Изобретение относится к области медицины, а именно к области исследования психофизиологических реакций человека, и может быть использовано в медицинских целях, функциональной диагностике и инженерной психологии.
В настоящее время известны способы проведения психофизиологических тестирований, касающиеся определения скорости и точности зрительно-моторного слежения, основанные на измерении времени задержки или упреждения реакции в виде нажатия клавиш манипулятора испытуемым на совпадение предъявляемого движущегося объекта с целью.
Известен способ отбора для занятий единоборствами [1], при котором испытуемому предъявляют на экране видеомонитора окружность, на которой помещена метка и точечный объект, движущийся по окружности. Испытуемый, наблюдая за движением точечного объекта, в момент предполагаемого совпадения его положения с меткой нажатием кнопки «Стоп» останавливает движение точечного объекта по окружности. Затем вычисляют ошибку несовпадения точечного объекта и метки - время ошибки запаздывания с положительным знаком или упреждения с отрицательным знаком, и через заданное время возобновляют движение точечного объекта по окружности. Испытуемый выполняет описанную процедуру заданное число раз, после чего строят вариационный ряд ошибок несовпадения точечного объекта и метки, вычисляют вариационный размах ряда и отмечают на числовой оси отрезок, ограниченный наибольшим и наименьшим членами вариационного ряда. Способ позволяет оценить быстроту и точность двигательных действий испытуемого, тем самым повысить достоверность отбора подростков для занятий единоборствами за счет инструментальных исследований.
Известен способ тестирования реакции человека на движущийся объект [2], при котором на горизонтальной поверхности световым излучателем, управляемым компьютером, создают световое пятно. Испытуемый размещается в центре пятна, программно в течение заданного времени меняют направление и скорость перемещения светового пятна. Испытуемый оценивает перемещения светового пятна и меняет свое положение таким образом, чтобы находиться в его центре, перемещения светового пятна и испытуемого снимают видеокамерой, расположенной на заданной высоте над горизонтальной поверхностью. Видеоизображение передают в компьютер, компьютер вычисляет положение центра светового пятна и центра места положения испытуемого, расстояние между центрами, среднеарифметическое значение вычисленных расстояний между центрами светового пятна и места положения испытуемого. По величине среднеарифметического значения судят о реакции человека на движущийся объект.
Известен способ определения способности к предвидению хода событий [3], при котором путем испытуемому на экране видеомонитора предъявляют окружность, на которой помещена метка и точечный объект. Точечный объект движется с заданной скоростью по окружности, за заданное время до достижения метки исчезает с экрана видеомонитора, при этом движение точечного объекта по окружности продолжается. В момент предполагаемого совпадения положения движущегося точечного объекта с меткой испытуемый нажатием кнопки «Стоп» останавливает движение точечного объекта по окружности и точечный объект снова появляется на экране видеомонитора в том месте, где было остановлено его движение. Затем вычисляют ошибку несовпадения точечного объекта и метки - время ошибки запаздывания с положительным знаком или упреждения с отрицательным знаком, и через заданное время возобновляют движение точечного объекта по окружности. Описанную процедуру повторяют заданное число раз, после чего вычисляют способность к прогнозированию положения движущегося объекта относительно метки Тпрог как среднеарифметическое значение по формуле:
где ti - i-я ошибка запаздывания с положительным знаком или упреждения с отрицательным знаком, мс; n - число остановок точечного объекта в области положения метки.
Известен способ определения времени реакции человека на движущийся по направлению от него объект [4], при котором испытуемому предъявляют на экране видеомонитора замкнутый контур, являющийся ограничивающим, внутри которого расположен тестовый объект аналогичной конфигурации. Тестовый объект увеличивают соответственно заданной скорости, имитируя движение его навстречу испытуемому. В момент предполагаемого совпадения размеров ограничивающего замкнутого контура и тестового объекта испытуемый нажатием кнопки «Стоп» останавливает увеличение диаметра тестового объекта. Затем вычисляют ошибку несовпадения диаметров тестового объекта и ограничивающего контура - время ошибки запаздывания с положительным знаком или упреждения - с отрицательным знаком, и через заданное время вновь предъявляют испытуемому замкнутый контур, внутри которого расположен тестовый объект начальных размеров и конфигурации. Затем вычисляют время реакции Тр человека на движущийся объект как среднеарифметическое значение по формуле:
где ti - i-я ошибка запаздывания с положительным знаком или упреждения с отрицательным знаком, мс; n - количество испытаний, при этом замкнутый контур одновременно с увеличением тестового объекта уменьшают в диаметре с заданной скоростью, затем уменьшение диаметра замкнутого контура останавливают нажатием кнопки «Стоп», а затем через заданное время предъявляют испытуемому замкнутый контур начального размера.
