Изобретение относится к учебным приборам и предназначено для изучения основ электроники, механики, программирования и алгоритмизации.
Из области техники известен демонстрационный гироскоп, содержащий трехстепенной гироскоп с герметичным гироузлом с тремя гермовводами для подвода питания к статору гиромотора, конструктивно помещенным в наружную раму с двумя полуосями, на которой установлен разъем питания от внешнего источника, три выходных контакта которого соединены с тремя гермовводами гироузла (см. патент на изобретение RU №2462761, кл. G09B 23/06, оп. в 2012 г.). Известное устройство предназначено для демонстрации гироскопических эффектов и включает полый гироскоп типа юлы. Внутри гироскопа находится внутренний источник питания. Однако этот демонстрационный прибор ограничен только одним видом движения - вращением. Он не предназначен для исследования других эффектов, возникающих в механике.
Известно устройство для учебной демонстрации взаимосвязи между внутренним атомно-молекулярным строением вещества и его макроскопическими свойствами, содержащее основание, вертикальную стойку, горизонтальный держатель, на котором закреплено испытуемое тело, с возможностью его нагрева и самопроизвольного охлаждения до комнатной температуры, при этом испытуемое тело выполнено в виде геликоидальной пружины, изготовленной из сплава с эффектом памяти формы, которая закреплена верхним концом на держателе, а к ее нижнему концу прикреплен груз в виде разновеса, при этом между держателем штатива и грузом дополнительно размещена дискостержневая модель кристаллической структуры в плоскости в виде шарнирно соединенных между собой стержней и установленных в шарнирных узлах дисков (см. патент на изобретение RU №2374698, кл. G09B 23/06, оп. в 2009 г.). С помощью такой механической модели можно демонстрировать физико-химические явления.
Известен прибор по механике, содержащий вертикальную стойку с закрепленными на ней направляющими, имеющими наклонный и горизонтальный участки, и кинематически связанными между собой грузом, закрепленным на стойке шкивом и подвижным блоком, упруго связанным с основанием, при этом горизонтальный участок направляющих снабжен упором, датчиками фиксации времени движения и приемным лотком, а груз выполнен с взаимно перпендикулярными каналами с возможностью перемещения шарика под собственным весом до упора с пружиной, расположенной в канале (см. патент на полезную модель RU №164176, кл. G09B 23/06, оп. в 2016 г.). Этот прибор позволяет проводить замеры времени движения вдоль горизонтального участка, вычислять конечную скорость груза и рассчитать деформацию пружины, а использование специальной компьютерной учебной программы с машинными расчетами и графическим изображением - зависимости кинетической энергии механической системы от ряда изучаемых параметров, которые изменяются в зависимости от угла наклона наклонного участка.
Известно устройство для проведения физического эксперимента по столкновению тел, включающее металлический шар на горизонтальной плоскости с возможностью воздействия на пружину и маятниковый металлический шар, а также расположенные на основании устройства измерительные приборы и контроллер (см. CN 206115812, кл. G09B 23/10, оп. в 2016 г.). Это устройство позволяет выполнять количественную демонстрацию численного значения энергетической трансдукции процесса столкновения.
Известен шарик с вибрационным звучанием, содержащий упругий кремниевый корпус, разделенный на несколько секторов давления и снабженный множеством датчиков давления, а зонды датчиков давления соответственно растягиваются из отверстий в секторах давления корпуса, при этом зондирующее устройство вытягивается из отверстия на верхней части корпуса, а отверстие середины зондирования выполнено в виде отверстия для подвеса, причем выходные концы сигналов датчиков давления соединены с входным сигнальным концом голосового плеера (см. CN 202876343, кл. А63Н 5/00, оп. в 2013 г.). Это устройство позволяет улучшить интерактивность между ребенком и игрушкой.
Известно шариковое устройство с магнитной подвеской, которое содержит электромагнит, датчики, схему управления, шарик подвески, магнитный проводник, кронштейн и основание, при этом основание снабжено кронштейном, а верхняя часть кронштейна снабжена электромагнитом, оба края кронштейна снабжены датчиком пространства, а внутренняя верхняя часть шара подвески снабжена магнитным проводником (см. CN 2453607, кл. H02N 15/00, оп. в 2001 г.). Это магнитное подвесное шариковое устройство является высокотехнологичным продуктом и может широко использоваться как рекламное устройство, детская игрушка, учебное пособие для демонстрации.
Известно устройство для демонстрации кругового движения, включающее основание, две вертикальные пластины, электродвигатель, дисплей и программируемый логический контроллер, при этом между двумя вертикальными пластинами образована вращающаяся плоскость, а вращающийся вал двигателя выступает из внутренней стороны нижней поверхности подшипника, датчик натяжения расположен на концевой части вращающегося вала двигателя, шар, соединенный с датчиком натяжения, расположен в баке подшипника; множественные датчики скорости расположены на внутренней стороне нижней поверхности подшипника и вокруг вращающегося вала двигателя, дисплей, датчик натяжения датчики скорости электрически связаны с контроллером (см. CN 203659289, кл. G09B 23/10, оп. в 2014 г.). Это устройство позволяет демонстрировать круговые движения в горизонтальном и вертикальном направлениях, а также может контролировать центростремительную силу и скорость.
Наиболее близким аналогом является вышеописанный патент CN 203659289.
В вышеописанных учебных приборах остается нерешенной задача объединения вопросов одновременного изучения электроники, механики, программирования и алгоритмизации. Наличие проводной связи между датчиками и принимающим устройством мешает проведению экспериментов. Решение данной задачи не ограничивается возможностями только обучения, техническое решение позволяет проводить различные демонстрации и ставить эксперименты.
Настоящее изобретение направлено на решение технической задачи повышения универсальности и многофункциональности учебного прибора за счет автономности экспериментального модуля и реализации возможности беспроводной передачи информации от сенсорных устройств, а также роботизации экспериментального модуля при одновременном обучении основам электроники, электротехники, механики и алгоритмизации.
Решение поставленной технической задачи достигается за счет того, что в учебном приборе, включающем экспериментальный модуль, систему управления с электродвигателем, сенсорные устройства, связанные с дисплеем через контроллер, корпус экспериментального модуля выполнен полым и разъемным, при этом система управления снабжена платой контроллера и платой расширения, связанными между собой, а прибор снабжен аккумулятором с зарядным устройством, эксцентриком, не менее, чем одним маховиком, комплектом проводов, комплектом креплений и рамой для установки оборудования, причем плата контроллера, плата расширения, электродвигатель, эксцентрик, аккумулятор, маховик выполнены с возможностью установки на этой раме, а рама выполнена с возможностью установки внутрь полого разъемного корпуса, причем связь с дисплеем выполнена беспроводной, при этом сенсорные устройства расположены на плате контроллера. Сенсорные устройства включают акселерометр, гироскоп и компас, а плата контроллера включает и/или Bluetooth-модуль, и/или Wi-fi-модуль, и/или радио-модуль, причем плата расширения включает блок зарядки аккумулятора, блок управления электродвигателем и другими силовыми приводами, а также произвольными периферийными устройствами. Полый разъемный корпус экспериментального модуля выполнен шарообразной формы, либо кубической формы, либо каплевидной формы. Прибор снабжен грузом для балансировки и балансировочной пластиной, а плата расширения снабжена сигнальными светодиодами и магнитоуправляемым контактом -герконом, при этом груз для балансировки выполнен с возможностью крепления на раме для установки оборудования. Изобретение поясняется чертежами.
