Изобретение относится к области радиотехники и может быть использовано для синхронизации шкал времени пространственно разнесенных объектов с помощью радиотехнических средств связи, при этом наиболее эффективно при использовании в полярных широтах. Предполагаемое изобретение обеспечивает возможность синхронизации шкал времени с использованием метеорного радиоканала, так как физические особенности метеорного распространения радиоволн обеспечивают слабую чувствительность к ионосферным аномалиям полярных широт, что подтверждено теоретически и экспериментально [1, 2].
Заявителем проведен анализ уровня техники и выявлено несколько аналогичных предполагаемому изобретению технических решений. Далее более детально рассмотрены выявленные заявителем аналоги.
Известен [3] аналог согласно изобретению по а.с. СССР №479076 (кл. G04F 5/00) в котором предложен способ эталонного измерения отрезков времени, основанный на синхронизации пространственно-разнесенных генераторов системы единого времени с использованием метеорных радиоотражений при излучении сигналов станциями ведущего и ведомого генераторов, отличающийся тем, что, с целью уменьшения количества эксплуатируемых каналов связи и осуществления автоматической коррекции ведомого генератора, импульсы последнего излучаются с пропуском через один, принимают их на стороне ведущего генератора, переизлучают и одновременно за каждым переизлученным импульсом осуществляют посылку очередного импульса ведущего генератора, при этом на стороне ведомого генератора производят измерения временных интервалов между опорными и переизлученными импульсами этого генератора, а также между его опорными импульсами и принятым импульсом ведущего генератора.
Таким образом, общая идея аналога [3] состоит в том, что исключают использование дополнительных каналов связи для одновременной передачи меток времени при помощи временного разделения канала связи одной частоты. Техническим результатом аналога [3] является уменьшение эксплуатируемых каналов связи и возможность автоматической коррекции ведомого объекта синхронизации при помощи последовательного излучения импульсов временных меток ведущего и ведомого генераторов времени и частоты на каждой из сторон синхронизации. Синхронизацию ведомого объекта осуществляют путем коррекции его временной шкалы на основе полученных интервалов времени между опорным и излученным импульсами ведущего и ведомого объектов.
Недостатком известного способа [3] является необходимость обязательного наличия у ведомой и ведущей сторон генераторов времени и частоты, оснащенных соответствующей приемопередающей радиоаппаратурой, что усложняет устройство технических средств синхронизации, делает их менее компактными, более энергозатратными (что важно, например, при организации сети большого количества непосещаемых объектов), увеличивает их стоимость и сложность в эксплуатации. При этом из описания способа не ясно, какой точности синхронизации можно достигнуть и какое преимущество достигается в точности синхронизации, по сравнению с предшествующим уровнем техники.
Из исследованного уровня техники заявителем выявлено изобретение способ сличения шкал времени и устройство для его осуществления по а.с. СССР №1644079 (кл. G04C 11/02) [4], предназначенное для систем синхронизации шкал времени, использующих для передачи меток времени каналы связи с изменяющимся временем распространения сигналов. Одним из таких каналов является метеорный радиоканал.
Краткая сущность известного способа заключается в формировании в ведущем и ведомом пунктах сигналов основных, опорных и измерительных шкал времени с задержкой относительно исходной шкалы и синхронной передаче по радиоканалам полученных сигналов по очереди с последующим измерением временных задержек до и после переизлучения. Способ [4] отличается тем, что, с целью повышения точности синхронизации, определяют поправки к шкалам времени и производят фазовую коррекцию основной, опорной и измерительной шкал времени на величины этих поправок, осуществляют передачу и прием по радиоканалу в ведущем и ведомом пунктах первых поправок и регистрируют полученные временные интервалы задержек, снова обмениваются сигналами поправок и также осуществляют прием-передачу вторых дополнительных сигналов поправок.
Коррекцию шкал времени осуществляют по половине разности полученных поправок путем сдвига в сторону опережения корректируемых шкал времени ведущего и ведомого пунктов.
Достоинствами способа [4] является повышение точности синхронизации шкал времени и возможность синхронизации шкал без наличия эталонных часов.
Недостатком способа [4] является использование трех различных шкал времени и двух видов поправок, что усложняет устройство и протокол синхронизации. Ошибка на одном из этапов алгоритма синхронизации шкал времени вызовет ошибку синхронизации на обоих устройствах. Кроме того, аналог [4] также относится к классу активных способов синхронизации шкал времени, поэтому ему в той же степени присущи недостатки аналога [3].
Из исследованного уровня техники выявлен способ сверки пространственно разнесенных эталонов времени и частоты по патенту Украины №37929 (кл. G04G 7/02) [5], сущностью указанного способа заключается в использовании эталонных сигналов времени и частоты, которые передаются в составе сигнала телевизионного вещания, отличающийся тем, что прием телевизионного сигнала осуществляют по метеорному радиоканалу, а задержку его распространения определяют путем вычисления длины метеорной трассы с использованием географических координат пунктов передачи и приема и угловых координат метеорного следа.
Способ [5] основан на возможности определения точного положения отражающей точки на метеорном следе, т.е. ионизованной области метеорного следа, на которой происходит рассеяние переданного сигнала. Зная пространственные координаты отражающей точки, а также приемного и передающего пунктов, вычисляют пройденный радиоволной путь от передатчика к приемнику. Это позволяет исключить время распространения синхросигнала и тем самым повысить достижимую точность синхронизации до 50 мкс. Существенным недостатком аналога [5] является необходимость обязательного определения координат отражающей точки метеорного следа, для чего нужна дополнительная аппаратура (например, угломерное устройство, направленные и следящие антенные системы), что существенно усложняет техническую реализацию синхронизации и техническое сопровождение аппаратуры.
Ближайшим аналогом (прототипом) к предполагаемому изобретению по мнению заявителя является способ сверки пространственно разнесенных эталонов времени и частоты по патенту Украины №54198 (кл. G04G 7/00) [6], заключающийся в использовании эталонных сигналов времени и частоты, которые передают в составе сигнала телевизионного вещания и принимают по метеорному каналу, отличающийся тем, что длину метеорной трассы вычисляют с использованием данных о высоте метеорного следа, получаемых пассивным разностно-дальномерным методом в пункте приема. Это позволяет увеличить точность синхронизации до 10 мкс.
