Область техники
Настоящее изобретение относится к области безбалансирного станка-качалки, в частности к системе ручного тормоза, используемой на безбалансирном станке-качалке.
Уровень техники
В области добычи нефти станок-качалка входит в состав оборудования, наиболее широко используемого для добычи нефти, и большинство станков-качалок, известных в уровне техники, являются балансирными. Существует ряд проблем с балансирными станками-качалками, включая низкий КПД механической передачи, высокий расход энергии, трудность технического обслуживания и высокий коэффициент отказов из-за их физических конструкций. Для решения этих проблем исследователи разработали безбалансирный станок-качалку. Приводной механизм известных безбалансирных станков-качалок расположен в высоком положении, так что тормозная система также расположена в высоком положении. Рабочие должны взбираться на верх станков-качалок для осуществления торможения (CN 102635655 A, 15.08.2012).
Поэтому такая тормозная система не может обеспечить быстрое торможение и несет в себе потенциальную опасность падения рабочих с высоты.
Раскрытие изобретения
Настоящее изобретение предлагает систему ручного тормоза, используемую на безбалансирном станке-качалке и решающую вышеуказанные проблемы.
Настоящее изобретение решает эти технические проблемы посредством применения следующих технических решений: изобретение предлагает систему ручного тормоза, используемую на беиззбалансирном станке-качалке, включающую приводной механизм, исполнительный механизм и главную ведущую звездочку. Приводной механизм установлен в нижней части станка-качалки, исполнительный механизм установлен на боковой стороне главной ведущей звездочки станка-качалки, и приводной механизм и исполнительный механизм соединены проволочным канатом.
Приводной механизм включает опору A, опору B, рукоять, полукруглый диск, соединительную тягу и нижний поворотный рычаг. Опора A и опора B неподвижно установлены на станке-качалке, полукруглый диск неподвижно установлен на опоре A, нижний поворотный рычаг имеет форму прямоугольного треугольника, прямой угол которого шарнирно соединен с опорой B. Дуговая направляющая расположена на полукруглом диске, нижний конец рукояти шарнирно соединен с центром полукруглого диска, ползун расположен на рукояти в месте, соответствующем дуговой направляющей, причем ползун устанавливают в дуговую направляющую и фиксируют на рукояти одновременно. Один конец соединительной тяги шарнирно соединен с рукоятью, ее другой конец шарнирно соединен с одним остроугольным концом нижнего поворотного рычага, и другой остроугольный конец нижнего поворотного рычага соединен с нижним концом проволочного каната.
Исполнительный механизм включает опору C, верхний поворотный рычаг, гнездо под пружину, приводной шпиндель и скользящую втулку. Опора C жестко установлена на верху станка-качалки, верхний поворотный рычаг также имеет форму прямоугольного треугольника, прямой угол которого шарнирно соединен с опорой C, его один острый угол соединен с верхним концом проволочного каната, и его другой острый угол шарнирно соединен с одним концом приводного шпинделя. Гнездо под пружину установлено с возможностью перемещения на верху опоры C и может быть зафиксировано крепежным болтом, скользящая втулка жестко установлена на верху опоры C, приводной шпиндель входит между гнездом под пружину и скользящей втулкой, и пружина расположена на приводном шпинделе между гнездом под пружину и скользящей втулкой. Затвор пружины расположен неподвижно на приводном шпинделе, пружина ограничена между затвором пружины и гнездом под пружину, и концевая часть приводного шпинделя входит между двумя соседними зубьями главной ведущей звездочки при торможении.
Ограничивающая стойка, которая расположена на нижней стороне точки шарнирного соединения опоры B и нижнего поворотного рычага, расположена на опоре B. Дуговая поверхность, которая соответствует приводному шпинделю, выполнена между двумя соседними зубьями главной ведущей звездочки.
Настоящее изобретение дает следующие положительные эффекты.
1. В настоящем изобретение приводной механизм и исполнительный механизм тормозной системы расположены по отдельности. Работа рукоятью на уровне земли может управлять исполнительным механизмом в высоком положении, чтобы осуществить задачу торможения. Нет необходимости взбираться на высоту для выполнения операции торможения, что обеспечивает быстрое торможение и устраняет возможную опасность падения рабочего с высоты.
