Заявленная группа решений относится к области сельского хозяйства и дистанционного зондирования земли, в частности, для измерения индекса плотности растительности на основании обработки получаемых изображений съемки сельскохозяйственных культур.
УРОВЕНЬ ТЕХНИКИ
На сегодняшний день для получения изображений сельскохозяйственных культур для расчета индекса плотности растений применяются достаточно сложные оптические системы, которые не используют внешних систем спектральной фильтрации цветовых каналов, что приводит к достаточно сложной и долгой обработки получаемых данных, увеличению веса таких оптических систем, что негативно влияет на использование таких систем на борту беспилотных летательных аппаратов.
Известна камера, производимая компанией SlantRange (http://www.slantrange.com/), которая представляет собой классическую систему сбора фото/видео информации, представляющая собой отдельно монтируемую подвесную оптическую систему, которая, помимо технической сложности, не имеет связи синхронизации получаемых данных с системой геолокации летательного аппарата. Помимо применения специальных светофильтров на данной оптической подвесной системе, используется система, состоящая из 4х параллельных оптических систем, ведущих независимый процесс сбора информации. Данная система ненадежна (в силу повышения риска общего отказа из отказа хотя бы одной оптической системы), неуправляемая бортовыми системами летательного аппарата и как следствие имеет пониженную точность привязки индекса плотности растительности, в частности NDVI, к геокоординатам (используя только оптические методы геолокации), к тому же факт отсутствия управления влияет на угол обзора, увеличивая конечное время сбора информации и его обработку. Важным негативным эффектом является увеличение массы аппарата, что влечет за собой снижение времени полета при фиксированной массе аппарата.
Известен способ прогнозирования урожайности зерновых культур на основе данных космического мониторинга и моделирования биопродуктивности (патент RU 2379879, 27.01.2010), который заключается в том, что рассчитывают параметры культуры, используя модель биопродуктивности EPIC и ежедневные метеорологические данные. Для расчета параметров культуры модифицируют блок входных данных по солнечной радиации в модели EPIC путем использования ежедневно определяемых данных метеостанций и данных дистанционного зондирования, по которым вычисляют нормализованный вегетационный и листовой индексы. При этом листовой индекс LAI вычисляют по спутниковому изображению для изучаемой территории. Затем осуществляют коррекцию листового индекса LAI по космическим снимкам или данным наземных наблюдений на определенные даты развития растений до достижения листового индекса LAI максимального значения. Максимальную температуру почвы определяют по суммарной коротковолновой солнечной радиации, а минимальную - по эффективному излучению атмосферы. Осуществляют оценку приходящей к посеву коротковолновой радиации по влажности воздуха, измеряемой на метеостанциях. По регрессионным уравнениям рассчитывают параметры растений: биомассу, листовой индекс, высоту растений, вес корня и по этим параметрам биопродуктивности осуществляют мониторинг состояния зерновых культур во времени от момента посева до сбора.
Недостатком данного способа является сложная обработка информации для получения индекса плотности растений, в частности, вегетативного индекса, а также применения беспилотных летательных аппаратов, содержащих оптическую систему.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Технической проблемой, решаемой с помощью заявленного решения, является модернизация оптической системы летательного аппарата для фильтрации цветовых спектров получаемых изображений сельскохозяйственных структур.
Технически результатом является сокращение времени расчета индекса плотности растительности с сохранением высокого уровня точности измерений, за счет модернизации оптической системы в части фильтрации получаемых цветовых каналов изображений.
Данная модернизация, в частности, позволяет рассчитать индекс плотности растительности за единичный пролет летательного аппарата над зоной анализа. Также, дополнительным положительным эффектом является сокращение массы оптической системы, что приводит к увеличению времени полета летательного аппарата.
Заявленный технический результат достигается за счет способа измерения индекса плотности растительности с помощью устройства фиксации изображения, расположенного на летательном аппарате, причем устройство фиксации изображения содержит систему спектральных фильтров, содержащий этапы, на которых:
- получают данные изображения объекта съемки в RGB диапазоне;
- выполняют обработку полученных данных с помощью системы фильтрации, при которой в красном канале (R) полученных изображений оцифровывают ближний инфракрасный диапазон (NIR), а данные изображения в зеленом (G) и синим каналах (В) оставляют неизменным, или удаляют изображение в G канале;
- фиксируют с помощью навигационного устройства летательного аппарата его геолокационные координаты в момент получения изображений объекта съемки;
- присваивают полученным изображениям координаты, синхронизированные по времени получения кадра изображения с текущей координатой летательного аппарата;
- выполняют расчет по меньшей мере одного индекса плотности растительности как разницу интенсивностей отраженного света в видимом и инфракрасном диапазоне, деленную на сумму их интенсивностей;
- формируют общую карту полученного индекса на основе обработанных изображений объекта съемки.
