкций на внешнее компьютерное устройство и/или систему. Аппаратный интерфейс может также обеспечить процессору возможность обмениваться данными с внешним компьютерным устройством и/или системой. Примеры аппаратного интерфейса включают в себя, но не ограничиваются этим: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, Bluetooth-соединение, соединение беспроводной локальной сети, соединение TCP/IP, Ethernet-соединение, интерфейс управления напряжением, MIDI-интерфейс, интерфейс аналогового ввода и интерфейс цифрового ввода.
Термины «дисплей» или «устройство отображения», используемые в настоящем документе, включают в себя устройство вывода или пользовательский интерфейс, выполненный с возможностью отображения изображений или данных. Дисплей может выводить визуальные, звуковые и/или тактильные данные. Примеры дисплея включают, но не ограничиваются этим: компьютерный монитор, экран телевизора, сенсорный экран, тактильный электронный дисплей, экран Брайля, электронно-лучевую трубку (ЭЛТ), запоминающую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоский дисплей, вакуумный флуоресцентный дисплей (VF), светодиодные (LED) дисплеи, электролюминесцентный дисплей (ELD), плазменные дисплейные панели (PDP), жидкокристаллический дисплей (LCD), дисплеи на органических светодиодах (OLED), проектор и наголовный дисплей.
Данные медицинского изображения определены в настоящем документе как двух- или трехмерные данные, собранные с помощью сканера медицинской визуализации. Сканер медицинской визуализации определяется в настоящем документе как устройство, выполненное с возможностью сбора информации о физическом строении пациента и построения наборов данных двумерного или трехмерного медицинского изображения. Данные медицинского изображения могут использоваться для построения визуализаций, которые могут быть полезны врачу для диагностики. Такую визуализацию можно выполнить с помощью компьютера.
Магнитно-резонансные (МР) данные определяются в настоящем документе как зарегистрированные измерения радиочастотных сигналов, излучаемых атомными спинами, с помощью антенны магнитного-резонансной системы во время сканирования магнитно-резонансной визуализации. Магнитно-резонансные данные являются примером данных медицинского изображения. Изображение магнитно-резонансной визуализации (МРВ) или МР-изображение определяется в настоящем документе как восстановленная двух- или трехмерная визуализация анатомических данных, содержащихся в данных магнитно-резонансной визуализации. Такую визуализацию можно осуществить с помощью компьютера.
Краткое описание чертежей
Далее предпочтительные варианты осуществления изобретения будут раскрыты только в качестве примера и с рассмотрением чертежей, на которых:
на фиг. 1 представлен пример медицинской системы;
на фиг. 2 показана блок-схема, иллюстрирующая способ работы медицинской системы по фиг. 1;
на фиг. 3 представлен еще один пример медицинской системы;
на фиг. 4 показана блок-схема, иллюстрирующая способ работы медицинской системы по фиг. 3;
на фиг. 5 представлен еще один пример медицинской системы;
на фиг. 6 показана блок-схема, иллюстрирующая способ работы медицинской системы по фиг. 5;
на фиг. 7 представлен еще один пример медицинской системы;
на фиг. 8 представлена блок-схема, иллюстрирующая способ работы медицинской системы по фиг. 5;
на фиг. 9 показан пример данных многоканальных пилотных тональных сигналов;
на фиг. 10 показан пример состояния движения, выведенного из данных многоканальных пилотных тональных сигналов по фиг. 9;
на фиг. 11 показан пример комбинированной катушки магнитно-резонансной визуализации и пилотного тонального сигнала;
на фиг. 12 показан пример системы программного обеспечения для медицинской системы; и
на фиг. 13 показан еще один пример системы программного обеспечения для медицинской системы.
Осуществление изобретения
Одинаково пронумерованные элементы на указанных выше фигурах являются либо эквивалентными элементами, либо выполняют одну и ту же функцию. Элементы, которые обсуждались ранее, не обязательно будут обсуждаться применительно к следующим чертежам, если функция эквивалентна.
На фиг. 1 представлен пример медицинской системы 100. Медицинская система 100 показана исследующей пациента 102. Пациент 102 показан лежащим на опоре 104 пациента. Опора 104 пациента является опциональной. Медицинская система 100 содержит систему 106 пилотного тонального сигнала. Система пилотного тонального сигнала имеет радиочастотную систему 108 с множеством каналов 110 передачи и множеством каналов 112 приема. Множество каналов 110 передачи связаны с множеством передающих катушек 114. Множество каналов приема 112 связаны с множеством приемных катушек 116. Медицинская система 100 дополнительно показана содержащей компьютер 120, который включает в себя процессор 122. Подразумевается, что процессор 122 представляет собой один или более процессоров.
Например, процессор 122 может представлять собой множество процессорных ядер, а также процессоры 122, распределенные по множеству компьютерных систем. Процессор 122 связан с аппаратным интерфейсом 124, который обеспечивает процессору 122 возможность управления другими компонентами медицинской системы 100. Например, аппаратный интерфейс 124 также может функционировать как сетевой интерфейс и обеспечивать процессору 122 возможность связи с другими процессорами и/или компьютерными системами. Компьютер 120 также показан содержащим опциональный пользовательский интерфейс 126, который, например, может использоваться оператором для управления медицинской системой 100. Компьютер 120 также показан содержащим память 128.
Память 128 может быть любой комбинацией памяти, доступной процессору 122. Она может включать в себя такое как основная память, кэшированная память, а также энергонезависимая память, например флэш-память RAM, жесткие диски или другие устройства хранения данных. В некоторых примерах память 128 может рассматриваться как долговременный компьютерно-читаемый носитель.
Память 128 показана содержащей машиноисполняемые инструкции 130. Машиноисполняемые инструкции 130 обеспечивают процессору 122 возможность управления работой и функцией медицинской системы 100. Например, машиноисполняемые инструкции 130 также могут обеспечивать процессору 122 возможность выполнения различного анализа данных и методов обработки изображений. Память 128 дополнительно показана содержащей уникальные пилотные тональные сигналы 132, которые были созданы для каждого из множества каналов 110 передачи. Уникальный пилотный тональный сигнал 132, например, может быть передан с помощью процессора 122 в радиочастотную систему 108 для передачи. Память 128 дополнительно показана содержащей данные 134 многоканальных пилотных тональных сигналов. Данные 134 многоканальных пилотных тональных сигналов представляют собой оцифрованные данные, записанные с помощью множества каналов 112 приема. Каналы передачи передают уникальные пилотные тональные сигналы 132, и это приводит к приему каналами приема некоторой части этих сигналов. Это - данные 134 многоканальных пилотных тональных сигналов.
Комбинация уникальных пилотных тональных сигналов 132 приводит к совместной передаваемой совокупности многоканальных пилотных тональных сигналов. Память 128 дополнительно показана содержащей состояние 136 движения, которое было вычислено с помощью данных 134 многоканальных пилотных тональных сигналов и уникальных пилотных тональных сигналов 132 или многоканальных пилотных тональных сигналов. Состояние 136 движения может быть вычислено с помощью множества различных моделей для методов обработки сигналов. В одном из примеров память 128 показана содержащей рекуррентную нейронную сеть 138. Рекуррентная нейронная сеть 138 принимает уникальные пилотные тональные сигналы 132, причем данные 134 многоканальных пилотных тональных сигналов подаются на вход, а затем выдает состояние 136 движения.
В одном из примеров, показанном на фиг. 1, компоненты системы пилотного тонального сигнала также встроены в опору пациента. Например, система пилотного тонального сигнала может полностью находиться в опоре пациента. Это могло бы, например, обеспечить возможность добавления системы пилотного тонального сигнала к системе медицинской визуализации, такой как система магнитно-резонансной визуализации или рентгеновская система, с помощью опоры пациента. Опора пациента также может использоваться для различных методов визуализации, например, для магнитно-резонансной визуализации. Одну опору пациента можно было бы перемещать в другую систему визуализации, а также в системы визуализации другого типа.
На фиг. 2 показана блок-схема, иллюстрирующая способ работы медицинской системы 100 по фиг.1. Сначала на шаге 200 многоканальные пилотные тональные сигналы 132 передают путем управления по меньшей мере частью множества каналов 110 передачи. Многоканальные пилотные тональные сигналы представляют собой совокупность отдельных уникальных пилотных тональных сигналов 132. Затем на шаге 202 собирают данные 134 многоканальных пилотных тональных сигналов путем управления по меньшей мере частью множества каналов 112 приема.
Наконец, на шаге 204 состояние 136 движения пациента 102 определяют с помощью данных 134 многоканальных пилотных тональных сигналов. В случае рекуррентной нейронной сети 138 возможно, что будут вводиться как данные 134 многоканальных пилотных тональных сигналов, так и индивидуальные уникальные пилотные тональные сигналы 132. В других случаях состояние 136 движения может быть определено на основании только данных 134 многоканальных пилотных тональных сигналов. Например, периодическое движение дыхания или сердцебиения пациента 102 может обусловить наличие частотной составляющей данных 134 многоканальных пилотных тональных сигналов, которая равна или приблизительно равна частоте сердечных сокращений и/или частоте дыхания. Поэтому движение сердцебиения и/или дыхания может определяться только данными 134 многоканальных пилотных тональных сигналов.
На фиг. 3 показан еще один пример медицинской системы 300. Медицинская система 300 на фиг. 3 аналогична медицинской системе 100 на фиг. 1, за исключением того, что медицинская система 300 дополнительно содержит систему 302 томографической визуализации. Система томографической визуализации может, например, быть системой позитронно-эмиссионной томографии, системой однофотонной эмиссионной томографии или системой рентгеновской компьютерной томографии. В этом примере система 302 томографической визуализации обладает цилиндрической симметрией; однако это не является обязательным требованием. Опора 104 пациента показана поддерживающей часть пациента 102 в зоне 304 визуализации. Зона 304 визуализации - это место в пространстве, где система 302 томографической визуализации может собирать данные 312 томографической визуализации.
Память 128 дополнительно показана содержащей управляющие команды 310, обеспечивающие процессору 122 возможность управления системой 302 томографической визуализации для сбора данных 312 томографической визуализации. Память 128 показана дополнительно содержащей данные 312 томографической визуализации, собранные путем управления системой 302 томографической визуализации с помощью управляющих команд 310. Память 128 показана дополнительно содержащей томографическое медицинское изображение 314, восстановленное на основании данных 312 томографической визуализации. Одновременно с данными 312 томографической визуализации, например, можно собирать данные 134 многоканальных пилотных тональных сигналов. Это позволяет применять много факторов для учета движения пациента 102. Например, данные 134 многоканальных пилотных тональных сигналов и результирующее состояние 136 движения можно использовать для стробирования сбора данных 312 томографической визуализации. В других примерах движение пациента 102 может быть определено более подробно, а состояние 136 движения может использоваться во время восстановления томографического медицинского изображения 314.
На фиг. 4 показана блок-схема, иллюстрирующая способ работы медицинской системы 300 по фиг. 3. Сначала на шаге 400 процессор 122 управляет системой 302 томографической визуализации с помощью управляющей команды 310. Совместно с этим выполняются шаги 200, 202 и 204, показанные на фиг. 2.
