Варианты осуществления настоящего изобретения относятся к приемопередатчику, SUDAC (также упоминаемому как совместно используемый распределенный антенный компонент стороны пользовательского оборудования) и системе, содержащей приемопередатчик и SUDAC. Дополнительные варианты осуществления относятся к способам для обработки сигналов в приемопередатчике или в SUDAC. Предпочтительные варианты осуществления относятся к концепции синхронизации для SUDAS (совместно используемой распределенной антенной системы стороны пользовательского оборудования).
SUDAS является системой, содержащей, по меньшей мере, один ретранслятор. В стандартных ретрансляционных сетях усиления и пересылки (AF), ретранслируемый сигнал (передаваемый от ретрансляционного узла) обычно располагается в том же диапазоне несущей частоты, что и исходный сигнал (передаваемый от узла источника). Для ретрансляторов предполагаются ортогональные каналы, где предполагается мультиплексирование с временным разделением (TDM), мультиплексирование с частотным разделением (FDM) или мультиплексирование с кодовым разделением (CDM). Данные пилот-сигнала (также называемые данные обучения или опорные данные), обеспечиваемые внутри данных полезной нагрузки, являются обычно достаточными для синхронизации и общей оценки в используемом диапазоне несущей частоты и относящихся поддиапазонах. Вследствие рассмотрения того же частотного диапазона для передачи, структура пилот-сигнала (передаваемая узлом источника) может оптимизироваться для ретрансляционных систем AF по отношению к канальным состояниям наихудшего случая и применяемым способам канальной оценки в узле назначения, ср. [9] [10]. Это не имеет место для значительного частотного преобразования во время передачи и пересылки сигналов.
Например, в [8] предложена конструкция матрицы пилот-сигналов, где для ретрансляционной системы AF идентифицируется составной канал от узла источника в ретрансляционный узел и ретрансляционного узла в узел назначения. Однако предполагаются одинаковые медленно изменяющиеся во времени характеристики обоих каналов вследствие передачи в одном и том же частотном диапазоне. Вот почему набор разных матриц пилот-сигналов (= унитарные матрицы перестановки поднесущих, применяемые в ретрансляционном узле) может применяться при предположении, что оба канала являются квазипостоянными. Узел назначения использует знание этого набора, чтобы оценивать оба канала.
При заданной структуре сигнала, куда включаются поля данных пилот-сигналов, широко известны и применяются способы для оценки канала передачи или частотного смещения (несущей) из этих полей пилот-сигналов, ср. [3] и [6]. Эти оценки имеют место для временного-частотного-кодового-пространственного (t-f-c-s) ресурса, где располагаются поля пилот-сигналов. Дополнительно, факт наличия взаимности беспроводного канала является широко известным и часто используется, например, в [7], где предполагается идеальная информация состояния канала.
В [11] рассматриваются схемы синхронизации и канальной оценки в ретрансляционных системах OFDM/OFDMA, где различие делается между прозрачными и кооперативными ретрансляционными системами, поддерживающими основанную на OFDM систему мобильной сети. Прозрачный ретранслятор означает, что пользовательское оборудование не может определить, приняло ли пользовательское оборудование сигнал от базовой станции или от ретранслятора. Однако кооперативные ретрансляторы взаимодействуют с базовой станцией и пользовательским оборудованием, где специальный акцент здесь дается на пространственно-временном (блочном) кодировании и пространственно-частотном (блочном) кодировании.
В [11] данные пилот-сигнала внутри ретранслируемого сигнала полезной нагрузки могут напрямую использоваться для канальной оценки и синхронизации. Дополнительно, [11] использует оценку задержки распространения между разными линиями связи передачи, например, между прямой линией связи и двумя ретрансляционными линиями связи также компенсацию разных задержек для более точной канальной оценки. Хотя не указано в [11], это работает только при условии, что задержки находятся в пределах циклического префикса символа OFDM, чтобы избегать помех между символами (ISI) и помех между несущими (ICI).
[11] дополнительно использует сохраненные смещения несущей и временные смещения из более ранней оценки, для чего предложена идентификация устройства передатчика для корректного поиска в таблице и компенсации смещения. Эта таблица может поддерживаться обновляемой. Это является очень существенным для кооперативной системы в [11], так как все устройства (базовая станция, ретрансляторы, пользовательские оборудования) совместно используют одни и те же ресурсы t-f-c-s.
В [12] раскрывается конкретный способ канальной оценки, называемый сжатое распознавание, для двусторонней ретрансляционной сети. На основе очень конкретной последовательности обучения, гауссовской случайной последовательности обучения, которая передается каждым пользовательским терминалом, осуществляется итеративная канальная оценка. Таким образом, этот способ действует хорошо только совместно с применением гауссовской случайной последовательности обучения.
[13] показывает обмен ошибками канальной оценки в двусторонней ретрансляционной системе MIMO с использованием итеративного алгоритма, при этом дополнительная задержка формируется за счет обмена ошибками канальной оценки.
В [14] рассматривается ретрансляционный узел обработки MIMO, то есть, с множеством входных и выходных антенн, в то время как узлы источника и назначения имеют только одиночную антенну. В этой односторонней ретрансляционной системе, узлы источника и ретрансляционные узлы передают последовательности обучения в ретрансляционный узел и узел назначения принимает последовательность обучения от узла источника и ретранслятора, что является прямым способом измерять все присутствующие линии связи. Ретрансляционный узел осуществляет канальную оценку также как вычисление матрицы обработки сигналов MIMO ретрансляции и матрицы приема для узлов назначения посредством итеративного алгоритма. Подход из [14] не может решать указанную проблему быстро изменяющегося со временем канала вследствие сильной задержки, вводимой временем сходимости производного алгоритма, и вследствие ухудшений очень вероятно устаревшей передачи по обратной связи канальных оценок от узлов назначения.
Все из вышеупомянутых концепций имеют в общем, что эффекты, такие как доплеровский сдвиг или другие канальные искажения, увеличиваются вследствие использования ретрансляционных станций и предполагается, что демонстрируют аналогичные характеристики. Это из-за того, что в этих концепциях не учитывается значительное частотное преобразование, которое изменяет характеристики.
Поэтому, имеется необходимость в улучшенном подходе.
Задачей является обеспечить концепцию, избегающую вышеописанных недостатков. Эта задача решается посредством сущности независимых пунктов формулы изобретения.
Согласно первому варианту осуществления, приемопередатчик пользовательского оборудования содержит каскад приема, модуль канальной оценки интерфейсной стороны, модуль канальной корректировки интерфейсной стороны, модуль канальной оценки серверной стороны, и модуль канальной корректировки серверной стороны. Каскад приема сконфигурирован с возможностью принимать входящий сигнал от SUDAC, который обеспечивает возможность ретрансляционной передачи данных, содержащей передачу данных интерфейсной стороны с использованием крайне высоких частот и передачу данных серверной стороны с использованием ультравысоких частот. Входящий сигнал содержит часть данных, часть управления серверной стороны и часть управления интерфейсной стороны, при этом часть управления интерфейсной стороны содержит сигнал оценки интерфейсной стороны и сигнал конфигурации. Модуль канальной оценки интерфейсной стороны сконфигурирован с возможностью выполнять канальную оценку на основе сигнала оценки интерфейсной стороны, при этом модуль канальной корректировки интерфейсной стороны сконфигурирован с возможностью корректировать искажения, вызываемые посредством использования крайне высоких частот, на основе канальной оценки модуля канальной оценки интерфейсной стороны. Модуль канальной оценки серверной стороны сконфигурирован с возможностью выполнять канальную оценку на основе части управления серверной стороны, при этом модуль канальной корректировки серверной стороны сконфигурирован с возможностью корректировать искажения, вызываемые посредством использования ультравысоких частот, на основе канальной оценки модуля канальной оценки серверной стороны.
Принципы, здесь раскрытые, основываются на фундаментальной идее, что система, использующая два эфирных интерфейса, соединенные последовательно для передачи данных, содержит средство для компенсации эффектов искажений, вызываемых первым и вторым эфирным интерфейсом. Таким образом, варианты осуществления настоящего изобретения содержат двухкаскадный подход, чтобы обнаруживать/оценивать и/или компенсировать искажения, вызываемые в первом и втором эфирном интерфейсе, например, двухкаскадный подход для канальной оценки или двухкаскадный подход для оценки частотного смещения. Признак сигнал оценки может указывать на данные обучения для явной/прямой оценки и он может указывать на информацию/данные полезной нагрузки для неявной/косвенной оценки посредством использования свойств информации/данных полезной нагрузки. Эти два случая оценки обозначаются в литературе как оценка с помощью данных и без помощи данных. И оценка может содержать получение оценок и параметров, чтобы улучшать синхронизацию и, поэтому, качество сигнала. Например, канальная оценка обеспечивает модуль корректировки канальными оценками, чтобы уменьшать искажения канала передачи. Отметим дополнительно, что использование ультравысоких частот или крайне высоких частот может указывать на несущие частоты.
Согласно дополнительным вариантам осуществления, приемопередатчик содержит каскад передачи, модуль предварительной канальной оценки интерфейсной стороны, и модуль предварительной канальной оценки серверной стороны. Модуль предварительной канальной оценки интерфейсной стороны сконфигурирован с возможностью вычислять канальные коэффициенты интерфейсной стороны, чтобы выполнять предварительную канальную оценку, чтобы предварительно компенсировать искажения, которые будут вызываться посредством использования крайне высоких частот, на основе сигнала оценки интерфейсной стороны. Модуль предварительной канальной оценки серверной стороны сконфигурирован с возможностью вычислять канальные коэффициенты серверной стороны, чтобы выполнять канальную оценку на основе части управления серверной стороны, чтобы уменьшать искажения, которые будут вызываться посредством использования ультравысоких частот. Используя эти (предварительные) оценки, варианты осуществления показывают каскад передачи, сконфигурированный с возможностью передавать канальные характеристики интерфейсной стороны и/или серверной стороны и/или относящиеся к каналу интерфейсной стороны и/или серверной стороны параметры и/или относящиеся к обработке сигналов интерфейсной стороны и/или серверной стороны параметры в SUDAC, чтобы удаленным образом управлять обработкой сигналов в SUDAC. Этот вариант осуществления может быть подходящим для сетей мобильной связи TDD (дуплексирования с временным разделением), где одна и та же несущая частота серверной стороны используется для восходящей линии связи и нисходящей линии связи. Другими словами, канальная взаимность может быть предпочтительной для этого варианта осуществления.
Варианты осуществления показывают приемопередатчик, содержащий каскад прямого приема, сконфигурированный с возможностью напрямую принимать сигнал от базовой станции, при этом общий модуль канальной оценки серверной стороны сконфигурирован с возможностью выполнять комбинированную канальную оценку на основе множества частей управления серверной стороны и сигнала, принятого напрямую от базовой станции. Это является предпочтительным, так как, дополнительно, приемопередатчик является способным принимать сигнал напрямую от базовой станции, который не ретранслируется компонентом SUDAC.
Дополнительные варианты осуществления показывают SUDAC, содержащий приемопередатчик серверной стороны, приемопередатчик интерфейсной стороны, и генератор сигналов оценки. Приемопередатчик серверной стороны сконфигурирован с возможностью принимать входящий сигнал от базовой станции с использованием ультравысоких частот, при этом приемопередатчик серверной стороны сконфигурирован с возможностью выводить входящий сигнал на промежуточных частотах. Генератор сигналов оценки сконфигурирован с возможностью генерировать часть управления интерфейсной стороны, содержащую сигнал оценки интерфейсной стороны и сигнал управления. Дополнительно, приемопередатчик интерфейсной стороны сконфигурирован с возможностью генерировать исходящий сигнал с использованием крайне высоких частот, содержащий входящий сигнал и часть управления интерфейсной стороны, и передавать исходящий сигнал и сигнал части управления интерфейсной стороны в пользовательское оборудование. Этот вариант осуществления может указывать на SUDAC с ретрансляцией сигналов, включающей в себя частотное преобразование.
Дополнительные варианты осуществления показывают SUDAC, содержащий приемопередатчик интерфейсной стороны, приемопередатчик серверной стороны, и модуль канальной корректировки серверной стороны. Приемопередатчик серверной стороны сконфигурирован с возможностью принимать входящий сигнал от базовой станции с использованием ультравысоких частот и сконфигурирован с возможностью выводить входящий сигнал на промежуточных частотах. Модуль канальной корректировки серверной стороны сконфигурирован с возможностью уменьшать во входящем сигнале искажения, вызываемые посредством использования ультравысоких частот, с использованием сигнала конфигурации, принятого от модуля канальной оценки серверной стороны пользовательского оборудования посредством приемопередатчика интерфейсной стороны. Приемопередатчик интерфейсной стороны сконфигурирован с возможностью выводить входящий сигнал с использованием крайне высоких частот, чтобы генерировать исходящий сигнал и передавать исходящий сигнал в пользовательское оборудование. Дополнительно или альтернативно, приемопередатчик интерфейсной стороны сконфигурирован с возможностью принимать сигнал конфигурации от пользовательского оборудования и пересылать сигнал конфигурации в модуль канальной корректировки серверной стороны.
Один дополнительный вариант осуществления показывает SUDAC, содержащий модуль предварительной канальной корректировки интерфейсной стороны, который сконфигурирован с возможностью предварительно корректировать исходящий сигнал, чтобы уменьшать искажения, которые будут вызываться посредством использования крайне высоких частот, на основе сигнала конфигурации, принятого от модуля канальной оценки интерфейсной стороны пользовательского оборудования.
Другие варианты осуществления показывают приемопередатчик интерфейсной стороны компонента SUDAC, содержащий модуль оценки частоты интерфейсной стороны, сконфигурированный с возможностью выполнять оценку частоты интерфейсной стороны на основе части управления интерфейсной стороны. Модуль компенсации частоты интерфейсной стороны сконфигурирован с возможностью выполнять компенсацию частотного смещения интерфейсной стороны входящего и/или исходящего сигнала интерфейсной стороны на основе оценки. Дополнительно или альтернативно, приемопередатчик серверной стороны содержит модуль оценки частоты серверной стороны, сконфигурированный с возможностью выполнять оценку частоты серверной стороны на основе части управления серверной стороны. Модуль компенсации частоты серверной стороны сконфигурирован с возможностью выполнять компенсацию частотного смещения серверной стороны входящего и/или исходящего сигнала серверной стороны на основе оценки.
Дополнительные варианты осуществления показывают SUDAC, содержащий модуль канальной оценки интерфейсной стороны и модуль канальной корректировки интерфейсной стороны, при этом модуль канальной оценки интерфейсной стороны сконфигурирован с возможностью выполнять канальную оценку на основе сигнала оценки интерфейсной стороны, и при этом модуль канальной корректировки интерфейсной стороны сконфигурирован с возможностью корректировать искажения, вызываемые посредством использования крайне высоких частот, на основе канальной оценки модуля канальной оценки интерфейсной стороны.
Согласно дополнительным вариантам осуществления, обеспечивается система, содержащая приемопередатчик и SUDAC, при этом SUDAC и приемопередатчик устанавливают линию связи передачи данных с использованием каскадов приема и передачи приемопередатчика и приемопередатчика интерфейсной стороны компонента SUDAC. Дополнительно, SUDAC и приемопередатчик устанавливают адаптивную к аппаратному обеспечению и/или среде временную синхронизацию, при этом временная синхронизация содержит, по меньшей мере, один эталон синхронизации, с использованием внешнего, общего временного эталона или синхронизации, при этом приемопередатчик отправляет свой текущий эталон тактового сигнала с использованием сигнала синхронизации интерфейсной стороны или серверной стороны.
Согласно дополнительным вариантам осуществления, обеспечиваются способы для обработки сигналов в приемопередатчике и SUDAC. Способы выполняются посредством использования пользовательского оборудования и/или SUDAC. Согласно одному варианту осуществления, обеспечивается компьютерная программа для этого способа.
Варианты осуществления настоящего изобретения будут описываться далее со ссылкой на содержащиеся чертежи, на которых:
Фиг. 1 показывает схематический общий вид линий связи между SUDAC, пользовательским оборудованием и базовой станцией;
Фиг. 2 показывает схематический общий вид перемещающегося пользовательского оборудования по отношению к трем компонентам SUDAC;
Фиг. 3 показывает схематический общий вид приемопередатчика пользовательского оборудования и его линий связи передачи данных;
Фиг. 4 показывает схематический общий вид приемопередатчика пользовательского оборудования и его блоков обработки;
Фиг. 5 показывает схематический общий вид компонента SUDAC согласно одному варианту осуществления;
Фиг. 6 показывает схематический общий вид компонента SUDAC согласно одному варианту осуществления.
Фиг. 7 показывает схематический общий вид компонента SUDAC согласно одному варианту осуществления.
Фиг. 8 показывает схематический общий вид системы, содержащей приемопередатчик пользовательского оборудования и SUDAC;
Фиг. 9 показывает схематическую блок-схему способа для обработки сигналов в приемопередатчике;
Фиг. 10 показывает схематическую блок-схему способа для обработки сигналов в SUDAC;
Фиг. 11 показывает схематическую блок-схему способа для обработки сигналов в SUDAC;
Фиг. 12A показывает схематическую диаграмму базовой станции и пользовательского оборудования, при этом каждое имеет три антенны, описывающие общую передачу данных 3×3 MIMO;
Фиг. 12В показывает схематическую диаграмму базовой станции, двух компонентов SUDAC и пользовательского оборудования в режиме передачи данных 3×3;
Фиг. 12С показывает схематическую диаграмму базовой станции, SUDAC, содержащий две приемные антенны, SUDAC, содержащий одну приемную антенну, и пользовательское оборудование, содержащее одну приемную антенну, в режиме передачи данных 3×4.
Фиг. 13А показывает схематические спектры передачи трех компонентов SUDAC, которые визуализированы по отношению к частоте  ;
;
Фиг. 13В показывает иллюстративные спектры передачи несинхронизированной передачи с двумя маяками в диапазоне 60G посредством трех компонентов SUDAC;
Фиг. 14 показывает иллюстративный спектр передачи блоков сигналов с множеством маяков в диапазоне 60G посредством одного SUDAC;
Фиг. 15 показывает иллюстративный спектр передачи блоков сигналов с маяками суперпозиции в диапазоне 60G посредством одного SUDAC;
Фиг. 16 показывает иллюстративную высокоуровневую структуру маякового сигнала, указывающую поля пилот-сигналов и поля для данных управления и конфигурации в режиме TDD (дуплексирования с временным разделением);
Фиг. 17 показывает иллюстративную высокоуровневую структуру маякового сигнала, указывающую поля пилот-сигналов и поля для данных управления и конфигурации в режиме FDD (дуплексирования с частотным разделением);
Фиг. 18 показывает изображение, сравнимое с изображением из фиг. 16, где дополнительно показаны оценки доплеровского сдвига интерфейсной стороны  -
- и комплексные канальные коэффициенты
и комплексные канальные коэффициенты  , выведенные из двух иллюстративных маяковых сигналов от одного SUDAC;
, выведенные из двух иллюстративных маяковых сигналов от одного SUDAC;
Фиг. 19 показывает иллюстративную объединенную обработку полей пилот-сигналов из двух маяковых сигналов, где структура полей пилот-сигналов выровнена в маяковом сигнале 1 и 2;
Фиг. 20 показывает иллюстративные маяковые сигналы одного SUDAC, обслуживающего один ретрансляционный путь нисходящей линии связи и один ретрансляционный путь восходящей линии связи в режиме дуплексирования с частотным разделением (FDD);
Фиг. 21 показывает маяковые сигналы одного SUDAC, обслуживающего один ретрансляционный путь для нисходящей линии связи и восходящей линии связи в режиме дуплексирования с временным разделением (TDD);
Фиг. 22 показывает схематическую блок-схему блоков обработки сигналов в пользовательском оборудовании для осуществления связи с компонентами SUDAC;
Фиг. 23 показывает схематическую блок-схему блоков обработки сигналов в пользовательском оборудовании для осуществления связи с тремя компонентами SUDAC.
Фиг. 24А показывает схематическую блок-схему блоков обработки сигналов для обработки сжатых сигналов в пользовательском оборудовании и SUDAC;
Фиг. 24В показывает схематическую блок-схему блоков обработки сигналов для обработки сжатых сигналов в пользовательском оборудовании и SUDAC;
Фиг. 24С показывает схематическую блок-схему блоков обработки сигналов для обработки сжатых сигналов в пользовательском оборудовании и SUDAC;
Фиг. 24D показывает схематическую блок-схему блоков обработки сигналов для обработки сжатых сигналов в пользовательском оборудовании и SUDAC;
Фиг. 24E показывает схематическую блок-схему блоков обработки сигналов для обработки сжатых сигналов в пользовательском оборудовании и SUDAC;
Фиг. 25 показывает схематический частотный спектр ретранслируемого сигнала, где целевой сигнал полезной нагрузки имеет более малую полосу пропускания, чем ретрансляционная полоса пропускания для ретрансляции сигналов нисходящей линии связи и/или восходящей линии связи;
Фиг. 26 показывает схематический частотный спектр совместно используемого ретрансляционного канала внутри одной и той же ретрансляционной полосы пропускания, который имеет место для ретрансляции сигналов нисходящей линии связи и восходящей линии связи;
Фиг. 27 показывает схематические частотные спектры обработки пяти поддиапазонов сигналов серверной стороны, которые вставлены в пять частей данных интерфейсной стороны в интерфейсной стороне; и
Фиг. 28 показывает схематическую сетку 3D, показывающую потери/ухудшение в дБ вследствие фазового шума и ошибки канальной оценки в зависимости от длины поля пилот-сигнала и SNR (отношения сигнала к шуму) ( ).
).
Ниже, будут подробно описываться варианты осуществления настоящего изобретения, при этом идентичные ссылочные позиции обеспечиваются для объектов, имеющих идентичные или аналогичные функции, так что их описание является взаимозаменяемым или взаимно применимым.
БАЗОВЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
В совместно используемой распределенной антенной системе стороны пользовательского оборудования (SUDAS), как предложено в [1], ретранслируемый сигнал полезной нагрузки в частотном диапазоне 60 ГГц (60G) (миллиметровых волн) имеет недостаточные средства для адекватной канальной оценки и синхронизации, так как волновая форма сигнала полезной нагрузки предназначена для передачи в частотном диапазоне суб-6 ГГц (s6G). Сигнал полезной нагрузки является ретранслируемым сигналом посредством SUDAS от базовой станции в пользовательское оборудование или наоборот, означая нисходящую линию связи или восходящую линию связи, соответственно. Поэтому, для SUDAS предложена новая концепция канальной оценки и синхронизации, которая является подходящей, чтобы справляться с быстро изменяющимися канальными характеристиками или канальными состояниями и потенциально большими частотными смещениями в диапазоне 60 ГГц, которые также ухудшают ретранслируемый сигнал полезной нагрузки. Описываемая ниже схема обеспечивает надежную передачу ретранслируемых сигналов полезной нагрузки и сигналов состояния/управления SUDAS.
Предусматривается установка системы автономных ретрансляционных антенн (SUDAS), которые действуют как спутники или ретрансляторы для пользовательского оборудования (UE). Такая сформированная распределенная антенная система, которая состоит из одного или более совместно используемых распределенных антенных компонентов стороны пользовательского оборудования (SUDAC), является ключом для использования способов MIMO, которые отпирают ворота к ультрабыстрым передачам данных между пользовательским оборудованием (UE) и базовой станцией (BS) системы мобильной связи. Другими словами, строится ретрансляционная сеть в смысле виртуальной антенной решетки, содержащая преобразование входящего сигнала в исходящую частоту с более высокой или более низкой частотой, дополнительно содержащая канальную оценку и синхронизацию для обеих частей канала передачи. Можно думать о стационарной и мобильной SUDAS, при этом стационарные компоненты SUDAC могут устанавливаться в доме и мобильные компоненты SUDAC могут устанавливаться, например, в автомобиле или общественном транспорте (например, автобусе/поезде). В последующем, фиг. 1-8 показывают аппаратные компоненты, фиг. 9-11 способы для обработки сигналов в аппаратных компонентах, фиг. 12A-C вводят схемы обработки MIMO для передачи данных, и начиная с фиг. 13 будут описываться схемы генерирования и обработки сигналов.
Базовая станция (как узел источника) может передавать также структуру пилот-сигнала, подходящую для частотного диапазона 1 (например, s6G) и диапазона 2 (например, 60G), которая будет ретранслироваться вместе с полезной нагрузкой. Однако служебная информация в частотном диапазоне s6G будет слишком огромной, так что это не будет использоваться в каком-либо новом стандарте мобильной связи. Дополнительно, не предполагается модифицировать структуру пилот-сигнала для сигнала полезной нагрузки s6G в SUDAC, так как стандартизация сетей мобильной связи может быть уже законченной, или также как в вариантах осуществления, SUDAC не знает о структуре сигнала полезной нагрузки s6G.
Фиг. 1 показывает схематический общий вид линий связи между SUDAC 30, пользовательским оборудованием 10 и базовой станцией 70. Согласно одному варианту осуществления, рассматриваемая инфраструктура передачи данных описана в [1].
Как изображено на фиг. 1, линия связи между SUDAC 30 и базовой станцией 70 называется линией 75a связи серверной стороны, содержащей передачу данных серверной стороны. Линия связи серверной стороны использует частотный диапазон 1, который для текущих мобильных систем работает в частотной области ниже 6 ГГц (s6G). Другая линия 75b связи серверной стороны является линией связи между пользовательским оборудованием 10 и базовой станцией 70. Эта линия 75b связи серверной стороны может быть обычно используемым путем передачи данных между пользовательским оборудованием 10 и базовой станцией 70. Эта линия 75b связи серверной стороны будет поддерживаться или расширяться посредством использования ретранслируемой передачи через линию 75a связи серверной стороны и линию 80 связи интерфейсной стороны, чтобы улучшать устойчивость или точность передачи и/или чтобы увеличивать скорость передачи данных. Линия 80 связи интерфейсной стороны называется передачей между пользовательским оборудованием 10 и SUDAC 30, которая передается в частотном диапазоне миллиметровых волн (диапазоне 2), чтобы обеспечивать возможность высоких скоростей передачи данных для малых дальностей, в основном передач линии видимости (LOS). Линия 80 связи интерфейсной стороны содержит передачу интерфейсной стороны. С точки зрения системы обе линии связи являются двунаправленными и как пара строят одиночную ретрансляционную линию связи. Одиночный SUDAC 30 включает в себя одну или множество независимых ретрансляционных линий связи. Направление линии связи от пользовательского оборудования 10 в SUDAC 30 и от SUDAC 30 в базовую станцию 70 обозначается как восходящая линия связи, другое направление обозначается как нисходящая линия связи.
Фиг. 2 показывает схематический общий вид перемещающегося пользовательского оборудования 10 по отношению к трем компонентам SUDAC 30a, 30b, 30c. Перемещение пользовательского оборудования 10 оценивается в трех положениях, где в положении 1 пользовательское оборудование 10 имеет соединение линии видимости с компонентами SUDAC 30a и 30b, в положении 2 пользовательское оборудование 10 имеет соединение линии видимости с компонентами SUDAC 30a, 30b и 30c, и в положении 3 пользовательское оборудование 10 имеет соединение линии видимости с компонентами SUDAC 30a и 30c. В положении 1 и положении 3 либо SUDAC 30b, либо 30c скрыт за стеной.
Так как система полагается на передачи LOS в линии связи интерфейсной стороны, является очевидным, что компоновка сети может не быть статичной для портативного пользовательского оборудования 10. При перемещении, пользовательское оборудование постоянно обнаруживает новые компоненты SUDAC 30a-c при потере видимости других компонентов SUDAC, как показано на фиг. 2. Даже если не имеется никакого изменения в количестве доступных компонентов SUDAC, может изменяться канал передачи. Таким образом, для этих передачи и приема по двум диапазонам (пользовательских оборудований 10 и компонентов SUDAC 30) является предпочтительным применять новую схему канальной оценки и синхронизации, например, с использованием подходящих структур данных маяка и пилот-сигнала. В общем, линия связи серверной стороны является наиболее ограниченным ресурсом и совместно используется между разными базовыми станциями и другими пользовательскими оборудованиями, тогда как линия связи интерфейсной стороны совместно используется между разными пользовательскими оборудованиями 10 и компонентами SUDAC 30. Компоненты SUDAC 30 осуществляют ретрансляцию между диапазонами и будут подробно описываться в следующем разделе.