В частном варианте реализации способа устройство фиксации изображения представляет собой фотокамеру или видеокамеру.
В частном варианте реализации способа летательный аппарат представляет собой беспилотный летательный аппарат.
В частном варианте реализации способа система фильтрации выбирается из группы: внешний светофильтр, устанавливаемый на оптику устройства фиксации изображения, покрытие, наносимое на оптику объектива устройства фиксации изображений.
В частном варианте реализации способа внешние светофильтры представляют собой поглощающие или отражающие светофильтры.
В частном варианте реализации способа светофильтры выполняются в виде сменного объектива камеры.
В частном варианте реализации способа данные изображений, получаемые с устройства фиксации изображений, представляют собой отраженный сигнал от листьев растений.
В частном варианте реализации способа индекс плотности растительности выбирается из группы:
- NDVI (Normalized Difference Vegetation Index), рассчитываемый по формуле NDVI=(NIR - Blue) / (NIR+Blue);
- GNDVI (Green Normalized Difference Vegetation Index), рассчитываемый по формуле GNDV=(NIR - Green) / (NIR+Green); где
NIR - ближний инфракрасный диапазон;
Green - видимый спектр в зеленом диапазоне излучения;
Blue - видимый спектр в синем диапазоне излучения.
Заявленный технический результат также достигается за счет системы измерения индекса плотности растительности, которая содержит:
- летательный аппарат, на котором установлены вычислительный блок, средство хранения данных, устройство фиксации изображений, система спектральных фильтров, навигационное устройство, аккумулятор;
- причем устройство фиксации изображения выполнено с возможностью получения данных изображения объекта съемки в RGB диапазоне;
- вычислительный блок выполнен с возможностью обработки полученных данных изображений с помощью системы фильтрации, в ходе которой в красном канале (R) полученных изображений оцифровывают ближний инфракрасный диапазон (NIR), а данные изображения в зеленом (G) и синим каналах (В) оставляют неизменным, или удаляют изображение в G канале;
- навигационное устройство выполнено с возможностью фиксации геолокационных координат летательного аппарата в момент получения изображений объекта съемки и передавать данные координат в вычислительный блок, в котором
- выполняют присваивание полученным изображениям координаты, синхронизированные по времени получения кадра изображения с текущей координатой летательного аппарата;
- выполняют расчет по меньшей мере одного индекса плотности растительности как разницу интенсивностей отраженного света в видимом и инфракрасном диапазоне, деленной на сумму их интенсивностей;
- формируют общую карту полученного индекса на основе обработанных изображений объекта съемки.
В частном варианте реализации системы устройство фиксации изображения представляет собой фотокамеру или видеокамеру.
В частном варианте реализации системы летательный аппарат представляет собой беспилотный летательный аппарат.
В частном варианте реализации системы система фильтрации выбирается из группы: внешний светофильтр, устанавливаемый на оптику устройства фиксации изображения, покрытие, наносимое на оптику объектива устройства фиксации изображений.
В частном варианте реализации системы внешние светофильтры представляют собой поглощающие или отражающие светофильтры.
В частном варианте реализации системы светофильтры выполняются в виде сменного объектива камеры.
В частном варианте реализации системы данные изображений, получаемые с устройства фиксации изображений, представляют собой отраженный сигнал от листьев растений.
В частном варианте реализации системы индекс плотности растительности выбирается из группы:
- NDVI (Normalized Difference Vegetation Index), рассчитываемый по формуле NDVI=(NIR - Blue) / (NIR+Blue);
- GNDVI (Green Normalized Difference Vegetation Index), рассчитываемый по формуле GNDV=(NIR - Green) / (NIR+Green); где
NIR - ближний инфракрасный диапазон;
Green - видимый спектр в зеленом диапазоне излучения;
Blue - видимый спектр в синем диапазоне излучения.
В частном варианте реализации системы вычислительный блок содержит один или более процессор, или микроконтроллер.
В частном варианте реализации системы навигационное устройство представляет собой приемник, работающий по меньшей мере в одном диапазоне, выбираемом из группы: GPS, ГЛОНАСС, BeiDou, Magellan.
