Изобретение относится к учебным приборам и предназначено для изучения конструкции и аэродинамики мультироторных беспилотных аппаратов в режиме свободного полета и в режиме «полет на привязи», а также электротехники, электроники и других прикладных курсов, связанных с конструированием БПЛА, их балансировкой, испытаниями и тонкостями управления, изучением аэродинамики полета.
Из области техники известен обучающий программируемый квадрокоптер, состоящий из рамы, полетного контроллера Holybro Kakute h7v2, регулятора оборотов 4 в 1 Mamba 140, приемника радиоуправления, 4-х моторов Mamba Тока 1404 3000 kv, камеры для микрокомпьютера Raspberry Pi, лазерного дальномера VL5311x, микрокомпьютера Raspberry Pi Zero 2w, 3D печатной защиты и 3D печатных ножек шасси, квадрокоптер имеет разработанную компактную раму квадрокоптера 155 мм из стеклотекстолита, предусматривающую крепеж под полетный контроллер, регулятор оборотов 4 в 1, 4 мотора Mamba Тока 1404 3000 kv, камеру для микрокомпьютера Raspberry Pi, лазерный дальномер V15311x, которые устанавливаются на раму посредством винтового соединения, при этом микрокомпьютер Raspberry Pi Zero 2w устанавливается в крепеж - кейс, который, в свою очередь, вместе с защитой и ножками шасси устанавливается на раму посредством защелкивающегося соединения (см. патент на изобретение RU №2798299, Кл. В64С 39/02, опубл. в 2023 г.). Это сложное техническое решение имеет функцию программирования автономного полета в помещении, оснащено полноценной защитой пропеллеров, позволяет производить многоразовую сборку/разборку устройства.
Известна игрушка квадрокоптер, включающая основной корпус фюзеляжа, четыре несущих винта и круглое декоративное кольцо, в котором круглое декоративное кольцо неподвижно соединено с горизонтальным вращающимся валом; горизонтальный вращающийся вал проходит через основной корпус фюзеляжа; две установочные детали расположены в эксцентричном положении одной из шестерен трансмиссии; собачка, взаимодействующая с двумя установочными деталями, установлена в основном корпусе фюзеляжа; и собачка не блокирует вращение установочных деталей по часовой стрелке вокруг центральной оси трансмиссии, но блокирует вращение против часовой стрелки одной из шестерен трансмиссии, установочные детали расположены вокруг центральной оси зубчатой передачи, круглое декоративное кольцо снабжено светодиодной лентой, светодиодная лента может вращаться и останавливаться в фиксированных точках (см. US 2024173639, Кл. А63Н 27/00, опубл. в 2024 г.). В отличие от предыдущего технического решения этот квадрокоптер предназначен для детей, а его конструкция направлена на повышение зрелищности восприятия ребенка. В корпусе квадрокоптера предусмотрены два декоративных кольца, одно из которых охватывает корпусы моторов, а другое расположено снаружи и снабжено светодиодной лентой.
Наиболее близким аналогом к заявленному изобретению является мультикоптер, содержащий электродвигатели с несущими винтами и кольца из полимерного материала, установленные вокруг несущих винтов, при этом указанные кольца из полимерного материала закреплены между двумя - верхней и нижней параллельными и соединенными между собой посредством стоек пластинами, образующими индивидуальные защитные кольца вокруг вращающихся несущих винтов, при этом электродвигатели установлены на опорных рычагах одной из пластин, а несущий винт не выступает за плоскости внешних поверхностей пластин (см. патент на изобретение RU №2685107, Кл. В64С 27/08, опубл. в 2019 г.). Конструкция мультикоптера, ограниченная сверху и снизу плоскостями внешней поверхности кольцевых пластин, обеспечивает высокую степень мобильности, позволяющей устройству «проскальзывать» между такими препятствиями, как ветки деревьев или параллельно висящие провода без ущерба устройству и без угрозы зацепиться с последующим падением. При касательном столкновении мультикоптеров, благодаря их форме, также низки риски поломки или падения, конструкция мультикоптера обеспечивает высокую его мобильность в условиях, осложненных наличием препятствий, а монолитное исполнение конструкции колец из полимерного материала обеспечивает дополнительную жесткость конструкции.
