Изобретение относится к измерительной технике и может быть использовано в геодезии для решения задач контроля деформаций зданий и сооружений, связанных с определением координат точек объекта.
Известны способы определения координат точек объекта. Среди них можно отметить [1, 2].
Принцип работы способов [1, 2] основан на выполнении угловых и линейных измерений геодезическими приборами с последующим вычислением координат точек объекта.
Общий недостаток известных способов [1, 2] заключается в том, определение координат точек объекта выполняют относительно исходной точки (опорного пункта) координаты которой непостоянны вследствие протекания геологических и температурных изменений в земной поверхности. Это в свою очередь обусловливает наличие дополнительных погрешностей в определении координат точек объекта.
Наиболее близким по технической сущности и достигаемому результату является способ прямой угловой засечки [3, с. 116]. Данный способ, который выбран в качестве прототипа, характеризуется выполнением следующих действий:
- на некотором удалении от сооружения, обеспечивающем выгоднейшие условия засечки, устанавливают два угломерных прибора (теодолита, тахеометра) на пунктах засечки с известными координатами;
- выполняют центрирование угломерных приборов;
- измеряют углы между направлением стороны пунктов засечки и направлениями на контролируемые точки объекта;
- вычисляют координаты контролируемых точек по координатам пунктов засечки и дирекционным углам направлений на контролируемые точки объекта.
К недостаткам способа следует отнести высокие требования к стабильности пунктов засечки, к точности их взаимного положения и центрирования приборов на пунктах. Так, при точности определения координат контролируемых точек объекта со средней квадратической погрешностью (СКП), равной 1 мм, погрешности взаимного положения пунктов засечки и центрирования приборов на них не должны превышать 0,1 мм, что не достигается в реальных условиях.
Целью изобретения является повышение точности и оперативности определения координат точек объекта.
Поставленная цель достигается тем, что нестабильную плановую опорную сеть объекта заменяют ориентирной сетью. Угломерные приборы (тахеометры, теодолиты) устанавливают на двух наблюдательных столбах с неизвестными координатами на некотором удалении от сооружения, обеспечивающем углы засечки в пределах 60-120°. Определяют значение угла разворота лимба (ориентирующего угла) для каждого угломерного прибора [4] с целью устранения зависимости от плановой нестабильности наблюдательных столбов, погрешностей центрирования и исходных данных. Координаты контролируемых точек объекта определяют по ориентирующему углу прибора, определяемому с точностью, превышающей точность измерения направлений.
Так, например, по измерениям направлений прибором, размещаемым внутри треугольника из ОРП, значение СКП определения ориентирующего угла  варьируется от
варьируется от  до
до  (где mN - СКП измерения направлений). Значение дирекционного угла (азимута) направления на контролируемую i-ую точку по ориентирующему углу рассчитывают по формуле αi=α0+Ni, (где αi - дирекционный угол, α0 - ориентирующий угол прибора, Ni - измеренное направление на контролируемую точку).
(где mN - СКП измерения направлений). Значение дирекционного угла (азимута) направления на контролируемую i-ую точку по ориентирующему углу рассчитывают по формуле αi=α0+Ni, (где αi - дирекционный угол, α0 - ориентирующий угол прибора, Ni - измеренное направление на контролируемую точку).
Изобретение поясняется описанием конкретного, но не ограничивающего существа изобретения вариантом его выполнения и прилагаемыми чертежами.