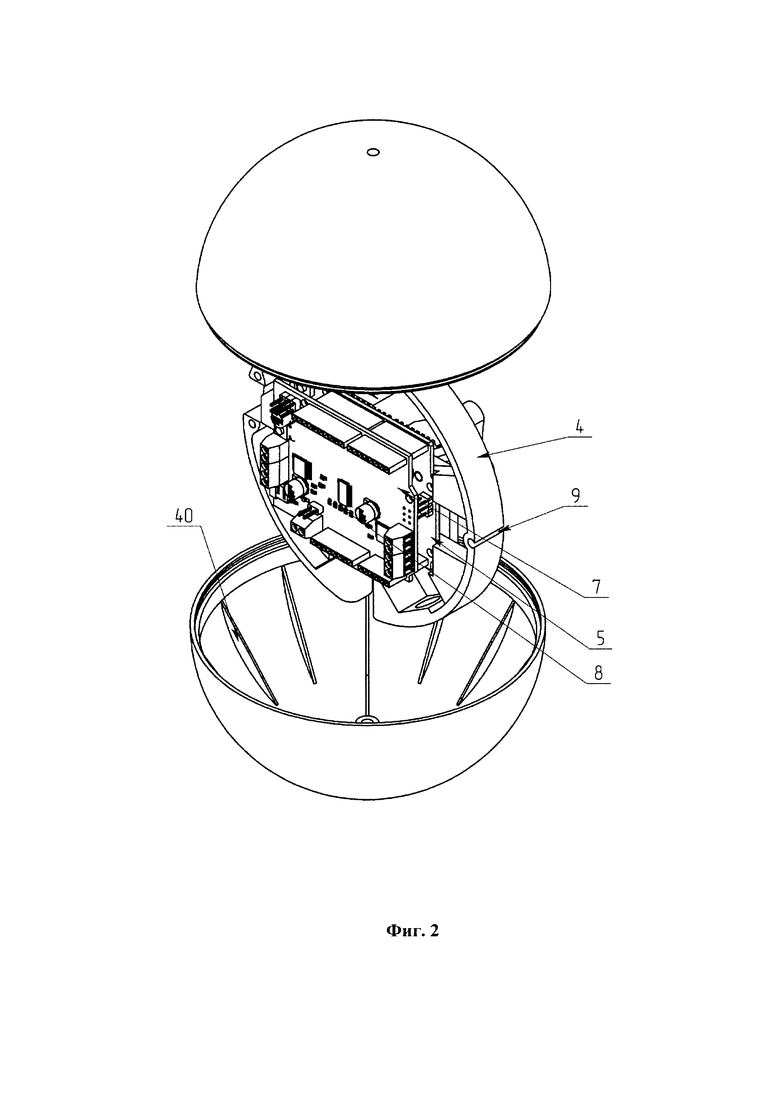
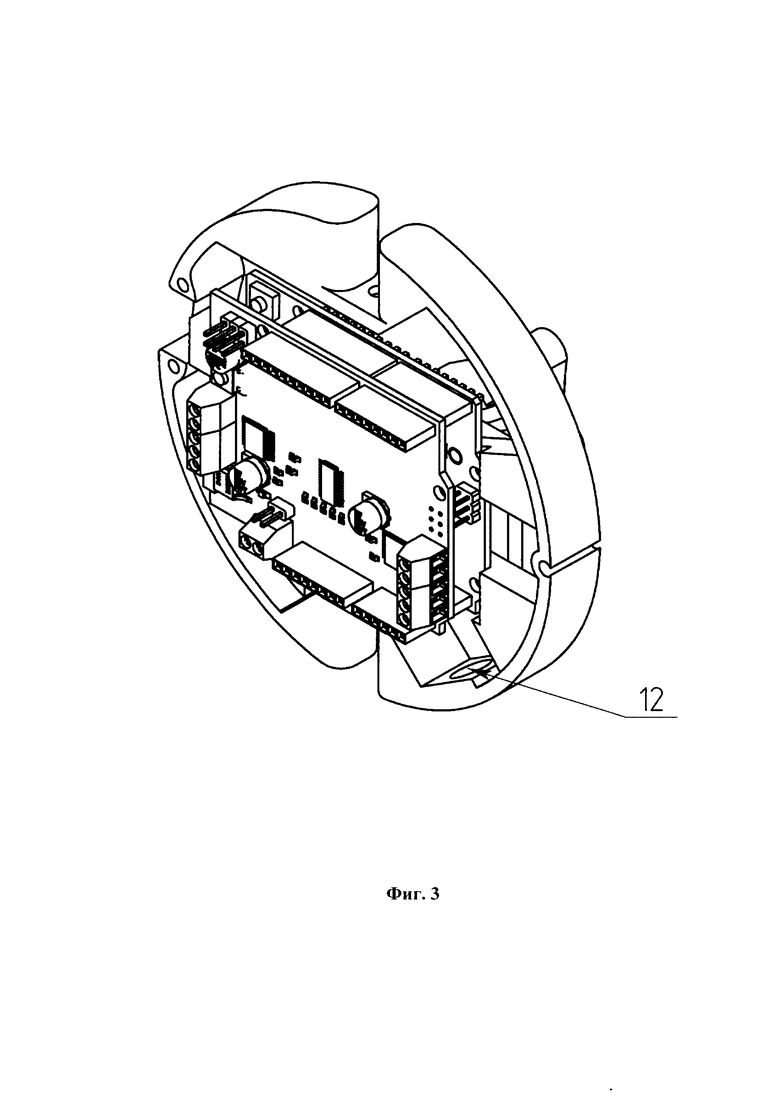
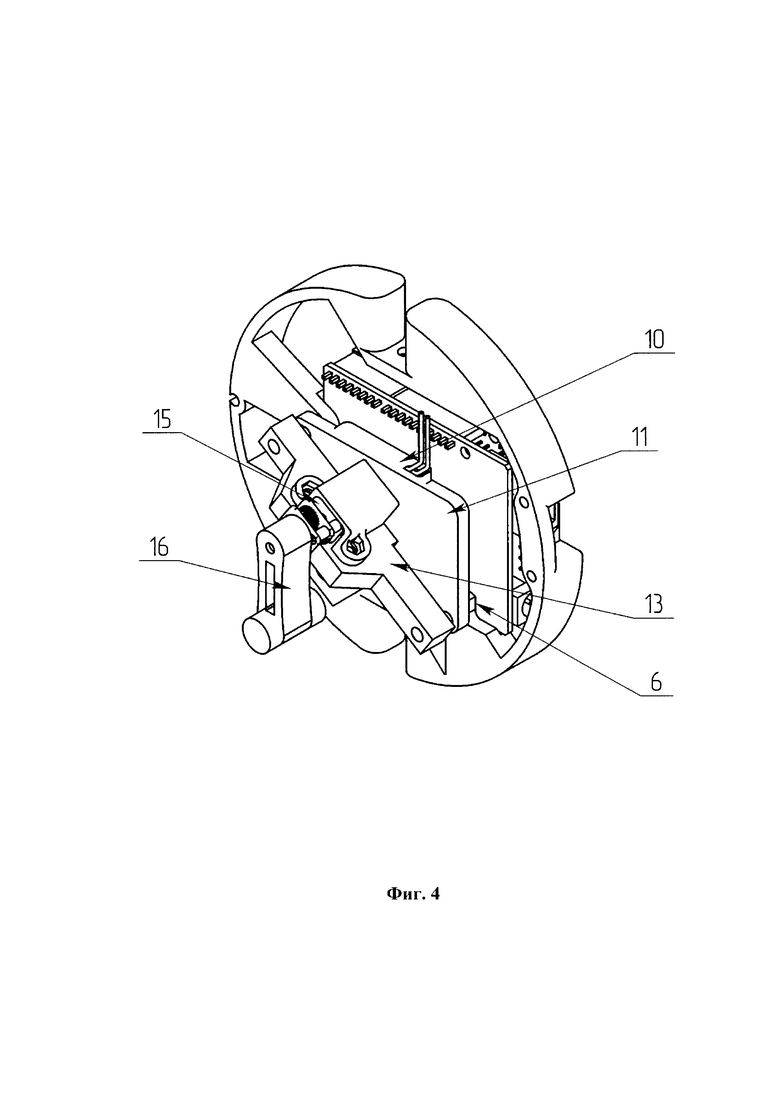
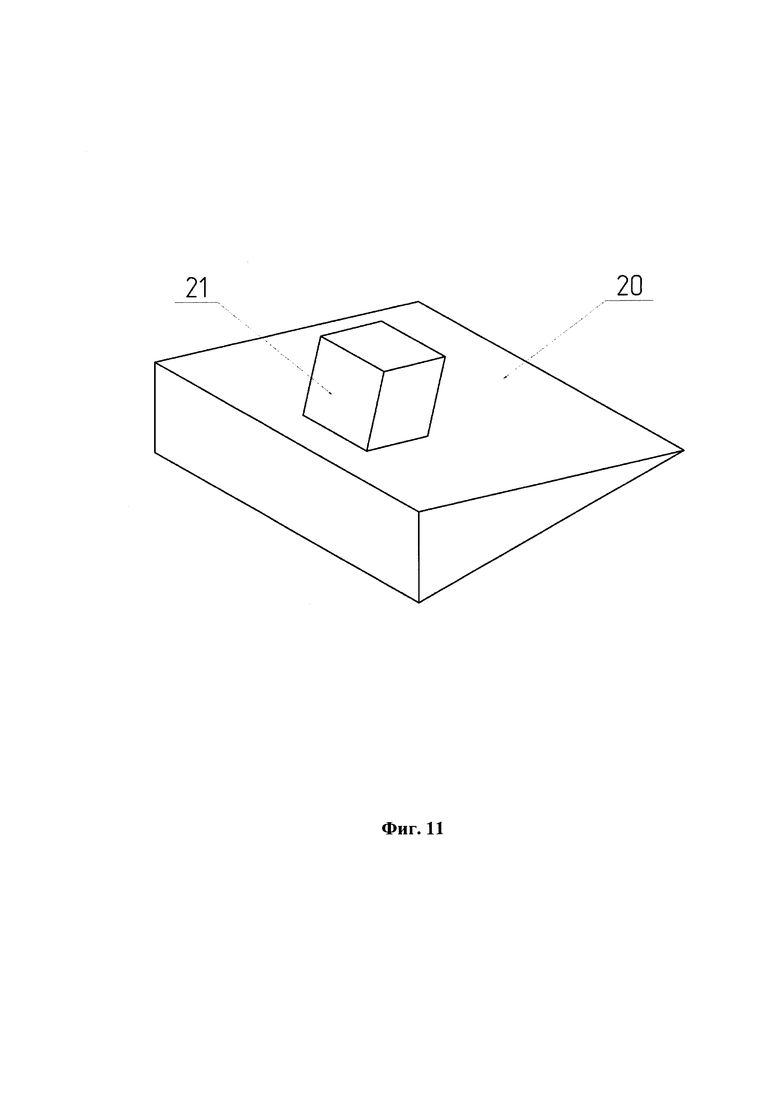
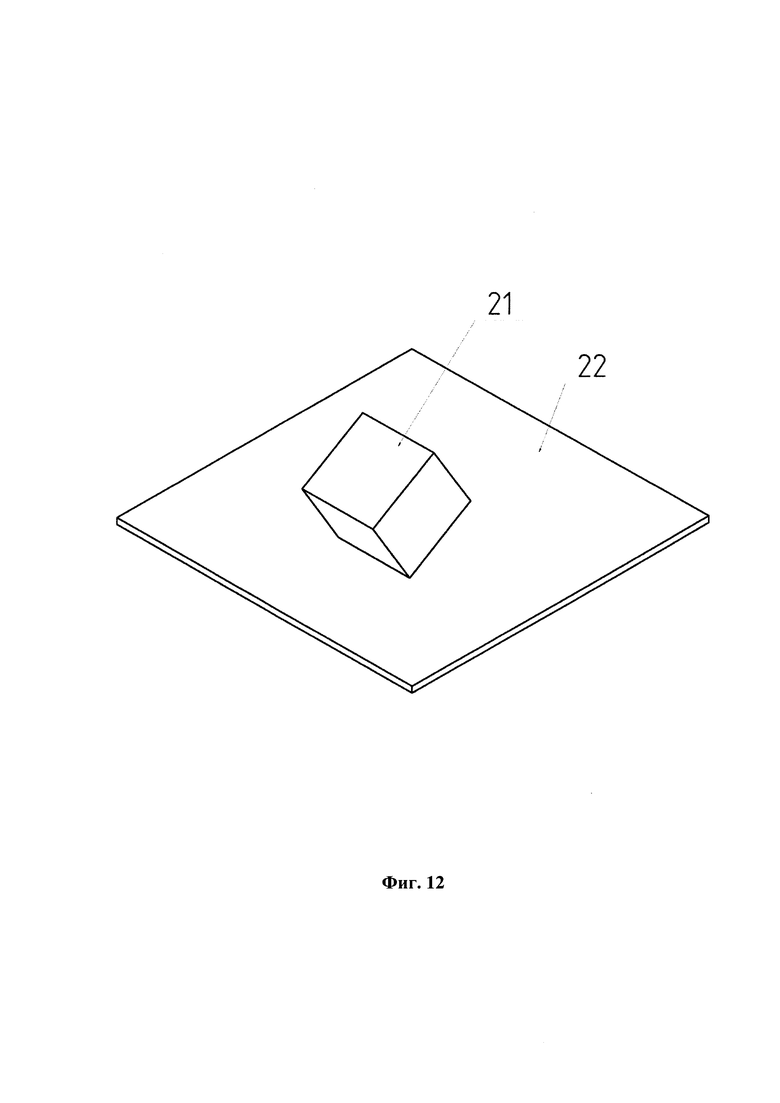
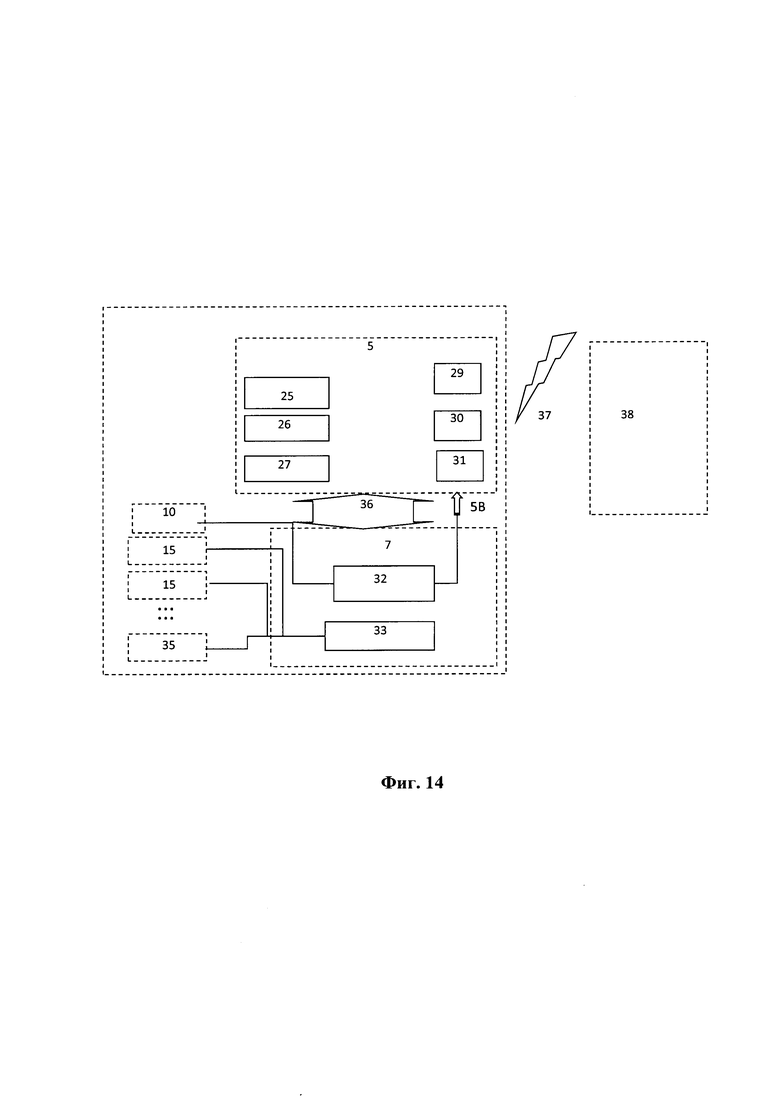
На фиг. 1 изображен обучающий роботизированный экспериментальный модуль учебного прибора с корпусом в форме шара (шарообразный), вид в изометрии. На фиг. 2 - то же, с раскрытым корпусом. На фиг. 3 - то же, оборудование модуля в сборе. На фиг. 4 - то же, оборудование модуля с электродвигателем и эксцентриком. На фиг. 5 - то же, оборудование модуля с маховиком. На фиг. 6 - то же, оборудование модуля с двумя осевыми маховиками. На фиг. 7 - то же, оборудование модуля с двумя перпендикулярно расположенными маховиками. На фиг. 8 изображен пример использования экспериментального шарообразного модуля для демонстрации движения качения по реборде. На фиг. 9 изображен пример использования экспериментального шарообразного модуля для демонстрации движения маятникового подвеса. На фиг. 10 изображен пример использования экспериментального шарообразного модуля для демонстрации движения неориентированного качения по наклонной плоскости. На фиг. 11 изображен пример использования экспериментального модуля с корпусом, выполненным в виде куба (кубического), для демонстрации устойчивости к опрокидыванию. На