Изобретение относится к области моделирующих устройств, которые следует рассматривать как учебные или тренировочные устройства, вызывающие у обучающихся ощущения, идентичные ощущениям, возникающим при обращении с реальными устройствами, отличающиеся обеспечением записи или измерения характеристик обучаемого.
Форвардер (транспортер-погрузчик) является погрузочным и транспортным средством, относящимся к категории трелевочных тракторов, используемым для лесозаготовительных работ.
В настоящее время известны способы проведения психофизиологических исследований, направленные на измерение скорости и точности зрительно-моторного слежения человеком, основанные на демонстрации испытуемому динамических виртуальных мишеней и измерении времени задержки и упреждения реакции в виде нажатий испытуемым клавиш манипулятора при совпадении динамической мишени и цели.
Так, известен способ обучения навыкам движения и устройство для его реализации [1]. Способ применяется в медицине и основан на принуждении обучающего к многократному повторению обучаемым больным заданных циклов движений по меньшей мере одной частью тела, обучаемого механически принуждают повторять по меньшей мере одной частью тела циклы естественных движений здорового человека, передаваемых через механическую связь от той же части тела обучающего здорового человека.
Недостатками данного способа обучения является то, что в процессе обучения непосредственно задействован сам обучающий/оператор, который занят на протяжении всего времени обучения.
Известен способ оценки зрительно-моторной реакции на движение объекта в пространстве [2], при котором испытуемый визуально наблюдает движущийся объект и реагирует на прохождение объекта через «финишный створ» нажатием на кнопку, причем в качестве объекта наблюдения используют движущийся по желобу металлический шарик, проходящий последовательно через два индукционных датчика, первый - запускающий электросекундомер и второй, расположенный на уровне «финишного створа», останавливающий секундомер в момент его прохождения, устанавливая стандартное время прохождения шариком расстояния между двумя датчиками, затем второй индукционный датчик отключают, а испытуемый останавливает секундомер в момент визуального прохождения шариком «финишного створа», нажимая на кнопку.
Известен способ определения способности к предвидению хода событий [3], при котором путем испытуемому на экране видеомонитора предъявляют окружность, на которой помещена метка и точечный объект. Точечный объект движется с заданной скоростью по окружности, за заданное время до достижения метки исчезает с экрана видеомонитора, при этом движение точечного объекта по окружности продолжается. В момент предполагаемого совпадения положения движущегося точечного объекта с метким испытуемым нажатием кнопки «Стоп» останавливает движение точечного объекта по окружности и точечный объект снова появляется на экране видеомонитора, в том месте, где было остановлено его движение. Затем вычисляют ошибку несовпадения точечного объекта и метки - время ошибки запаздывания с положительным знаком или упреждения с отрицательным знаком, и через заданное время возобновляют движение точечного объекта по окружности. Описанную процедуру повторяют заданное число раз, после чего вычисляют способность к прогнозированию положения движущегося объекта относительно метки Тпр0Г как среднеарифметическое значение по формуле:
где ti - i-я ошибка запаздывания с положительным знаком или упреждения с отрицательным знаком, мс; n - число остановок точечного объекта в области положения метки.
Недостатком известных способов являются их низкие технологические возможности, поскольку они позволяют в полной мере оценить лишь точность зрительно-моторного слежения за объектом, что, применительно к транспортерам-погрузчикам, наиболее важно при перемещении рабочего органа (манипулятора).
Однако, в процессе человеческой деятельности (в том числе, производственной деятельности) выполняются более сложные психомоторные реакции и решаются более сложные конитивные задачи, связанные с определением местонахождения объекта и совершением целенаправленной двигательной реакции.