Для определения высоты используемого метеорного следа авторы [6] предлагают использовать данные от трех независимых приемных антенн. При этом измерения осуществляют по пассивному разностно-дальномерному методу [7]. В рамках способа-прототипа [6] решают задачу полуактивной синхронизации по фазе телевизионного сигнала, принимаемого в трех точках в результате рассеяния на конкретном метеорном следе.
Недостатком указанного способа [6] является необходимость большого количества приемо-передающей аппаратуры для его реализации, а именно: передатчика и трех приемников, которые должны быть расположены в ведомом пункте и на линии трассы распространения радиоволн для получения расстояний до отражающей точки метеорного следа.
Зная эти расстояния, геометрически вычисляют координаты отражающей точки на данном метеорном следе.
Такой метод существенно ограничивает возможность применения прототипа на практике и кроме того требует технологически сложной системы синхронизации, что также делает ее менее мобильной.
Заявляемое техническое решение направлено на достижение заявленной цели обеспечения синхронизации шкал времени по метеорному радиоканалу полуактивным способом без определения параметров используемого метеорного следа с возможностью сохранения предельной точности синхронизации шкал времени до десятков мкс., при этом заявленный способ должен обеспечить (более детально) возможность реализации следующих целей:
- синхронизации разнесенных часов в условиях отсутствия инфраструктуры;
- синхронизации разнесенных часов при отсутствии возможности точной синхронизации другими способами (например, в полярных широтах);
- синхронизации объектов, находящихся в пунктах приема, для которых важна скрытная передача информации с целью отсутствия возможности их обнаружения по ответному излучению (военные и режимные объекты).
Заявляемое техническое решение поясняется Фиг. 1, 2, 3, 4, 5.
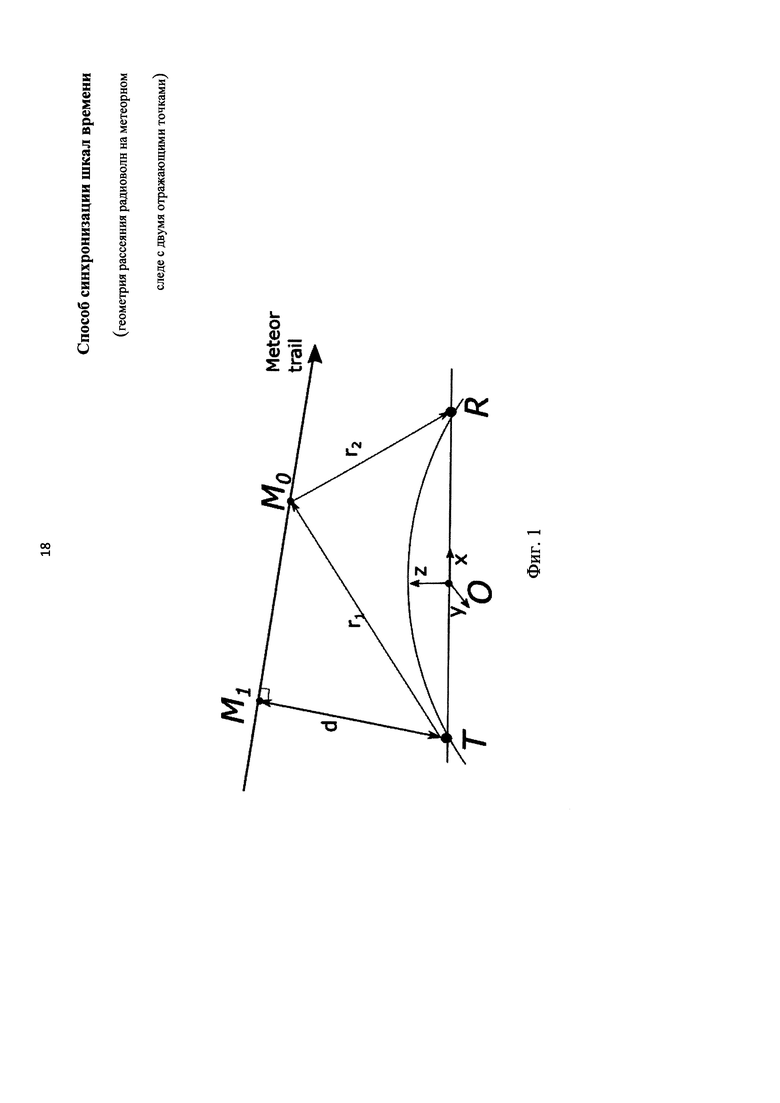
На Фиг. 1 представлена геометрия рассеяния радиоволн на метеорном следе с двумя отражающими точками в пункте дислокации ведомого генератора R и ведущего генератора Т.
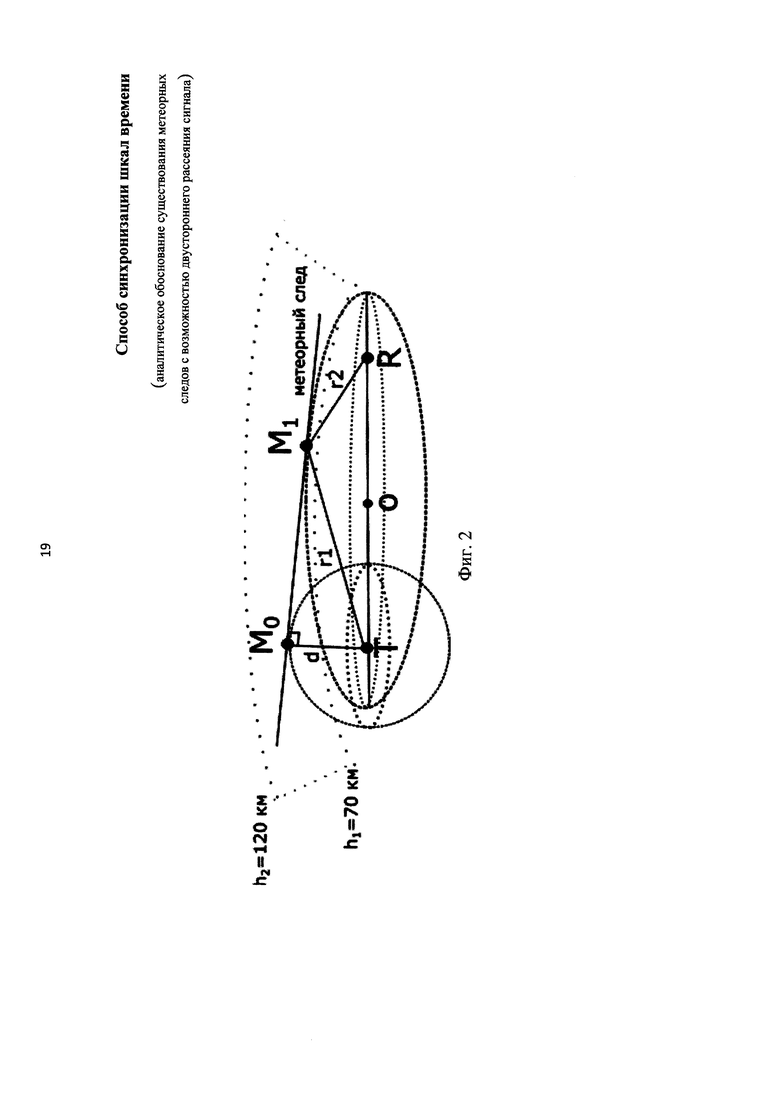
На Фиг. 2 представлено аналитическое обоснование существования метеорных следов с возможностью совместного рассеяния сигнала вперед, к ведомому генератору времени, и назад, к эталонному генератору времени.