Фиг. 3 показывает базовый приемопередатчик 5 пользовательского оборудования 10. Более сложный подход показан на фиг. 22 и 23. Пользовательское оборудование 10 является, например, мобильным телефоном, компьютером, или устройством "Интернета вещей". Приемопередатчик 5 содержит каскад 15 приема, модуль 20 канальной оценки интерфейсной стороны, модуль 21 канальной корректировки интерфейсной стороны, модуль 22 канальной оценки серверной стороны, и модуль 23 канальной корректировки серверной стороны. Каскад 15 приема сконфигурирован с возможностью принимать входящий сигнал 25 от SUDAC 30, который обеспечивает возможность ретрансляционной передачи данных, содержащей передачу данных интерфейсной стороны с использованием крайне высоких частот (например, в диапазоне 60 ГГц) и передачу данных серверной стороны с использованием ультравысоких частот (например, в диапазоне s6G). Ультравысокие частоты могут находиться в диапазоне суб-6 ГГц (s6G), тогда как крайне высокие частоты могут находиться в диапазоне 60 ГГц (60G). Входящий сигнал 25 содержит часть 35 данных, часть 50 управления серверной стороны, и часть 40 управления интерфейсной стороны, при этом часть управления интерфейсной стороны содержит сигнал 45 оценки интерфейсной стороны и сигнал 46 конфигурации. Часть 35 данных входящего сигнала 25 может быть сигналом полезной нагрузки или частью сигнала полезной нагрузки и часть 40 управления интерфейсной стороны может быть маяковым сигналом, содержащим одно или более полей данных пилот-сигналов (сигнал 45 оценки интерфейсной стороны) и одно или более полей 46 сигнала конфигурации. Маяк является обычно каналом управления в диапазоне 60G, содержащим информацию о SUDAS, ее конфигурации, и данные пилот-сигнала (также упоминаемые как пилот-сигналы или опорные данные). Часть 50 управления серверной стороны может содержать одно или более полей данных пилот-сигналов согласно применяемой волновой форме передачи данных серверной стороны, например, определенной в стандарте сети мобильной связи, например, часть сигнала полезной нагрузки, содержащую известные данные, используемые для канальной оценки в передаче данных серверной стороны, например, с использованием общего канала управления. Отметим, что части (40 и 50) управления интерфейсной стороны и серверной стороны могут содержать в этом варианте осуществления явные данные пилот-сигнала (предназначенные для синхронизации с помощью данных). Однако свойства сигнала для данных 46 управления также как части 35 данных также могут оцениваться для синхронизации (без помощи данных). Для ясности, последующее описание ссылается на первый случай без исключения второго случая потенциально расширенной оценки.
Модуль 20 канальной оценки интерфейсной стороны сконфигурирован с возможностью выполнять канальную оценку на основе сигнала 45 оценки интерфейсной стороны, чтобы уменьшать искажения, вызываемые посредством использования крайне высоких частот. Модуль 21 канальной корректировки интерфейсной стороны сконфигурирован с возможностью корректировать искажения, вызываемые посредством использования крайне высоких частот, на основе канальной оценки модуля 20 канальной оценки интерфейсной стороны. Дополнительно, модуль 22 канальной оценки серверной стороны сконфигурирован с возможностью выполнять канальную оценку на основе части 50 управления серверной стороны, чтобы уменьшать искажения, вызываемые посредством использования ультравысоких частот. Модуль 23 канальной корректировки серверной стороны сконфигурирован с возможностью корректировать искажения, вызываемые посредством использования ультравысоких частот, на основе канальной оценки модуля 22 канальной оценки серверной стороны.
Приемопередатчик 5 может дополнительно содержать двухкаскадную оценку частотного смещения и компенсацию, например, чтобы вычислять и компенсировать доплеровские сдвиги. Канальная оценка будет подробно описываться на фиг. 4. Фактические схемы обработки сигналов будут описываться в дополнительных разделах.
Как указано посредством фиг. 4, дополнительные варианты осуществления показывают приемопередатчик 5, содержащий множество каскадов 15 приема, общий модуль 22 канальной оценки серверной стороны для множества каскадов 15 приема, и общий модуль 23 канальной корректировки серверной стороны для множества каскадов 15 приема, обеспечивая возможность приемопередатчику 5 пользовательского оборудования 10 использовать режим передачи MIMO. Общий модуль 22 канальной оценки серверной стороны сконфигурирован с возможностью выполнять комбинированную канальную оценку на основе множества частей 50 управления серверной стороны. Дополнительно, общий модуль 23 канальной корректировки серверной стороны сконфигурирован с возможностью выполнять комбинированную канальную корректировку на основе результатов комбинированной канальной оценки. Дополнительно, приемопередатчик 5 может содержать каскад 16 прямого приема, сконфигурированный с возможностью напрямую принимать сигнал от базовой станции 70. Поэтому, общий модуль 22 канальной оценки серверной стороны сконфигурирован с возможностью выполнять комбинированную канальную оценку на основе множества частей 50 управления серверной стороны и сигнала, принятого напрямую от базовой станции.
Другой вариант осуществления показывает приемопередатчик 5, содержащий модуль 17 оценки частоты интерфейсной стороны, сконфигурированный с возможностью выполнять оценку частоты интерфейсной стороны на основе части 40 управления интерфейсной стороны, и модуль 18 компенсации частоты интерфейсной стороны, сконфигурированный с возможностью выполнять компенсацию частотного смещения интерфейсной стороны на основе оценки. Оценка может выполняться с использованием модуля 17 оценки частоты интерфейсной стороны.
Другой вариант осуществления показывает приемопередатчик 5, содержащий модуль 19 оценки частоты серверной стороны, сконфигурированный с возможностью выполнять оценку частоты серверной стороны на основе части 50 управления серверной стороны, и модуль 24 компенсации частоты серверной стороны, сконфигурированный с возможностью выполнять компенсацию частотного смещения серверной стороны на основе оценки. Оценка может выполняться с использованием модуля 24 оценки частоты интерфейсной стороны.
Согласно дополнительным вариантам осуществления, приемопередатчик 5 может содержать каскад 55 передачи и модуль 65 предварительной канальной оценки интерфейсной стороны. Модуль 65 предварительной канальной оценки интерфейсной стороны сконфигурирован с возможностью вычислять канальные коэффициенты интерфейсной стороны, чтобы выполнять предварительную канальную оценку, чтобы предварительно компенсировать искажения, которые будут вызываться посредством использования крайне высоких частот, на основе сигнала 45 оценки интерфейсной стороны. Дополнительно, приемопередатчик 5 может содержать модуль 66 предварительной канальной оценки серверной стороны, который сконфигурирован с возможностью вычислять канальные коэффициенты серверной стороны, чтобы выполнять канальную оценку на основе части 50 управления серверной стороны, чтобы уменьшать искажения, которые будут вызываться посредством использования ультравысоких частот.
Другой вариант осуществления показывает каскад 55 передачи, который сконфигурирован с возможностью передавать канальные характеристики интерфейсной стороны и/или серверной стороны и/или относящиеся к каналу интерфейсной стороны и/или серверной стороны параметры и/или относящиеся к обработке сигналов интерфейсной стороны и/или серверной стороны параметры в SUDAC 30, чтобы удаленным образом управлять обработкой сигналов в SUDAC 30. Этот вариант осуществления может быть подходящим для сетей мобильной связи TDD (дуплексирования с временным разделением), где одна и та же несущая частота серверной стороны используется для восходящей линии связи и нисходящей линии связи. Другими словами, канальная взаимность может быть предпочтительной для этого варианта осуществления. Поэтому, модуль 65 предварительной канальной оценки может оценивать, по меньшей мере, одну ранее принятую часть 40, 50 управления интерфейсной стороны и серверной стороны для предварительной компенсации исходящего сигнала. Отметим, что в этом варианте осуществления используется наличие взаимности ретрансляционного канала. Эта предварительная оценка и предварительная компенсация исходящего сигнала 60, например, выполняется приемопередатчиком 5.
Другой вариант осуществления описывает часть 35 данных и часть 40 управления интерфейсной стороны сигнала крайне высокой частоты как передающиеся с использованием разной несущей частоты, и/или с использованием разной структуры кода и/или с использованием разного временного слота. Дополнительно, часть 35 данных и часть 50 управления серверной стороны сигнала ультравысокой частоты передается с использованием разной несущей частоты, и/или с использованием разной структуры кода данных и/или с использованием разного временного слота. Другими словами, часть 35 данных и часть 40 управления интерфейсной стороны сигнала крайне высокой частоты, подлежащие передаче, отличаются друг от друга в отношении несущей частоты, структуры кода и/или временного слота. Дополнительно, часть 35 данных и часть 50 управления серверной стороны сигнала ультравысокой частоты, подлежащие передаче, отличаются друг от друга в отношении несущей частоты, структуры кода и/или временного слота. Входящий сигнал 25 может дополнительно содержать дополнительную часть 42 управления интерфейсной стороны, имеющую другую несущую частоту по сравнению с частью 40 управления интерфейсной стороны и/или являющуюся сдвинутой во времени по сравнению с частью (40) управления интерфейсной стороны. Дополнительно, часть 40 управления интерфейсной стороны и дополнительная часть 42 управления интерфейсной стороны выровнены во времени и имеют разные несущие частоты, чтобы улучшать устойчивость или точность интерполяции между дополнительными, последующими сигналами 45 оценки интерфейсной стороны вследствие объединенной обработки части 40 управления интерфейсной стороны и дополнительной части 42 управления интерфейсной стороны. Согласно этому варианту осуществления, используется, по меньшей мере, один сигнал оценки интерфейсной стороны, в то время как разные канальные состояния или структуры сигналов (серверной стороны или интерфейсной стороны) могут использовать более, чем один сигнал оценки интерфейсной стороны. Схемы обработки сигналов будут описываться в дополнительных разделах. В общем, следует принять во внимание, что передача данных интерфейсной стороны может мультиплексироваться с использованием множественного доступа с временным разделением каналов (TDMA), множественного доступа с частотным разделением каналов (FDMA), множественного доступа с кодовым разделением каналов (CDMA), множественного доступа с пространственным разделением каналов (SDMA), или любого другого подходящего способа мультиплексирования.
Другие варианты осуществления показывают приемопередатчик 5, содержащий сигнальный процессор 68, который сконфигурирован с возможностью вычислять параметры обработки сигналов, чтобы передавать параметры обработки сигналов в SUDAC 30. SUDAC 30 может использовать параметры обработки сигналов, чтобы обрабатывать или кодировать, например, входящий сигнал 25, так что входящий сигнал может, например, передаваться с уменьшенной полосой пропускания или в более короткий период времени, то есть, входящий сигнал может передаваться сжатым по крайне высоким частотам. Чтобы декодировать сжатый входящий сигнал, пользовательское оборудование 10 необязательно содержит декодер 69. Декодер 69 указывает на распаковку/декодирование стороны UE (для нисходящей линии связи), напрямую управляемое процессором 68 параметров сжатия, тогда как распаковка/декодирование 94 стороны SUDAC (для восходящей линии связи) (показанное, например, на фиг. 7) удаленно управляется процессором 68 параметров сжатия. Кодер 67, также упоминаемый как модуль сжатия, указывает на сжатие/кодирование стороны UE (для восходящей линии связи), напрямую управляемое процессором 68 параметров сжатия, тогда как сжатие/кодирование 93 стороны SUDAC (для нисходящей линии связи) удаленно управляется процессором 68 параметров сжатия. Фактические схемы сжатия описаны на фиг. 24А-Е.
В дополнительном варианте осуществления, каскад 15 приема и/или каскад 20 канальной оценки приемопередатчика 5 сконфигурирован с возможностью адаптировать параметры приема и параметры обработки сигналов в соответствии с фактическим SNR (отношением сигнала к шуму) и/или фактической канальной характеристикой, такой как скорость доплеровского изменения.
Согласно другому варианту осуществления, часть 40 управления интерфейсной стороны и дополнительная часть 42 управления интерфейсной стороны выровнены во времени и имеют разные несущие частоты, чтобы улучшать устойчивость интерполяции и/или точность интерполяции между дополнительными, последующими сигналами 45 оценки интерфейсной стороны вследствие объединенной обработки частей 40, 42 управления интерфейсной стороны. Вышеописанный приемопередатчик может дополнительно содержать анализатор частот, чтобы использовать резонансную частоту окружающего материала, которая является эталоном времени/частоты для каскада приема. Временной эталон является предпочтительным при использовании способов основанной на времени передачи, как, например, алгоритма множественного доступа с временным разделением каналов (TDMA). Хороший частотный эталон является предпочтительным для поддержания оценки частотного смещения и компенсации.
Фиг. 4 показывает схематическую блок-схему схемы обработки сигналов в пользовательском оборудовании 10. Схема обработки сигналов содержит два пути 1305a, 1305b обработки для передачи данных 60G и один путь 1310 передачи данных для передачи данных канала s6G. Путь 1310 передачи данных может указывать на прямую передачу данных s6G, обозначенную как 75b на фиг. 1. В основном, пути 1305a и 1305b обработки содержат синхронизацию 15 интерфейсной стороны (включающую в себя оценку 17 частоты интерфейсной стороны и компенсацию 18 частотного смещения интерфейсной стороны, которые являются аналогичными модулю 96 оценки частоты интерфейсной стороны и модулю 97 компенсации частоты интерфейсной стороны в SUDAC 30) и дополнительно канальную оценку 20 интерфейсной стороны и корректировку 21, где эффекты канала интерфейсной стороны (в основном) компенсируются, чтобы получать данные передачи данных s6G из данных передачи данных 60G. Над данными s6G из всех трех путей 1305a, 1305b, 1310 передачи данных могут применяться синхронизация серверной стороны (включающая в себя оценку 19 частоты серверной стороны и компенсацию 24 частотного смещения серверной стороны, которые являются аналогичными модулю 98 оценки частоты серверной стороны и модулю 99 компенсации частотного смещения серверной стороны компонента SUDAC 30) и канальная оценка 22. Сигнал, принимаемый на пути 1310, не содержит передачу по каналу 60G, но пользовательское оборудование 10 принимает данные полезной нагрузки напрямую от базовой станции, например, посредством антенны 168. Поэтому, должны применяться только синхронизация 16 серверной стороны и канальная оценка 22 серверной стороны. Канальная оценка серверной стороны всех трех путей 1305a, 1305b, 1310 обработки сигналов может осуществляться объединено или раздельным способом. Дополнительно, объединенный декодер MIMO для корректировки 23 (канала серверной стороны) MIMO с использованием канальных оценок серверной стороны из вводов 60G и антенны s6G, разделяет оценки принятого сигнала  по
по  .
.
Фиг. 5 показывает схематический общий вид компонента SUDAC 30 по отношению к обработке сигналов нисходящей линии связи. SUDAC 30 содержит приемопередатчик 85 серверной стороны, приемопередатчик 90 интерфейсной стороны, и генератор 95 сигналов оценки. Приемопередатчик 85 серверной стороны сконфигурирован с возможностью принимать входящий сигнал 105 от, по меньшей мере, одной базовой станции 70 с использованием ультравысоких частот. Входящий сигнал 105 может содержать часть 35 данных и часть 50 управления серверной стороны. Генератор 95 сигналов оценки сконфигурирован с возможностью генерировать часть 40 управления интерфейсной стороны, содержащую сигнал 45 оценки интерфейсной стороны и сигнал 46 управления. Дополнительно, приемопередатчик 90 интерфейсной стороны сконфигурирован с возможностью генерировать исходящий сигнал (110) с использованием крайне высоких частот, содержащий входящий сигнал (105) и часть (40) управления интерфейсной стороны, и передавать исходящий сигнал (110) и часть (40) управления интерфейсной стороны в пользовательское оборудование (10).
Этот вариант осуществления показывает SUDAC 30, который принимает и пересылает сигнал от базовой станции 70 в пользовательское оборудование 10 без сложной обработки сигналов, такой как канальная оценка и т.д. Не говоря уже о базовой синхронизации времени и частоты в приемопередатчике 85 серверной стороны и приемопередатчике 90 интерфейсной стороны, включающем в себя адаптации фильтра, часть обработки сигналов ограничена частотным преобразованием и в дополнительных вариантах осуществлением усиления принимаемого сигнала. Дополнительно, генератор 95 сигналов оценки создает часть (40) управления интерфейсной стороны, содержащую известный сигнал 45 оценки интерфейсной стороны, например, поле пилот-сигнала в маяковом сигнале. Маяковый сигнал может передаваться непрерывным способом непрерывно или дискретно, например, с использованием отдельного канала передачи, или маяковый сигнал включается в принимаемый сигнал, например, как часть заголовка, и обеспечивает возможность пользовательскому оборудованию 10 оценивать, по меньшей мере, сигнал 45 оценки интерфейсной стороны и обеспечивает возможность ему компенсировать обнаруженные искажения. Приемопередатчик 90 интерфейсной стороны сконфигурирован с возможностью генерировать исходящий сигнал 110 с использованием крайне высоких частот, содержащий входящий сигнал 105 и часть 40 управления интерфейсной стороны, и передавать исходящий сигнал 110 и часть 40 управления интерфейсной стороны в пользовательское оборудование 10.
Фиг. 6 показывает схематический общий вид компонента SUDAC 30 согласно одному варианту осуществления. Этот вариант осуществления может упоминаться как SUDAC с режимом приема (нисходящей линией связи) и режимом компенсации серверной стороны. SUDAC 30 содержит приемопередатчик 90 интерфейсной стороны, приемопередатчик 85 серверной стороны, и модуль 86 канальной корректировки серверной стороны. Приемопередатчик 85 серверной стороны сконфигурирован с возможностью принимать входящий сигнал 105 от упомянутой, по меньшей мере, одной базовой станции 70 с использованием ультравысоких частот и выводить входящий сигнал 105 на промежуточных частотах. Необязательно, входящий сигнал 105 может синхронизироваться посредством модуля 98 оценки частоты серверной стороны и модуля 99 оценки частоты серверной стороны. Входящий сигнал 105 может содержать часть 35 данных и часть 50 управления серверной стороны. Дополнительно, приемопередатчик 85 серверной стороны может преобразовывать входящий сигнал 105 из ультравысоких частот в промежуточную частоту, которая является более дружественной к обработке частотой, например, посредством удаления или преобразования с понижением несущей частоты. Модуль 86 канальной корректировки серверной стороны сконфигурирован с возможностью уменьшать во входящем сигнале искажения, вызываемые посредством использования ультравысоких частот, с использованием сигнала 46 конфигурации, принятого от модуля канальной оценки серверной стороны пользовательского оборудования 10 посредством приемопередатчика 90 интерфейсной стороны. Сигнал 46 конфигурации может приниматься как часть части 40 управления, например, посредством приемопередатчика 90 интерфейсной стороны. Дополнительно, приемопередатчик 90 интерфейсной стороны сконфигурирован с возможностью выводить входящий сигнал с использованием крайне высоких частот, чтобы генерировать исходящий сигнал 110 и передавать исходящий сигнал 110 в пользовательское оборудование 10. Дополнительно или альтернативно, приемопередатчик 90 интерфейсной стороны сконфигурирован с возможностью принимать сигнал 46 конфигурации от пользовательского оборудования 10 и пересылать сигнал конфигурации в модуль 86 канальной корректировки серверной стороны. Приемопередатчик 90 интерфейсной стороны передает исходящий сигнал 110 в пользовательское оборудование 10 предыскаженным способом. Поэтому, модуль 86 канальной корректировки серверной стороны может удаленно конфигурироваться оборудованием UE 10, которое анализирует ретранслируемый сигнал серверной стороны. Например, UE 10 оценивает канал MIMO серверной стороны, вычисляет матрицу корректировки MIMO серверной стороны и распространяет релевантные части посредством сигнала 46 конфигурации в маяковых сигналах (части 40 управления) в соответствующие компоненты SUDAC. Сигнал 46 конфигурации может содержать коэффициенты фильтра или индексы фильтров, чтобы выбирать из набора фильтров или других параметров обработки сигналов.
Согласно дополнительным вариантам осуществления, SUDAC 30 содержит модуль 91 канальной оценки интерфейсной стороны и модуль 92 предварительной канальной корректировки интерфейсной стороны. Модуль 91 канальной оценки интерфейсной стороны сконфигурирован с возможностью выполнять канальную оценку на основе сигнала 45 оценки интерфейсной стороны. Дополнительно, модуль 92 предварительной канальной корректировки интерфейсной стороны сконфигурирован с возможностью предварительно корректировать входящий сигнал 105, чтобы уменьшать искажения, которые будут вызываться посредством использования крайне высоких частот во время передачи исходящего сигнала 110, на основе канальной оценки модуля 91 канальной оценки интерфейсной стороны. Этот вариант осуществления описывает SUDAC 30 с расширенными функциональными возможностями обработки, так как SUDAC 30 выполняет предварительную канальную оценку и предварительную компенсацию канала интерфейсной стороны. Поэтому, пользовательское оборудование 10 может передавать часть 40 управления интерфейсной стороны, содержащую сигнал 45 оценки интерфейсной стороны. Модуль 91 канальной оценки интерфейсной стороны может использовать сигнал оценки интерфейсной стороны, чтобы вычислять, например, коэффициенты фильтра или индексы фильтров, которые могут применяться, чтобы фильтровать исходящий сигнал, модулем 92 предварительной канальной корректировки интерфейсной стороны. Также другие данные передачи данных интерфейсной стороны, такие как информация состояния и управления маяков, могут предварительно компенсироваться для передачи в пользовательское оборудование 10. Модуль 92 канальной корректировки в пользовательском оборудовании 10 является, поэтому, излишним или может, по меньшей мере, использовать уменьшенные функциональные возможности обработки.
Дополнительный вариант осуществления показывает SUDAC 30, содержащий модуль 92 предварительной канальной корректировки интерфейсной стороны, который сконфигурирован с возможностью предварительно корректировать входящий сигнал 105, чтобы уменьшать искажения, которые будут вызываться посредством использования крайне высоких частот во время передачи исходящего сигнала 110, на основе сигнала 46 конфигурации, принятого от модуля 20 канальной оценки интерфейсной стороны пользовательского оборудования 10. Этот вариант осуществления показывает SUDAC 30 с модулем 92 предварительной канальной корректировки интерфейсной стороны, который удаленно конфигурируется пользовательским оборудованием 10. Поэтому, пользовательское оборудование 10 может передавать сигнал 46 конфигурации в части 40 управления интерфейсной стороны в SUDAC 30. SUDAC 30 извлекает сигнал 46 конфигурации, содержащий, например, коэффициенты фильтра или индексы фильтров, которые могут применяться модулем 92 предварительной канальной корректировки интерфейсной стороны, чтобы, например, фильтровать исходящий сигнал. Также другие данные передачи данных интерфейсной стороны, такие как информация состояния и управления маяков, могут предварительно компенсироваться для передачи в UE 10. Дополнительно, входящий сигнал 105 может кодироваться кодером 93, например, до того, как входящий сигнал 105 предварительно корректируется, или, альтернативно, входящий сигнал 105 может кодироваться с использованием кодера 93, например, чтобы сжимать входящий сигнал 105 и, поэтому, уменьшать данные, подлежащие передаче посредством исходящего сигнала 110 в пользовательское оборудование 10. Дополнительно, кодер может содержать квантование входящего сигнала.
Фиг. 7 показывает схематический общий вид компонента SUDAC 30 согласно одному варианту осуществления. Этот вариант осуществления может упоминаться как SUDAC с режимом передачи (восходящей линии связи) и режимом компенсации. В принципе, схематический общий вид из фиг. 6 используется в противоположном направлении передачи. SUDAC 30 содержит такие же/аналогичные блоки обработки по сравнению с SUDAC, описанным на фиг. 6. Поэтому, приемопередатчик 90 интерфейсной стороны сконфигурирован с возможностью принимать входящий сигнал 150 от пользовательского оборудования 10 с использованием крайне высоких частот. Необязательно, входящий сигнал может синхронизироваться посредством применения модуля 96 оценки частоты интерфейсной стороны и модуля 97 компенсации частоты интерфейсной стороны над входящим сигналом 150. Входящий сигнал 150 может содержать часть 35 данных, часть 50 управления серверной стороны, и часть 40 управления интерфейсной стороны, содержащую сигнал 45 оценки интерфейсной стороны и сигнал 46 конфигурации. Модуль 92a канальной корректировки интерфейсной стороны может конфигурироваться посредством модуля 91 канальной оценки интерфейсной стороны или удаленно пользовательским оборудованием 10, например, с использованием сигнала 46 конфигурации. Поэтому, модуль 91 канальной оценки интерфейсной стороны или пользовательское оборудование 10 анализируют сигнал интерфейсной стороны на основе сигнала 45 оценки интерфейсной стороны или в отношении маякового сигнала, чтобы уменьшать искажения входящих сигналов. Если входящий сигнал 150 был кодирован пользовательским оборудованием 10, декодер 94 может декодировать входящий сигнал 150 до дальнейшей обработки. Приемопередатчик 90 интерфейсной стороны может дополнительно преобразовывать входящий сигнал 150 от пользовательского оборудования 10 с использованием крайне высоких частот в дружественную к обработке частоту, например, посредством удаления или преобразования с понижением несущей частоты. Приемопередатчик 90 интерфейсной стороны может извлекать сигнал конфигурации из входящего сигнала и обеспечивать его в модуль 86 предварительной канальной корректировки серверной стороны для применения. Конфигурационные данные могут содержать коэффициенты фильтра или индексы фильтров, чтобы выбирать из набора фильтров или других параметров обработки сигналов. Скорректированный и предварительно обработанный входящий сигнал пересылается в приемопередатчик 85 серверной стороны. Дополнительно, SUDAC 30 может применять (двухкаскадную) оценку частотного смещения и компенсацию, например, чтобы уменьшать доплеровские сдвиги в передаче данных интерфейсной стороны и/или серверной стороны. Приемопередатчик 85 серверной стороны может быть сконфигурирован с возможностью передавать исходящий сигнал 165 в базовую станцию 70 с использованием ультравысоких частот. Поэтому, приемопередатчик серверной стороны может применять частотное преобразование, например, из дружественных к обработке частот в ультравысокие частоты, к исходящему сигналу 165.
Все вышеописанные варианты осуществления имеют в общем то, что искажения передачи данных интерфейсной стороны также как передачи данных серверной стороны уменьшаются, или, по меньшей мере, то, что уменьшение искажений интерфейсной стороны и искажений серверной стороны обеспечивается вследствие двухкаскадной канальной оценки (также распределенным способом: канальной оценки серверной стороны в UE и канальной оценки интерфейсной стороны в SUDAC) и компенсации в пользовательском оборудовании для нисходящей линии связи.
Согласно вышеописанному варианту осуществления, SUDAC 30, описанный на фиг. 7, может содержать SUDAC согласно варианту осуществления, описанному на фиг. 6, например, чтобы создавать SUDAC, имеющий режим передачи и приема. Этот вариант осуществления описывает SUDAC 30, содержащий сложную обработку сигналов. Принимаемый сигнал, посредством линии связи либо интерфейсной стороны, либо серверной стороны, может корректироваться, то есть, в нем могут уменьшаться искажения, вызываемые посредством передачи данных, где корректировка может, например, удаленно управляться пользовательским оборудованием 10. Поэтому, канальная оценка выполняется либо в пользовательском оборудовании 10 (восходящая линия связи или нисходящая линия связи), либо в SUDAC 30 (восходящая линия связи). После завершения частотного преобразования, сигнал, подлежащий передаче, может предварительно компенсироваться с использованием ранее принятой части управления серверной стороны или ранее принятой части управления интерфейсной стороны, в зависимости от направления передачи данных. Предварительная компенсация означает улучшение качества сигнала в приемнике по сравнению с пропуском предварительной компенсации (при предположении, что приемник имеет только малые/ограниченные функциональные возможности компенсации).
Варианты осуществления показывают приемопередатчик 90 интерфейсной стороны компонента SUDAC 30, содержащий модуль оценки частоты интерфейсной стороны, сконфигурированный с возможностью выполнять оценку частоты интерфейсной стороны на основе части 40 управления интерфейсной стороны, и модуль компенсации частоты интерфейсной стороны, сконфигурированный с возможностью выполнять компенсацию частотного смещения интерфейсной стороны на основе оценки. Дополнительно или альтернативно, приемопередатчик 85 серверной стороны компонента SUDAC 30 содержит модуль оценки частоты серверной стороны, сконфигурированный с возможностью выполнять оценку частоты серверной стороны на основе части 50 управления серверной стороны, и модуль компенсации частоты серверной стороны, сконфигурированный с возможностью выполнять компенсацию частотного смещения серверной стороны на основе оценки. Частотное преобразование может выполняться посредством применения регулировки цепи фазовой синхронизации, чтобы управлять частотным преобразованием из крайне высоких частот в ультравысокие и/или дружественные к обработке частоты. Регулировка цепи фазовой синхронизации также может управлять частотным преобразованием из ультравысоких частот в крайне высокие и/или дружественные к обработке частоты. Регулировка цепи фазовой синхронизации может выполняться над аналоговым сигналом (обеспечиваемым, например, посредством маякового сигнала) и, поэтому, уменьшает усилия по цифровой обработке в SUDAC 30. Это может быть более эффективной обработкой в терминах скорости обработки и вычислительной мощности. Поэтому, SUDAC 30 может содержать управляемый напряжением осциллятор (VCO), чтобы получать компенсацию частотного смещения интерфейсной стороны и/или серверной стороны, при этом дополнительный сигнал 47 оценки интерфейсной стороны является непрерывным волновым сигналом, используемым управляемым напряжением осциллятором, чтобы выполнять обратную частотную модуляцию. Это может компенсировать частотный сдвиг входящего сигнала, например, чтобы противодействовать быстро изменяющемуся во времени доплеровскому частотному сдвигу. Согласно дополнительному варианту осуществления, приемопередатчик 85, 90 интерфейсной стороны и/или серверной стороны сконфигурирован с возможностью адаптировать свою полосу пропускания приема к полосе пропускания фактического входящего сигнала.