На фиг. 5 показан еще один пример медицинской системы 500. Медицинская система на фиг. 5 подобна медицинской системе 300 на фиг. 3, за исключением того, что система томографической визуализации, в частности, представляет собой систему 502 магнитно-резонансной визуализации.
Система 502 магнитно-резонансной визуализации содержит магнит 504. Магнит 504 представляет собой сверхпроводящий магнит цилиндрического типа с проходящим сквозь него туннелем 506. Также возможно использование разных типов магнитов; например, также можно использовать как раздельный цилиндрический магнит, так и так называемый открытый магнит. Раздельный цилиндрический магнит аналогичен стандартному цилиндрическому магниту, за исключением того, что криостат разделен на две части, чтобы обеспечить доступ к изоплоскости магнита, такие магниты могут, например, использоваться в сочетании с терапией пучком заряженных частиц. Открытый магнит имеет две магнитные секции, одну над другой, с пространством между ними, достаточным для размещения пациента: расположение двух секций аналогично расположению катушки Гельмгольца. Открытые магниты популярны, потому что пациент менее ограничен. Внутри криостата цилиндрического магнита находится набор сверхпроводящих катушек.
Внутри туннеля 506 цилиндрического магнита 504 находится зона 508 визуализации, где магнитное поле является сильным и достаточно однородным для выполнения магнитно-резонансной визуализации. В зоне 508 визуализации показана исследуемая область 509. Собираемые данные магнитного резонанса обычно собирают для исследуемой области. Пациент 102 показан поддерживаемым опорой 104 пациента так, чтобы по меньшей мере часть пациента 102 находилась внутри зоны 508 визуализации и исследуемой области 509.
Внутри туннеля 506 магнита также имеется набор градиентных катушек 510 магнитного поля, используемых для сбора предварительных данных магнитного резонанса для пространственного кодирования магнитных спинов в зоне 508 визуализации магнита 504. Градиентные катушки 510 магнитного поля подключены к источнику 512 питания градиентных катушек магнитного поля. Градиентные катушки 510 магнитного поля должны быть типовыми. Обычно градиентные катушки 510 магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник питания градиентного магнитного поля подает ток на градиентные катушки магнитного поля. Ток, подаваемый на градиентные катушки 510 магнитного поля, регулируется как функция времени и может быть линейным или импульсным.
Внутри туннеля 506 магнита 504 находится антенна 514 для магнитно-резонансной визуализации. Показано, что антенна 514 для магнитно-резонансной визуализации содержит множество передающих катушек 114 и множество приемных катушек 116. Антенна 514 для магнитно-резонансной визуализации также содержит ряд радиочастотных катушек 516, которые используются для выполнения магнитно-резонансной визуализации. Радиочастотная система 108 также связана с радиочастотной катушкой 516. Устройство, показанное на фиг. 5, позволяет собирать данные магнитно-резонансной визуализации одновременно с помощью системы пилотного тонального сигнала. В других примерах радиочастотные катушки 516 также могут функционировать как множество приемопередающих катушек 114 и/или множество приемных катушек 116.
Радиочастотные катушки 516 также могут упоминаться как канал или антенна. Магнитно-резонансная антенна 514 связана с радиочастотной системой 108. Магнитно-резонансная антенна 514 и радиочастотная система 108 могут быть заменены отдельными передающими и приемными катушками и отдельными передатчиком и приемником. Понятно, что магнитно-резонансная антенна 514 и радиочастотная система 108 являются типовыми. Подразумевается, что магнитно-резонансная антенна 514 также представляет собой специальную передающую антенну и специальную приемную антенну. Аналогично, система 516 может также представлять собой отдельные передатчик и приемники. Магнитно-резонансная антенна 514 также может иметь множество приемных/передающих элементов, а радиочастотная система 108 может иметь множество каналов приема/передачи. Например, если реализуется метод параллельной визуализации, такой как SENSE, то радиочастотная система 108 может иметь множество катушечных элементов.
Радиочастотная система 516 и градиентный контроллер 512 показаны подключенными к аппаратному интерфейсу 124 компьютерной системы 128. Память 128 показана содержащей команды 530 импульсной последовательности вместо управляющих команд. Команды 530 импульсной последовательности представляют собой команды или данные, которые могут быть преобразованы в команды, используемые для управления работой системы 502 магнитно-резонансной визуализации. Память 128 дополнительно показана содержащей данные 532 магнитно-резонансной визуализации, собранные путем управления системой магнитно-резонансной визуализации с помощью команд 530 импульсной последовательности.
Память 128 дополнительно показана содержащей магнитно-резонансное изображение 534, восстановленное на основании данных 532 магнитно-резонансной визуализации. Как и в медицинской системе 300 по фиг. 3, состояние 136 движения может использоваться по-разному. Например, состояние 136 движения может использоваться для синхронизации сбора данных 532 магнитно-резонансной визуализации, а также использоваться при восстановлении магнитно-резонансного изображения 534.
На фиг. 6 показан способ управления медицинской системой 500 по фиг. 5. Сначала на шаге 600 системой 502 магнитно-резонансной визуализации управляют с помощью команд 530 импульсной последовательности для сбора данных 534 магнитно-резонансной визуализации. При выполнении шага 600 совместно выполняют шаги 200, 202 и 204 по фиг. 2.
На фиг. 7 показан еще один пример медицинской системы 700. Медицинская система на фиг. 7 аналогична системе по фиг. 5. Однако есть несколько изменений. Множество передающих катушек 114 также могут быть по меньшей мере одной передающей катушкой 114’. Множество приемных катушек могут быть по меньшей мере одной приемной катушкой 116’. Аналогично, множество каналов приема могут быть по меньшей мере одним каналом 112’ приема, а множество передающих катушек могут быть по меньшей мере одной передающей катушкой 114’.
Память 128 может дополнительно содержать зависящую от времени частоту 710 градиентных импульсов, которая была определена из команд 530 импульсной последовательности. Чтобы определить, есть ли стимуляция периферических нервов у пациента 102, состояние 136 движения можно сравнивать с зависящей от времени частотой 710 градиентных импульсов. Если состояние движения коррелирует выше определенной степени или выше определенной амплитуды в том же диапазоне частот, что и детектированное движение, то может быть сгенерирован сигнал 712, оповещающий о стимуляции периферических нервов.
На фиг. 8 показана блок-схема, иллюстрирующая способ работы медицинской системы 700 по фиг. 7. Способ аналогичен способу, показанному на фиг. 6. Сначала шаги 600, 200, 202, 204 выполняются, как на фиг. 6. После выполнения шага 204 или до выполнения шага 800 частоту 710 зависящих от времени градиентных импульсов определяют с помощью команд 530 импульсной последовательности. Затем на шаге 802 с помощью состояния 136 движения детектируют движение пациента с периодичностью в пределах заданного диапазона или корреляции зависящей от времени частоты градиентных импульсов. Например, состояние движения можно сравнивать с зависящей от времени частотой 710 градиентных импульсов или, например, может быть корреляция, вычисляема «на лету». Наконец, на шаге 804 генерируют сигнал 712, оповещающий о стимуляции периферических нервов, если детектировано движение пациента.
В некоторых примерах пилотный/опорный сигнал может распределяться в массиве катушек или антенне системы магнитно-резонансной визуализации. Полностью цифровая интеграция пилотного тонального сигнала в приемном массиве. Оптимальный пилотный тональный сигнал выбирается матрицей передатчика (Тх) и матрицей приемника (Rx). Отдельные пилотные тональные сигналы могут иметь различную частотную - фазовую - комплексную модуляцию.
При автономной визуализации это может обеспечить детектирование сердечных сокращений без ЭКГ, а также разделение и количественную оценку движения головы и тела в сочетании со способами, основанными на съемке камерой.
Как для сканирования магнитно-резонансной визуализации, так и компьютерной томографии может потребоваться ряд входных параметров и надлежащая подготовка к сканированию. Протокол выбирают и изменяют в соответствии с пациентом в зависимости от размера тела, веса тела, положения пациента и анатомии, подлежащей сканированию. Обычно эти данные вводятся вручную. Физиологические параметры (например, необходимые для запуска сканирования) могут быть измерены с помощью специальных датчиков. Недавно было продемонстрировано, что соответствующие параметры могут быть выведены из прямых видеопотоков камеры, наблюдающей за пациентом во время сканирования.
Во время процедуры МРВ пациент покрыт одеждой и в большинстве применений покрыт радиочастотными катушками, такими как катушки для головы и/или (передней) поверхности. Подход с пилотным тональным сигналом можно использовать в качестве бесконтактного электромагнитного навигатора, который предлагает отслеживание сердечного и дыхательного движения независимо от сбора данных.
Примеры могут иметь одно или более из следующих преимуществ:
- детектирование сердечных сокращений без ЭКГ;
- разделение и количественная оценка движения головы - тела;
- выведение триггера при сердечном и дыхательном движении;
- применение в лучевой терапии с магнитно-резонансным линейным ускорителем (МР-LINAC).
Аналитическая оптимизация десятков входных и выходных параметров высокочастотных датчиков в течение заданного периода времени может быть сложной задачей, учитывая чистое количество параметров и их нелинейные (коэффициент усиления усилителя, фиксированные пределы параметров) взаимозависимости.
Системы детектирования движения на основании съемки камерой страдают от проблем с разбиением в узких отверстиях современных МР- и КТ-сканеров. С другой стороны, системы с одним источником/приемником пилотного тонального сигнала подходят только для выполнения одной функции. Разнообразие пациентов и требования к параметрам затрудняют оптимизацию системы с одним пилотным тональным сигналом.
Отношение сигнал/шум зависит от положения антенны/катушки пилотного тонального сигнала. В ходе экспериментов было определено, что множество каналов могут быть предпочтительны для выделения различных типов и направлений движения головы, при этом существует потребность в источниках многоканального пилотного тонального сигнала, распределенных вокруг головы/пациента. Использование множества каналов может обеспечить одну (одно) или более из следующих признаков или преимуществ:
- кварцевый генератор с фиксированной частотой;
- дополнительный компонент;
- локализация передатчика пилотного тонального сигнала;
- применение ограничено определением сердечного ритма/дыхания;
- рабочий процесс: дополнительный шаг рабочего процесса;
- требуется перезарядка, замена батареи;
- оптимальное отражение и сигнал движения зависит от частоты;
- сигнал зависит от движения тела;
- важен выбор оптимальной частоты
- движение органов (дыхание);
- движение тела и конечностей
Использование множества каналов также может обеспечить возможность измерения одного или более из следующего:
- электрические параметры (диэлектрическая проницаемость и нагрузка);
- нагрузочные условия катушки.