Недостатком известных способов являются их низкие технологические возможности, так как они позволяют измерять только время реакции на различные виды движущихся объектов и не позволяют измерять скорость и точность восприятия геометрических размеров объектов испытуемым и скорость и точность реализации моторных программ испытуемым, что и определяет эффективность зрительно-моторного слежения человеком.
Наиболее близким по технической сущности к предъявляемому способу является способ тестирования реакции человека на движущийся объект [5], при котором испытуемому предъявляют на экране видеомонитора прямую горизонтальную линию с меткой, расположенной в конце линии, и движущийся по линии точечный объект, который проходит путь от начала линии до метки за 1 с. В момент предполагаемого совпадения положения точечного объекта с меткой испытуемый нажатием кнопки «Стоп» останавливает движение точечного объекта. В момент нажатия кнопки «Стоп» вычисляют ошибку несовпадения положений точечного объекта и метки - время ошибки запаздывания, взятое с положительным знаком, или время ошибки упреждения, взятое с отрицательным знаком, и через 1 с возобновляют движение точечного объекта по линии. Описанную процедуру повторяют заданное число раз, после чего вычисляют среднеарифметическое значение ошибок запаздывания и среднеарифметическое значение ошибок упреждения. По сопоставлению рассчитанных среднеарифметических значений судят о взаимоотношении процессов возбуждения и торможения в коре головного мозга.
Недостатком данного способа является невозможность оценки скорости и точности реализации моторных программ испытуемым. Кроме того, способ предполагает оценку только скорости реакции человека на горизонтально движущийся объект, что может вносить дополнительные погрешности в оценку эффективности зрительно-моторного слежения человеком, поскольку точность зрительного анализатора испытуемого может быть различной по горизонтальной и вертикальной оси.
Технический результат предлагаемого решения заключается в расширении функциональных возможностей способа за счет определения времени и точности реализации программ моторного слежения человеком по горизонтальной и вертикальной осям.
Указанный технический результат достигается тем, что испытуемому в каждом из четырех квадрантов видеомонитора предъявляют объект, состоящий из прямых горизонтальных и вертикальных линий, в конце которых расположена метка в виде стрелки, и окружности, причем горизонтальная и вертикальная линии расположены по осям симметрии внутри окружности так, что начало горизонтальной и вертикальной линий находится в центре этой окружности, и получают информацию с двух двухосевых манипуляторов типа «джойстик» с рукоятями в начальном центральном положении, находящимися в левой и правой руке испытуемого,
причем новым является то, что длины прямых горизонтальных и вертикальных линий, предъявляемые в составе объектов верхних левого и верхнего правого квадрантов, выбираются случайно, длины прямых горизонтальной и вертикальной линий, предъявляемые в составе объектов нижнего левого квадранта, соответствуют величине отклонения рукояти левого джойстика соответственно по горизонтальной и вертикальной осям, длины прямых горизонтальной и вертикальной линий, предъявляемые в составе объектов нижнего правого квадранта, соответствуют величине отклонения рукояти правого джойстика соответственно по горизонтальной и вертикальной осям, а в момент предполагаемого равенства длин прямых горизонтальных линий и вертикальных линий, предъявляемых в составе объектов верхних квадрантов длинам соответствующих объектов нижнего квадранта, испытуемый нажимает кнопку манипулятора «Готов», после чего измеряют время, затраченное испытуемым с начала теста до нажатия кнопки «Готов», и разницу между длинами соответствующих прямых горизонтальных и вертикальных линий, расположенных в составе верхних левого и правого квадрантов, и длинами соответствующих прямых горизонтальных и вертикальных линий, расположенных в составе нижнего левого и правого квадрантов, после чего тест повторяют заданное количество раз и вычисляют время реализации моторного слежения Тмс по формуле:
где ti - время, затраченное на прохождение i-го испытания, с; n -количество испытаний,
точность реализации программы моторного слежения по горизонтальной оси для левой руки испытуемого Длг по формуле:

где Δ1i - ошибка позиционирования в горизонтальной оси для левой руки для i-го испытания, с; n - количество испытаний,
точность реализации программы моторного слежения по горизонтальной оси для правой руки испытуемого Дпг по формуле:
где Δ2i - ошибка позиционирования в горизонтальной оси для правой руки для i-го испытания, с; n - количество испытаний,
точность реализации программы моторного слежения по вертикальной оси для левой руки испытуемого Длв по формуле:
где Δ3i - ошибка позиционирования в вертикальной оси для левой руки для i-го испытания, с; n - количество испытаний,
точность реализации программы моторного слежения по вертикальной оси для правой руки испытуемого Двп по формуле:
где Δ4i - ошибка позиционирования в вертикальной оси для правой руки для i-го испытания, с; n - количество испытаний.
