Изобретение относится к области транспорта, в частности к лифтовым установкам, и может быть использовано для дистанционного контролирования состояния каждого лифта в жилых и в общественных помещениях.
Контроль состояния лифта заключается в отслеживании его работы путем измерения различных параметров.
При дистанционном контроле состояния лифтов сами лифты, как правило, обеспечивают индикацию неисправностей.
Известны способы и реализующие их устройства для дистанционного контроля лифтов (авт. свид. СССР №№1399773, 1838224; патенты РФ №№2101224, 2149966, 2310597, 2317241, 2321533, 2384511; патент Великобритании №1522185; патенты Франции №№2561224, 2785597; патент Японии №7252050; патент ЕР №1076030; патент WO №9936341 и др.).
Известный способ, выбранный в качестве прототипа (патент РФ №2384511), заключается в сборе данных для использования в процессе дистанционного контроля, при котором проводят предварительное обучение. В качестве собираемых данных фиксируют сигналы, соответствующие движению лифта. Далее преобразуют эти сигналы в сигналы числа поездок лифта в заданный период, который разделяют на интервалы счета и соотносят полученные данные с данными часов реального времени, располагая их по интервалам счета в заданном периоде измерений в виде математического ожидания числа поездок лифта отдельно в каждом интервале счета. Порог принятия решения определяют персонально для каждого интервала счета.
Устройство, реализующее известный способ, содержит кабину лифта с приводными элементами и блоком управления лифтом, датчик движения кабины лифта, блок обработки, преобразователь, включенный между датчиком и блоком обработки, по меньшей мере одно средство передачи данных. Причем блок обработки содержит вычислительный элемент с накопителем, узел сравнения, временной счетчик с часами реального времени, счетчик числа поездок в каждом интервале счета.
В указанных технических решениях сигнал рассогласования и данные о поездках лифта передают на пункт дистанционного контроля с помощью симплексной радиосвязи.
Технической задачей изобретения является повышение эффективности дистанционного контроля лифтов путем использования сложных сигналов с комбинированной амплитудной модуляцией и фазовой манипуляцией (АМ-ФМн).
Поставленная задача решается тем, что способ дистанционного контроля лифтов, заключающийся в сборе данных для использования в процессе дистанционного контроля, при котором проводят предварительное обучение путем сбора данных, измеренных в последовательном порядке в заданный период измерений, при этом проводят по меньшей мере один цикл измерений заданного периода, накапливают информацию по каждому циклу измерений, усредняют накопленные данные минимально необходимого для обучения устройства количества циклов измерений в периоде усреднения, представляя их в виде значений математического ожидания, затем, исходя из полученных в процессе обучения данных периода усреднения, определяют порог принятия решения, свидетельствующий об изменении состояния лифта, далее сравнивают данные текущих измерений со значениями математического ожидания в периоде усреднения и при несоответствии данных текущих измерений порогу принятия решения формируют сигнал рассогласования, который выводят на индикатор, по результатам текущих измерений осуществляют корректировку значений математического ожидания в периоде усреднения, в качестве собираемых данных фиксируют сигналы, соответствующие движению лифта, преобразуют эти сигналы в сигналы числа поездок лифта в заданный период, который разделяют на интервалы счета и соотносят полученный данные с данными часов реального времени, располагая их по интервалам счета в заданном периоде измерений в виде математического ожидания числа поездок лифта отдельно в каждом интервале счета, и порог принятия решения определяют персонально для каждого интервала счета, отличается от ближайшего аналога тем, что каждый лифт и пункт дистанционного контроля снабжают модемами, в модеме каждого лифта формируют гармоническое колебание с частотой ωс, модулируют его по амплитуде аналоговым сообщением, манипулируют по фазе дискретным сообщением, формируя сложный сигнал с комбинированной амплитудной модуляцией и фазовой манипуляцией, усиливают его по мощности и излучают в эфир, улавливают на пункте дистанционного контроля, усиливают по напряжению, преобразуют по частоте с использованием частоты ωг гетеродина, выделяют напряжение промежуточной частоты ωпр=ωс-ωг, ограничивают его по амплитуде, формируя сложный сигнал с фазовой манипуляцией, используют его в качестве опорного напряжения для синхронного детектирования сигнала с амплитудной модуляцией, выделяют низкочастотное напряжение, пропорциональное аналоговому сообщению, и регистрируют его, сложный сигнал с фазовой манипуляцией на промежуточной частоте ωпр перемножают с гармоническим колебанием на промежуточной частоте ωпр, выделяют низкочастотное напряжение, пропорциональное дискретному сообщению, и регистрируют его, одновременно указанное низкочастотное напряжение перемножают со сложным сигналом с фазовой манипуляцией на промежуточной частоте ωпр и выделяют гармоническое колебание на промежуточной ωпр.