В частном варианте реализации системы навигационное устройство дополнительно включает в себя бортовую систему навигации летательного аппарата, содержащую MEMS барометр и/или MEMS гироскоп, и/или MEMS акселерометр, и/или MEMS магнитометр, и/или систему оптической навигации, и/или ультразвуковые датчики расстояния.
В частном варианте реализации системы навигационное устройство уточняет координату геолокации с помощью показаний бортовой системы навигации.
В частном варианте реализации системы используются одновременно все методы подсчета индекса плотности растительности по меньшей мере с помощью способа вычисления среднего арифметического показания индекса.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует общий вид заявленной системы.
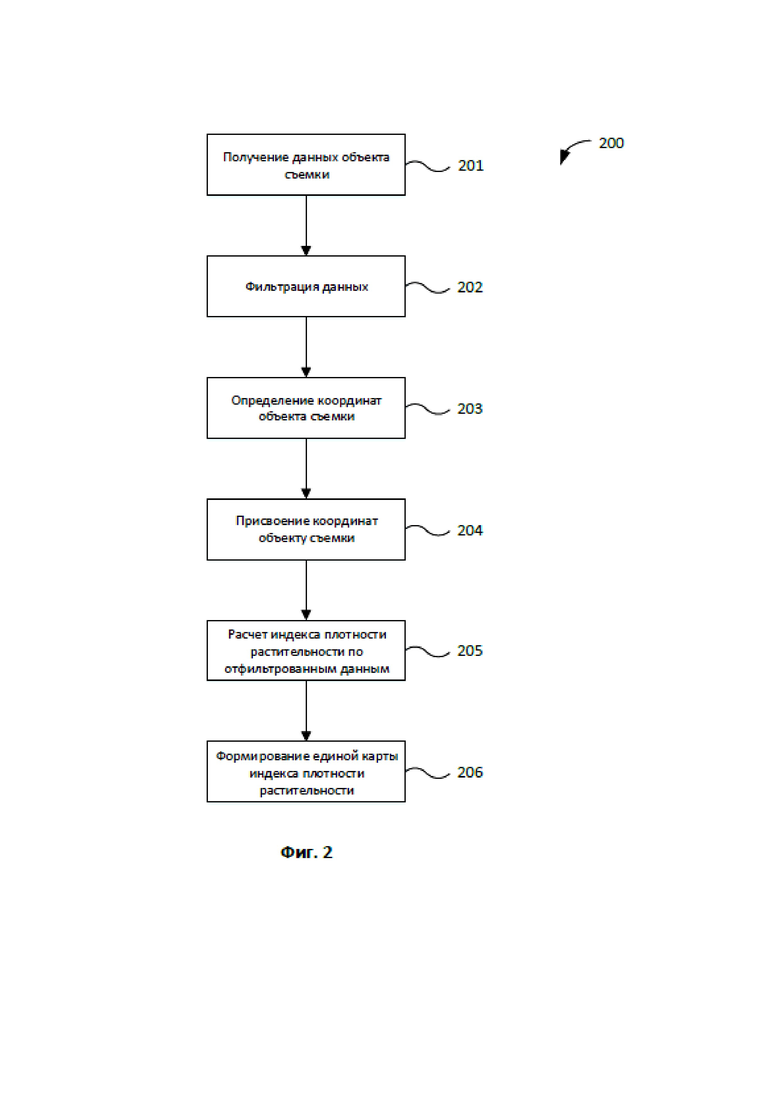
Фиг. 2 иллюстрирует этапы выполнения заявленного способа.