Примеры могут обеспечивать распределенный пилотный/опорный сигнал в массиве катушек. Полностью цифровая интеграция пилотного тонального сигнала в приемном массиве. Это, например, может обеспечить выбор оптимального пилотного сигнала матрицей передатчика (Tx) и матрицей приемника (Rx). Отдельные пилотные тональные сигналы могут отличаться по частотной - фазовой - комплексной модуляции. Путем фильтрации и последующей обработки измеренных данных можно детектировать и различать разные типы движения, даже обеспечивая локализацию движения. Используя N элементов приемной катушки в сочетании с M локальными передатчиками, мы получаем одновременно NxM сигналов. Это позволяет вывести векторы движения.
С помощью полностью цифрового локального передатчика отдельные пилотные тональные сигналы могут быть разделены путем обработки сигнала (например, с помощью метода множественного доступа с кодовым разделением каналов, CDMA). Таким образом, возможен полный параллельный пилотный тональный сигнал (многоканальный пилотный тональный сигнал), включая восстановление изображений с низким разрешением и применение для многополосной МРВ.
На фиг. 9 представлен пример данных 134 многоканальных пилотных тональных сигналов. График, показанный в 134, показывает ряд графиков отдельных измеренных пилотных тональных сигналов. Сердечные сигналы и дыхательные движения хорошо детектируются, но сильно зависят от отдельного канала катушки в отношении того, насколько сильным является сердечный или дыхательный сигнал в каждом из них по отдельности.
Локальные катушки могут принимать узкополосные сигналы, расположенные за пределами полосы изображения (пилотного тонального сигнала). Здесь частота близка к частоте магнитного резонанса (МР). Используя дополнительные радиочастотные (РЧ) каналы, мы интегрируем широкополосные приемные антенны (или другой частоты) в МР катушке. Эти дополнительные РЧ каналы принимают сигналы с модуляцией движения (по амплитуде и фазе) на выбранных частотах, оптимальных для детектирования движения.
Данные (многоканальных пилотных тональных сигналов) также могут подаваться в сверточную нейронную сеть или рекуррентную нейронную сеть. Рекуррентная нейронная сеть (РНС) - это класс искусственной нейронной сети, в которой соединения между узлами образуют ориентированный граф вдоль последовательности. Это позволяет ей демонстрировать динамическое временное поведение для временной последовательности. В отличие от нейронных сетей прямого распространения, сети РНС могут использовать свое внутреннее состояние (память) для обработки последовательностей входных сигналов (здесь - разные частоты). Это делает их применимыми для таких задач, как несегментированное, связное распознавание движения или распознавание движения с помощью пилотного тонального сигнала.
На фиг. 10 показан пример состояния 136 движения, которое было определено на основании многоканальных пилотных тональных сигналов 134 на фиг. 9. На этом графике показаны синтезированный сердечный сигнал 1000 и синтезированный сигнал 1002 дыхания.
На фиг. 11 представлен пример комбинированной системы 1100 с катушками магнитного резонанса и пилотного тонального сигнала. Антенна 1100 содержит ряд катушечных элементов 1102. Катушечные элементы на этой фигуре действуют и как приемные катушки системы магнитно-резонансной визуализации, и как множество приемных катушек 116. Катушки подключены к отдельным радиочастотным системам 108'. В этом примере для каждого канала используется радиочастотная система 108’. Каждый катушечный элемент 1102 связан с цифровым приемным блоком 1104. Цифровой приемный блок связан с контроллером 1110, который может взаимодействовать с остальной частью системы магнитно-резонансной визуализации с помощью оптической системы 1112 связи. Контроллер 1110 также связан с цифровым передатчиком 1106 пилотного тонального сигнала. Цифровой передатчик пилотного тонального сигнала связан с множеством отдельных передающих катушек 114. Уникальные пилотные тональные сигналы передаются по множеству передающих катушек 114. Данные пилотного тонального сигнала затем принимаются катушками 1102. Каждый цифровой передатчик (Тх) пилотного тонального сигнала может иметь локальную антенну (полосковую, диэлектрическую).
На фиг. 11 показан распределенный массив цифровых приемопередатчиков пилотного тонального сигнала. Каждая антенна пилотного тонального сигнала развязана с локальной катушкой МРВ для получения максимальной развязки для предотвращения насыщения предусилителя. Альтернативно, пилотный тональный сигнал подается в предусилитель МР в противофазе, чтобы предотвратить насыщение. Предотвращение насыщения предусилителя выполняется в аналоговой области. Для многополосной МРВ пилотный тональный сигнал может передаваться на отдельных частотах и/или кодироваться.
Частота отдельного передатчика может быть выше, чем частота МРВ. Сигнал с недостаточной дискретизацией свертывается в области изображения и далее обрабатывается.
На фиг. 12 показана блок-схема, иллюстрирующая способ работы медицинских систем 500 и 700 по фиг. 5 и 7. Сначала на шаге 1200 выбирают/принимают последовательность магнитного резонанса для пациента. Затем на шаге 1202 выбирают катушку магнитно-резонансной визуализации. На шаге 1204 определяют опорный и пилотный сигналы. Затем на шаге 1206 происходит выбор антенны пилотного тонального сигнала и этап подготовки. Например, если антенна пилотного тонального сигнала интегрирована в антенну магнитно-резонансной визуализации, то ее можно разместить или расположить на пациенте.
Затем на шаге 1208 передают и принимают пилотные тональные сигналы. Это эквивалентно шагам 200 и 202. Затем на шаге 1210 выполняют обработку пилотных тональных сигналов для определения состояния движения. Это, например, может быть выполнено с помощью обработки сигналов, или с помощью глубокого обучения или других нейронных сетей. Это может быть эквивалентно шагу 204. После шага 1210 могут быть выполнены два независимых шага. На шаге 1212 состояние движения используется для запуска последовательности магнитно-резонансной визуализации. Например, магнитно-резонансная визуализация может запускаться при определенной дыхательной или сердечной фазе. После шага 1210 также может выполняться шаг 1214. На этом шаге состояние движения используется для обработки данных магнитно-резонансной визуализации или для прогнозирования движения пациента, и может использоваться либо для последующей корректировки изображения, либо для корректировки сбора данных в прогнозирующем коэффициенте для повышения качества.
Для распределенного пилотного тонального сигнала система МРВ может определить оптимальное местоположение передатчика и приемника для максимальной чувствительности к пилотному тональному сигналу, как показано на фиг. 12. Пилотные тональные сигналы отправляются одновременно. Декодирование осуществляется путем индивидуальной модуляции отдельных передатчиков.
Еще одним применением является детектирование стимуляции периферических нервов (СПН) во время магнитно-резонансной визуализации. Можно использовать пилотные тональные сигналы, собранные массивом приемных катушек, и обеспечивать их корреляцию с градиентным волновым сигналом для детектирования и запуска детектирования СПН. Полная матрица приемной катушки измеряется и коррелируется с градиентным волновым сигналом для детектирования СПН.
При достижении определенных пороговых значений МР последовательность адаптируют для уменьшения СПН. Последовательность автоматически адаптируется к комфортным для пациента параметрам. Измерение: изменение направления считывания, изменение последовательности, силы градиента, изменение положения пациента. Данные (многоканальных пилотных тональных сигналов) также могут подаваться в сверточную нейронную сеть или рекуррентную нейронную сеть.
Сильные градиенты, применяемые во время МРВ-исследований, могут вызвать стимуляцию периферических нервов, приводящую к движению мышечных волокон или мышц целиком.
При стимуляции периферических нервов (СПН):
- СПН дискомфортна для пациента;
- уровень СПН индивидуален для пациента;
- пределы СПН задаются обобщенно, без учета индивидуальной чувствительности к СПН;
- о СПН не могут сообщить пациенты с физическими недостатками или находящиеся под воздействием седативных средств. Отсутствует количественно оцениваемая обратная связь с оператором;
- СПН не может быть детектирована способами, основанными на съемке камерой;
- СПН может вызвать МР артефакт из-за движения;
- СПН может привести к непреднамеренному сканированию, когда пациент вызывает операторов из-за того, что СПН может быть детектирована с помощью пилотных тональных сигналов, собранных массивом приемных катушек для детектирования СПН.
В общем, ожидается, что вызванные СПН воздействия на пилотные тональные сигналы будут меньше, чем, например, воздействие дыхания. Благодаря этому, а также для отличия от других движений пилотные тональные сигналы, собранные приемной катушкой, могут коррелироваться с градиентным волновым сигналом.
При достижении определенных пороговых значений, МР последовательность адаптируется для уменьшения СПН. Последовательность автоматически адаптируется к комфортным для пациента параметрам. Возможными мерами являются:
- изменение направления считывания,
- изменение последовательности,
- изменение силы градиента,
- изменение положения/позы пациента.
Также могут использоваться дополнительные вспомогательные данные, такие как оптическое детектирование, детектирование с помощью камеры, радара и ультразвуковое акустическое детектирование.
В целях калибровки применяемые в настоящее время МР сканеры оснащены маломощным трактом передачи, независимым от цепи передачи катушки для тела. Здесь небольшая нерезонансная катушка прикреплена к радиочастотному экрану катушки для тела. Мощность передачи для этой катушки была отрегулирована так, чтобы РЧ сигналы были того же порядка, что и сигналы, исходящие от спиновой системы. Для приема используются стандартные катушки МРВ.
Измерения пилотного тонального сигнала можно перемежать или объединять с МР последовательностью. Испытания показали, что такая настройка позволяет детектировать движение, вызванное дыханием. Дальнейшие испытания были проведены для повышения чувствительности настройки.
Выше на фиг. 9 показан пример сигналов с амплитудой пилотного тонального сигнала. Дополнительную информацию можно получить, одновременно наблюдая за фазой собранных сигналов. В ходе испытаний было определено идеальное положение нерезонансной катушки, чтобы обеспечить наиболее точный результат для дыхательного и сердечного движения. В данных экспериментах наилучшей настройкой было размещение катушки поверх грудины пациента. Сбор пилотного тонального сигнала с помощью всех доступных катушек приемника (RX) обеспечивает (ограниченную) пространственную чувствительность. Это понимание можно использовать для различения разных типов движения.
Вероятно, что для детектирования СПН больше подходит другое положение, например, ближе к длинным мышцам спины пациента.
Данные (многоканальных пилотных тональных сигналов) также могут подаваться в сверточную нейронную сеть или рекуррентную нейронную сеть. Рекуррентная нейронная сеть (РНС) - это класс искусственной нейронной сети, в которой соединения между узлами образуют ориентированный граф вдоль последовательности. Это позволяет ей демонстрировать динамические временные характеристики для временной последовательности. В отличие от нейронных сетей прямого распространения, сети РНС могут использовать свое внутреннее состояние (память) для обработки последовательностей входных сигналов (здесь - разные частоты). Это делает их применимыми для таких задач, как несегментированное, соединенное распознавание движения или распознавание движения с помощью камеры (см. фиг. 13 ниже).
