Группа изобретений относится к подъемно-транспортному оборудованию, в частности к устройствам и способам для погрузки-выгрузки крупногабаритных грузов и грузов большой массы из самолетов, и может быть использована в авиатранспорной отрасли, судостроении и других областях техники для погрузки-выгрузки моногрузов в транспортные средства и их перемещения на грузовые площадки, расположенные выше (ниже) первоначального положения груза.
В патенте-аналоге способ транспортировки, загрузки и разгрузки крупногабаритных грузов в грузовую кабину самолета и система для его осуществления описана система для транспортировки, загрузки и выгрузки крупногабаритных контейнеров в грузовую кабину самолета, содержащая транспортно-перегрузочный агрегат и систему роликовых балок, установленных на грузовом полу и трапах самолета. Транспортно-перегрузочный агрегат включает тягач и полуприцеп с домкратами, платформа которого оснащена роликовыми дорожками на всю длину платформы и отбойными устройствами. Домкраты позволяют поднимать полуприцеп и выставлять его в одну плоскость с грузовой кабиной самолета. При этом роликовые балки пола и трапов самолета совместно с роликовыми дорожками полуприцепа образуют общую роликовую дорожку, по которой груз загружается (закатывается при помощи лебедки) в грузовую кабину самолета. На платформе полуприцепа и полу грузовой кабины установлены отбойные устройства, предотвращающие поперечные смещения груза (см. ссылку из сети Интернет http://www.findpatent.ru/patent/224/2248308.html).
В другом патенте-аналоге способ бескрановой выгрузки, транспортировки и перегрузки крупногабаритных изделий и изделий большой массы с самолета и средство для его осуществления описано средство бескрановой выгрузки с самолета, транспортировки и перегрузки крупногабаритных изделий и изделий большой массы, содержащее основание, грузовую платформу, привод, выполненный в виде двух лебедок с полиспастной системой, трейлер, содержащий силовой механизм для подъема и изменения высоты платформы и выдвижные опоры для ее фиксации, регулируемые по высоте винтовые подставки, нерегулируемые по высоте подставки, ложемент для фиксации шпангоута самолета. Платформа трейлера и элементы переднего грузолюка самолета выполнены с возможностью установки в одну плоскость с полом грузовой кабины самолета и под углом наклона от 0 до 3°30' к горизонту (см. ссылку из сети Интернет http://www.findpatent.ru/patent/218/2184052.html).
Недостатками аналогов являются:
- необходимость усиления конструкции трейлера для восприятия ею значительных нерасчетных нагрузок в процессе поднятия трейлера с грузом на домкратах или других силовых механизмах во время погрузки в самолет;
- необходимость установки роликовых дорожек на всю длину платформы трейлера перед установкой на него груза.
Наиболее близким по технической сущности и достигаемому результату к предложенному решению, взятым за прототип, является устройство для транспортировки и манипулирования грузовой платформой (см. ссылку из сети Интернет http://www.google.com.ar/patents/US20070085288). Данное устройство включает раму, содержащую опорную балку, являющуюся опорой для грузовой платформы, запирающий механизм крепления грузовой платформы к опорной балке и некоторое количество колесных сборок, позволяющих передвигать устройство по поверхности земли.
Предлагаемая в прототипе технология погрузки груза в самолет с использованием данного устройства состоит в следующем:
1. Груз доставляется в зону погрузки наземным транспортным средством (грузовым автомобилем), оборудованным системой самопогрузки-выгрузки типа «мультилифт» (LHS), при этом груз установлен на специальной грузовой платформе.
2. При помощи системы самопогрузки грузового автомобиля платформа с грузом снимается с автомобиля и устанавливается на опорные балки устройства транспортировки и фиксируется на нем при помощи механизма крепления.
3. Средство транспортировки с установленной на нем рамой с грузом доставляется к грузовой рампе самолета.
4. При помощи встроенных в колесные сборки механизмов подъема-опускания платформа с грузом одним своим концом опускается на поверхность грузовой рампы самолета, расфиксируется от крепления к устройству транспортировки и затягивается в грузовую кабину самолета при помощи внешних сил (например, при помощи погрузочной лебедки самолета). В процессе перемещения рамы с грузом в грузовую кабину самолета колесные сборки демонтируются из-под нее по одной, по мере снятия с них нагрузки от веса груза и переноса веса груза на рампу и пол грузовой кабины самолета.