Поставленная задача решается тем, что устройство для дистанционного контроля лифтов, включающее кабину лифта с приводными элементами и блоком управления лифтом, блок индикаций и последовательно включенные датчик движения кабины, блок преобразователя и блок обработки, содержащий временной счетчик с часами реального времени, вход которого является входом блока обработки, а к выходу последовательно подключены вычислительный элемент и узел сравнения, второй вход которого через счетчик числа поездок в каждом интервале счета соединен с выходом блока преобразователя, а выход является выходом блока обработки, при этом датчик движения кабины лифта выполнен в виде по меньшей мере двух магнитов, установленных с чередующейся магнитной полярностью на колесе ограничителя скорости лифта, и датчика магнитного поля, например датчика Холла, стационарно расположенного в непосредственной близости от магнитов, отличается от ближайшего аналога тем, что снабжено пунктом дистанционного контроля, при этом каждый лифт и пункт дистанционного контроля снабжены модемами, модем каждого лифта содержит последовательно включенные задающий генератор, амплитудный модулятор, второй вход которого соединен с выходом источника аналоговых сообщений, фазовый манипулятор, второй вход которого соединен с выходом сумматора, усилитель мощности и передающую антенну, а модем пункта дистанционного контроля содержит последовательно включенные приемную антенну, усилитель высокой частоты, смеситель, второй вход которого соединен с выходом гетеродина, усилитель промежуточной частоты, амплитудный ограничитель, синхронный детектор, второй вход которого соединен с выходом усилителя промежуточной частоты, и блок регистрации, последовательно подключенные к выходу амплитудного ограничителя первый перемножитель, второй вход которого соединен с выходом фильтра нижних частот, узкополосный фильтр, второй перемножитель, второй вход которого соединен с выходом амплитудного ограничителя, и фильтр нижних частот, выход которого соединен со вторым входом блока регистрации.
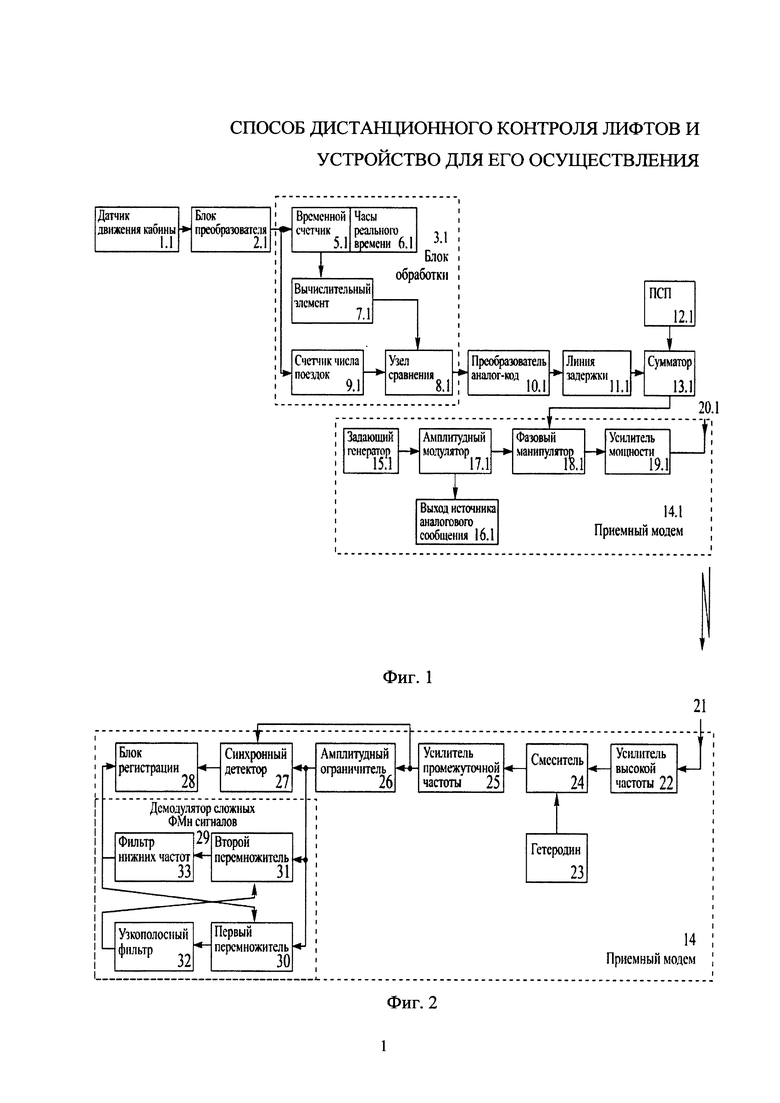
Структурная схема устройства, реализующего предлагаемый способ, и модема, размещаемого на первом лифте, представлена на фиг. 1. Структурная схема модема, размещаемого на пункте дистанционного контроля, изображена на фиг. 2.
