Изобретение относится к области транспорта, в частности лифтовым установкам, и может быть использовано для дистанционного контролирования состояния каждого лифта.
Контроль состояния лифта заключается в отслеживании его работы путем измерения различных параметров. При дистанционном контроле состояния лифтов сами лифты, как правило, обеспечивают индикацию неисправностей.
Известны способы и реализующие их устройства для дистанционного контроля лифтов из патента РФ №2317241, В66В 1/06, 5/00, Н04В 3/60, 2005 г. и заявки РФ №2005116824, В66В 1/00, 2006 г., собирающие данные от нескольких датчиков, в том числе датчиков ускорения или скорости перемещения лифтов. Собранные данные обрабатывают соответствующими блоками и сравнивают с пороговыми значениями, отклонение от которых свидетельствует об изменении состояния контролируемых лифтов.
Однако эти способы не обеспечивают достаточную надежность и достоверность получаемого результата, т.к. требуют весьма сложного схемного исполнения реализующего их устройства, а также программного обеспечения для обработки различных измеренных параметров и выбора единого критерия оценки состояния лифта.
Известен способ, описанный в патенте РФ №2321533, В66В 5/00, 2008 г., «Способ и устройство для дистанционного контроля лифтов», при котором осуществляют сбор данных, предназначенных для использования в процессе дистанционного контроля лифта. Информацию собирают в зависимости от времени и расстояния, проходимого кабиной лифта, с помощью устройств для сбора, по меньшей мере, одного из типов данных, включая звуковые данные, видеоданные, данные положения двери и данные положения кабины, ускорение. При этом измерительные устройства, получающие данные измерений, включают, по меньшей мере, одно из таких устройств, как видеокамера, микрофон, датчик ускорения, устройство измерения веса кабины, фотодатчик и т.п.
Известный способ дополнительными пунктами предусматривает возможность проведения «обучения» путем осуществления нескольких циклов, синхронизированных друг с другом ходовых испытаний.
При осуществлении способа сначала проводят тест для определения возможности начала «обучающих» испытаний (пуста ли кабина). Далее проводят проверку соответствия всем параметрам синхронизации. Параметрами синхронизации являются время движения между этажами и время остановки на каждом этаже во время каждого цикла ходовых испытаний. Затем проводят обучение, для чего собирают данные измерений каждого цикла и сохраняют их для использования в системе контроля режима работы лифта. Далее вычисляют среднее значение измеренных данных. Вычисленное таким образом среднее значение сравнивают с пороговым значением, соответствующим нормальному режиму работы или состояния лифта. По результатам сравнения судят о состоянии и работе лифта.
Однако этот способ не может обеспечить достаточную надежность и достоверность контроля лифта, т.к. устройство для его реализации с большим количеством датчиков, измеряющих различные параметры, подлежащие обработке, требует сложного схемного исполнения и программного обеспечения. Кроме того, этот способ является затратным по времени и персоналу, т.к. требует вывода лифта из эксплуатации для проведения операций по тестированию, а также подготовке к процессу обучения и самому процессу обучения.
Наиболее близким по технической сущности заявляемому способу является способ для дистанционного контроля лифтов из патента WO 03033388, В66В 5//00, 2003 г, который предусматривает при перемещении лифта сбор данных, по меньшей мере, одним датчиком ускорения. Измеренные данные ускорения непосредственно передают в блок обработки, где математическим путем из измеренных сигналов определяют стандартные параметры, такие как скорость, пройденный путь и т.п. Затем осуществляют расчет характеристических заданных параметров посредством математической обработки результатов измерений в заданном периоде в процессе повторяемых циклов испытаний лифтовой установки. Измерения для расчета заданных параметров осуществляют в последовательном порядке измеренных состояний лифтовой установки и сохраняют в накопителе блока обработки. Заданные параметры циклов измерений заданных периодов, количество которых минимально необходимо для обучения устройства, усредняют в периоде усреднения, который включает вычисленные значения математического ожидания с учетом накопленных данных. В процессе эксплуатации лифта сравнивают данные текущих измерений, пересчитанных в стандартные параметры, со значениями математического ожидания периода усреднения, заданными также в последовательном порядке. При отклонении измеренного сигнала, пересчитанного в стандартные параметры, от заданных параметров формируют сигнал рассогласования и выводят его на индикатор, сигнализирующий изменение состояния лифта. Диагностика осуществляется постоянно во время эксплуатации лифта, при этом по результатам постоянно осуществляемых текущих измерений и их обработки осуществляют корректировку значений математического ожидания в периоде усреднения.