Недостатками изобретения - устройства, принятого за прототип и технологии погрузки с его использованием - являются:
- необходимость использования средства наземной транспортировки, оборудованного системой самопогрузки-выгрузки типа «мультилифт»;
- наличие больших углов наклона груза в процессе перегрузки их с грузовой платформы на описанное устройство;
- необходимость предварительной установки груза на специальную грузовую платформу и невозможность загрузки груза в самолет без использования данной платформы;
- сложность и высокая трудоемкость точной установки платформы с грузом в механизм крепления к опорной балке устройства для транспортировки и манипулирования грузом, происходящей одновременно со снятием платформы с грузом со средства наземной транспортировки;
- невозможность закатки устройства с грузом в самолет в процессе погрузки из-за значительных удельных давлений колес устройства на подстилающую поверхность, что может привести к поломке конструкции рампы и/или пола грузовой кабины самолета, имеющих ограниченную прочность.
Техническим результатом заявленной группы изобретений является обеспечение возможности осуществления снятия грузов больших габаритов и массы со средства наземной транспортировки и загрузки их в грузовую кабину самолета, а также выгрузки их из грузовой кабины самолета и постановки на средство наземной транспортировки без использования дополнительных грузоподъемных устройств, таких как: системы самопогрузки-выгрузки наземных транспортных средств типа «мультилифт», подъемные краны или прочие грузоподъемные устройства, отсутствие больших углов наклона груза в процессе погрузки-выгрузки, отсутствие необходимости предварительной установки груза на специальную грузовую платформу, сокращение числа операций при погрузке и выгрузке груза из самолета, сокращение трудоемкости и времени погрузочно-разгрузочных работ.
Достигаемый технический результат заявленной группы изобретений реализуется за счет создания управляемого колесного погрузочно-разгрузочного комплекса для транспортных самолетов, оборудованных грузовой рампой, содержащего комплект из не менее четырех управляемых по высоте и направлению движения колесных опор, оборудованных управляемыми и неуправляемыми колесными модулями, механизмом поворота не менее одного колесного модуля, качалками, подъемными рычагами, силовым приводом подъема-опускания рычагов и узлом крепления колесной опоры к опорной раме, не менее двух опорных рам, системы энергопитания и системы управления. При этом опорные рамы представляют собой набор металлических балок стандартного сечения и могут быть смонтированы/демонтированы под/из-под груза при помощи только мускульной силы нескольких человек.
При этом конструкция узлов крепления колесных опор к опорным рамам обеспечивает возможность соединения колесных опор и опорных рам до начала снятия груза со средства наземной транспортировки.
При этом система дистанционного управления позволяет осуществлять регулировку положения груза в процессе снятия груза со средства наземной транспортировки и закатывания его в самолет, а также в процессе выкатывания комплекса с грузом из самолета и установки его на средство наземной транспортировки.
При этом колесные модули за счет наличия на одной оси трех и более колес, обеспечивают низкие значения удельного давления на подстилающую поверхность путем распределения нагрузки на большую площадь, что позволяет осуществлять прокатку комплекса с грузом по рампе и полу грузовой кабины самолета.
Способ погрузки-выгрузки крупногабаритных грузов в/из транспортных самолетов с использованием управляемого колесного погрузочно-разгрузочного комплекса для транспортных самолетов, включающий операции установки между средством наземной транспортировки и грузом опорных рам, крепления управляемых колесных опор к торцам опорных рам, монтажа систем энергопитания и дистанционного управления, поднятия груза над грузовой платформой средства наземной транспортировки, закатки груза на управляемом колесном погрузочно-разгрузочным комплексе в грузовую кабину самолета с корректировкой направления движения груза при помощи системы управления и механизмов поворота колесных модулей и с корректировкой наклона груза в продольной и поперечной плоскостях при помощи системы управления и силовых приводов подъема-опускания подъемных рычагов и опускания груза на грузовой пол при помощи системы управления и силовых приводов подъема-опускания подъемных рычагов. При этом опорные элементы груза - опорные рамы монтируются под грузом непосредственно в месте выполнения погрузочных работ, в процессе подготовки к погрузке.
При этом в процессе закатки в самолет груз опирается на колесный погрузочно-разгрузочный комплекс как в процессе движения по поверхности аэродрома, так и в процессе движения по рампе и грузовому полу самолета.
Заявленная группа изобретений поясняется чертежами.
На фиг. 1 показан общий вид управляемого колесного погрузочно-разгрузочного комплекса.
На фиг. 2 показана опорная рама.
На фиг. 3 показана колесная опора.