Техническая проблема заключается в том, что описанные устройства не предназначены для использования в интерактивных обучающих школьных программах. Конструкции этих объектов не предусматривают возможности многократной сборки-разборки квадрокоптера для изучения его конструкции и аэродинамики полета в школьной программе. Возможности вышеописанных устройств ограничены узконаправленными задачами. В них остается нерешенной задача достижения максимальной простоты и наглядности, когда школьники сами собирают квадрокоптер и проводят его исследования. Решение данной задачи не должно ограничиваться только возможностью обучения, оно должно давать возможность проводить различные демонстрации и ставить эксперименты.
Настоящее изобретение направлено на решение технической задачи повышения доступности и наглядности деталей квадрокоптера с возможностью проведения многократной его сборки-разборки и безопасных испытаний, проведения различных демонстраций и изменения условий проведения опытов и экспериментов при визуализации получаемых результатов.
Решение поставленной технической задачи достигается за счет того, что в учебном квадрокоптере, содержащем сборный корпус с плоской кольцеобразной рамой защитного типа, внутри которой расположены четыре мотора с втулками и винтами, аккумулятор и электронная плата, корпус выполнен из верхнего и нижнего крестообразных оснований и плоской кольцевой рамы, связанных между собой посредством сборно-разборных креплений на втулках, выполненных с канавками под крепления, при этом кольцевая рама снабжена полудугами, расположенными на ее внешней стороне в зоне размещения винтов, причем аккумулятор установлен между крестообразными основаниями в их центральной части, а электронная плата размещена на верхнем крестообразном основании. Плоская кольцевая рама снабжена дополнительными полудугами, установленными под небольшим углом к плоскости рамы. Нижнее крестообразное основание снабжено опорными цилиндрическими ножками.