Дополнительные варианты осуществления показывают приемопередатчик 90 интерфейсной стороны компонента SUDAC 30, который сконфигурирован с возможностью принимать входящий сигнал 150 от пользовательского оборудования 10 с использованием крайне высоких частот, при этом входящий сигнал 150 содержит часть 35 данных и часть 40 управления интерфейсной стороны, содержащую сигнал 45 оценки интерфейсной стороны. Дополнительно, передача данных интерфейсной стороны может использовать способ дуплексирования с частотным разделением, и при этом передача данных серверной стороны может использовать способ дуплексирования с временным разделением.
Согласно дополнительным вариантам осуществления, SUDAC 30 содержит кодер, сконфигурированный с возможностью кодировать и/или сжимать входящий сигнал 105 с использованием параметров обработки сигналов и/или параметров сжатия, принятых от пользовательского оборудования 10, или при этом SUDAC содержит декодер, сконфигурированный с возможностью декодировать и/или распаковывать исходящий сигнал с использованием параметров декодирования и/или параметров распаковки, принятых от пользовательского оборудования 10. Этот вариант осуществления описывается на фиг. 24А-Е.
Компоненты SUDAC могут осуществлять ретрансляцию в/из разных поддиапазонов в частотном диапазоне 60G. Дополнительно, согласно одному варианту осуществления, предусматривается, что компоненты SUDAC сигнализируют их (потенциально индивидуальные) задержки обработки в пользовательское оборудование. И вследствие близости пользовательских оборудований и компонентов SUDAC (например, помещение), эффекты задержки распространения являются минимальными по сравнению с происходящими задержками распространения в диапазоне s6G.
В общем, SUDAS состоит из от 1 до S компонентов SUDAC, при этом SUDAS может быть построена в двух разных конфигурациях: режиме "усиления и пересылки" (AF), без или с прозрачной обработкой сигналов для ретранслируемого сигнала полезной нагрузки, или режиме "декодирования и пересылки" и "сжатия и пересылки" (DF/CF), который включает в себя (цифровую) обработку сигналов в SUDAC. В последнем случае, восходящая линия связи будет относиться к схеме декодирования и пересылки, то есть декодированию кода защиты от ошибок волновой формы 60G без повторного кодирования кода коррекции ошибок волновой формы s6G. И нисходящая линия связи означает дискретизацию принятого сигнала s6G в цифровую область без декодирования кода коррекции ошибок волновой формы s6G также как кодирования отсчетов данных полезной нагрузки посредством кода защиты от ошибок и/или посредством способов сжатия данных волновой формы 60G. В SUDAS, каждый SUDAC имеет, по меньшей мере, один ретрансляционный путь, то есть, физическое средство для приема сигнала полезной нагрузки (например, части 35 данных), его обработки (например, полосно-пропускающая фильтрация), его усиления, осуществления частотного преобразования и повторной передачи. Ретрансляционный путь может быть однонаправленным (симплексным) или двунаправленным в полудуплексном режиме. Полное дуплексирование (то есть, одновременная ретрансляция сигналов восходящей линии связи и нисходящей линии связи) является возможным только с двумя ретрансляционными путями.
Однако в концепции SUDAS, не имеется почти никаких ограничений вследствие использования второго частотного диапазона 60G. Дополнительно, в предложенной концепции предусматривается, что пользовательскому оборудованию обеспечивается возможность удаленно управлять компонентами SUDAC по отношению к выравниванию времени и частотного смещения несущей (CFO) или указывать компонентам SUDAC синхронизироваться с целевой базовой станцией.
Каждый SUDAC может иметь от 0 до N ретрансляционных путей нисходящей линии связи и от 0 до M ретрансляционных путей восходящей линии связи. Комбинация 0 восходящих линий связи и нисходящих линий связи не имеет смысла и, поэтому, исключается. Более, чем один ретрансляционный путь в расчете на SUDAC будет обеспечивать возможность поддерживать ретрансляцию нескольких диапазонов s6G одного и того же оператора мобильной сети (в случае прерывистых частотных диапазонов) или ретрансляцию разных операторов мобильной сети. Это имеет место для ретрансляционных путей с относительно узкой ретрансляционной полосой пропускания. Однако ретрансляционные пути, поддерживающие широкополосную ретрансляцию, могут охватывать несколько диапазонов s6G одного и того же или разных операторов мобильной сети.
Согласно одному варианту осуществления, SUDAC осуществляет частотное преобразование сигнала (из/в систему MIMO), где вся обработка предполагается в одиночном частотном диапазоне. Это не ограничено, например, подходом TDMA ретрансляционных и терминальных узлов, но может использовать любую подходящую схему мультиплексирования. Дополнительно, обработка не является очень потребляющей время обработки и может применяться в частотном диапазоне 60G, что является очень критическим аспектом в свете быстро изменяющегося во времени канала передачи.
Согласно одному варианту осуществления, не предполагается, что SUDAC осуществляет канальную оценку MIMO и сложную обработку сигналов, для чего могут использоваться результаты канальной оценки узлов назначения. Эта центральная роль обработки MIMO не предусматривается согласно этому варианту осуществления, так как компоненты SUDAC должны осуществлять только пересылку сигналов MIMO, тогда как обработка сигналов MIMO (кодирование/декодирование) осуществляется в базовой станции и стороне пользовательского оборудования. В противоположность так называемой многопользовательской системе MIMO, рассмотренной в [14], то есть, несколько узлов источника и назначения только с одной антенной, компоненты SUDAC действуют как внешние антенны для пользовательского оборудования, чтобы декодировать сигналы MIMO от BS (имеющей множество антенн) и наоборот.
Согласно дополнительному варианту осуществления, SUDAC осуществляет канальную оценку и обработку сигналов для входящего и исходящего сигнала. Входящий сигнал корректируется с использованием присоединенного сигнала оценки, при этом исходящий сигнал предварительно компенсируется с использованием сигнала оценки, ранее отправленного приемником, например, пользовательским оборудованием 10 или базовой станцией 70.
Базовая станция 70 также может содержать или совпадает с базовой станцией фемто. Даже хотя устройство базовой станции фемто также может размещать SUDAC в дополнение к линии связи передачи данных s6G, это не противоречит этому группированию. Другими словами, в противоположность нормальной базовой станции, она может обеспечивать передачу данных s6G и 60G. Этот случай может рассматриваться как дополнительный SUDAC для SUDAS в этом помещении, где установлена базовая станция фемто.
После того, как SUDAC 30 и пользовательское оборудование 10 были описаны отдельно, система 700, содержащая приемопередатчик 5 пользовательского оборудования 10 и SUDAC 30, показана на фиг. 8. SUDAC 30 и приемопередатчик 5 пользовательского оборудования 10 устанавливают линию связи передачи данных с использованием каскадов 15 и 55 приема и передачи приемопередатчика 5 пользовательского оборудования 10 и приемопередатчика 90 интерфейсной стороны компонента SUDAC 30. Дополнительно, SUDAC 30 и приемопередатчик 5 пользовательского оборудования 10 могут устанавливать адаптивную к аппаратному обеспечению и/или среде временную синхронизацию, при этом временная синхронизация содержит синхронизацию с использованием внешнего, общего временного эталона, или где приемопередатчик отправляет свой текущий эталон тактового сигнала. В дополнительном варианте осуществления, система 700 дополнительно содержит базовую станцию 70 и/или дополнительные компоненты SUDAC 30 и/или дополнительные пользовательские оборудования 10. Дополнительно или альтернативно, общий временной эталон базовой станции 70 может приниматься приемопередатчиком 5 пользовательского оборудования 10 и/или компонентом SUDAC 30 и применяться к их локальному времени или тактовому сигналу. Чтобы уменьшать функциональные возможности обработки компонента SUDAC 30, пользовательское оборудование 10 может извлекать временной эталон из сигнала управления серверной стороны базовой станции и пересылать общий временной эталон в SUDAC 30 с использованием, например, сигнала 46 конфигурации в части 40 управления интерфейсной стороны. Поэтому, может получаться общий временной эталон в базовой станции 70, SUDAC 30, и пользовательском оборудовании 10. В одном варианте осуществления, SUDAC 30 в системе 700 сконфигурирован для одновременной ретрансляции двух или более линий связи передачи данных, обслуживающих один или более каскадов 15, 55 приема и передачи приемопередатчика 5 одного или более пользовательских оборудований 10. Другими словами, SUDAC 30 одновременно обслуживает два или более оборудований UE (восходящая линия связи и/или нисходящая линия связи) посредством одного ретрансляционного пути, что обеспечивается посредством согласования между оборудованиями UE и SUDAC и/или между оборудованиями UE и базовой станцией по отношению к подходящим параметрам назначения ресурсов и/или сигналов передачи серверной стороны и/или интерфейсной стороны. Приемопередатчик 5 может содержать один или более каскадов 15, 55 приема в одиночном пользовательском оборудовании или в более, чем одном пользовательском оборудовании. Система 700 и, в частности, линии связи передачи данных будут подробно описываться в следующих разделах. До этого, способы для обработки сигналов в приемопередатчике 5 и компонентах SUDAC 30 будут описываться на фиг. 9 по 11.
Фиг. 9 показывает схематическую блок-схему способа 800 для обработки сигналов в приемопередатчике. Способ 800 содержит этап 805 "приема входящего сигнала от SUDAC с помощью каскада приема, который обеспечивает возможность ретрансляционной передачи данных, содержащей передачу данных интерфейсной стороны с использованием крайне высоких частот и передачу данных серверной стороны с использованием ультравысоких частот, при этом входящий сигнал содержит часть данных, часть управления серверной стороны и часть управления интерфейсной стороны, при этом часть управления интерфейсной стороны содержит сигнал оценки интерфейсной стороны и сигнал конфигурации", этап 810 "выполнения канальной оценки с помощью модуля канальной оценки интерфейсной стороны на основе сигнала оценки интерфейсной стороны", этап 815 "корректировки искажений, вызываемых посредством использования крайне высоких частот, с помощью модуля канальной корректировки интерфейсной стороны на основе канальной оценки модуля канальной оценки интерфейсной стороны", этап 820 "выполнения канальной оценки с помощью модуля канальной оценки серверной стороны на основе части управления серверной стороны", и этап 825 "корректировки искажений, вызываемых посредством использования ультравысоких частот, с помощью модуля канальной корректировки серверной стороны на основе канальной оценки модуля канальной оценки серверной стороны". В дополнительном варианте осуществления, этап 825 может выполняться посредством "корректировки искажений, вызываемых посредством использования ультравысоких частот, с помощью модуля канальной корректировки серверной стороны на основе канальной оценки модуля канальной оценки серверной стороны, которая включает в себя возможную объединенную обработку множества каскадов приема в смысле пунктов 2 и 3 формулы изобретения".
Фиг. 10 показывает схематическую блок-схему способа 900 для обработки сигналов в SUDAC, содержащую этап 905 "приема входящего сигнала от базовой станции с помощью приемопередатчика серверной стороны с использованием ультравысоких частот", этап 910 "вывода входящего сигнала на промежуточных частотах с помощью приемопередатчика серверной стороны", этап 915 "генерирования части управления интерфейсной стороны с помощью генератора сигналов оценки, содержащей сигнал оценки интерфейсной стороны и сигнал управления", и этап 920 "генерирования исходящего сигнала с помощью приемопередатчика интерфейсной стороны с использованием крайне высоких частот, содержащего входящий сигнал и часть управления, и передачи исходящего сигнала и сигнала оценки интерфейсной стороны в пользовательское оборудование".
Фиг. 11 показывает схематическую блок-схему способа 1000 для обработки сигналов в SUDAC, содержащую этап 1005 "приема входящего сигнала от базовой станции с помощью приемопередатчика серверной стороны с использованием ультравысоких частот", этап 1010 "вывода входящего сигнала на промежуточных частотах с помощью приемопередатчика серверной стороны", этап 1015 "уменьшения искажений во входящем сигнале, вызываемых посредством использования ультравысоких частот, с помощью модуля канальной корректировки серверной стороны, с использованием сигнала конфигурации, принятого от модуля канальной оценки серверной стороны пользовательского оборудования", и этап 1020 "вывода входящего сигнала с помощью приемопередатчика интерфейсной стороны с использованием крайне высоких частот, чтобы генерировать исходящий сигнал и передавать исходящий сигнал в пользовательское оборудование".
В последующем, фиг. 12А-С показывают диаграммы представления MIMO вышеописанных вариантов осуществления.
Фиг. 12А показывает схематическую диаграмму базовой станции 70 и пользовательского оборудования 10, при этом каждое имеет три антенны (167a-c и 168a-c, соответственно), описывающие общую передачу данных 3×3 MIMO. Пользовательское оборудование 10 может выполнять объединенную канальную оценку 3×3=9 каналов. Дополнительно, пользовательское оборудование 10 выполняет объединенную корректировку 9 каналов (декодирование MIMO), которая обеспечивает возможность пользовательскому оборудованию 10 различать и разделять сигналы S1, S2 и S3, которые передаются от базовой станции 70.
Фиг. 12В показывает схематическую диаграмму базовой станции 70, два компонента SUDAC 30a, 30b, и пользовательское оборудование 10 в режиме передачи данных 3×3. В этом варианте осуществления, упомянутые два компонента SUDAC 30a и 30b содержат одну антенну, каждый, чтобы принимать сигналы MIMO посредством линии связи передачи данных серверной стороны. Дополнительно, компоненты SUDAC 30a и 30b содержат передачу данных 60G интерфейсной стороны с пользовательским оборудованием 10. Пользовательское оборудование 10 дополнительно содержит свою собственную антенну 168c линии связи серверной стороны, чтобы принимать сигналы посредством передачи данных серверной стороны (упоминаемой как 75b на фиг. 1). В этом варианте осуществления, пользовательское оборудование во-первых выполняет канальную оценку и синхронизацию интерфейсной стороны над линией связи 60G и во-вторых выполняет объединенную канальную оценку канала серверной стороны, чтобы быть способным выполнять этап декодирования MIMO, чтобы разделять сигналы S1 по S3. Этот вариант осуществления показывает случай ретранслятора обработки MIMO с достаточным количеством (то есть, минимальным количеством) приемных антенн.
Фиг. 12С показывает схематическую диаграмму базовой станции 70, SUDAC 30a, содержащий две приемные антенны 168a, 168b, SUDAC 30b, содержащий одну приемную антенну 168c, и пользовательское оборудование 10, содержащее одну приемную антенну 168d. Этот вариант осуществления показывает передачу данных 3×4 MIMO, которая предлагает увеличенную производительность в терминах, например, частоты появления ошибочных битов по сравнению со случаем MIMO 3×3. Это из-за того, что декодеру MIMO предлагается дополнительная степень свободы, которая обычно обозначается как усиление разнесения приема. Другими словами, четыре приемные антенны обеспечивают, в общем, больше информации о трех переданных сигналах S1 по S3 в декодер MIMO, чем три приемные антенны.
Варианты осуществления, показанные на фиг. 12В и 12С, оба содержат только одну антенну в пользовательском оборудовании 10, что является предпочтительным в малом пользовательском оборудовании, так как антенны для канала суб 6G являются сравнительно большими. В отличие от антенн s6G, антенна, построенная для передачи данных 60G, является относительно малой. Поэтому, пользовательское оборудование может содержать больше антенн 60G, чем антенн s6G, в силу чего пользовательское оборудование может устанавливать больше соединений 60G по сравнению с пользовательским оборудованием в среде без компонентов SUDAC, что дает результатом более хорошую производительность.
Вышеупомянутые варианты осуществления описывают аппаратное обеспечение системы SUDAS. В последующем, будут описываться преимущества улучшенной схемы передачи данных между аппаратными компонентами, например, SUDAC, пользовательским оборудованием и базовой станцией. Как указано выше, ретрансляционная передача данных от базовой станции через SUDAC в пользовательское оборудование и наоборот использует две разные канальные частоты, например, канал s6G и канал 60G. Имеется несколько точек взаимодействия между эффектами s6G и эффектами 60G. Это является релевантным для моделирования влияния канала передачи, но также влияния естественного технологического допуска компонентов устройств.
В последующем, будет описываться модель канала передачи для частотного диапазона 60G. Один вариант осуществления предполагает, что пользовательское оборудование является перемещающимся объектом или что окружение пользовательского оборудования является изменяющимся во времени (например, перемещение тела или металлические отражатели), в то время как компоненты SUDAC предполагаются фиксированными. Согласно дополнительным вариантам осуществления, может учитываться относительное перемещение и отношение среды между базовой станцией и компонентами SUDAC (например, фиксированная базовая станция и перемещающиеся компоненты SUDAC) также как между базовой станцией и пользовательским оборудованием в области s6G.
ЧАСТОТНАЯ ИЗМЕНЧИВОСТЬ КАНАЛА 60G
Недавние основанные на измерении канальные модели предполагают, что канал 60G главным образом подвергается равномерному затуханию с сильной компонентой линии видимости (LOS), что может моделироваться как равномерное затухание Райса. Согласно [2], общие значения разброса задержки для передачи данных внутри помещения находятся в порядке  нс. Это можно преобразовать в полосу пропускания когерентности (где частотная корреляция канала находится выше 0.5) посредством [5]
нс. Это можно преобразовать в полосу пропускания когерентности (где частотная корреляция канала находится выше 0.5) посредством [5]

 =10МГц.
=10МГц.
Это указывает грубую меру для полосы пропускания, над которой канал может предполагаться как квазипостоянный. Максимальные избыточные задержки в несколько сотен наносекунд могут происходить с очень сильным ослаблением, с другой стороны применение направленных или управляемых антенн (в компонентах SUDAC и пользовательских оборудованиях) для передачи данных по каналу 60G будет уменьшать разброс задержки также как максимальную избыточную задержку в общем.
Как следствие, для системы передачи с полосой пропускания сигнала, значительно более малой, чем  , канальная функция передачи может моделироваться как одиночная комплекснозначная константа над полосой пропускания сигнала. В противоположность, система передачи с полосой пропускания сигнала, значительно более большой, чем , может учитывать частотную изменчивость. В последнем случае, канальная импульсная характеристика для канала 60G может оцениваться и использоваться для корректировки. Таким образом, корректировка может осуществляться на стороне приемника (например, в пользовательском оборудовании в случае нисходящей линии связи) или стороне передачи (= предварительное кодирование/предварительная компенсация) (например, в пользовательском оборудовании в случае восходящей линии связи), где могут использоваться преимущества волновой формы сигнала OFDM. Отметим, что базовая станция может осуществлять предварительное кодирование только для линии связи s6G, но не для линии связи передачи данных 60G.
, канальная функция передачи может моделироваться как одиночная комплекснозначная константа над полосой пропускания сигнала. В противоположность, система передачи с полосой пропускания сигнала, значительно более большой, чем , может учитывать частотную изменчивость. В последнем случае, канальная импульсная характеристика для канала 60G может оцениваться и использоваться для корректировки. Таким образом, корректировка может осуществляться на стороне приемника (например, в пользовательском оборудовании в случае нисходящей линии связи) или стороне передачи (= предварительное кодирование/предварительная компенсация) (например, в пользовательском оборудовании в случае восходящей линии связи), где могут использоваться преимущества волновой формы сигнала OFDM. Отметим, что базовая станция может осуществлять предварительное кодирование только для линии связи s6G, но не для линии связи передачи данных 60G.
ВРЕМЕННАЯ ИЗМЕНЧИВОСТЬ КАНАЛА 60G
Вследствие отсутствия сильных многолучевых компонент, эффект затухания для частоты является незначительным, но значительным для пространства/местоположения перемещающегося пользовательского оборудования. Дополнительно, эффект Доплера вследствие перемещения пользовательского оборудования будет главным образом давать результатом доплеровский сдвиг, нежели доплеровский разброс для каждой передачи сигналов.
Это иллюстрируется в следующих примерах:
- Общие скорости (портативного) пользовательского оборудования 10 находятся ниже 1 м/с. При предположении, что несущая частота равняется 60 ГГц, максимальная доплеровская частота и время когерентности согласно [5] получаются в результате как


 мс
мс
- Максимальная скорость/скорость наихудшего случая vmax=3 м/с может происходить, когда пользователь быстро поворачивается с пользовательским оборудованием в его руках. Таким образом, мы имеем
 мс
мс
Отметим, что описанная канальная характеристика LOS (линии видимости) может быть разной в заводских зданиях и автомобилях вследствие отражений на металлических поверхностях, что не является случаем в стандартных средах внутри помещения. Этот эффект может становиться более очевидным с более большими ретрансляционными полосами пропускания полезной нагрузки, но для 20 МГц полосы пропускания и ниже, может предполагаться частотно-равномерное затухание.
Постоянное доплеровское смещение может легко обрабатываться, так как быстро перемещающиеся пользовательские оборудования (со скоростью транспортного средства) испытывают такие доплеровские сдвиги уже на прямой линии связи с базовой станцией в линии связи s6G. Таким образом, обычное пользовательское оборудование является уже способным оценивать и компенсировать такой постоянный сдвиг.
Однако рассматриваемый доплеровский сдвиг в диапазоне миллиметровых волн может изменяться намного более быстро во времени вследствие неожиданных изменений направления перемещения пользовательского оборудования, нежели в области s6G. Например, если пользовательское оборудование, чей пользователь начинает идти, ускоряется от  м/c к
м/c к  м/c в пределах продолжительности, равной
м/c в пределах продолжительности, равной  секунд, то доплеровский сдвиг изменяется в среднем на
секунд, то доплеровский сдвиг изменяется в среднем на
 .
.
Такое же ускорение в диапазоне s6G, например, с  ГГц, будет означать изменение, равное 10Гц/с.
ГГц, будет означать изменение, равное 10Гц/с.
Это означает, что имеется намного более сильный изменяющийся во времени доплеровский сдвиг  , чем в диапазоне s6G. Как результат фаза канала (и амплитуда) изменяется быстро во времени также как скорость изменения или градиент доплеровского сдвига
, чем в диапазоне s6G. Как результат фаза канала (и амплитуда) изменяется быстро во времени также как скорость изменения или градиент доплеровского сдвига 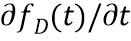 .
.
Как следствие, пользовательское оборудование не будет способным компенсировать эти быстрые изменения фазы в 60G посредством использования опорных данных, обеспеченных внутри ретранслируемого сигнала полезной нагрузки, которые определяется на основе канальных характеристик s6G. Отметим, что предусматриваемая передача высокой скорости передачи данных является очень чувствительной к любому типу помех и искажения. Поэтому, точная канальная оценка и синхронизация являются предпочтительными для систем передачи данных 60G.
УЧЕТ ЧАСТОТНОГО СМЕЩЕНИЯ НЕСУЩЕЙ И ТАКТОВОГО СИГНАЛА
Локальный осциллятор (LO) для генерирования опорных тактовых сигналов 60G является одним из наиболее критических элементов, касающихся синхронизации. Все компоненты SUDAC также как пользовательские оборудования включают в себя эти генераторы тактовых сигналов. Они могут иметь дешевые локальные осцилляторы, которые имеют, например, неточность, равную 50 импульсов в минуту, по отношению к номинальной частоте. Это ведет к смещению наихудшего случая, равному  ГГц=
ГГц= МГц, в терминах частоты дискретизации и несущей частоты. Это является уже смещением такого же порядка полосы пропускания ретранслируемого сигнала, которое ведет к сильным искажениям, если не компенсируется. К сожалению, синхронизация s6G не является достаточной, так как она предназначена для намного более малых смещений. Поэтому, в пользовательском оборудовании и в SUDAC может осуществляться новая концепция для синхронизации в 60G.
МГц, в терминах частоты дискретизации и несущей частоты. Это является уже смещением такого же порядка полосы пропускания ретранслируемого сигнала, которое ведет к сильным искажениям, если не компенсируется. К сожалению, синхронизация s6G не является достаточной, так как она предназначена для намного более малых смещений. Поэтому, в пользовательском оборудовании и в SUDAC может осуществляться новая концепция для синхронизации в 60G.
ИЛЛЮСТРАТИВНАЯ ПЕРЕДАЧА В 60G
До подробного описания новой концепции передачи и синхронизации, SUDAS вводится таким образом, что могут определяться все происходящие частотные смещения. В этом примере, мы рассматриваем сначала нисходящую линию связи интерфейсной стороны с S=3 компонентами SUDAC, то есть, передачу от компонентов SUDAC в пользовательское оборудование.
НИСХОДЯЩАЯ ЛИНИЯ СВЯЗИ С СИГНАЛОМ С ОДИНОЧНЫМ МАЯКОМ
Фиг. 13А показывает схематические спектры 170a-c передачи трех компонентов SUDAC, которые визуализированы по отношению к частоте f. Согласно одному варианту осуществления, каждый SUDAC передает блок сигналов, который состоит из маякового сигнала 175a-c (вертикальная стрелка) и ретранслируемого сигнала 180a-c полезной нагрузки внутри ретрансляционной полосы пропускания Bретрансляция 185a-c (пунктирный прямоугольник). Между маяковым сигналом 175a-c и ретрансляционным диапазоном 185a-c, имеется защитная полоса пропускания  190a-c. Отметим, что ретранслятором также могут пересылаться части соседних сигналов 195a-c s6G рядом по частоте в диапазоне s6G с целевым сигналом 180a-c полезной нагрузки. Это является сигналом, не предназначенным для UE, использующего SUDAS.
190a-c. Отметим, что ретранслятором также могут пересылаться части соседних сигналов 195a-c s6G рядом по частоте в диапазоне s6G с целевым сигналом 180a-c полезной нагрузки. Это является сигналом, не предназначенным для UE, использующего SUDAS.
Дополнительно, фиг. 13А показывает разные частотные смещения и расстояния следующим образом:
- Имеется защитная полоса пропускания 190a-c между каждым маяковым сигналом 175a-c и полосой пропускания ретранслируемого сигнала Bретрансляция 185a-c. Может делаться предположение  , но оно не является существенным, так как ретранслируемый сигнал 180a-c не необходимо располагается в центре ретрансляционной полосы 185a-c пропускания вследствие, например, доплеровских сдвигов серверной стороны
, но оно не является существенным, так как ретранслируемый сигнал 180a-c не необходимо располагается в центре ретрансляционной полосы 185a-c пропускания вследствие, например, доплеровских сдвигов серверной стороны  -
- . Таким образом, в любом случае может не иметься общего частотного расстояния между маяковым сигналом 175a-c и ретранслируемым сигналом 180a-c полезной нагрузки.
. Таким образом, в любом случае может не иметься общего частотного расстояния между маяковым сигналом 175a-c и ретранслируемым сигналом 180a-c полезной нагрузки.
- Доплеровские сдвиги интерфейсной стороны вследствие перемещения UE по отношению к компонентам SUDAC:  ,
,  , и
, и  . Пунктирные горизонтальные скобки внизу указывают, что этот сдвиг имеет место для всего блока сигналов.
. Пунктирные горизонтальные скобки внизу указывают, что этот сдвиг имеет место для всего блока сигналов.
- Доплеровский сдвиг серверной стороны  , который вероятно должен также включать в себя некоторый доплеровский разброс от распространения радиоканала s6G. Например, если рассматривать автомобиль, на котором установлены компоненты SUDAC, или транспортные средства общественного транспорта, они могут иметь до некоторой степени направленные антенны серверной стороны вне транспортного средства, и, поэтому, будут происходить разные сдвиги ,
, который вероятно должен также включать в себя некоторый доплеровский разброс от распространения радиоканала s6G. Например, если рассматривать автомобиль, на котором установлены компоненты SUDAC, или транспортные средства общественного транспорта, они могут иметь до некоторой степени направленные антенны серверной стороны вне транспортного средства, и, поэтому, будут происходить разные сдвиги ,  , и сигнала полезной нагрузки внутри ретрансляционной полосы пропускания. Неподвижные местоположения станции BS и компонентов SUDAC по отношению к друг к другу дают результатом
, и сигнала полезной нагрузки внутри ретрансляционной полосы пропускания. Неподвижные местоположения станции BS и компонентов SUDAC по отношению к друг к другу дают результатом  Гц.
Гц.
- Вследствие упомянутых неточностей локальных осцилляторов компонентов SUDAC по отношению к локальному осциллятору пользовательского оборудования, имеется результатом частотное смещение  . Так как компоненты SUDAC не еще синхронизированы, может учитываться
. Так как компоненты SUDAC не еще синхронизированы, может учитываться  , где могут возникать значения наихудшего случая в диапазоне
, где могут возникать значения наихудшего случая в диапазоне  МГц, как проанализировано выше. Эти смещения обычно происходят, когда устройство включается. Таким образом, это смещение может учитываться в начальной фазе сбора данных, где сначала устраняется большое частотное смещение (с использованием протокола интерфейсной стороны, как показано ниже) и затем начинается ретрансляция сигнала полезной нагрузки.