Этот способ позволяет автоматически осуществлять постоянное диагностирование лифта во время эксплуатации, однако он требует весьма сложного схемного исполнения устройства, его реализующего, и программного обеспечения, учитывая сложность выбора и обеспечения критерия оценки работоспособности лифта. Это определяется тем, что в качестве исходной информации используется ненормированная величина - ускорение, которая жестко зависит от конкретного типа исполнения лифта (тип привода, тип лебедки), а также от этажности строения, что приводит к снижению надежности и достоверности получаемого на индикаторном блоке сигнала рассогласования. Кроме того, его проблематично использовать в системах, содержащих лифты различных типов исполнения.
Известно устройство для контроля состояния лифта по патенту РФ №2321533, В66В 5/00, 2008 г., включающее кабину лифта, датчики данных измеряемых параметров, установленные с обеспечением их связи с кабиной, блок обработки каждого вида измеренных датчиками данных. Связь блока обработки с центром технического контроля обеспечивается беспроводным устройством для передачи данных (передатчик и приемник). В качестве датчиков данных измеряемых параметров для обработки использованы: видеокамеры, средства сбора данных о дверях, весе кабины, ускорении и т.п.
Это устройство не может обеспечить достаточную достоверность и надежность контроля состояния лифта, т.к. наличие в нем большого количества датчиков, измеряющих различные параметры, подлежащие обработке, требуют сложного схемного исполнения.
Наиболее близким по технической сущности заявляемому устройству является устройство для диагностирования лифта, описанное в патенте № WO 03033388, В66В 5//00, 2003 г, включающее кабину лифта с приводными элементами и блоком управления лифтом. В устройстве использован, по меньшей мере, один датчик ускорения для измерения ускорения кабины лифта, который смонтирован в кабине и непосредственно связан с блоком обработки, выход которого, в свою очередь, связан с блоком индикации. Блок обработки служит для определения из измеренных данных - ускорения кабины лифта, стандартных параметров (скорости, пути) и накопления заданных параметров, которые были измерены в последовательном порядке в заданном периоде измерений при проведении, по меньшей мере, одного цикла испытаний. Заданные параметры всех циклов испытаний устройство усредняет в периоде усреднения, который включает вычисленные значения математического ожидания с учетом накопленных данных всех циклов измерений заданных периодов, минимально необходимых для обучения устройства. В процессе работы устройство сравнивает постоянно измеряемые датчиком ускорения данные, пересчитанные в стандартные параметры, с заданными параметрами периода усреднения из накопителя, представленными в виде математического ожидания, и вырабатывает сигнал рассогласования, свидетельствующий об изменении состояния лифта, который передает на блок индикации. По результатам постоянно осуществляемых текущих измерений и их обработки автоматически осуществляется корректировка накопленных значений в периоде усреднения,
Исходя из выполняемых блоком обработки функций, он включает вычислительный элемент с накопителем и узел сравнения.
В отличие от предыдущих устройств это устройство позволяет выполнять автоматическое постоянное диагностирование во время эксплуатации лифта, однако оно требует весьма сложного схемного исполнения, учитывая сложность выбора и обеспечения критерия оценки работоспособности лифта. Это определяется тем, что в качестве исходной информации используется ненормированная величина - ускорение, которая жестко зависит от конкретного типа исполнения лифта, что, в конечном счете, снижает надежность устройства и достоверность получаемого на индикаторном блоке сигнала.
Задачей настоящего изобретения является повышение надежности способа и устройства контроля систем лифта за счет их упрощения.
Поставленная задача решается тем, что в способе для дистанционного контроля лифтов, заключающемся в сборе данных для использования в процессе дистанционного контроля, при котором проводят предварительное обучение путем сбора данных, измеренных в последовательном порядке в заданный период измерений; проводят, по меньшей мере, один цикл измерений заданного периода; накапливают информацию по каждому циклу измерений; усредняют накопленные данные минимально необходимого для обучения устройства количества циклов измерений в периоде усреднения, представляя их в виде значений математического ожидания, затем исходя из полученных в процессе обучения данных периода усреднения определяют порог принятия решения, свидетельствующий об изменении состояния лифта; далее сравнивают данные текущих измерений со значениями математического ожидания в периоде усреднения и при несоответствии данных текущих измерений порогу принятия решения формируют сигнал рассогласования, который выводят на индикатор, при этом по результатам текущих измерений осуществляют корректировку значений математического ожидания в периоде усреднения, согласно изобретению в качестве собираемых данных фиксируют сигналы, соответствующие движению лифта, преобразуют эти сигналы в сигналы числа поездок лифта в заданный период, который разделяют на интервалы счета и соотносят полученные данные с данными часов реального времени, располагая их по интервалам счета в заданном периоде измерений в виде математического ожидания числа поездок лифта отдельно в каждом интервале счета, и порог принятия решения определяют персонально для каждого интервала счета.