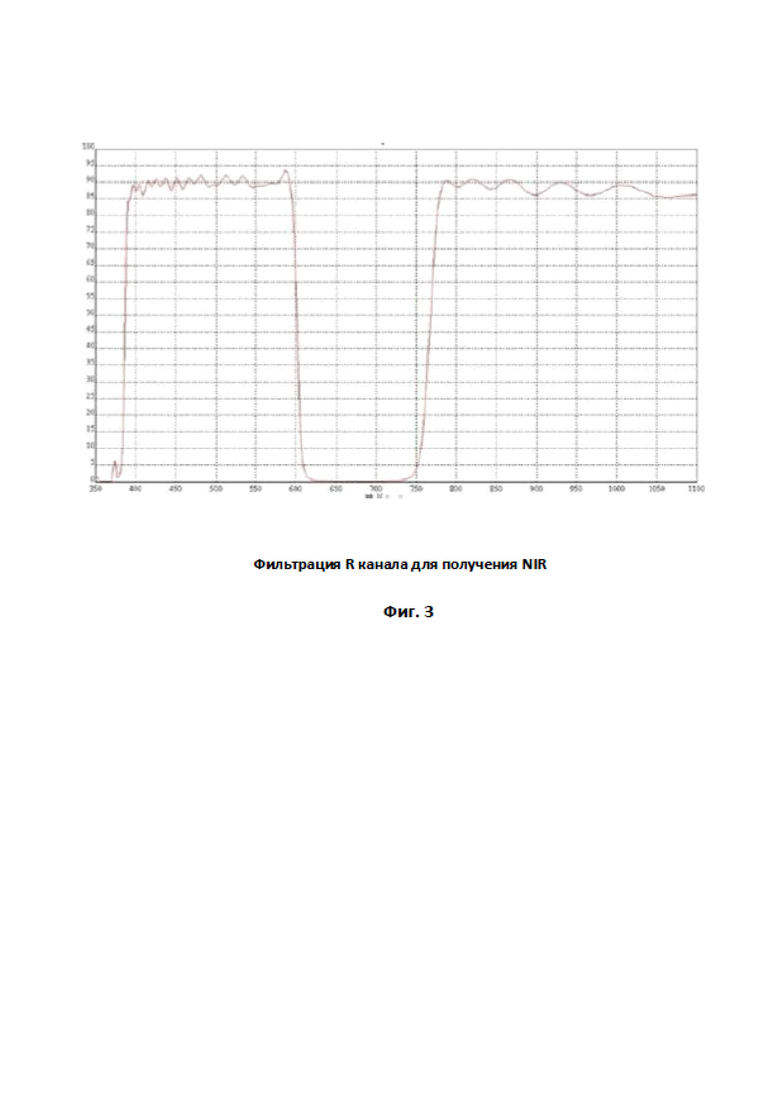
Фиг. 3 иллюстрирует пример работы избирательного фильтра, удаляющего красный спектр полученного сигнала изображения от объекта съемки.
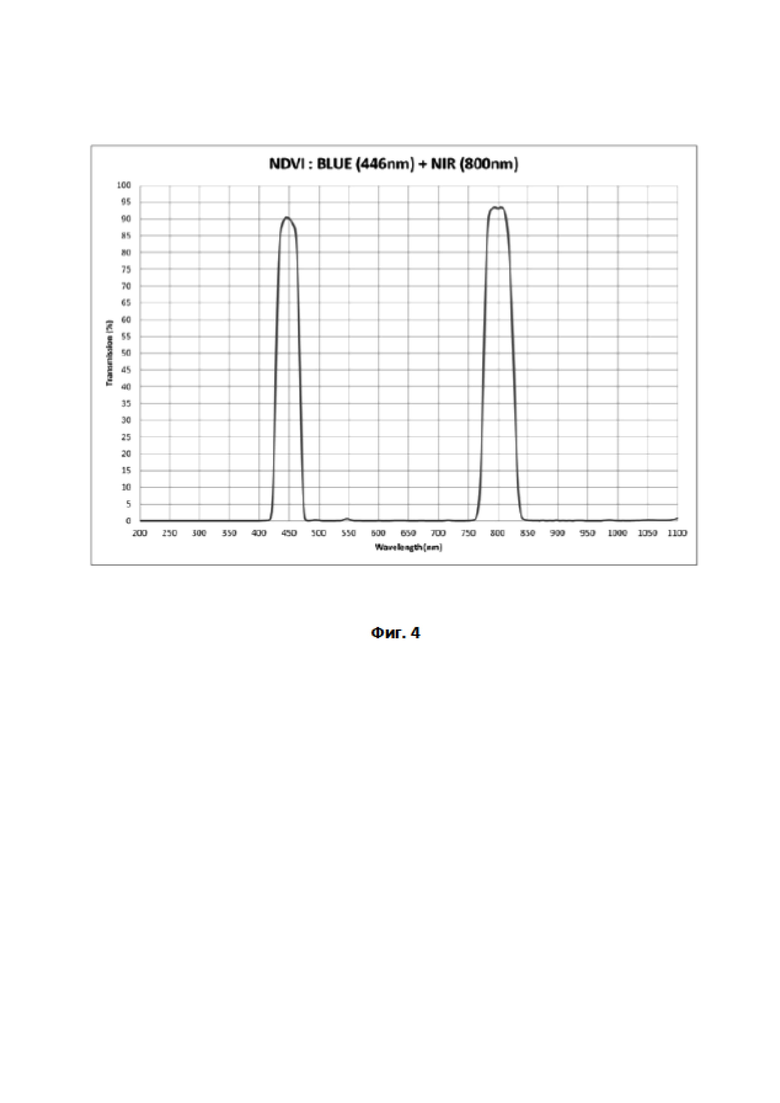
Фиг. 4 иллюстрирует пример работы упрощенного фильтра для получения спектров в NIR и В каналах.
