Техническое решение относится к вычислительной технике, а именно к технологии определения параметров лесного массива посредством осуществления его предварительной съемки с беспилотных летательных аппаратов.
Известен способ измерения индекса плотности растительности с помощью устройства фиксации изображения, расположенного на летательном аппарате, причем устройство фиксации изображения содержит систему спектральных фильтров, содержащий этапы, на которых получают данные изображения объекта съемки в RGB-диапазоне; выполняют обработку полученных данных с помощью системы фильтрации, при которой в красном канале (R) полученных изображений оцифровывают ближний инфракрасный диапазон (NIR), а данные изображения в зеленом (G) и синем каналах (В) оставляют неизменным, или удаляют изображение в G канале; фиксируют с помощью навигационного устройства летательного аппарата его геолокационные координаты в момент получения изображений объекта съемки; присваивают полученным изображениям координаты, синхронизированные по времени получения кадра изображения с текущей координатой летательного аппарата; выполняют расчет по меньшей мере одного индекса плотности растительности как разницу интенсивностей отраженного света в видимом и инфракрасном диапазоне, деленную на сумму их интенсивностей; формируют общую карту полученного индекса на основе обработанных изображений объекта съемки. Патент в РФ №2662019, опубликован 23.07.2018.
Известен способ определения таксационных характеристик лесов на основе машинного обучения с использованием результатов дистанционного зондирования, при котором готовят данные дистанционного зондирования и существующие исходные данные лесной инвентаризации. Данные дистанционного зондирования представляют собой мультиспектральную спутниковую информацию и ее производные, а также цифровую модель рельефа и ее производные. Подготовленные данные обрабатывают с использованием машинного обучения, осуществленного на базе исходных данных лесной инвентаризации, при этом дистанционное зондирование проводят неоднократно с периодами наблюдения, охватывающими различные состояния кроны растительности, а также с учетом пространственных данных, содержащихся в исторических данных лесной идентификации и тематических картах. Патент в РФ №2739436, опубликован 24.12.2020.
Известен способ определения запасов стволовой древесины с использованием данных воздушной беспилотной съемки, включающий выполнение фотоснимков заранее выбранного однородного участка леса беспилотным летательным аппаратом (БПЛА) с высоты не более 50 м с перекрытием фотографируемой площади соседних фотоснимков не менее 80%, с последующим сохранением фотоснимков для формирования банка данных, содержащего в отношении каждого снимка сведения об условиях съемки, размере изображений и координатах центральных точек каждого снимка; обработку фотоснимков с последующим построением цифровой модели древесного полога, для чего выполняют:
фотограмметрическую обработку снимков с БПЛА с построением плотного облака точек, классификацию точек по их положению в пространстве с выделением точек, принадлежащих к земной поверхности, формированием из них цифровой модели рельефа (ЦМР) и формированием цифровой модели местности (ЦММ) из остальных точек, формирование цифровой модели древесного полога посредством вычитания ЦМР из ЦММ, преобразование полученной цифровой модели для извлечения контуров крон деревьев с последующим их визуальным дешифрированием, фильтрацию полученной цифровой модели с определением количества стволов, их высот и породного состава участка леса. Патент в РФ № 2773144, опубликован 31.05.2022.
Технический результат заявляемого технического решения заключается в автоматизации процесса определения параметров лесного массива, таких как породный состав и другие характеристики, включающие оценку запаса древесины, а также в повышении точности их определения по данным АФС.
Заявленный технический результат достигается способом определения параметров лесного массива, при котором осуществляют съемку участка леса с беспилотного воздушного судна посредством мультиспектральной камеры с не менее, чем четырьмя каналами и цифровой RGB-камерой с последующим получением снимков участка леса с мультиспектральной камеры и снимков участка леса с цифровой RGB-камеры, информации о снимках участка леса, включающей данные об условиях съемки, размере снимка, уровне освещенности местности, координатах центральной точки каждого снимка, данных для калибровки отражательной способности материалов съемки с мультиспектральной камеры, осуществляют фотограмметрическую обработку снимков, с последующим построением на основании снимков с мультиспектральной камеры ортофотоплана и облака точек по каждому из их каналов, и получением на основании снимков с цифровой RGB-камеры ортофотоплана и облака точек, по облаку точек, построенному по RGB-снимкам, осуществляют построение цифровой модели местности и цифровой модели рельефа, осуществляют корректировку высот древостоя относительно особенностей рельефа посредством вычитания цифровой модели рельефа из цифровой модели местности с последующей корректировкой облаков точек на основании снимков с цифровой RGB-камеры для получения облаков точек с нормализованными высотами, осуществляют поиск отдельных деревьев посредством автоматического обнаружения вершин деревьев на основании данных облаков точек, полученных на основании снимков с цифровой камеры, с нормализованными высотами, автоматического определения контуров крон обнаруженных деревьев с последующим получением набора вершин деревьев с их координатами и высотой и набора полигонов крон, соответствующих найденным вершинам, и получением набора признаков для каждой найденной кроны дерева, включающих вегетационные индексы, текстурные признаки, структурные метрики формы дерева, структурные метрики яркости по каждому из каналов мультиспектральной камеры, подают набор признаков конкретного дерева на вход предварительно обученной модели машинного обучения для предсказания породы дерева, с последующим получением набора вершин и крон деревьев с присвоенными метками класса, обозначающими породу дерева.