Изобретение поясняется фигурами.
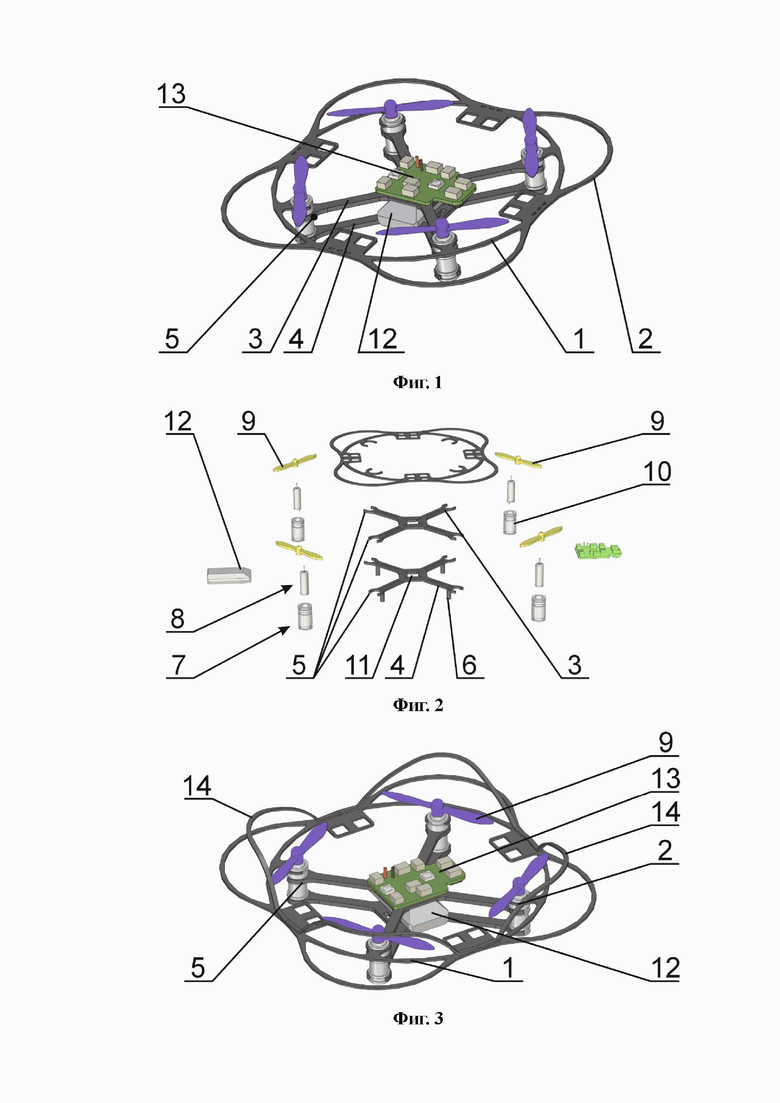
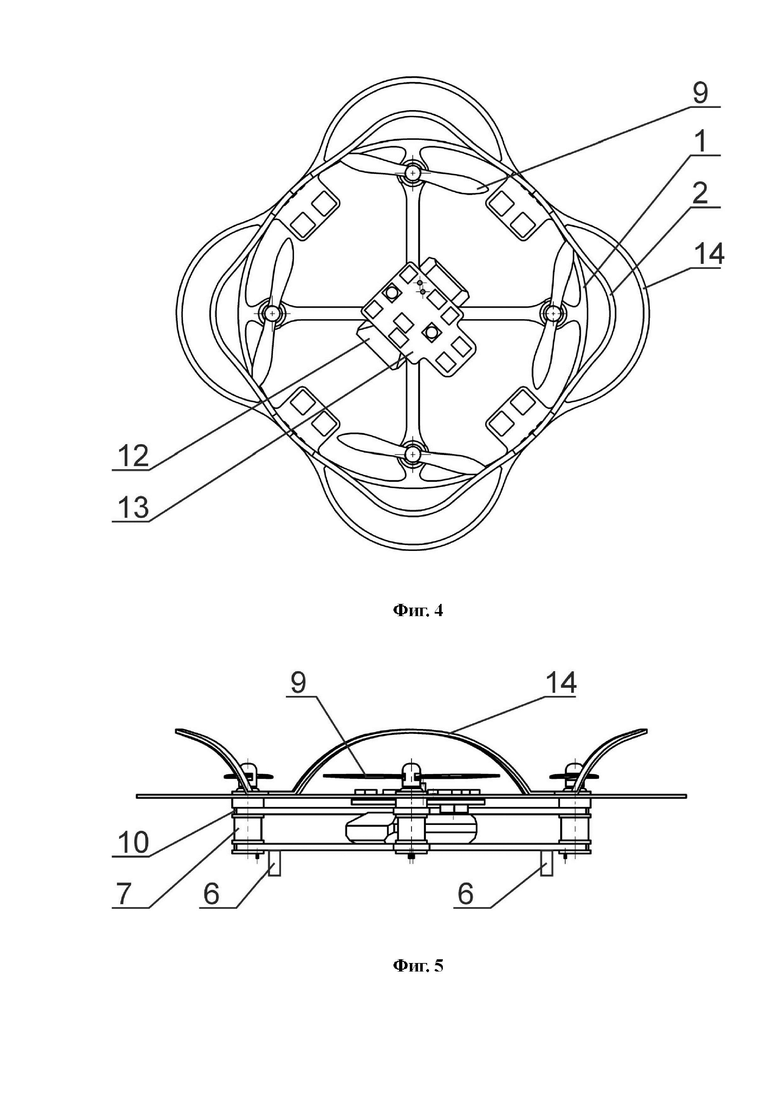
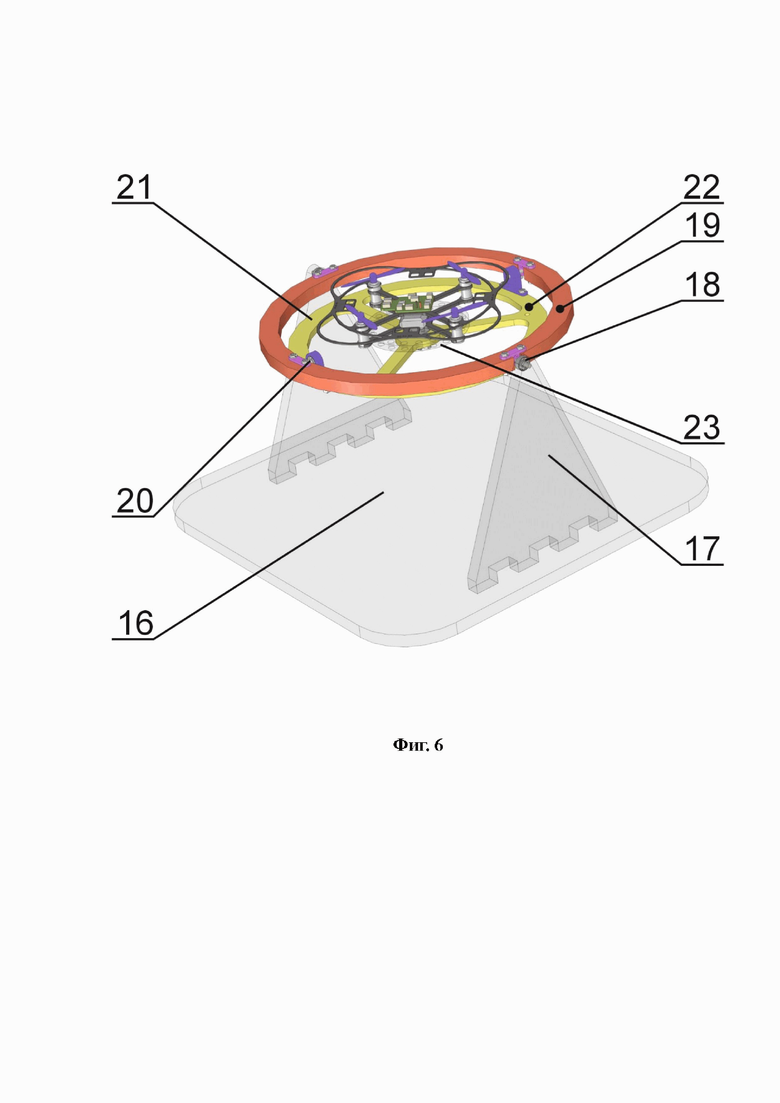
На фиг. 1 изображен учебный квадрокоптер, в изометрии. На фиг. 2 - то же, перед сборкой. На фиг. 3 - квадрокоптер повышенной безопасности, в изометрии. На фиг. 4 - то же, вид сверху. На фиг. 5 - то же, вид сбоку. На фиг. 6 - учебный квадрокоптер в сборе с исследовательским модулем по типу «полет на привязи».
Учебный квадрокоптер предназначен для многократной сборки-разборки, изучения конструкции и аэродинамики при решении задач, связанных с управлением мультироторных беспилотных аппаратов, исследований особенностей их движения, балансировки и совершенствования в режимах свободного полета и «полета на привязи», а также для проведения занятий в интерактивном режиме.
В конструкции учебного квадрокоптера использованы в основном легкие и прочные пластиковые детали (или детали из материалов с подобными свойствами), что особенно важно для работы по школьным программам. Квадрокоптер (четырехмоторный беспилотной летательный аппарат) имеет облегченную пространственную конструкцию: его корпус включает плоскую раму 1, которая изготовлена из пластика и представляет собой кольцо, внутри которого размещены элементы крепления, а снаружи установлены защитные полудуги 2, изготовленные из такого же легкого и прочного пластика. Корпус квадрокоптера снабжен двумя крестообразными пластиковыми основаниями 3 и 4 с элементами 5 креплений. Основание 4 имеет опорные цилиндрические ножки 6. Все вышеперечисленные детали связаны между