фиг. 12 изображен пример использования экспериментального кубического модуля для демонстрации удержания равновесия. На фиг. 13 изображен пример использования экспериментального модуля с корпусом, выполненным каплеобразной формы, для демонстрации падения в жидкость аэродинамически обтекаемого тела. На фиг. 14 изображена схема сборки учебного прибора с обучающим роботизированным экспериментальным модулем.
Учебный прибор с обучающим роботизированным экспериментальным модулем представляет собой набор-конструктор для изучения электроники, механики и алгоритмизации, объединяя в себе задачи по механической сборке корпусных элементов, монтажу электрических схем, изучению основ программирования, использованию датчиков для контроля ориентации роботизированного модуля, цифровой обработки сигналов, получаемых от датчиков, взаимодействию различных элементов комплекта посредством проводного протокола, а также взаимодействия комплекта в целом с ПК посредством беспроводного протокола передачи данных. Корпус модуля может быть выполнен разной формы, которую используют в зависимости от задачи, поставленной перед обучающимся, от программы обучения. Это может быть шар или любой эллипсоид вращения (симметричный и несимметричный), куб или параллелепипед, цилиндр или конус. Можно использовать модуль более сложной формы, например, каплеобразной. Учебный прибор с обучающим роботизированным экспериментальным модулем можно использовать в школах, средних учебных заведениях и в высшей школе, а также при проведении различных научных экспериментов.
Учебный прибор основан на выполнении модуля разъемным и полым с расположенным внутри оборудованием. Изображенный на фиг. 1-3 обучающий роботизированный экспериментальный модуль включает в себя полый шарообразный разъемный корпус 1 с линией 2 разъема по экваториальному сечению и отверстиями 3 для потайного крепления оборудования. Рама 4 для крепления и установки оборудования внутрь корпуса 1 имеет ложементы для составных деталей и отверстия для их крепления. Для крепления на раме 4 предназначены плата 5 контроллера (можно использовать Intel Genuino101), груз 6 для балансировки, плата 7 расширения с сигнальными светодиодами 8 и магнитоуправляемым контактом - герконом 9, аккумулятор 10 с прижимной пластиной 11 и разъемом 12 зарядного устройства, балансировочная пластина 13, комплекты проводов (не показано) и комплекта креплений -винтов с гайками (не показано). Для зарядки аккумулятора 10 предназначено не показанное на чертежах зарядное устройство. Такая сборка оборудования представляет собой пассивную конфигурацию и предназначена для демонстрации и проведения экспериментов с неуправляемым движением модуля и сбором информации об этом движении.