2. Существуют очевидные различия между новым режимом торможения и известным уровнем техники. Режим торможения известной тормозной системы на станке-качалке заключается в осуществлении функции торможения путем блокировки вращающегося вала с наружной стороны. Тормозное усилие при торможении относительно невелико, и надежность торможения относительно невысокая. В настоящем изобретение торможение осуществляется путем введения приводного шпинделя между двумя зубьями главной ведущей звездочки. Надежность торможения значительно повышена по сравнению с известным уровнем техники.
3 Расположение ограничивающей стойки ограничивает интервал поворота нижнего поворотного рычага. Когда нижний поворотный рычаг доходит до предельного положения, это указывает, что приводной шпиндель полностью вышел из двух зубьев главной ведущей звездочки, и это облегчает оператору точное согласование главной ведущей звездочки и приводного шпинделя.
Краткое описание чертежей
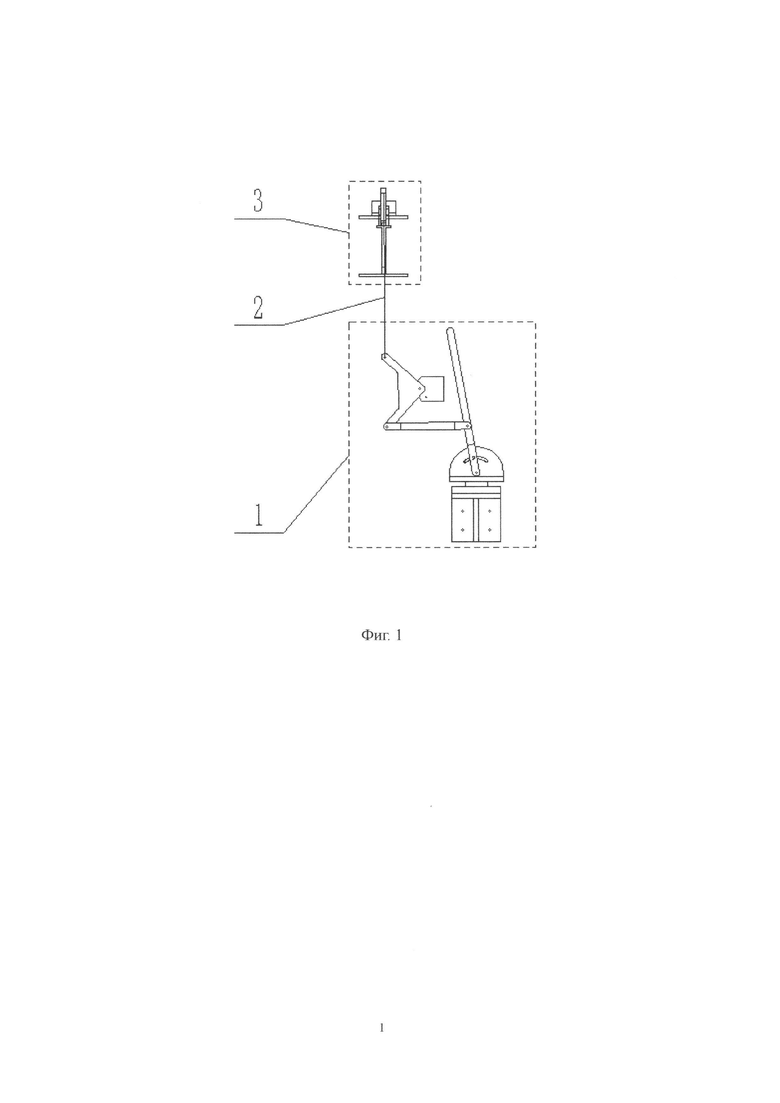
Фиг. 1 – схема конструкции настоящем изобретение;
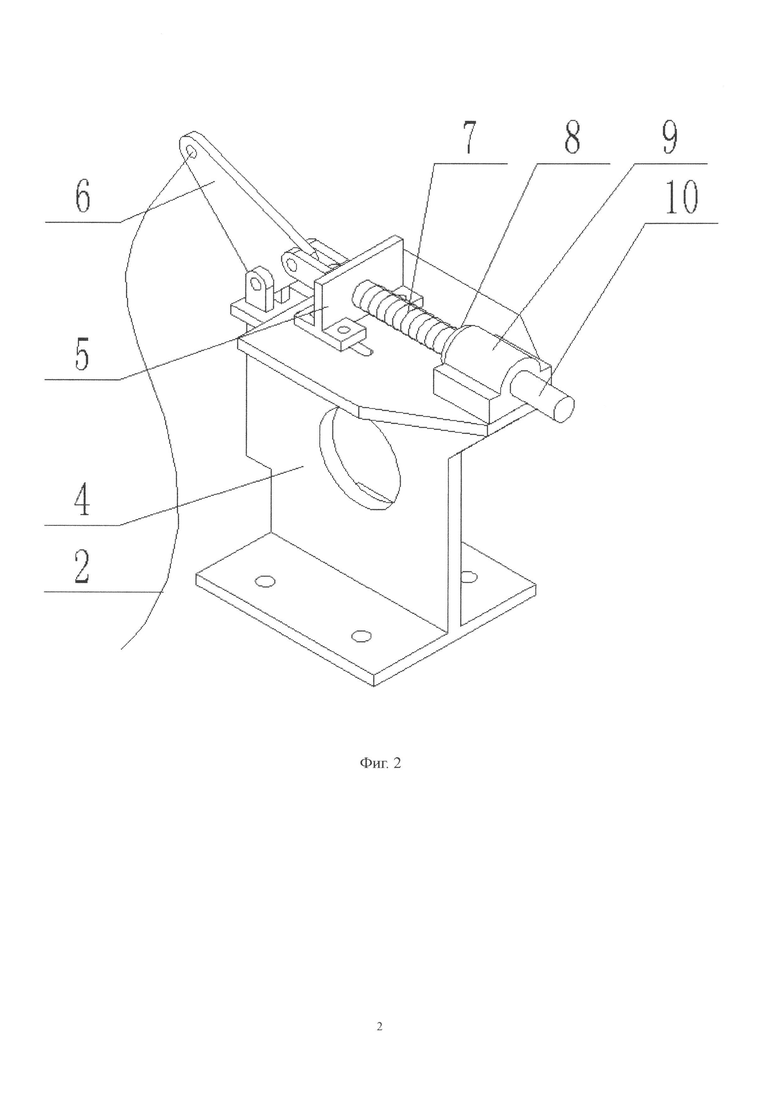
Фиг. 2 – схема конструкции исполнительного механизма;
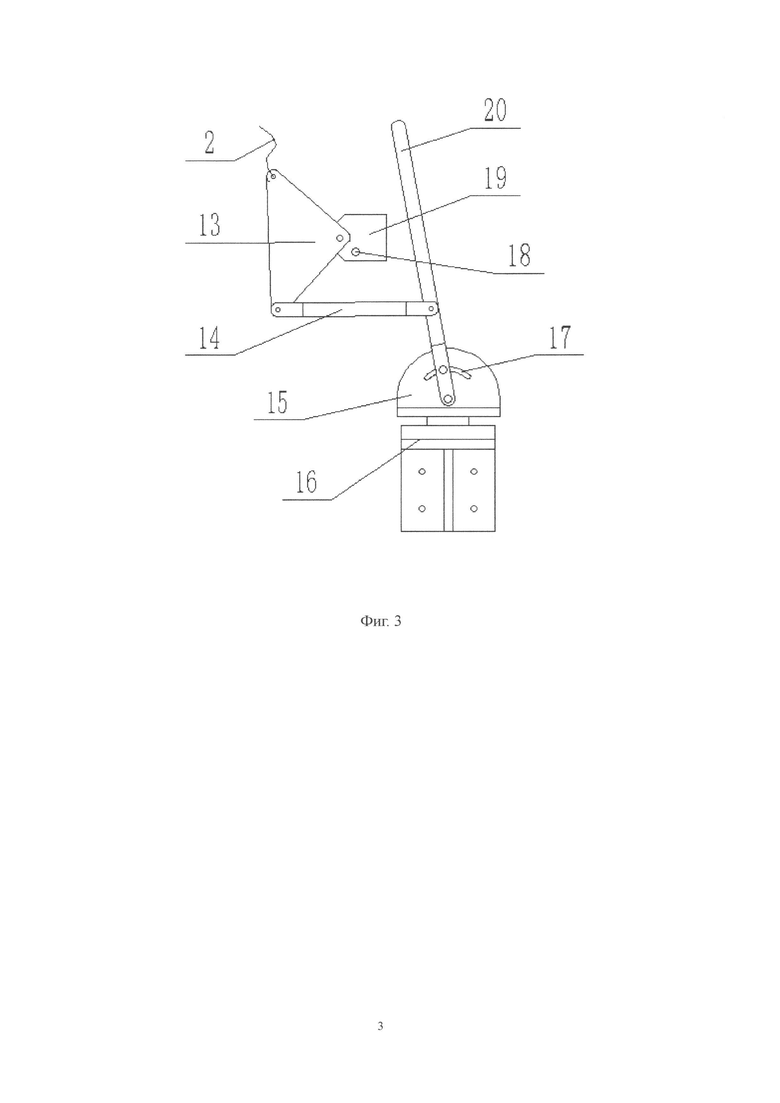
Фиг. 3 – схема конструкции приводного механизма;
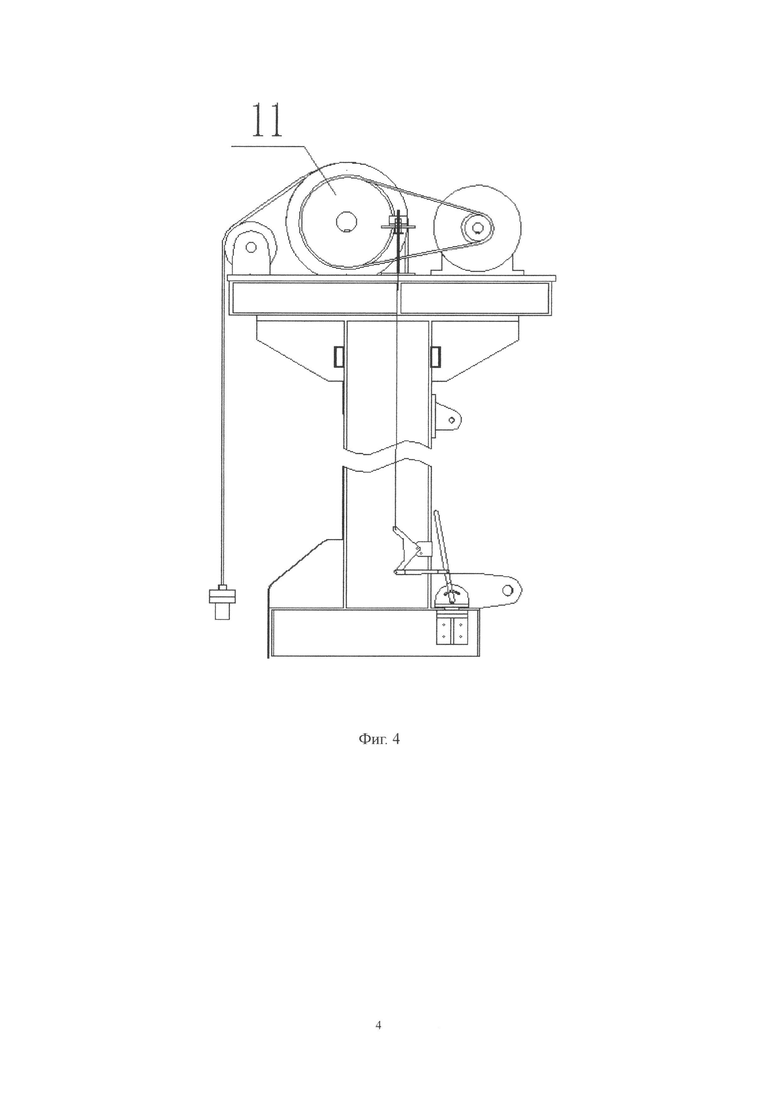
Фиг. 4 – схема конструкции для установки настоящем изобретение;
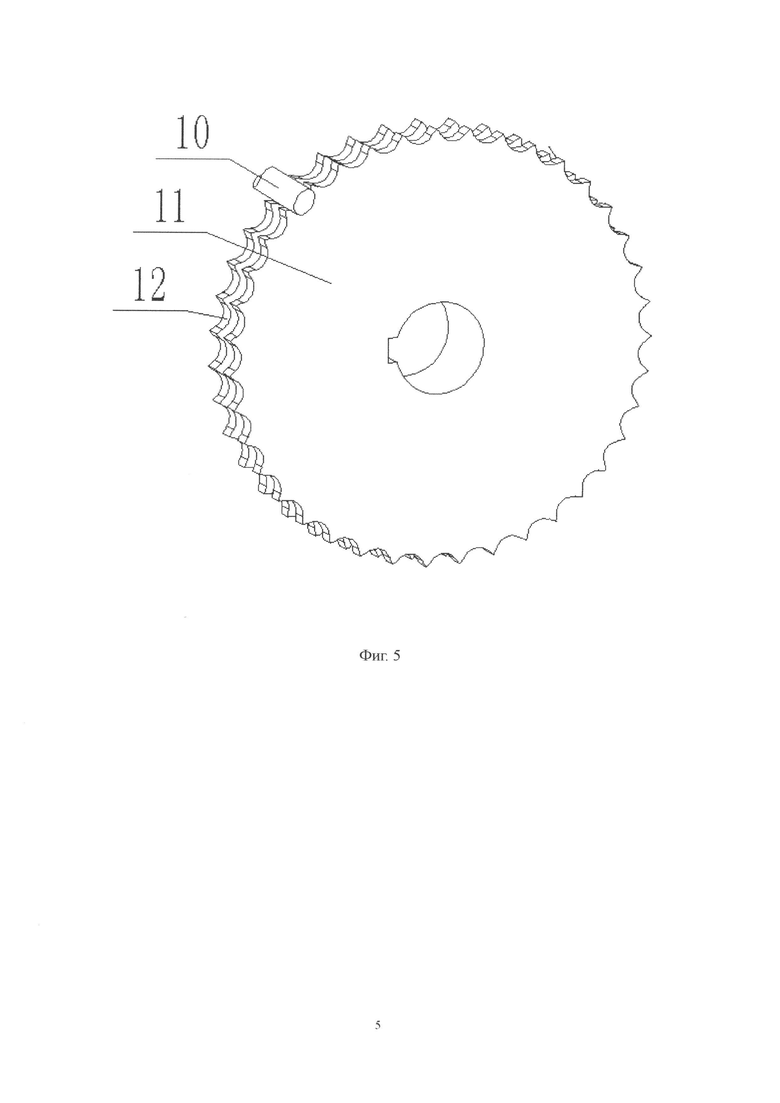