Устройство, реализующее предлагаемый способ, содержит последовательно включенные датчик 1.1 движения кабины, блок 2.1 преобразователя и блок 3.1 обработки, который представляет собой последовательно подключенные к выходу блока 2.1 преобразователя временной счетчик 5.1 с часами реального времени 6.1, вычислительный элемент 7.1 и узел 8.1 сравнения, второй вход которого через счетчик 9.1 числа поездок в каждом интервале счета соединен с выходом блока 2.1 преобразователя. К выходу узла 8.1 сравнения последовательно подключены преобразователь 10.1 аналог-код, линия 11.1 задержки и сумматор 13.1, второй вход которого соединен с выходом генератора 12.1 псевдослучайной последовательности (ПСП). Модем 14.1, установленный на каждом лифте, содержит задающий генератор 15.1, амплитудный модулятор 17.1, второй вход которого соединен с выходом источника 16.1 аналоговых сообщений, фазовый манипулятор 18.1, второй вход которого соединен с выходом сумматора 13.1, усилитель 19.1 мощности и передающую антенну 20.1. Модем 14, установленный на пункте дистанционного контроля, содержит последовательно включенные приемную антенну 21, усилитель 22 высокой частоты, смеситель 24, второй вход которого соединен с выходом гетеродина 23, усилитель 25 промежуточной частоты, амплитудный ограничитель 26, синхронный детектор 27, второй вход которого соединен с выходом усилителя 25 промежуточной частоты, и блок 28 регистрации. К выходу амплитудного ограничителя 26 последовательно подключены первый перемножитель 30, второй вход которого соединен с выходом фильтра 33 нижних частот, узкополосный фильтр 32, второй перемножитель 31, второй вход которого соединен с выходом амплитудного ограничителя 26, и фильтр 33 нижних частот, выход которого соединен со вторым входом блока 28 регистрации.
Перемножители 30 и 31, узкополосный фильтр 32 и фильтр 33 нижних частот образуют универсальный демодулятор 29 сложных ФМн сигналов.
Заявляемый способ осуществляется с помощью устройства для дистанционного контроля лифтов следующим образом.
Способ предусматривает в начале эксплуатации лифта осуществление процедуры «обучения», которая включает накопление реальной статистики о числе поездок лифта по интервалам счета (например, 1 час) в заданном периоде измерений (например, 1 сутки), получаемой в процессе осуществления нескольких последовательно проводимых циклов измерений в заданном периоде. Данные для обучения получают в процессе реальной эксплуатации лифта.
Перед началом эксплуатации лифта устанавливают датчик 1.1 движения кабины, который в этом примере выполнен в виде по меньшей мере двух магнитов, прикрепленных с чередующей магнитной полярностью к колесу ограничителя скорости кабины, имеющемуся у каждого лифта в составе приводных элементов, и датчика Холла, стационарно расположенного в непосредственной близости от магнитов. При движении лифта магниты вращаются вместе с колесом и каждое прохождение магнитов или изменение направления их движения регистрируются датчиком Холла. Датчик Холла формирует пакет импульсов определенной полярности и передает на вход блока 2.1 преобразователя, который преобразует последовательность импульсов в сигналы каждой поездки кабины лифта и передает их в блок 3.1 обработки. Блок 3.1 обработки посредством временного счетчика 5.1 соотносит полученные данные с данными часов 6.1 реального времени, располагая их по интервалам счета в заданном периоде измерений. Вычислительный элемент 7.1, используя соответствующую программу, накапливает поступающие с временного счетчика 5.1 значения распределения по интервалам счета числа поездок в заданный период и осуществляет последовательное накопление минимально необходимого для обучения устройства количества циклов измерений заданных периодов. По мере накопления данных минимально необходимого для обучения устройства количества циклов измерений вычислительный элемент 7.1 усредняет результаты замеров по каждому интервалу счета заданных периодов в периоде усреднения. По вычисленным данным о математическом ожидании числа поездок по интервалам счета в периоде усреднения узел 8.1 сравнения определяет персональный порог принятия решения о выработке сигнала рассогласования для каждого интервала счета. По окончании процесса обучения узел 8.1 сравнения сравнивает данные полученных измерений, получаемые со счетчика 9.1 числа поездок в каждом интервале счета, с полученным от вычислительного элемента 7.1 математическим ожиданием числа поездок по интервалам счета в периоде усреднения. При отклонении от порога принятия решения в каждом конкретном интервале узел 8.1 сравнения формирует сигнал рассогласования, который по радиоканалу выводит на блок индикации пункта дистанционного контроля. Сбор данных о поездках осуществляется постоянно в процессе эксплуатации лифта и в результате их обработки осуществляется корректировка значений математического ожидания в периоде усреднения.
Между лифтами и пунктом дистанционного контроля устанавливается симплексная радиосвязь с использованием сложных сигналов с комбинированной амплитудной модуляцией и фазовой манипуляцией (АМ-ФМн) на одной несущей частоте.
При передаче сообщений с лифта на пункт дистанционного контроля включается задающий генератор 15.1, который формирует высокочастотное колебание
uc1(t)=Uc1⋅cos(ωct+ϕc1), 0≤t≤Tc1,
где Uc1, ωс, ϕс1, Tc1 - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания соответственно. Высокочастотное колебание поступает на первый выход амплитудного модулятора 17.1. На второй вход амплитудного модулятора 17.1 с выхода источника 16.1 аналоговых сообщений подается модулирующая функция m1(t), содержащая аналоговую информацию. В качестве аналоговой информации может быть речевое сообщение пассажира, застрявшего в лифте. Например, «Улица Ленина, дом 3, подъезд 4, между 5 и 6 этажами остановился лифт».
На выходе амплитудного модулятора 17.1 образуется амплитудно-модулированный (AM) сигнал
u1(t)=Uc1[1+m1(t)]⋅cos(ωct+ϕc1), 0≤t≤Tc1,
который поступает на первый вход фазового манипулятора 18.1, на второй вход которого подается модулирующий код MΣ1(t), который формируется следующим образом. Сигнал рассогласования, характеризующий работу лифта, с выхода узла 8.1 сравнения поступает на вход преобразователя 10.1 аналог-код, где он преобразуется в цифровой код M1(t), который поступает на вход линии задержки 11.1, время задержки τз, который выбирается равной длительности T1 цифрового кода M1(t), а затем на второй вход сумматора 13.1. На первый вход сумматора 13.1 поступает модулирующий код Mи(t) с выхода генератора 12.1 псевдослучайной последовательности (ПСП). Модулирующий код Mи(t) является идентификационным кодом лифта. На выходе сумматора 13.1 образуется суммарный код MΣ1(t)
MΣ1(t)=Mи(t)+M1(t),
который поступает на второй вход фазового манипулятора 18.1, на выходе которого формируется сложный сигнал с комбинированной амплитудной модуляцией и фазовой манипуляцией (АМ-ФМн)
u2(t)=Uc1[1+m1(t)]⋅cos[ωct+ϕк1(t)+ϕc1], 0≤t≤Tc1,
где ϕк1(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом MΣ1(t), причем ϕк1(t)=const при kτэ<t<(k+1)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (k=0, 1, 2, …, N1-1);
τэ, N - длительность и количество элементарных посылок соответственно, из которых составлен сигнал длительностью Tc1 (Tc1=N1⋅τэ), который после усиления в усилителе 19.1 мощности поступает в передающую антенну 20.1 и излучается ею в эфир, принимается приемной антенной 21 приемного модема 14, размещенного на пункте дистанционного контроля, и через усилитель 22 высокой частоты поступает на первый вход смесителя 24, на второй вход которого подается напряжение гетеродина 23
uг(t)=Uг⋅cos(ωгt+ϕг).