Поставленная задача в предлагаемом устройстве решается тем, что устройство для дистанционного контроля лифта, содержащее кабину лифта с приводными элементами и блоком управления лифтом, датчик данных, связанный с последовательно подключенными блоком обработки и блоком индикации, а также, по меньшей мере, одно средство для передачи данных, при этом блок обработки включает вычислительный элемент с накопителем и узлом сравнения, вход которого соединен с вычислительным элементом, а выход является выходом блока обработки, согласно изобретению устройство дополнительно содержит блок преобразователя, включенный между датчиком данных и блоком обработки, а блок обработки дополнительно снабжен временным счетчиком с часами реального времени, вход которого является входом блока обработки, а выход подключен ко входу вычислительного элемента, и счетчиком числа поездок в каждом интервале счета, вход которого подключен ко входу блока обработки, а выход соединен с другим входом узла сравнения, при этом в качестве датчика данных использован датчик движения кабины лифта.
Датчик движения может быть выполнен в виде, по меньшей мере, двух магнитов, установленных с чередующейся магнитной полярностью на колесе ограничителя скорости, и датчика магнитного поля, например датчика Холла, расположенного в непосредственной близости от магнитов.
Для обеспечения удобного расположения блоков устройства при дистанционном контроле лифта может быть использовано проводное или беспроводное средство передачи данных между блоком преобразования и блоком обработки и/или между блоком обработки и блоком индикации.
Использование в совокупностях существенных признаков способа и устройства новых признаков, позволяющих собирать и обрабатывать данные о числе поездок лифта по заданным интервалам счета, значительно упрощает выбор критерия оценки работоспособности лифта, что обеспечивает достижение заявленного технического результата, а именно упрощение и способа, и устройства, и, как следствие, повышает надежность и достоверность получаемого результата.
На чертеже приведена блок схема заявляемого устройства для осуществления заявляемого способа.
Устройство содержит кабину лифта с приводными элементами и датчик движения кабины 1, расположенный на приводных элементах лифта. Датчик движения кабины 1 может быть любым, например выполненным в виде, по меньшей мере, двух магнитов, установленных с чередующейся магнитной полярностью на колесе ограничителя скорости лифта, и любого датчика магнитного поля, например датчика Холла, стационарно расположенного в непосредственной близости от магнитов. Также он может быть организован с использованием геркона и магнитов или оптопары с устройством прерывания светового потока и т.п. Датчик движения кабины 1 связан с блоком преобразователя 2, который преобразует получаемую с датчика движения кабины 1 последовательность импульсов в сигналы, отражающие каждую поездку кабины лифта. Блок преобразователя 2 соединен с блоком обработки 3, выход которого соединен с блоком индикации 4.
Блок преобразователя 2 может быть выполнен как аналоговым способом, (например, интегратор на операционном усилителе КР140УД608 с компаратором КР544СА3), так и цифровым, (например, счетчик К555ИЕ6 с триггером К555ТМ2 и формирователем сигнала К155АГ3).
Блок обработки 3 включает временной счетчик 5 с часами реального времени 6, вход которого является входом блока обработки 3, а выход соединен со входом вычислительного элемента 7, выход которого соединен с одним входом узла сравнения 8. Другой вход узла сравнения 8 подключен к выходу счетчика числа поездок в каждом интервале счета 9, а выход узла сравнения 8 является выходом блока обработки 3, соединенным с блоком индикации 4. При этом вход счетчика числа поездок в каждом интервале счета 9 подключен ко входу блока обработки 3. Средства передачи данных между основными блоками, а именно между блоком преобразователя 2 и блоком обработки 3 и/или между блоком обработки 3 и блоком индикации 4, могут быть проводными или беспроводными, например сети операторов GSM или CDMA, коммутируемая или выделенная телефонная линия, радиомодемы, сети Ethernet (Internet) и т.п. В качестве элементов блока обработки могут быть использованы, например, микроконтроллер с часами реального времени DS87C530 либо микроконтроллер AT89S8253 и часы реального времени DS1307. В качестве блока индикации 4 могут быть использованы ЖКИ - индикатор и/или светодиодный индикатор.
Способ с использованием заявляемого варианта устройства осуществляется следующим образом.
Способ предусматривает в начале эксплуатации лифта осуществление процедуры «обучения», которая включает накопление реальной статистики о числе поездок лифта по интервалам счета (например, 1 час) в заданном периоде измерений (например, 1 сутки), получаемой в процессе осуществления нескольких последовательно проводимых циклов измерений в заданном периоде. Данные для обучения получают в процессе реальной эксплуатации лифта.