Фиг. 5 – схема согласования приводного шпинделя и главной ведущей звездочки.
На чертежах: 1 – приводной механизм, 2 – проволочный канат, 3 – исполнительный механизм, 4 – опора C, 5 – гнездо под пружину, 6 – верхний поворотный рычаг, 7 – пружина, 8 – затвор пружины, 9 – скользящая втулка, 10 – приводной шпиндель, 11 – главная ведущая звездочка, 12 – дуговая поверхность, 13 – нижний поворотный рычаг, 14 – соединительная тяга, 15 – полукруглый диск, 16 – опора A, 17 – дуговая направляющая, 18 – ограничивающая стойка, 19 – опора B, 20 – рукоять.
Описание варианта осуществления
Далее настоящее изобретение описано более подробно со ссылками на чертежи.
Вариант осуществления включает приводной механизм 1 и исполнительный механизм 3. Приводной механизм 1 установлен в нижней части станка-качалки, и исполнительный механизм 3 установлен на боковой стороне главной ведущей звездочки станка-качалки. Приводной механизм и исполнительный механизм соединены проволочным канатом 2. В настоящем изобретение приводной механизм 1 и исполнительный механизм 3 тормозной системы расположены по отдельности. Работа рукоятью 20 на уровне земли может управлять исполнительным механизмом 3 в высоком положении, чтобы осуществить задачу торможения. Нет необходимости взбираться на высоту для выполнения операции торможения, чем обеспечивается быстрота торможения и устраняется возможная опасность падения рабочего с высоты.