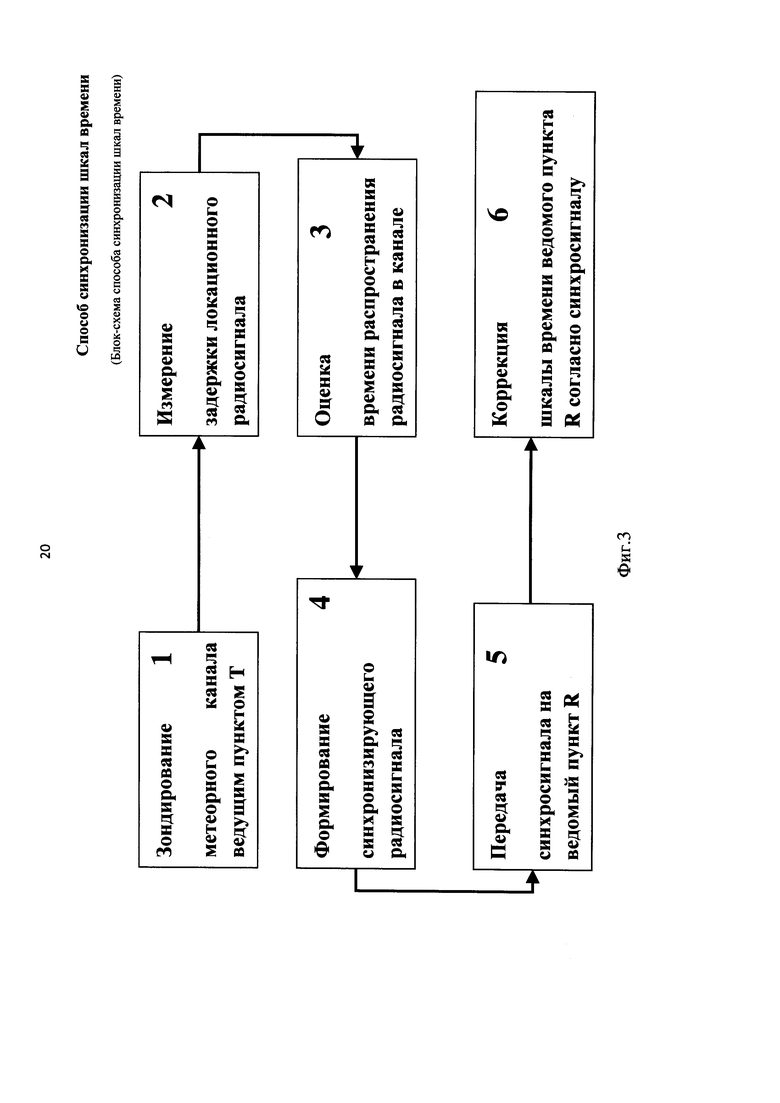
На Фиг. 3 представлена блок-схема заявленного способа синхронизации шкал времени.
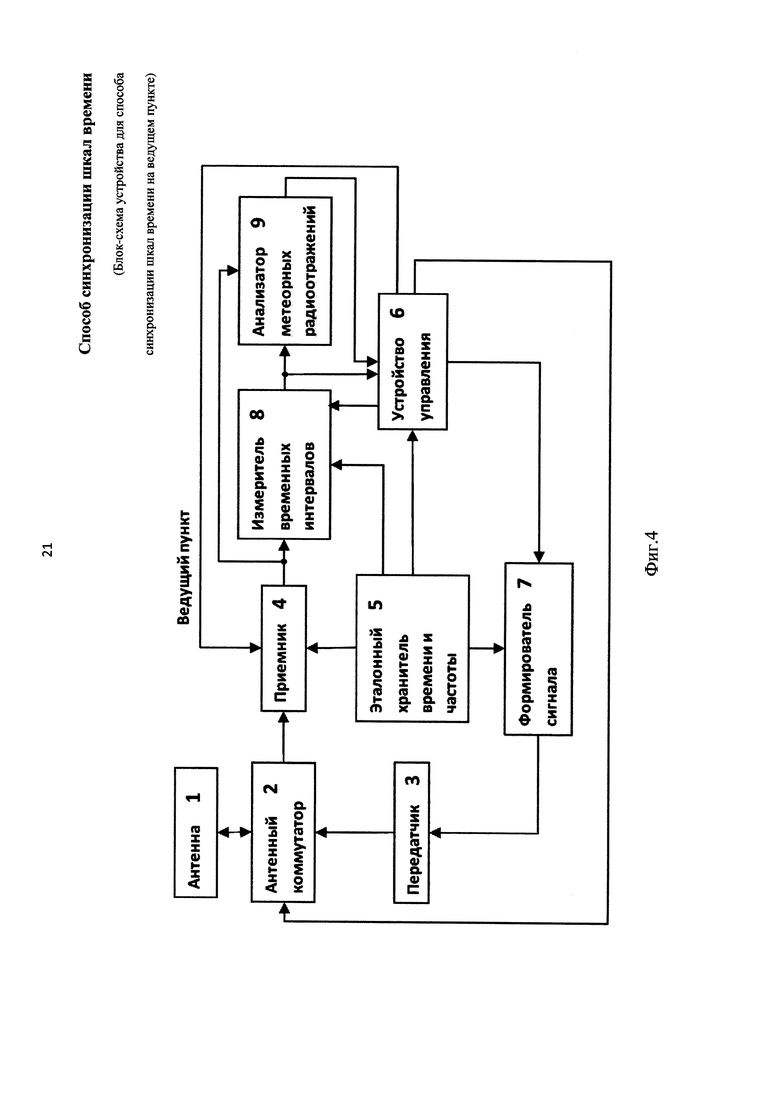
На Фиг. 4 представлена блок-схема устройства для способа синхронизации шкал времени на ведущем пункте.