собой посредством втулок 7 моторов 8 с винтами 9. Втулки 7 имеют на своей цилиндрической поверхности канавки 10 для размещения в них всех элементов креплений 5 рамы 1 и оснований 3 и 4. В центре оснований 3 и 4 имеется монтажное отверстие 11. Между основаниями 3 и 4 установлен аккумулятор 12, а на верхнем основании 3 установлена электронная плата 13. В конструкции использованы соединения фрикционного типа, которые легко собираются и разбираются.
Поскольку модуль предназначен для обучения детей, которые не только его собирают и разбирают, но и испытывают, то конструкция квадрокоптера с винтами 9 моторов 8 должна иметь средства защиты для исключения травм от вращающихся винтов 9. Такими средствами могут быть защитные полудуги 2, расположенные с наружной стороны рамы 1 (см. фиг. 1). А также дополнительные облегченные пластиковые полудуги 14 (см. фиг 5), установленные под небольшим углом к плоскости рамы таким образом, чтобы полностью перекрывать доступ к винтам 9.
Учебный квадрокоптер собирают следующим образом. Два крестообразных пластиковых основания 3 и 4 с элементами креплений 5 и плоскую раму 1, имеющие свои элементы креплений, соединяют с помощью втулок 7. При этом втулки 7 предварительно укомплектованы винтами 9 и моторами 8. Основания 3 и 4 и раму 1 фиксируют элементами креплений 5 в канавках 10, выполненных на поверхности втулок 7. Между крестообразными пластиковыми основаниями 3 и 4 устанавливают аккумулятор 12, а на основании 3 закрепляют электронную плату 13. Поскольку основание 4 имеет опорные цилиндрические ножки 6, квадрокоптер выставляют горизонтально на эти ножки 6.
Изучение свойств квадрокоптера можно начинать по разным программам. Одна из них предусматривает исследование в режиме «полет на привязи» с изучением аэродинамики полета.