Приводной механизм 1 включает опору A 16, опору B 19, рукоять 20, полукруглый диск 15, соединительную тягу 14 и нижний поворотный рычаг 13. Опора A 16 и опора B 19 неподвижно установлены на станке-качалке, полукруглый диск 15 неподвижно установлен на опоре A 16, нижний поворотный рычаг 13 имеет форму прямоугольного треугольника, прямой угол которого шарнирно соединен с опорой B 19.
Дуговая направляющая 17 расположена на полукруглом диске 15, нижний конец рукояти 20 шарнирно соединен с центром полукруглого диска 15, ползун расположен на рукояти 20 в месте, соответствующем дуговой направляющей 17, причем ползун устанавливают в дуговую направляющую 17 и фиксируют на рукояти 20 одновременно. Расположение ползуна делает движение рукояти более стабильным и эффективно повышает сопротивление кручению и изгибу рукояти 20.
Один конец соединительной тяги 14 шарнирно соединен с рукоятью 20, другой ее конец шарнирно соединен с одним остроугольным концом нижнего поворотного рычага 13, и другой остроугольный конец нижнего поворотного рычага 13 соединен с нижним концом проволочного каната 2.
Исполнительный механизм 3 включает опору C 4, верхний поворотный рычаг 6, гнездо под пружину 5, приводной шпиндель 10 и скользящую втулку 9. Опора C 4 неподвижно установлена на верху станка-качалки, верхний поворотный рычаг 6 также имеет форму прямоугольного треугольника, прямой угол которого шарнирно соединен с опорой C 4, его один острый угол соединен с верхним концом проволочного каната 2, и его другой острый угол шарнирно соединен с одним концом приводного шпинделя 10. Гнездо под пружину 5 установлено с возможностью перемещения на верху опоры C 4, скользящая втулка 9 жестко установлена на верху опоры C 4, приводной шпиндель 10 входит между гнездом под пружину 5 и скользящую втулку 9.
A пружина 7 расположена на приводном шпинделе 10 между гнездом под пружину 5 и скользящую втулку 9. A затвор пружины 8 расположен неподвижно на приводном шпинделе 10, и пружина 7 ограничена между затвором пружины 8 и гнездо под пружину 5. Расположение пружины 7 позволяет приводному шпинделю 10 автоматически входить в указанное положение после снятия усилия с рукояти 20, чем достигается торможение.
Концевая часть приводного шпинделя 10 входит между двумя соседними зубьями главной ведущей звездочки 11 при торможении. Существуют очевидные различия между данным режимом торможения и уровнем техники. Режим торможения известной тормозной системы на станке-качалке заключается в осуществлении функции торможения путем блокировки вращающегося вала с наружной стороны. Тормозное усилие при торможении относительно невелико, и надежность торможения относительно невысокая. Настоящее изобретение осуществляет торможение посредством введения приводного шпинделя 10 между двумя зубьями главной ведущей звездочки 11. Надежность торможения значительно повышена по сравнению с известным уровнем техники.
Дуговая поверхность 12, которая соответствует приводному шпинделю 10, выполнена между двумя соседними зубьями главной ведущей звездочки 11. Дуговая поверхность 12 обеспечивает совпадение приводного шпинделя 10 с главной ведущей звездочкой 11 и перемещает точку приложения силы между приводным шпинделем 10 и главной ведущей звездочкой 11 ближе к основанию зубьев, этим повышая нагрузочную способность зубьев главной ведущей звездочки 11.
Ограничивающая стойка 18, которая расположена на нижней стороне точки шарнирного соединения опоры B 19 и нижнего поворотного рычага 13, расположена на опоре B 19. Это расположение ограничивающей стойки 18 ограничивает интервал поворота нижнего поворотного рычага 13. Когда нижний поворотный рычаг 13 доходит до предельного положения, это указывает, что приводной шпиндель 10 полностью вышел из двух зубьев главной ведущей звездочки 11, и это облегчает оператору точное согласование главной ведущей звездочки 11 и приводного шпинделя 10 для визуального контроля условий торможения.