На фиг. 4 показано управление траекторией в горизонтальной плоскости.
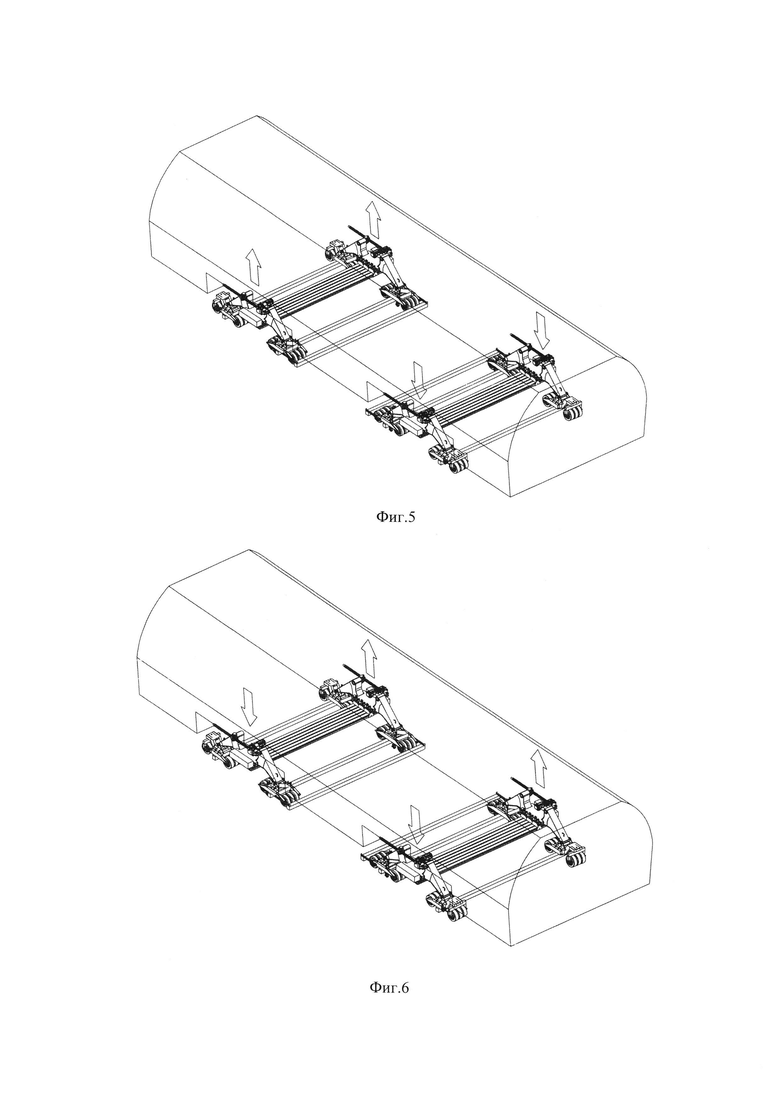
На фиг. 5 показано управление продольным наклоном груза.
На фиг. 6 показано управление поперечным наклоном груза.
Управляемый колесный погрузочно-разгрузочный комплекс (фиг. 1) содержит: комплект дистанционно-управляемых по высоте и направлению движения колесных опор (1), две опорные рамы (2), систему дистанционного управления колесными опорами (3), систему энергопитания (4), комплект распределительных брусьев (5).
Опорная рама (фиг. 2) состоит из набора стальных балок стандартного профиля, например, двутаврового, квадратного, прямоугольного сечения, и.т.д.
Колесная опора 1 (фиг. 3) состоит из узла крепления к балкам (6), электропривода подъема-опускания (7), двух подъемных рычагов (8), неуправляемого колесного модуля (9), управляемого колесного модуля (10), электропривода поворота колес (11), коробки электроагрегатов (12).
Система управления и синхронизации состоит из пульта управления и системы передачи команд на поднятие-опускание исполнительных механизмов колесных опор и поворот управляемых колес. Исполнительными элементами, осуществляющими поднятие-опускание соответствующих колесных опор и поворот управляемых колес являются электроприводы типа «винт-гайка». Электропитание приводов производится от генератора электрической энергии или от внешней электросети.
Способ погрузки (выгрузки) крупногабаритных грузов в (из) транспортного самолета с использованием управляемого колесного погрузочно-разгрузочного комплекса состоит в следующем.
Перед началом погрузки самолет устанавливают на поверхности аэродрома в погрузочное положение (с открытым грузовым люком и разложенной рампой). Груз доставляется в зону погрузки средством наземной транспортировки, например трейлером. Средство наземной транспортировки с грузом располагается перед грузовым люком вдоль оси самолета.