МГц, как проанализировано выше. Эти смещения обычно происходят, когда устройство включается. Таким образом, это смещение может учитываться в начальной фазе сбора данных, где сначала устраняется большое частотное смещение (с использованием протокола интерфейсной стороны, как показано ниже) и затем начинается ретрансляция сигнала полезной нагрузки.
Фактические частотные сдвиги дают результатом:
- [Маяк 1+Ретранслируемый сигнал 1]=Блок 1 170a сигналов → Фактический частотный сдвиг на 
- [Маяк 2+Ретранслируемый сигнал 2]=Блок 2 170b сигналов → Фактический частотный сдвиг на 
- [Маяк 3+Ретранслируемый сигнал 3]=Блок 3 170c сигналов → Фактический частотный сдвиг на  , который является отрицательным в показанном примере на фиг. 13А.
, который является отрицательным в показанном примере на фиг. 13А.
В этом варианте осуществления, предполагалось, что каждый SUDAC имеет один ретрансляционный путь нисходящей линии связи. Однако каждый SUDAC может иметь N ретрансляционных путей в общем. Если N=2, например, блок 1 170a сигналов и блок 2 170b сигналов могут передаваться посредством одного и того же SUDAC в одно пользовательское оборудование. Тогда будет иметься результатом  и
и  , где доплеровский сдвиг является только приблизительно равным из-за потенциально разных направленностей и местоположений антенн на устройстве SUDAC.
, где доплеровский сдвиг является только приблизительно равным из-за потенциально разных направленностей и местоположений антенн на устройстве SUDAC.
РАССМОТРЕНИЯ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ
Случай восходящей линии связи, то есть, передача от пользовательского оборудования в три компонента SUDAC, описывается согласно фиг. 13А. Снова, имеем как относительное смещение между локальным осциллятором пользовательского оборудования и осцилляторами SUDAC. Не имеется никакого доплеровского частотного сдвига серверной стороны - вследствие противоположного направления передачи, но доплеровские сдвиги интерфейсной стороны вследствие перемещения пользовательского оборудования по отношению к компонентам SUDAC (, , и ) все еще являются разными и могут компенсироваться внутри SUDAS, так как базовая станция не будет способной компенсировать их.
Поэтому, может применяться механизм синхронизации, обеспечивавший возможность пользовательскому оборудованию, SUDAC и базовой станции отправлять и принимать данные надежно от одного устройства к другому.
КОНЦЕПЦИЯ ДЛЯ СИНХРОНИЗАЦИИ
Концепция для синхронизации нацелена на тип SUDAS "усиления и пересылки" (AF), где возникает проблема синхронизации и корректировки ретранслируемого сигнала, который не предназначен для передачи 60G. Однако для типа системы SUDAS "сжатия и пересылки" (CF), будет иметься конкретная волновая форма, которая будет подходить для передачи 60G, чтобы обеспечивать синхронизацию корректно и независимо от вставляемых ретранслируемых данных полезной нагрузки. Здесь, "подходит для передачи 60G" означает адекватную структуру данных пилот-сигнала волновой формы CF для синхронизации в 60G. Однако в случае AF, ретранслируемые данные полезной нагрузки пересылаются напрямую или прозрачно и "адекватная структура данных пилот-сигнала" может добавляться отдельно согласно концепции, описанной ниже. Следующие части имеют дело с системой передачи в общем.
ТИПЫ ДУПЛЕКСИРОВАНИЯ МОБИЛЬНОЙ СЕТИ
В общем, можно различать между двумя типами дуплексирования мобильной сети, которые ведут к разным аспектам в случае ретрансляции:
- Система дуплексирования с частотным разделением (FDD): Передача полезной нагрузки восходящей линии связи и нисходящей линии связи происходит на разных несущих частотах и может, поэтому, использоваться одновременно и не должна быть синхронизированной во времени. Для этого случая, подходы, описанные ниже, могут использоваться, как они есть. Компоненты SUDAC тогда имеют осуществленные однонаправленные ретрансляционные пути, например, один ретрансляционный путь нисходящей линии связи и один ретрансляционный путь восходящей линии связи, которые работают независимо друг от друга.
- Система дуплексирования с временным разделением (TDD): Передача полезной нагрузки восходящей линии связи и нисходящей линии связи происходит на одной и той же несущей частоте, но в разных временных слотах. Для этого случая, SUDAS также может синхронизироваться с циклом переключения дуплексирования. Каждый осуществленный ретрансляционный путь компонента SUDAC также должен поддерживать двунаправленную передачу согласно циклу переключения дуплексирования.
ИЛЛЮСТРАТИВНЫЕ СХЕМЫ МАЯКОВОГО СИГНАЛА
Маяковые сигналы предназначены для передачи, конфигурирования, и синхронизации в 60G для системы SUDAS, также называются каналы состояния/управления. Согласно фактическому варианту осуществления, маяковый сигнал может быть, например, сигналом с одиночной несущей, сигналом с множеством несущих, таким как OFDM, или сигналом с расширенным спектром, ср. [4] и [5]. Ниже перечислены общие аспекты для создания подходящей схемы маякового сигнала.
- Вследствие отсутствия канальной дисперсии в диапазоне 60G, сигнал с одиночной несущей может быть хорошим выбором вследствие его простоты в обработке сигналов.
- Так как может предусматриваться двунаправленная передача данных посредством маяковых сигналов между компонентами SUDAC и UE, можно выбирать между подходом TDD и FDD. В любом случае, должна быть достаточно плотная структура полей пилот-сигналов внутри маякового сигнала, чтобы обеспечивать две цели: Успешную канальную оценку и синхронизацию для устойчивой передачи маякового сигнала также как корректировку быстро изменяющегося канала интерфейсной стороны в ретрансляционной полосе пропускания.
- В общем, маяковый сигнал может определяться как непрерывная или прерывающаяся/пульсирующая передача, где последняя является предпочтительной для подхода TDD. Во время активной ретрансляции сигнала, наиболее удобным способом для синхронизации приемника (каскада приема пользовательского оборудования) является иметь непрерывную и регулярную структуру данных пилот-сигнала внутри маякового сигнала. В этом отношении, не имеет значение, заполняют ли поля данных маяка полностью пространство между полями пилот-сигналов или передаются ли поля данных компонентом SUDAC или пользовательским оборудованием (в случае TDD). Таким образом, является предпочтительным определять рабочий цикл полей пилот-сигналов несущей маяка, то есть отношение совместного использования между полями пилот-сигналов и полями не пилот-сигналов.
- Вследствие быстро изменяющегося со временем канала, является предпочтительным, чтобы маяковый сигнал имел достаточно высокую скорость передачи символов для передачи данных пилот-сигналов в плотной временной сетке. Таким образом, поля пилот-сигналов внутри маяковых сигналов могут быть достаточно плотными, чтобы обеспечивать возможность интерполяции по полям данных маяка. В зависимости от отношения сигнала к шуму (SNR), также имеется некоторая длина поля пилот-сигнала, предпочтительная для обеспечения точности оценки. В последующем, предполагается, что рабочий цикл поля пилот-сигнала и длина поля корректно спроектированы для канала 60G (="адекватная структура данных пилот-сигнала").
Чтобы быть более конкретными, возможные варианты осуществления схем маякового сигнала описываются на фиг. 13А-17, при этом фиг. 13А-15 показывают иллюстративные спектры передачи с использованием разных маяковых схем и фиг. 16-17 показывают иллюстративные структуры маяковых схем. Ссылочные позиции 175, 200, 205, 210, и 215, используемые для маякового сигнала, указывают на часть 40 управления интерфейсной стороны и/или дополнительную часть 42 управления интерфейсной стороны. Ссылочная позиция 220 полей данных пилот-сигналов указывает на часть 45 управления интерфейсной стороны и ссылочная позиция 225 полей данных указывает на сигнал 46 конфигурации.
На фиг. 13А, показан блок сигналов с одиночным маяком, который уже был введен и визуализирован.
Фиг. 13В показывает иллюстративные спектры 170a-c передачи несинхронизированной передачи с двумя маяками в диапазоне 60G посредством трех компонентов SUDAC. При использовании блоков сигналов с двумя маяками, один маяковый сигнал располагается ниже и другой маяковый сигнал располагается выше ретрансляционной полосы пропускания. Поэтому, второй маяковый сигнал 200a-c добавляется к спектрам передачи из фиг. 13А. Как показано на фиг. 13В, второй маяковый сигнал 200a-c может иметь такую же защитную полосу пропускания  -
- выше ретрансляционной полосы 185a-c пропускания по сравнению с защитной полосой пропускания маяковых сигналов 175a-c ниже ретрансляционной полосы пропускания. В дополнительном варианте осуществления, защитная полоса пропускания также может различаться между ретранслируемым сигналом 180a-c полезной нагрузки и маяковым сигналом 175a-c или маяковым сигналом 200a-c.
выше ретрансляционной полосы 185a-c пропускания по сравнению с защитной полосой пропускания маяковых сигналов 175a-c ниже ретрансляционной полосы пропускания. В дополнительном варианте осуществления, защитная полоса пропускания также может различаться между ретранслируемым сигналом 180a-c полезной нагрузки и маяковым сигналом 175a-c или маяковым сигналом 200a-c.
Фиг. 14 показывает иллюстративный спектр 170 передачи блоков сигналов с множеством маяков в диапазоне 60G посредством одного SUDAC. Блоки сигналов с множеством маяков характеризуются более, чем одним маяковым сигналом ниже ретрансляционной полосы 185 пропускания и/или более, чем одним маяковым сигналом выше. В показанном варианте осуществления на фиг. 14, имеется первый и второй маяк 175, 205 ниже ретрансляционной полосы 185 пропускания и первый и второй маяк 200, 210 выше ретрансляционной полосы 185 пропускания, имеющие две защитных полосы пропускания  и . Сигналы с множеством маяков могут реализовываться и осуществляться разными способами. Если применяется способ передачи с множеством несущих, такой как OFDM, может обеспечиваться индивидуальное назначение ресурсов поднесущих для данных маяка и данных пилот-сигнала. Согласно дополнительным вариантам осуществления, несколько маяковых сигналов с одиночной несущей могут размещаться на разных частотах, чтобы обеспечивать такое же свободное назначение ресурсов, как показано на фиг. 15. Однако простое повторение маякового сигнала с одиночной несущей по частоте может выполняться посредством передачи также спектральных повторений исходно цифрового маякового сигнала.
и . Сигналы с множеством маяков могут реализовываться и осуществляться разными способами. Если применяется способ передачи с множеством несущих, такой как OFDM, может обеспечиваться индивидуальное назначение ресурсов поднесущих для данных маяка и данных пилот-сигнала. Согласно дополнительным вариантам осуществления, несколько маяковых сигналов с одиночной несущей могут размещаться на разных частотах, чтобы обеспечивать такое же свободное назначение ресурсов, как показано на фиг. 15. Однако простое повторение маякового сигнала с одиночной несущей по частоте может выполняться посредством передачи также спектральных повторений исходно цифрового маякового сигнала.
Дополнительно, могут применяться блоки сигналов с (множеством) маяками (такие как на фиг. 14) с другой/адаптивной структурой сигнала над ресурсом t-f-c-s. То есть, плотность пилот-сигнала может адаптироваться во времени (длина поля пилот-сигнала или плотность), чтобы учитывать более быстро или более медленно изменяющийся канал. Таким образом, устройство канальной оценки (например, UE) будет обеспечивать обратную связь в устройство передачи полей пилот-сигналов (например, SUDAC). В противоположность следующему подходу, преимущество блоков сигналов с множеством маяков состоит в том, что маяки могут легко устраняться полностью из блока сигналов, так что не остается помех для ретранслируемой полезной нагрузки.
Фиг. 15 показывает иллюстративный спектр 170 передачи блока сигналов с маяком суперпозиции в диапазоне 60G посредством одного SUDAC. Здесь спектральный промежуток внутри ретрансляционной полосы пропускания используется, чтобы помещать маяк 215 суперпозиции. Блоки сигналов с маяками суперпозиции соответствуют блокам сигналов с множеством маяков, но вводят также маяковые сигналы 215 внутри ретрансляционной полосы 185 пропускания. Таким образом, последние упомянутые маяковые сигналы будут располагаться в суперпозиции с ретранслируемыми сигналами. Устойчивая волновая форма маякового сигнала является предпочтительной для обеспечения возможности обнаружения и канальной оценки в этом сценарии помех. Маяковые сигналы суперпозиции имеют три больших преимущества/характеристики:
a) Так как местоположение и содержимое располагающихся в суперпозиции маяковых сигналов являются известными в UE, они могут устраняться из сигнала полезной нагрузки. Эта схема передачи может относиться к типу передачи CDMA.
b) Как a), но используются некоторые промежутки в спектре ретранслируемых сигналов внутри ретрансляционной полосы пропускания. Наиболее вероятно, UE знает или обнаруживает промежутки и сигнализирует эту информацию в SUDAC. Таким образом, оставшиеся помехи после возможного неполного устранения маяковых сигналов избегаются, так как сигнал полезной нагрузки не располагается в этих частотах. Этот вариант осуществления визуализирован на фиг. 15. Эта схема является подходящей для подхода FDMA. В случае, когда SUDAC информируется оборудованием UE по назначению ресурсов сигнала полезной нагрузки во времени, также можно применять схему TDMA для маяков суперпозиции.
c) Пользовательское оборудование может сигнализировать в базовую станцию не назначать данные полезной нагрузки конкретным частотным ресурсам, где располагающиеся в суперпозиции маяковые сигналы должны располагаться по частоте. Как следствие, также никакая искажающая суперпозиция не будет происходить за счет уменьшенной полезной полосы пропускания s6G для данных полезной нагрузки из-за этого спектрального промежутка. Однако базовая станция может заполнять этот спектральный промежуток с помощью данных полезной нагрузки для других пользовательских оборудований, которые не пересылаются компонентом SUDAC.
РЕШЕТОЧНЫЙ БЛОК МАЯКОВЫХ СИГНАЛОВ
В специальном случае ретрансляции набора несущих серверной стороны, SUDAC может сдвигать спектры сигналов разных несущих серверной стороны по частоте (в дополнение/комбинации с преобразованием с повышением), чтобы формировать подходящие промежутки для передачи маяковых сигналов. Этот режим может использоваться, если базовая станция агрегирует набор поддиапазонов для одного пользовательского оборудования или некоторой группы пользовательских оборудований, что является потенциальным способом для достижения высоких скоростей передачи данных. Если данные некоторой группы пользовательских оборудований расширяются по этим поддиапазонам, может достигаться усиление мультиплексирования по сравнению с агрегированием исключительно одного поддиапазона в расчете на пользовательское оборудование. Пример визуализирован на фиг. 27, где поддиапазоны/несущие 1 по 3 1605-1615 сдвинуты отдельно и поддиапазоны/несущие 4+5 1620, 1625 вместе. Отметим, что будет иметься максимальное расстояние между двумя маяками, чтобы обеспечивать возможность корректной канальной оценки, вот почему этот сдвиг поддиапазонов и наличие маяков "суперпозиции" может быть предпочтительным. Полная полоса пропускания ретранслируемого сигнала Bретрансляция,полная равняется сумме полос пропускания ретранслируемых сигналов серверной стороны Bретрансляция,a+Bретрансляция,b+Bретрансляция,c+Bретрансляция,d.
При учете структуры маякового сигнала, в последующем описываются два примера для блока сигналов с двумя маяками.
Фиг. 16 показывает иллюстративные поля пилот-сигналов индикации высокоуровневой структуры маякового сигнала и поля для данных управления и конфигурации в режиме TDD. При предположении сигнала с одиночной несущей с линейной модуляцией, первая потенциальная высокоуровневая структура сигнала изображена на фиг. 16, где поля 220 данных пилот-сигналов вставлены регулярным образом, передаются компонентом SUDAC и имеют продолжительность, равную Tпилот-сигнал. Между полями пилот-сигналов, имеются поля 225 данных для данных конфигурации и управления. В этом варианте осуществления маякового сигнала 1 175, сначала передает компонент SUDAC, затем пользовательское оборудование 1 и в заключение пользовательское оборудование 2, в то время как последнее поле данных является пустым в качестве запасного. Вышеупомянутая должная конструкция маякового сигнала будет гарантировать, что Tпилот-сигнал+Tданные является (значительно) более малым, чем TC. В этом примере, маяковый сигнал 2 200 (помещенный, например, на правой стороне спектра) имеет такую же, но сдвинутую структуру. Эта смещенная схема, которая также может расширяться на более, чем два маяковых сигнала, имеет следующие преимущества:
- В результате получается более плотная сетка оценок доплеровской частоты (по меньшей мере, одна в расчете на каждое поле пилот-сигнала) во временном направлении по сравнению с сигналом с одиночным маяком такого же типа. Это дает результатом более хорошее отслеживание изменения доплеровской частоты.
- Структура обеспечивает возможность более точной канальной интерполяции из смещенных полей пилот-сигналов по ретрансляционной полосе пропускания, как описано в дополнительном разделе.
Так как эта структура сигнала, изображенная на фиг. 16, обеспечивает возможность передачи для пользовательских оборудований и компонентов SUDAC в режиме TDD, структура может использоваться для ретрансляции восходящей линии связи и нисходящей линии связи вследствие концепций синхронизации, показанных ниже.
Фиг. 17 показывает иллюстративные поля пилот-сигналов индикации высокоуровневой структуры маякового сигнала и поля для данных управления и конфигурации в режиме FDD. Согласно этому варианту осуществления, оба маяковых сигнала 175, 200 имеют такую же структуру пилот-сигнала, как показано на фиг. 16. Здесь, маяковый сигнал 1 175 предназначен только для передачи данных конфигурации SUDAC и маяковый сигнал 2 200 предназначен только для данных управления пользовательского оборудования. Таким образом, эта смешанная схема TDMA/FDMA обеспечивает возможность передачи данных состояния и управления для оборудований UE и SUDAC в режиме FDD (в виду компонента SUDAC).
Передача полей пилот-сигналов компонентом SUDAC имеет пару преимуществ по сравнению с передачей полей пилот-сигналов пользовательским оборудованием.
- Будет требоваться применение схемы для выравнивания передачи полей пилот-сигналов оборудования UE1, оборудования UE2, и дополнительных оборудований, где, управление новыми введенными устройствами не является предпочтительным. Будет требоваться увеличенное количество запасных полей данных, чтобы размещать все потенциальные поля пилот-сигналов оборудований UE вследствие разных каналов передачи. Однако поля пилот-сигналов, передаваемые компонентом SUDAC, могут использоваться для более, чем одной линии связи передачи.
- SUDAC не должен тратить усилия на канальную оценку и корректировку, это делается пользовательским оборудованием.
- Хорошая точность канальной оценки в ретрансляционной полосе пропускания, так как каждое пользовательское оборудование может оценивать маяковые сигналы каждого SUDAC, имеющего соединение линии видимости с пользовательским оборудованием.
- Постоянная передача полей пилот-сигналов не является проблемой для SUDAC, который обычно соединен с источником питания (любого типа), но приводимое в действие аккумулятором UE может страдать от бремени постоянной передачи.
В общем, последовательность символов пилот-сигналов может быть одной и той же или разной внутри разных полей пилот-сигналов согласно предварительно определенной схеме генерирования.
ПРИНЦИПЫ И ТРЕБОВАНИЯ
Базовый принцип функциональности/работы SUDAC:
- Передача сигнализации посредством маяковых сигналов (цифровой обработки Rx и Tx) между компонентами SUDAC и UE в области 60G.
- Ретрансляция сигналов полезной нагрузки посредством одной или более аналоговых цепей RF, которая включает в себя усиление, преобразование несущей частоты и фильтрацию. Один ретрансляционный путь используется в расчете на ретранслируемый сигнал. По меньшей мере, один процессор маяковых сигналов может использоваться в расчете на ретранслируемый сигнал.
Требования пользователя к системе:
- Обычные случаи: ходьба с UE, поворот с UE. Высокая точность канальной оценки является предпочтительной, чтобы не ухудшалась пропускная способность системы.
- Нетипичные случаи: бросание UE на пол, быстрое встряхивание UE. Канальная оценка может терпеть неудачу и синхронизация может теряться, пока такой вариант использования сохраняется. Быстрое восстановление обеспечивается после окончания этих событий.
Общий поток синхронизации в приемнике:
1. Сбор данных для грубой синхронизации, чтобы уменьшать смещения (например, частотное смещение несущей), так что с этим могут справляться алгоритмы стадии отслеживания:
- Холодный сбор данных после включения устройства
- Горячий сбор данных после того, как инициируется внутренняя перезагрузка устройства, например, посредством нажатия кнопки перезагрузки
2. Отслеживание для точной синхронизации и канальной оценки
- Смещения дополнительно уменьшаются посредством более точных алгоритмов этой стадии
- В этом режиме осуществляется демодуляция данных.
ЧАСТОТНАЯ СИНХРОНИЗАЦИЯ
Как указано ранее, смещение локального тактового сигнала, ведущее к смещениям дискретизации и несущей частоты является серьезной проблемой, так как смещение наихудшего случая является уже более высоким, чем потенциальные полосы пропускания маякового сигнала. Обычно частотная синхронизация выполняется до того, как применяется канальная оценка. Хотя можно измерять только сумму  , может использоваться то, что может случаться, что
, может использоваться то, что может случаться, что  , и что доплеровский сдвиг
, и что доплеровский сдвиг  изменяется более быстро во времени, чем .
изменяется более быстро во времени, чем .
1. Во время сбора данных, среднее и потенциально большое частотное смещение несущей оценивается и компенсируется, что указывает в основном на частотное смещение локального осциллятора.
2. Во время отслеживания, предполагается, что большое смещение, оцененное в 1., уже скомпенсировано. Имеется три задачи, подлежащие выполнению:
- Быстро изменяющаяся доплеровская частота интерфейсной стороны может оцениваться, отслеживаться, и компенсироваться.
- Вторая задача состоит в том, чтобы отслеживать дрейф частоты локального осциллятора во времени, что является обычно достаточно медленным процессом.
- Доплеровская частота серверной стороны может оцениваться и компенсироваться.
НАЧАЛЬНАЯ ОЦЕНКА ЧАСТОТНОГО СМЕЩЕНИЯ ЛОКАЛЬНЫХ ОСЦИЛЛЯТОРОВ
Основная часть проблемы частотного смещения несущей относится к частотному смещению локального осциллятора в 60G, которое является относительным между устройствами передачи данных, например, между компонентами SUDAC и/или пользовательскими оборудованиями. В последующем, описываются разные стратегии как потенциальные исправления:
1. Самосинхронизация SUDAS посредством каналов сближения 60G. Компоненты SUDAC могут обнаруживать друг друга посредством их передаваемых маяковых сигналов в каналах сближения посредством сканирования по частотной области. Как только находят друг друга, компоненты SUDAC могут согласовывать общий эталон тактового сигнала посредством передачи маякового сигнала. Пользовательское оборудование будет затем синхронизировать себя с маяковыми сигналами, переданными от компонентов SUDAC, или примет участие в процессе согласования.
Чтобы предотвращать так называемую проблему скрытых узлов, где некоторые компоненты SUDAC не могут быть обнаружены вследствие сильного ослабления сигналов или даже затенения, пользовательское оборудование, если оно присутствует, может иметь соединение с отсутствующими компонентами SUDAC и может пересылать команды согласования. Оборудования UE могут даже видеть один SUDAC из этого кластера и один из другого кластера, что будет обеспечивать возможность синхронизации этих кластеров. Это предотвращает потерю компонентами SUDAC согласования тактового сигнала. Эта схема может работать прекрасно и автономно, когда гарантируется, что все компоненты SUDAC могут обнаруживать друг друга, например, посредством планирования местоположения устройств внутри автомобиля. Дополнительно, этот вариант осуществления не нуждается в передаче данных s6G, где, если в мобильной среде  имеет место также для опорных сигналов базовой станции, передача данных s6G может вести к дополнительным проблемам.
имеет место также для опорных сигналов базовой станции, передача данных s6G может вести к дополнительным проблемам.
2. Самосинхронизация SUDAS посредством сети передачи данных третьей стороны, например, передача данных по линии питания в случае, когда все компоненты SUDAC установлены на настенных розетках. UE будет тогда синхронизировать себя с маяковыми сигналами, передаваемыми от компонентов SUDAC. Эта схема может работать автономно как способ 1, но пропускает проблему скрытых узлов, так как все компоненты SUDAC соединены с сетью передачи данных третьей стороны, чтобы участвовать в согласовании общего эталона тактового сигнала. Поэтому, устройство/компонент передачи данных может применяться в каждом SUDAC.
3. Выравнивание SUDAS с внешним/отдельным устройством опорного тактового сигнала. Компоненты SUDAC соединены с внешним устройством опорного тактового сигнала. Можно даже думать об устройстве с использованием резонансной частоты, например, кислорода. Эти спектральные линии являются очень острыми, что может использоваться для синхронизации локального осциллятора. Пользовательское оборудование будет тогда синхронизировать себя с маяковыми сигналами, передаваемыми от компонентов SUDAC.
Эта стратегия указывает на общий эталон без какого-либо дополнительного механизма управления или усилий по согласованию, что может быть практичным для лабораторных экспериментов и малой SUDAS как в автомобиле, где, например, может использоваться радиочастотная (RF) модуляция источника питания DC (прямого тока). Это уменьшает усилия по установке или установлению отдельных проводов или линий радиосвязи для распространения тактового сигнала, так как существующие провода могут повторно использоваться. Общий эталон может применяться посредством использования устройства, использующего резонансные частоты/спектральные линии окружающего материала, например, газа, такого как кислород.
4. Выравнивание SUDAS с пользовательским оборудованием в качестве эталона.
a) Так как UE в любом случае может осуществлять сканирование в отношении новых компонентов SUDAC в своем диапазоне передачи посредством обнаружения маяковых сигналов, также как отслеживать качество фактических соединений, UE может управлять смещением тактового сигнала компонентов SUDAC по отношению к своему собственному локальному тактовому сигналу.
Если компоненты SUDAC имеют несколько ретрансляционных путей, каждый путь может иметь свое собственное генерирование/выравнивание тактовых сигналов, так как каждый путь может относиться к разному UE. Если все пользовательские оборудования должным образом синхронизированы с их базовой станцией и базовые станции синхронизированы, то трудность выравнивания с разными тактовыми сигналами может не возникать. Пользовательское оборудование может тратить также некоторые усилия в управлении всеми компонентами SUDAC также как обеспечивать быстрые обновления в случае объединений SUDAC. Поэтому, только компоненты SUDAC в диапазоне действия оборудования UE могут быть активными и осуществлять синхронизацию.
b) Автоматизированная схема частотной синхронизации тактового сигнала может выполняться в SUDAC на основе "пробуждающих маяковых сигналов", отправляемых оборудованием UE в каналах сближения. То есть, компоненты SUDAC синхронизируют себя с маяковыми сигналами UE. Это может быть многоэтапным процессом: начальная синхронизация с пробуждающим сигналом, за которой следует квитирование установления связи, где смещение дополнительно уменьшается, и, в заключение, использование маяка пользовательских оборудований, чтобы оставаться в синхронизации. SUDAC может осуществлять активное сканирование в отношении "пробуждающих маяковых сигналов" и выполнять обработку, чтобы адаптировать/управлять своим локальным тактовым сигналом. Сканирование может делаться в любом случае, дополнительно алгоритм сбора данных может быть способен обнаруживать пробуждающие сигналы при очень высоком частотном смещении и затем оценивать это смещение. Снова, если компоненты SUDAC имеют несколько ретрансляционных путей, каждый путь может иметь свое собственное генерирование/выравнивание тактовых сигналов, так как каждый путь может относиться к разному UE. Поэтому, пользовательское оборудование может не координировать и управлять всеми смещениями тактового сигнала разных компонентов SUDAC. Более того, никакие дополнительные сигналы управления не должны передаваться.
5. SUDAS, выровненная с базовой станцией в качестве эталона. Базовая станция передает опорные сигналы в области s6G (такой как общий канал управления в режиме не-MIMO (с множеством входов и множеством выходов) также как данные пилот-сигнала, вставляемые в сигнал полезной нагрузки), чтобы обеспечивать возможность синхронизации пользовательского оборудования. Имеющий функциональные возможности SUDAC также может принимать эти сигналы и использовать это для синхронизации. В качестве альтернативы, специальные опорные сигналы могут передаваться от базовой станции, предназначенной для компонентов SUDAC или других устройств, для синхронизации.
Поэтому, компоненты SUDAC могут быть способны обрабатывать сигналы s6G, чтобы принимать эталон тактового сигнала. В этом варианте осуществления, все устройства 60G (включая сюда пользовательские оборудования) имеют один и тот же эталон. Так как сигнал BS всегда присутствует, компоненты SUDAC могут обновлять их компенсацию смещения в специальном цикле. Таким образом, он синхронизируется в любое время и может напрямую начинать ретрансляцию, когда активируется оборудованием UE. Это может иметь особый интерес в (квази) стационарной/фиксированной среде станции BS и компонентов SUDAC.
6. Комбинированные подходы:
- Переключение между подходами: Например, если внешний источник тактовых сигналов соединен с SUDAC, он осуществляет переключение на способ 3. В противном случае, он будет использовать способ 5.
