Изобретение относится к измерительной технике и может быть использовано в геодезии для решения задач по определению величины и скорости протекания суточных перемещений отдельных конструктивных элементов зданий, сооружений и объекта в целом.
Известен способ определения координат точек объекта [1], заключающийся в прокладывании теодолитных ходов, при котором измеряют расстояния между точками объекта и углы, составленные сторонами хода, далее вычисляют координаты точек объекта. Для определения высотных отметок контролируемых точек необходимо произвести дополнительные измерения, не предусмотренные способом.
Известен также способ [2], при котором устанавливают теодолит в точке с известными координатами, последовательно измеряют азимуты и зенитные расстояния до точек объекта, измеряют расстояния не менее чем между тремя точками, определяют радиус-векторы соответствующих точек объекта относительно точки с известными координатами и вычисляют искомые координаты.
Общим недостатком известных аналогов [1, 2] является то, что вследствие воздействия погрешностей, связанных с координатными условиями (погрешностями в координатах центров пунктов, погрешностями установки приборов над центрами, температурными и сезонными перемещениями пунктов), практически не представляется возможным обеспечить требуемую точность геодезических построений.
Наиболее приемлемым способом для контроля недоступных точек на объекте является способ прямой угловой засечки [3]. Данный способ, который выбран в качестве прототипа, характеризуется выполнением следующих действий:
- на некотором удалении от сооружения устанавливают два геодезических пункта засечки и от пунктов государственной геодезической сети (ГГС) определяют их координаты и дирекционный угол (азимут) направления стороны пунктов засечки;
- на пунктах засечки устанавливают угломерные приборы (теодолиты, тахеометры) с их последующим центрированием;
- измеряют углы между направлением стороны пунктов засечки и направлениями на контролируемые точки сооружения;
- вычисляют дирекционные углы направлений наблюдаемых точек по дирекционному углу направления стороны пунктов засечки и измеряемым углам;
- вычисляют координаты наблюдаемых точек по координатам пунктов засечки и дирекционным углам направлений на контролируемые точки.
Выбранный в качестве прототипа способ имеет следующие недостатки:
- координаты пунктов засечки определяют с погрешностью, вызывающей искажение длины исходной стороны пунктов засечки и некоторый азимутальный разворот, в результате этого координаты контролируемых точек получают различные приращения;
- погрешность центрирования приборов на пунктах сопоставима с допустимой погрешностью наблюдения контролируемых точек объекта;
- пункты засечки устанавливают на значительном удалении от контролируемого объекта на стабильных грунтах, что пропорционально снижает точность определения координат контролируемых точек;
- при выполнении натурных измерений не возможно точное наведение оптической трубы прибора на смежный пункт засечки, на котором размещается второй прибор.
Одной из важнейших задач геодезического контроля уникальных зданий и сооружений, таких как крупноапертурные стационарные фазированные антенные решетки (ФАР) и стартовые комплексы, является определение величины и скорости протекания суточных перемещений отдельных конструктивных элементов, а не значений координат контролируемых точек. При этом предъявляются повышенные требования к оперативности и синхронности наблюдений с пунктов и к соблюдению выгоднейших условий наблюдений (выполнение измерений с минимальных расстояний до контролируемых точек при углах засечки 60-120°).
Задачей заявленного изобретения является упрощение технической реализации за счет определения значений перемещений контролируемых точек непосредственно по приращениям измеренных величин, без вычисления координат контролируемых точек объекта.
Указанный технический результат достигается тем, что:
- на территории контролируемого объекта не создают опорную сеть в виде пунктов засечки с их последующей привязкой к пунктам ГГС;
- угломерные приборы устанавливают внутри сети ориентирных пунктов (ОРП) вне центров пунктов, в точках на местности, обеспечивающих выгоднейшие условия наблюдений;
- выполняют измерения углов и расстояний на контролируемые точки;
- выполняют ориентирование координатных осей посредством способа определения угла разворота лимба угломерного прибора [4] с точностью, превышающей точность измерения направлений;
- рассчитывают значения перемещений контролируемых точек непосредственно по приращениям измеренных величин, без вычисления координат контролируемых точек.
Предлагаемый способ поясняется описанием конкретного, но не ограничивающего существа изобретения варианта его выполнения и предлагаемыми чертежами.
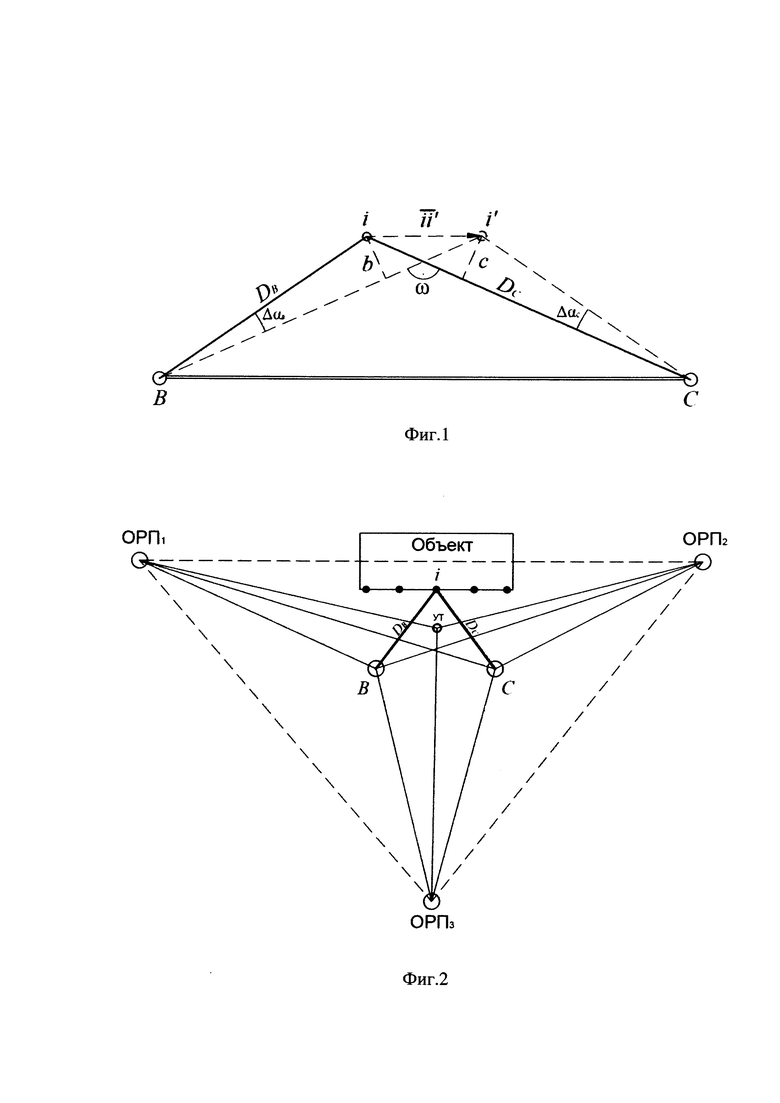
На фиг. 1 изображена схема способа прямой векторной засечки; на фиг. 2 представлена схема сети ориентирных пунктов.
Способ осуществляется следующим образом:
1) Угломерные приборы В и С (фиг. 1) устанавливают внутри сети ориентирных пунктов вне центров пунктов, в точках на местности, обеспечивающих наблюдения контролируемых точек с минимальных расстояниях при углах засечки, близких к 90°.
2) Определяют угол разворота лимба угломерных приборов В и С по измерениям направлений на ориентирные пункты (фиг. 2) по формуле [4]