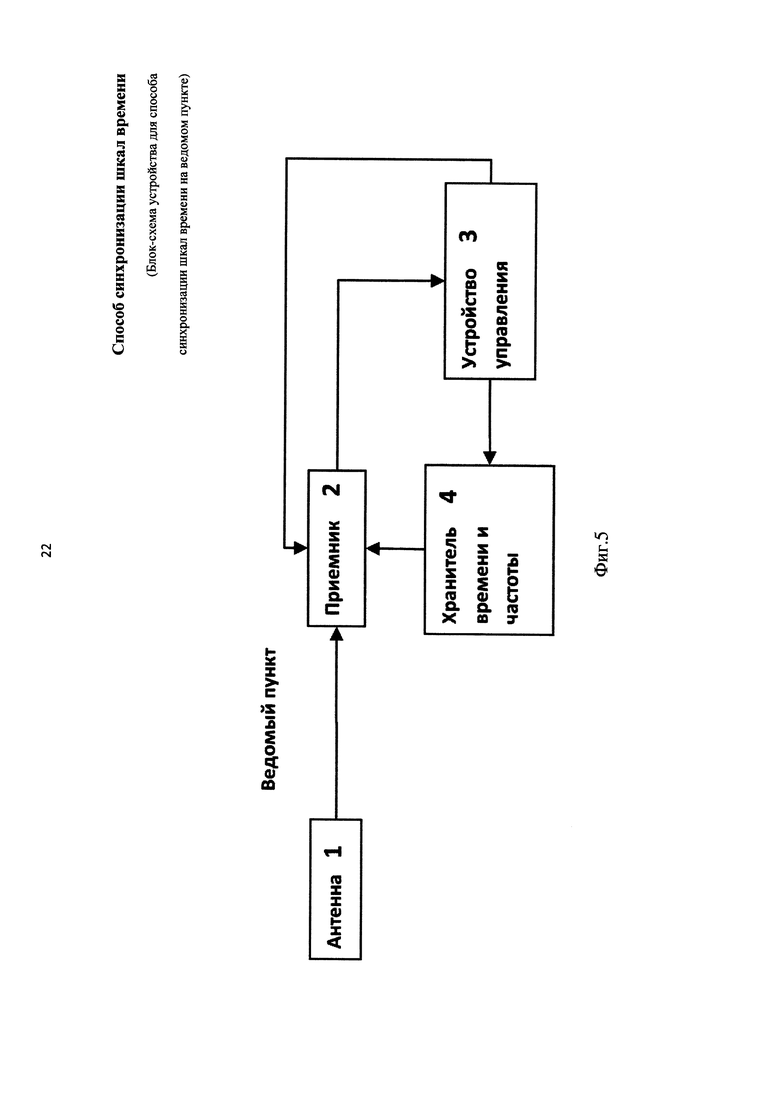
На Фиг. 5 представлена блок-схема устройства для способа синхронизации шкал времени на ведомом пункте.
Сущностью технического решения является способ синхронизации шкал времени, основанный на полу активном методе измерения сдвига шкал по меткам времени, передаваемым по метеорному радиоканалу, отличающийся тем, что метки времени передают по каналу, создаваемому метеорными следами, на которых происходит рассеяние сигнала, несущего информацию о метке времени, вперед, в точку приема, и назад, к приемнику эталонного генератора, что позволяет на основе оценки времени распространения сигнала в канале передачи данных, сформировать без использования дополнительных измерений синхронизирующую метку времени эталонного генератора с учетом задержки синхронизирующей метки в канале.
Промышленная реализуемость заявленного технического решения обосновывается следующими аналитическими соображениями. Из общих геометрических соображений известно [8], что при рассеянии радиоволны на метеорном следе в обратном направлении точка рассеяния (для простоты далее будем называть ее «отражающей точкой») должна принадлежать семейству концентрических сфер, в центре которых лежит передатчик. Конкретная сфера определяется условием ее касания метеорным следом в отражающей точке. Аналогично, при рассеянии радиоволны в прямом направлении отражающая точка должна принадлежать семейству конфокальных эллипсоидов, в фокусах которых расположены приемник и передатчик. Конкретный эллипсоид определяется условием его касания метеорным следом в отражающей точке. В рамках предлагаемого способа передатчиком является ведущий объект синхронизации - пункт Т. Пассивным приемником является ведомый объект синхронизации - пункт R.
На метеорной трассе любой длины и географического положения с определенной интенсивностью (интенсивность формирования зависит от параметров приемопередающей радиоаппаратуры, географического положения и геометрии радиолинии, от характеристик притока метеоров в атмосферу Земли в течение сеанса связи и от прочих факторов) формируются метеорные следы, обеспечивающие одновременно возможность рассеяния радиосигнала как в прямом, так и в обратном направлениях. Геометрически такие двусторонне рассеивающие метеорные следы являются касательными как к семейству концентрических сфер с центром в точке передачи Т, так и к семейству конфокальных эллипсоидов, в фокусах которых расположены пункты передачи T и приема R. Пример такого следа показан на Фиг. 2.
Геометрический критерий двусторонне рассеивающего метеорного следа является необходимым, но не достаточным условием технической реализации заявленного способа. Реализация способа требует соблюдения ряда дополнительных условий на параметры аппаратуры ведущего объекта синхронизации Т, определяемых физикой метеорных следов.
Во-первых, мощность радиоотражений от метеорных следов должна превосходить пороговый уровень, определяемый в соответствии с мощностью внутренних шумов в приемопередающем тракте, мощностью космических шумов и мощностью шумов иного природного и техногенного происхождения [8].
Во-вторых, антенны ведущего объекта синхронизации Т необходимо ориентировать таким образом, чтобы эффективно использовать наибольшее количество двусторонне рассеивающих метеорных следов, формирующихся на заданной трассе.