Традиционным методом определения параметров лесных массивов является таксация, которая может осуществляться глазомерным, глазомерно-измерительным, дешифровочным способами. Основными недостатками перечисленных способов является высокая трудоемкость и субъективность оценивания параметров. Кроме того, из уровня техники известны способы определения таксационных характеристик, использующие космические снимки, при этом невысокое пространственное разрешение снимков не позволяет осуществлять подеревный анализ, и как следствие не обеспечивает полноту показателей лесных массивов.
Заявленный способ обеспечивает сочетание высокой точности определения характеристик лесных насаждений и производительности получения информации за счет комбинации использования БВС самолетного типа, цифровой RGB-камеры и мультиспектральной камеры, а также последующей автоматической обработки данных с применением методов машинного обучения.
Цифровая RGB-камера обеспечивает необходимое пространственное разрешение для построения цифровых моделей местности и рельефа, а также для автоматического нахождения координат вершин и крон деревьев (в частности за счет нахождения локальных максимумов высот в нормализованном облаке точек), за счет чего в заявленном способе производится подеревный анализ и определяются параметры для каждого дерева верхнего яруса в отдельности.
Мультиспектральная камера позволяет существенно обогатить набор входной информации за счет получения спектральных данных высокого разрешения, что позволяет увеличить ассортимент признаков для осуществления классификации деревьев, за счет чего улучшается различение между видами деревьев, а значит обеспечивается точность автоматического разделения деревьев по породам. Также применение компенсации уровня освещенности (в частности за счет использования информации датчика освещенности и снимков калибровочных панелей) позволяет снизить влияние погодных условий на результаты мультиспектральной съемки, что позволяет получать более достоверную информацию для дальнейшего определения пород деревьев.
В заявленном способе производится определение пород индивидуальных деревьев верхнего яруса за счет использования набора признаков, среди которых в том числе представлена информация о трехмерной форме, характеристиках текстуры деревьев на снимках и о значениях различных вегетационных индексов. При этом все признаки рассчитываются в результате определенных преобразований данных, полученных с БВС, без участия человека или проведения наземных исследований. Предлагаемый подход позволяет эффективно использовать ресурсы, уменьшая необходимость в большом количестве рабочей силы и сокращая время обработки данных.
БВС самолетного типа позволяет получать снимки около 2000 Га в день, причем снимки мультиспектральной камеры характеризуются продольным перекрытием участка не менее 70%, и поперечным не менее 60%, а снимки с цифровой RGB-камеры, характеризуются продольным перекрытием участка не менее 80%, и поперечным не менее 60%. Это с одной стороны существенно ускоряет процесс получения ряда таксационных характеристик в отличие от наземных исследований или аэрофотосъемки с беспилотных систем мультироторного типа. С другой стороны обеспечивает получение снимков с размером проекции пикселя на местности не более 7 см для RGB-камеры и не более 30 см на пиксель для мультиспектральной камеры, что позволяет получить ортофотопланы с соответствующим размером проекции пикселя на местность и облака точек приемлемой плотности. Совокупность получаемых таким способом данных обеспечивает возможность проведения подеревного анализа лесных насаждений, а также вычисление структурны метрик яркости, текстурных метрик и вегетационных индексов деревье верхнего яруса в отдельности. Таким образом, за счет использования мультиспектральной камеры вычисляется более 100 мультиспектральных признаков, что, в свою очередь, обеспечивает возможность автоматического определения пород при помощи комбинации моделей машинного обучения. Использование автоматической классификации на основе только признаков, полученных по RGB данным не дает необходимой точности определения пород. Использование комбинации алгоритмов машинного обучения в заявленном способе позволяет достичь 98% точности при отделении мертвых деревьев от живых, 91% при разделении хвойных и лиственных пород деревьев, более 80% при разделении лиственных и хвойных на отдельные породы.