- Одновременное использование подходов: Например, способ 5 используется в качестве базового для грубой синхронизации, так как имеется неопределенность ненулевого доплеровского сдвига серверной стороны  . Точная синхронизация несущей частоты выполняется посредством способа 4.b).
. Точная синхронизация несущей частоты выполняется посредством способа 4.b).
Дополнительно, будут перечисляться этапы для синхронизации несущей частоты согласно одному варианту осуществления.
1. Сканирование по частоте, где обычно применяется обнаружение мощности (маяковых сигналов). Это дает результатом грубую синхронизацию несущей частоты. После этого, могут собираться все найденные частоты маякового сигнала.
2. Точная синхронизация несущей частоты и управление
Дополнительно или альтернативно, могут применяться способ для вычисления оценки частотного смещения из опорных данных или вслепую посредством обнаружения мощности или использования свойств корреляции сигналов.
ЧАСТОТНОЕ СМЕЩЕНИЕ НЕСУЩЕЙ ИНТЕРФЕЙСНОЙ СТОРОНЫ
Фиг. 18 показывает изображение из фиг. 16, где дополнительно, показаны оценки доплеровского сдвига интерфейсной стороны - и комплексные канальные коэффициенты , выведенные из двух иллюстративных маяковых сигналов 175, 200 от одного SUDAC.
Частотное смещение несущей (CFO) интерфейсной стороны может оцениваться в расчете на каждое поле пилот-сигнала (или подблоки полей пилот-сигналов), может интерполироваться между полями пилот-сигналов (или подблоками) и немедленно компенсироваться вследствие быстрого изменения во времени. Хотя фиг. 18 представляет только один блок сигналов, это может осуществляться для каждого блока сигналов индивидуально вследствие разных (доплеровских) смещений.
Применяются алгоритмы для этой оценки плюс потенциальное усреднение по оценкам из разных маяковых сигналов и оставшиеся изменения фазы (вследствие некоторой вариантности оценки) во времени и частоте будут блокироваться посредством канальной оценки. Это визуализировано на фиг. 18, где оцененные доплеровские частоты интерфейсной стороны показаны в разные моменты времени, также как канальные оценки (одиночного коэффициента) h в разные моменты времени и частоты.
Так как CFO интерфейсной стороны является одним и тем же для всех маяковых сигналов от одного и того же источника, особенно смещенная во времени структура полей пилот-сигналов обеспечивает возможность очень гладкой интерполяции и компенсации фактического CFO интерфейсной стороны.
ЧАСТОТНОЕ СМЕЩЕНИЕ НЕСУЩЕЙ СЕРВЕРНОЙ СТОРОНЫ
После компенсации CFO интерфейсной стороны, может компенсироваться CFO серверной стороны вследствие доплеровского сдвига . Согласно одному варианту осуществления, компенсация этих смещений не должна делаться компонентом SUDAC (особенно в случае аналогового типа усиления и пересылки вследствие проблем осуществимости оценки), но скорее оборудованием UE, которое уже имеет осуществленные такие функциональные возможности.
ПРОБЛЕМЫ ОЦЕНКИ ЧАСТОТНОГО СМЕЩЕНИЯ НЕСУЩЕЙ
- Новые способы для начального сбора данных показаны в предыдущих разделах.
- Двухэтапный подход оценки и компенсации является полезным для отслеживания: Во-первых, CFO интерфейсной стороны оценивается на основе полей пилот-сигналов маякового сигнала и компенсируется для маякового сигнала и ретранслируемого сигнала полезной нагрузки. Во-вторых, CFO серверной стороны оценивается и компенсируется на основе опорных данных сигнала полезной нагрузки.
- Пользовательское оборудование может передавать маяковые сигналы внутри блока сигналов восходящей линии связи, что может использоваться в компонентах SUDAC для компенсации частотного смещения. В одном варианте осуществления, специальные маяковые сигналы управляют быстрой регулировкой цепи фазовой синхронизации (PLL), чтобы управлять модулем смешения для преобразования с понижением из 60G в s6G. Более конкретно, один из маяковых сигналов из блока сигналов с множеством маяков может быть непрерывным волновым сигналом, который может пересылаться внутри SUDAC напрямую как аналоговый ввод в VCO, чтобы выполнять обратную частотную модуляцию для быстрой компенсации частотного смещения. Этот подход может компенсировать изменяющиеся по фазе/частоте сигналы. В случае SUDAS типа сжатия и пересылки, эта фазовая компенсация может выполняться в цифровой области компонента SUDAC.
КАНАЛЬНАЯ ОЦЕНКА ДЛЯ ЧАСТИ НИСХОДЯЩЕЙ ЛИНИИ СВЯЗИ: БАЗОВАЯ СТАНЦИЯ - SUDAS - ПОЛЬЗОВАТЕЛЬСКОЕ ОБОРУДОВАНИЕ
Канальная оценка является предпочтительной для корректировки маяковых сигналов и ретранслируемых сигналов полезной нагрузки.
КАНАЛЬНАЯ ОЦЕНКА НА СТОРОНЕ UE
После стандартных этапов обработки оборудования UE, таких как полосно-пропускающая фильтрация, преобразование с понижением, низкочастотная фильтрация, и синхронизация, выполняется канальная оценка. Сигналы от разных компонентов SUDAC могут рассматриваться отдельно, так как применяются разные каналы передачи в расчете на каждую линию связи. Способ канальной оценки и точность зависит от обеспечиваемых маяковых сигналов компонентов SUDAC следующим образом:
- Блоки сигналов с одиночным маяком: Канальная оценка может делаться только на частоте одиночного маяка. Так как не имеется никакой информации/оценки в отношении изменчивости канала по ретрансляционному диапазону, для компенсации предполагается, что одиночное комплексное значение (или импульсная характеристика) является постоянным по всему частотному диапазону. Это имеет низкую сложность, так как применяется только один приемопередатчик маяков в 60G в расчете на ретранслируемый сигнал.
- Блоки сигналов с двумя маяками: Канальная оценка может делаться посредством интерполяции по ретрансляционной полосе пропускания, где используются комплексные канальные оценки из нижнего и верхнего маякового сигнала. Таким образом, умеренная канальная изменчивость по частоте может оцениваться и компенсироваться посредством корректировки. Таким образом, может достигаться более хорошая точность оценки, чем в случае блоков сигналов с одиночным маяком. Эта схема имеет среднюю сложность, так как два синхронизированные приемника маяков (или пути приема) в 60G применяются в расчете на ретранслируемый сигнал для восходящей линии связи и соответствующее количество передатчиков для нисходящей линии связи, оба потенциально исполняются параллельно. Поэтому, учитывается изменяющееся во времени изменение канала по частоте, где все еще ожидается малое ухудшение, которое проистекает из того факта, что только линейная интерполяция по частоте может не охватывать реальное поведение канала.
- Блоки сигналов с множеством маяков (с одной и той же, разными, или адаптивной структурой сигнала): Сложная интерполяция между несколькими комплексными значениями по частоте для компенсации, например, посредством адаптации полиномов более высокого порядка. Также могут вычисляться решения наименьших квадратов (LS) для полиномов более высокого порядка, в случае более большого количества доступных канальных оценок из блоков сигналов с множеством маяков, чем необходимо, например, в переопределенной системе. Эта схема имеет сложность от средней до высокой для SUDAC и UE, так как применяются несколько синхронизированных передатчиков/приемников маяков 60G. Согласно дополнительному варианту осуществления, схема имеет среднюю сложность, если могут использоваться спектральные повторения одного и того же маякового сигнала из цифроаналогового преобразования для генерирования в сигнале с множеством маяков (идентичные сигналы во всех маяковых поднесущих), или если два маяковых сигнала с множеством несущих передаются посредством двух путей передачи.
- Блоки сигналов с маяками суперпозиции:
Канальная оценка с использованием блоков сигналов с маяками суперпозиции имеет среднюю сложность при применении способов, описанных на фиг. 15, относящихся к подходу b) или c), так как это может вести к такому же уровню сложности, как в случае блоков сигналов с множеством маяков. Наиболее точные канальные оценки могут достигаться по двум причинам: Во-первых, расстояние интерполяции в ретрансляционной полосе пропускания уменьшается здесь только до доли этой полосы пропускания, что улучшает точность канальной оценки по отношению к другим способам выше. И во-вторых, маяковые сигналы не возмущаются посредством сигнала полезной нагрузки, что бы действовало как помехи.
Согласно варианту осуществления, относящемуся к подходу a), описанному по отношению к фиг. 15, канальная оценка может затрачивать более большие усилия по вычислению для устранения помех.
Дополнительно, сдвинутая структура пилот-сигнала маяковых сигналов, показанная на фиг. 16 и фиг. 17, имеет то преимущество, что более усовершенствованная схема двумерной интерполяции (то есть, одновременная оценка во времени и частоте) будет давать усиление над схемой дважды одномерной интерполяции (то есть, отдельная оценка во времени и частоте). Если, например, маяковый сигнал 1 и 2 будет идентично выровнен во времени, схема двумерной интерполяции может иметь производительность только как схема дважды одномерной интерполяции, которая известна из канальной оценки в системах OFDM.
Помимо других этапов синхронизации и обработки, UE может осуществлять два этапа для канальной оценки и корректировки согласно одному варианту осуществления:
1. Канальная оценка и компенсация на основе маяковых сигналов по двум причинам:
- Демодуляция полей конфигурационных данных маякового сигнала (сигналов) целевого блока (блоков) сигналов.
- Оценка быстро изменяющихся со временем комплексных канальных коэффициентов, которые являются действительными на частотах маяковых сигналов в области 60G.
Во-первых, канальная оценка делается для каждого принятого поля пилот-сигнала, где применяемый способ зависит от выбранной волновой формы для маякового сигнала, от целевой длины канальной импульсной характеристики и уровня точности.
Во-вторых, осуществляется интерполяция канальных оценок во временном направлении по полям данных маяка и в частотном направлении в ретрансляционной полосе пропускания. Канальные оценки в полях данных маяка применяются, чтобы успешно корректировать и демодулировать переносимые данные конфигурации и управления. Канальные оценки из интерполяции по времени и частоте могут использоваться, чтобы корректировать сигнал полезной нагрузки ретрансляционной полосы пропускания. Для этой цели, интерполяция может адаптировать канальные оценки к частоте дискретизации, которая напрямую относится к ретранслируемому сигналу полезной нагрузки. Более широко, интерполяция адаптирует/соотносит канальные оценки из полей пилот-сигналов маякового сигнала к (другой) сетке ресурсов t-f-c-s ретранслируемого сигнала полезной нагрузки.
Этот модульный подход применяется параллельно ко всем ретрансляционным каналам, то есть множеству экземпляров оценки, интерполяции и компенсации/корректировки.
Фиг. 19 показывает иллюстративную объединенную обработку полей пилот-сигналов из двух маяковых сигналов, где структура полей пилот-сигналов выровнена в маяковом сигнале 1 и 2. Здесь, объединенная обработка полей пилот-сигналов для канальной оценки (и оценки CFO) может альтернативно выполняться при интерпретировании маяковых сигналов (например, на разных частотах) как одиночного сигнала с неравномерным распределением мощности по частоте. В этом варианте осуществления, является возможным увеличивать временное разрешение оцененной канальной импульсной характеристики, то есть, по отношению к разрешению задержек пути канала, по сравнению со стандартным случаем относящегося к скорости передачи символов разрешения канальной оценки от канальной оценки в расчете на маяк. Тем не менее, все еще может применяться интерполяция во временном направлении. Является более практичным для этого подхода иметь несмещенную, но выровненную структуру полей пилот-сигналов. В частности, это включает в себя постоянно синхронную передачу полей пилот-сигналов, где один маяковый сигнал сдвинут на половину продолжительности символа (=T/2). Эта объединенная обработка полей 220 пилот-сигналов маякового сигнала из разных маяковых сигналов 175, 200 улучшает канальную оценку и оценку CFO. Если данные конфигурации и управления внутри полей данных маякового сигнала также выровнены, объединенное обнаружение полей 225 данных конфигурации и управления будет улучшать устойчивость и/или точность.
Если SUDAC с более, чем одним ретрансляционным путем нисходящей линии связи передает свои данные полезной нагрузки в UE, блоки сигналов должны располагаться по частоте настолько близко, насколько возможно. Это из-за того, что более усовершенствованная схема канальной оценки может учитывать этот набор маяковых сигналов (из разных блоков сигналов, но одного и того же SUDAC и, поэтому, очень похожих каналов) как схему с множеством маяков и увеличивать точность канальной оценки дополнительно в противоположность обработке в расчете на блок сигналов.
В специальном случае пилот-сигналов суперпозиции со сдвигом поддиапазонов, как визуализировано на фиг. 27, UE может осуществлять широкополосную обработку с использованием всех маяковых сигналов для объединенной обработки. В качестве альтернативы, UE может осуществлять отдельную параллельную обработку в расчете на каждую ретрансляционную полосу пропускания посредством использования соседних маяков.
2. Канальная оценка и компенсация на основе полей пилот-сигналов ретранслируемого сигнала применяются после компенсации быстро изменяющегося канала на стадии 1 также как дополнительные этапы синхронизации над сигналом полезной нагрузки, например, оценка и компенсация доплеровского сдвига канала серверной стороны . Так как ретранслируемые сигналы полезной нагрузки включают в себя достаточное количество пилот-сигналов, чтобы корректировать канал серверной стороны, испытываемый в мобильной радиосистеме, могут применяться общие подходы, которые зависят от системы, но обычно уже установлены (например, для GSM, UMTS, LTE, и т.д.).
В последующем, рассматриваются два варианта осуществления, касающиеся первого этапа канальной оценки и корректировки для вышеизложенного введенного примера маякового сигнала с одиночной несущей с линейной модуляцией.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ, ИСПОЛЬЗУЮЩИЕ ОДИН КОМПЛЕКСНЫЙ КАНАЛЬНЫЙ КОЭФФИЦИЕНТ В РАСЧЕТЕ НА ПОЛЕ ПИЛОТ-СИГНАЛА
Для вышеизложенного введенного примера маякового сигнала с одиночной несущей с линейной модуляцией, корреляция с исходной последовательностью пилот-сигналов будет давать одиночную комплексную канальную оценку при максимуме корреляции. Это представляет точную оценку, если канал демонстрирует незначительный разброс задержки.
После оценки полей пилот-сигналов (то есть, канальных оценок, действительных для конкретных элементов ресурсов t-f-c-s), может выполняться задача интерполяции. Имеется большое многообразие способов. Некоторыми примерами являются:
- Способы линейной интерполяции по сетке ресурсов t-f-c-s. Наиболее тривиальный способ из этого класса состоит в том, чтобы применять постоянную канальную оценку на сетке ресурсов t-f-c-s. Также имеет низкую сложность применение усреднения или адаптации линейных фильтров.
- В случае множества маяковых сигналов, может использоваться подход наименьших квадратов (LS), чтобы адаптировать коэффициенты полинома более высокого порядка для интерполяции, который имеет ценность в переопределенной системе с более большим количеством внедренных оценок, чем полиномиальные коэффициенты.
- Имеются способы канального отслеживания для непрерывной адаптации/обновления параметров предполагаемой канальной модели с наиболее недавними канальными оценками. Из модели тогда могут выводиться результаты интерполяции или даже прогноза/предсказания. Точность сильно зависит от несоответствия модели по отношению к реальности.
После задачи интерполяции, одним возможным представлением канальной оценки является канальная передаточная функция частотной области. Она может использоваться для корректировки частотной области, чьи коэффициенты выводятся из канальной передаточной функции.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ДЛЯ КАНАЛЬНОЙ ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ СО ЗНАЧИТЕЛЬНЫМ РАЗБРОСОМ ЗАДЕРЖКИ
Если истинный канал демонстрирует значительный разброс задержки, его канальная импульсная характеристика состоит из сигнала линии видимости (LOS) и нескольких отборов задержки. Оценка может, например, выполняться посредством модуля оценки максимального правдоподобия, который применяет умножение вектора-матрицы в расчете на поле пилот-сигнала.
Имея оценку канальной импульсной характеристики в расчете на поле пилот-сигнала, может применяться интерполяция по сетке ресурсов t-f-c-s. В общем, способы из варианта 1 осуществления могут использоваться на каждом индивидуальном комплексном значении канальной импульсной характеристики.
После этого, можно снова использовать вышеупомянутый способ вычисления полной канальной передаточной функции и использовать ее для корректировки в частотной области. Альтернативно, можно разделять диапазон на поддиапазоны и предполагать равномерное затухание в каждом поддиапазоне. Затем, индивидуальная корректировка поддиапазонов может выполняться на основе результатов интерполяции, предполагаемых как постоянные в расчете на поддиапазон.
Другой способ может относиться к разделению корректировки на часть фазовой компенсации (см. вариант 1 осуществления, один комплексный коэффициент изменяется быстро во времени и малая модификация по частоте) и часть компенсации многолучевого пути (канальная импульсная характеристика, изменяющаяся также быстро во времени, но одна канальная импульсная характеристика является действительной для всего ретрансляционного частотного диапазона).
Вышеупомянутые способы канальной оценки и корректировки также могут расширяться на итеративные подходы согласно принципу турбо корректировки. Тогда вышеупомянутые способы представляют начальный этап для начала алгоритма турбо корректировки.
Так как это является базовой идеей описанных вариантов осуществления, снова указывается двухэтапный подход канальной оценки и корректировки, во-первых, чтобы компенсировать эффекты канала 60G, где используются маяковые сигналы, и во-вторых компенсировать эффекты канала s6G посредством функциональных возможностей/структуры сигнала полезной нагрузки. Дополнительно, интерполяция канальной оценки в ретрансляционной полосе пропускания (или ее частях в случае пилот-сигналов суперпозиции) является предпочтительной согласно некоторым вариантам осуществления. Дополнительные варианты осуществления описывают объединенную обработку полей пилот-сигналов и полей данных.
КАНАЛЬНАЯ ОЦЕНКА НА СТОРОНЕ SUDAC
Передача данных компонентов SUDAC может относиться только к маяковым сигналам (достаточно малой полосе пропускания по сравнению с ретранслируемым сигналом), где данные конфигурации и управления отправляются оборудованиями UE в SUDAC (и наоборот) как было показано в предыдущих разделах, то есть принимается (или передается) обратный канал управления. Поэтому, SUDAC может быть способен принимать и корректировать маяковый сигнал корректно. В этом варианте осуществления, SUDAC не осуществляет никакой канальной оценки по ретрансляционной полосе пропускания как UE.
Хотя в этом разделе рассматриваются маяковые сигналы нисходящей линии связи, обратный канал управления также может приниматься компонентом SUDAC из маяковых сигналов, сопровождающих ретранслируемые сигналы восходящей линии связи.
Для канальной оценки для обнаружения маяковых сигналов, может быть достаточным предполагать незначительный разброс задержки, то есть, только один комплексный коэффициент, который может изменяться потенциально быстро во времени. Таким образом, поля пилот-сигналов могут быть достаточно плотными, чтобы осуществлять интерполяцию по полям данных маякового сигнала. В зависимости от концепции системы, определяющей то, какое устройство передает поля пилот-сигналов, ассоциированные с целевыми полями данных маякового сигнала, следующие два разных подхода согласно вариантам осуществления дают результатом:
1. UE передает поля пилот-сигналов
В последствии, SUDAC может осуществлять канальную оценку на основе принятых полей пилот-сигналов и выполняет интерполяцию по времени вследствие присутствия полей данных маяка. С этим результатом канальной оценки, канальное искажение может компенсироваться посредством корректировки. Это указывает на ту же схему, описанную выше для UE. Этот вариант осуществления может затрачивать некоторые усилия по обработке на стороне SUDAC.
2. SUDAC передает поля пилот-сигналов
Как показано в варианте осуществления, показанном, например, на фиг. 16, SUDAC передает поля пилот-сигналов. На основе этих полей пилот-сигналов, пользовательское оборудование осуществляет канальную оценку, которое может осуществляться в любом случае вследствие применяемой корректировки ретранслируемых данных полезной нагрузки. Таким образом, пользовательское оборудование может использовать свои результаты оценки, чтобы осуществлять предварительную компенсацию/корректировку своих сигналов управления и полезной нагрузки. Таким образом, SUDAC может работать без канальной оценки и корректировки. Тем не менее, поля данных маякового сигнала могут иметь также некоторые малые поля пилот-сигналов, чтобы гарантировать корректную демодуляцию важных данных управления компонентом SUDAC. В заключение, UE делает большую часть работы корректировки на основе полей пилот-сигналов, переданных компонентом SUDAC. И SUDAC затрачивает относительно малые усилия, чтобы использовать малые поля пилот-сигналов, которые являются присущими полям данных маякового сигнала.
Этот совместный подход к канальной оценке и предварительной компенсации на стороне UE для большей части работы корректировки и использования "пилот-сигналов полей данных маяковых сигналов" компонентом SUDAC для точной корректировки является предпочтительным. Согласно этому варианту осуществления, могут использоваться существующие аппаратные ресурсы, например, в пользовательском оборудовании, и осуществление дополнительных аппаратных ресурсов может минимизироваться.
КАНАЛЬНАЯ ОЦЕНКА ДЛЯ ЧАСТИ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ: ПОЛЬЗОВАТЕЛЬСКОЕ ОБОРУДОВАНИЕ - SUDAS - БАЗОВАЯ СТАНЦИЯ
Согласно вариантам осуществления, базовая станция является не способной оценивать и корректировать быстрые изменения фазы области 60G (вследствие канальных эффектов распространения, таких как доплеровский сдвиг). Дополнительно, все сигналы передачи от всех компонентов SUDAC в базовую станцию будут располагаться в суперпозиции в одном и том же диапазоне s6G. Если маяковые сигналы также передавались бы в базовую станцию, они бы также располагались в суперпозиции как сигнал восходящей линии связи полезной нагрузки и не могли бы подходить для передачи s6G (не соответствие стандарту передачи данных или даже создание помех для других сигналов восходящей линии связи s6G других оборудований UE).
Потенциальные исправления:
- Предварительная компенсация в пользовательском оборудовании, так как обработка сигналов может осуществляться там в любом случае. В последующем описываются два варианта выбора для осуществления концепции:
a. Быстрая обратная связь оценок фазы от SUDAC в пользовательское оборудование. SUDAC является способным оценивать фактические комплексные канальные коэффициенты из маякового сигнала (сигналов), отправленного пользовательским оборудованием. Является предпочтительной быстрая передача по обратной связи этих оценок посредством маякового сигнала, чтобы не иметь устаревшие канальные оценки для предварительной компенсации.
b. Фиг. 20 показывает иллюстративные маяковые сигналы одного SUDAC, обслуживающего один ретрансляционный путь нисходящей линии связи и один ретрансляционный путь восходящей линии связи в режиме дуплексирования с частотным разделением (FDD), по отношению к ретранслируемым данным полезной нагрузки, которые относятся к режиму дуплексирования мобильной сети. Пользовательское оборудование передает только сигнал восходящей линии связи, подлежащий ретрансляции, но не поля пилот-сигналов маякового сигнала. SUDAC передает поля 220 пилот-сигналов маякового сигнала внутри маяковых сигналов 175, 200, относящихся к используемой ретрансляционной полосе 185 пропускания пользовательским оборудованием, как показано на фиг. 16 и фиг. 20. Пользовательское оборудование использует эти поля 220 пилот-сигналов маякового сигнала, чтобы оценивать комплексные канальные коэффициенты и вычисляет предварительную компенсацию. Если блоки сигналов восходящей линии связи и нисходящей линии связи являются настолько близкими как на фиг. 20, объединенная канальная оценка, интерпретирующая это как сигнал с множеством маяков, может обеспечивать более хорошую точность оценки, чем раздельная канальная оценка восходящей линии связи и нисходящей линии связи. Таким образом, является предпочтительным, чтобы не имелось никакой явной линии связи для обратной связи, применяемой как в a., и вероятность использования устаревших данных зависит только от скорости обработки пользовательского оборудования. Для этого подхода предполагается, что является действительной приблизительная канальная взаимность восходящей линии связи и нисходящей линии связи в 60G.
- Каждый SUDAC пересылает принятые пилот-сигналы в 60G посредством отдельной согласующейся с s6G линии связи в базовую станцию, где могут применяться более усовершенствованные способы обработки. Снова, двухкаскадный подход канальной оценки и корректировки может применяться как в предыдущих разделах благодаря количеству приемных антенн в базовой станции. Этому варианту осуществления могут обеспечиваться дополнительные ресурсы в диапазоне s6G также как стандартизация, такая как, что все BS понимают восходящую линию связи s6G компонентов SUDAC.
По существу, все эти способы компенсации могут компенсировать оставшиеся изменения фазы и амплитуды вследствие канальных искажений интерфейсной стороны после компенсации фактических частотных сдвигов области 60G, например, включающих в себя доплеровские сдвиги , , и в случае трех ретрансляционных путей восходящей линии связи компонентов SUDAC.
Фиг. 21 показывает маяковые сигналы одного SUDAC, обслуживающего один ретрансляционный путь для нисходящей линии связи и восходящей линии связи в режиме дуплексирования с временным разделением (TDD), по отношению к ретранслируемым данным полезной нагрузки, которые относятся к режиму дуплексирования мобильной сети. Режим TDD, показанный на фиг. 21, представляет альтернативный режим к режиму FDD, показанному на фиг. 20. Варианты осуществления из фиг. 20 и фиг. 21 могут быть предпочтительными вариантами осуществления, хотя UE может передавать и предварительно компенсировать сигнал восходящей линии связи для каждого SUDAC одновременно. Тем не менее, это упрощает концепцию передачи дуплексирования с временным разделением (TDD), как показано на фиг. 21, так как пользовательское оборудование может непрерывно оценивать канал передачи 60G и выбирает только между использованием этих оценок: предварительную корректировку для передачи восходящей линии связи или корректировку для нисходящей линии связи. Конечно, защитные полосы пропускания в режиме TDD и  , , и
, , и  в режиме FDD могут аккуратно выбираться, чтобы иметь достаточную изоляцию сигналов передачи и приема.
в режиме FDD могут аккуратно выбираться, чтобы иметь достаточную изоляцию сигналов передачи и приема.
Отметим, что является возможным в альтернативном варианте осуществления использовать схему из фиг. 20 для TDD. В этом случае, SUDAC обеспечивает передачу данных FDD по линии связи интерфейсной стороны, где ретранслируемый сигнал восходящей линии связи и ретранслируемый сигнал нисходящей линии связи, предназначенные для сети мобильной связи TDD, разделены по частоте. Хотя это может использовать более большую полосу пропускания на интерфейсной стороне, но может иметь преимущества для осуществления: Переключение направления передачи для TDD должно выполняться в SUDAC, но это может делаться на дружественных к обработке частотах вместо крайне высоких частот для подхода из фиг. 21. Таким образом, дорогостоящее устройство переключения для крайне высоких частот может пропускаться.
Предпочтительный вариант осуществления может содержать следующие этапы обработки:
- Поля пилот-сигналов маякового сигнала передаются компонентом SUDAC - независимо от ретрансляции восходящей линии связи или нисходящей линии связи, как описано ранее.
- UE выполняет непрерывную канальную оценку на основе полей пилот-сигналов маякового сигнала.
-- В случае сети мобильной связи TDD, использование результата оценки может переключаться между предварительной компенсацией/предварительной корректировкой в случае передачи восходящей линии связи (сигнала полезной нагрузки для ретрансляции восходящей линии связи или полей данных маяка) и корректировкой принимаемых сигналов нисходящей линии связи (ретранслируемого сигнала полезной нагрузки нисходящей линии связи или полей данных маяка). Это было описано по отношению к фиг. 21.
-- В случае сети мобильной связи FDD, увеличенная точность канальной оценки может выводиться в UE в случае близких каналов восходящей линии связи и нисходящей линии связи, как описано по отношению к фиг. 20.
-- Дополнительно, вышеописанный альтернативный вариант осуществления использования передачи данных интерфейсной стороны согласно фиг. 20 также может выполнять передачу данных серверной стороны с сетью мобильной связи TDD.
В заключение, эта схема имеет два преимущества:
- SUDAC затрачивает минимум усилий по обработке, что ведет к уменьшенным требованиям к аппаратному обеспечению и в конечном счете к получению более дешевого устройства SUDAC.
- Энергетически эффективная концепция, так как большинство потребляющих энергию элементов являются усилителями мощности передачи. Так как SUDAC наиболее вероятно соединен с общим источником питания, потребление энергии для передачи маяковых сигналов не является проблемой. И приводимое в действие аккумулятором пользовательское оборудование использует свои усилители мощности только для данных состояния/управления или для передачи восходящей линии связи.
Тем не менее, в общем, является также возможным менять роли компонента SUDAC и пользовательского оборудования в вышеизложенной сформулированной концепции. То есть пользовательское оборудование будет постоянно передавать поля пилот-сигналов маякового сигнала и SUDAC будет осуществлять частотное смещение несущей (CFO) и канальную оценку также как (предварительную) компенсацию.
