Изобретение может быть использовано в авиационной технике и в других случаях, требующих выгрузки из транспортного средства (автомобиля, железнодорожного вагона, судна) погрузчика-подъемника паллет и контейнеров.
Большая часть перевозимых авиацией грузов размещается в грузовых контейнерах или на паллетах, имеющих стандартизованные плоские основания с устройствами для швартовки к грузовому полу самолета. В самолет и внутри самолета контейнеры и паллеты перемещаются по роликовым полам. Так как уровень грузового пола самолетов, переделанных из пассажирских, намного выше высоты кузова наземных транспортных средств, аэродромы оснащены специальным подъемным оборудованием - хайлоадерами, роликовые полы которых могут менять свою высоту и имеют средства перемещения паллет и контейнеров. Однако при отсутствии или недоступности хайлоадера в аэропорту прибытия грузовая авиакомпания может посчитать целесообразным иметь свое авиатранспортируемое подъемное устройство, занимающее на борту место одной из паллет и имеющее возможность самостоятельной выгрузки и погрузки на борт. Также изобретение может использоваться и в других случаях, требующих выгрузки из транспортного средства (автомобиля, железнодорожного вагона, судна) погрузчика-подъемника паллет и контейнеров.
Наиболее близким к изобретению по совокупности существенных признаков прототипом может быть принято БОРТОВОЕ ПОГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ АВТОНОМНОЙ ЗАГРУЗКИ КОНТЕЙНЕРОВ И ДРУГИХ ГРУЗОВ ЧЕРЕЗ БОКОВОЙ ГРУЗОВОЙ ЛЮК по патенту на изобретение RU 2166459 С2, дата публикации: 10.05.2001, в котором с целью загрузки паллет и контейнеров на грузовой пол самолета в отсутствие соответствующих аэродромных средств (хайлоадеров) погрузчик встроен в конструкцию грузового самолета. При этом подъемная часть погрузчика прототипа состоит из нескольких ферм, закрепленных за фюзеляж, с тросовой системой и лебедкой для непосредственно подъема (опускания) груза. Участок роликового пола, по которому груз должен закатываться на грузовой пол самолета, во время подъема груза откинут на кронштейнах вниз в вертикальное положение. После подъема груза лебедкой этот участок пола поднимается той же лебедкой до горизонтального и параллельного грузовому полу положения, принимая на себя вес груза и позволяя его перекатывать после отсоединения от тросов подъемной части системы. Недостатками известного устройства являются:
- необходимость доработки конструкции самолета для восприятия всех нагрузок от устройства с последующей сертификацией;
- для самолета с несколькими грузовыми палубами и грузовыми люками устройство должно быть установлено у каждого люка;
- невозможность погрузки длинномерного груза, длина контейнера должна быть меньше высоты люка, через который откидывается участок пола;
- при применении известного устройства для свободы маневра самолетами весь парк грузовых самолетов авиакомпании должен быть доработан под применение такого погрузчика, в то время как заявляемое устройство достаточно иметь одно, загружая его на рейс, где оно может потребоваться.
Техническим результатом изобретения является устранение указанных недостатков.
Технический результат заключается в обеспечении возможности размещения погрузчика в габаритах одной паллеты 3,75 м (125'')×2,44 м (96''), возможности загрузки/выгрузки такого погрузчика на поверхность аэродрома через боковой грузовой люк без использования наземных средств погрузки/выгрузки, в возможности погрузки длинномерного груза рядом погрузчиков, в максимальном использовании объема грузового отсека.
Предложенное к патентованию изобретение характеризуется следующим чертежами.
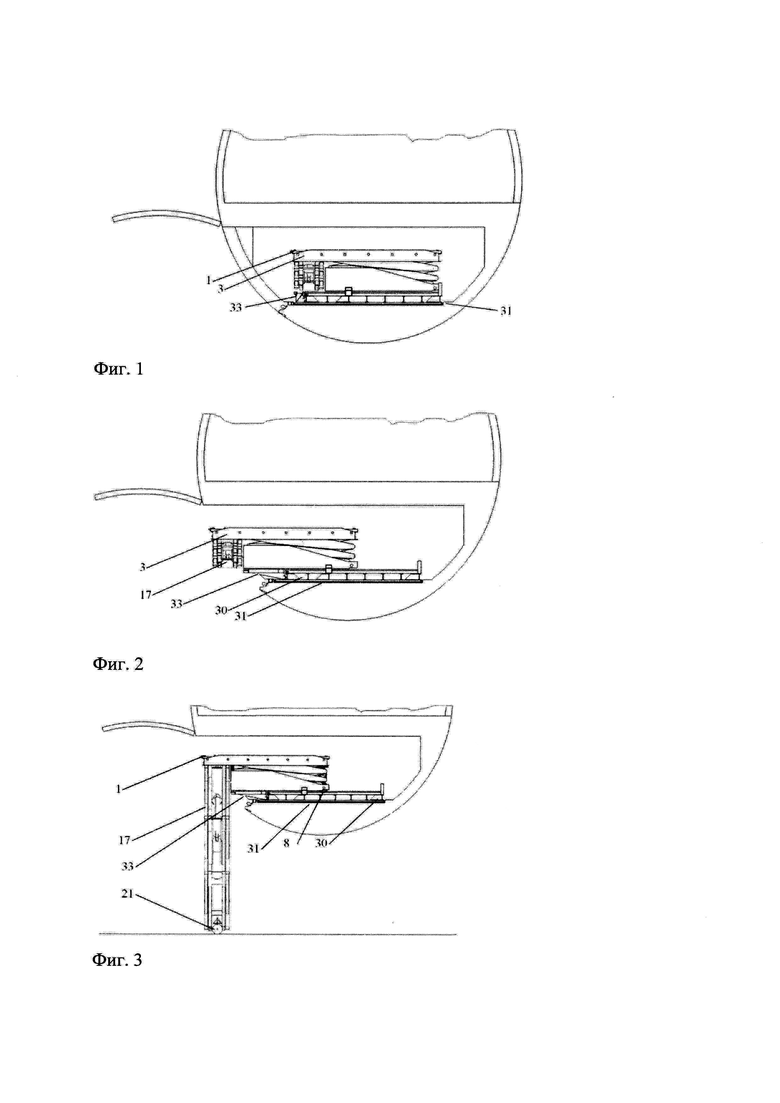
Фиг. 1 - устройство по данной заявке в нижнем грузовом отсеке самолета В-747.