На фиг. 13 представлен программный алгоритм и функциональные блоки построения системы, которая, например, может быть включена в систему магнитно-резонансной визуализации, такую как медицинская система 700, представленная на фиг. 7. Блок 1300 представляет систему пилотного тонального сигнала и массив радиочастотных опорных катушек. Блок 1302 представляет градиентный волновой сигнал из команд импульсной последовательности. Блок 1304 представляет программный компонент, который является детектором стимуляции периферических нервов и/или коррелятором 1304. Детектор или коррелятор 1304 может получать информацию о градиентном волновом сигнале 1302 и информацию из данных 1300 пилотного тонального сигнала, чтобы детектировать, есть ли стимуляция периферических нервов. Затем она поступает в контроллер 1306.
Например, контроллер 1306 может быть эквивалентен процессору 122. Затем эта информация может быть перенаправлена или обработана от контроллера и подана в нейронную сеть 1308, которая, например, может быть эквивалентна нейронной сети 138. Контроллер 1306 может использовать детектирование стимуляции периферических нервов, например, для изменения характеристик градиентного усилителя 1310 и, возможно, даже для модификации характеристик или изменения команд 530 импульсной последовательности. Эти данные также могут быть предоставлены на монитор 1314 стимуляции периферических нервов. Это, например, может обеспечиваться с помощью пользовательского интерфейса 126.
Следующая схема, представленная на фиг. 13, показывает, как должны обрабатываться и использоваться данные пилотного тонального сигнала.
- На первом шаге обеспечивают корреляцию данных пилотного тонального сигнала с градиентными волновыми сигналами. В зависимости от уровня корреляции сигналов контроллер решает: корреляция ниже первого порогового значения = нет / низкая СПН: запустить последовательность в соответствии с планом;
- корреляция ниже второго порогового значения = значительная СПН: адаптировать последовательность;
- корреляция выше второго порогового значения = СПН на болевом пределе или ожидаются значительные артефакты изображения: завершить сканирование путем блокировки градиентного усилителя.
Хотя изобретение было проиллюстрировано на чертежах и подробно раскрыто в вышеприведенном описании, такие иллюстрирование и описание следует считать иллюстративными или примерными, а не ограничивающими; изобретение не ограничивается раскрытыми вариантами осуществления.