Опорные рамы собираются и размещаются в нишах под грузом, в передней и задней его частях. К левому и правому торцам каждой из опорных рам закрепляется по одной колесной опоре. Осуществляются монтаж и проверка системы энергопитания и системы дистанционного управления. Производится швартовка груза к элементам конструкции погрузочно-разгрузочного комплекса. Затем подается команда на подъем колесных опор и производится подъем груза над поверхностью грузовой платформы средства наземной транспортировки на небольшую высоту (50-100 мм) и проверка правильности работы всех элементов колесного погрузочно-разгрузочного комплекса.
После этого осуществляется закатка груза в самолет, при этом:
горизонтальное движение комплекса с грузом обеспечивается за счет внешних сил (например, погрузочной лебедки самолета);
управление траекторией груза в горизонтальной плоскости осуществляется оператором комплекса путем управления поворотом управляемых колес колесных опор (фиг. 4);
подъем/опускание груза осуществляется оператором комплекса путем подачи команды на синхронный подъем/опускание всех четырех колесных опор (фиг. 6);
управление продольным наклоном груза осуществляется путем подачи команд на раздельный подъем (опускание) передних и задних колесных опор (фиг. 6);
управление поперечным наклоном груза осуществляется путем подачи команд на раздельный подъем (опускание) правых и левых колесных опор.
В процессе погрузки при помощи приводов подъема-опускания и поворота колес погрузочного комплекса осуществляется управление положением груза и предотвращение контакта выступающих частей груза с элементами конструкции самолета.
После закатки и размещения груза в грузовой кабине в соответствии с планом загрузки происходит опускание груза на пол грузовой кабины или специальные распределительные брусья при помощи приводов подъема-опускания колесных опор. Затем осуществляется швартовка груза в грузовой кабине самолета.
Выгрузка груза из самолета происходит в обратном порядке.
Эксплуатация опытного образца доказала влияние совокупности существенных признаков на достигаемый технический результат заявленной группы изобретения, заключающийся в возможности осуществления снятия грузов больших габаритов и массы со средства наземной транспортировки и загрузки их в грузовую кабину самолета, а также выгрузки их из грузовой кабины самолета и постановки на средство наземной транспортировки без использования дополнительных грузоподъемных устройств, таких как системы самопогрузки-выгрузки наземных транспортных средств типа «мультилифт», подъемные краны или прочие грузоподъемные устройства, отсутствие больших углов наклона груза в процессе погрузки-выгрузки, отсутствие необходимости предварительной установки груза на специальную грузовую платформу, сокращение числа операций при погрузке и выгрузке груза из самолета, сокращение трудоемкости и времени погрузочно-разгрузочных работ.