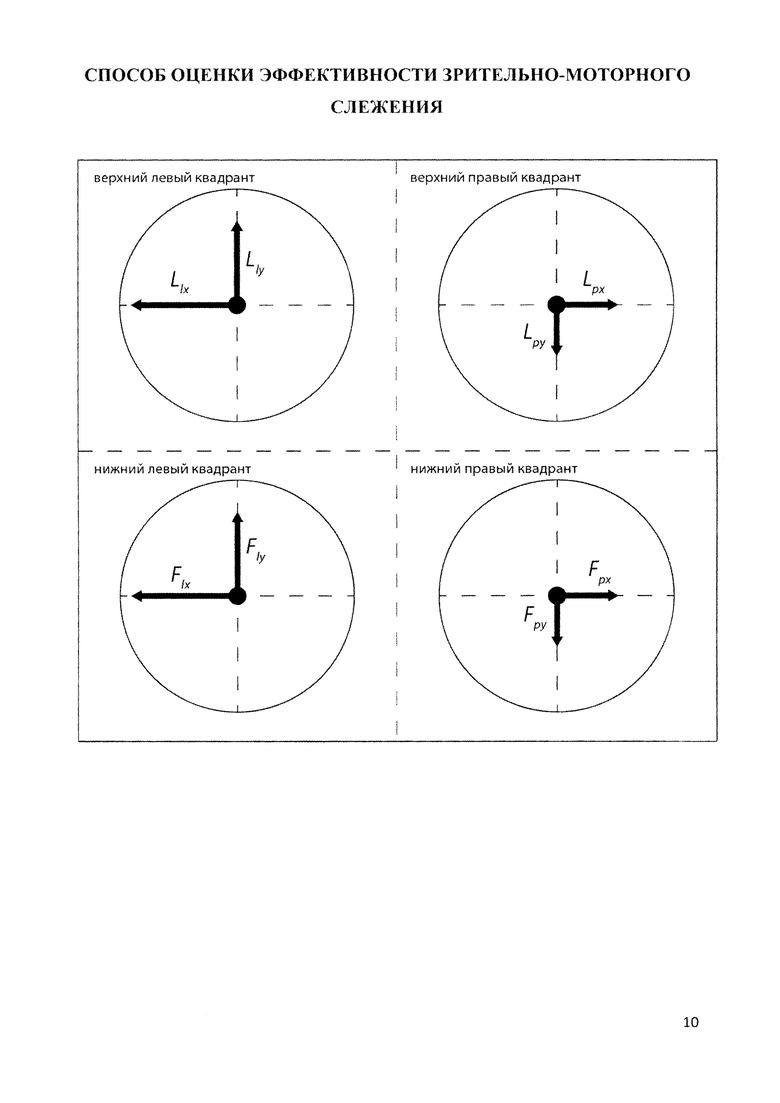
На фиг. 1 представлено изображение экрана видеомонитора испытуемого в момент нажатия кнопки «Готов».
Предлагаемый способ исследования зрительно-моторного слежения осуществляется следующим образом.
На первом этапе экран видеомонитора испытуемого разделяют на четыре квадранта, руки испытуемого располагаются на рукоятях двухосевых манипуляторов типа «джойстик» с рукоятями в начальном центральном положении.
На втором этапе в каждом из четырех квадрантов видеомонитора испытуемому предъявляют объект, состоящий из прямых горизонтальных и вертикальных линий, в конце которых расположена метка в виде стрелки, и окружности, причем горизонтальная и вертикальная линии расположены по осям симметрии внутри окружности так, что начало горизонтальной и вертикальной линий находится в центре этой окружности. Причем длины горизонтальных и вертикальных отрезков верхнего левого квадранта Llx и Lly и верхнего правого квадранта Lpx и Lpy выбираются случайным образом так, чтобы они находились внутри описанной окружности. Также автоматизировано фиксируют время начала тестирования.