Фиг. 2 - частично выдвинутое положение устройства перед выпуском малой опоры.
Фиг. 3 - частично выдвинутое положение устройства с опиранием на малую опору.
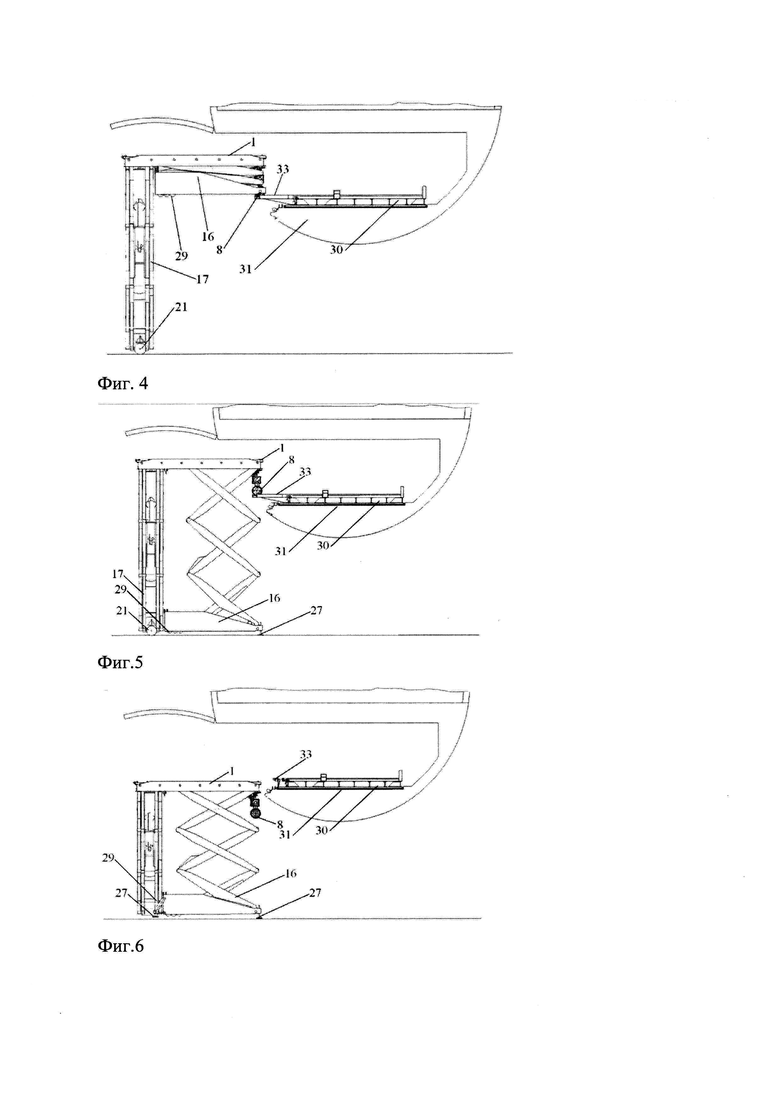
Фиг. 4 - полностью выдвинутое положение устройства перед выпуском большой опоры.
Фиг. 5 - полностью выдвинутое положение устройства, большая опора выпущена.
Фиг. 6 - трапы убраны, опускание в нижнее положение.
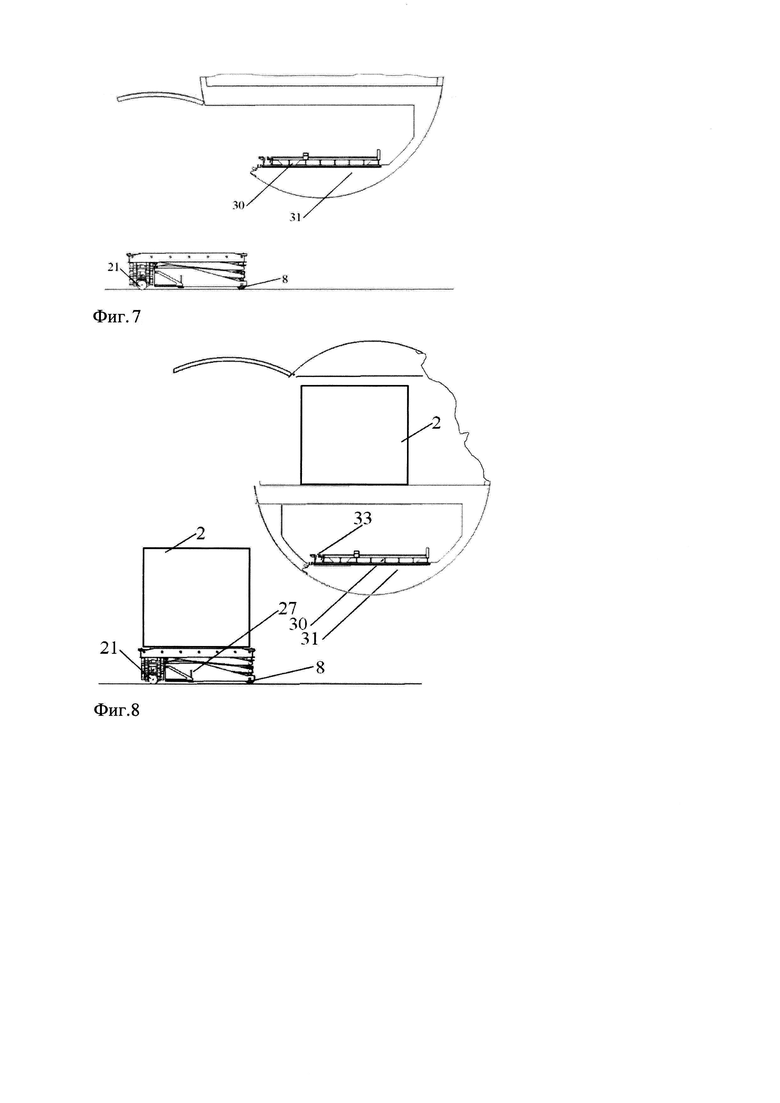
Фиг 7 - положение для перекатки по аэродрому.