Другие варианты раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при реализации на практике заявленного изобретения на основе изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов или шагов, а форма единственного числа не исключает множественности. Один процессор или другой блок может выполнять функции нескольких элементов, указанных в формуле изобретения. Тот факт, что конкретные признаки изложены во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих признаков не может быть эффективно использована. Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель данных или твердотельный носитель, поставляемый вместе с другим оборудованием или как его часть, но также может распространяться в других формах, например, по Интернету или другим проводным или беспроводным телекоммуникационным системам. Любые номера позиций в формуле изобретения не следует рассматривать как ограничение его объема.
Список ссылочных обозначений
100 - медицинская система
102 - пациент
104 - опора пациента
106 - система пилотного тонального сигнала
108 - радиочастотная система
108’ - отдельная радиочастотная система
110 - множество каналов передачи
110’ - по меньшей мере один канал передачи
112 - множество каналов приема
112’ - по меньшей мере один канал приема
114 - множество передающих катушек
114’ - по меньшей мере одна передающая катушка
116 - множество приемных катушек
116’ - по меньшей мере одна приемная катушка
120 - компьютер
122 - процессор
124 - аппаратный интерфейс
126 - пользовательский интерфейс
128 - память
130 - машиноисполняемые инструкции
132 - уникальные пилотные тональные сигналы
132’ - один или более пилотных тональных сигналов
134 - данные многоканальных пилотных тональных сигналов
134’ - данные пилотного тонального сигнала
136 - состояние движения
138 - рекуррентная нейронная сеть
200 - передача многоканальных пилотных тональных сигналов путем управления по меньшей мере частью множества каналов передачи для передачи уникальных пилотных тональных сигналов
202 - сбор данных многоканальных пилотных тональных сигналов путем управления по меньшей мере частью множества каналов приема для приема данных многоканальных пилотных тональных сигналов
204 - определение состояния движения пациента с помощью данных многоканальных пилотных тональных сигналов
300 - медицинская система
302 - томографическая система визуализации
304 - зона визуализации
310 - управляющие команды
312 - данные томографической визуализации
314 - томографическое медицинское изображение
400 - сбор данных томографической визуализации от пациента в зоне визуализации