За счет использования информации из облака точек и последующего определение границ отдельных деревьев и их породы заявленный способ позволяет автоматически рассчитать диаметр кроны для каждого дерева, диаметр ствола на уровне груди и объем ствола дерева за счет использования комбинации моделей машинного обучения. При этом точность определения объема стволов составляет более 90%.
В качестве вывода полученных характеристик лесных массивов заявленный способ предполагает использовать породные планы всего отснятого участка, отражающие расположение деревьев различных пород на отснятой территории, а также тепловые карты, иллюстрирующие распределение каждой из пород по всему участку как в штуках, так и в объеме стволов деревьев.
Возможности заявленного способа автоматического получения параметров лесных массивов ограничены только дальностью участка для съемки посредством БВС. Способ позволяет получить таксационные характеристики древостоев с временными затратами порядка нескольких дней или недель (в зависимости от площади территории), что значительно сокращает сроки обновления информации о лесных массивах (обычно данную информацию получают из лесотаксационных карт, формирование которых занимает несколько лет).
В частном варианте реализации способа структурные метрики формы дерева включают среднюю высоту облака точек, соответствующего отдельному дереву, стандартное отклонение распределения высоты, коэффициенты асимметрии и эксцесса распределения высоты, квантили уровней распределения высоты.
В частном варианте реализации способа текстурные метрики кроны дерева рассчитываются по каждому каналу на основе GLCM-матрицы и включают однородность, коэффициент корреляции, энтропию, контраст, среднее значение, дисперсию перепадов яркости между соседними пикселями.