ОБЪЕДИНЕННАЯ БЛОК-СХЕМА ОЦЕНКИ CFO И КАНАЛЬНОЙ ОЦЕНКИ
Так как мы обнаружили, что двухэтапный подход являлся предпочтительным для оценки частотного смещения несущей (CFO) и для части канальной оценки, важно знать, что в случае обработки сигналов приема может соблюдаться следующий порядок применения:
1. Во время сбора данных: Оценка и компенсация грубого CFO, главным образом вызванного смещением локального осциллятора (LO).
2. Оценка CFO и компенсация интерфейсной стороны, которая повторно используется также для обработки сигналов передачи (предварительной компенсации).
3. Канальная оценка и компенсация интерфейсной стороны, которая повторно используется также для обработки сигналов передачи (предварительной компенсации).
4. Оценка CFO и компенсация серверной стороны
5. Канальная оценка и компенсация серверной стороны
Фиг. 22 показывает схематическую блок-схему блоков обработки сигналов в пользовательском оборудовании для осуществления связи с компонентами SUDAC. Общие модули обработки, например, для временной синхронизации и полосовых фильтров также как преобразования с понижением/повышением (из/в крайне высокие частоты в/из дружественных к обработке частот), пропущены ради простоты. Фиг. 22 дает индикацию в отношении взаимодействий из этапов 2-5. В верхней части, имеется путь обработки сигналов приема и в нижней части часть обработки сигналов передачи.
Согласно этому варианту осуществления, часть обработки сигналов приема содержит модуль 240a извлечения, например, демультиплексор, который сконфигурирован с возможностью извлекать маяковый сигнал 242 из принятого сигнала, состоящего из маяковых сигналов и ретранслируемого сигнала полезной нагрузки. Модуль 17 оценки частотного смещения несущей (CFO) на основе пилот-сигналов вычисляет оценки CFO  247 посредством оценки полей пилот-сигналов (то есть, сигнала оценки интерфейсной стороны) маякового сигнала 242. После гладкой интерполяции во времени, осциллятор с числовым управлением (NCO) 255 генерирует сигнал вращения фазы
247 посредством оценки полей пилот-сигналов (то есть, сигнала оценки интерфейсной стороны) маякового сигнала 242. После гладкой интерполяции во времени, осциллятор с числовым управлением (NCO) 255 генерирует сигнал вращения фазы  257. Сигнал 257 умножается на принятый сигнал (то есть, входящий сигнал) с использованием мультипликатора 260, чтобы компенсировать CFO. После коррекции CFO, теперь CFO-скорректированный маяковый сигнал 265 снова извлекается модулем 240b извлечения. Модуль 20 канальной оценки интерфейсной стороны вычисляет канальные коэффициенты
257. Сигнал 257 умножается на принятый сигнал (то есть, входящий сигнал) с использованием мультипликатора 260, чтобы компенсировать CFO. После коррекции CFO, теперь CFO-скорректированный маяковый сигнал 265 снова извлекается модулем 240b извлечения. Модуль 20 канальной оценки интерфейсной стороны вычисляет канальные коэффициенты  267 из маякового сигнала 265. Канальные коэффициенты
267 из маякового сигнала 265. Канальные коэффициенты  используются модулем 21 корректировки интерфейсной стороны, чтобы обеспечивать скорректированный входящий сигнал 275, откуда скорректированный маяковый сигнал 280 и скорректированный ретранслируемый сигнал 285 полезной нагрузки извлекаются с помощью модуля 240c извлечения. Скорректированный ретранслируемый сигнал 285 полезной нагрузки дополнительно обрабатывается посредством оценки CFO и компенсации 290 серверной стороны и канальной оценки и корректировки 295 MIMO серверной стороны. Отметим, что 290 и 295 также принимают другие ретранслируемые сигналы серверной стороны от экземпляров передачи данных как на фиг. 22, также как напрямую принимаемые сигналы серверной стороны в UE, чтобы выполнять объединенную/совместную обработку. Процессор 300 маяковых сигналов принимает скорректированный маяковый сигнал 280 и может управлять генератором 305 полей данных маякового сигнала, чтобы создавать маяковый сигнал 307 (по меньшей мере, содержащий данные управления и конфигурации), который передается по правильному ресурсу t-f-c-s.
используются модулем 21 корректировки интерфейсной стороны, чтобы обеспечивать скорректированный входящий сигнал 275, откуда скорректированный маяковый сигнал 280 и скорректированный ретранслируемый сигнал 285 полезной нагрузки извлекаются с помощью модуля 240c извлечения. Скорректированный ретранслируемый сигнал 285 полезной нагрузки дополнительно обрабатывается посредством оценки CFO и компенсации 290 серверной стороны и канальной оценки и корректировки 295 MIMO серверной стороны. Отметим, что 290 и 295 также принимают другие ретранслируемые сигналы серверной стороны от экземпляров передачи данных как на фиг. 22, также как напрямую принимаемые сигналы серверной стороны в UE, чтобы выполнять объединенную/совместную обработку. Процессор 300 маяковых сигналов принимает скорректированный маяковый сигнал 280 и может управлять генератором 305 полей данных маякового сигнала, чтобы создавать маяковый сигнал 307 (по меньшей мере, содержащий данные управления и конфигурации), который передается по правильному ресурсу t-f-c-s.
Дополнительно, для части обработки сигналов передачи, генератор 310 сигналов восходящей линии связи серверной стороны создает сигнал 315 полезной нагрузки восходящей линии связи. Этот сигнал 315 полезной нагрузки восходящей линии связи мультиплексируется с маяковым сигналом 307. После предварительного кодирования/предварительной корректировки интерфейсной стороны с помощью модуля 325 предварительного кодирования интерфейсной стороны с использованием канальных коэффициентов 267 для предварительной канальной компенсации, предварительно кодированный сигнал вращается по фазе для предварительной компенсации предполагаемого CFO посредством умножения на сигнал вращения фазы 257 с использованием мультипликатора 260. Теперь предварительно скомпенсированный исходящий сигнал 60 может отправляться в SUDAC.
В расчете на каждый используемый SUDAC, такой экземпляр, показанный в блок-схеме, может осуществляться в UE, где показанные компоненты 290, 295, и 310 могут совпадать или могут соединяться для обмена информацией. Этот вариант осуществления показан на фиг. 23.
Благодаря предварительной компенсации CFO интерфейсной стороны и канала интерфейсной стороны, SUDAC затрачивает только малые усилия по обработке сигналов, что делает устройство более дешевым.
Так как пользовательское оборудование уже обладает значительной вычислительной мощностью (вследствие функциональных возможностей обработки с множеством входов, множеством выходов (MIMO)), вышеупомянутая сформулированная обработка сигналов наиболее вероятно выполняется в пользовательском оборудовании. Тем не менее, должно быть ясно, как перестроить блок-схему из фиг. 22, для случая выполнения обработки сигналов в SUDAC, когда пользовательское оборудование постоянно передает поля пилот-сигналов маякового сигнала.
Фиг. 23 показывает схематическую блок-схему блоков обработки сигналов в пользовательском оборудовании для осуществления связи с тремя компонентами SUDAC. Фиг. 23 является расширением варианта осуществления, описанного на фиг. 22. Фиг. 23 содержит три пути обработки. Каждый из путей обработки может быть способным осуществлять связь с SUDAC. Обработка сигналов согласно варианту осуществления, показанному на фиг. 23, является аналогичной по отношению к обработке сигналов, описанной на фиг. 22. Дополнительно, могут применяться одиночная или комбинированная (объединенная) оценка CFO и компенсация (290) серверной стороны и комбинированная или объединенная канальная оценка и корректировка (MIMO) серверной стороны (295). Дополнительно, согласно фиг. 4, пользовательское оборудование может содержать антенну для передачи данных s6G, чтобы напрямую принимать сигналы или данные от базовой станции. Поэтому, упрощенный путь приема без обработки сигналов канала интерфейсной стороны, как показано на фиг. 4, может добавляться к варианту осуществления из фиг. 23.
СЖАТИЕ
Фиг. 24А-Е показывают схематические блок-схемы блоков обработки сигналов для обработки сжатых сигналов в пользовательском оборудовании 10 и SUDAC 30. Ради простоты, кодер 67 и декодер 69 стороны UE показаны на фиг. 3, но пропущены на фиг. 24А-Е. Декодер 69 указывает на распаковку/декодирование стороны UE (для нисходящей линии связи), напрямую управляемое процессором 68 параметров сжатия. Кодер 67 указывает на сжатие/кодирование стороны UE (для восходящей линии связи), напрямую управляемое процессором 68 параметров сжатия.
Фиг. 24А показывает один вариант осуществления настоящего изобретения. SUDAC 30 сжимает и квантует сигнал, принимаемый из линии связи серверной стороны в диапазоне ультравысоких частот, с использованием кодера 93 и пересылает сжатый и квантованный сигнал по линии связи интерфейсной стороны в диапазоне крайне высоких частот в UE 10, так что количество символов, пересылаемых по линии связи интерфейсной стороны, уменьшается по отношению к случаю без сжатия и квантования. Все или часть параметров, которые SUDAC 30 использует для этой обработки сжатия и квантования вычисляются в UE 10 на основе сигнала интерфейсной стороны, принятого от этого SUDAC, и/или на основе дополнительных сигналов серверной стороны, принятых в диапазоне ультравысоких частот посредством внутренних антенн оборудования UE, или из дополнительных сигналов интерфейсной стороны, принятых в диапазоне крайне высоких частот от дополнительных компонентов SUDAC. Поэтому, пользовательское оборудование 10 содержит сигнальный процессор 68, который может принимать информацию посредством пути 2400 от внутренних антенн оборудования UE или от дополнительных компонентов SUDAC 30 и который может передавать информацию посредством пути 2405 в дополнительные компоненты SUDAC 30. Сжатие/кодирование стороны SUDAC (для нисходящей линии связи) 93 может удаленно управляться процессором 68 параметров сжатия.
UE может, тем самым, оптимизировать сжатие и квантование в SUDAC, так что полная производительность для сквозной передачи данных для оборудования UE оптимизируется, при учете канальных характеристик всех путей передачи в передаче MIMO.
В одном варианте осуществления, сжатие и квантование, имеющее место в SUDAC, содержит устройство векторного квантования, и UE обеспечивает параметры, используемые для векторного квантования, такие как используемые решеточные параметры и количество уровней квантования.
В другом варианте осуществления настоящего изобретения, сжатие и квантование основывается на кодовой книге, где вычисляется проекция сигнала серверной стороны, принятого в SUDAC, на разные элементы кодовой книги, наилучшим образом соответствующая запись кодовой книги выбирается и ее представитель передается в UE и дополнительно сигнал разности остатка между принятым сигналом и выбранным элементом кодовой книги сжимается и квантуется.
Фиг. 24В показывает один дополнительный вариант осуществления, где функции сжатия и квантования разделены на два устройства 93a, 93b в SUDAC 30, и каждое принимает все или часть его параметров от UE 10 на основе аналогичных вычислений параметров в сигнальном процессоре 68.
Фиг. 24С показывает другой вариант осуществления. Устройство сжатия содержит (конфигурируемый) фильтр 93a, который может, например, осуществлять линейную фильтрацию согласно критерию минимальной среднеквадратической ошибки (MMSE). Часть или все из вычисления коэффициентов фильтра на основе этого критерия MMSE осуществляется в UE 10 с использованием сигнального процессора 68. Критерий MMSE может, например, быть, чтобы фильтровать сигнал серверной стороны таким образом, чтобы сигналы от одной или множества антенн базовой станции выводились с максимальным отношением сигнала к шуму плюс помехи (SNIR) после фильтра и до сжатия, где сигналы от других антенн базовой станции могут рассматриваться как помехи для этого вычисления.
Фиг. 24D показывает еще другой вариант осуществления, где фильтр устройства 93a сжатия может осуществлять предсказание сигнала для отбеливания принятого сигнала серверной стороны, где сжатие содержит фильтр предсказания и необязательно элемент задержки для предсказания следующего отсчета принятого сигнала серверной стороны, в котором коэффициенты фильтра вычисляются оборудованием UE.
Фиг. 24Е показывает один дополнительный вариант осуществления, где SUDAC 30 выполняет распаковку (в декодере 94) сигналов, которые были сжаты оборудованием UE 10 и которые приняты по линии связи интерфейсной стороны в диапазонах крайне высоких частот от UE 10, где параметры, требуемые для распаковки, вычисляются оборудованием UE 10 и пересылаются в SUDAC 30 по линии связи интерфейсной стороны. Тип сжатия, который должен распаковываться, может быть любым из типов, описанных выше для противоположного случая, когда сжатие происходит в SUDAC. Вычисление параметров сжатия (распаковки) снова основывается на характеристиках разных путей каналов MIMO в диапазоне ультравысоких частот, которые оканчиваются на антеннах базовой станции с одной стороны и на внутренних антеннах оборудования UE или на антеннах серверной стороны компонентов SUDAC с другой стороны. Параметры сжатия (распаковки) могут снова вычисляться в сигнальном процессоре 68. Другими словами, распаковка/декодирование стороны SUDAC (для восходящей линии связи) 94 может удаленно управляться процессором 68 параметров сжатия.
АДАПТАЦИЯ РЕТРАНСЛЯЦИОННОЙ ПОЛОСЫ ПРОПУСКАНИЯ ДЛЯ ПОЛОСЫ ПРОПУСКАНИЯ НИСХОДЯЩЕЙ ЛИНИИ СВЯЗИ
Фиг. 25 показывает схематический частотный спектр ретранслируемого сигнала, где целевой сигнал 230 полезной нагрузки имеет более малую полосу пропускания, чем ретрансляционная полоса пропускания 185 для ретрансляции сигналов нисходящей линии связи и/или восходящей линии связи. Как показано на фиг. 25, статически осуществленная ретрансляционная полоса пропускания Bретрансляция 185 может также вести к ретрансляции частей соседних сигналов 195 (помех смежных каналов, ACI) также как шума. Если SUDAC поддерживает адаптацию ретрансляционной полосы пропускания, например, посредством установки полосно-пропускающих фильтров с Bпропуск 235 соответственно или посредством изменения Bретрансляция 185, пользовательское оборудование может сигнализировать в компоненты SUDAC соответствующую полосу пропускания сигнала полезной нагрузки и несущую частоту, чтобы управлять SUDAC. Это работает, так как пользовательское оборудование знает о требуемой структуре сигнала, но SUDAC нет. Эта адаптация может реализовываться посредством переключения между разными входными фильтрами разных полос пропускания или фильтрами адаптации. Это может осуществляться в аналоговой или цифровой области или как смешанный подход: например, фильтр ретрансляционной полосы пропускания Bретрансляция 185 в аналоговой области и полосно-пропускающие фильтры 235 с Bпропуск в цифровой области.
Отметим, что между Bретрансляция и Bпропуск делается различие, из-за потенциально разной реализации в одном варианте осуществления: Bпропуск в качестве цифрового адаптивного фильтра и Bретрансляция в качестве полосы пропускания аналогового фильтра, что может соответствовать максимальной полосе пропускания ретрансляционного пути или переключаемым аналоговым фильтрам другой полосы пропускания. Поэтому, SUDAC удаленно настраивается на корректный поддиапазон и полосу пропускания для сценария нисходящей линии связи.
Если не имеется никакой проблемы в усилении и пересылке соседних сигналов и шума, можно использовать более дешевый статический вариант осуществления ретрансляционной полосы пропускания в SUDAC. Так как UE уже имеет средство для должного выбора поддиапазона для осуществления передачи данных s6G, это средство также может применяться к ретранслируемому сигналу после преобразования с понижением из области 60G в базовую полосу.
АДАПТАЦИЯ РЕТРАНСЛЯЦИОННОЙ ПОЛОСЫ ПРОПУСКАНИЯ ДЛЯ ПОЛОСЫ ПРОПУСКАНИЯ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ
Проблема ретрансляции шума (и может быть ACI) является более суровой для восходящей линии связи, как изображено на фиг. 25. Если ретрансляционный путь восходящей линии связи будет иметь статическую полосу пропускания, шум из не назначенных частот 60G (и может быть ACI) внутри диапазона также будет усиливаться и пересылаться в диапазон s6G. По меньшей мере, в случае дуплексирования с частотным разделением (FDD), это будет формировать дополнительное искажение для других восходящих линий связи в близких поддиапазонах восходящей линии связи s6G, которые испытывают этот пересланный шум. Как исправление, пользовательское оборудование может управлять компонентом SUDAC, чтобы настраивать на корректный поддиапазон и полосу пропускания в качестве полосы пропускания частот и чтобы подавлять/блокировать все другие части частотного диапазона восходящей линии связи. Поэтому, SUDAC удаленно настраивается на корректный поддиапазон и полосу пропускания для сценария восходящей линии связи.
ВРЕМЕННАЯ СИНХРОНИЗАЦИЯ (ДИСКРЕТИЗАЦИЯ, РАЗДЕЛЕНИЕ НА КАДРЫ, ПЕРЕКЛЮЧЕНИЕ)
Смещение частоты дискретизации или локального тактового сигнала уже было рассмотрено в предыдущих разделах, из-за близкого отношения частотного смещения несущей к локальному тактовому сигналу.
В случае мобильной сети дуплексирования с временным разделением (TDD), пользовательское оборудование конфигурирует/управляет компонентами SUDAC, чтобы переключаться синхронно между передачей восходящей линии связи и нисходящей линии связи, подлежащей пересылке. Чтобы не возмущать сигналы восходящей линии связи других пользовательских оборудований в их временном слоте посредством пересылки отсчетов шума, SUDAC может иметь третье состояние переключения: отсутствие ретрансляции или отключение. Таким образом, для работы в мобильных сетях TDD, пользовательское оборудование управляет компонентом SUDAC по отношению к общим состояниям:
1. ретрансляция нисходящей линии связи,
2. ретрансляция восходящей линии связи,
3. пауза/отсутствие ретрансляции/контур обратной связи.
Поэтому, SUDAC удаленно синхронизируется с циклом дуплексирования с временным разделением (TDD) также как полосно-пропускающие фильтры переключаются/регулируются.
Независимо от наличия мобильной сети дуплексирования с временным разделением (TDD) или дуплексирования с частотным разделением (FDD), каждый SUDAC может сообщать пользовательскому оборудованию свое максимальное время обработки посредством полей данных конфигурации и управления в маяковых сигналах. Эта информация используется пользовательским оборудованием для вычисления задержки ретранслируемых данных полезной нагрузки нисходящей линии связи и для выравнивания принимаемых потоков данных полезной нагрузки в диапазоне 60G от разных компонентов SUDAC друг с другом и напрямую принимаемого потока данных полезной нагрузки в диапазоне s6G. Поэтому, разные типы компонентов SUDAC могут иметь разные задержки обработки, но докладывать это в пользовательское оборудование для выравнивания задержки.
В случае ретрансляции восходящей линии связи, пользовательское оборудование использует сигнализированные задержки обработки восходящей линии связи компонентов SUDAC, чтобы планировать более раннюю передачу в диапазоне 60G, чем для своей собственной прямой передачи восходящей линии связи в s6G, чтобы соблюдать протоколы и правила мобильной сети.
Это имеет особую важность в случае схемы сжатия и пересылки/декодирования и пересылки (CF/DF), в то время как для усиления и пересылки (AF) ожидается, что задержка является достаточно малой. Более конкретно, пользовательское оборудование и все соединенные компоненты SUDAC синхронизируют их счетчики временных меток посредством полей данных конфигурации и управления в маяковых сигналах, где наиболее вероятно пользовательское оборудование будет эталоном. Затем используют временные метки следующим образом для CF/DF:
- Восходящая линия связи (декодирование и пересылка, DF): В дополнение к данным полезной нагрузки восходящей линии связи, UE сигнализирует в компоненты SUDAC целевую временную метку для передачи компонентом SUDAC. UE будет затем передавать по своей собственной восходящей линии связи s6G в ту же целевую временную метку для передачи, так как все эти сигналы (подлежащие отправке компонентами SUDAC и оборудованием UE) могут быть MIMO предварительно кодированными и, поэтому, синхронная передача является предпочтительной. Эта целевая временная метка для передачи соблюдает максимальные времена обработки всех вовлеченных компонентов SUDAC.
- Нисходящая линия связи (сжатие и пересылка, CF): В дополнение к ретранслируемым данным полезной нагрузки, компоненты SUDAC передают временные метки, когда они принимают пакеты данных полезной нагрузки в частотном диапазоне s6G. Эта информация используется в пользовательском оборудовании, чтобы корректно сортировать/выравнивать все входные потоки данных/пакеты от разных компонентов SUDAC с напрямую принятым потоком данных/пакетами пользовательским оборудованием (UE) в s6G и в конечном счете выполнять корректное декодирование сигнала MIMO.
Поэтому, обработка стороны пользовательского оборудования выравнивает несколько потоков данных/пакетов из 60G по отношению к друг к другу также как с соответствующим потоком данных/пакетами s6G согласно сигнализированным задержкам обработки или временным меткам разных компонентов SUDAC, чтобы удовлетворять протоколы и правила мобильной сети и обеспечивать возможность декодирования сигнала MIMO (блокирует восходящую линию связи и нисходящую линию связи).
СПОСОБЫ ДЛЯ ПОДДЕРЖКИ МНОЖЕСТВА ПОЛЬЗОВАТЕЛЬСКИХ ОБОРУДОВАНИЙ ВНУТРИ SUDAS
До сих пор, рассматривался случай одного пользовательского оборудования в расчете на SUDAS. Однако является очень вероятным, что имеется несколько пользовательских оборудований даже в одном помещении, которые требуют поддержки SUDAS, чтобы увеличивать скорости передачи данных для передачи. Таким образом, непосредственное расширение состоит в том, чтобы назначать компоненты SUDAC исключительно в расчете на пользовательское оборудование, то есть, не пересекающиеся поднаборы компонентов SUDAC в расчете на каждое пользовательское оборудование. Согласно одному варианту осуществления, решение имеет целью обеспечение также совместно используемой услуги SUDAC для нескольких пользовательских оборудований.
СОВМЕСТНО ИСПОЛЬЗУЕМАЯ НИСХОДЯЩАЯ ЛИНИЯ СВЯЗИ (ДЛЯ МОБИЛЬНЫХ СЕТЕЙ ДУПЛЕКСИРОВАНИЯ С ЧАСТОТНЫМ РАЗДЕЛЕНИЕМ (FDD))
Каждый SUDAC может пересылать полный диапазон нисходящей линии связи одного оператора или даже полный диапазон нисходящей линии связи нескольких/всех операторов, что ведет к ретрансляции нескольких десятков МГц из s6G в разные поддиапазоны 60G. Так как SUDAC может не иметь функциональных возможностей для анализа всей ретрансляционной полосы пропускания, пользовательские оборудования будут осуществлять согласование друг с другом и сигнализацию в SUDAC того, где находятся требуемые части спектра также как промежутки в спектре нисходящей линии связи, которые могут использоваться маяками суперпозиции. Согласование применяется, из-за разных функциональных возможностей пользовательских оборудований, чтобы устранять маяки суперпозиции. Индикация по требуемому диапазону помогает или даже напрямую управляет SUDAC для регулировки полосно-пропускающими фильтрами, как описано в предыдущем разделе. Чтобы избегать здесь проблемы скрытых узлов, передача данных между пользовательскими оборудованиями может ретранслироваться компонентом SUDAC, который предполагается обслуживает их.
Фиг. 26 показывает схематический частотный спектр совместно используемого ретрансляционного канала внутри одной и той же ретрансляционной полосы пропускания, который имеет место для ретрансляции сигналов нисходящей линии связи и восходящей линии связи. Согласно этому варианту осуществления, SUDAC обслуживает два пользовательских оборудования. Так как цель состоит в том, чтобы использовать одиночный ретрансляционный путь, упомянутые два целевых сигнала поддерживают их расстояние по частоте Δf во время преобразования с повышением из s6G в область 60G. Упомянутые два адаптированные полосно-пропускающие фильтра с BпропускUE1 и BпропускUE2 подавляют шум и помехи смежных каналов (ACI), так что может назначаться маяк суперпозиции. Вследствие успешного согласования компонента SUDAC и пользовательских оборудований, маяк суперпозиции не должен устраняться в этом иллюстративном случае, так как он не создает помех для ретранслируемых сигналов. Поэтому, SUDAC удаленно уведомляется/управляется, чтобы регулировать полосно-пропускающие фильтры и маяковые сигналы суперпозиции. Может осуществляться согласование между пользовательскими оборудованиями посредством SUDAC (то есть, объединенная кооперативная оптимизация), так как некоторые пользовательские оборудования могут не быть способными осуществлять связь друг с другом напрямую.
СОВМЕСТНО ИСПОЛЬЗУЕМАЯ ВОСХОДЯЩАЯ ЛИНИЯ СВЯЗИ (ДЛЯ МОБИЛЬНЫХ СЕТЕЙ FDD)
Идеи из передачи нисходящей линии связи также как пример на фиг. 26 могут переноситься на совместно используемую ретрансляцию восходящей линии связи. Снова, пользовательские оборудования и SUDAC могут согласовывать назначение спектра ретрансляционной полосы пропускания, чтобы регулировать полосно-пропускающие фильтры, идентифицировать промежутки диапазона для маяков суперпозиции, и также соблюдать расстояние в частоте Δf между сигналами восходящей линии связи, так как Δf является прямым результатом схемы назначения ресурсов для области s6G, сигнализированной от базовой станции в пользовательские оборудования.
Это имеет снова разновидность, что комбинированный диапазон восходящей линии связи может преобразовываться с понижением из 60G в s6G в одиночном ретрансляционном пути и передаваться в базовую станцию. Концепция одновременной отправки полей пилот-сигналов в маяковом сигнале от SUDAC в пользовательские оборудования и отправки предварительно скомпенсированной восходящей линии связи полезной нагрузки от пользовательского оборудования в SUDAC, описанная в предыдущих разделах для случая одного пользовательского оборудования в расчете на SUDAC, может применяться здесь также. Это из-за того, что каждое пользовательское оборудование может предварительно компенсировать свой собственный сигнал полезной нагрузки восходящей линии связи согласно каналу, используемому маяковыми сигналами. Однако альтернативный подход канальной оценки интерфейсной стороны и корректировки/компенсации в SUDAC будет несколько более сложным, так как каждое пользовательское оборудование может отправлять (не пересекающиеся) маяковые сигналы в SUDAC, чтобы оценивать каждый из разных каналов на стороне SUDAC. С помощью цифровой обработки сигналов полезной нагрузки в SUDAC, разные сигналы полезной нагрузки могут корректироваться индивидуально.
Ретрансляционный диапазон восходящей линии связи резервируется одним SUDAC, что является непосредственным случаем. Таким образом, дополнительный SUDAC будет предлагать свой ретрансляционный диапазон восходящей линии связи на другой несущей частоте, нежели первая несущая частота. Пользовательские оборудования могут передавать один и тот же сигнал полезной нагрузки восходящей линии связи, но с разной предварительной компенсацией в упомянутые два компонента SUDAC. Так как пользовательское оборудование может предварительно компенсировать сигнал восходящей линии связи только согласно одному каналу передачи, пользовательские оборудования не могут передавать одновременно в более, чем один SUDAC в одном и том же ретрансляционном диапазоне восходящей линии связи интерфейсной стороны.
Поэтому, компоненты SUDAC удаленно уведомляются/управляются, чтобы регулировать полосно-пропускающие фильтры и маяковые сигналы суперпозиции. Может осуществляться согласование между пользовательскими оборудованиями посредством SUDAC (то есть, объединенная кооперативная оптимизация), так как некоторые пользовательские оборудования могут не быть способными осуществлять связь друг с другом напрямую. В частности, расстояние в частоте Δf между сигналами восходящей линии связи полезной нагрузки может точно выравниваться (посредством согласования) согласно сигналам управления базовой станции.
СОВМЕСТНО ИСПОЛЬЗУЕМАЯ РЕТРАНСЛЯЦИЯ (ДЛЯ МОБИЛЬНЫХ СЕТЕЙ TDD)
Чтобы сравнить совместное использование для TDD и FDD, можно различать:
1. FDD/TDD, где множество пользовательских оборудований используют (время-частотные ресурсные блоки) одной и той же несущей
2. FDD/TDD с множеством пользовательских оборудований, использующих множество несущих одного и того же оператора мобильной сети (то есть, синхронизированное/координированное агрегирование несущих)
3. FDD/TDD по несущим от множества операторов мобильной сети (несинхронизированных)
Для FDD, вышеупомянутые способы работают в случаях 1, 2, и 3, где должное вычисление и выравнивание по частоте по отношению к промежутку диапазона Δf является предпочтительным в случае 3 вследствие разных операторов. Однако совместно используемая ретрансляция в режиме TDD работает только в случаях 1 и 2, где для случая 2 предполагается, что один оператор использует один и тот же цикл переключения TDD на разных несущих частотах. TDD в случае 3 может не работать, так как разные операторы не будут выравнивать их разные циклы переключения TDD (между восходящей линией связи и нисходящей линией связи). Это является проблемой, так как один ретрансляционный путь может относиться только к одиночному циклу переключения TDD.