Наиболее близким по технической сущности к предъявляемому способу является способ подготовки операторов транспортеров-погрузчиков [4], при котором испытуемому на экране видеомонитора предъявляют зрительный стимул - отрезок произвольной длины, расположенный горизонтально, предъявляемый в произвольном месте экрана видеомонитора, а также управляемый объект в виде красного шара диаметром 20 мм. с отмеченным центром, движением, которого управляет испытуемый с помощью двухосевого манипулятора типа «джойстик» с рукоятью в начальном центральном положении и совмещает центры зрительного стимула и управляемого объекта, при этом считают, что центр отрезка соответствует центру тяжести данного зрительного объекта, а в момент предполагаемого совмещения испытуемый нажимает кнопку манипулятора «Готов», после чего измеряют время с момента появления зрительного стимула до нажатия кнопки «Готов» и ошибку наведения прицела, равную расстоянию между центрами зрительного стимула и прицела в момент нажатия кнопки «Готов», после чего тест повторяют заданное количество раз, в каждом испытании длина зрительного стимула и его местоположение на экране меняют произвольным образом, вычисляют:
- время реализации моторного слежения Тмс по формуле:
где t1 - время, затраченное на прохождение г-го испытания, с; n - количество испытаний,
- точность определения центра тяжести груза Емс вычисляют по формуле:
где ei - ошибка наведения прицела в i-м испытании, пункты; n - количество испытаний.
Недостатком известного способа является его несоответствие реальному физическому объекту, что приводит к искажению оценки когнитивных способностей испытуемого.
Современный процесс обучения на тренажерах опирается на понятие когнитивной образовательной технологии связанной, в свою очередь, с целенаправленным управлением когнитивными функциями обучаемого оператора - высшими мозговыми функциями, такими как память, внимание, психомоторная координация, речь, счет, мышление, ориентация, планирование и контроль высшей психической деятельности [5, 6]. Когнитивные функции характеризуют способность человека к восприятию и переработке информации, а также к использованию ее для коррекции своих действий [7].
Одной из типичных когнитивных задач, решаемых оператором транспортеров-погрузчиков является определение центра тяжести груза. Определение центра тяжести груза, согласно технологической рабочей карте ответственного за безопасное производство работ с применением кранов операторами транспортеров-погрузчиков, кранов и других подъемных механизмов, является обязательным этапом работы [8].
В известном способе центр объекта считается центром его тяжести, что справедливо для линейных объектов, а определение центра тяжести связано, прежде всего, с глазомером испытуемого, так как испытуемый решает задачу разделения отрезка на две равные части.
При этом реальные грузы далеко не всегда можно свести к линейному объекту в виде отрезка прямой. В этом случае, испытуемый должен решать когнитивную задачу гораздо большей сложности, требующей помимо глазомера еще и технического интеллекта.
Технический результат предлагаемого решения заключается в расширении функциональных возможностей известных способов за счет добавления когнитивной компоненты в виде определения центра тяжести объекта двумерных объектов.
Указанный технический результат достигается тем, что испытуемому на экране видеомонитора предъявляют зрительный стимул в произвольном месте экрана видеомонитора, а также управляемый объект в виде красного шара диаметром 20 мм. с отмеченным центром, движением, которого управляет испытуемый с помощью двухосевого манипулятора типа «джойстик» с рукоятью в начальном центральном положении и совмещает центр управляемого объекта с предполагаемым центром тяжести зрительного стимула, а в момент предполагаемого совмещения испытуемый нажимает кнопку манипулятора «Готов», после чего измеряют время с момента появления зрительного стимула до нажатия кнопки «Готов» и ошибку наведения прицела, равную расстоянию между центрами зрительного стимула и прицела в момент нажатия кнопки «Готов», после чего тест повторяют заданное количество раз, в каждом испытании местоположение зрительного стимула на экране меняют произвольным образом, вычисляют:
- время реализации моторного слежения Тмс по формуле:
где ti - время, затраченное на прохождение г-го испытания, с; n - количество испытаний;
- точность определения центра тяжести груза Емс вычисляют по формуле:
где ei - ошибка наведения прицела в i-м испытании, пункты; n - количество испытаний,
причем новым является то, что зрительный стимул представляет собой двумерную фигуру - многоугольник, произвольной формы предъявляемый в произвольном месте экрана видеомонитора, в каждом испытании форму зрительного стимула меняют произвольным образом.