Фиг. 8 - погрузчик около грузолюка главной грузовой палубы.
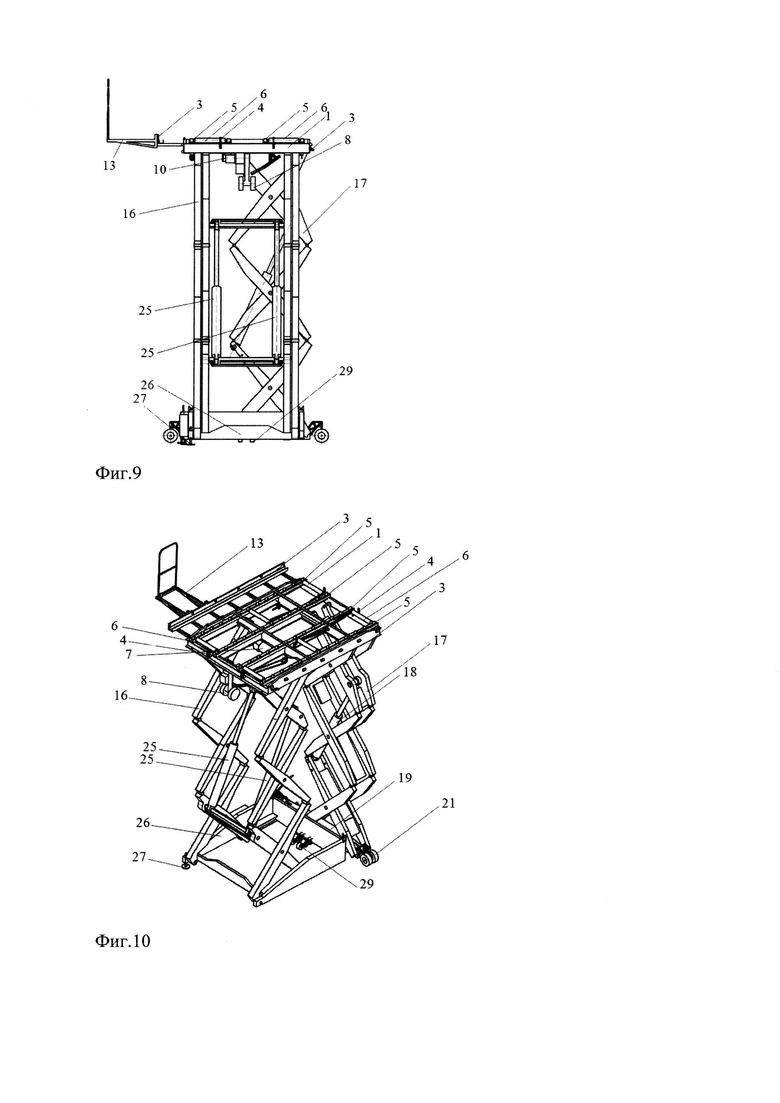
Фиг. 9 - погрузчик в поднятом положении, вид на большую опору.
Фиг. 10 - погрузчик в поднятом положении, аксонометрия.