Исследовательский модуль, на котором проводят исследование в режиме «полет на привязи», содержит монтажное основание 16 и две стойки 17 треугольной формы. Крепление стоек 17 на монтажном основании 16 осуществляют за счет прочной фрикционной посадки штифтов, расположенных по нижней грани стоек 17, внутри гнезд монтажного основания 16. Треугольная форма пластиковых стоек 17 дает возможность при малом весе детали достигать ее достаточной жесткости. В верхней части стоек 17 расположены осевые подшипники 18, предназначенные для установки в них двух осей внешней поворотной кольцевой рамы 19 и размещенные под углом 180° относительно друг друга на внешней грани кольцевой рамы 19. Подшипники 18 предназначены для поворота внешней поворотной кольцевой рамы 19 относительно горизонтальной оси на стойках 17 на 360°. На внешней кольцевой раме 19 закреплены дополнительные осевые подшипники 20, закрепленные под 90° к осям на внутренней грани кольцевой рамы 19 и предназначенные для установки в них дополнительных осей, закрепленных на внутренней поворотной кольцевой раме 21 таким образом, чтобы кольцевая рама 21 могла вращаться в подшипниках 20 и, соответственно, относительно кольцевой рамы 19. Внутренняя кольцевая рама 21 также выполнена из легкого пластика и снабжена ребрами 22, расположенными под углом друг к другу и в одной плоскости с рамой 21 таким образом, что внешними концами они примыкают к внутренней грани рамы 21, а внутренними концами связаны с центральной площадкой 23. Центральная площадка 23 выполнена с центральным отверстием под опорный подшипник с элементами крепления и предназначена для установки с помощью элементов «узла рыскания» - подвижной опорной площадки (на фигуре не показано), снабженной отверстиями для установки в них ножек 6 квадрокоптера. После проверки плотности и прочности соединений всех разъемных деталей можно приступать к исследованиям.
Исследовательский модуль собирают следующим образом. Поскольку все детали хранятся в компактом сложенном виде, то вначале соединяют стойки 17 с монтажным основанием 16. Подготавливают «узел рыскания» - подвижную опорную площадку с отверстиями для крепления на ней квадрокоптера устанавливают на опорный подшипник центральной площадки 23 внутренней поворотной кольцевой рамы 21. Внутреннюю кольцевую раму 21 с установленной на ней подвижной опорной площадкой вывешивают на подшипники 20 рамы 19, которую, в свою очередь, вывешивают на подшипники 18 стоек 17.
Предпочтительно занятия по исследованию летательного аппарата начинать с балансировки квадрокоптера. Квадрокоптер имеет автономную систему управления, сигналом, поступающим на электронную плату 13 с пульта (на рисунке не показано) от оператора, можно включать моторы 8 поочередно, попарно и одновременно. Крен, который покажет внешняя рама 19, можно компенсировать небольшими грузилами (например, пластилином) и добиться идеальной балансировки квадрокоптера.
Далее можно начать отработку таких маневров квадрокоптера, как рыскание, тангаж и крен. Тангаж (наклон летательного аппарата вперед или назад) осуществляют путем увеличения скорости задних моторов 8 и уменьшения скорости передних (или наоборот). Этот маневр вызывает движение внутренней рамы 21. Крен (поворот квадрокоптера вокруг его продольной оси - оси, которая проходит от носа до хвоста) осуществляют изменением числа оборотов правых и левых моторов 8, в зависимости от того, в какую сторону нужно повернуть летательный аппарат. Этот маневр вызывает движение внешней рамы 19. Рыскание (поворот квадрокоптера вокруг своей оси влево или вправо) - это эффект возникновения моментов, когда одна пара моторов 8 начинает вращаться чуть быстрее другой пары. Этот маневр вызывает вращение подвижной опорной площадки узла «рыскания» вокруг опорного подшипника. На исследовательском модуле можно изучать и другие маневры квадрокоптера, например, такие, как взлет и посадка, набор высоты, зависание и другие.
Исследования квадрокоптера в свободном полете проводят после его отработки на модуле в полете «на привязи». Свободный полет можно осуществлять на открытом пространстве и в помещении. Поскольку квадрокоптер имеет облегченную конструкцию, а защитные пластиковые полудуги 2, расположенные с наружной стороны рамы 1, и дополнительные пластиковые полудуги 14, установленные под небольшим углом к плоскости рамы 1, полностью перекрывают доступ к винтам 9, то полеты в помещении не представляют опасности для окружающих.