В качестве обоснования технической реализуемости предлагаемого способа приведем результаты имитационного моделирования тестовой радиолинии метеорной связи, полученные с использованием имитационной модели метеорных систем связи «КАМЕТ» [9]. В рамках модели «КАМЕТ» учитывается многолетняя статистика радарных наблюдений за интенсивностью притока метеорного вещества в атмосферу Земли, собранная с использованием метеорного радара Казанского университета. Тестовая радиолиния для реализации предложенного способа синхронизации имела следующие типичные для систем метеорной связи параметры:
- радиолиния Москва-Казань, протяженность - 720 км;
- эпоха сеанса связи - март, 6:00 по местному времени;
- мощность передатчика - 1000 Вт;
- несущая частота - 50 МГц;
- антенная система ведущего пункта связи - антенная решетка (2 ряда × 2 этажа), элемент антенной решетки - 5-элементный «волновой канал» горизонтальной поляризации;
- антенная система ведомого пункта связи - одиночный 5-элементный «волновой канал» горизонтальной поляризации;
- порог регистрации сигналов - 1 мкВ;
- тип модуляции синхронизирующего сигнала - двоичная фазовая манипуляция (BPSK) с полосой частот 9 КГц.
Согласно результатам имитационного моделирования при указанных выше параметрах, на тестовой радиолинии по статистике ежесуточно регистрируют не менее 20 двусторонне рассеивающих метеорных следов.
При оптимизации параметров аппаратуры регистрируемая численность двусторонне рассевающих метеорных следов может быть повышена на порядок и более. Таким образом, для типичной радиолинии метеорной связи обоснована возможность регистрации (с использованием промышленно доступной радиоаппаратуры) двусторонне рассеивающих метеорных следов, на которых базируется реализация предложенного способа. Далее перейдем непосредственно к раскрытию технической сущности предложенного способа синхронизации шкал времени.
Синхронизацию шкал времени согласно заявленному техническому решению осуществляют на основе полуактивного метода, т.е. метода с использованием одного излучающего источника, связанного с эталонными часами и располагающегося в пункте Т, который передает метку времени на пункт с ведомыми часами R. Канал передачи данных образуют метеорные следы, обеспечивающие возможность рассеяния сигнала как в прямом направлении передачи (в точку приема R), так и возможность рассеяния сигнала назад (в пункт T), как показано на Фиг. 1. Такие следы имеют для излучаемых сигналов две отражающие точки: точку М0, на которой происходит рассеяние сигнала в точку приема R, и точку M1, от которой происходит отражение сигнала обратно в точку передачи Т.
Метеорные следы с двусторонним рассеянием сигнала используют для исключения (из вносимой в ведомом пункте поправки) времени tP распространения сигнала с меткой точного времени в метеорном радиоканале. Указанное время распространения tP сигнала с меткой точного времени с достаточной для практического применения точностью определяют путем измерения времени распространения сигнала до метеорного следа локационным методом, т.е. по задержке приема возвратного сигнала, рассеянного следом в обратном направлении:

где  - оценка времени распространения tP, c - скорость света в вакууме (см. Фиг. 1).
- оценка времени распространения tP, c - скорость света в вакууме (см. Фиг. 1).
После этого оценку задержки на время распространения сигнала  включают в состав синхронизирующего сигнала и наряду с меткой времени передают на ведомый объект синхронизации (пункт R). При этом ошибка синхронизации δtC определяется только разницей между истинным временем распространения сигнала в метеорном радиоканале tP и его оценкой
включают в состав синхронизирующего сигнала и наряду с меткой времени передают на ведомый объект синхронизации (пункт R). При этом ошибка синхронизации δtC определяется только разницей между истинным временем распространения сигнала в метеорном радиоканале tP и его оценкой  согласно времени локации расстояния до метеорного следа 2d0/c:
согласно времени локации расстояния до метеорного следа 2d0/c:

Согласно Фиг. 1, погрешность синхронизации δtc→0 при M1→M0.
Предлагаемый способ осуществляют, например, следующим образом. Предположим, имеются пункты с пространственно-разнесенными часами, синхронность которых требуется обеспечить. Пусть в пункте Т находятся эталонные часы, а в пункте R - ведомые часы. Передачу временных меток осуществляют по метеорному радиоканалу полуактивным методом (излучающим является только ведущий пункт). Ведущий пункт Т может излучать в эфир два типа сигналов: зондирующие сигналы и синхронизирующие сигналы. Поясним назначение и порядок передачи указанных типов сигналов.
Зондирующие сигналы используют для установления факта формирования метеорного следа и доступности метеорного радиоканала для последующей передачи синхронизирующего сигнала. После обнаружения метеорного следа, зондирующий сигнал используют для оценки задержки на время распространения сигнала в метеорном канале  согласно времени локации до метеорного следа. В качестве зондирующих сигналов могут быть использованы, например, радиоимпульсы большой длительности с немодулированным заполнением. Ведущий пункт Т с периодичностью τз испускает в эфир зондирующие сигналы. После излучения каждого зондирующего сигнала ведущий пункт Т на интервале времени t∈[0, τз) ожидает прихода отраженной от метеорного следа копии, которая должна превосходить заданный порог регистрации. В случае обнаружения отраженного сигнала замеряют его задержку относительно момента излучения, которую далее используют в качестве оценки времени распространения сигнала в метеорном канале
согласно времени локации до метеорного следа. В качестве зондирующих сигналов могут быть использованы, например, радиоимпульсы большой длительности с немодулированным заполнением. Ведущий пункт Т с периодичностью τз испускает в эфир зондирующие сигналы. После излучения каждого зондирующего сигнала ведущий пункт Т на интервале времени t∈[0, τз) ожидает прихода отраженной от метеорного следа копии, которая должна превосходить заданный порог регистрации. В случае обнаружения отраженного сигнала замеряют его задержку относительно момента излучения, которую далее используют в качестве оценки времени распространения сигнала в метеорном канале  После этого на ведущем пункте T запускают процедуру формирования метки времени и дальнейшие операции по синхронизации. Период зондирования τз выбирают исходя из максимально возможной дальности распространения сигнала на заданной метеорной трассе: τЗ>r1max+r2max.
После этого на ведущем пункте T запускают процедуру формирования метки времени и дальнейшие операции по синхронизации. Период зондирования τз выбирают исходя из максимально возможной дальности распространения сигнала на заданной метеорной трассе: τЗ>r1max+r2max.
Зондирующие сигналы от ведущего пункта Т могут быть приняты и ведомым пунктом R. В случае приема зондирующего сигнала ведомый пункт R их игнорирует и не предпринимает никаких действий по коррекции своей шкалы времени.