Заявленная группа изобретений является новой, поскольку вся совокупность признаков неизвестна из предшествующего уровня техники, приведенной в соответствующем разделе описания.
Заявленная группа технических решений имеет изобретательский уровень, поскольку оно для специалиста явным образом не следует из уровня техники.
Заявленная группа изобретений является промышленно применимой по отношению к избранным областям техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузовой трап транспортного самолета | 2017 |
|
RU2666021C1 |
| РАМПОВЫЙ ГРУЗОВОЙ САМОЛЁТ | 2017 |
|
RU2668012C1 |
| Грузовой самолёт интегральной схемы с неотклоняемой хвостовой рампой для погрузки и выгрузки крупногабаритного груза | 2017 |
|
RU2668881C2 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ-ВЫГРУЗКИ МОНОГРУЗОВ И КОЛЕСНОЙ ТЕХНИКИ В ЛЕТАТЕЛЬНЫЕ АППАРАТЫ | 2002 |
|
RU2270142C2 |
| Авиатранспортируемый самовыгружающийся погрузчик паллет и контейнеров | 2017 |
|
RU2660198C1 |
| СПОСОБ ПОГРУЗКИ ГРУЗОВ В САМОЛЕТ И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2554186C2 |
| Наземный транспортный комплекс | 2016 |
|
RU2612070C1 |
| ТРАНСПОРТНЫЙ ГРУЗОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2776617C1 |
| ЭСТАКАДА ДЛЯ ПОГРУЗКИ-ВЫГРУЗКИ МОНОГРУЗОВ И КОЛЕСНОЙ ТЕХНИКИ В ЛЕТАТЕЛЬНЫЕ АППАРАТЫ ТИПА ТЯЖЕЛОГО ТРАНСПОРТНОГО САМОЛЕТА АН-124-100 | 2003 |
|
RU2256589C2 |
| Универсальный автоматизированный погрузочно-разгрузочный модуль Шумовского | 2019 |
|
RU2721809C1 |
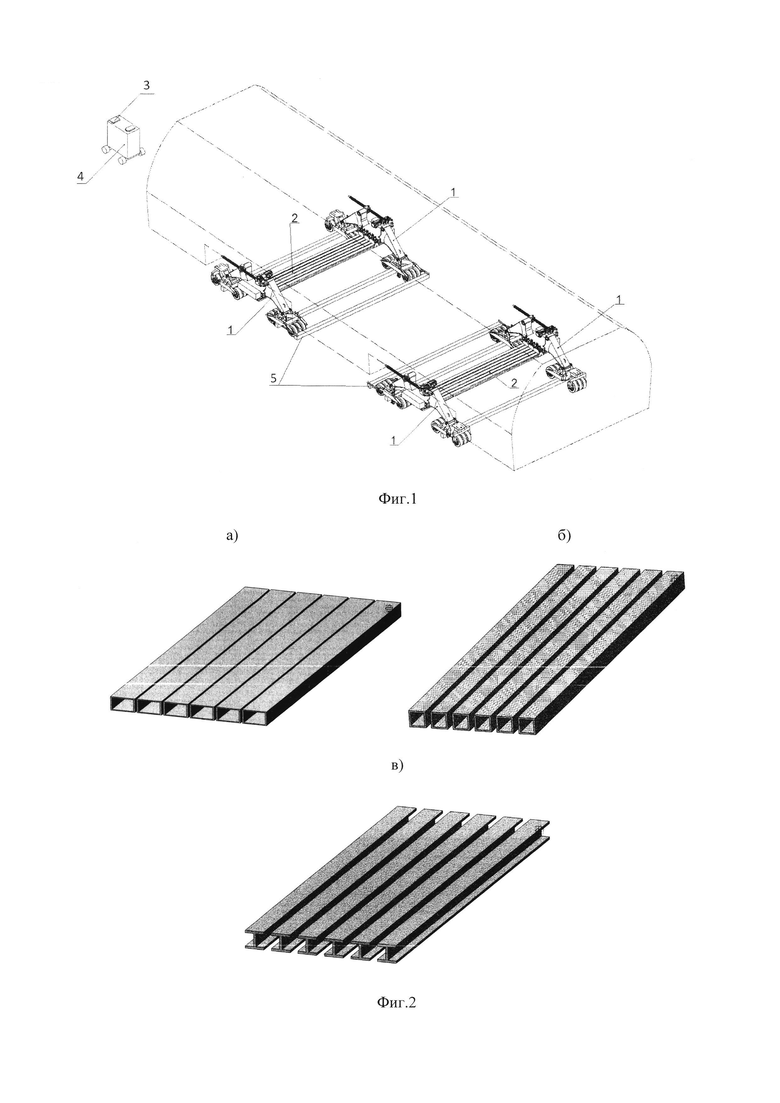

Изобретение относится к подъемно-транспортному оборудованию. Управляемый колесный погрузочно-разгрузочный комплекс для транспортных самолетов, оборудованных грузовой рампой, содержит комплект из не менее четырех управляемых по высоте и направлению движения колесных опор (1), оборудованных управляемыми и неуправляемыми колесными модулями. Комплекс также содержит механизм поворота колесного модуля, качалки, подъемные рычаги, силовой привод подъема-опускания рычагов и узел крепления колесной опоры к опорной раме (2), не менее двух опорных рам (2), систему энергопитания и систему управления. Опорные рамы (2) представляют собой набор металлических балок (5) стандартного сечения с возможностью монтажа или демонтажа под груз или из-под груза при помощи мускульной силы нескольких человек. Изобретение позволяет осуществлять погрузку и выгрузку груза из самолета без использования дополнительных грузоподъемных устройств и сокращает число операций при погрузке и выгрузке груза из самолета, сокращает трудоемкость и время погрузочно-разгрузочных работ. 2 н. и 4 з.п. ф-лы, 10 ил.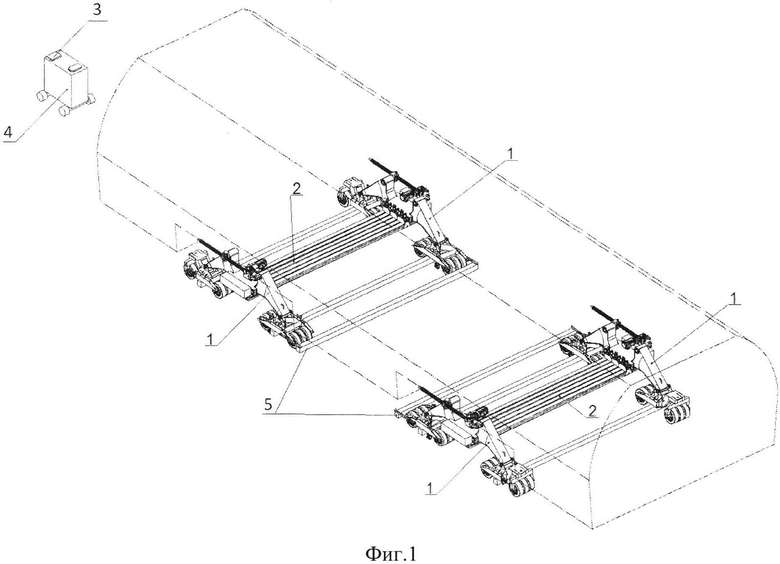
1. Управляемый колесный погрузочно-разгрузочный комплекс для транспортных самолетов, оборудованных грузовой рампой, содержащий комплект из не менее четырех управляемых по высоте и направлению движения колесных опор, оборудованных управляемыми и неуправляемыми колесными модулями, механизмом поворота не менее одного колесного модуля, качалками, подъемными рычагами, силовым приводом подъема-опускания рычагов и узлом крепления колесной опоры к опорной раме, не менее двух опорных рам, системы энергопитания и системы управления, отличающийся тем, что опорные рамы представляют собой набор металлических балок стандартного сечения и могут быть смонтированы/демонтированы под/из-под груза при помощи только мускульной силы нескольких человек.