На третьем этапе в режиме реального времени испытуемому отображают изменение размеров Flx, Fly, Fpx, Fpy отрезков, расположенных в нижнем левом и нижнем правом квадрантах, соответственно текущему отклонению рукоятей левого джойстика и правого джойстика от начального положения в режиме реального времени. Испытуемый при этом старается добиться максимально точного соответствия размеров соответствующих объектов в верхних и нижних квадрантах.
На четвертом этапе испытуемый нажимает кнопку манипулятора «Готов», после чего измеряют время, затраченное испытуемым с начала теста до нажатия кнопки «Готов», и разницу между длинами соответствующих прямых горизонтальных и вертикальных линий, расположенных в составе верхних левого и правого квадрантов, и длинами соответствующих прямых горизонтальных и вертикальных линий, расположенных в составе нижнего левого и правого квадрантов, после чего тест повторяют с первого этапа заданное количество раз.
Предлагаемый способ исследования зрительно-моторного слежения позволяет расширить функциональные возможности способа за счет определения времени и точности реализации программ моторного слежения человеком по горизонтальной и вертикальной осям.
Пример 1.
Испытуемый А., 23 года, при поступлении на курс обучения по программе переподготовки кадров по программе операторов лесозаготовительных машин (харвестеров) выполнил 10-кратное повторение теста со следующими результатами:
По времени реализации программы моторного слежения, в секундах: 3,2; 4,8; 4,3; 3,1; 3,8; 3,8; 3,3; 4,1; 4,4; 3,7.
Время реализации программы моторного слежения испытуемого, вычисленное по формуле, равно 3,85 секунд.
По точности реализации программы моторного слежения по горизонтальной оси для левой руки, в пунктах: 11; 5; 7; 9; 7; 8; 6; 9; 8; 10.
Точность реализации программы моторного слежения по горизонтальной оси для левой руки испытуемого, вычисленная по формуле, равна 8,0 пункта.
По точности реализации программы моторного слежения по горизонтальной оси для правой руки, в пунктах: 9; 7; 9; 8; 11; 8; 11; 8; 9; 7.
Точность реализации программы моторного слежения по горизонтальной оси для правой руки испытуемого, вычисленная по формуле, равна 8,7 пункта.
По точности реализации программы моторного слежения по вертикальной оси для левой руки, в пунктах: 16; 11; 9; 10; 11; 9; 10; 8; 9; 9.
Точность реализации программы моторного слежения по вертикальной оси для левой руки испытуемого, вычисленная по формуле, равна 10,2 пункта.
По точности реализации программы моторного слежения по вертикальной оси для правой руки, в пунктах: 9; 12; 11; 7; 10; 10; 8; 12; 9; 10.
Точность реализации программы моторного слежения по вертикальной оси для правой руки испытуемого, вычисленная по формуле, равна 9,8 пункта.
Литература
1. Патент №2540164 РФ, А61В 5/16. Способ отбора для занятий единоборствами // Мамаева А.В. (РФ), Закамский А.В. (РФ), Полевщиков М.М. (РФ), Роженцов В.В. (РФ). Заявка: 2013148546/14, 30.10.2013, опубл. 10.02.2015, Бюл. №4.
2. Патент №2508050 РФ, А61В 5/16. Способ тестирования реакции человека на движущийся объект // Роженцов В.В. (РФ), Афоньшин В.Е. (РФ). Заявка: 2012148834/14, 16.11.2012, опубл. 27.02.2014, Бюл. №6.
3. Патент №2381742 РФ, А61В 5/16. Способ определения способности к предвидению хода событий // Петухов И.В. (РФ). Заявка: 2008146586/14, 25.11.2008, опубл. 20.02.2010, Бюл. №5.
4. Патент №2497452 РФ, А61В 5/16. Способ определения времени реакции человека на движущийся по направлению от него объект // Курасов П.А. (РФ), Петухов И.В. (РФ). Заявка: 2012104099/14, 06.02.2012, опубл. 20.08.2013, Бюл. №23.