Фиг. 5 иллюстрирует принцип измерения индекса плотности растительности.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 представлен общий вид системы (100) выполняющей, заявленный способ измерения индекса плотности растительности.
Согласно Фиг. 1 заявленный способ измерения индекса плотности растительности заключается в обработке данных, получаемых с помощью оптической системы, установленной на борту летательного аппарата. В частности, под оптической системой понимается любое устройство фиксации фото/виде изображений (103), например, фотокамера или видеокамера.
Для осуществления процесса вычислительной обработки на летательный аппарат, в частности, беспилотный летательный аппарат содержит вычислительный блок (101) и средство хранения данных (102).
Вычислительный блок (101) может включать в себя один или более процессоров, или один или более микроконтроллеров. Данные, поступающие от устройства фиксации изображения (103) передаются по общей шине данных в средство хранения данных (102), которые может представлять собой, но не ограничиваясь, жесткий диск (HDD), твердотельный накопитель информации (SSD), флэш память (EEPROM) постоянного и/или непостоянного типа хранения данных, карту памяти (Secure Digital типа) и т.п.. Средство хранения данных (102) может также выполняться в виде комбинации средств ОЗУ и ПЗУ.
Для реализации заявленного технического решения выполняется модификация устройства фиксации изображения (103), для чего оно снабжается системой спектральных фильтров (104), позволяющей получать мультиспектральный диапазон измерений, в котором в красном канале измерений (R канал) оцифровывается только ближний инфракрасный диапазон (NIR), а синий Blue (В) и зеленый Green (G) каналы остаются без изменений или с полным удалением G диапазона, с сохранением только Blue канала длин волн, что является минимальным требованием к измерению индекса плотности растительности, например, NDVI, без потери точности.
Система спектральных фильтров (104) может выполняться в виде сменного объектива для устройства фиксации изображения (103), либо выполняться в виде внешнего светофильтра (поглощающего или отражающего типа) устанавливаемого на оптику устройства фиксации изображения. Система (104) также может быть реализована в виде покрытия, наносимого на оптику объектива устройства фиксации изображений. Допускается применение интерференционных фильтров, а также фильтров, монтируемых в виде отдельного звена (линза, пленка) внутри объектива.
Сигнал съемки, полученный об объекте, представляет собой отраженный сигнал в RGB диапазоне от листьев растений. Полученный данные съемки растительности отфильтровываются по необходимым каналам цветового спектра и обрабатываются вычислительным блоком (101) для привязки к каждому снимку геолокационных координат. Координаты определяются с помощью навигационного устройства (105), установленного на борту летательного аппарата, который может выполняться в виде приемника спутниковых координат в таких диапазонах, как: GPS, ГЛОНАСС, BeiDou, Magellan или их сочетания.
Дополнительно летательный аппарат может содержать бортовую систему навигации, которая может включать одно или более из таких устройств, как: MEMS барометр, MEMS гироскоп, MEMS акселерометр, MEMS магнитометр, систему оптической навигации, ультразвуковые датчики расстояния.
Полученные геолокационные координаты с помощью вычислительного блока (101) присваиваются полученным изображениям объекта съемки, синхронизированным по времени получения кадра изображения с текущей координатой летательного аппарата. Эти данные синхронизированы с точки зрения времени измерения геокоординаты с временем получения очередного фотокадра и объединены в цифровой файл, сохраняющийся на цифровом носителе информации на борту летательного аппарата.
Также, вычислительный блок (101) выполняет расчет по меньшей мере одного индекса плотности растительности как разницу интенсивностей отраженного света в видимом и инфракрасном диапазоне, деленной на сумму их интенсивностей. Далее по полученным расчетам формируется общая карта полученного индекса плотности растительности на основе обработанных изображений объекта съемки и ее сохранение в средстве хранения данных (102) летательного аппарата.