500 - система медицинской визуализации
502 - система магнитно-резонансной визуализации
504 - магнит
506 - туннель магнита
508 - зона визуализации
509 - исследуемая область
510 - градиентные катушки магнитного поля
512 - источник питания градиентной катушки магнитного поля
514 - магнитно-резонансная антенна
516 - радиочастотная катушка
530 - команды импульсной последовательности
532 - данные магнитно-резонансной визуализации
534 - магнитно-резонансное изображение
600 - сбор данных магнитно-резонансной визуализации
700 - медицинская система
710 - частота градиентных импульсов, зависящая от времени
712 - сигнал, оповещающий о стимуляции периферических нервов
800 - определение текущей частоты градиентных импульсов с помощью команд импульсной последовательности
802 - детектирование движения пациента с периодичностью в пределах заданного диапазона текущей частоты градиентных импульсов с помощью данных пилотного тонального сигнала
804 - выдача сигнала, оповещающего о стимуляции периферических нервов, если детектировано движение пациента
1000 - синтезированный сердечный сигнал
1002 - синтезированный сигнал дыхания
1100 - комбинированная катушка МР и пилотного тонального сигнала
1102 - катушка
1104 - цифровой приемник (Rx)
1106 - цифровой передатчик (Tx) пилотного тонального сигнала
1108 - антенна для пилотного тонального сигнала
1110 - контроллер
1112 - оптическая связь.
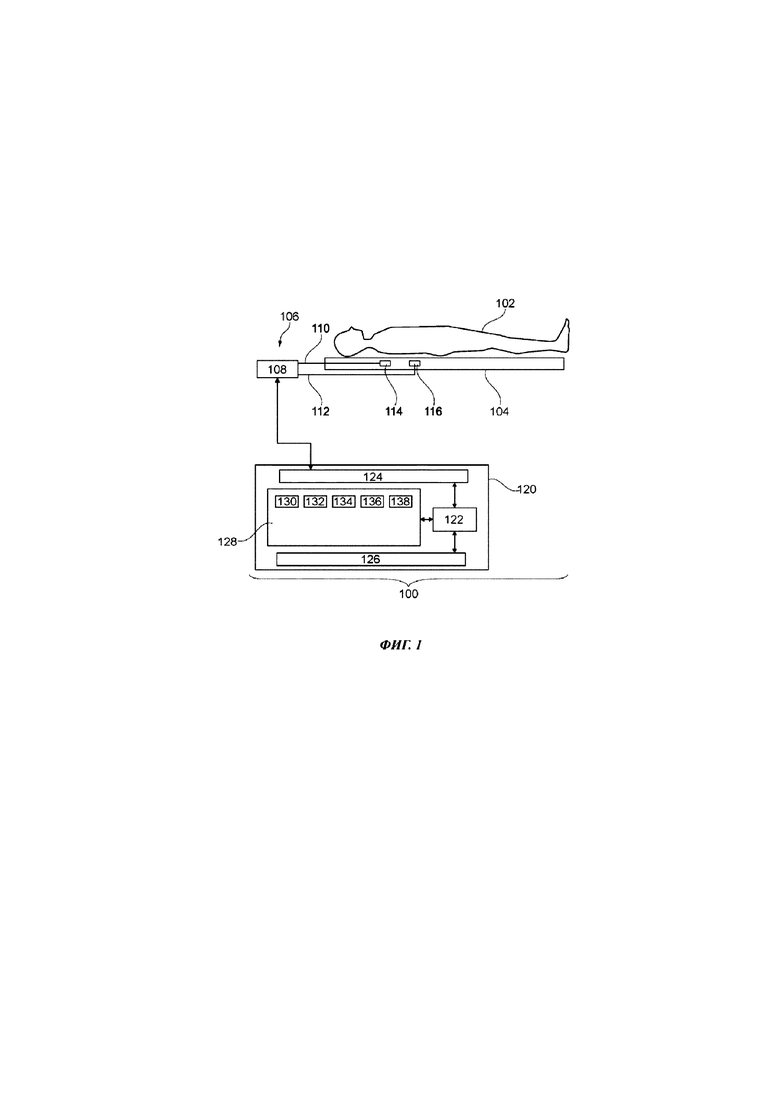
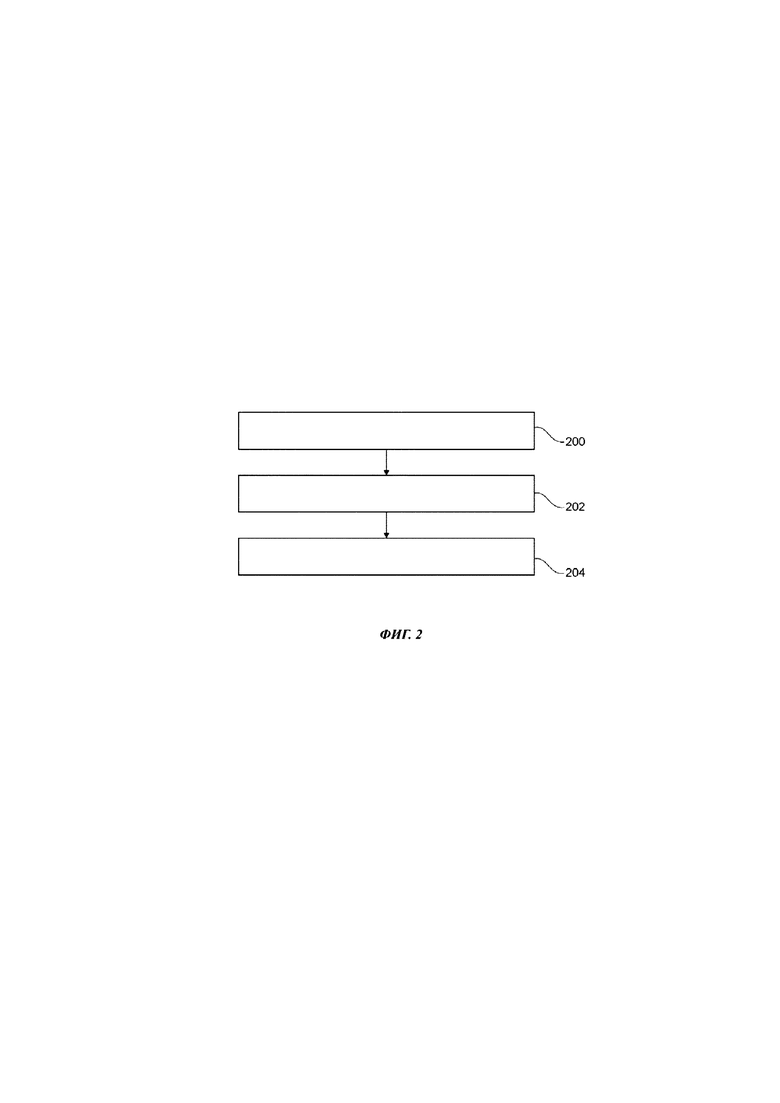
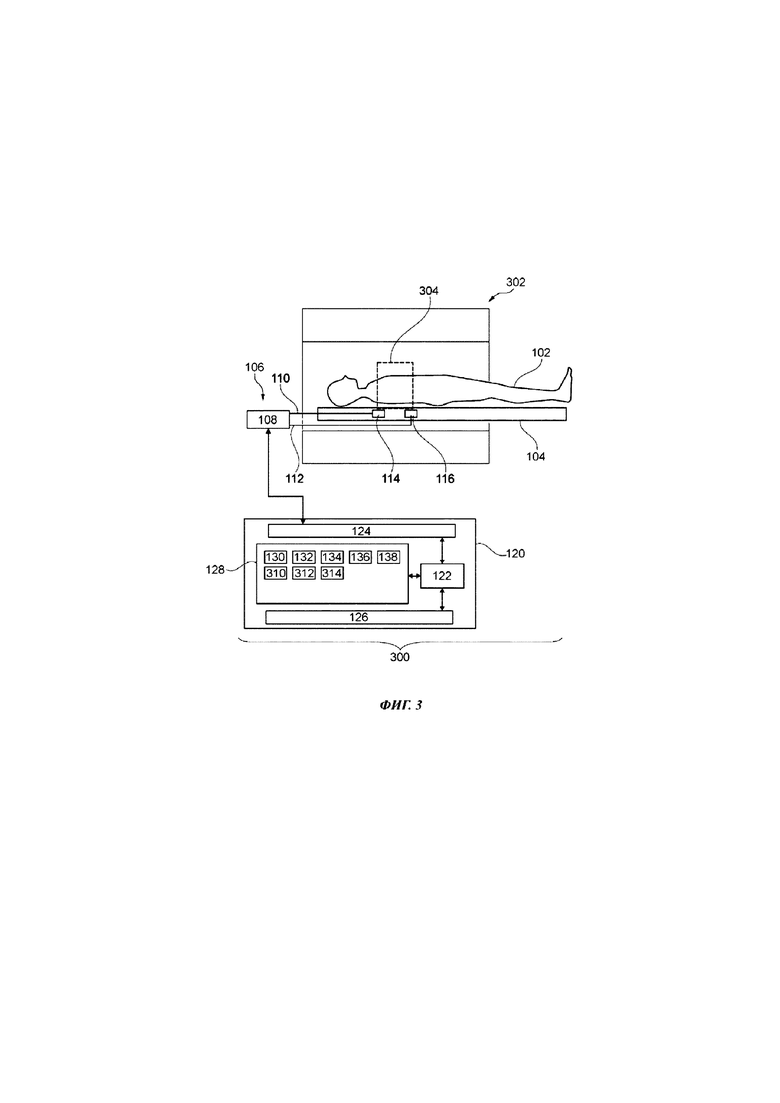
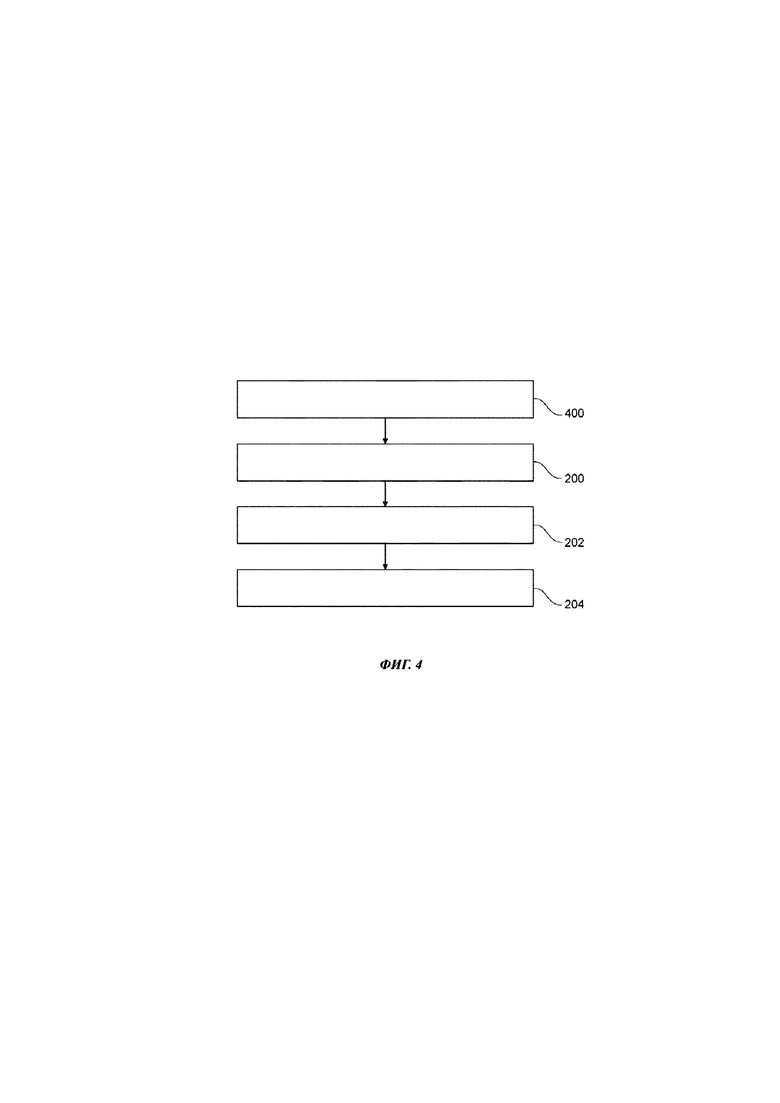
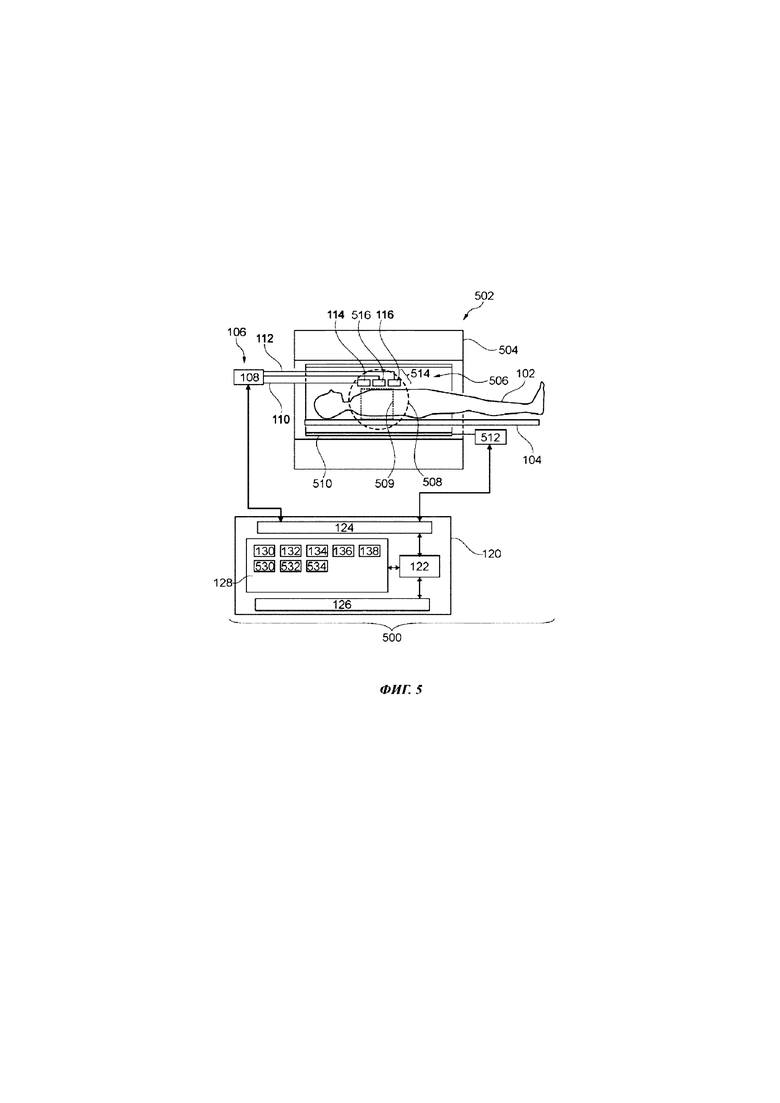
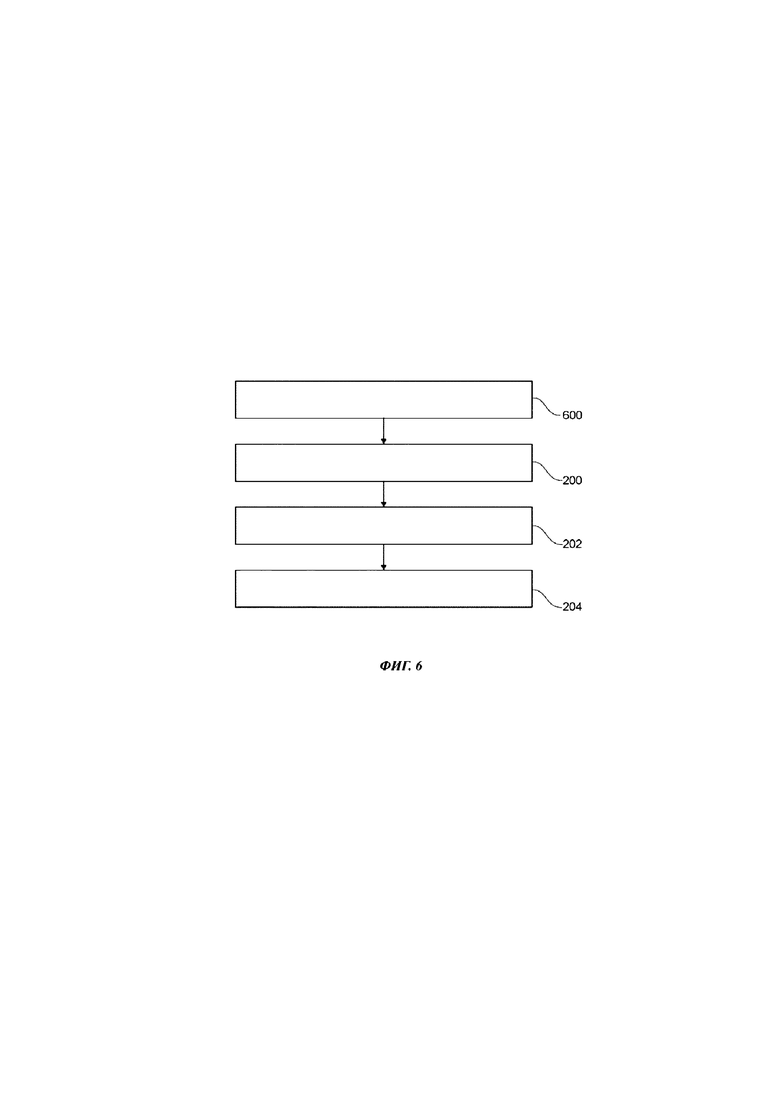
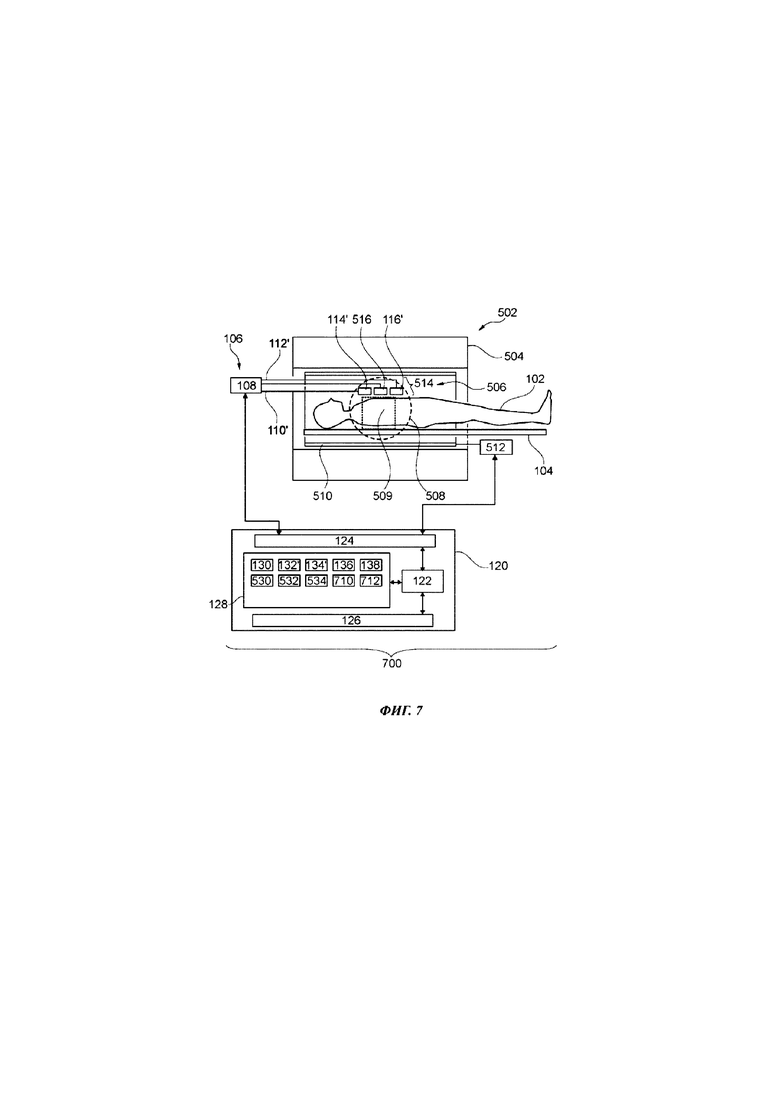
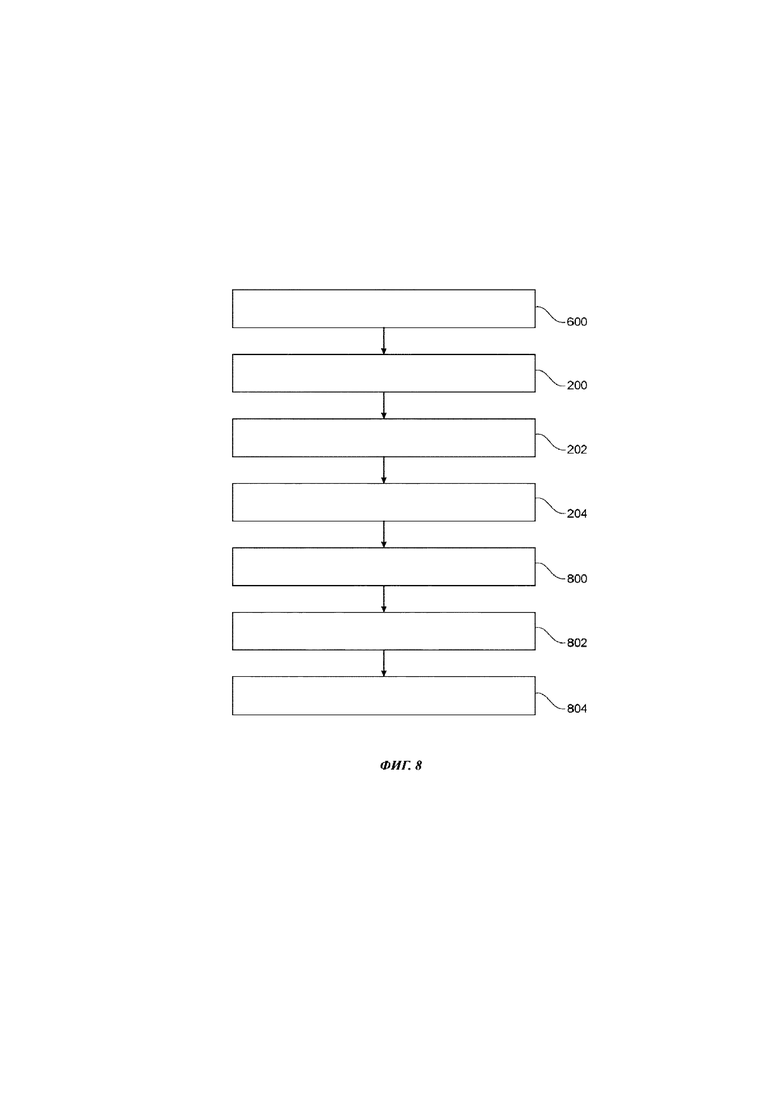
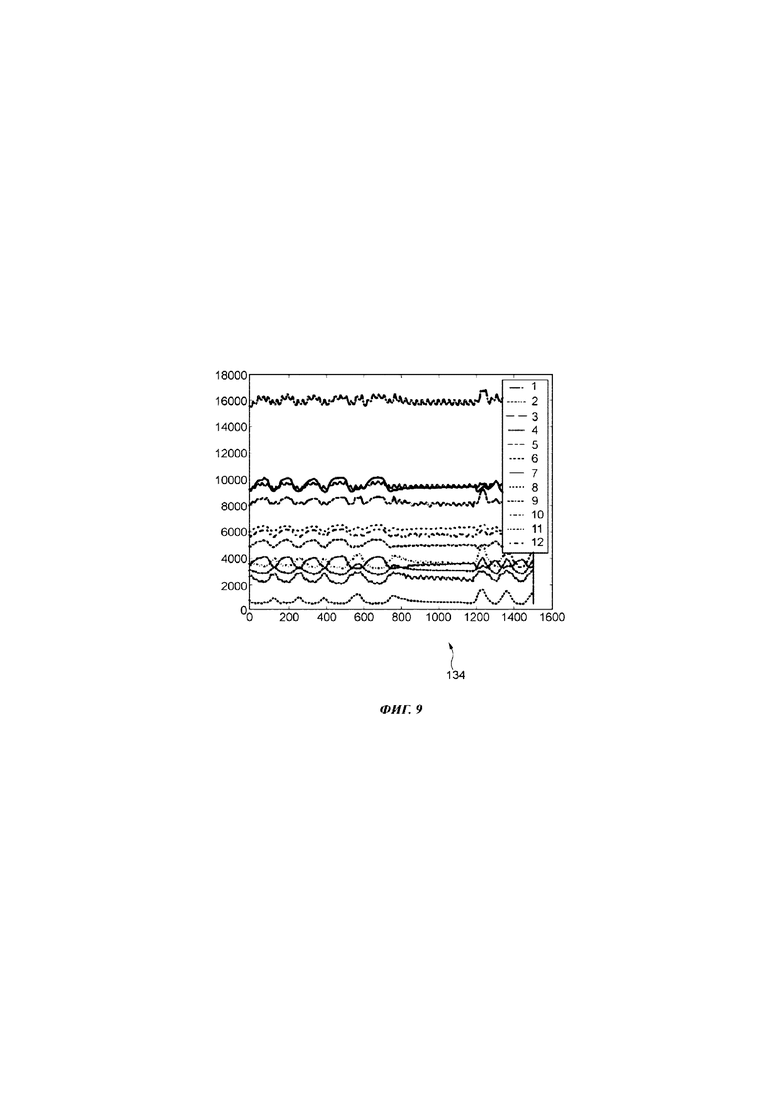
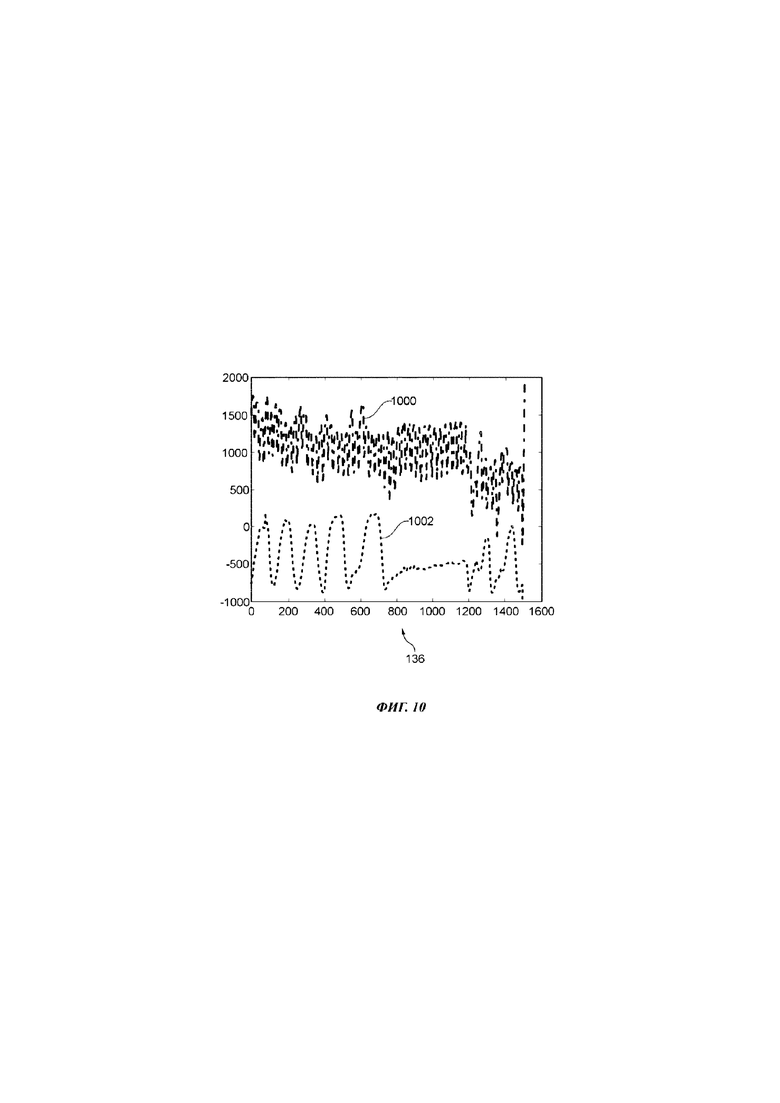
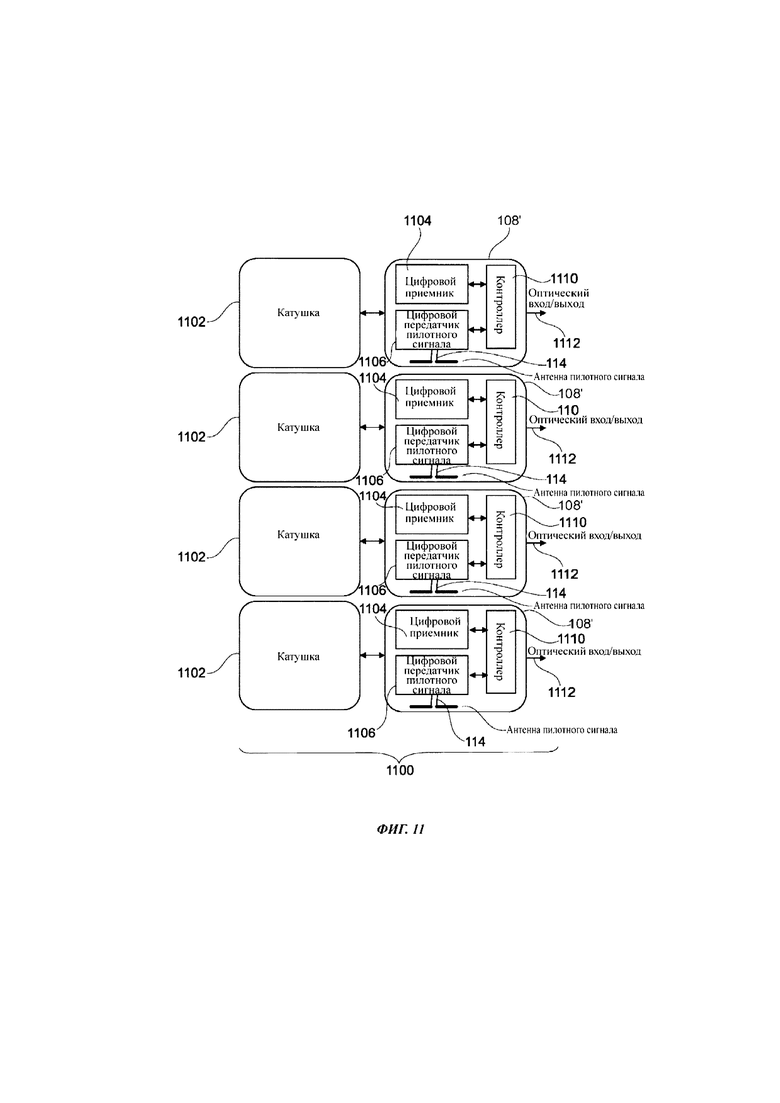
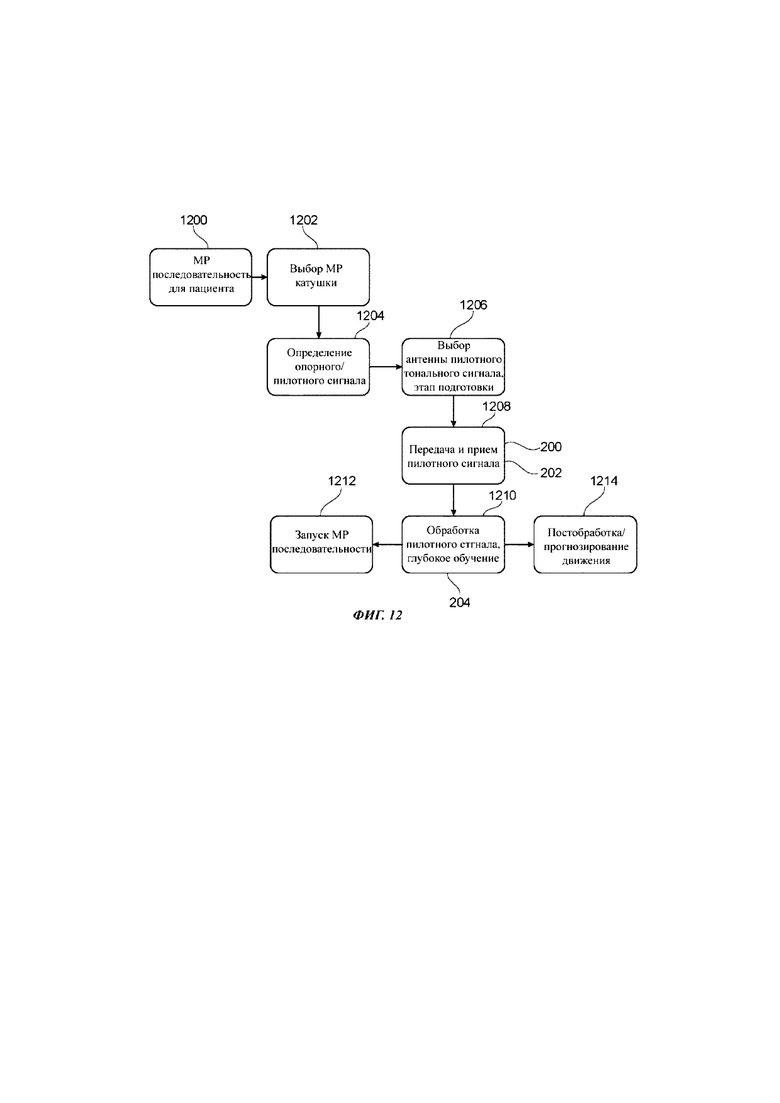
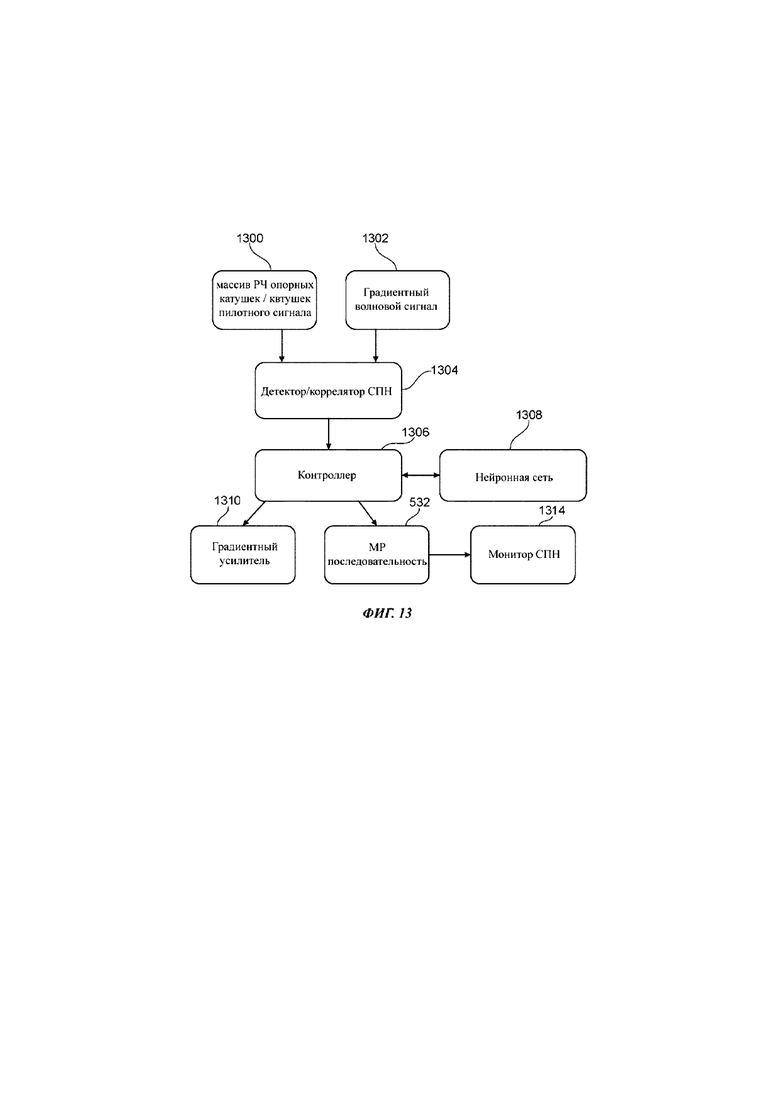
Использование: для детектирования движения пациента. Сущность изобретения заключается в том, что медицинская система для детектирования движения пациента с помощью пилотных тональных сигналов содержит память, хранящую машиноисполняемые инструкции; процессор, выполненный с возможностью управления медицинской системой; и систему пилотного тонального сигнала; причем система пилотного тонального сигнала содержит радиочастотную систему, содержащую множество каналов передачи и множество каналов приема, причем каждый из множества каналов передачи выполнен с возможностью передачи