5. Патент №2386395 РФ, А61В 5/16. Способ определения времени реакции человека на движущийся объект // Лежнина Т.А. (РФ), Роженцов В.В. (РФ). Заявка: 2008115066/14, 16.04.2008, опубл. 27.10.2009, Бюл. №30.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки точности управления технологическим оборудованием с механическим и гидравлическим приводом | 2018 |
|
RU2690738C1 |
| Способ оценки точности трехкоординатного управления | 2018 |
|
RU2685988C1 |
| Способ оценки динамики развития эффективности зрительно-моторных реакций | 2018 |
|
RU2690596C1 |
| Способ подготовки операторов транспортеров-погрузчиков | 2019 |
|
RU2725226C1 |
| Способ подготовки операторов форвардера | 2022 |
|
RU2805804C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АСИММЕТРИИ ЗРИТЕЛЬНОГО ВОСПРИЯТИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2016 |
|
RU2635170C1 |
| Способ оценки асимметрии компонентов когнитивно-моторной функции человека | 2020 |
|
RU2760948C1 |
| Способ оценки асимметрии компонентов когнитивно-моторной функции человека-оператора | 2023 |
|
RU2820385C1 |
| Способ оценки точности и стабильности двигательных действий спортсмена игровых видов спорта | 2016 |
|
RU2620921C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЙТИНГА СПОРТСМЕНА ИГРОВЫХ ВИДОВ СПОРТА | 2013 |
|
RU2548318C2 |
Изобретение относится к области медицины, а именно к области исследования психофизиологических реакций человека, и может быть использовано в медицинских целях, функциональной диагностике и инженерной психологии. Испытуемому в каждом из четырех квадрантов видеомонитора предъявляют объект, состоящий из прямых горизонтальных и вертикальных линий, в конце которых расположена метка в виде стрелки, и окружности. Причем горизонтальная и вертикальная линии расположены по осям симметрии внутри окружности так, что начало горизонтальной и вертикальной линий находится в центре этой окружности. Получают информацию с двух двухосевых манипуляторов типа «джойстик» с рукоятями в начальном центральном положении, находящимися в левой и правой руке испытуемого. При этом длины прямых горизонтальных и вертикальных линий, предъявляемые в составе объектов верхних левого и верхнего правого квадрантов, выбираются случайно. Длины прямых горизонтальной и вертикальной линий, предъявляемые в составе объектов нижнего левого квадранта, соответствуют величине отклонения рукояти левого джойстика соответственно по горизонтальной и вертикальной осям. Длины прямых горизонтальной и вертикальной линий, предъявляемые в составе объектов нижнего правого квадранта, соответствуют величине отклонения рукояти правого джойстика соответственно по горизонтальной и вертикальной осям. В момент предполагаемого равенства длин прямых горизонтальных линий и вертикальных линий, предъявляемых в составе объектов верхних квадрантов длинам соответствующих объектов нижнего квадранта, испытуемый нажимает кнопку манипулятора «Готов». После чего измеряют время, затраченное испытуемым с начала теста до нажатия кнопки «Готов», и разницу между длинами соответствующих прямых горизонтальных и вертикальных линий, расположенных в составе верхних левого и правого квадрантов, и длинами соответствующих прямых горизонтальных и вертикальных линий, расположенных в составе нижнего левого и правого квадрантов. После чего тест повторяют заданное количество раз и вычисляют время реализации моторного слежения по математической формуле. Способ позволяет расширить функциональные возможности способов определения скорости реакции человека на движущиеся объекты за счет определения времени и точности реализации программ моторного слежения человеком по горизонтальной и вертикальной осям. 1 ил., 1 пр.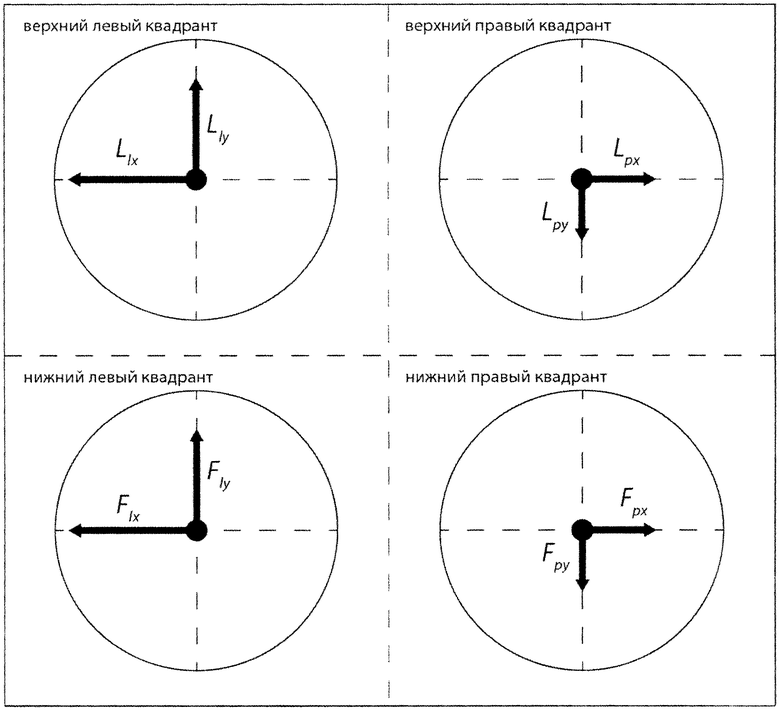