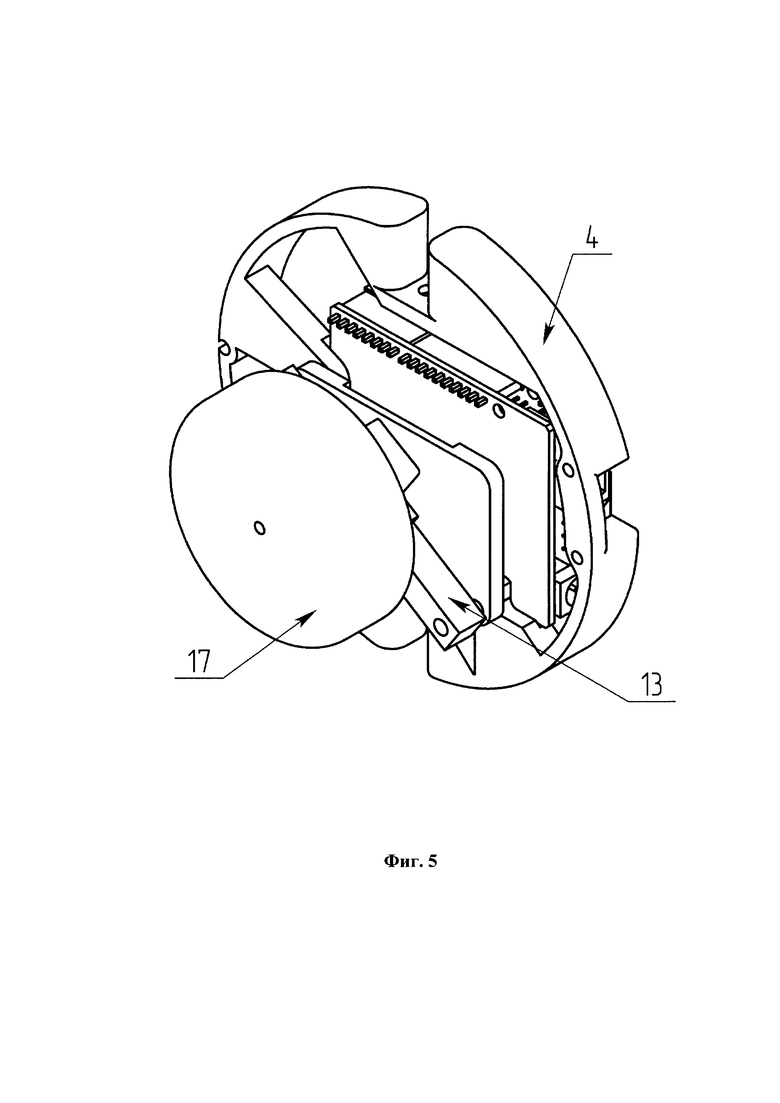
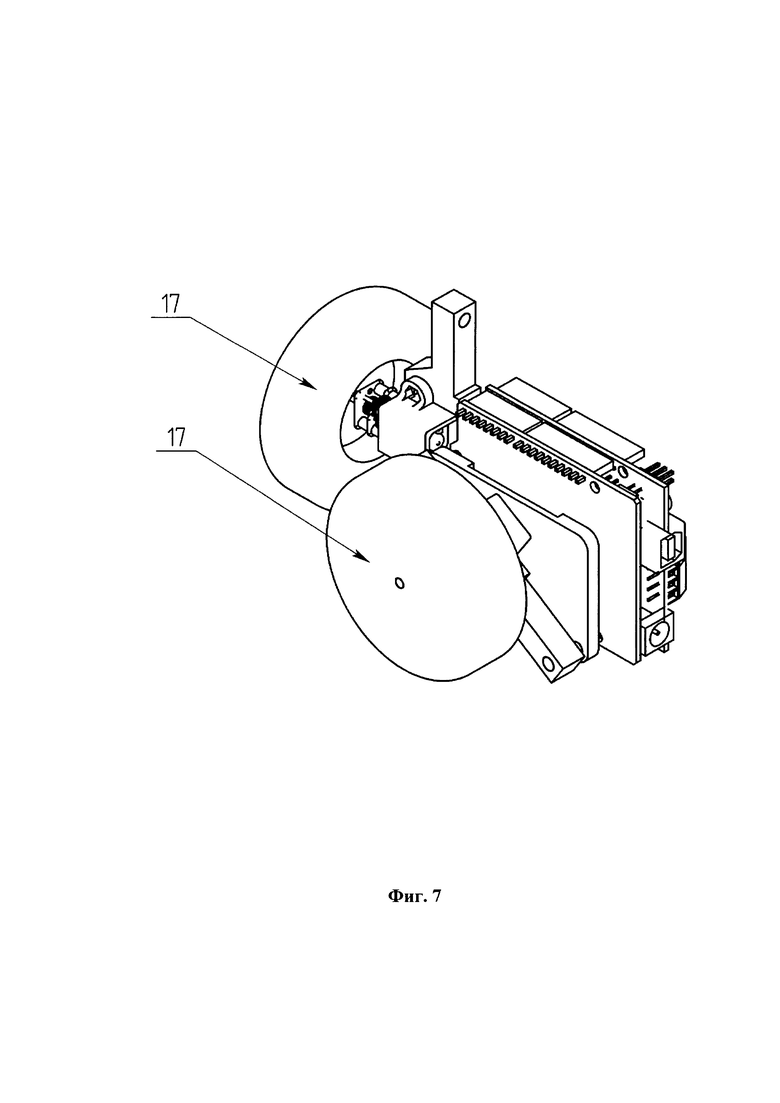
Изображенное на фиг. 4 оборудование содержит электродвигатель 15 и эксцентрик 16. На фиг. 5 показана сборка оборудования с маховиком 17, а на фиг. 6 - с двумя электродвигателями 15 и двумя осевыми маховиками 17. Показанная на фиг. 7 сборка также содержит два электродвигателя 15 и два маховика 17, расположенных в перпендикулярных плоскостях относительно друг друга. Такие сборки оборудования представляют собой активную конфигурацию и предназначены для экспериментов и демонстрации с управляемым движение модуля.
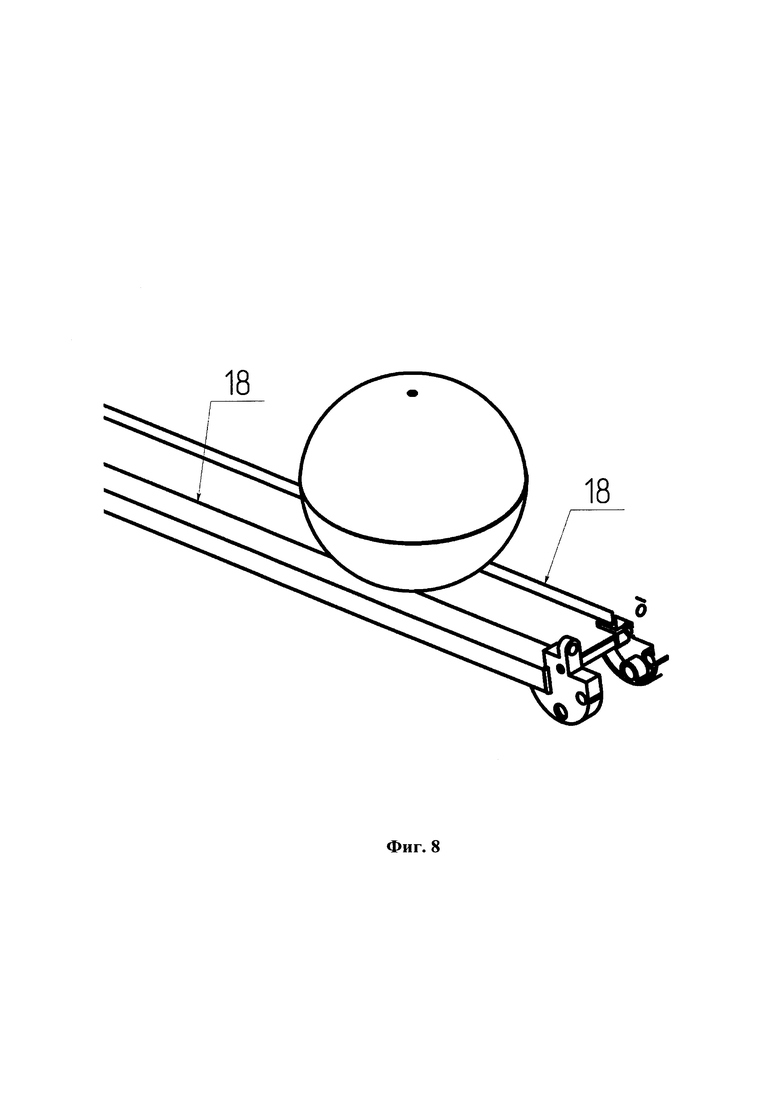
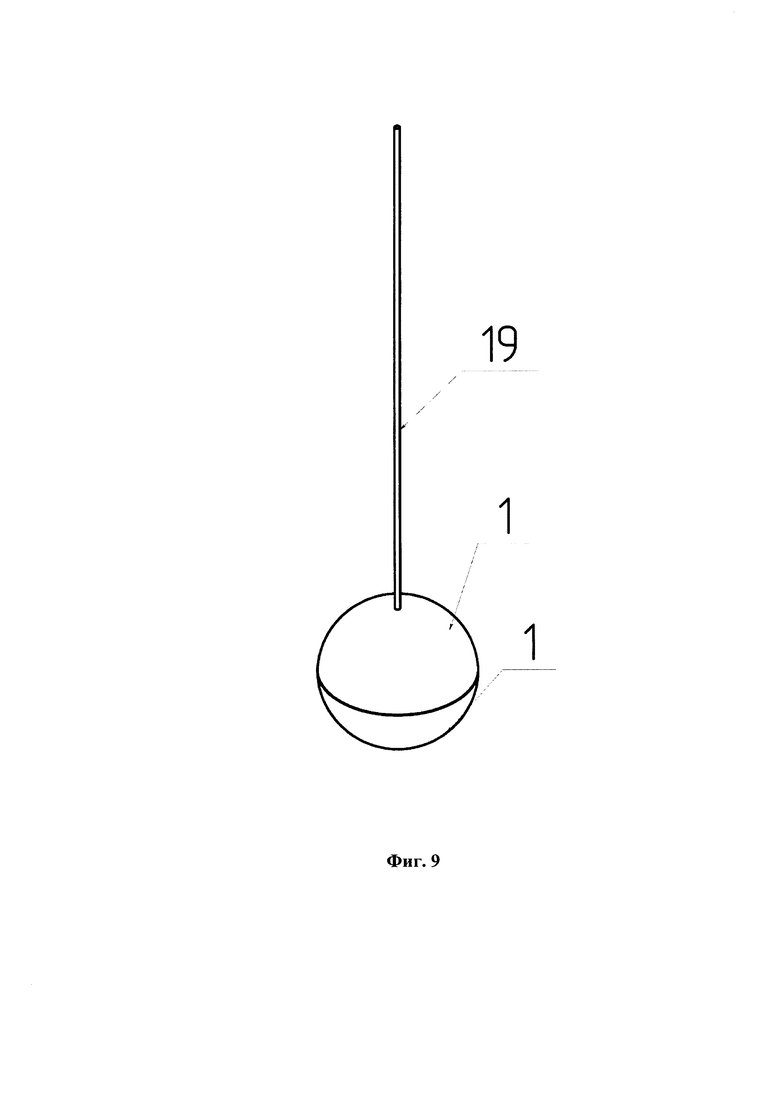
Изображенное на фиг. 8 качение модуля с разъемным шарообразным корпусом 1 по реборде 18 можно осуществлять с любым вариантом вышеперечисленных сборок оборудования, как управляемого, так и неуправляемого. Гибкая пластина подвеса (не показано), комплект нитей 19, втулка подвеса (не показано) служат для подвешивания модуля к перекладине штатива (не показано) и вращения модуля на нити в различных экспериментах (см. фиг. 9). Для демонстрации неориентированного качения модуля с разъемным шарообразным корпусом 1 по наклонной плоскости 20 предназначен опыт, изображенный на фиг. 10.
Для опытов с той же наклонной плоскостью 20 предназначен модуль, выполненный с полым разъемным кубическим корпусом 21 пассивной или активной конфигурации, например, для демонстрации устойчивости к опрокидыванию (см. фиг. 11). Оборудование, установленное в полом разъемном кубическом корпусе 21, аналогично вышеописанному. Опыты с удержанием равновесия модулем с разъемным кубическим корпусом 21 и активной конфигурацией можно проводить на горизонтальной плоскости 22 (см. фиг. 12). Изображенная на фиг. 13 схема проведения опыта с модулем, имеющим каплеобразную форму полого разъемного корпуса 23, предназначена для демонстрации и изучения свойств аэродинамически обтекаемого тела при падении в жидкость, находящуюся в сосуде 24. Оборудование, установленное в полом разъемном корпусе 23, аналогично вышеописанному. В зависимости от назначения опыта собирают детали оборудования в сборку, помещаемую внутрь разъемного корпуса 21 или 23, по тем же схемам, как на предыдущих чертежах с шарообразным модулем.