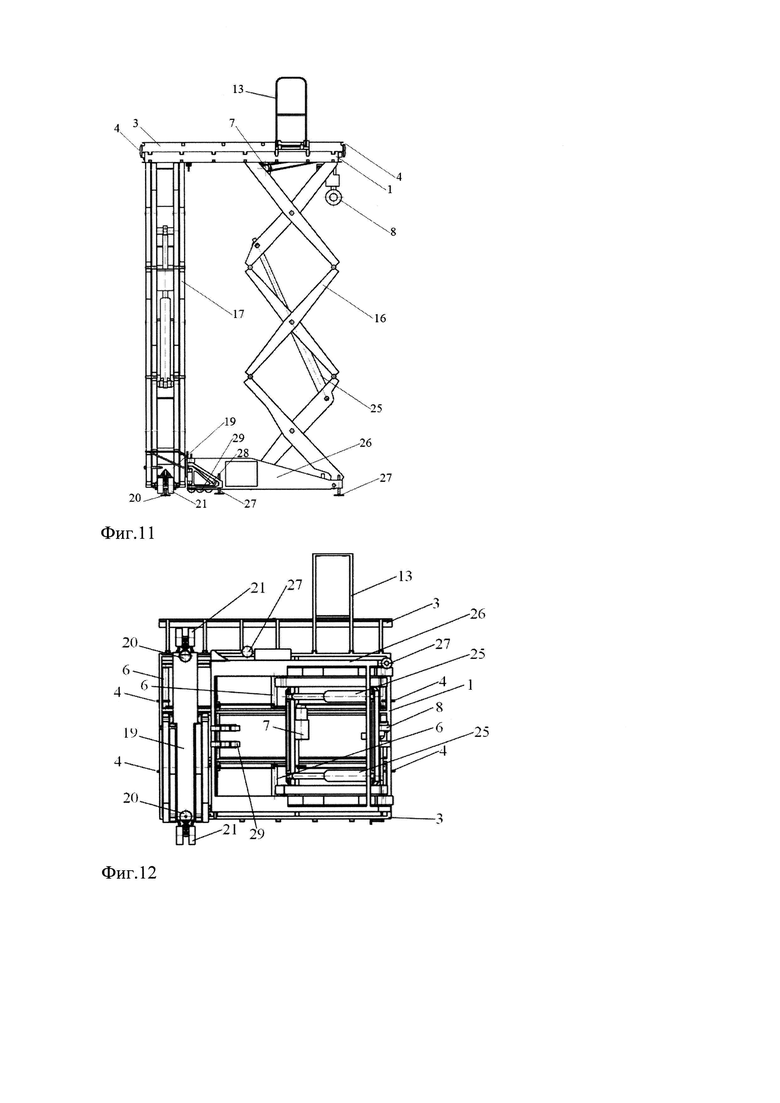
Фиг. 11 - погрузчик в поднятом положении.
Фиг. 12 - погрузчик в поднятом положении, вид снизу.
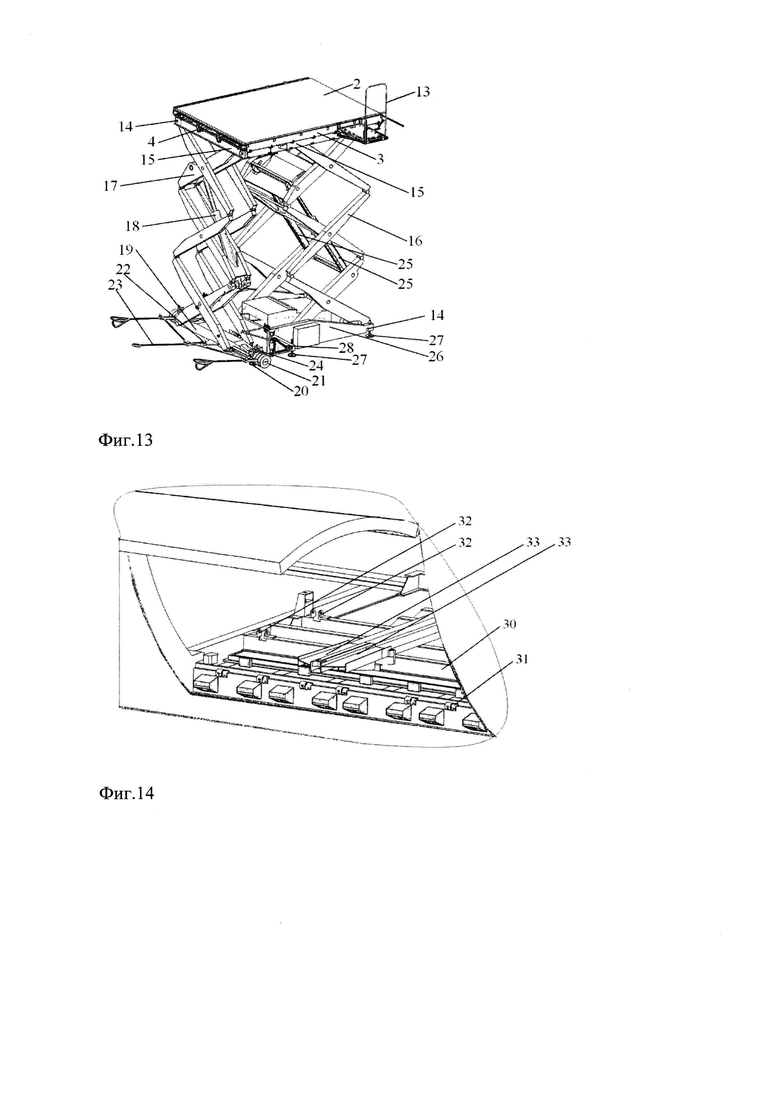
Фиг. 13 - погрузчик с прикрепленным водилом, аксонометрия.
Фиг. 14 - вид на открытый нижний грузовой люк самолета с установленным транспортировочным поддоном погрузчика, трапы в рабочем положении, аксонометрия.