Перед началом эксплуатации лифта устанавливают датчик движения кабины 1, который в этом примере выполнен в виде, по меньшей мере, двух магнитов, прикрепленных с чередующейся магнитной полярностью к колесу ограничителя скорости кабины, имеющемуся у каждого лифта в составе приводных элементов, и датчика Холла, стационарно расположенного в непосредственной близости от магнитов. При движении лифта магниты вращаются вместе с колесом, и каждое прохождение магнитов или изменение направления их движения регистрируется датчиком Холла. Он формирует пакет импульсов определенной полярности и передает на вход блока преобразователя 2, который преобразует последовательность импульсов в сигналы каждой поездки кабины лифта, и передает их в блок обработки 3. Блок обработки 3 посредством временного счетчика 5 соотносит полученные данные с данными часов реального времени 6, располагая их по интервалам счета в заданном периоде измерений. Вычислительный элемент 7, используя соответствующую программу, накапливает поступающие с временного счетчика 5 значения распределения по интервалам счета числа поездок в заданный период и осуществляет последовательное накопление минимально необходимого для обучения устройства количества циклов измерений заданных периодов. По мере накопления данных минимально необходимого для обучения устройства количества циклов измерений вычислительный элемент 7 усредняет результаты замеров по каждому интервалу счета заданных периодов в периоде усреднения. По вычисленным данным о математическом ожидании числа поездок по интервалам счета в периоде усреднения узел сравнения 8 определяет персональный порог принятия решения о выработке сигнала рассогласования для каждого интервала счета. По окончании процесса обучения узел сравнения 8 сравнивает данные текущих измерений, получаемые со счетчика числа поездок в каждом интервале счета 9, с полученным от вычислительного элемента 7 математическим ожиданием числа поездок по интервалам счета в периоде усреднения. При отклонении от порога принятия решения в каждом конкретном интервале счета узел сравнения 8 формирует сигнал рассогласования, который выводит на блок индикации 4. Сбор данных о поездках осуществляется постоянно в процессе эксплуатации лифта, и в результате их обработки осуществляется корректировка значений математического ожидания в периоде усреднения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дистанционного контроля лифтов и устройство для его осуществления | 2016 |
|
RU2661256C2 |
| Способ определения времени простоя лифта и его исправности | 2020 |
|
RU2737567C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ДИСТАНЦИОННОГО ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ЛИФТА | 2003 |
|
RU2317241C2 |
| Рабочее место-тренажер машиниста-оператора беспилотного подвижного состава | 2022 |
|
RU2780698C1 |
| СПОСОБ И СИСТЕМА ОПТИМИЗАЦИИ РАБОТЫ ЛИФТА | 2017 |
|
RU2669755C1 |
| СПОСОБ САНКЦИОНИРОВАННОГО ДОСТУПА К УПРАВЛЕНИЮ ЛИФТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2310597C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ ЛИЧНОСТИ | 1998 |
|
RU2161826C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ЛИФТА | 2003 |
|
RU2321533C2 |
| Устройство контроля гранулометрического состава сыпучих веществ | 1980 |
|
SU898297A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИЧНОСТИ ПО ОСОБЕННОСТЯМ ПОДПИСИ | 1998 |
|
RU2148274C1 |
Изобретение относится к подъемно-транспортным устройствам, в частности к устройствам дистанционного контроля технического состояния лифтов. Способ дистанционного контроля лифтов заключается в сборе данных для использования в процессе дистанционного контроля, при котором проводят предварительное обучение. В качестве собираемых данных фиксируют сигналы, соответствующие движению лифта. Далее преобразуют эти сигналы в сигналы числа поездок лифта в заданный период, который разделяют на интервалы счета и соотносят полученные данные с данными часов реального времени, располагая их по интервалам счета в заданном периоде измерений в виде математического ожидания числа поездок лифта отдельно в каждом интервале счета. Порог принятия решения определяют персонально для каждого интервала счета. Устройство, реализующее этот способ, содержит кабину лифта с приводными элементами и блоком