Примерная схема сборки оборудования роботизированного экспериментального модуля, показанная на фиг. 14 включает плату 5 контроллера (платформу открытой архитектуры) и плату 7 расширения (плату управления периферийными устройствами). В плату 5 вошли комплекс сенсорных устройств, включая акселерометр 25, гироскоп 26 и компас 27, Bluetooth-модуль 29, Wi-fi-модуль 30, а также может быть использован радио-модуль 31. К плате 7 относятся блок 32 зарядки аккумулятора 10, блок 33 управления, который связан с электродвигателем 15 и другими силовыми приводами 34, а также с произвольными периферийными устройствами 35. Плата 5 и плата 7 сообщаются шиной 36 обмена данными. Беспроводную связь осуществляют посредством либо Bluetooth-, либо Wi-fi-, либо радио- канала 37 связи, через который экспериментальный модуль имеет выход на дисплей 38 компьютера, либо планшета, либо телефона, либо смартфона либо подобного устройства.
Учебный прибор с обучающим роботизированным экспериментальным модулем предназначен для поставки в учебные заведения в виде набора-конструктора с инструкцией по сбору различных вариантов модуля для проведения опытов и демонстраций и всеми необходимыми для этого деталями. Плата 7 расширения обеспечивает дистанционное управление обучающим модулем, например, с компьютера через Bluetooth-модуль 29, подключение аккумулятора 10 к электронным схемам, сигнализацию о состоянии устройства с помощью зеленого и красного светодиодов 8. Сигнальные светодиоды 8 и магнитоуправляемый контакт (геркон 9) поставляются припаянными с помощью гибких кабелей к плате 7 расширения. В собранном виде плата 5 контроллера и плата 7 расширения экспериментального модуля связаны межу собой шиной 36, установлены на раме 4 и помещены внутрь шарообразного корпуса 1 в предназначенные для них ложементы. Зарядку аккумулятора 10 осуществляют без разъединения полушарий корпуса 1 с помощью зарядного устройства через разъем 12 зарядного устройства, укрепленный на раме 4.