На выходе смесителя 24 образуются напряжения комбинационных частот. Усилителем промежуточной частоты 25 выделяется напряжение промежуточной частоты
uпр(t)=Uпр[1+m1(t)]⋅cos[ωпрt+ϕк1(t)+ϕпр], 0≤t≤Tс1,
где  ;
;
ωпр=ωc1-ωг - промежуточная (разностная) частота;
ϕпр=ϕс1-ϕг, которое поступает на первый (информационный) вход синхронного детектора 27 и на вход амплитудного ограничителя 26. На выходе последнего образуется напряжение
uc(t)=Uогр⋅cos[ωпрt+ϕк1(t)+ϕпр], 0≤t≤Yc1,
где  - порог ограничения амплитудного ограничителя 26.
- порог ограничения амплитудного ограничителя 26.
Указанное напряжение представляет собой сложный сигнал с фазовой манипуляцией (ФМн), используется в качестве опорного напряжения и подается на второй (опорный) вход синхронного детектора 27. На выходе синхронного детектора 27 формируется низкочастотное напряжение
uн1(t)=Uн1[1+m1(t)], 0≤t≤Tс1,
где  , пропорциональное модулирующей функции m1(t), которое фиксируется на первом входе блока регистрации 28.
, пропорциональное модулирующей функции m1(t), которое фиксируется на первом входе блока регистрации 28.
Сложный ФМн сигнал uc(t) с выхода амплитудного ограничителя 26 одновременно поступает на первые входы первого 30 и второго 31 перемножителей. На второй вход второго перемножителя 31 подается гармоническое колебание с выхода узкополосного фильтра 32
uo(t)=Uo cos(ωпрt+ϕпр), 0≤t≤Tс1.
На выходе второго перемножителя 31 образуется суммарное напряжение
uΣ(t)=Uн2⋅cosϕк1(t)+Uн2 cos[2ωпрt+ϕк1(t)+2ϕпр],
где  ; из которого фильтром 33 нижних частот выделяется низкочастотное напряжение
; из которого фильтром 33 нижних частот выделяется низкочастотное напряжение
uн2(t)=Uн2⋅cos ϕк1(t), 0≤t≤Tс1,
пропорциональное модулирующему коду MΣ(t), которое фиксируется на втором входе блока 28 регистрации.
Одновременно это напряжение подается на второй вход первого перемножителя 30. На выходе последнего образуется напряжение
Uo(t)=U1⋅cos (ωпрt+ϕпр)+U1 cos[ωпрt+2ϕк1(t)+ϕпр]=2U1⋅cos(ωпрt+ϕпр)=Uo⋅cos(ωпрt+ϕпр),
где  ;
;
Uo=2U1, которое выделяется узкополосным фильтром 32 и поступает на второй вход второго перемножителя 31.
При этом первый 30 и второй 31 перемножители, узкополосный фильтр 32 и фильтр 33 нижних частот образуют универсальный демодулятор сложных ФМн сигналов 29, который свободен от явления «обратной работы», присущей известным демодуляторам сложных ФМн сигналов (схемы Пистолькорса А.А., Сифорова В.И., Костаса Д.Ф. и Травина Г.А.).
Таким образом, заявляемые способ и устройство по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивают повышение эффективности дистанционного контроля лифтов. Это достигается установлением симплексной радиосвязи между наблюдаемыми лифтами и пунктом дистанционного контроля с использованием сложных сигналов с комбинированной амплитудной модуляцией и фазовой манипуляцией (АМ-ФМн) на одной несущей частоте
Сложные сигналы с комбинированной амплитудной модуляцией и фазовой манипуляцией (АМ-ФМн) обладают высокой энергетической и структурной скрытностью.
Высокая энергетическая скрытность сложных АМ-ФМн-сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить излучаемую мощность. Вследствие этого сложный АМ-ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного АМ-ФМн сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Высокая структурная скрытность сложных АМ-ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных АМ-ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Сложные АМ-ФМн-сигналы открывают новые возможности в технике передачи сообщений. Указанные сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность разделять сигналы, действующие в одной и той же полосе частот и в одни и те же промежутки времени. Принципиально можно отказаться от традиционного метода разделения рабочих частот используемого диапазона между работающими модемами и селекцией их на приемной стороне с помощью частотных фильтров. Его можно заменить новым методом, основанным на одновременной работе каждого модема во всем диапазоне частот сигналами со сложной структурой с выделением радиоприемным устройством сигнала необходимого модема посредством его структурной селекции.