На Фиг. 2 представлены основные этапы выполняемого способа вычисления индекса плотности растительности (200). На первом этапе (201) выполняется съемка сельскохозяйственных культур и получение данных объекта съемки. Далее полученные данные обрабатываются с помощью системы фильтрации (202) с оцифровыванием R канала для получения NIR диапазона спектра изображения (800 нм) и видимого спектра диапазона 450-550 нм (B/G или В) (Фиг. 3 и Фиг. 4). На этапе (203) фиксируются текущие координаты летательного аппарата в момент съемки каждого изображения, время съемки, и на основании полученной информации выполняется присвоение времени и координаты каждому снимку (этап 204).
По полученному набору изображений, отфильтрованным в заданном диапазоне спектра, выполняется вычисление индекса плотности растительности (этап 205) и последующее формирование общей карты индекса (этап 206).
С помощью применяемой фильтрации изображения в NIR диапазоне заявленный способ позволяет вычислять следующие индексы плотности растительности:
- NDVI (Normalized Difference Vegetation Index), рассчитываемый по формуле NDVI=(NIR - Blue) / (NIR+Blue);
- GNDVI (Green Normalized Difference Vegetation Index), рассчитываемый по формуле GNDV=(NIR - Green) / (NIR+Green).
Вышеуказанные индексы могут вычисляться как отдельно в зависимости от заложенного алгоритма обработки вычислительного блока (101), либо несколько их них, либо все одновременно. Возможно также вычисление общего индекса плотности растительности с помощью вычисления среднего арифметического значения на основании вычисления всех вышеупомянутых индексов.
Плотность растительности (NDVI) в определенной точке изображения равна разнице интенсивностей отраженного света в видимом и инфракрасном диапазоне, деленной на сумму их интенсивностей. Расчет NDVI базируется на двух наиболее стабильных (не зависящих от прочих факторов) участках спектральной кривой отражения сосудистых растений. В видимой области спектра (диапазон длин волн 0,4-0,7 мкм) лежит максимум поглощения солнечной радиации хлорофиллом высших сосудистых растений, а в инфракрасной области (0,7-1,0 мкм) находится область максимального отражения клеточных структур листа. Высокая фотосинтетическая активность (связанная, как правило, с густой растительностью) ведет к меньшему отражению в видимой области спектра и большему в инфракрасной (Фиг. 5). Отношение этих показателей друг к другу позволяет четко отделять и анализировать растительные объекты от прочих природных объектов. Использование же не простого отношения, а нормализованной разности между минимумом и максимумом отражений увеличивает точность измерения, позволяет уменьшить влияние таких явлений как различия в освещенности снимка, облачности, дымки, поглощение радиации атмосферой и пр.
Представленные примеры реализации в настоящих материалах заявки являются предпочтительными и не должны трактоваться как ограничивающие иные. частные реализации заявленного технического решения, не выходящие за пределы испрашиваемого объема правовой охраны, которые являются очевидными для специалиста данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выявления стадии восстановления растительных покровов посредством анализа температурных аномалий на спутниковой съемке подстилающей поверхности в тепловом ИК диапазоне спектра | 2021 |
|
RU2754968C1 |
| Способ дистанционного определения антропогенной трансформации фитоценозов в полосе отвода путей транспорта и линий электропередачи | 2018 |
|
RU2694220C1 |
| Устройство мониторинга живой растительности и визуализации характеристик активности фотосинтеза | 2023 |
|
RU2814160C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ РАСПРОСТРАНЕНИЯ ПРИРОДНЫХ ПОЖАРОВ С ПОМОЩЬЮ ДАННЫХ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ И НЕЙРОННЫХ СЕТЕЙ | 2022 |
|
RU2813124C1 |
| Способ определения параметров лесного массива | 2024 |
|
RU2828596C1 |
| Способ классификации нарушенности растительности и напочвенного покрова на основе динамики аномалии теплового фона в летний период по спутниковым измерениям в инфракрасном диапазоне | 2022 |
|