В зависимости от задачи, которая будет поставлена для обучения, учебный прибор передают обучающимся либо в собранном виде, либо в разобранном. Собирают прибор следующим образом. Сборку варианта, изображенного на фиг. 1-3, производят с использованием комплекта креплений - винтов и гаек (не показано). Винты с потайными головками (не показано) нужны в конце сборки для крепления полушарий корпуса 1 к раме 4. Устанавливают плату 5 контроллера на раме 4, затем крепят груз 6 балансировки. Плату 7 расширения закрепляют на плате 5 контроллера путем введения всех контактов платы 7 в гнезда на плате 5, затем легким сдавливанием плат 5 и 7 соединяют до упора. После этого сигнальные светодиоды 8 и магнитоуправляемый контакт (геркон 9) на гибких проводах вводят в соответствующие гнезда рамы 4. Кабель, идущий от расположенного на раме 4 разъема 12, соединяют с контактами на плате 7 с соблюдением полярности.
Затем аккумулятор 10 устанавливают на плату 5 контроллера и прижимают пластиной 11 крепления аккумулятора 10 к плате 5, закрепляя винтами. Паз в пластине 11 совпадает с контуром корпуса аккумулятора 10. Кабель аккумулятора 10 протаскивают на противоположную сторону рамы 4 и соединяют с платой 7 расширения с соблюдением полярности. Раму 4 с установленными на ней элементами закрепляют в шарообразном корпусе 1. Рама 4 плотно входит между ребрами жесткости 40 полушария корпуса 1 и прилегает к поверхности полушария. Верхним полушарием с отверстием для разъема 12 разрядного устройства закрывают нижнее так, чтобы разъем 12 был напротив отверстия для него в шарообразном корпусе 1. Закрепляют потайными винтами в отверстиях 3.
При сборке оборудования модуля, изображенного на фиг. 4, с электродвигателем 15 и эксцентриком 16 для проведения нескольких экспериментов, заключающихся в управлении перемещения деталей внутри корпуса 1 через Bluetooth-модуль 29, на раме 4 проводят дополнительный монтаж электродвигателя 15, на оси которого крепят диск с эксцентриком 16. Для сборки модуля, изображенного на фиг. 5, вместо эксцентрика 16 на валу электродвигателя 15 устанавливают маховик 17, а для получения конструкции модуля в соответствии с фиг. 6, на раме 4 симметрично устанавливают два электродвигателя 15 с маховиками 17. Сборка по фиг. 7 предполагает перпендикулярную установку двух электродвигателей 15 с маховиками 17. Для проведения опытов в соответствии с фиг. 9 следует под винт, скрепляющий верхнее полушарие с рамой 4, подложить втулку подвеса и закрепить нить 19. Модули, изображенные на фиг. 11-13, собирают способом, аналогичным вышеописанному. Комплектация сборки зависит от задач, которые будут поставлены перед обучающимися. Собранный обучающий роботизированный экспериментальный модуль пассивной конфигурации работает в режиме сбора и передачи данных о характере собственного движения, а экспериментальный модуль активной конфигурации еще и совершает управляемое движение, заданное программой, либо осуществляемое человеком через беспроводную связь.
Учебный прибор с обучающим роботизированным экспериментальным модулем можно использовать в самых разнообразных экспериментах и демонстрациях. Например, ориентированное и неориентированное качение обучающего модуля пассивной конфигурации шарообразной формы, собранного в соответствии с изображением на фиг. 2 и 3, либо в виде эллипсоида вращения (не показано), либо в виде цилиндра (не показано) по наклонной плоскости 20, горизонтальной плоскости 2 или реборде 18. Это дает возможность исследовать характер скорости, ускорение движения, скорость качения и скорость вращения, возникающие при движении обучающего экспериментального модуля гироскопические моменты, углы поворота и траекторию движения. Сигналы, поступающие от сенсорных устройств (акселерометра 25, гироскопа 26, компаса 27) через канал 37 связи к принимающему устройству (компьютеру, планшету, смартфону), отражаются на дисплее 38 в цифровом виде, либо в виде таблиц, либо кривых и т.д., обрабатываются процессором и сохраняются для дальнейшего анализа. Причем в зависимости от формы модуля будут отличаться его движение и сигналы от сенсорных устройств.
Более сложный обучающий модуль активной конфигурации, собранный в соответствии с изображением на фиг. 4, снабженный электродвигателем 15 и эксцентриком 16, с управляемым перемещением деталей внутри шарообразного корпуса 1 (а также эллипсоида вращения и цилиндра), можно также использовать для исследования ориентированного и неориентированного качения обучающего модуля, скорости и ускорения движения, скорости качения и скорости вращения, том числе и возникающих при движении обучающего модуля с эксцентриком 16 гироскопических моментов, углов поворота и траектории движения. Такой обучающий модуль может управляемо двигаться вверх и вниз по наклонной плоскости 20, реборде 18, совершать различные движения на горизонтальной плоскости 22.
Обучающие модули с шарообразным корпусом 1, изображенные на фиг. 5, 6, 7, (а также эллипсоида вращения и цилиндра), снабженные маховиками 17, можно использовать для определения гироскопического момента, инерционных сил и момента инерции, исследования изменения траектории движения обучающего модуля, ускорения и замедления движения обучающего модуля в зависимости от совпадения либо несовпадения направления движения модуля и маховика 17, либо маховиков 17. Обучающий модуль пассивной конфигурации - не имеющий двигающихся деталей внутри корпуса 1, и активной конфигурации - имеющий электродвигатель 15 с эксцентриком 16, либо с маховиком 17 или маховиками 17, будут вести себя по-разному, будучи подвешенными на нити 19, как изображено на фиг. 9. Такие сборки позволяют проводить опыты с маятниковым подвесом, имеющим инерционное качание, либо управляемое движение.
Обучающий модуль с кубическим корпусом 21 (или в виде параллелепипеда - не показано) активной конфигурации с подвижными деталями (например, электродвигателем 15 и маховиком 17) внутри можно использовать, например, в эксперименте, изображенном на фиг. 11, определяя устойчивость к опрокидыванию. Обучающий модуль с кубическим корпусом 21 (или в виде параллелепипеда) активной конфигурации с подвижными деталями внутри (электродвигателем 15 и эксцентриком 16, либо маховиком (маховиками) 17, управляемый через Bluetooth-модуль 29, можно использовать, например, в экспериментах, изображенных на фиг. 11 и 12, определяя устойчивость к опрокидыванию, движение вверх по наклонной плоскости, движение с эксцентриситетом или удержание равновесия и многое другое.
Обучающий модуль с шарообразным корпусом 1, каплеобразным корпусом 23 (или в виде эллипсоида вращения, или в виде конуса - не показано) пассивной конфигурации - без подвижных деталей внутри корпуса 1 или корпуса 23 можно использовать, например, в эксперименте, изображенном на фиг. 13, для демонстрации и изучения свойств аэродинамически обтекаемого тела при падении в жидкость, находящуюся в сосуде 24. При этом сигналы, поступающие от сенсорных устройств (акселерометра 25, гироскопа 26, компаса 27) через канал 37 связи к принимающему устройству (компьютеру, планшету, смартфону) отражаются на дисплее 38 в цифровом виде, либо в виде таблиц, либо кривых и т.д., обрабатываются процессором и сохраняются для дальнейшего анализа.
Поскольку перед проведением экспериментов с обучающим роботизированным экспериментальным модулем ученики либо студенты предварительно должны ознакомиться с основами электроники и алгоритмизации, а затем собрать экспериментальный модуль, протестировать его работу и выполнить задания по изучению механики с помощью этого модуля, то его использование в программе обучения дает возможность одновременного получения не только теоретических знаний, но и приобретения практических навыков в работе с электронной и измерительной техникой.