Следовательно, использование сложных АМ-ФМн-сигналов позволяет осуществлять уверенный обмен информацией между наблюдаемыми лифтами и пунктом дистанционного контроля при наличии весьма мощных мешающих узкополосных сигналов в полосе пропускания приемников. Таким путем может быть решена задача, с которой метод частотной селекции принципиально не может справиться.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2006 |
|
RU2313911C1 |
| УСТРОЙСТВО ДЛЯ ОПОВЕЩЕНИЯ О ПАВОДКЕ ИЛИ СЕЛЕ | 1999 |
|
RU2150751C1 |
| УСТРОЙСТВО ДЛЯ ОПОВЕЩЕНИЯ О ПАВОДКЕ ИЛИ СЕЛЕ | 2000 |
|
RU2190255C2 |
| Устройство считывания информации с подвижных объектов железнодорожных составов | 2020 |
|
RU2735146C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ | 2016 |
|
RU2615919C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В ДВУХПРОВОДНЫХ СЕТЯХ С ЗАЩИТОЙ ОТ ХИЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2439588C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2330295C1 |
| ЭЛЕКТРОННЫЙ ЗАМОК | 2005 |
|
RU2283412C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ВЫСОКОТЕХНОЛОГИЧНЫХ СТРОИТЕЛЬНЫХ МОДУЛЕЙ | 2016 |
|
RU2619200C1 |
| Акустооптический приемник | 2015 |
|
RU2619454C2 |
Изобретение относится к области устройств лифтовых установок для дистанционного контроля состояния лифтов. Устройство, реализующее способ дистанционного контроля, включает датчик движения кабины, блок преобразователя, блок обработки, временной счетчик с часами реального времени, вычислительный элемент, узел сравнения, счетчик числа поездок, преобразователь аналогового кода, линию задержки, сумматор, генератор псевдослучайной последовательности, модемы, задающий генератор, источник аналогового сообщения, амплитудный модулятор, фазовый манипулятор, усилитель мощности, передающую антенну, приемную антенну, усилитель высокой частоты, гетеродин, смеситель, усилитель промежуточной частоты, амплитудный ограничитель, синхронный детектор, блок регистрации, демодулятор сложных сигналов с комбинированной амплитудной модуляцией и фазовой манипуляцией, перемножители, узкополосный фильтр и фильтр нижних частот. Достигается повышение эффективности дистанционного контроля лифтов путем использования сложных сигналов с комбинированной амплитудной модуляцией и фазовой манипуляцией. 2 н.п. ф-лы, 2 ил.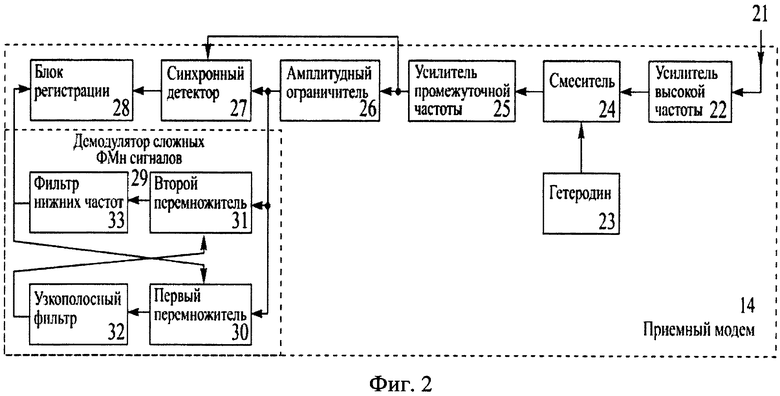
1. Способ дистанционного контроля лифтов, заключающийся в сборе данных для использования в процессе дистанционного контроля, при котором проводят предварительное обучение путем сбора данных, измеренных в последовательном порядке в заданный период измерений, при этом проводят по меньшей мере один цикл измерений заданного периода, накапливают информацию по каждому циклу измерений, усредняют накопленные данные минимально необходимого для обучения устройства количества циклов измерений в периоде усреднения, представляя их в виде значений математического ожидания, затем, исходя из полученных в процессе обучения данных периода усреднения, определяют порог принятия решения, свидетельствующий об изменении состояния лифта, далее сравнивают данные текущих измерений со значениями математического ожидания в периоде усреднения и при несоответствии данных текущих измерений порогу принятия решения формируют сигнал рассогласования, который выводят на индикатор, по результатам текущих измерений осуществляют корректировку значений математического ожидания в периоде усреднения, в качестве собираемых данных фиксируют сигналы, соответствующие движению лифта, преобразуют эти сигналы в сигналы числа поездок лифта в заданный период, который разделяют на интервалы счета и соотносят полученные данные с данными часов реального времени, располагая их по интервалам счета в заданном периоде измерений в виде математического ожидания числа поездок лифта отдельно в каждом интервале счета, и порог