RU2789989C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОГО ПРОГНОЗИРОВАНИЯ ВЕРОЯТНОСТИ ВОЗНИКНОВЕНИЯ ПРИРОДНЫХ ПОЖАРОВ | 2023 |
|
RU2832688C1 |
| МЕТОДИКА ДИСТАНЦИОННОЙ РЕКОГНОСЦИРОВОЧНОЙ ДИАГНОСТИКИ ОБЕСПЕЧЕНИЯ РАСТЕНИЙ АЗОТОМ (С ПОМОЩЬЮ МУЛЬТИСПЕКТРАЛЬНОЙ КАМЕРЫ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ) | 2018 |
|
RU2693255C1 |
| Система мониторинга лесопользования и лесопатологических изменений | 2019 |
|
RU2716477C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ДИНАМИКИ ПИРОГЕННЫХ СУКЦЕССИЙ РАСТИТЕЛЬНОСТИ | 2021 |
|
RU2814455C2 |


Группа изобретений относится к области сельского хозяйства и дистанционного зондирования земли. Способ измерения индекса плотности растительности реализуется с помощью устройства фиксации изображения, расположенного на летательном аппарате, причем устройство фиксации изображения содержит систему спектральных фильтров и заключается в том, что получают данные изображения объекта съемки в RGB-диапазоне, проводят обработку полученных данных с помощью системы фильтрации, при которой в красном канале (R) полученных изображений оцифровывают ближний инфракрасный диапазон (NIR), а данные изображения в зеленом (G) и синим каналах (B) оставляют неизменным или удаляют изображение в G канале. Фиксируют с помощью навигационного устройства летательного аппарата его геолокационные координаты в момент получения изображений объекта съемки, полученным изображениям присваивают координаты, синхронизированные по времени получения кадра изображения с текущей координатой летательного аппарата. Выполняют расчет по меньшей мере одного индекса плотности растительности как разницу интенсивностей отраженного света в видимом и инфракрасном диапазоне, деленной на сумму их интенсивностей, формируют общую карту полученного индекса на основе обработанных изображений объекта съемки. Технический результат заключается в сокращении времени расчета индекса плотности растительности с сохранением высокого уровня точности измерений. 2 н. и 19 з.п. ф-лы, 5 ил.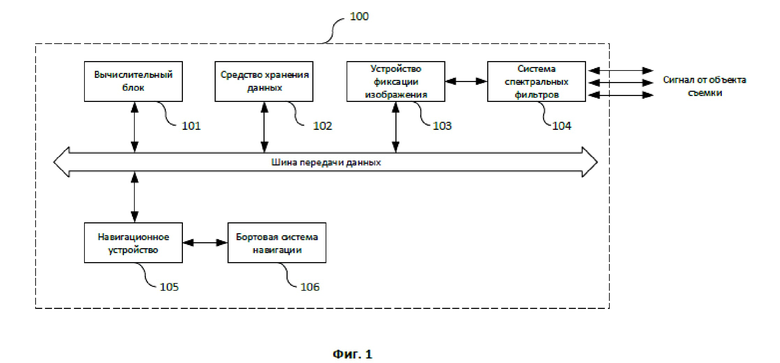
1. Способ измерения индекса плотности растительности с помощью устройства фиксации изображения, расположенного на летательном аппарате, причем устройство фиксации изображения содержит систему спектральных фильтров, содержащий этапы, на которых:
- получают данные изображения объекта съемки в RGB-диапазоне;
- выполняют обработку полученных данных с помощью системы фильтрации, при которой в красном канале (R) полученных изображений оцифровывают ближний инфракрасный диапазон (NIR), а данные изображения в зеленом (G) и синим каналах (В) оставляют неизменным, или удаляют изображение в G канале;
- фиксируют с помощью навигационного устройства летательного аппарата его геолокационные координаты в момент получения изображений объекта съемки;
- присваивают полученным изображениям координаты, синхронизированные по времени получения кадра изображения с текущей координатой летательного аппарата;
- выполняют расчет по меньшей мере одного индекса плотности растительности как разницу интенсивностей отраженного света в видимом и инфракрасном диапазоне, деленную на сумму их интенсивностей;
- формируют общую карту полученного индекса на основе обработанных изображений объекта съемки.
2. Способ по п. 1, характеризующийся тем, что устройство фиксации изображения представляет собой фотокамеру или видеокамеру.
3. Способ по п. 1, характеризующийся тем, что летательный аппарат представляет собой беспилотный летательный аппарат.
4. Способ по п. 1, характеризующийся тем, что система фильтрации выбирается из группы: внешний светофильтр, устанавливаемый на оптику устройства фиксации изображения, покрытие, наносимое на оптику объектива устройства фиксации изображений.
5. Способ по п. 1, характеризующийся тем, что внешние светофильтры представляют собой поглощающие или отражающие светофильтры.
6. Способ по п. 5, характеризующийся тем, что светофильтры выполняются в виде сменного объектива камеры.
7. Способ по п. 1, характеризующийся тем, что данные изображений, получаемые с устройства фиксации изображений, представляют собой отраженный сигнал от листьев растений.