Синхронизирующие сигналы содержат в себе метку времени с учетом поправки на задержку распространения сигнала в метеорном радиоканале. Для формирования синхронизирующих сигналов могут использовать любые методы цифровой модуляции, например, многопозиционную фазовую (MPSK) либо частотную манипуляцию (MFSK).
Условно реализацию предлагаемого способа синхронизации можно разделить на следующие этапы (Фиг. 3):
1. В ведущем пункте T производят обнаружение метеорного следа путем регулярного излучения зондирующего сигнала.
2. После обнаружения метеорного следа в ведущем пункте Т измеряют задержку отраженного от него сигнала.
3. В ведущем пункте Т формируют оценку времени распространения сигнала в метеорном канале  используя в качестве этой оценки измеренную на этапе 2 задержку отраженного от метеорного следа сигнала.
используя в качестве этой оценки измеренную на этапе 2 задержку отраженного от метеорного следа сигнала.
4. В ведущем пункте Т формируют метку точного времени путем опережающего сдвига эталонной шкалы на оценку времени распространения сигнала в метеорном канале  Метку точного времени далее подвергают модуляции, чем формируют синхронизирующий сигнал.
Метку точного времени далее подвергают модуляции, чем формируют синхронизирующий сигнал.
5. Передают синхронизирующий сигнал на ведомый объект по метеорному радиоканалу, образованному двусторонне рассеивающим метеорным следом.
6. Ведомый объект синхронизации (пункт R) принимает синхронизирующий сигнал, демодулирует его, извлекает метку точного времени и вносит поправку в свою шкалу. Этим устраняют текущий уход шкалы времени ведомого объекта синхронизации от эталонной шкалы, чем достигают заявленную цель синхронизации шкал времени.
Предлагаемый способ синхронизации может быть реализован, например, с использованием устройств, функциональные блок-схемы которых представлены на Фиг. 4 (размещается в ведущем пункте T) и на Фиг. 5 (размещается в ведомом пункте R).
Устройство синхронизации ведущего пункта Т (см. Фиг. 4) содержит антенну 1, антенный коммутатор 2, передатчик 3, приемник 4, эталонный хранитель времени и частоты 5 (ЭХВЧ), устройство управления 6 (УУ), формирователь сигнала 7, измеритель временных интервалов 8 (ИВИ), анализатор метеорных радиоотражений 9 (АМРО). Антенна 1 электрически соединена с антенным коммутатором 2, который электрически соединяется с передатчиком 3, приемником 4 и принимает сигнал управления «режим приема/передачи» от УУ 6. Передатчик 3 электрически соединен с антенным коммутатором 2 и формирователем сигнала 7. Приемник 4 электрически соединен с антенным коммутатором 2, с ИВИ 8 и АМРО 9. На приемник 4 также поступает опорный сигнал от ЭХВЧ 5, а также управляющие сигналы конфигурирования параметров приема (содержат информацию о пороговом уровне регистрации, параметрах демодуляции и декодирования и т.д.) от УУ 6. Эталонный хранитель времени и частоты 5 генерирует опорный сигнал и сигналы внутренней синхронизации блоков устройства. ЭХВЧ 5 электрически соединен с приемником 4, с УУ 6, с формирователем сигнала 7, с ИВИ 8. Устройство управления 6 электрически соединено с антенным коммутатором 2, с ЭХВЧ 5, с формирователем сигнала 7, с ИВИ 8 (двумя проводными линиями), а также с АМРО 9. Технически, УУ 6 может быть реализовано, например, на основе микроконтроллера или микропроцессора с пакетом специально разработанных управляющих программ. Формирователь сигнала 7 электрически соединен с передатчиком 3, с ЭХВЧ 5 и УУ 6. Измеритель временных интервалов 8 электрически соединен с приемником 4, с ЭХВЧ 5, с УУ 6 (двумя проводными линиями), а также с АМРО 9. По одной (из двух) проводной линии ИВИ 8 передает на УУ 6 результат измерения временного интервала, а по второй линии - принимает от УУ 6 команду на начало отсчета интервала времени. Технически, ИВИ 8 может быть реализован, например, на основе цифрового счетчика, подсчитывающего количество тактовых импульсов от ЭХВЧ 5, укладывающихся в измеряемый промежуток времени. Анализатор метеорных радиоотражений 9 электрически связан с приемником 4, с УУ 6 и ИВИ 8. Технически, АМРО 9 может быть реализован, например, на основе платы программируемой логической интегральной схемы (ПЛИС).
Устройство синхронизации ведомого пункта R (см. Фиг. 5) содержит антенну 1, приемник 2, устройство управления 3 и хранитель времени и частоты 4 (ХВЧ). Антенна 1 электрически соединена с приемником 2, который электрически соединен с устройством управления 3. Кроме того, на приемник 2 поступает опорный сигнал от ХВЧ 4, а также управляющие сигналы конфигурирования параметров приема (содержат информацию о пороговом уровне регистрации, параметрах демодуляции и декодирования и т.д.) от устройства управления 3. Устройство управления 3 электрически соединено с приемником 2 двумя проводными линиями (по одной линии на устройство управления 3 поступают информационные сигналы от приемника 2, а по второй - от устройства управления 3 поступают управляющие сигналы на приемник 2) и с ХВЧ 4. Хранитель времени и частоты 4 генерирует опорный сигнал и сигналы внутренней синхронизации блоков устройства. ХВЧ 4 электрически соединен с приемником 2 и с устройством управления 3.
Рассмотрим возможную реализацию предлагаемого способа синхронизации с использованием устройств синхронизации ведущего и ведомого пунктов связи, блок-схемы которых представлены, соответственно, на Фиг. 4 и Фиг. 5. Цель синхронизации состоит в привязке шкалы времени хранителя времени и частоты 3 в ведомом пункте R к шкале эталонного хранителя времени и частоты 5 ведущего пункта Т с приемлемой для практического применения точностью.