Таким образом, технический результат, достигаемый с использованием заявленного изобретения, заключается в повышении универсальности и многофункциональности учебного прибора за счет автономности экспериментального модуля и реализации возможности беспроводной передачи информации от сенсорных устройств, а также роботизации экспериментального модуля при одновременном обучении основам электроники, электротехники, механики и алгоритмизации.



Изобретение относится к учебным приборам и предназначено для изучения основ электроники, механики, программирования и алгоритмизации. Учебный прибор включает экспериментальный модуль, систему управления с электродвигателем, сенсорные устройства, связанные с дисплеем через процессор, при этом корпус экспериментального модуля выполнен полым и разъемным, а система управления снабжена платой контроллера и платой расширения, связанными между собой, прибор снабжен аккумулятором с зарядным устройством, эксцентриком, не менее чем одним маховиком, комплектом проводов, комплектом креплений и рамой для установки оборудования, причем плата контроллера, плата расширения, электродвигатель, эксцентрик, аккумулятор, маховик выполнены с возможностью установки на этой раме, а рама выполнена с возможностью установки внутрь полого разъемного корпуса, причем связь с дисплеем выполнена беспроводной, при этом сенсорные устройства расположены на плате контроллера. Это позволяет повысить универсальность и многофункциональность учебного прибора за счет автономности экспериментального модуля и реализации возможности беспроводной передачи информации от сенсорных устройств, а также роботизации экспериментального модуля при одновременном обучении основам электроники, электротехники, механики и алгоритмизации. 3 з.п. ф-лы, 14 ил.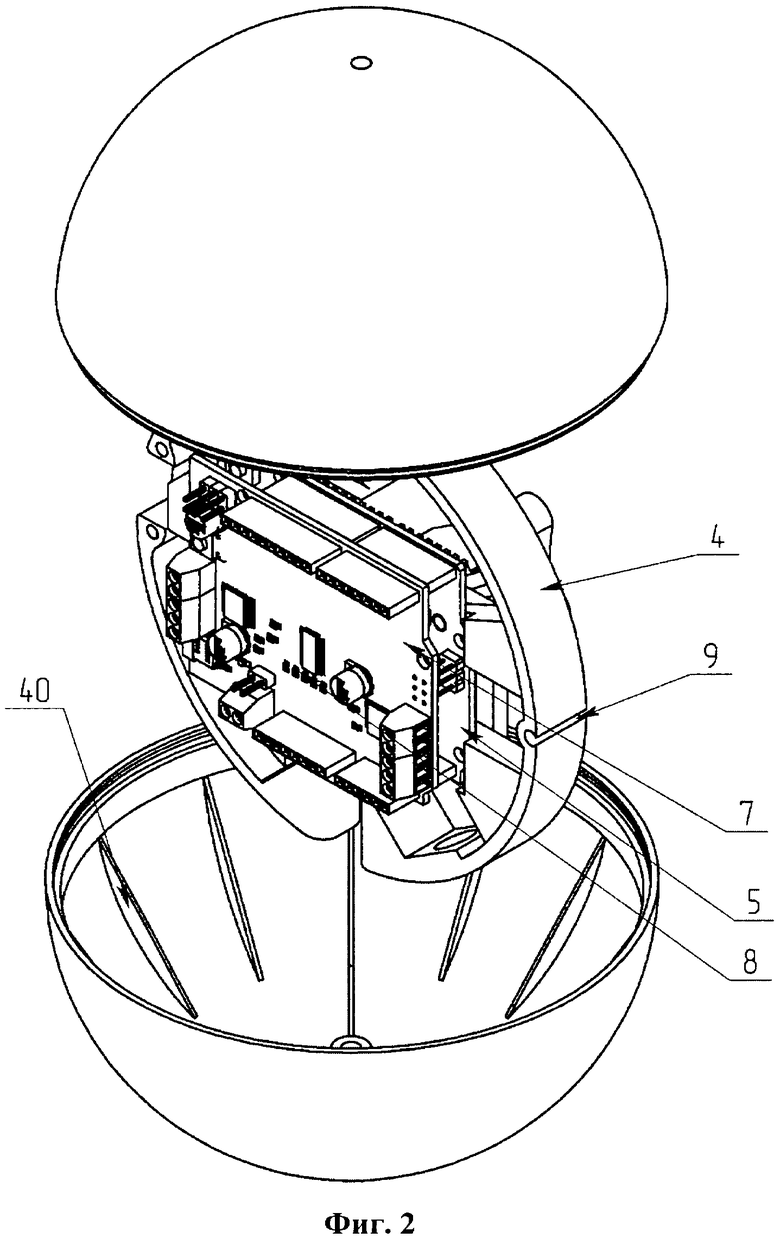
1. Учебный прибор, включающий экспериментальный модуль, систему управления с электродвигателем, сенсорные устройства, связанные с дисплеем через контроллер, отличающийся тем, что корпус экспериментального модуля выполнен полым и разъемным, при этом система управления снабжена платой контроллера и платой расширения, связанными между собой, а прибор снабжен аккумулятором с зарядным устройством, эксцентриком, не менее чем одним маховиком, комплектом проводов, комплектом креплений и рамой для установки оборудования, причем плата контроллера, плата расширения, электродвигатель, эксцентрик, аккумулятор, маховик выполнены с возможностью установки на этой раме, а рама выполнена с возможностью установки внутрь полого разъемного корпуса, причем связь с дисплеем выполнена беспроводной, при этом сенсорные устройства расположены на плате контроллера.
2. Прибор по п. 1, отличающийся тем, что сенсорные устройства включают акселерометр, гироскоп и компас, а плата контроллера включает и/или Bluetooth-модуль, и/или Wi-fi-модуль, и/или радио-модуль, причем плата расширения включает блок зарядки аккумулятора, блок управления электродвигателем и другими силовыми приводами, а также произвольными периферийными устройствами.
3. Прибор по п. 1, отличающийся тем, что полый разъемный корпус экспериментального модуля выполнен шарообразной формы, либо в виде симметричного или несимметричного эллипсоида вращения, либо кубической формы, либо в виде параллелепипеда, либо в виде цилиндра, либо в виде конуса, либо каплевидной формы.
4. Прибор по п. 1, отличающийся тем, что он снабжен грузом для балансировки и балансировочной пластиной, а плата расширения снабжена сигнальными светодиодами и магнитоуправляемым контактом - герконом, при этом груз для балансировки выполнен с возможностью крепления на раме для установки оборудования.
| УЧЕБНЫЙ ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ПЛАНЕТАРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧИ С ПОМОЩЬЮ КОДОСКОПА | 2004 |
|
RU2279716C1 |
| US 5601433 A1, 11.02.1997 | |||
| US 8933595 B2, 13.01.2015 | |||
| CN 103325290 A, 25.09.2013 | |||
| US 9406240 B2, 02.08.2016 | |||
| CN 105405324 A, 16.03.2016 | |||
| Спортивный двухтактный мотоциклетный двигатель | 1960 |
|
SU132913A1 |
| 0 |
|
SU161802A1 | |