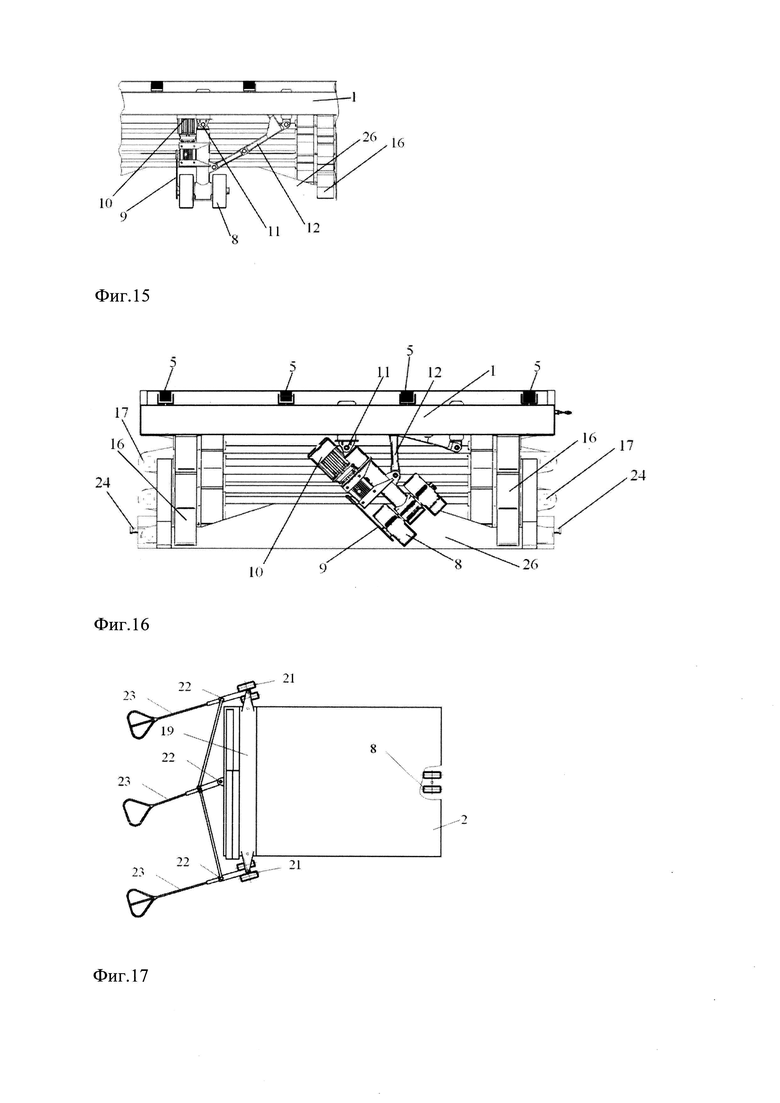
Фиг. 15 - вид на поворотные ведущие колеса роликового пола в положении, выпущенном для передвижения по аэродрому.
Фиг. 16 - вид на поворотные ведущие колеса роликового пола в положении, убранном для подъема грузов.
Фиг. 17 - вид сверху на присоединенное к погрузчику водило.
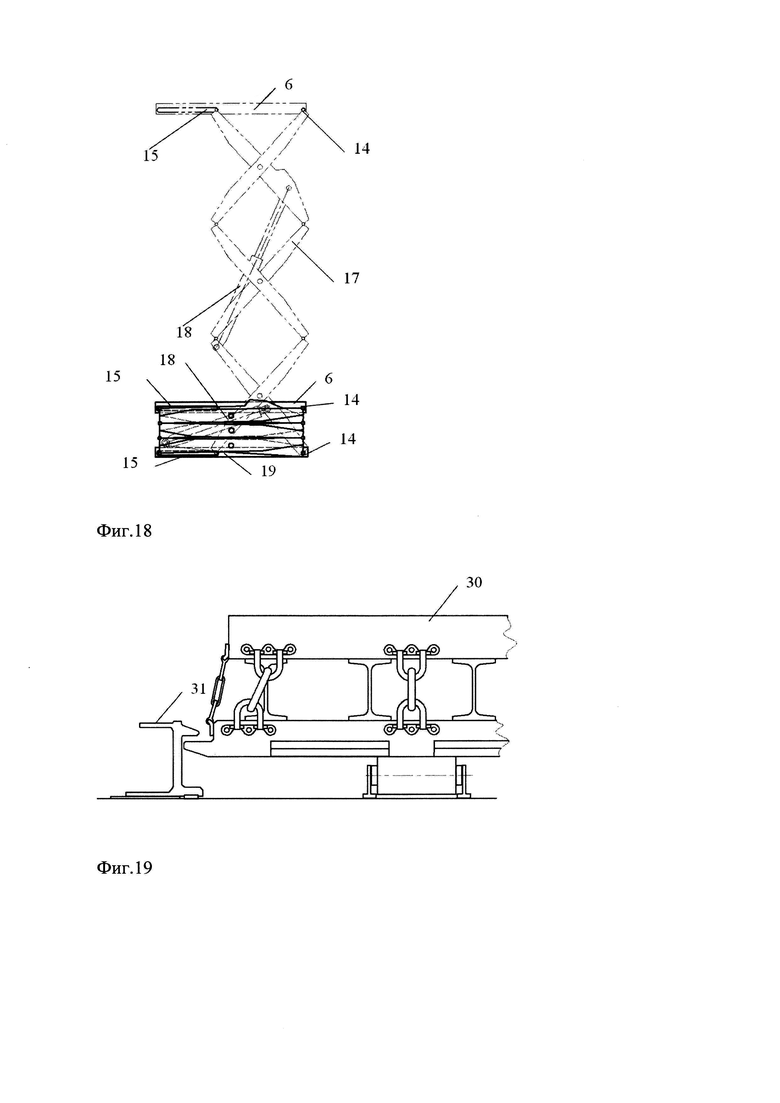
Фиг. 18 - вид на механизм пантографа с гидроцилиндром привода.
Фиг. 19 - вид на расположение транспортировочного поддона погрузчика на грузовом полу самолета.