где Dn(1,2,3) - расстояния от узловой точки (УТ) до ОРПn(1,2,3); αn(1,2,3) - дирекционные углы (азимуты) направлений сторон УТ-ОРПn(1,2,3); Nn(1,2,3) - измеряемые направления приборами В и С на ОРПn(1,2,3).
3) Без изменения ориентировки угломерных приборов измеряют направления и расстояния до контролируемых точек и вычисляют дирекционные углы их направлений. В последующих циклах контрольных наблюдений фиксируют только отсчеты по горизонтальному кругу.
4) По разности дирекционных углов направлений между смежными циклами измерений определяют величины угловых перемещений контролируемых точек по формулам

5) Вычисляют величины линейных перемещений b и с по формулам:

где DB - расстояние от прибора В до наблюдаемой точки i; DC - расстояние от прибора С до наблюдаемой точки i; ρ”=206265”.
Суммарный вектор перемещения  контролируемой точки может быть получен по величине суммарных перемещений b и с, однако, анализ перемещений упрощается, если вычислять приращения координат контролируемых точек по формулам:
контролируемой точки может быть получен по величине суммарных перемещений b и с, однако, анализ перемещений упрощается, если вычислять приращения координат контролируемых точек по формулам:

Средняя квадратическая погрешность (СКП) определения величины перемещения  контролируемой точки оценивается по известной формуле для прямой угловой засечки
контролируемой точки оценивается по известной формуле для прямой угловой засечки