В частном варианте реализации способа структурные метрики яркости по каждому из каналов включают среднее значение яркости облака точек, соответствующего отдельному дереву, стандартное отклонение яркости, коэффициенты асимметрии и эксцесса распределения яркости, квантили уровней распределения яркости.
В частном варианте реализации способа вегетационные индексы включают индексы, выбранные из группы, включающей ARVI, DVI, EVI, GNDVI, NDVI, IPVI, RGRI, MSAVI, MSR, NDVI, OSAVI, RDVI, RVI, SARVI, SAVI, SR, SR×NDVI, GR, BI, Norm G, Norm GR.
В частном варианте реализации способа алгоритм предварительно обученной модели машинного обучения включает один алгоритм или любую комбинацию алгоритмов, выбранных из группы, включающей: алгоритм регрессии Гауссова процесса, алгоритм логистической регрессии, алгоритм случайного леса, алгоритм нечеткого классификатора, алгоритм дерева решений, алгоритм иерархической кластеризации, алгоритм обучения методом k-средних, алгоритм нечеткой кластеризации, алгоритм машинного обучения с использованием глубинной машины Больцмана, алгоритм искусственной нейронной сети, а также различные архитектуры нейронных сетей, такие как полносвязные нейронные сети, CNN (сверточные сети), RNN (рекуррентные сети), Transformer (сети трансформеры), CapsNet (капсульные сети) и их совокупности.
Заявляемое техническое решение далее поясняется с помощью фигур, на которых представлен один из возможных вариантов его исполнения.
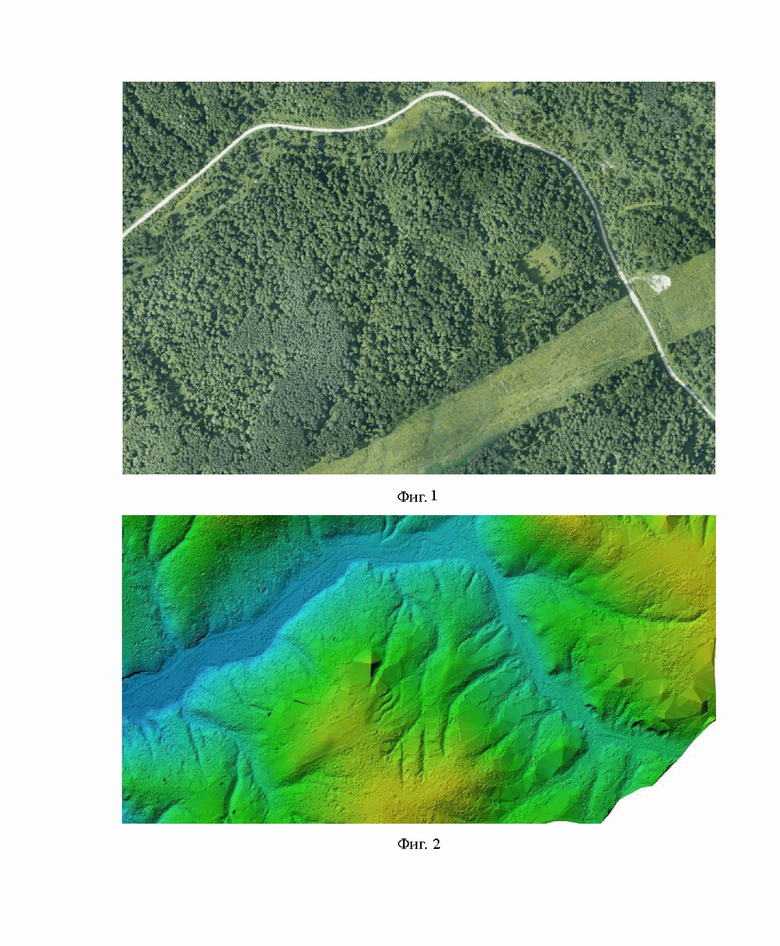
На фиг. 1 представлен ортофотоплан части отснятого участка (пример)
На фиг. 2 представлена цифровая модель рельефа отснятого участка
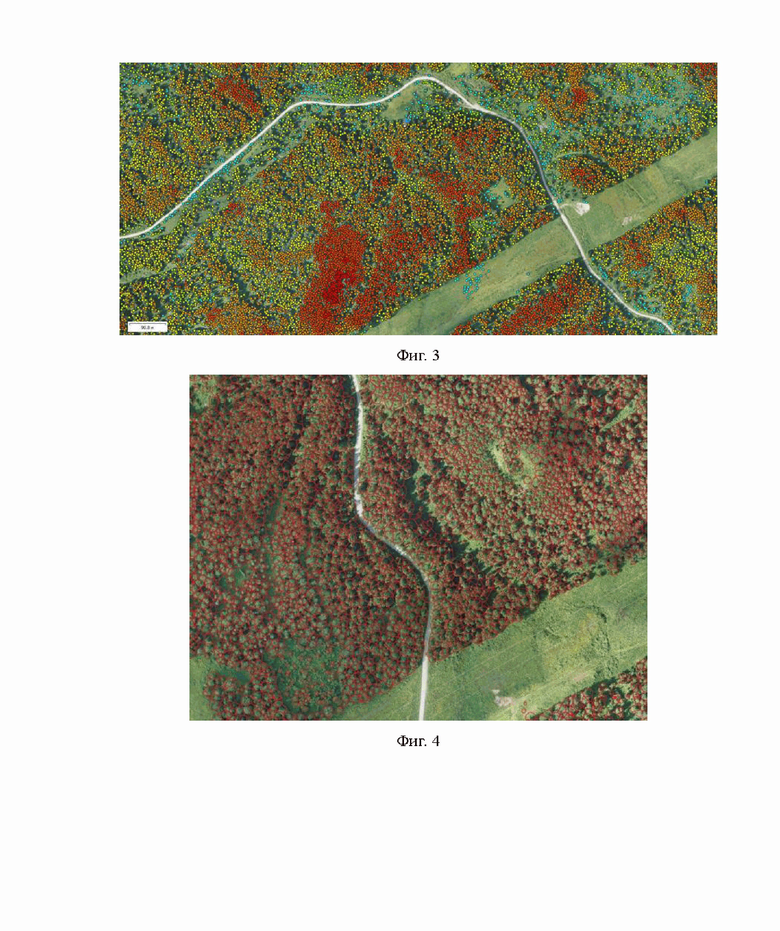
На фиг. 3 представлено изображение с найденными вершинами деревьев, разбитых на классы по высотам. Деревья разбиты на шесть групп по высоте (“низкие” - голубого цвета, “ниже среднего” - зеленого цвета, “средней высоты” - желтого, “выше среднего” - оранжевого, “высокие” - красно-оранжевого, “очень высокие” - ярко-красного).