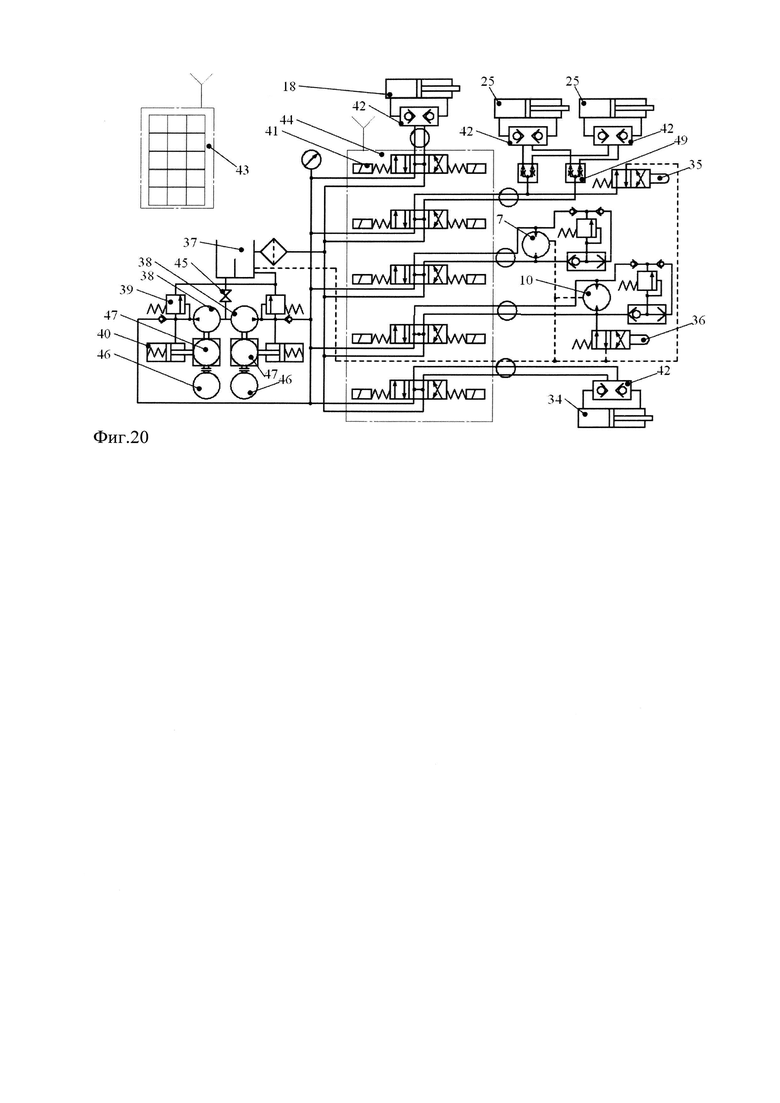
Фиг. 20 - принципиальная схема гидросистемы и системы управления.
Авиатранспортируемый самовыгружающийся погрузчик паллет и контейнеров состоит из: - роликового пола (1) (фиг. 1-16) для перемещения контейнеров и паллет (2) (фиг. 8, 14), с раздвижными боковыми направляющими (3) (фиг. 1-14), поднимаемыми передними и задними упорами (4) (фиг. 9-14), предотвращающими соскальзывание груза, с опорными (5) (фиг. 9, 10) и ведущими (6) (фиг. 9-12) (с приводом от гидродвигателя (7) (фиг. 10-12) роликами для перемещения груза по полу, с управляемой ведущей колесной опорой (8) (фиг. 3-16), через цепную передачу (9) (фиг. 15, 16) приводимой в движение гидродвигателем (10) (фиг. 9-16), прикрепленной к роликовому полу шарнирным узлом (11) (фиг. 15-16) и двухзвенным складывающимся подкосом (12) (фиг. 15-16), приводимым в действие гидроцилиндром (34), с навесной рамой рабочего места оператора (13) (фиг. 9-14), с шарнирными (14) (фиг. 13, 14, 18) и скользящими (15) (фиг. 13, 18) узлами крепления верхних стоек пантографов большой (16) (фиг. 4-16) и малой (17) (фиг. 2-16) опор, - малой опоры (17) с подъемным механизмом, как вариант выполненным в виде тройного сдвоенного пантографа или как другой возможный вариант в виде разборной фермы, приводимого в действие гидроцилиндром (18) (фиг. 10-13), с основанием (19) (фиг. 4-12), имеющим подводимые винтовым домкратом опоры (20) (фиг. 11-13) и ориентируемые колесные пары (21) (фиг. 3-13) с узлами (22) (фиг. 13, 17) для крепления к ним механизма водила (23) (фиг. 13, 17), а также, в варианте исполнения с пантографом, с ответными частями замков (24) (фиг. 16), скрепляющих малую (17) и большую (16) опоры при подъеме грузов; - большой опоры (16) с подъемным механизмом в виде тройного сдвоенного пантографа, разнесенного по правую и левую сторону роликового пола 1 и приводимого в действие двумя гидроцилиндрами (25) (фиг. 9-13), с основанием (26) (фиг. 9-16), имеющим подводимые винтовым домкратом опоры (27) (фиг. 5-13), замок для зацепления с малой опорой (28) (фиг. 11), неориентируемые колесные пары (29) (фиг. 4-12); - транспортировочного поддона (30) (фиг. 2-14, 19) со стандартными узлами крепления к грузовому полу самолета (31) (фиг. 1-14, 19), узлами крепления погрузчика к поддону (32) (фиг. 14), поворотными трапами (33) (фиг. 1-14). Гидравлическая система (фиг. 20) предназначена для привода механизмов погрузчика, обеспечивающих подъем и опускание большой и малой опор, вращение роликов подачи груза, ведущих колес опоры, уборку ведущих колес. Для безопасности работы в гидросистеме предусмотрены ограничитель подъема большой опоры (35), блокировка вращения колес (36).