Изобретение относится к системе ручного тормоза, используемого на безбалансирном станке-качалке, включает приводной механизм, установленный в нижней части станка-качалки, и исполнительный механизм, установленный на боковой стороне главной ведущей звездочки станка-качалки. Приводной механизм и исполнительный механизм соединены проволочным канатом. Приводной механизм и исполнительный механизм тормозной системы расположены по отдельности, чем обеспечивается быстрота торможения и устраняется возможная опасность падения рабочего с высоты. Режим торможения тормозной системы станка-качалки заключается в осуществлении функции торможения путем блокировки вращающегося вала с наружной стороны. Тормозное усилие при торможении относительно невелико и надежность торможения относительно невысокая. Торможение осуществляется путем введения приводного шпинделя между двумя зубьями главной ведущей звездочки. Надежность торможения значительно повышена по сравнению с известным уровнем техники. 2 з.п. ф-лы, 5 ил.
1. Система ручного тормоза, используемая на безбалансирном станке-качалке, включающая приводной механизм (1), исполнительный механизм (3) и главную ведущую звездочку (11), причем приводной механизм (1) установлен в нижней части станка-качалки, исполнительный механизм (3) установлен на боковой стороне главной ведущей звездочки (11) станка-качалки, приводной механизм (1) и исполнительный механизм (3) соединены проволочным канатом (2), приводной механизм (1) включает опору A (16), опору B (19), рукоять (20), полукруглый диск (15), соединительную тягу (14) и нижний поворотный рычаг (13), причем опора A (16) и опора B (19) неподвижно установлены на станке-качалке, полукруглый диск (15) неподвижно установлен на опоре A (16), нижний поворотный рычаг (13) имеет форму прямоугольного треугольника, прямой угол которого шарнирно соединен с опорой B (19), дуговая направляющая (17) расположена на полукруглом диске (15), нижний конец рукояти (20) шарнирно соединен с центром полукруглого диска (15), ползун расположен на рукояти (20) в месте, соответствующем дуговой направляющей (17), причем ползун устанавливают в дуговую направляющую (17) и фиксируют на рукояти (20) одновременно, один конец соединительной тяги (14) шарнирно соединен с рукоятью (20), а другой конец шарнирно соединен с одним остроугольным концом нижнего поворотного рычага (13), другой остроугольный конец нижнего поворотного рычага (13) соединен с нижним концом проволочного каната (2), исполнительный механизм (3) включает опору C (4), верхний поворотный рычаг (6), гнездо под пружину (5), приводной шпиндель (10) и скользящую втулку (9), опора C (4) жестко установлена наверху станка-качалки, верхний поворотный рычаг (6) также имеет форму прямоугольного треугольника, прямой угол которого шарнирно соединен с опорой C (4), один острый угол прямоугольного треугольника соединен с верхним концом проволочного каната (2) и его другой острый угол шарнирно соединен с одним концом приводного шпинделя (10), гнездо под пружину (5) установлено с возможностью перемещения наверху опоры C (4) и может быть зафиксировано крепежным болтом, скользящая втулка (9) жестко установлена наверху опоры C (4), приводной шпиндель (10) входит между гнездом под пружину (5) и скользящей втулкой (9), пружина (7) расположена на приводном шпинделе (10) между гнездом под пружину (5) и скользящей втулкой (9), затвор пружины (8) расположен неподвижно на приводном шпинделе (10), пружина (7) ограничена между затвором пружины (8) и гнездом под пружину (5), а концевая часть приводного шпинделя (10) входит между двумя соседними зубьями главной ведущей звездочки (11) при торможении.
2. Система ручного тормоза, используемая на безбалансирном станке-качалке, по п. 1, отличающаяся тем, что ограничивающая стойка (18), которая расположена на нижней стороне точки шарнирного соединения опоры B (19) и нижнего поворотного рычага (13), расположена на опоре B (19).
3. Система ручного тормоза, используемая на безбалансирном станке-качалке, по п. 1, отличающаяся тем, что дуговая поверхность (12), которая соответствует приводному шпинделю (10), выполнена между двумя соседними зубьями главной ведущей звездочки (11).
| CN 102635655 A, 15.08.2012 | |||
| CN 103089859 A, 08.05.2013 | |||
| CN 202023541 U, 02.11.2011 | |||
| CN 201884004 U, 29.06.2011 | |||
| CN 205577953 U, 14.09.2016 | |||
| ПРИВОД ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2013 |
|
RU2534636C1 |