уникальных пилотных тональных сигналов с помощью множества передающих катушек, при этом множество каналов приема выполнены с возможностью приема данных многоканальных пилотных тональных сигналов с помощью множества приемных катушек; причем исполнение машиноисполняемых инструкций побуждает процессор выполнять: передачу многоканальных пилотных тональных сигналов путем управления по меньшей мере частью множества каналов передачи для передачи уникальных пилотных тональных сигналов; сбор данных многоканальных пилотных тональных сигналов, обусловленных импедансным откликом на переданные пилотные тональные сигналы, путем управления по меньшей мере частью множества каналов приема для приема данных многоканальных пилотных тональных сигналов; и определение состояния движения пациента с помощью данных многоканальных пилотных тональных сигналов. Технический результат: обеспечение возможности получения высокоинформативных и точных данных в отношении движения пациента. 3 н. и 12 з.п. ф-лы, 13 ил.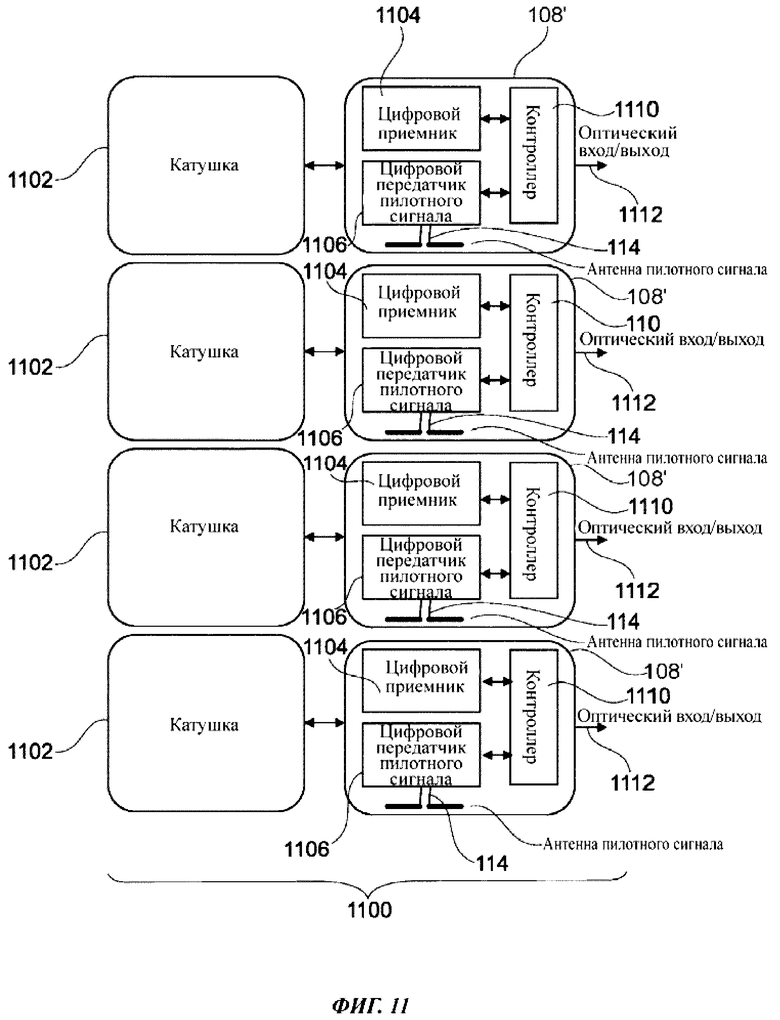
1. Медицинская система (100, 300, 500, 700) для детектирования движения пациента с помощью пилотных тональных сигналов, содержащая:
- память (128), хранящую машиноисполняемые инструкции (130);
- процессор (122), выполненный с возможностью управления медицинской системой; и
- систему (106) пилотного тонального сигнала;
причем система пилотного тонального сигнала содержит:
- радиочастотную систему (108), содержащую множество каналов (110) передачи и множество каналов (112) приема, причем каждый из множества каналов передачи выполнен с возможностью передачи уникальных пилотных тональных сигналов (132) с помощью множества передающих катушек (114), при этом множество каналов приема выполнены с возможностью приема данных (134) многоканальных пилотных тональных сигналов с помощью множества приемных катушек (116);
причем исполнение машиноисполняемых инструкций побуждает процессор выполнять:
- передачу (200) многоканальных пилотных тональных сигналов путем управления по меньшей мере частью множества каналов передачи для передачи уникальных пилотных тональных сигналов;
- сбор (202) данных (134) многоканальных пилотных тональных сигналов, обусловленных импедансным откликом на переданные пилотные тональные сигналы, путем управления по меньшей мере частью множества каналов приема для приема данных многоканальных пилотных тональных сигналов; и
- определение (204) состояния (136) движения пациента с помощью данных многоканальных пилотных тональных сигналов.