Гидросистема состоит из маслобака (37), двух шестеренных насосов (38), предохранительных клапанов (39), цилиндров-регуляторов частоты вращения двигателей внутреннего сгорания (40), золотника блокировки гидросистемы привода колес (39), шести распределителей управления (41), гидрозамков (42), пульта дистанционного управления (43), золотника ограничителя подъема большой опоры (35), синхронизаторов цилиндров большой опоры (49), гидродвигателя колес (10), гидрошарниров, гидроцилиндра уборки ведущих колес (34), нижнего блока управления (44), игольчатого вентиля (45), гидродвигателя роликов подачи груза (7).
Работа погрузчика происходит следующим образом. При перелете на аэродром работы погрузчик в походном положении закреплен на транспортировочном поддоне (30), имеющем точки крепления стандартной паллеты в нижнем грузовом отсеке самолета (31), к примеру, В-747 (фиг. 1). После открытия люка грузового отсека электросистема погрузчика подсоединяется при помощи штепсельного разъема аэродромного питания к бортовой сети самолета или к аэродромной сети. Пультом дистанционного управления включается стартер-генератор (46) и происходит запуск двигателя внутреннего сгорания привода гидронасоса (47), проходит функциональная проверка работоспособности погрузчика. Открываются узлы (32) крепления погрузчика к поддону (31). На поддоне (31) поворачиваются из походного в рабочее положение трапы (33), обеспечивающие проезд погрузчика над порогом люка грузового отсека. Включается гидродвигатель (10) привода колес (8) роликового пола (1), и погрузчик выезжает из отсека на неориентируемых колесах большой опоры (29) и колесах роликового пола (8) по направляющим транспортировочного поддона в положение, обеспечивающее выпуск малой опоры (17) до поверхности аэродрома (фиг. 2). Опускается (в случае разборной фермы - монтируется) малая опора (17). При опускании колесные пары (21) малой опоры (17) поворачиваются в положение, параллельное колесам 8 роликового пола (1). Малая опора (17) принимает на себя часть веса погрузчика, разгружая неориентируемые колеса большой опоры (29) (фиг. 3). Включается гидродвигатель (10) привода колес (8) роликового пола (1), и погрузчик выезжает из отсека на колесах (21) малой опоры (17) и ведущей колесной опоры (8) роликового пола (1) в положение, обеспечивающее выпуск большой опоры (16) до поверхности аэродрома (фиг. 4). При этом колеса (8) ведущей колесной опоры роликового пола (1) катятся по трапам (33) над порогом грузового люка самолета. Опускается большая опора (16), принимая на себя часть веса погрузчика и приподнимая ведущие колесные опоры (8) роликового пола (1) над трапами (33) (фиг. 5). Трапы (33) убираются в походное положение. Система управления обеспечивает синхронное уменьшение высоты обеих опор и роликового пола в нижнее положение, в котором часть веса погрузчика приходится на ведущие колесные опоры (8) роликового пола (1) (фиг. 6). Включается гидродвигатель (10) привода колес (8) роликового пола (1), и погрузчик отъезжает в положение, обеспечивающее загрузку верхнего грузового отсека (фиг. 8). При необходимости погрузчик буксируется водилом (23) (фиг. 13) и может им управляться при помощи поворота ориентируемых колесных пар (21), самостоятельно передвигаясь по аэродрому в пределах длины кабеля электропитания. Перед началом погрузочных работ опоры соединяются замком (28), винтовыми домкратами (27) площадка выставляется в горизонтальное положение, ведущие управляемые колеса (8) роликового пола (1) поворачиваются в убранное положение гидроцилиндром (34) (фиг. 16), из роликового пола (1) выдвигаются боковые направляющие 3 и навешивается рама (13) рабочего места оператора погрузки (фиг. 8). Система управления обеспечивает синхронность перемещения опор и стабилизацию горизонтального положения роликового пола, а также запоминание верхнего и нижнего рабочих положений для их повторения со следующей единицей груза. Ведущие ролики роликового пола (6), с приводом от гидродвигателя (7), обеспечивают перемещение грузов (2) с наземного транспортного средства на роликовый пол (1) и с роликового пола на грузовой пол самолета (31). Передние и задние убираемые упоры (4) роликового пола обеспечивают движение груза в нужном направлении. При падении давления в гидросистеме гидрожидкость в цилиндрах запирается гидрозамками (42), предотвращая падение груза. Самопогрузка в нижний грузовой отсек проходит в порядке, обратном описанному.
Анализ совокупности всех существенных признаков предложенного изобретения доказывает, что исключение хотя бы одного из них приводит к невозможности полного обеспечения достигаемого технического результата.
Анализ уровня техники показывает, что неизвестен такой авиатранспортируемый самовыгружающийся погрузчик паллет и контейнеров, которому присущи признаки, идентичные всем существенным признакам данного технического решения, что свидетельствует о его неизвестности и, следовательно, новизне.
Вышеперечисленное доказывает также соответствие заявленного авиатранспортируемого самовыгружающегося погрузчика паллет и контейнеров критерию изобретательского уровня.