Поэтому, можно советовать применять два ретрансляционных пути, один осуществляет единственно ретрансляцию восходящей линии связи (2 состояния: ретрансляция восходящей линии связи и пауза/отсутствие ретрансляции) и один осуществляет единственно ретрансляцию нисходящей линии связи (2 состояния: ретрансляция нисходящей линии связи и пауза/отсутствие ретрансляции). Тогда, упомянутые два ретрансляционных пути будут иметь одну и ту же несущую частоту в s6G (по отношению к ретрансляционной полосе пропускания), но разные частоты в 60G. Поэтому, применяется независимое переключение и регулировка полосно-пропускающих фильтров в расчете на ретрансляционный путь (восходящей линии связи или нисходящей линии связи), так как каждое пользовательское оборудование может относиться к разному циклу переключения. В этом режиме применяются выделенные ретрансляционные пути восходящей линии связи или нисходящей линии связи.
Однако одновременный прием и передача на одной и той же несущей частоте в s6G (по отношению к ретрансляционной полосе пропускания) может вести к неблагоприятным перекрестным помехам внутри SUDAC. Это может происходить, хотя назначение ресурсов, которое осуществляется отдельно каждым оператором внутри своего диапазона, не демонстрирует никаких прямых конфликтов.
ДОПОЛНИТЕЛЬНЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
Объединенная CFO и канальная оценка плюс (предварительная) компенсация на стороне UE (для AF)
- SUDAC затрачивает минимум усилий по обработке, что ведет к уменьшенным требованиям к аппаратному обеспечению и в конечном счете получению более дешевого устройства SUDAC.
- Энергетически эффективная концепция, так как большинство потребляющих энергию элементов являются усилителями мощности передачи. Так как SUDAC наиболее вероятно соединен с общим источником питания, потребление энергии для передачи маяковых сигналов не является проблемой. И приводимое в действие аккумулятором пользовательское оборудование может использовать свои усилители мощности только для данных состояния/управления или для передачи восходящей линии связи.
- Каждый поставщик пользовательского оборудования является ответственным за обеспечиваемое качество результата обработки сигналов в 60G, где конкуренция ведет обычно к ценным решениям.
Объединенная CFO и канальная оценка плюс (предварительная) компенсация на стороне SUDAC (для AF)
- В случае восходящей линии связи не-MIMO, UE может передавать один и тот же сигнал полезной нагрузки восходящей линии связи в несколько компонентов SUDAC и не индивидуально в каждый SUDAC, так как канальная оценка и корректировка осуществляется на стороне SUDAC. Однако это не имеет место для MIMO восходящей линии связи, так как разные потоки данных полезной нагрузки передаются в разные компоненты SUDAC.
- На стороне UE требуется меньше функциональных возможностей обработки.
- Пользовательское оборудование может постоянно использовать свои усилители мощности, чтобы передавать поля пилот-сигналов маякового сигнала.
- Совместно используемая восходящая линия связи может быть более легкой посредством использования дополнительного выравнивания маяковых сигналов от разных пользовательских оборудований, например, посредством TDMA или FDMA, так что SUDAC может оценивать разные каналы интерфейсной стороны (от пользовательского оборудования в SUDAC) и компенсирует их для разных поддиапазонов индивидуально.
КОММЕНТАРИИ О ДОПОЛНИТЕЛЬНЫХ ВАРИАНТАХ ОСУЩЕСТВЛЕНИЯ
Согласно одному варианту осуществления, передача MIMO рассматривается для восходящей линии связи и нисходящей линии связи для нескольких пользовательских оборудований (без соединения с базовой станции), компонентов SUDAC и базовой станции. Способы, описанные выше, могут напрямую применяться к этому сценарию, хотя здесь предлагается, что каждое пользовательское оборудование управляет своими обслуживающими компонентами SUDAC в отношении назначения ресурсов, выравнивания помех, и т.д. Тем не менее, SUDAC может осуществлять сигнализацию в пользовательское оборудование посредством канала конфигурации и управления (= маякового сигнала), когда наблюдаются ослабления вследствие помех. Поэтому, может применяться устойчивая синхронизация вследствие потенциальных помех, которая обеспечивает возможность назначения ресурсов, которое изменяется во времени. Новые компоненты SUDAC могут присоединяться и другие могут покидать активную SUDAS. Поэтому, является предпочтительным непрерывное обновление назначения ресурсов и возможность взаимодействия с другими системами (помехи), например, частично во время обнаружения и частично во время работы посредством назначения ресурсов.
Один дополнительный вариант осуществления описывает пользовательские оборудования, имеющие соединение с базовой станцией в противоположность предыдущему. В этом случае, упомянутая временная синхронизация, как описано ранее, имеет дополнительную значимость. Отметим, что пользовательское оборудование может сигнализировать в базовую станцию степень возможного пространственного мультиплексирования в зависимости от фактического количества принадлежащих пользовательскому оборудованию антенн и используемых компонентов SUDAC. Тогда, базовая станция может принимать компромиссное решение между усилением формирования диаграммы направленности и усилением пространственного мультиплексирования, то есть, используются ли антенны базовой станции больше для формирования диаграммы направленности или для передачи большего количества пространственных потоков данных.
Если пользовательское оборудование обладает антенной решеткой (то есть, более, чем одной антенной), чистое использование для формирования диаграммы направленности/управления лучом будет использовать только один экземпляр канальной оценки+корректировки/предварительного кодирования в расчете на линию связи 60G. Однако (частично) применение антенной решетки для подавления помех будет использовать несколько экземпляров канальной оценки и объединенной корректировки/предварительного кодирования. Это из-за того, что создающие помехи сигналы отделяются согласно разным канальным характеристикам, которые оцениваются посредством канальной оценки.
Когда применяются поляризованные антенны (может быть в комбинации с формированием диаграммы направленности), экземпляр канальной оценки применяется в расчете на поляризацию. Если имеется объединенное формирование диаграммы направленности или никакого формирования диаграммы направленности для разных поляризаций, объединенная канальная оценка по сигналам от/для разных поляризаций является предпочтительной.
Если применяется CDMA, маяковый сигнал также будет расширяться посредством расширения спектра с применением прямой последовательности. Может быть полезным осуществлять объединенное расширение маяков+сигнала полезной нагрузки от/для ретрансляции. После устранения расширения, должны быть применимыми описанные алгоритмы для канальных оценок.
Применение разных временных слотов вместо разных поддиапазонов для CF/DF в частотной области 60G является аналогичным, когда имеется только несколько более большая гибкость для канальной оценки при оценке разных каналов от/в разные компоненты SUDAC в соответствующих временных слотах.
Извлечение амплитуды и фазы или канальная оценка из опорных данных является в общем хорошо известным для сигнала в диапазоне s6G также как способы интерполяции/экстраполяции. Эти способы являются расширенными средствами для достижения цели передачи данных 60G. Поэтому, показана канальная оценка и интерполяция по времени и частоте для/над спектром ретранслируемого сигнала на основе маяковых сигналов, где ретранслируемый сигнал одиночно не обеспечивает достаточное средство для достижения этой точности канальной оценки и разрешения. Описанная канальная оценка может поддерживать разные плотности полей пилот-сигналов также как разные количества маяковых сигналов, разные структуры маякового сигнала (например, нормальные маяковые сигналы и маяковые сигналы суперпозиции), или разные местоположения в сетке ресурсов t-f-c-s. Дополнительно, канальная оценка может адаптироваться к изменению положений и структуры маяковых сигналов (например, в случае маяковых сигналов суперпозиции). Дополнительно, алгоритмы оценки могут адаптировать их способ обработки полей пилот-сигналов согласно, например, фактическому SNR или фактической скорости доплеровского изменения интерфейсной стороны или другим компромиссным соотношениям. Например, имеется компромиссное соотношение между длиной поля пилот-сигнала или используемой длиной сегмента полей пилот-сигналов и SNR (), откуда потери (вследствие дополнительных помех) могут вычисляться из ошибки канальной оценки и фазового шума без возможности компенсации. Это показано на фиг. 28, которая показывает сетку 350 3D, показывающую потери в дБ в зависимости от длины поля пилот-сигнала и SNR (). Согласно фиг. 28, имеются всегда минимальные потери для заданной длины поля пилот-сигнала или используемой длины сегмента поля пилот-сигнала и SNR.
Дополнительные варианты осуществления показывают приемопередатчик (5), где каскад (15) приема и/или модуль (20, 22) канальной оценки интерфейсной стороны и/или серверной стороны сконфигурирован с возможностью адаптировать параметры приема в соответствии с фактической канальной характеристикой, такой как фактическое SNR и/или фактическая скорость доплеровского изменения.
Другой вариант осуществления показывает приемопередатчик (5), содержащий анализатор частот, чтобы использовать резонансную частоту окружающего материала, который является временным эталоном для приемопередатчика (5).
Дополнительно, пользовательское оборудование (10) может содержать, по меньшей мере, один приемопередатчик (5).
Согласно дополнительным вариантам осуществления, SUDAC (30) содержит модуль (91) канальной оценки интерфейсной стороны, при этом модуль (91) канальной оценки интерфейсной стороны сконфигурирован с возможностью выполнять канальную оценку на основе сигнала (45) оценки интерфейсной стороны, чтобы вычислять коэффициенты канальной оценки, при этом приемопередатчик (90) интерфейсной стороны сконфигурирован с возможностью передавать коэффициенты канальной оценки в пользовательское оборудование.
Другие варианты осуществления показывают SUDAC (30), при этом компенсация частотного смещения интерфейсной стороны и/или серверной стороны выполняет регулировку цепи фазовой синхронизации, чтобы управлять частотным преобразованием из крайне высокой частоты в ультравысокую частоту и/или промежуточные частоты.
Один дополнительный вариант осуществления показывает SUDAC (30), при этом приемопередатчик (85, 90) серверной стороны и/или интерфейсной стороны сконфигурирован с возможностью адаптировать свою полосу пропускания приема к полосе пропускания фактического входящего сигнала.
Хотя некоторые аспекты были описаны в контексте устройства, должно быть ясным, что эти аспекты также представляют описание соответствующего способа, где блок или устройство соответствует этапу способа или признаку этапа способа. Аналогично, аспекты, описанные в контексте этапа способа, также представляют описание соответствующего блока или элемента или признака соответствующего устройства. Некоторые или все из этапов способа могут исполняться посредством (или с использованием) аппаратного устройства, такого как, например, микропроцессор, программируемый компьютер или электронная схема. В некоторых вариантах осуществления, некоторый один или более из наиболее важных этапов способа могут исполняться посредством такого устройства.
В зависимости от некоторых требований к осуществлению, варианты осуществления изобретения могут осуществляться в аппаратном обеспечении или в программном обеспечении. Вариант осуществления может выполняться с использованием цифрового запоминающего носителя, например, гибкого диска, DVD, Blu-Ray, CD, ROM, PROM, EPROM, EEPROM или флэш-памяти, имеющего электронно-читаемые сигналы управления, сохраненные на нем, которые взаимодействуют (или являются способными взаимодействовать) с программируемой компьютерной системой таким образом, что выполняется соответствующий способ. Поэтому, цифровой запоминающий носитель может быть считываемым посредством компьютера.
Некоторые варианты осуществления согласно изобретению содержат носитель данных, имеющий электронно-читаемые сигналы управления, которые являются способными взаимодействовать с программируемой компьютерной системой, так что выполняется один из способов, здесь описанных.
В общем, варианты осуществления настоящего изобретения могут осуществляться как компьютерный программный продукт с программным кодом, при этом программный код выполнен с возможностью для выполнения одного из способов, когда компьютерный программный продукт исполняется на компьютере. Программный код может, например, храниться на машиночитаемом носителе.
Другие варианты осуществления содержат компьютерную программу для выполнения одного из способов, здесь описанных, сохраненную на машиночитаемом носителе.
Другими словами, один вариант осуществления нового способа является, поэтому, компьютерной программой, имеющей программный код для выполнения одного из способов, здесь описанных, когда компьютерная программа исполняется на компьютере.
Один дополнительный вариант осуществления новых способов является, поэтому, носителем данных (или цифровым запоминающим носителем, или считываемым компьютером носителем), содержащим, записанную на нем, компьютерную программу для выполнения одного из способов, здесь описанных. Носитель данных, цифровой запоминающий носитель или записывающий носитель обычно являются материальными и/или нетранзиторными.
Один дополнительный вариант осуществления нового способа является, поэтому, потоком данных или последовательностью сигналов, представляющей компьютерную программу для выполнения одного из способов, здесь описанных. Поток данных или последовательность сигналов может, например, быть сконфигурирована с возможностью передаваться посредством соединения передачи данных, например, посредством сети Интернет.
Один дополнительный вариант осуществления содержит средство обработки, например, компьютер, или программируемое логическое устройство, сконфигурированное с возможностью или выполненное с возможностью выполнять один из способов, здесь описанных.
Один дополнительный вариант осуществления содержит компьютер, имеющий установленную на нем компьютерную программу для выполнения одного из способов, здесь описанных.
Один дополнительный вариант осуществления согласно изобретению содержит устройство или систему, сконфигурированное с возможностью передавать (например, электронным образом или оптически) компьютерную программу для выполнения одного из способов, здесь описанных, в приемник. Приемник может, например, быть компьютером, мобильным устройством, запоминающим устройством или подобным. Устройство или система может, например, содержать файловый сервер для передачи компьютерной программы в приемник.
В некоторых вариантах осуществления, может использоваться программируемое логическое устройство (например, программируемая пользователем вентильная матрица), чтобы выполнять некоторые или все из функциональных возможностей способов, здесь описанных. В некоторых вариантах осуществления, программируемая пользователем вентильная матрица может работать вместе с микропроцессором, чтобы выполнять один из способов, здесь описанных. В общем, способы предпочтительно выполняются посредством любого аппаратного устройства.
Вышеописанные варианты осуществления являются всего лишь иллюстративными для принципов настоящего изобретения. Следует понимать, что модификации и изменения компоновок и подробностей, здесь описанных, должны быть ясны специалистам в данной области техники. Предполагается, поэтому, что ограничение объема охраны обеспечивается только посредством объема приложенной формулы изобретения, а не посредством конкретных подробностей, представленных здесь посредством описания и объяснения вариантов осуществления.
СВЯЗАННЫЕ ДОКУМЕНТЫ
[1] Параллельная патентная заявка
[2] T.S. Rappaport, и др., "State of the Art in 60-GHz Integrated Circuits and Systems for Wireless Communications", Proceedings of the IEEE (Volume 99, Issue 8, pp. 1390-1436), Aug. 2011.
[3] Mengali, D'Andrea, "Synchronization Techniques for Digital Receivers", Plenum Press, New York, USA, 1997.
[4] J.G. Proakis, "Digital Communication", 5th Edition, McGraw-Hill Inc., New York, USA, 2008.
[5] T.S. Rappaport, "Wireless Communications: Principles and Practice", 2nd Edition, Prentice Hall, Upper Saddle River, USA 2002.
[6] L. Hanzo, M. Münster, B. J. Choi, and T. Keller, "OFDM and MC-CDMA for Broadband Multi-User Communications, WLANs and Broadcasting", John Wiley & Sons Ltd. - IEEE Press, West Sussex, England, 2003.
[7] Karolina Ratajczak, Krzysztof Bakowski, Krzysztof Wesolowski, "Two-way Relaying for 5G Systems - Comparison of Network Coding and MIMO Techniques", IEEE Wireless Communications and Networks Conference,WCNC 2014.
[8] Jun Ma, Philip Orlik, Jinyun Zhang, and Geoffrey Ye Li, "Pilot Matrix Design for Estimating Cascaded Channels in Two-Hop MIMO Amplify-and-Forward Relay Systems", IEEE Transactions on Wireless Communications, Vol. 10, No. 6, June 2011.
[9] Chirag S. Patel and Gordon L. Stüber, "Channel Estimation for Amplify and Forward Relay Based Cooperation Diversity Systems", IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 6, NO. 6, JUNE 2007.
[10] Feifei Gao, Tao Cui, and Arumugam Nallanathan, "On Channel Estimation and Optimal Training Design for Amplify and Forward Relay Networks", IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 7, NO. 5, MAY 2008.
[11] Патент WO08069555A1 (Патентное семейство 41912590), "APPARATUS AND METHOD FOR CHANNEL ESTIMATION AND SYNCHRONIZATION IN OFDM/OFDMA RELAY SYSTEM", дата приоритета 5.12.2006
[12] Патент CN102833193A, "COMPRESSED SENSING BASED SPARSE CHANNEL ESTIMATION METHOD IN TWO-WAY RELAY NETWORK", дата приоритета 20.08.2012
[13] Патент CN102281129A, "MIMO two-way relay system information processing method (Machine translation)", дата приоритета 12.08.2011
[14] Патент CN102546127A, "Information processing method for multiple-input multiple-output (MIMO) relay system", дата приоритета 6.01.2012.


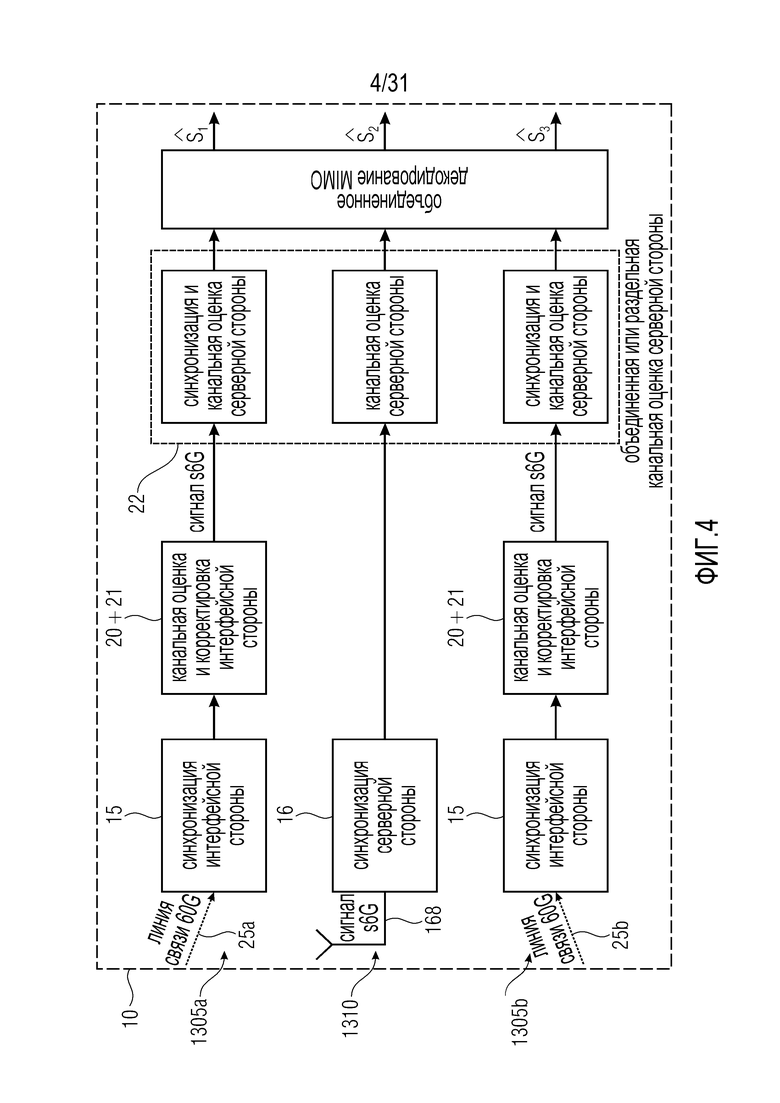

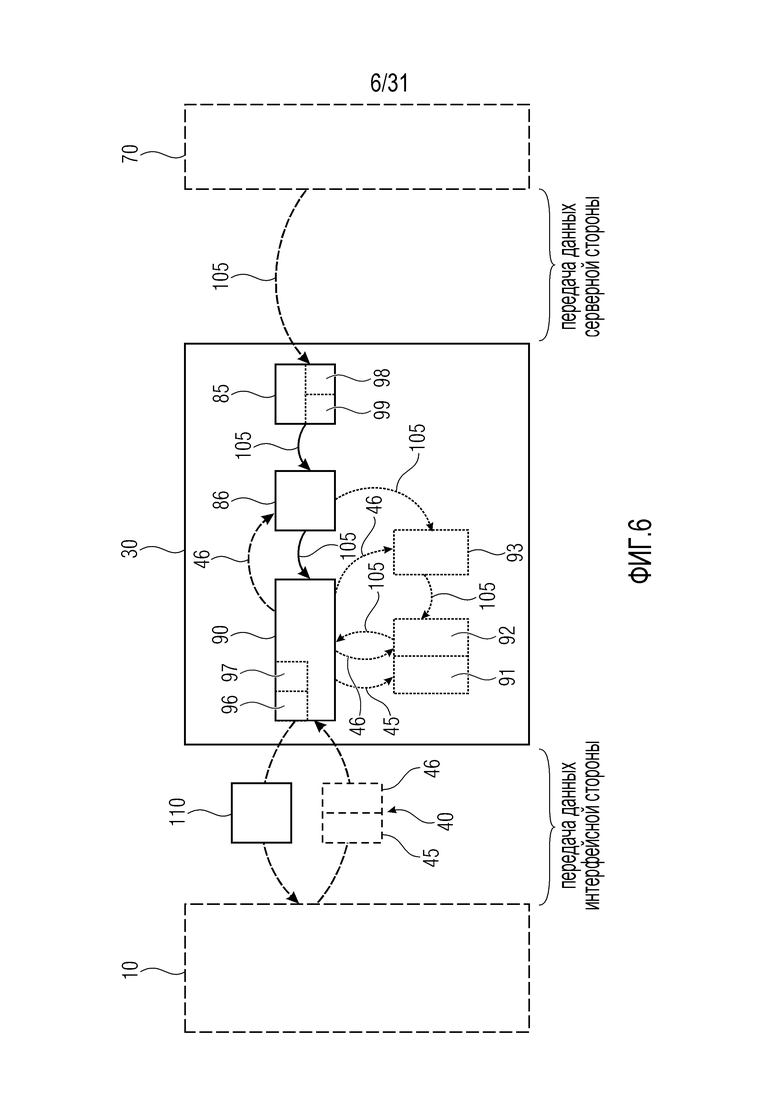







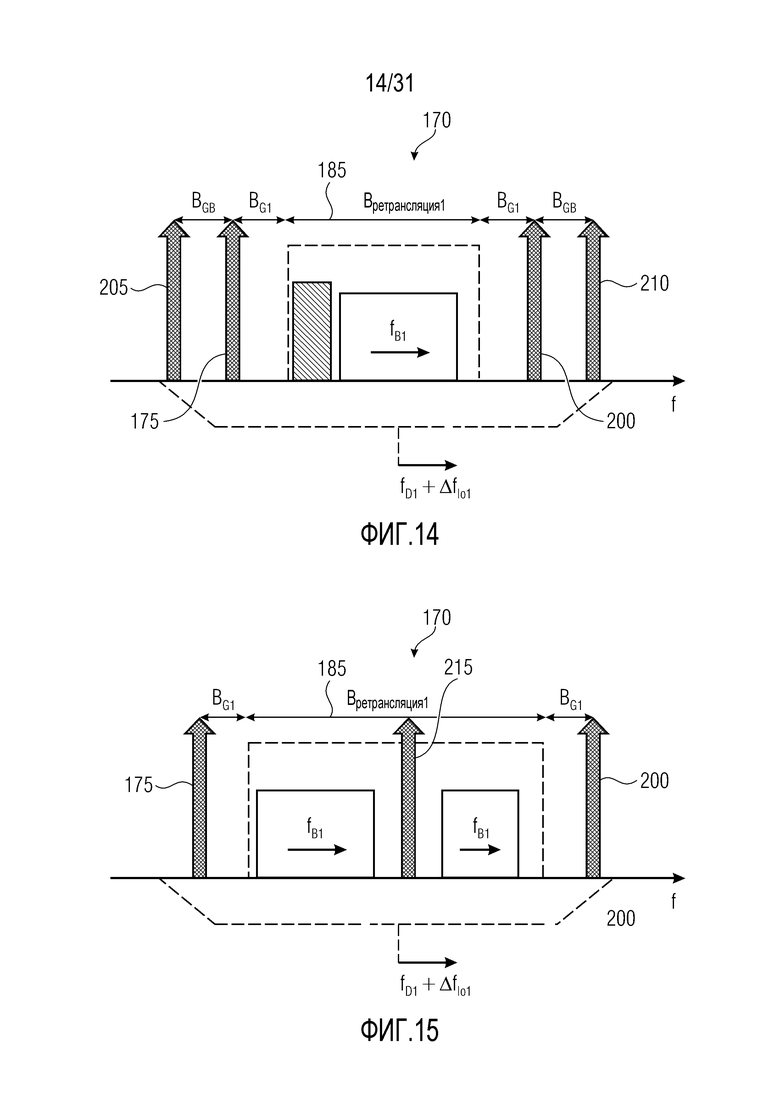

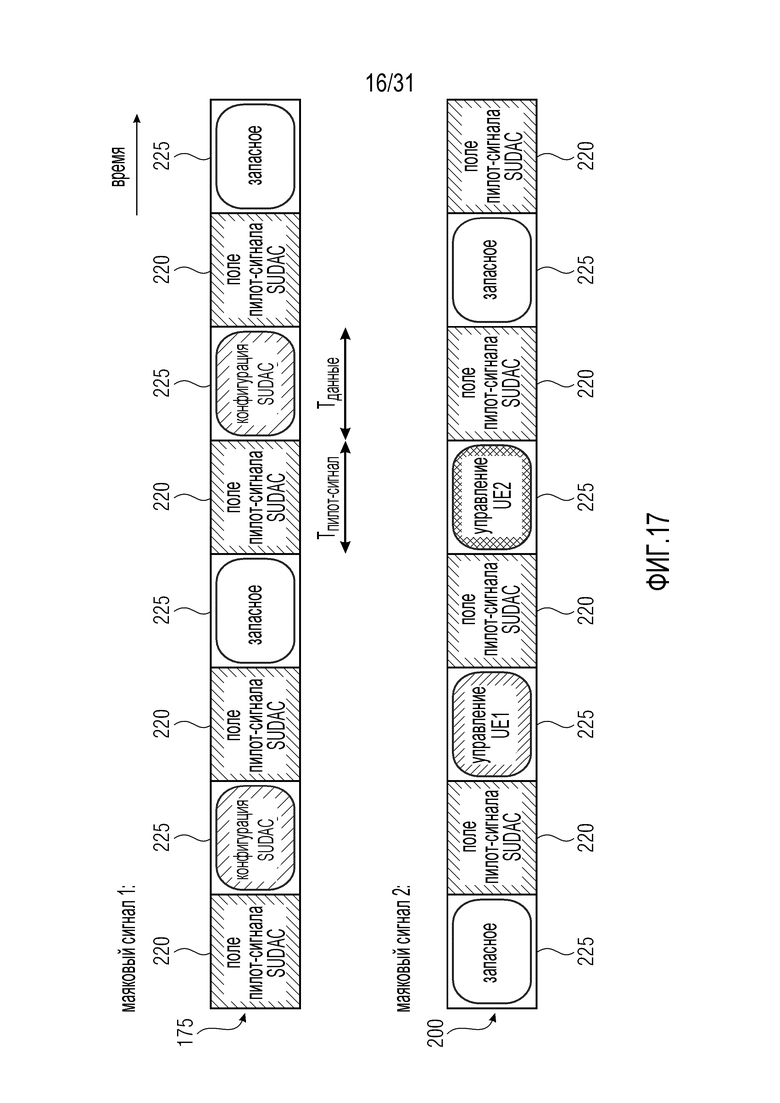

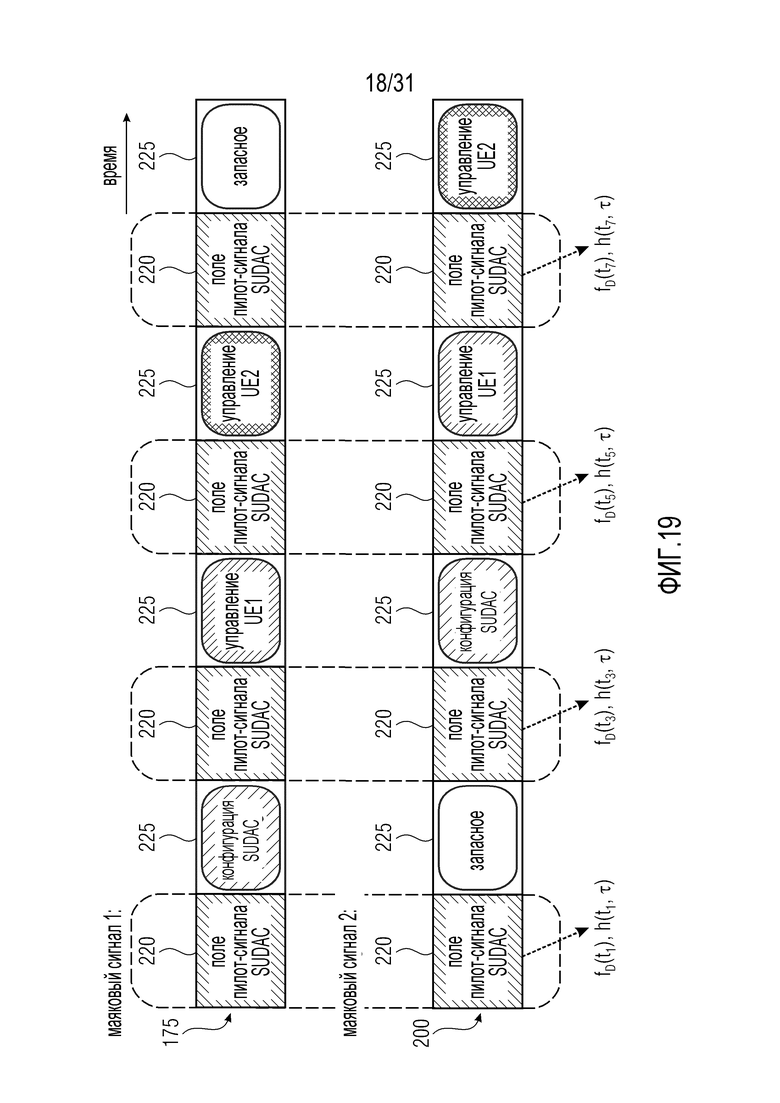


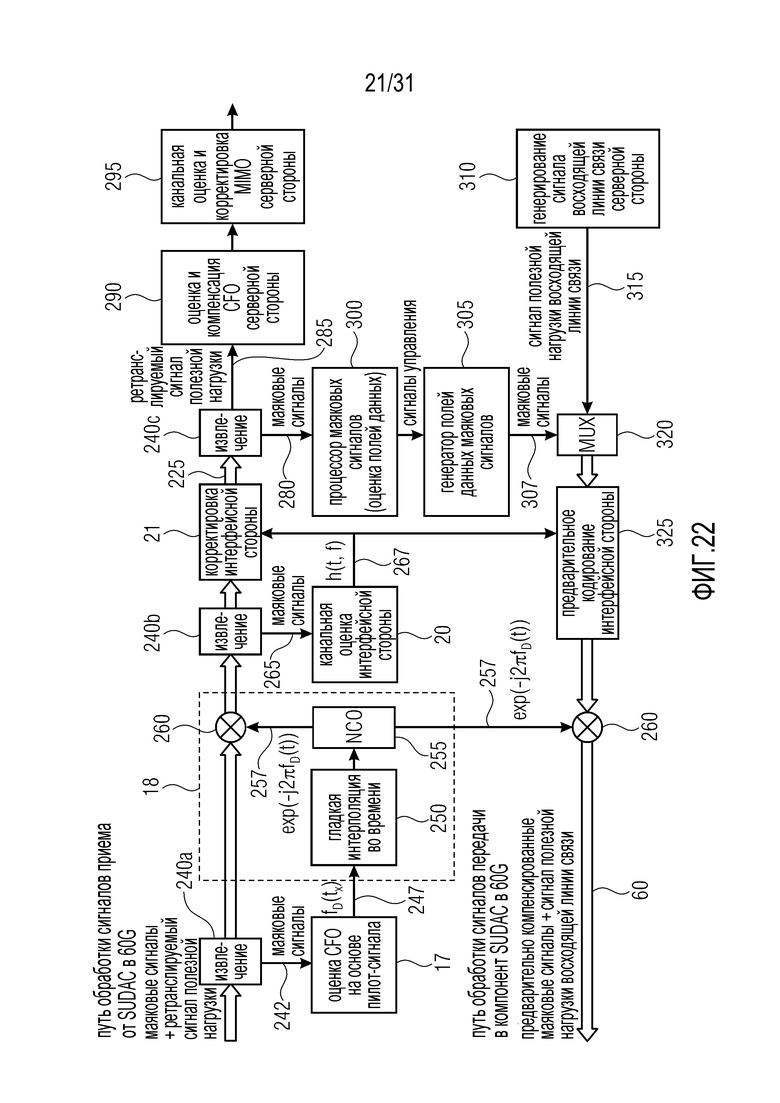


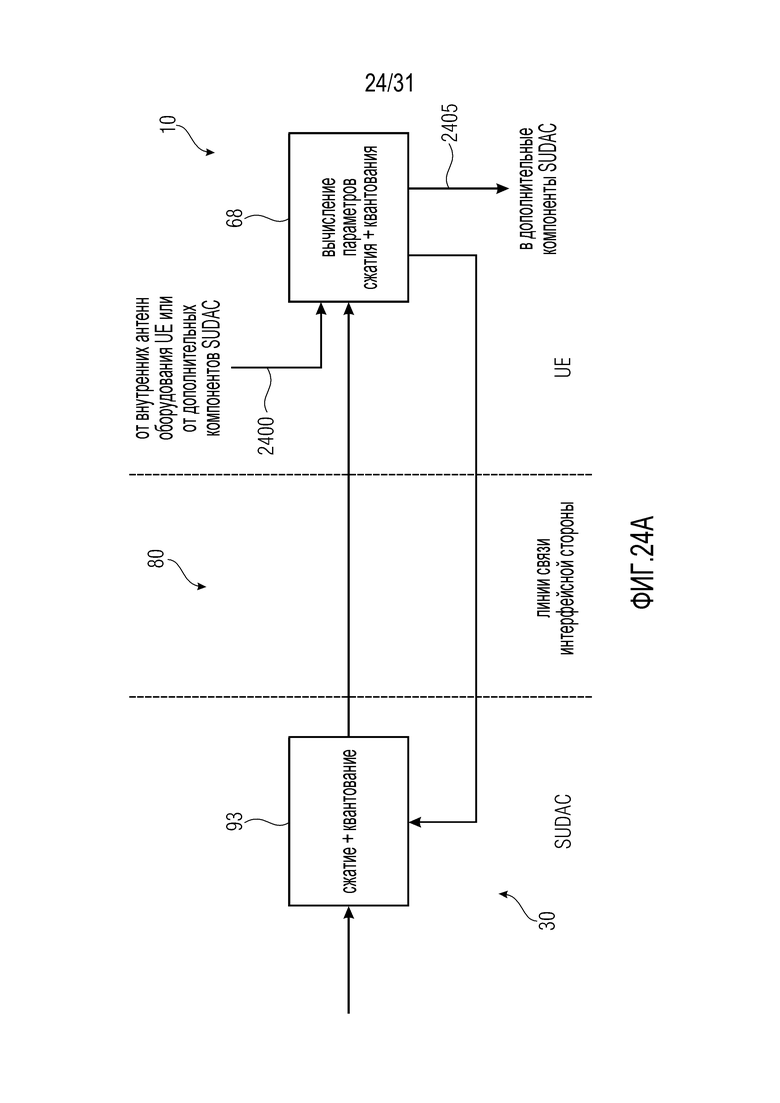






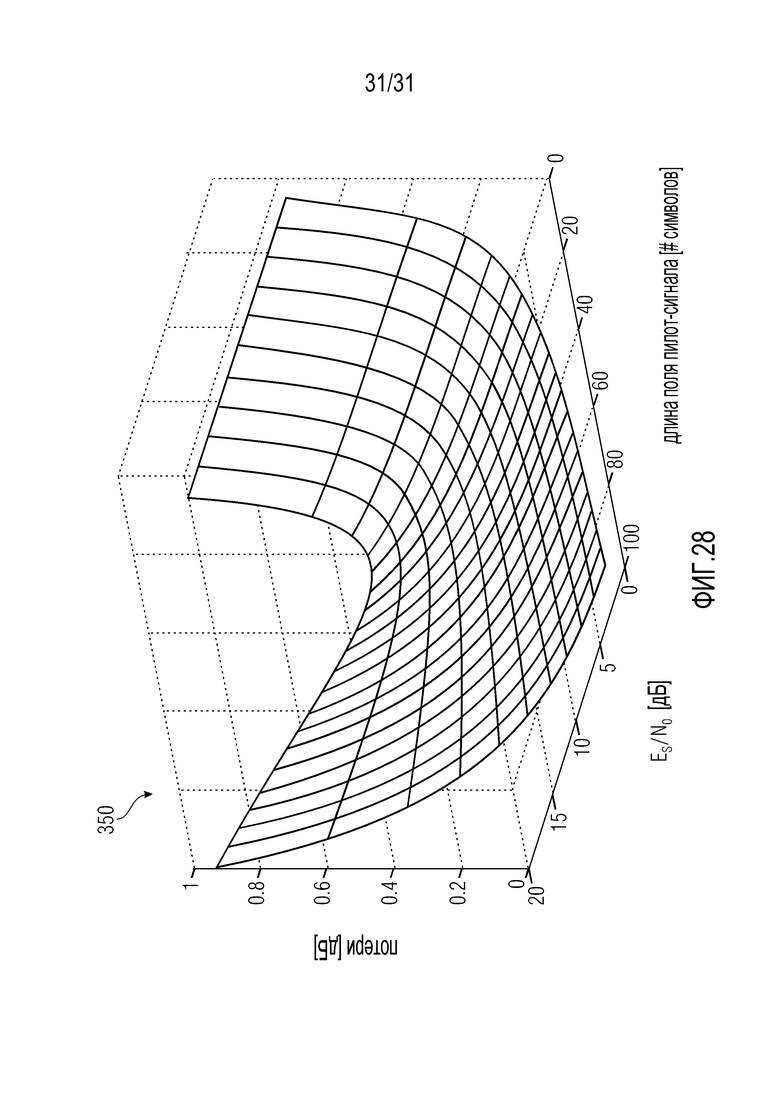
Изобретение относится к приемопередатчику пользовательского оборудования и совместно используемому распределенному антенному компоненту стороны пользовательского оборудования (SUDAC). Технический результат заключается в возможности уменьшения искажений передачи данных. Приемопередатчик пользовательского оборудования содержит: каскад приема; модуль канальной оценки интерфейсной стороны; модуль канальной корректировки интерфейсной стороны; модуль канальной оценки серверной стороны и модуль канальной корректировки серверной стороны. Каскад приема сконфигурирован с возможностью принимать входящий сигнал от SUDAC, при этом SUDAC обеспечивает возможность ретрансляционной передачи данных, содержащей передачу данных интерфейсной стороны с использованием крайне высоких частот и передачу данных серверной стороны с использованием ультравысоких частот, при этом входящий сигнал содержит часть данных, часть управления серверной стороны и часть управления интерфейсной стороны, при этом часть управления интерфейсной стороны содержит сигнал оценки интерфейсной стороны и сигнал конфигурации. Модуль канальной оценки интерфейсной стороны сконфигурирован с возможностью выполнять канальную оценку на основе сигнала оценки интерфейсной стороны. Модуль канальной корректировки интерфейсной стороны сконфигурирован с возможностью корректировать искажения, вызываемые посредством использования крайне высоких частот, на основе канальной оценки модуля канальной оценки интерфейсной стороны. Модуль канальной оценки серверной стороны сконфигурирован с возможностью выполнять канальную оценку на основе части управления серверной стороны. Модуль канальной корректировки серверной стороны сконфигурирован с возможностью корректировать искажения, вызываемые посредством использования ультравысоких частот, на основе канальной оценки модуля канальной оценки серверной стороны. 8 н. и 22 з.п. ф-лы, 36 ил.
1. Совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования, содержащий:
приемопередатчик (85) серверной стороны,
приемопередатчик (90) интерфейсной стороны, и
генератор (95) сигналов оценки;
при этом приемопередатчик (85) серверной стороны сконфигурирован с возможностью принимать входящий сигнал (105) от, по меньшей мере, одной базовой станции (70) с использованием ультравысоких частот и выводить входящий сигнал на промежуточных частотах;
при этом генератор (95) сигналов оценки сконфигурирован с возможностью создавать часть (40) управления интерфейсной стороны, содержащую сигнал (45) оценки интерфейсной стороны;
при этом приемопередатчик (90) интерфейсной стороны сконфигурирован с возможностью генерировать исходящий сигнал (110) с использованием крайне высоких частот, содержащий входящий сигнал (105), использующий ретрансляционную полосу (185) пропускания, и дополнительно содержащий часть управления интерфейсной стороны, расположенную ниже, и другую часть управления интерфейсной стороны, расположенную выше ретрансляционной полосы пропускания, и передавать исходящий сигнал (110), содержащий части управления интерфейсной стороны, в пользовательское оборудование (10).
2. Приемопередатчик (5) пользовательского оборудования (10), при этом приемопередатчик содержит:
каскад (15) приема;
модуль (20) канальной оценки интерфейсной стороны;
модуль (21) канальной корректировки интерфейсной стороны;
модуль (22) канальной оценки серверной стороны; и
модуль (23) канальной корректировки серверной стороны;
при этом каскад (15) приема сконфигурирован с возможностью принимать входящий сигнал (25) от совместно используемого распределенного антенного компонента (30) стороны пользовательского оборудования, при этом совместно используемый распределенный антенный компонент стороны пользовательского оборудования обеспечивает возможность ретрансляционной передачи данных, содержащей передачу данных интерфейсной стороны с использованием крайне высоких частот и передачу данных серверной стороны с использованием ультравысоких частот, при этом входящий сигнал (25) содержит часть (35) данных, часть (50) управления серверной стороны и часть (40) управления интерфейсной стороны, при этом часть управления интерфейсной стороны содержит сигнал (45) оценки интерфейсной стороны и сигнал (46) конфигурации;
при этом модуль (20) канальной оценки интерфейсной стороны сконфигурирован с возможностью выполнять канальную оценку на основе сигнала (45) оценки интерфейсной стороны;
при этом модуль (21) канальной корректировки интерфейсной стороны сконфигурирован с возможностью корректировать искажения, вызываемые посредством использования крайне высоких частот, на основе канальной оценки модуля (20) канальной оценки интерфейсной стороны;
при этом модуль (22) канальной оценки серверной стороны сконфигурирован с возможностью выполнять канальную оценку на основе части (50) управления серверной стороны; и
при этом модуль (23) канальной корректировки серверной стороны сконфигурирован с возможностью корректировать искажения, вызываемые посредством использования ультравысоких частот, на основе канальной оценки модуля (22) канальной оценки серверной стороны.
3. Приемопередатчик (5) по п. 2, содержащий:
множество каскадов (15) приема,
общий модуль (22) канальной оценки серверной стороны для множества каскадов (15) приема; и
общий модуль (23) канальной корректировки серверной стороны для множества каскадов (15) приема;
при этом общий модуль (22) канальной оценки серверной стороны сконфигурирован с возможностью выполнять комбинированную канальную оценку на основе множества частей (50) управления серверной стороны; и
при этом общий модуль (23) канальной корректировки серверной стороны сконфигурирован с возможностью выполнять комбинированную канальную корректировку на основе результатов комбинированной канальной оценки.
4. Приемопередатчик (5) по п. 3, содержащий каскад (16) прямого приема, сконфигурированный с возможностью напрямую принимать сигнал от базовой станции (70);
при этом общий модуль (22) канальной оценки серверной стороны сконфигурирован с возможностью выполнять комбинированную канальную оценку на основе множества частей (50) управления серверной стороны и сигнала, принятого напрямую от базовой станции.
5. Приемопередатчик (5) по п. 2,
в котором приемопередатчик (5) содержит модуль (17) оценки частоты интерфейсной стороны, сконфигурированный с возможностью выполнять оценку частоты интерфейсной стороны на основе части (40) управления интерфейсной стороны, и модуль (18) компенсации частоты интерфейсной стороны, сконфигурированный с возможностью выполнять компенсацию частотного смещения интерфейсной стороны на основе оценки; и/или
в котором приемопередатчик (5) содержит модуль (19) оценки частоты серверной стороны, сконфигурированный с возможностью выполнять оценку частоты серверной стороны на основе части (50) управления серверной стороны, и модуль (24) компенсации частоты серверной стороны, сконфигурированный с возможностью выполнять компенсацию частотного смещения серверной стороны на основе оценки.
6. Приемопередатчик (5) по п. 2, содержащий:
каскад (55) передачи; и
модуль (65) предварительной канальной оценки интерфейсной стороны;
при этом модуль (65) предварительной канальной оценки интерфейсной стороны сконфигурирован с возможностью вычислять канальные коэффициенты интерфейсной стороны, чтобы выполнять предварительную канальную оценку на основе сигнала (45) оценки интерфейсной стороны, чтобы предварительно компенсировать искажения, которые будут вызываться посредством использования крайне высоких частот.
7. Приемопередатчик (5) по п. 6, содержащий:
модуль (66) предварительной канальной оценки серверной стороны;
при этом модуль (66) предварительной канальной оценки серверной стороны сконфигурирован с возможностью вычислять канальные коэффициенты серверной стороны, чтобы выполнять канальную оценку на основе части (50) управления серверной стороны, чтобы уменьшать искажения, которые будут вызываться посредством использования ультравысоких частот.
8. Приемопередатчик (5) по п. 6, в котором каскад (55) передачи сконфигурирован с возможностью передавать канальные характеристики интерфейсной стороны и/или серверной стороны, и/или относящиеся к каналу интерфейсной стороны и/или серверной стороны параметры, и/или относящиеся к обработке сигналов интерфейсной стороны и/или серверной стороны параметры в совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования, чтобы удаленным образом управлять обработкой сигналов в совместно используемом распределенном антенном компоненте (30) стороны пользовательского оборудования.
9. Приемопередатчик (5) по п. 2, содержащий сигнальный процессор (68);
при этом сигнальный процессор (68) сконфигурирован с возможностью вычислять параметры обработки сигналов, чтобы передавать параметры обработки сигналов в совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования.
10. Приемопередатчик (5) по п. 2,
в котором часть (35) данных и часть (40) управления интерфейсной стороны сигнала крайне высокой частоты, подлежащие передаче, отличаются друг от друга в отношении несущей частоты, структуры кода и/или временного слота; и/или
в котором часть (35) данных и часть (50) управления серверной стороны сигнала ультравысокой частоты, подлежащие передаче, отличаются друг от друга в отношении несущей частоты, структуры кода и/или временного слота.
11. Приемопередатчик (5) по п. 2, в котором входящий сигнал (25) содержит дополнительную часть (42, 200) управления интерфейсной стороны, имеющую другую несущую частоту по сравнению с частью (40, 175) управления интерфейсной стороны и/или являющуюся сдвинутой во времени по сравнению с частью (40) управления интерфейсной стороны.
12. Приемопередатчик (5) по п. 2, в котором часть (40, 175) управления интерфейсной стороны и дополнительная часть (42, 200) управления интерфейсной стороны выровнены во времени и имеют разные несущие частоты, чтобы улучшать устойчивость или точность интерполяции между дополнительными, последующими сигналами (45, 220) оценки интерфейсной стороны вследствие объединенной обработки части (40, 175) управления интерфейсной стороны и дополнительной части (42, 200) управления интерфейсной стороны.
13. Совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования, содержащий:
приемопередатчик (85) серверной стороны;
модуль (86) канальной корректировки серверной стороны; и
приемопередатчик (90) интерфейсной стороны;
при этом приемопередатчик (85) серверной стороны сконфигурирован с возможностью принимать входящий сигнал (105) от базовой станции (70) с использованием ультравысоких частот;
при этом приемопередатчик (85) серверной стороны сконфигурирован с возможностью выводить входящий сигнал (105) на промежуточных частотах;
при этом модуль (86) канальной корректировки серверной стороны сконфигурирован с возможностью уменьшать во входящем сигнале искажения, вызываемые посредством использования ультравысоких частот, с использованием сигнала (46) конфигурации, принятого от модуля (22) канальной оценки серверной стороны пользовательского оборудования (10) посредством приемопередатчика (90) интерфейсной стороны;
при этом приемопередатчик (90) интерфейсной стороны сконфигурирован с возможностью выводить входящий сигнал с использованием крайне высоких частот, чтобы генерировать исходящий сигнал (110) и передавать исходящий сигнал (110) в пользовательское оборудование (10); или
при этом приемопередатчик (90) интерфейсной стороны сконфигурирован с возможностью принимать сигнал (46) конфигурации от пользовательского оборудования (10) и пересылать сигнал конфигурации в модуль (86) канальной корректировки серверной стороны.
14. Совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования по п. 13, в котором совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования содержит:
модуль (91) канальной оценки интерфейсной стороны;
модуль (92) предварительной канальной корректировки интерфейсной стороны;
при этом модуль (91) канальной оценки интерфейсной стороны сконфигурирован с возможностью выполнять канальную оценку на основе сигнала (45) оценки интерфейсной стороны;
при этом модуль (92) предварительной канальной корректировки интерфейсной стороны сконфигурирован с возможностью предварительно корректировать входящий сигнал (105), чтобы уменьшать искажения, которые будут вызываться посредством использования крайне высоких частот во время передачи исходящего сигнала (110), на основе канальной оценки модуля (91) канальной оценки интерфейсной стороны.
15. Совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования по п. 13, в котором совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования содержит:
модуль (92) предварительной канальной корректировки интерфейсной стороны;
при этом модуль (92) предварительной канальной корректировки интерфейсной стороны сконфигурирован с возможностью предварительно корректировать входящий сигнал (105), чтобы уменьшать искажения, которые будут вызываться посредством использования крайне высоких частот во время передачи исходящего сигнала (110), на основе сигнала (46) конфигурации, принятого от модуля (20) канальной оценки интерфейсной стороны пользовательского оборудования (10).
16. Совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования по п. 13, в котором совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования содержит кодер (93), сконфигурированный с возможностью кодировать и/или сжимать входящий сигнал (105) с использованием параметров обработки сигналов и/или параметров сжатия, принятых от пользовательского оборудования (10); и/или
в котором совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования содержит декодер (94), сконфигурированный с возможностью декодировать и/или распаковывать исходящий сигнал с использованием параметров декодирования и/или параметров распаковки, принятых от пользовательского оборудования (10).
17. Совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования по п. 13,
в котором приемопередатчик (90) интерфейсной стороны содержит модуль (96) оценки частоты интерфейсной стороны, сконфигурированный с возможностью выполнять оценку частоты интерфейсной стороны на основе части управления интерфейсной стороны (40), и модуль (97) компенсации частоты интерфейсной стороны, сконфигурированный с возможностью выполнять компенсацию частотного смещения интерфейсной стороны на основе оценки; и/или
в котором приемопередатчик (85) серверной стороны содержит модуль (98) оценки частоты серверной стороны, сконфигурированный с возможностью выполнять оценку частоты серверной стороны на основе части (50) управления серверной стороны, и модуль (99) компенсации частоты серверной стороны, сконфигурированный с возможностью выполнять компенсацию частотного смещения серверной стороны на основе оценки.
18. Совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования по п. 17, в котором совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования содержит управляемый напряжением осциллятор для получения компенсации частотного смещения интерфейсной стороны и/или серверной стороны, при этом дополнительная часть (42) управления интерфейсной стороны является непрерывным волновым сигналом, используемым управляемым напряжением осциллятором, чтобы выполнять обратную частотную модуляцию.
19. Совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования по п. 1 или 13, в котором приемопередатчик (90) интерфейсной стороны сконфигурирован с возможностью принимать входящий сигнал (150) от пользовательского оборудования (10) с использованием крайне высоких частот;
при этом приемопередатчик (85) серверной стороны сконфигурирован с возможностью передавать исходящий сигнал (165) в базовую станцию (70) с использованием ультравысоких частот.
20. Совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования по п. 19, содержащий модуль (91) канальной оценки интерфейсной стороны и модуль (92a) канальной корректировки интерфейсной стороны;
при этом модуль (91) канальной оценки интерфейсной стороны сконфигурирован с возможностью выполнять канальную оценку на основе сигнала (45) оценки интерфейсной стороны;
при этом модуль (92a) канальной корректировки интерфейсной стороны сконфигурирован с возможностью корректировать искажения, вызываемые посредством использования крайне высоких частот, на основе канальной оценки модуля (91) канальной оценки интерфейсной стороны.
21. Совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования по п. 13, в котором передача данных интерфейсной стороны использует способ дуплексирования с частотным разделением и в котором передача данных серверной стороны использует способ дуплексирования с временным разделением.
22. Система связи (700), содержащая:
приемопередатчик (5) по п. 2; и
совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования по п. 1 или 13;
при этом совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования и приемопередатчик (5) устанавливают линию связи передачи данных с использованием каскадов (15, 55) приема и передачи приемопередатчика (5) и приемопередатчика (90) интерфейсной стороны совместно используемого распределенного антенного компонента (30) стороны пользовательского оборудования; и
при этом совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования и/или приемопередатчик (5) сконфигурированы с возможностью выполнять временную синхронизацию на основе внешнего, общего временного эталона или на основе сигнала, отправленного приемопередатчиком (5), содержащего текущий временной эталон.
23. Система (700) по п. 22, в которой система содержит базовую станцию (70).
24. Система (700) по п. 22, в которой приемопередатчик (5) и/или совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования используют часть (50) управления серверной стороны базовой станции в качестве общего временного эталона.
25. Система (700) по п. 22,
в которой пользовательское оборудование извлекает временной эталон из части (50) управления серверной стороны;
в которой пользовательское оборудование передает временной эталон в совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования, чтобы получать общий временной эталон.
26. Система (700) по п. 22,
в которой совместно используемый распределенный антенный компонент (30) стороны пользовательского оборудования сконфигурирован для одновременной ретрансляции двух или более линий связи передачи данных, обслуживающих один или более каскадов (15, 55) приема и передачи приемопередатчика (5) одного или более пользовательских оборудований (10).
27. Способ (800) для обработки сигналов в приемопередатчике (5), содержащий этапы:
приема входящего сигнала (25) от совместно используемого распределенного антенного компонента (30) стороны пользовательского оборудования с помощью каскада (15) приема, при этом совместно используемый распределенный антенный компонент стороны пользовательского оборудования обеспечивает возможность ретрансляционной передачи данных, содержащей передачу данных интерфейсной стороны с использованием крайне высоких частот и передачу данных серверной стороны с использованием ультравысоких частот, при этом входящий сигнал (25) содержит часть (35) данных, часть (50) управления серверной стороны и часть (40) управления интерфейсной стороны, при этом часть управления интерфейсной стороны содержит сигнал (45) оценки интерфейсной стороны и сигнал (46) конфигурации; и
выполнения канальной оценки с помощью модуля (20) канальной оценки интерфейсной стороны на основе сигнала (45) оценки интерфейсной стороны;
корректировки искажений, вызываемых посредством использования крайне высоких частот, с помощью модуля (21) канальной корректировки интерфейсной стороны на основе канальной оценки модуля (20) канальной оценки интерфейсной стороны;
выполнения канальной оценки с помощью модуля (22) канальной оценки серверной стороны на основе части (50) управления; и
корректировки искажений, вызываемых посредством использования ультравысоких частот, с помощью модуля (23) канальной корректировки серверной стороны на основе канальной оценки модуля (22) канальной оценки серверной стороны.
28. Способ (900) для обработки сигналов в совместно используемом распределенном антенном компоненте (30) стороны пользовательского оборудования, содержащий этапы:
приема входящего сигнала (105) от, по меньшей мере, одной базовой станции (70) с помощью приемопередатчика серверной стороны с использованием ультравысоких частот
и вывода входящего сигнала на промежуточных частотах;
создания части (40) управления интерфейсной стороны с помощью генератора (95) сигналов оценки, содержащей сигнал (45) оценки интерфейсной стороны;
генерирования исходящего сигнала (110) с помощью приемопередатчика интерфейсной стороны с использованием крайне высоких частот, содержащего входящий сигнал (105), использующий ретрансляционную полосу пропускания и дополнительно содержащий часть (40) управления интерфейсной стороны, расположенную ниже, и другую часть управления интерфейсной стороны, расположенную выше ретрансляционной полосы пропускания, и для передачи исходящего сигнала (110), содержащего части управления интерфейсной стороны, в пользовательское оборудование (10).
29. Способ (1000) для обработки сигналов в совместно используемом распределенном антенном компоненте стороны пользовательского оборудования, содержащий этапы:
приема входящего сигнала (105) от базовой станции (70) с помощью приемопередатчика (85) серверной стороны с использованием ультравысоких частот;
вывода входящего сигнала (105) на промежуточных частотах с помощью приемопередатчика (85) серверной стороны;
уменьшения искажений во входящем сигнале, вызываемых посредством использования ультравысоких частот, с помощью модуля (86) канальной корректировки серверной стороны, с использованием сигнала (46) конфигурации, принятого от модуля канальной оценки серверной стороны пользовательского оборудования (10); и/или
вывода входящего сигнала с помощью приемопередатчика (90) интерфейсной стороны с использованием крайне высоких частот, чтобы генерировать исходящий сигнал (110) и передавать исходящий сигнал (110) в пользовательское оборудование (10).
30. Считываемый компьютером цифровой запоминающий носитель, имеющий сохраненную на нем компьютерную программу, имеющую программный код для выполнения, когда исполняется на компьютере, способа по п. 27, или 28, или 29.