управления лифтом, датчик движения кабины лифта, блок обработки, преобразователь, включенный между датчиком и блоком обработки, по меньшей мере, одно средство передачи данных. Причем блок обработки содержит вычислительный элемент с накопителем, узел сравнения, вход которого соединен с вычислительным элементом, а выход является выходом блока обработки, временной счетчик с часами реального времени, вход которого является входом блока обработки, а выход соединен с вычислительным элементом, счетчик числа поездок в каждом интервале счета, вход которого подключен ко входу блока обработки, а выход соединен с другим входом узла сравнения. Изобретение обеспечивает повышение надежности и достоверности оценки работоспособности лифтов. 2 н. и 2 з.п. ф-лы, 1 ил.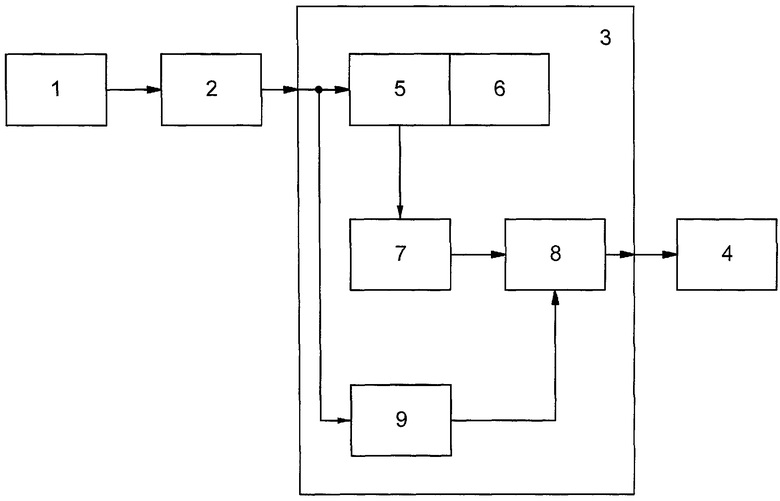
1. Способ для дистанционного контроля лифтов, заключающийся в сборе данных для использования в процессе дистанционного контроля, при котором проводят предварительное обучение путем сбора данных, измеренных в последовательном порядке, в заданный период измерений, причем проводят, по меньшей мере, один цикл измерений заданного периода, накапливают информацию по каждому циклу измерений, усредняют накопленные данные минимально необходимого для обучения устройства количества циклов измерений в периоде усреднения, представляя их в виде значений математического ожидания, затем, исходя из полученных в процессе обучения данных периода усреднения, определяют порог принятия решения, свидетельствующий об изменении состояния лифта, далее сравнивают данные текущих измерений со значениями математического ожидания в периоде усреднения и при несоответствии данных текущих измерений порогу принятия решения формируют сигнал рассогласования, и выводят его на индикатор, при этом по результатам текущих измерений осуществляют корректировку значений математического ожидания в периоде усреднения, отличающийся тем, что в качестве собираемых данных фиксируют сигналы, соответствующие движению лифта, преобразуют эти сигналы в сигналы числа поездок лифта в заданный период, который разделяют на интервалы счета и соотносят полученные данные с данными часов реального времени, располагая их по интервалам счета в заданном периоде измерений в виде математического ожидания числа поездок лифта отдельно в каждом интервале счета, и порог принятия решения определяют персонально для каждого интервала счета.
2. Устройство для дистанционного контроля лифтов, включающее кабину лифта с приводными элементами и блоком управления лифтом, датчик данных, блок обработки, связанный с блоком индикации, по меньшей мере, одно средство передачи данных, при этом блок обработки содержит вычислительный элемент с накопителем и узел сравнения, вход которого соединен с вычислительным элементом, а выход является выходом блока обработки, отличающееся тем, что оно дополнительно снабжено блоком преобразователя, включенным между датчиком данных и блоком обработки, а блок обработки дополнительно содержит временной счетчик с часами реального времени, вход которого является входом блока обработки, а выход соединен с вычислительным элементом, а также счетчик числа поездок в каждом интервале счета, вход которого подключен ко входу блока обработки, а выход соединен с другим входом узла сравнения, при этом в качестве датчика данных использован датчик движения кабины лифта.
3. Устройство по п.1, отличающееся тем, что датчик движения кабины лифта выполнен в виде, по меньшей мере, двух магнитов, установленных с чередующейся магнитной полярностью на колесе ограничителя скорости лифта, и датчика магнитного поля, например датчика Холла, стационарно расположенного в непосредственной близости от магнитов.
4. Устройство по п.1, отличающееся тем, что средство передачи данных между блоком преобразователя и блоком обработки, и/или между блоком обработки и блоком индикации, выполнено проводным или беспроводным.
| WO 03033388 A1, 24.04.2003 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ ДИСТАНЦИОННОГО ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ЛИФТА | 2003 |
|
RU2317241C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ЛИФТА | 2003 |
|
RU2321533C2 |
| JP 7252050 А, 03.10.1995 | |||
| Устройство для контроля радиоэлектронных объектов | 1986 |
|
SU1399773A1 |