принятия решения определяют персонально для каждого интервала счета, отличающийся тем, что каждый лифт и пункт дистанционного контроля снабжают модемами, в модеме каждого лифта формируют гармоническое колебание с частотой ωс, модулируют его по амплитуде аналоговым сообщением, манипулируют по фазе дискретным сообщением, формируя сложный сигнал с комбинированной амплитудной модуляцией и фазовой манипуляцией, усиливают его по мощности и излучают в эфир, улавливают на пункте дистанционного контроля, усиливают по напряжению, преобразуют по частоте с использованием частоты ωг гетеродина, выделяют напряжение промежуточной частоты ωпр=ωс-ωг, ограничивают его по амплитуде, формируя сложный сигнал с фазовой манипуляцией, используют его в качестве опорного напряжения для синхронного детектирования сигнала с амплитудной модуляцией, выделяют низкочастотное напряжение, пропорциональное аналоговому сообщению, и регистрируют его, сложный сигнал с фазовой манипуляцией на промежуточной частоте ωпр перемножают с гармоническим колебанием на промежуточной частоте ωпр, выделяют низкочастотное напряжение, пропорциональное дискретному сообщению, и регистрируют его, одновременно указанное низкочастотное напряжение перемножают со сложным сигналом с фазовой манипуляцией на промежуточной частоте ωпр и выделяют гармоническое колебание на промежуточной частоте ωпр.
2. Устройство для дистанционного контроля лифтов, включающее кабину лифта с приводными элементами и блоком управления лифтом, блок индикации и последовательно включенные датчик движения кабины, блок преобразователя и блок обработки, содержащий временной счетчик с часами реального времени, вход которого является входом блока обработки, а к выходу последовательно подключены вычислительный элемент и узел сравнения, второй вход которого через счетчик числа поездок в каждом интервале счета соединен с выходом блока преобразователя, а выход является выходом блока обработки, при этом датчик движения кабины лифта выполнен в виде по меньшей мере двух магнитов, установленных с чередующейся магнитной полярностью на колесе ограничителя скорости лифта, и датчика магнитного поля, например датчика Холла, стационарно расположенного в непосредственной близости от магнитов, отличающееся тем, что снабжено пунктом дистанционного контроля, при этом каждый лифт и пункт дистанционного контроля снабжены модемами, модем каждого лифта содержит последовательно включенные задающий генератор, амплитудный модулятор, второй вход которого соединен с выходом источника аналогового сообщения, фазовый манипулятор, второй вход которого соединен с выходом сумматора, усилитель мощности и передающую антенну, а модем пункта дистанционного контроля содержит последовательно включенные приемную антенну, усилитель высокой частоты, смеситель, второй вход которого соединен с выходом гетеродина, усилитель промежуточной частоты, амплитудный ограничитель, синхронный детектор, второй вход которого соединен с выходом усилителя промежуточной частоты, и блок регистрации, последовательно подключенные к выходу амплитудного ограничителя первый перемножитель, второй вход которого соединен с выходом фильтра нижних частот, узкополосный фильтр, второй перемножитель, второй вход которого соединен с выходом амплитудного ограничителя, и фильтр нижних частот, выход которого соединен со вторым входом блока регистрации.
| RU 2012127277 A, 27.12.2013 | |||
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2010 |
|
RU2425423C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ЛИФТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2384511C1 |
| RU 2011126064 A, 27.12.2012 | |||
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА АНАЛОГОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2106747C1 |
| RU 2012126500 A, 20.12.2013 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