На фиг. 4 представлено изображение с выделенными найденными кронами деревьев
На фиг. 5 представлен породный план части отснятого участка (желтым цветом отмечены хвойные, бирюзовым - осины, розовым - березы)
На фиг. 6 представлена тепловая карта распределения берез (сгущение красного цвета отражает увеличение количества берез)
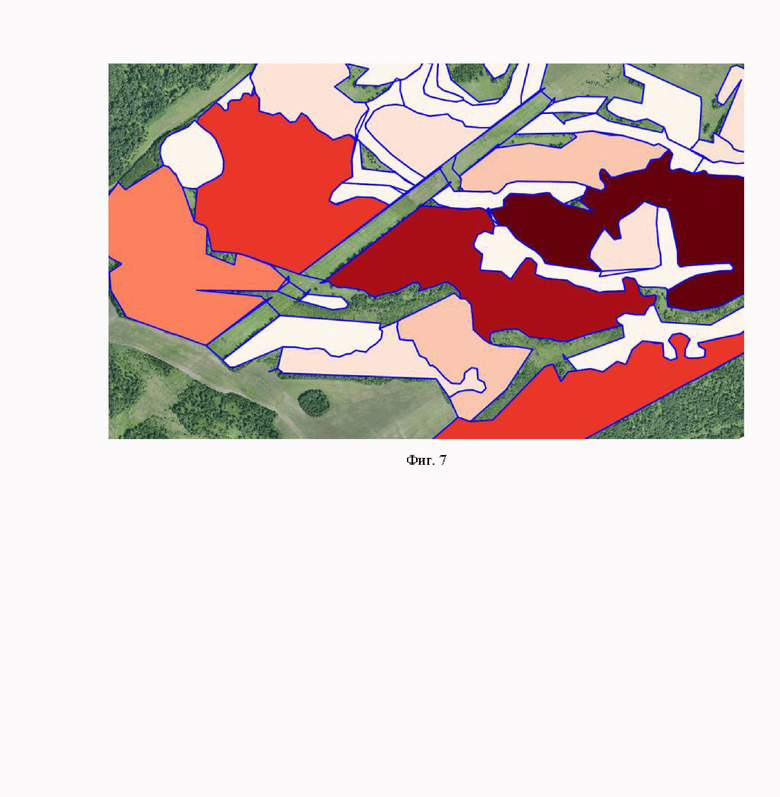
На фиг. 7 представлена тепловая карта распределения запаса березовой древесины (чем насыщеннее красный цвет, тем больше объем древесины).
Далее со ссылками на фигуры описан предпочтительный вариант осуществления заявленного технического решения.
Для определения параметров лесного массива (таких как породный состав и другие характеристики, включающие оценку запаса древесины) на первом этапе осуществляют съемку участка леса с беспилотного воздушного судна, предпочтительно, на высоте до 500 м, посредством мультиспектральной камеры с не менее четырьмя каналами (в частности, зеленым, красным, дальним красным и ближним инфракрасным каналами, с разрешением не хуже 30 см на 1 пиксель), и цифровой RGB-камерой (в частности, с разрешением не хуже 7 см на 1 пиксель). По результатам съемки получают снимки участка леса с мультиспектральной камеры, предпочтительно, характеризующихся продольным перекрытием не менее 70%, и поперечным не менее 60%, снимки участка леса с цифровой RGB-камеры, предпочтительно, характеризующихся продольным перекрытием участка не менее 80%, и поперечным не менее 60%, с информацией о снимках участка леса, включающей данные об условиях съемки, размере снимка, уровне освещенности снимка (например, от датчика уровня освещенности), координатах центральной точки снимка, данных для калибровки отражательной способности материалов съемки с мультиспектральной камеры (например, параметры калибровочных панелей и их снимки до и после полета).
Затем осуществляют фотограмметрическую обработку снимков, с последующим построением на основании снимков с мультиспектральной камеры ортофотоплана и облака точек по каждому из их каналов, предпочтительно, с плотностью не менее 8 точек на м2, и получением на основании снимков с цифровой RGB-камеры ортофотоплана (фиг. 1) и облака точек, предпочтительно, с плотностью не менее 30 точек на м2.
Далее осуществляют построение цифровой модели местности и цифровой модели рельефа (фиг. 2).
Затем осуществляют корректировку высот древостоя относительно особенностей рельефа посредством вычитания цифровой модели рельефа из цифровой модели местности с последующей корректировкой облаков точек на основании снимков с цифровой камеры для получения облаков точек с нормализованными высотами.
Затем осуществляют поиск отдельных деревьев посредством автоматического обнаружения вершин деревьев на основании данных облаков точек (фиг. 3), полученных на основании снимков с цифровой камеры, с нормализованными высотами, определения контуров крон обнаруженных деревьев (фиг. 4). Предпочтительно обнаружение вершин деревьев осуществляют посредством определения локальных максимумов облака точек с нормализованными высотами по снимку с цифровой RGB- камеры.