2. Устройство по п. 1, отличающееся тем, что конструкция узлов крепления колесных опор к опорным рамам обеспечивает возможность соединения колесных опор и опорных рам до начала снятия груза со средства наземной транспортировки.
3. Устройство по п. 1, отличающееся тем, что система дистанционного управления позволяет осуществлять регулировку положения груза в процессе снятия груза со средства наземной транспортировки и закатывания его в самолет, а также в процессе выкатывания комплекса с грузом из самолета и установки его на средство наземной транспортировки.
4. Устройство по п. 1, отличающееся тем, что его колесные модули за счет наличия на одной оси трех и более колес обеспечивают низкие значения удельного давления на подстилающую поверхность путем распределения нагрузки на большую площадь, что позволяет осуществлять прокатку комплекса с грузом по рампе и полу грузовой кабины самолета.
5. Способ погрузки-выгрузки крупногабаритных грузов в/из транспортных самолетов с использованием управляемого колесного погрузочно-разгрузочного комплекса для транспортных самолетов, включающий операции установки между средством наземной транспортировки и грузом опорных рам, крепления управляемых колесных опор к торцам опорных рам, монтажа систем энергопитания и дистанционного управления, поднятия груза над грузовой платформой средства наземной транспортировки, закатки груза на управляемом колесном погрузочно-разгрузочным комплексе в грузовую кабину самолета с корректировкой направления движения груза при помощи системы управления и механизмов поворота колесных модулей и с корректировкой наклона груза в продольной и поперечной плоскостях при помощи системы управления и силовых приводов подъема-опускания подъемных рычагов и опускания груза на грузовой пол при помощи системы управления и силовых приводов подъема-опускания подъемных рычагов, отличающийся тем, что опорные элементы груза - опорные рамы монтируются под грузом непосредственно в месте выполнения погрузочных работ, в процессе подготовки к погрузке.
6. Способ по п. 5, отличающийся тем, что в процессе закатки в самолет груз опирается на колесный погрузочно-разгрузочный комплекс как в процессе движения по поверхности аэродрома, так и в процессе движения по рампе и грузовому полу самолета.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| WO 1997031820 A1, 04.09.1997 | |||
| СПОСОБ БЕСКРАНОВОЙ ПЕРЕГРУЗКИ И ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ И ИЗДЕЛИЙ БОЛЬШОЙ МАССЫ НА ПЛАТФОРМУ САМОЛЕТА И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327606C1 |
| Подъемно-погрузочное устройство летательного аппарата,например вертолета | 1975 |
|
SU586620A1 |