Предлагаемый способ синхронизации шкал времени осуществляют, например, следующим образом. УУ 6 ведущего пункта Т задает программу реализации всех основных этапов предлагаемого способа синхронизации. С заданной периодичностью τз УУ 6 формирует команды на генерацию и передачу зондирующего сигнала. Эти команды поступают на антенный коммутатор 2, формирователь сигнала 7 и на ИВИ 8. При этом УУ 6 настраивает антенный коммутатор 2 на режим передачи сигналов, а также задает для ИВИ 8 начальный момент отсчета временного интервала (начальный момент отсчета может быть задан УУ 6 с учетом возможной задержки сигнала в приемном тракте). По полученной от УУ 6 команде формирователь сигнала 7 генерирует на основе опорной частоты ЭХВЧ 5 зондирующий сигнал с заданными УУ 6 длительностью и частотой. Сгенерированный зондирующий сигнал поступает в передатчик 3, где его усиливают до необходимой мощности. С выхода передатчика 3 зондирующий сигнал через антенный коммутатор 2 поступает на антенну 1, в результате чего его излучают в ионосферу. По окончании передачи зондирующего сигнала УУ 6 переводит антенный коммутатор 2 в режим приема сигнала.
Отразившись от какой-либо неоднородности в ионосфере (это необязательно метеорный след), возвратный зондирующий сигнал принимают с помощью антенны 1. Через антенный коммутатор 2 возвратный зондирующий сигнал поступает на приемник 4, где его детектируют и сравнивают с заданным порогом регистрации. Если принятый сигнал выше установленного порога, то с выхода приемника 4 он далее поступает на ИВИ 8 и АМРО 9. При этом ИВИ 8 измеряет задержку времени  возвратного сигнала относительно начала отсчета времени. Результат измерения задержки
возвратного сигнала относительно начала отсчета времени. Результат измерения задержки  поступает с ИВИ 8 на УУ 6 и АМРО 9. В анализаторе метеорных радиоотражений 9 определяют тип принятого радиоотражения с учетом поступившего от ИВИ 8 измерения
поступает с ИВИ 8 на УУ 6 и АМРО 9. В анализаторе метеорных радиоотражений 9 определяют тип принятого радиоотражения с учетом поступившего от ИВИ 8 измерения  временной задержки. Если обнаруженное радиоотражение является метеорным, то АМРО 9 передает на УУ 6 положительный признак, в противном случае - негативный признак.
временной задержки. Если обнаруженное радиоотражение является метеорным, то АМРО 9 передает на УУ 6 положительный признак, в противном случае - негативный признак.
При получении негативного признака УУ 6 инициирует новый цикл периодического излучения зондирующего сигнала. При получении положительного признака УУ 6 принимает решение о формировании и передаче эталонной метки времени посредством обнаруженного метеорного следа. Для этого УУ 6 считывает с ЭХВЧ 5 текущую метку времени и сдвигает ее вперед на измеренную ранее величину  Этим формируют эталонную метку времени. Кроме того, УУ 6 может опережающим образом сдвигать эталонную метку на возможную задержку синхронизирующего сигнала в передающем тракте.
Этим формируют эталонную метку времени. Кроме того, УУ 6 может опережающим образом сдвигать эталонную метку на возможную задержку синхронизирующего сигнала в передающем тракте.
После этого УУ 6 инициирует режим формирования и передачи синхронизирующего сигнала посредством подачи соответствующих управляющих сигналов на антенный коммутатор 2 и формирователь сигнала 7. При этом УУ 6 настраивает антенный коммутатор 2 на режим передачи сигналов. Формирователь сигнала 7 по поступившей от УУ 6 команде, в которой содержится информации об эталонной метке времени, на основе опорной частоты от ЭХВЧ 5 формирует синхронизирующий сигнал на рабочей частоте, осуществляет кодирование и модуляцию сигнала. Синхронизирующий сигнал далее поступает на передатчик 3, где его усиливают до необходимой мощности. С выхода передатчика 3 зондирующий сигнал через антенный коммутатор 2 поступает на антенну 1, в результате чего его передают в метеорный радиоканал.
По окончании передачи синхронизирующего сигнала УУ 6 ведущего пункта Т инициирует новый цикл периодического излучения зондирующего сигнала.
Рассмотрим реализацию этапов предлагаемого способа синхронизации в ведомом пункте R. С помощью антенны 1 ведомого пункта R принимают синхронизирующий сигнал, в котором заключена эталонная метка времени. Принятый сигнал детектируют в приемнике 2 и сравнивают его с заданным порогом регистрации. Если принятый сигнал превосходит заданный порог, то его демодулируют и декодируют. Извлеченная из принятого сигнала информация поступает с приемника 2 на устройство управления 3. Устройство управления 3 анализирует преамбулу и, в случае обнаружения признаков синхронизирующего сигнала, извлекает информацию об эталонной метке времени. Устройство управления 3 может корректировать полученную эталонную метку на возможную задержку сигнала в приемном тракте. После этого устройство управления 3, с учетом эталонной метки времени, формирует команду коррекции шкалы времени для ХВЧ 4. По полученной от устройства управления 3 команде ХВЧ 4 корректирует свою шкалу времени, чем осуществляют синхронизацию шкал времени ведомого и ведущего пунктов связи, т.е. добиваются целевого технического результата. На этом единичный цикл синхронизации шкал времени считают успешно завершенным.
Предлагаемый способ, по сравнению с прототипом, упрощает алгоритм синхронизации пространственно разнесенных часов, а также предоставляет возможность работы без двустороннего излучения, что упрощает аппаратуру синхронизации и позволяет решать проблемы передачи меток времени без использования дополнительных измерений для определения параметров радиоканала.
Предлагаемый способ обеспечивает возможность реализации следующих целей:
- синхронизация разнесенных часов в условиях отсутствия инфраструктуры;
- синхронизация разнесенных часов при отсутствии возможности точной синхронизации другими способами (например, в полярных широтах);
- синхронизация объектов, находящихся в пунктах приема, для которых важна скрытная передача информации с целью отсутствия возможности их обнаружения по ответному излучению (военные и режимные объекты).
Предполагаемое изобретение удовлетворяет критериям новизны, так как при определении уровня техники не обнаружено средство, которому присущи признаки, идентичные всем признакам, перечисленным в формуле изобретения, включая характеристику назначения.
Предлагаемый способ имеет изобретательский уровень, поскольку не выявлены технические решения, имеющие признаки, совпадающие с отличительными признаками данного изобретения, и не установлена известность влияния отличительных признаков на заявленный технический результат.
Заявленное техническое решение можно реализовать в промышленности посредством использования известных стандартных устройств и способов, например: приемо-передающей аппаратуры KB, хранителей времени и стандартов частоты, синтезаторов частот, способов определения временного положения сигнала в радиоканале, набора микропроцессоров и стандартных элементов цифровой логики (регистров, сигнальных процессоров, микросхем памяти и т.д.), и соответствует критерию «промышленная применимость», предъявляемому к изобретениям.