Далее получают набор вершин деревьев с их координатами и высотой и набор полигонов крон, соответствующих найденным вершинам, и набор признаков для каждой найденной кроны дерева, включающих вегетационные индексы, текстурные признаки, структурные метрики формы дерева, структурные метрики яркости по каждому из каналов мультиспектральной камеры. Структурные метрики формы дерева могут включать среднюю высоту облака точек, соответствующую отдельному дереву, стандартное отклонение распределения высоты, коэффициенты асимметрии и эксцесса распределения высоты, квантили уровней распределения высоты. Текстурные признаки кроны дерева могут быть рассчитаны по каждому каналу на основе GLCM-матрицы и включать однородность, коэффициент корреляции, энтропию, контраст, среднее значение, дисперсию перепадов яркости между соседними пикселями. Структурные метрики яркости по каждому из каналов могут включать среднее значение яркости облака точек, соответствующего отдельному дереву, стандартное отклонение яркости, коэффициенты асимметрии и эксцесса распределения яркости, квантили уровней распределения яркости. Вегетационные индексы могут включать индексы, выбранные из группы, включающей ARVI, DVI, EVI, GNDVI, NDVI, IPVI, RGRI, MSAVI, MSR, NDVI, OSAVI, RDVI, RVI, SARVI, SAVI, SR, SR×NDVI, GR, BI, Norm G, Norm GR или их любую комбинацию.
Готовый набор признаков конкретного дерева подают на вход предварительно обученной модели машинного обучения для предсказания породы дерева, с последующим получением набора вершин и крон деревьев с присвоенными метками класса, обозначающими породу дерева. Предпочтительно, алгоритм предварительно обученной модели машинного обучения включает один алгоритм или любую комбинацию алгоритмов, выбранных из группы, включающей: алгоритм регрессии Гауссова процесса, алгоритм логистической регрессии, алгоритм случайного леса, алгоритм нечеткого классификатора, алгоритм дерева решений, алгоритм иерархической кластеризации, алгоритм обучения методом k-средних, алгоритм нечеткой кластеризации, алгоритм машинного обучения с использованием глубинной машины Больцмана, алгоритм искусственной нейронной сети, а также различные архитектуры нейронных сетей, такие как полносвязные нейронные сети, CNN (сверточные сети), RNN (рекуррентные сети), Transformer (сети трансформеры), CapsNet (капсульные сети) и их совокупности.
Дополнительно могут быть построены: породный план всего участка леса (фиг. 5), тепловые карты распределения каждой породы по всему участку (фиг. 6). Также могут быть вычислены диаметр кроны дерева, диаметр ствола на уровне груди и объем ствола, что позволяет дополнительно построить тепловые карты запаса стволовой древесины по породам деревьев. Тепловые карты могут быть построены как по сетке с заданным шагом (фиг. 6), так и по квартально-выдельной сети (фиг. 7)
Представленные фигуры, описание реализации способа определения параметров лесного массива не ограничивают каким-либо образом объем заявляемого технического решения. Возможны иные варианты исполнения и использования в объеме заявляемой формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАПАСОВ СТВОЛОВОЙ ДРЕВЕСИНЫ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ ВОЗДУШНОЙ БЕСПИЛОТНОЙ СЪЕМКИ | 2021 |
|
RU2773144C1 |
| Система мониторинга лесопользования и лесопатологических изменений | 2019 |
|
RU2716477C1 |
| Способ актуализации лесотаксационных данных на основе машинного обучения | 2020 |
|
RU2739436C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭКОЛОГИЧЕСКОГО СОСТОЯНИЯ ЛЕСОВ | 2009 |
|
RU2416192C2 |
| МЕТОДИКА ДИСТАНЦИОННОЙ РЕКОГНОСЦИРОВОЧНОЙ ДИАГНОСТИКИ ОБЕСПЕЧЕНИЯ РАСТЕНИЙ АЗОТОМ (С ПОМОЩЬЮ МУЛЬТИСПЕКТРАЛЬНОЙ КАМЕРЫ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ) | 2018 |
|
RU2693255C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТАВА НАСАЖДЕНИЙ | 2008 |
|
RU2371910C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТАВА НАСАЖДЕНИЙ | 2010 |
|
RU2428004C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ЛЕСОВ | 2009 |
|
RU2406295C1 |

Изобретение относится к вычислительной технике, а именно к технологии определения параметров лесного массива посредством осуществления его предварительной съемки с беспилотных летательных аппаратов. Способ определения параметров лесного массива, при котором осуществляют съемку участка леса с беспилотного воздушного судна посредством мультиспектральной камеры с не менее чем четырьмя каналами и цифровой RGB-камеры с последующим получением снимков участка леса с мультиспектральной камеры и снимков участка леса с цифровой RGB-камеры, информации о снимках участка леса, осуществляют фотограмметрическую обработку снимков с последующим построением на основании снимков с мультиспектральной камеры ортофотоплана и облака точек по каждому из их каналов и получением на основании снимков с цифровой RGB-камеры ортофотоплана и облака точек. По облаку точек, построенному по RGB-снимкам, осуществляют построение цифровой модели местности и цифровой модели рельефа, осуществляют корректировку высот древостоя относительно особенностей рельефа, осуществляют поиск отдельных деревьев, подают набор признаков конкретного дерева на вход предварительно обученной модели машинного обучения для предсказания породы дерева с последующим получением набора вершин и крон деревьев с присвоенными метками класса, обозначающими породу дерева. Технический результат - автоматизация процесса определения параметров лесного массива, таких как породный состав и другие характеристики, включающие оценку запаса древесины, а также повышение точности их определения по данным АФС. 13 з.п. ф-лы, 7 ил.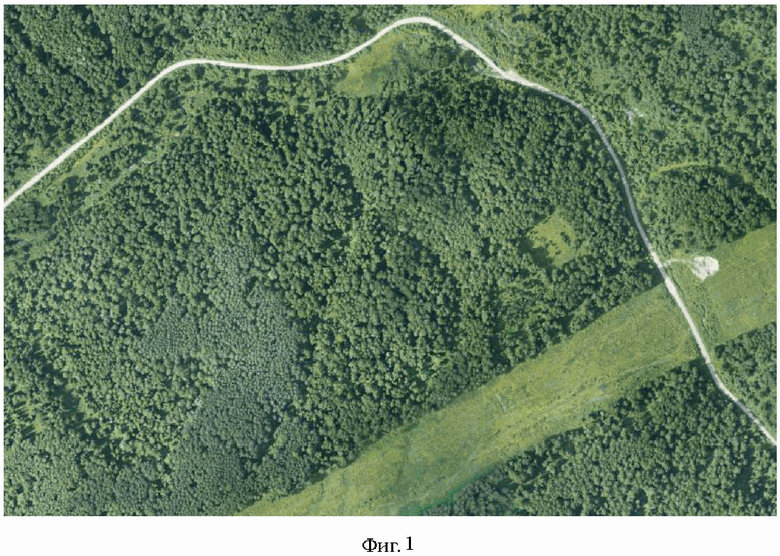
1. Способ определения параметров лесного массива, при котором осуществляют съемку участка леса с беспилотного воздушного судна посредством мультиспектральной камеры с не менее чем четырьмя каналами и цифровой RGB-камеры с последующим получением снимков участка леса с мультиспектральной камеры и снимков участка леса с цифровой RGB-камеры, информации о снимках участка леса, включающей данные об условиях съемки, размере снимка, уровне освещенности местности, координатах центральной точки каждого снимка, данных для калибровки отражательной способности материалов съемки с мультиспектральной камеры, осуществляют фотограмметрическую обработку снимков с последующим построением на основании снимков с мультиспектральной камеры ортофотоплана и облака точек по каждому из их каналов и получением на основании снимков с цифровой RGB-камеры ортофотоплана и облака точек, по облаку точек, построенному по RGB-снимкам, осуществляют построение цифровой модели местности и цифровой модели рельефа, осуществляют корректировку высот древостоя относительно особенностей рельефа посредством вычитания цифровой модели рельефа из цифровой модели местности с последующей корректировкой облаков точек на основании снимков с цифровой RGB-камеры для получения облаков точек с нормализованными высотами, осуществляют поиск отдельных деревьев посредством автоматического обнаружения вершин деревьев на основании данных облаков точек, полученных на основании снимков с цифровой камеры, с нормализованными высотами, автоматического определения контуров крон обнаруженных деревьев с последующим получением набора вершин деревьев с их координатами и высотой и набора полигонов крон, соответствующих найденным вершинам, и получением набора признаков для каждой найденной кроны дерева, включающих вегетационные индексы, текстурные признаки, структурные метрики формы дерева, структурные метрики яркости по каждому из каналов мультиспектральной камеры, подают набор признаков конкретного дерева на вход предварительно обученной модели машинного обучения для предсказания породы дерева с последующим получением набора вершин и крон деревьев с присвоенными метками класса, обозначающими породу дерева.
2. Способ определения параметров лесного массива по п. 1, отличающийся тем, что используют мультиспектральную камеру с как минимум зеленым, красным, дальним красным и ближним инфракрасным каналами, по снимкам с которой строится ортофотоплан с размером проекции пикселя на местности не более 30 см.
3. Способ определения параметров лесного массива по п. 1, отличающийся тем, что используют цифровую RGB-камеру, по снимкам с которой строится ортофотоплан с размером проекции пикселя на местности не более 7 см.
4. Способ определения параметров лесного массива по п. 1, отличающийся тем, что съемку осуществляют с получением снимков с мультиспектральной камеры, характеризующихся продольным перекрытием не менее 70% и поперечным не менее 60%, и снимков с цифровой RGB-камеры, характеризующихся продольным перекрытием не менее 80% и поперечным не менее 60%.
5. Способ определения параметров лесного массива по п. 1, отличающийся тем, что обнаружение вершин деревьев осуществляют посредством автоматического определения локальных максимумов облака точек, полученного по снимкам с цифровой RGB-камеры, высота всех точек которого была предварительно нормализована относительно модели рельефа местности.
6. Способ определения параметров лесного массива по п. 1, отличающийся тем, что структурные метрики формы дерева включают среднюю высоту соответствующего фрагмента нормализованного облака точек, соответствующего отдельному дереву, стандартное отклонение распределения высоты, коэффициенты асимметрии и эксцесса распределения высоты, квантили уровней распределения высоты.
7. Способ определения параметров лесного массива по п. 1, отличающийся тем, что текстурные метрики кроны дерева рассчитываются по каждому ортофотоплану, построенному по снимкам с соответствующего канала мультиспектральной камеры, на основе GLCM-матрицы и включают однородность, коэффициент корреляции, энтропию, контраст, среднее значение, дисперсию перепадов яркости между соседними пикселями.
8. Способ определения параметров лесного массива по п. 1, отличающийся тем, что структурные метрики яркости точек облака точек, построенного по снимкам с каждого из каналов мультиспектральной камеры, включают среднее значение яркости облака точек, соответствующего отдельному дереву, стандартное отклонение яркости, коэффициенты асимметрии и эксцесса распределения яркости, квантили уровней распределения яркости.
9. Способ определения параметров лесного массива по п. 1, отличающийся тем, что вегетационные индексы включают индексы, выбранные из группы, включающей ARVI, DVI, EVI, GNDVI, NDVI, IPVI, RGRI, MSAVI, MSR, NDVI, OSAVI, RDVI, RVI, SARVI, SAVI, SR, SR×NDVI, GR, BI, Norm G, Norm GR.
10. Способ определения параметров лесного массива по п. 1, отличающийся тем, что предварительно обученная модель машинного обучения включает один алгоритм или любую комбинацию алгоритмов, выбранных из группы, включающей: алгоритм регрессии Гауссова процесса, алгоритм логистической регрессии, алгоритм случайного леса, алгоритм нечеткого классификатора, алгоритм дерева решений, алгоритм иерархической кластеризации, алгоритм обучения методом k-средних, алгоритм нечеткой кластеризации, алгоритм машинного обучения с использованием глубинной машины Больцмана, алгоритм искусственной нейронной сети, а также различные архитектуры нейронных сетей, такие как полносвязные нейронные сети, CNN (сверточные сети), RNN (рекуррентные сети), Transformer (сети трансформеры), CapsNet (капсульные сети) и их совокупности.
11. Способ определения параметров лесного массива по п. 1, отличающийся тем, что дополнительно строится породный план всего участка леса и тепловые карты распределения каждой породы по всему участку.
12. Способ определения параметров лесного массива по п. 1, отличающийся тем, что дополнительно автоматически вычисляются следующие параметры деревьев: диаметр кроны дерева, диаметр ствола на уровне груди.
13. Способ определения параметров лесного массива по п. 1, отличающийся тем, что дополнительно автоматически определяется объем ствола при помощи комбинации моделей машинного обучения с последующим получением набора координат деревьев с высотой, метками породы и объемами стволов.
14. Способ определения параметров лесного массива по п. 1, отличающийся тем, что дополнительно строятся тепловые карты запаса стволовой древесины по породам деревьев.
| CN 107705309 A, 16.02.2018 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАПАСОВ СТВОЛОВОЙ ДРЕВЕСИНЫ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ ВОЗДУШНОЙ БЕСПИЛОТНОЙ СЪЕМКИ | 2021 |
|
RU2773144C1 |
| Способ актуализации лесотаксационных данных на основе машинного обучения | 2020 |
|
RU2739436C1 |
| Система мониторинга лесопользования и лесопатологических изменений | 2019 |
|
RU2716477C1 |
| CN 111428784 A, 17.07.2020 | |||
| US 7091559 N, 11.04.1989. | |||