где m - СКП измерения углового перемещения наблюдаемой точки прибором.
Приведенный авторами анализ научно-технической литературы позволяет сделать вывод о патентной новизне предлагаемого способа прямой векторной засечки.
Источники информации, используемые для составления заявки:
1. Патент РФ №2063610. Способ определения координат точек объекта /О.А. Прошляков, А.Э. Дубинский - №5035476/28; Заявлено 1992.04.01. - Опубликовано 1996.07.10;
2. Авторское свидетельство СССР №1578473. Способ определения координат точек объекта / Г.В. Нефедов, А.В. Дегтярев, В.Л. Демидов - №4308276/25-10; Заявлено 23.09.87. - Опубликовано 15.07.90. Бюл. №26;
3. Смолич, С.В. Инженерная геодезия: учебное пособие / С.В. Смолич, А.Г. Верхотуров, В.И. Савельева. - Чита:ЧитГУ, 2009. - 185 с.
4. Авторское свидетельство СССР №949338. Способ определения угла разворота лимба угломерного прибора / Н.А. Козлов - №2750651/18-10; Заявлено 09.04.79. - Опубликовано 07.08.82. Бюл. №29.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат точек объекта | 2020 |
|
RU2740686C1 |
| Способ совместного определения координат, высот и дирекционных углов направлений | 2022 |
|
RU2798764C1 |
| Способ передачи ориентирования | 2021 |
|
RU2761934C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ОТНОСИТЕЛЬНЫХ ОПРЕДЕЛЕНИЙ ПАРАМЕТРОВ | 2011 |
|
RU2469273C1 |
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
Изобретение относится к измерительной технике и может быть использовано в геодезии для решения задач по определению величины и скорости протекания суточных перемещений отдельных конструктивных элементов зданий, сооружений и объекта в целом. При выполнении геодезического контроля объекта на местности внутри сети ориентирных пунктов устанавливают два угломерных прибора (теодолит, тахометр) вне центров пунктов в точках, обеспечивающих выгоднейшие условия определения приращений координат контролируемых точек. Выполняют ориентирование координатных осей посредством способа определения угла разворота лимба угломерного прибора. Производят расчет значений перемещений контролируемых точек непосредственно по приращениям измеренных величин без вычисления координат контролируемых точек объекта. Технический результат – упрощение технической реализации за счет определения значений перемещений контролируемых точек непосредственно по приращениям измеренных величин, без вычисления координат контролируемых точек объекта. 2 ил.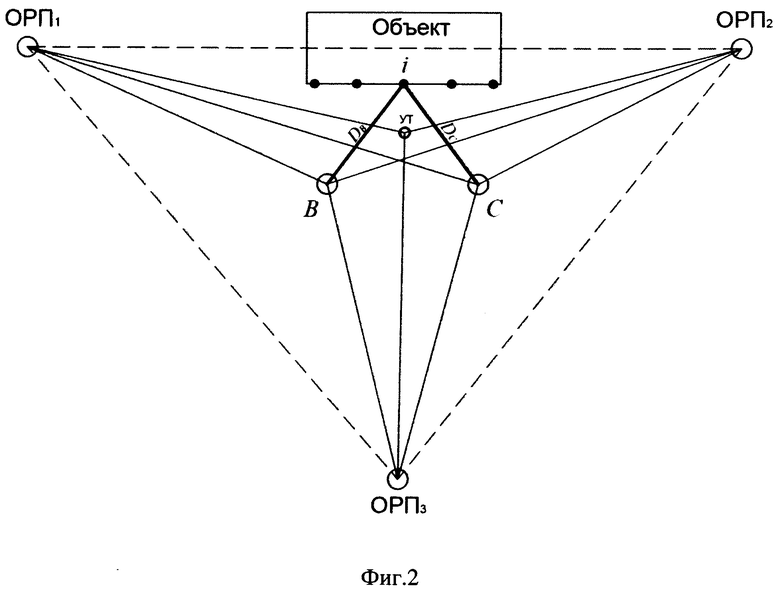
Способ прямой векторной засечки, включающий в себя установку угломерных приборов на местности, измерение углов и расстояний на контролируемые точки объекта, отличающийся тем, что на местности не создают опорную сеть в виде пунктов засечки с их последующей привязкой к пунктам государственной геодезической сети, угломерные приборы устанавливают внутри сети ориентирных пунктов вне центров пунктов в точках на местности, обеспечивающих выгоднейшие условия наблюдений, выполняют измерения углов и расстояний на контролируемые точки, ориентируют координатные оси посредством способа определения угла разворота лимба угломерного прибора, рассчитывают значения перемещений контролируемых точек непосредственно по приращениям измеренных величин, без вычисления координат контролируемых точек.
| СПОСОБ ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ТОЧЕК ОБЪЕКТА | 1991 |
|
RU2012853C1 |
| Способ создания пространственных ориентированных геодезических сетей | 1984 |
|
SU1216643A1 |
| Способ создания пространственно ориентированных сетей на архитектурных объектах | 1986 |
|
SU1456784A1 |
| CN 105424005 B, 03.04.2018. | |||