2. Медицинская система по п. 1, в которой радиочастотная система выполнена с возможностью кодирования каждого из уникальных пилотных тональных сигналов с помощью любого из следующего: частотное кодирование, фазовое кодирование, комплексная модуляция, кодирование CDMA (множественный доступ с кодовым разделением каналов) и их комбинации.
3. Медицинская система по п. 1 или 2, в которой состояние движения является любым из следующего:
- местоположение движения пациента;
- вектор движения;
- классификация движения пациента;
- состояние дыхания;
- состояние движения сердца;
- вектор поступательного перемещения, характеризующий по меньшей мере часть пациента;
- вращение, характеризующее по меньшей мере часть пациента; и
- комбинация вышеперечисленного.
4. Медицинская система по любому из пп. 1-3, в которой исполнение машиноисполняемых инструкций побуждает процессор определять состояние движения с помощью любого из следующего:
- использование рекуррентной нейронной сети, выполненной с возможностью приема данных многоканальных пилотных тональных сигналов и уникальных пилотных тональных сигналов, а также с возможностью выдачи состояния движения;
- определение расстояния между пациентом и каждой из множества приемных катушек;
- использование цифровой фильтрации;
- использование анализа главных компонент; и
- комбинация вышеперечисленного.
5. Медицинская система по любому из предшествующих пунктов, в которой медицинская система дополнительно содержит систему (502) магнитно-резонансной визуализации, в которой отдельные каналы приема включают в себя (i) одну из множества приемных катушек (116), выполненную в виде катушки (1102) магнитно-резонансной визуализации, и (ii) радиочастотную систему (108), включающую в себя одну из множества передающих катушек (114) пилотного тонального сигнала, причем катушка (1102) магнитно-резонансной визуализации развязана с передающей катушкой пилотного тонального сигнала в отдельном канале приемника.
6. Медицинская система по п. 5, в которой радиочастотная система включает в себя цифровой приемник (1104), связанный с катушкой (1102) магнитно-резонансной визуализации, и цифровой передатчик (1106) пилотного тонального сигнала, связанный с передающей катушкой (114) пилотного тонального сигнала.
7. Медицинская система по п. 5 или 6, в которой система магнитно-резонансной визуализации выполнена с возможностью сбора данных магнитно-резонансной визуализации в пределах частотного диапазона визуализации, причем множество каналов передачи выполнены с возможностью передачи уникальных пилотных тональных сигналов за пределами частотного диапазона визуализации.
8. Медицинская система по п. 7, в которой память дополнительно содержит команды импульсной последовательности, обеспечивающие управление системой магнитно-резонансной визуализации для сбора данных магнитно-резонансной визуализации, причем исполнение машиноисполняемых инструкций дополнительно побуждает процессор управлять системой магнитно-резонансной визуализации с помощью команд импульсной последовательности для сбора данных магнитно-резонансной визуализации, при этом исполнение машиноисполняемых инструкций побуждает процессор во время управления системой магнитно-резонансной визуализации с помощью команд импульсной последовательности выполнять:
- передачу многоканальных пилотных тональных сигналов;
- сбор данных многоканальных пилотных тональных сигналов;
- и определение состояния движения пациента с помощью данных многоканальных пилотных тональных сигналов.
9. Медицинская система по п. 8, в которой исполнение машиноисполняемых инструкций дополнительно побуждает процессор выполнять:
- определение текущей частоты градиентных импульсов с помощью команд импульсной последовательности;
- детектирование движения пациента с периодичностью в пределах заданного диапазона текущей частоты градиентных импульсов с помощью состояния движения;
- выдачу сигнала, оповещающего о стимуляции периферических нервов, если детектировано движение пациента.
10. Медицинская система по п. 9, в которой исполнение машиноисполняемых инструкций, если выдан сигнал оповещения о стимуляции периферических нервов, дополнительно побуждает процессор выполнять любое из следующего:
- выбор альтернативных команд импульсной последовательности;
- изменение команд импульсной последовательности; и
- отмену исполнения команд импульсной последовательности.
11. Медицинская система по любому из пп. 1-4, в которой система пилотного тонального сигнала дополнительно содержит множество передающих катушек и множество приемных катушек; причем медицинская система дополнительно содержит систему (302) томографической визуализации для сбора (300) данных томографической визуализации от пациента в зоне визуализации, причем исполнение машиноисполняемых инструкций дополнительно обусловливает управление процессором системой томографической визуализации для сбора данных томографической визуализации; при этом исполнение машиноисполняемых инструкций процессором побуждает процессор выполнять следующие действия во время управления системой томографической визуализации для сбора данных томографической визуализации:
- передача многоканальных пилотных тональных сигналов;
- сбор данных многоканальных пилотных тональных сигналов;
- и определение состояния движения пациента с помощью данных многоканальных пилотных тональных сигналов.
12. Медицинская система по п. 11, в которой исполнение машиноисполняемых инструкций дополнительно побуждает процессор выполнять:
- восстановление медицинского изображения (314) с помощью данных (312) томографической визуализации; и
- коррекцию восстановления медицинского изображения с помощью состояния движения пациента.
13. Медицинская система по п. 11 или 12, в которой система томографической визуализации является любой из следующих: система позитронно-эмиссионной томографии, система однофотонной эмиссионной томографии и система рентгеновской компьютерной томографии.
14. Компьютерно-читаемый носитель с компьютерным программным продуктом, содержащим машиноисполняемые инструкции (130) для исполнения процессором (122), управляющим медицинской системой (100, 300, 500, 700), причем медицинская система содержит систему (106) пилотного тонального сигнала, при этом система пилотного тонального сигнала содержит радиочастотную систему (108), содержащую множество (114) каналов передачи и множество каналов (112) приема, при этом каждый из множества каналов передачи выполнен с возможностью передачи уникальных пилотных тональных сигналов (132) с помощью множества передающих катушек (114), при этом множество каналов приема выполнены с возможностью приема данных многоканальных пилотных тональных сигналов с помощью множества приемных катушек (116), причем исполнение машиноисполняемых инструкций побуждает процессор выполнять:
- передачу (200) многоканальных пилотных тональных сигналов путем управления по меньшей мере частью множества каналов передачи для передачи уникальных пилотных тональных сигналов;
- сбор (202) данных (134) многоканальных пилотных тональных сигналов, обусловленных импедансным откликом на переданные пилотные тональные сигналы, путем управления по меньшей мере частью множества каналов приема для приема данных многоканальных пилотных тональных сигналов; и
- определение (204) состояния (136) движения пациента с помощью данных многоканальных пилотных тональных сигналов.
15. Способ работы медицинской системы (100, 300, 500, 700) для детектирования движения пациента с помощью пилотных тональных сигналов, в котором медицинская система содержит систему (106) пилотного тонального сигнала, причем система пилотного тонального сигнала содержит радиочастотную систему (108), содержащую множество каналов (114) передачи и множество каналов (112) приема, при этом каждый из множества каналов передачи выполнен с возможностью передачи уникальных пилотных тональных сигналов с помощью множества передающих катушек (114), при этом множество каналов приема выполнены с возможностью приема данных многоканальных пилотных тональных сигналов с помощью множества приемных катушек (116), причем способ содержит следующее:
- передают (200) многоканальные пилотные тональные сигналы путем управления по меньшей мере частью множества каналов передачи для передачи уникальных пилотных тональных сигналов;
- собирают (202) данные (134) многоканальных пилотных тональных сигналов, обусловленные импедансным откликом на переданные пилотные тональные сигналы, путем управления по меньшей мере частью множества каналов приема для приема данных многоканальных пилотных тональных сигналов;
- определяют (204) состояние (136) движения пациента с помощью данных многоканальных пилотных тональных сигналов.
| US 2015002331 A1, 01.01.2015 | |||
| Chen Qin, Jo Schlemper, Jose Caballero, Anthony N | |||
| Price, Joseph V | |||
| Hajnal, Daniel Rueckert, Convolutional Recurrent Neural for Dynamic MR Image Reconstruction, IEEE Transaction on Medical Imaging, Volume: 38, Issue: 1, January 2019, page(s) 280-290, abstract | |||
| US 2015320342 A1, 12.11.2015 | |||
| МАГНИТНО-РЕЗОНАНСНАЯ ВИЗУАЛИЗАЦИЯ С ПОДАВЛЕНИЕМ АРТЕФАКТОВ ПОТОКА | 2012 |
|
RU2605524C2 |