8. Способ по п. 1, характеризующийся тем, что индекс плотности растительности выбирается из группы:
- NDVI (Normalized Difference Vegetation Index), рассчитываемый по формуле NDVI=(NIR - Blue) / (NIR+Blue);
- GNDVI (Green Normalized Difference Vegetation Index), рассчитываемый по формуле GNDV=(NIR - Green) / (NIR+Green);
где
NIR - ближний инфракрасный диапазон; Green - видимый спектр в зеленом диапазоне излучения;
Blue - видимый спектр в синем диапазоне излучения.
9. Система измерения индекса плотности растительности, содержащая:
- летательный аппарат, на котором установлены вычислительный блок, средство хранения данных, устройство фиксации изображений, система спектральных фильтров, навигационное устройство, аккумулятор;
- причем устройство фиксации изображения выполнено с возможностью получения данных изображения объекта съемки в RGB-диапазоне;
- вычислительный блок выполнен с возможностью обработки полученных данных изображений с помощью системы фильтрации, в ходе которой в красном канале (R) полученных изображений оцифровывают ближний инфракрасный диапазон (NIR), а данные изображения в зеленом (G) и синим каналах (В) оставляют неизменным или удаляют изображение в G канале;
- навигационное устройство выполнено с возможностью фиксации геолокационных координат летательного аппарата в момент получения изображений объекта съемки и передавать данные координат в вычислительный блок, в котором
- выполняют присваивание полученным изображениям координаты, синхронизированные по времени получения кадра изображения с текущей координатой летательного аппарата;
- выполняют расчет по меньшей мере одного индекса плотности растительности как разницу интенсивностей отраженного света в видимом и инфракрасном диапазоне, деленную на сумму их интенсивностей;
- формируют общую карту полученного индекса на основе обработанных изображений объекта съемки.
10. Система по п. 9, характеризующаяся тем, что устройство фиксации изображения представляет собой фотокамеру или видеокамеру.
11. Система по п. 9, характеризующаяся тем, что летательный аппарат представляет собой беспилотный летательный аппарат.
12. Система по п. 9, характеризующаяся тем, что система фильтрации выбирается из группы: внешний светофильтр, устанавливаемый на оптику устройства фиксации изображения, покрытие, наносимое на оптику объектива устройства фиксации изображений.
13. Система по п. 9, характеризующаяся тем, что внешние светофильтры представляют собой поглощающие или отражающие светофильтры.
14. Система по п. 13, характеризующаяся тем, что светофильтры выполняются в виде сменного объектива камеры.
15. Система по п. 9, характеризующаяся тем, что данные изображений, получаемые с устройства фиксации изображений, представляют собой отраженный сигнал от листьев растений.
16. Система по п. 9, характеризующаяся тем, что индекс плотности растительности выбирается из группы:
- NDVI (Normalized Difference Vegetation Index), рассчитываемый по формуле NDVI=(NIR - Blue) / (NIR+Blue);
- GNDVI (Green Normalized Difference Vegetation Index), рассчитываемый по формуле GNDV=(NIR - Green) / (NIR+Green);
где
NIR - ближний инфракрасный диапазон;
Green - видимый спектр в зеленом диапазоне излучения;
Blue - видимый спектр в синем диапазоне излучения.
17. Система по п. 9, характеризующаяся тем, что вычислительный блок содержит один или более процессоров или микроконтроллер.
18. Система по п. 9, характеризующаяся тем, что навигационное устройство представляет собой приемник, работающий по меньшей мере в одном диапазоне, выбираемом из группы: GPS, ГЛОНАСС, BeiDou, Magellan.
19. Система по п. 18, характеризующаяся тем, что навигационное устройство дополнительно включает в себя бортовую систему навигации летательного аппарата, содержащую MEMS барометр и/или MEMS гироскоп, и/или MEMS акселерометр, и/или MEMS магнитометр, и/или систему оптической навигации, и/или ультразвуковые датчики расстояния.
20. Система по п. 19, характеризующаяся тем, что навигационное устройство уточняет координату геолокации с помощью показаний бортовой системы навигации.
21. Система по п. 16, характеризующаяся тем, что используются одновременно все методы подсчета индекса плотности растительности по меньшей мере с помощью способа вычисления среднего арифметического показания индекса.
| Воробьёва А.А | |||
| "Дистанционное зондирование Земли", СПб, 2012, всего - 168 стр. | |||
| CN 102609726 A, 25.07.2012 | |||
| CN 102679958 A, 19.09.2012 | |||
| СПОСОБ МОНИТОРИНГА ЛЕСОВ | 2012 |
|
RU2489845C1 |