После проведения всех исследований квадрокоптер и модуль разбирают и готовят к хранению в сложенном виде. Конструктивные особенности квадрокоптера позволяют оперативно и качественно проводить не только сборку, но и разборку устройства. К последующим занятиям квадрокоптер всегда доступен и работоспособен.
Учебный квадрокоптер предназначен для поставки в учебные заведения в виде набора-конструктора с инструкцией по сбору как самостоятельного устройства, так и вместе с исследовательским модулем: для проведения опытов и демонстраций со всеми необходимыми для этого деталями. Его использование в программе обучения дает возможность одновременного получения не только теоретических знаний, но и приобретения практических навыков в работе, связанной с конструированием БПЛА, их балансировкой, испытаниями и тонкостями управления.
Таким образом, технический результат, достигаемый с использованием заявленного изобретения, заключается в повышении доступности и наглядности деталей квадрокоптера с возможностью проведения многократной его сборки-разборки и безопасных испытаний, проведения различных демонстраций и изменения условий проведения опытов и экспериментов при визуализации получаемых результатов.
Учебный квадрокоптер содержит сборный корпус с плоской кольцеобразной рамой защитного типа, выполненного из верхнего и нижнего крестообразных оснований и плоской кольцевой рамы, связанных между собой посредством сборно-разборных креплений на втулках, выполненных с канавками под крепления, аккумулятор, установленный между крестообразными основаниями в их центральной части, электронную плату, размещенную на верхнем крестообразном основании. Обеспечивается повышение доступности и наглядности деталей квадрокоптера с возможностью проведения многократной его сборки-разборки и безопасных испытаний, проведение различных демонстраций и изменение условий проведения опытов и экспериментов при визуализации получаемых результатов. 2 з.п. ф-лы, 6 ил.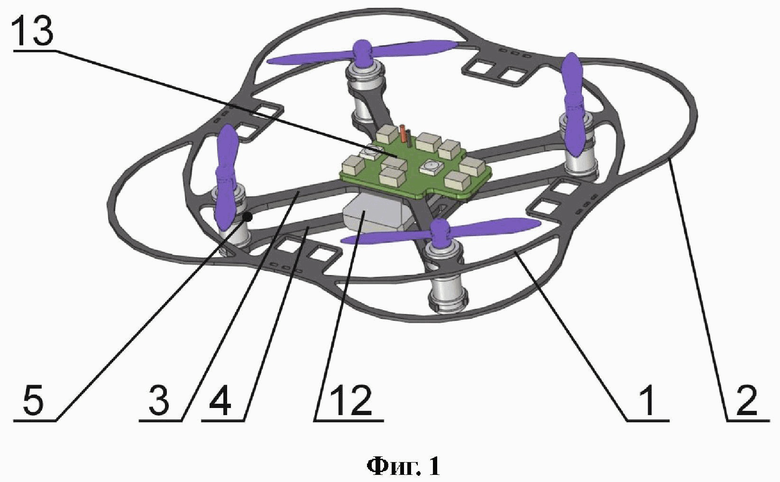
1. Учебный квадрокоптер, содержащий сборный корпус с плоской кольцеобразной рамой защитного типа, внутри которой расположены четыре мотора с втулками и винтами, аккумулятор и электронная плата, отличающийся тем, что корпус выполнен из верхнего и нижнего крестообразных оснований и плоской кольцевой рамы, связанных между собой посредством сборно-разборных креплений на втулках, выполненных с канавками под крепления, при этом кольцевая рама снабжена полудугами, расположенными на её внешней стороне в зоне размещения винтов, причём аккумулятор установлен между крестообразными основаниями в их центральной части, а электронная плата размещена на верхнем крестообразном основании.
2. Учебный квадрокоптер по п. 1, отличающийся тем, что плоская кольцевая рама снабжена дополнительными полудугами, установленными под небольшим углом к плоскости рамы.
3. Учебный квадрокоптер по п. 1, отличающийся тем, что нижнее крестообразное основание снабжено опорными цилиндрическими ножками.
| Обучающий программируемый квадрокоптер | 2023 |
|
RU2798299C1 |
| ЭЛЕКТРОДУГОВОЙ ПОДОГРЕВАТЕЛЬ ГАЗОИ | 0 |
|
SU203805A1 |
| CN 206849314 U, 05.01.2018 | |||
| CN 210244695 U, 03.04.2020 | |||
| CN 205952311 U, 15.02.2017. | |||