Использованные источники
1. J. Ostergaard, J.A. Weitzen, Е. Li, D.М. Haines, G.S. Sales, HF/VHF radiowave techniques for investigating high latitude ionospheric disturbances, Final report, University of Lowell, April 1991.
2. Akira Fukuda, Kaiji Mukumoto, Yasuaki Yoshihiro, Masauji Nagasawa, Hisao Yamagishi, Natsuo Sato, Huigen Yang, Ming Wu Yao, Experiments on meteor burst communications in the Antarctic, Final report, Adv. Polar Upper Atmos. Res., 17, 120-136, 2003.
3. Наумочкин В.Ф., Шестаков Ю.И. Способ эталонного измерения отрезков времени // Авторское свидетельство на изобретение №479076. Опубликовано 30.07.1975 Бюл. №28.
4. Бавыкина В.В., Моисеев В.И. Способ сличения шкал времени и устройство для его осуществления // Авторское свидетельство на изобретение №1644079. Опубликовано 23.04.1991 Бюл. №15.
5. Антипов И.Е., Коваль Ю.А., Нестеренко Г.В., Трощин О.Л. Способ сверки пространственно-разнесенных эталонов времени и частоты // Патент Украины на изобретение №37929. Опубликовано 15.05.2001 Бюл. №4.
6. Антипов И.Е., Коваль Ю.А., Бавыкина В.В., Нестеренко Г.В. Способ сверки эталонов времени и частоты, расположенных в различных точках пространства // Патент Украины на изобретение №54198. Опубликовано 17.02.2003 Бюл. №2.
7. Караваев В.В., Сазонов В.В. Статистическая теория пассивной локации. - М.: Радио и связь, 1987. - 240 с.
8. Мак-Кинли, Д. Методы метеорной астрономии [Текст]: [пер. с англ.] / Д. Мак-Кинли. - М.: Мир, 1964. - 383 с.
9. A. Karpov, "The computer model "KAMET": The new generation version," Proc. Meteroids 2001 Conf., pp. 367-370, Kiruna (Sweden), 6-10 Aug, 2001.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ИНФОРМАЦИИ В МЕТЕОРНОМ РАДИОКАНАЛЕ ПУТЕМ ШИФРОВАНИЯ СЛУЧАЙНЫМ ПРИРОДНЫМ ПРОЦЕССОМ | 2004 |
|
RU2265957C1 |
| СПОСОБ ЗАЩИТЫ ИНФОРМАЦИИ | 2007 |
|
RU2370898C2 |
| СПОСОБ И СИСТЕМА СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ РАЗНЕСЕННЫХ В ПРОСТРАНСТВЕ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ | 2024 |
|
RU2830997C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ СИГНАЛОВ ТОЧНОГО ЕДИНОГО ВРЕМЕНИ (ТЕВ) ПО ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ И СИСТЕМА РАСПРЕДЕЛЕНИЯ СИГНАЛОВ ТОЧНОГО ЕДИНОГО ВРЕМЕНИ | 2008 |
|
RU2381538C1 |
| Способ повышения достоверности передаваемой радиосигналом информации | 2020 |
|
RU2744105C1 |
| Способ сличения шкал времени | 1977 |
|
SU712807A1 |
| СПОСОБ ЗАЩИТЫ ИНФОРМАЦИИ | 2008 |
|
RU2423800C2 |
| СПОСОБ ЗАЩИТЫ ИНФОРМАЦИИ | 2012 |
|
RU2527734C2 |
| Способ синхронизации корабельных гидроакустических станций | 2019 |
|
RU2726934C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2080646C1 |
Изобретение относится к области радиотехники и может быть использовано для создания систем синхронизации шкал времени пространственно-разнесенных объектов. Техническим результатом изобретения является сокращение объема измерений при синхронизации шкал времени пространственно-разнесенных хранителей времени и частоты по метеорному радиоканалу. Результат достигают использованием для создания канала передачи данных о точном времени метеорных следов, одновременно рассеивающих сигнал вперед, к пункту ведомого хранителя частоты и времени, и отражающих сигнал назад, к пункту эталонного хранителя. Сущность способа синхронизации составляют следующие операции. Метки времени передают по каналу, создаваемому метеорными следами, на которых происходит рассеяние сигнала, несущего информацию о метке времени, вперед, в точку приема, и назад, к приемнику эталонного генератора, что позволяет на основе оценки времени распространения сигнала в канале передачи данных сформировать синхронизирующую метку времени эталонного генератора с учетом задержки синхронизирующей метки в канале без использования дополнительных измерений. 5 ил.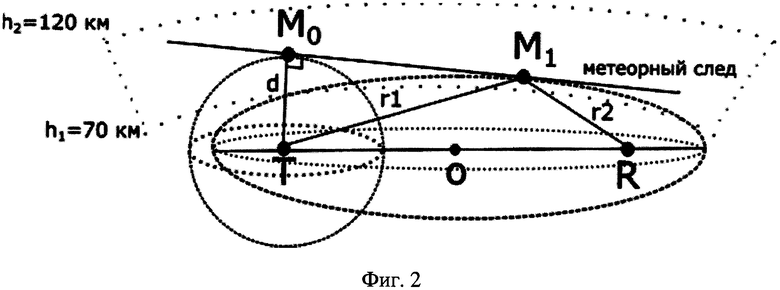
Способ синхронизации шкал времени, основанный на полуактивном методе измерения сдвига шкал по меткам времени, передаваемым по метеорному радиоканалу, отличающийся тем, что метки времени передают по каналу, создаваемому метеорными следами, на которых происходит рассеяние сигнала, несущего информацию о метке времени, вперед, в точку приема, и назад, к приемнику эталонного генератора, что позволяет на основе оценки времени распространения сигнала в канале передачи данных сформировать без использования дополнительных измерений синхронизирующую метку времени эталонного генератора с учетом задержки синхронизирующей метки в канале.
| Способ синхронизации пространственно разнесенных шкал времени при передаче дополнительной информации и устройство для его осуществления | 1990 |
|
SU1808135A3 |
| СПОСОБ ЗАЩИТЫ ИНФОРМАЦИИ | 2007 |
|
RU2370898C2 |
| US 5119500 A1, 02.06.1992 | |||
| US 4685149 A1, 04.08.1987. | |||