Способ исследования зрительно-моторного слежения путем предъявления испытуемому в каждом из четырех квадрантов видеомонитора объектов, состоящих из прямых горизонтальных и вертикальных линий, в конце которых расположена метка в виде стрелки, и окружности, причем горизонтальная и вертикальная линии расположены по осям симметрии внутри окружности так, что начало горизонтальной и вертикальной линий находится в центре этой окружности, и получают информацию с двух двухосевых манипуляторов типа «джойстик» с рукоятями в начальном центральном положении, находящимися в левой и правой руке испытуемого,
отличающийся тем, что длины прямых горизонтальных и вертикальных линий, предъявляемые в составе объектов верхних левого и верхнего правого квадрантов, выбираются случайно, длины прямых горизонтальной и вертикальной линий, предъявляемые в составе объектов нижнего левого квадранта, соответствуют величине отклонения рукояти левого джойстика соответственно по горизонтальной и вертикальной осям, длины прямых горизонтальной и вертикальной линий, предъявляемые в составе объектов нижнего правого квадранта, соответствуют величине отклонения рукояти правого джойстика соответственно по горизонтальной и вертикальной осям, а в момент предполагаемого равенства длин прямых горизонтальных линий и вертикальных линий, предъявляемых в составе объектов верхних квадрантов длинам соответствующих объектов нижнего квадранта, испытуемый нажимает кнопку манипулятора «Готов», после чего измеряют время, затраченное испытуемым с начала теста до нажатия кнопки «Готов», и разницу между длинами соответствующих прямых горизонтальных и вертикальных линий, расположенных в составе верхних левого и правого квадрантов, и длинами соответствующих прямых горизонтальных и вертикальных линий, расположенных в составе нижнего левого и правого квадрантов, после чего тест повторяют заданное количество раз и вычисляют время реализации моторного слежения Тмс по формуле:
где ti - время, затраченное на прохождение i-го испытания, с; n -количество испытаний,
точность реализации программы моторного слежения по горизонтальной оси для левой руки испытуемого Длг по формуле:
где Δ1i - ошибка позиционирования в горизонтальной оси для левой руки для i-го испытания, с; n - количество испытаний,
точность реализации программы моторного слежения по горизонтальной оси для правой руки испытуемого Дпг по формуле:
где Δ2i - ошибка позиционирования в горизонтальной оси для правой руки для i-го испытания, с; n - количество испытаний,
точность реализации программы моторного слежения по вертикальной оси для левой руки испытуемого Длв по формуле:
где Δ3i - ошибка позиционирования в вертикальной оси для левой руки для i-го испытания, с; n - количество испытаний,
точность реализации программы моторного слежения по вертикальной оси для правой руки испытуемого Двп по формуле:
где Δ4i - ошибка позиционирования в вертикальной оси для правой руки для i-го испытания, с; n - количество испытаний.
| СПОСОБ ТЕСТИРОВАНИЯ РЕАКЦИИ ЧЕЛОВЕКА НА ДВИЖУЩИЙСЯ ОБЪЕКТ | 2008 |
|
RU2386395C2 |
| СПОСОБ ОЦЕНКИ РЕАКЦИИ СПОРТСМЕНА НА ДВИЖУЩИЙСЯ ОБЪЕКТ | 2016 |
|
RU2623995C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ОЦЕНКИ ПСИХОФИЗИОЛОГИЧЕСКОЙ СОВМЕСТИМОСТИ ЧЛЕНОВ ГРУППЫ ПО ГОМЕОСТАТИЧЕСКОЙ МЕТОДИКЕ | 2015 |
|
RU2603617C1 |
| ПЕТУХОВ И | |||
| В | |||
| Методы и устройства в психофизиологических исследованиях человека, Йошкар-Ола, 2005, С | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |