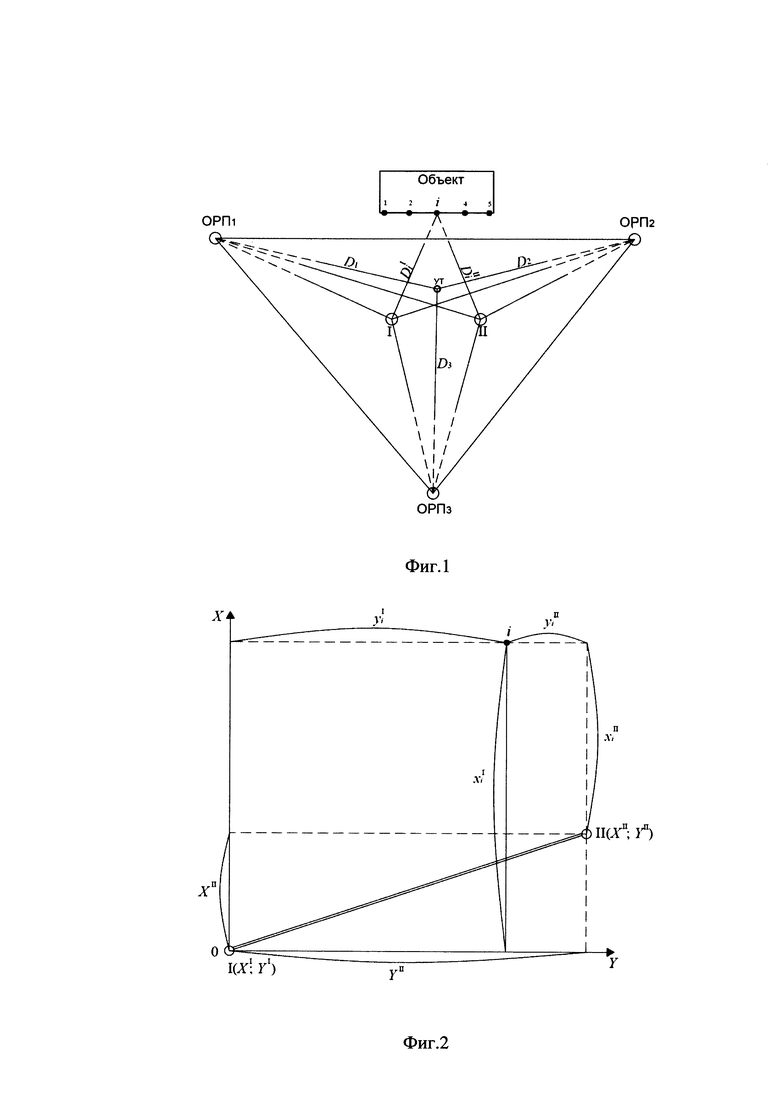
На фиг. 1 представлен вариант размещения ориентирных пунктов (ОРП), мест установки угломерных приборов на наблюдательных столбах и контролируемых точек на объекте; на фиг. 2 изображена схема перехода от координат контролируемой точки к координатам приборов.
Способ осуществляется следующим образом:
1) На некотором удалении от центра контролируемого объекта заблаговременно создают ориентирную сеть в виде треугольника с вершинами ОРП1, ОРП2, ОРП3.
2) Устанавливают прибор, внутри ориентирной сети, в произвольной узловой точке (УТ) и измеряют направления и расстояния до ОРП1, ОРП2, ОРП3. Узловую точку на местности не закрепляют. Измерения с УТ необходимы для фиксации взаимного положений ОРП1, ОРП2, ОРП3. Измеряемые величины позволяют вычислить длины сторон и внутренние углы треугольника ОРП1ОРП2ОРП3.
3) Устанавливают приборы вблизи центра фигуры треугольника ОРП1ОРП2ОРП3 на наблюдательных столбах (I и II) с неизвестными координатами и измеряют направления на три ОРП.
4) Определяют значение ориентирующего угла для каждого прибора.
5) Не меняя ориентировки приборов, измеряют направления, расстояния и превышения на контролируемые точки объекта.
6) Повторно измеряют направления на три ОРП.
7) Вычисляют координаты контролируемых точек объекта по ориентирующему углу относительно положения каждого прибора.
8) Перевычисляют координаты контролируемых точек объекта в условной системе координат с началом на одной из контролируемых точек (опорной марке), закрепляемой на стабильном основании объекта.
Камеральная обработка измерений сводится к следующему.
1. Вычисляют значение ориентирующего угла для I и II прибора по формуле

где  - значение ориентирующего угла j-го (I, II) прибора; Dn(1,2,3) - горизонтальное проложение (расстояние) от УТ до ОРПn(1,2,3); αn(1,2,3) - дирекционный угол (азимут) направления стороны УТ-ОРПn(1,2,3); Nn(1,2,3) - измеренное направление прибором на ОРПn(1,2,3).
- значение ориентирующего угла j-го (I, II) прибора; Dn(1,2,3) - горизонтальное проложение (расстояние) от УТ до ОРПn(1,2,3); αn(1,2,3) - дирекционный угол (азимут) направления стороны УТ-ОРПn(1,2,3); Nn(1,2,3) - измеренное направление прибором на ОРПn(1,2,3).
2. Вычисляют координаты контролируемых точек объекта относительно положения j-го прибора по формулам

где  - горизонтальное проложение (расстояние) от j-го прибора до контролируемой точки;
- горизонтальное проложение (расстояние) от j-го прибора до контролируемой точки;  - измеренное направление на контролируемую точку объекта; i - номер контролируемой точки
- измеренное направление на контролируемую точку объекта; i - номер контролируемой точки
3. Находят координаты и превышение прибора II относительно прибора I по формулам
где n - количество наблюдаемых точек объекта;  - превышение контролируемой точки над первым прибором;
- превышение контролируемой точки над первым прибором;  - превышение контролируемой точки над вторым прибором.
- превышение контролируемой точки над вторым прибором.
4. Вычисляют координаты точек объекта относительно положения первого прибора

где 
 - значение ориентирующего угла прибора I, (II);
- значение ориентирующего угла прибора I, (II); 
 - измеренное направление на контролируемую точку объекта прибором I, (II).
- измеренное направление на контролируемую точку объекта прибором I, (II).
5. Перевычисляют координаты контролируемых точек объекта в условной системе координат с началом на одной из контролируемых точек (опорной марке), закрепляемой на стабильном основании объекта.

где xi, yi, zi - координаты контролируемой точки в условной системе координат с началом на опорной марке; 
 - координаты и превышение опорной марки относительно прибора I.
- координаты и превышение опорной марки относительно прибора I.
Приведенный авторами анализ научно-технической литературы позволяет сделать вывод о патентной новизне предлагаемого способа определения координат точек объекта.
Источники информации, используемые для составления заявки:
1. Патент РФ №2063610. Способ определения координат точек объекта / О.А. Прошляков, А.Э. Дубинский - №5035476/28; Заявлено 1992.04.01. - Опубликовано 1996.07.10.
2. Авторское свидетельство СССР №1578473. Способ определения координат точек объекта / Г.В. Нефедов, А.В. Дегтярев, В.Л. Демидов - №4308276/25-10; Заявлено 23.09.87. - Опубликовано 15.07.90. Бюл. №26;
3. Смолич, С.В. Инженерная геодезия: учебное пособие / С.В. Смолич, А.Г. Верхотуров, В.И. Савельева. - Чита: ЧитГУ, 2009. - 185 с.
4. Авторское свидетельство СССР №949338. Способ определения угла разворота лимба угломерного прибора / Н.А.Козлов - №2750651/18-10; Заявлено 09.04.79. - Опубликовано 07.08.82. Бюл. №29.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ совместного определения координат, высот и дирекционных углов направлений | 2022 |
|
RU2798764C1 |
| Способ прямой векторной засечки | 2020 |
|
RU2735311C1 |
| Способ передачи ориентирования | 2021 |
|
RU2761934C1 |
| СПОСОБ БЕЗОТВЕСНОЙ ГОРИЗОНТАЛЬНОЙ СОЕДИНИТЕЛЬНОЙ СЪЕМКИ ПОДЭТАЖНЫХ ГОРИЗОНТОВ С ПОМОЩЬЮ ЭЛЕКТРОННОГО ТАХЕОМЕТРА | 2020 |
|
RU2736698C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства | 2017 |
|
RU2657334C1 |
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
Изобретение относится к измерительной технике и может быть использовано в геодезии для решения задач контроля деформаций зданий и сооружений, связанных с определением координат точек объекта. В способ определения координат точек объекта на некотором удалении от контролируемого объекта устанавливают два угломерных прибора, измеряют расстояния, превышения и направления на контролируемые точки объекта, выполняют камеральную обработку измерений и определяют координаты контролируемых точек объекта. При этом на некотором удалении от центра контролируемого объекта создают ориентирную сеть в виде треугольника, проводят измерения с наблюдательных столбов с неизвестными координатами, вычисляют координаты контролируемых точек объекта по ориентирующему углу относительно положения каждого прибора, перевычисляют координаты контролируемых точек объекта в условной системе координат с началом на опорной марке. Технический результат – повышение точности и оперативности определения координат точек объекта. 2 ил.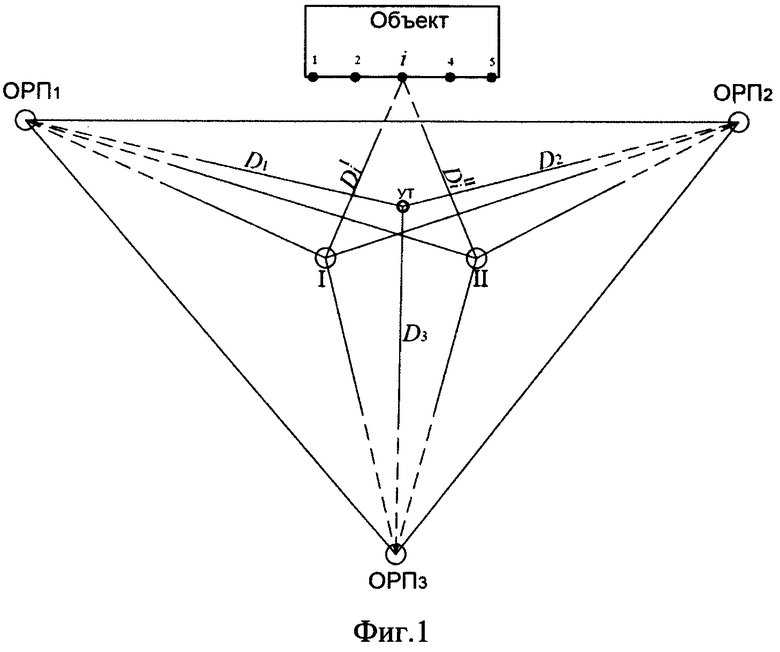
Способ определения координат точек объекта, при котором на некотором удалении от контролируемого объекта устанавливают два угломерных прибора, измеряют расстояния, превышения и направления на контролируемые точки объекта, выполняют камеральную обработку измерений и определяют координаты контролируемых точек объекта, отличающийся тем, что на некотором удалении от центра контролируемого объекта создают ориентирную сеть в виде треугольника, проводят измерения с наблюдательных столбов с неизвестными координатами, вычисляют координаты контролируемых точек объекта по ориентирующему углу относительно положения каждого прибора, перевычисляют координаты контролируемых точек объекта в условной системе координат с началом на опорной марке.
| СПОСОБ ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ТОЧЕК ОБЪЕКТА | 1991 |
|
RU2012853C1 |
| УСТРОЙСТВО ДЛЯ ВНЕЦЕНТРЕННЫХ ИЗМЕРЕНИЙ | 2011 |
|
RU2552393C2 |
| Способ определения угла разворота лимба угломерного прибора | 1979 |
|
SU949338A1 |
| RU 2063610 C1, 10.07.1996 | |||
| KR 101498149 B1, 04.03.2015. | |||