При осуществлении изобретения действительно реализуется наличие предложенного объекта, что свидетельствует о промышленной применимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузовой трап транспортного самолета | 2017 |
|
RU2666021C1 |
| РАМПОВЫЙ ГРУЗОВОЙ САМОЛЁТ | 2017 |
|
RU2668012C1 |
| Управляемый колесный погрузочно-разгрузочный комплекс для транспортных самолетов, оборудованных грузовой рампой, и способ погрузки-выгрузки крупногабаритных грузов в/из транспортных самолетов с использованием управляемого колесного погрузочно-разгрузочного комплекса для транспортных самолетов | 2017 |
|
RU2660194C1 |
| Грузовой самолёт интегральной схемы с неотклоняемой хвостовой рампой для погрузки и выгрузки крупногабаритного груза | 2017 |
|
RU2668881C2 |
| БОРТОВОЕ ПОГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ АВТОНОМНОЙ ЗАГРУЗКИ КОНТЕЙНЕРОВ И ДРУГИХ ГРУЗОВ ЧЕРЕЗ БОКОВОЙ ГРУЗОВОЙ ЛЮК | 1999 |
|
RU2166459C2 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ-ВЫГРУЗКИ МОНОГРУЗОВ И КОЛЕСНОЙ ТЕХНИКИ В ЛЕТАТЕЛЬНЫЕ АППАРАТЫ | 2002 |
|
RU2270142C2 |
| СПОСОБ ТРАНСПОРТИРОВКИ, ЗАГРУЗКИ И РАЗГРУЗКИ КРУПНОГАБАРИТНЫХ ГРУЗОВ В ГРУЗОВУЮ КАБИНУ САМОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2248308C2 |
| СПОСОБ БЕСКРАНОВОЙ ПЕРЕГРУЗКИ И ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ И ИЗДЕЛИЙ БОЛЬШОЙ МАССЫ НА ПЛАТФОРМУ САМОЛЕТА И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327606C1 |
| УСТРОЙСТВО ДЛЯ РАЗМЕЩЕНИЯ БАГАЖА | 2006 |
|
RU2432308C2 |
| ТРАНСПОРТНЫЙ ГРУЗОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2776617C1 |
Изобретение относится к устройствам для манипулирования грузами. Авиатранспортируемый самовыгружающийся погрузчик паллет и контейнеров содержит транспортировочный поддон с выдвигаемыми трапами, роликовый пол с роликами для перемещения грузов, упорами для предотвращения соскальзывания грузов, постом оператора, оснащенным пультом управления погрузчиком, опорными катками, малую опору с механизмом изменения высоты в виде пантографа с гидравлическим цилиндром привода, подводимыми опорами и опускаемыми колесами, большую опору с механизмом изменения высоты в виде пантографа с гидравлическими цилиндрами привода, подводимыми опорами и колесами. Предусмотрена система управления и стабилизации подъемника с электрической частью, обеспечивающей электропитание и сигнализацию положения опор, и гидравлической частью, обеспечивающей работу гидроцилиндров опор, систему перемещения и буксировки погрузчика по аэродрому, состоящую из поворотных колес на малой опоре, буксировочного водила, привода от гидродвигателя к колесам роликового пола. Изобретение направлено на обеспечение возможности загрузки/выгрузки погрузчика на поверхность аэродрома через боковой грузовой люк без использования наземных средств. 20 ил.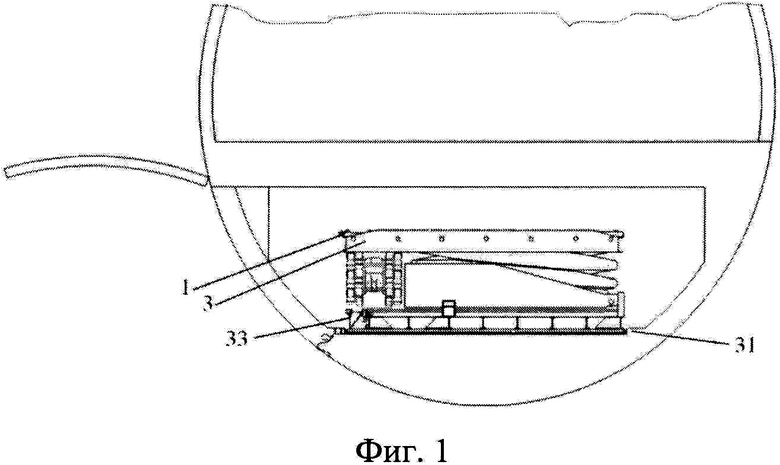
Авиатранспортируемый самовыгружающийся погрузчик паллет и контейнеров, содержащий:
- роликовый пол с роликами для перемещения грузов, выдвижными боковыми упорами для предотвращения соскальзывания грузов, убираемыми передними и задними упорами, постом оператора, оснащенным пультом управления погрузчиком, поворотными ведущими колесами с приводом;
- малую опору в виде разборной фермы или как вариант с механизмом изменения высоты в виде пантографа с гидравлическим цилиндром привода, подводимыми опорами и ориентируемыми колесами;
- большую опору с механизмом изменения высоты в виде пантографа с гидравлическими цилиндрами привода, подводимыми опорами и колесами;
- транспортировочный поддон с выдвигаемыми трапами;
- систему управления и стабилизации подъемника с электрической частью, обеспечивающей электропитание электромоторов гидронасоса, роликового пола и сигнализацию положения опор, и гидравлической частью, обеспечивающей работу гидроцилиндров опор, цилиндра уборки поворотной колесной опоры,
- систему перемещения и буксировки погрузчика по аэродрому, состоящую из ориентируемых колес на малой опоре, буксировочного водила, гидромотора и редуктора привода поворотных колес роликового пола.
| БОРТОВОЕ ПОГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ АВТОНОМНОЙ ЗАГРУЗКИ КОНТЕЙНЕРОВ И ДРУГИХ ГРУЗОВ ЧЕРЕЗ БОКОВОЙ ГРУЗОВОЙ ЛЮК | 1999 |
|
RU2166459C2 |
| US 4586684 A1, 06.05.1986 | |||
| JP 51146020 A, 15.12.1976 | |||
| WO 2010020049 A1, 25.02.2010. | |||