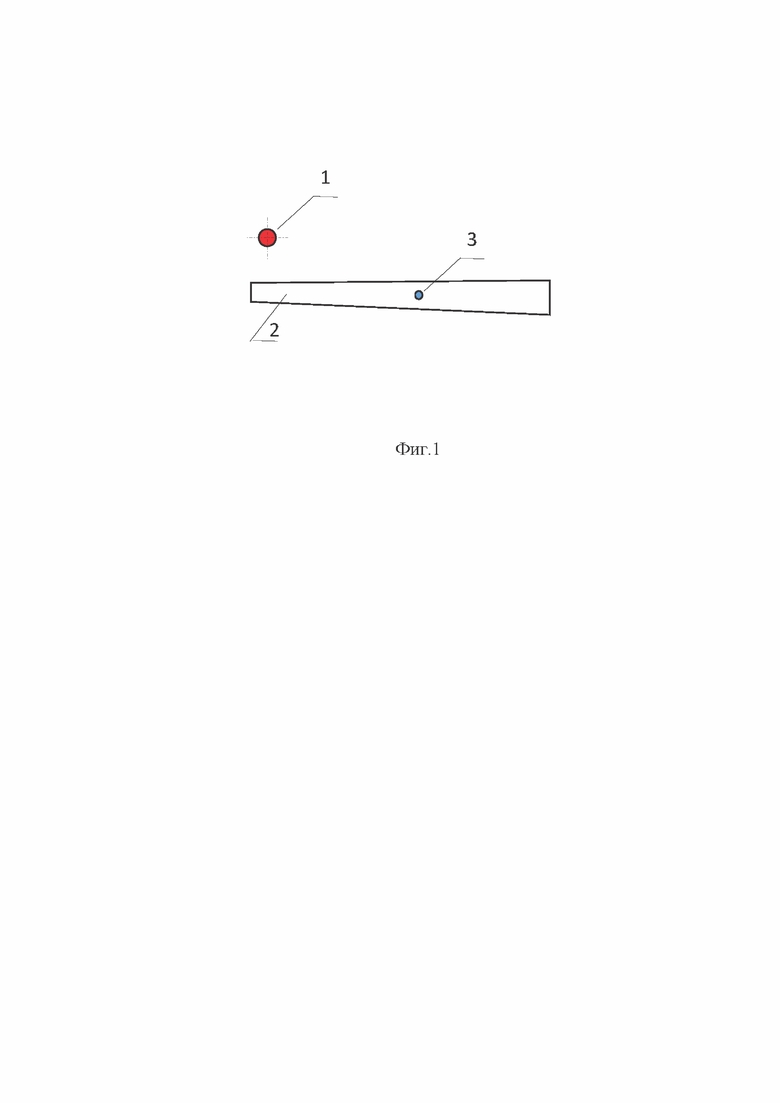
На фиг. 1 представлена схема зрительного стимула, предъявляемая испытуемому.
Предлагаемый способ подготовки операторов форвардеров осуществляется следующим образом.
Обучающегося усаживают на обучающий тренажер включающий монитор и двухосевой манипулятор типа «джойстик» с рукоятью в начальном центральном положении.
В центре экрана видеомонитора отображают управляемый объект (1) в виде красного шара диаметром 20 мм с отмеченным центром, являющимся прицелом манипулятора.
Затем, на экране монитора, в произвольном месте в горизонтальной плоскости обучаемому предъявляют зрительный стимул (2) - двумерную фигуру в виде многоугольника произвольной формы.
Данный многоугольник может быть представлен, например, в виде трапеции, вытянутой относительно горизонтальной плоскости, что моделирует бревно.
В этом случае естественная сбежистость хлыста приводит к тому, что центр тяжести объекта будет находится не по середине его линейной длинны, а будет смещен к комельной части.
В этих условиях, оператор форвардера визуально определяя центр тяжести (3) может обеспечить более щадящий режим эксплуатации технологического оборудования за счет снижения нагрузки на части гидроманипулятора, и избежать переламывания или выскальзывания сортимента в процессе погрузки.
Обучающийся в течении максимально возможного короткого времени совмещает управляемый объект (1) (прицел манипулятора) с предполагаемой точкой - центром тяжести (3), зрительного стимула (2) управляя перемещением управляемого объекта посредством манипулятора, и нажимает кнопку «Готов».
Измеряют время с момента появления зрительного стимула до нажатия кнопки «Готов» и ошибку наведения прицела, равную расстоянию между точкой центра тяжести зрительного стимула и прицела в момент нажатия кнопки «Готов».
После этого тест повторяют заданное количество раз.
В каждом испытании форму зрительного стимула и его местоположение на экране меняют произвольным образом.
Вычисляют:
- время реализации моторного слежения Тмс по формуле:
где ti - время, затраченное на прохождение г-го испытания, с; n - количество испытаний,
- точность определения центра тяжести груза Емс по формуле:
где ei - ошибка наведения прицела в i-м испытании, пункты; По окончании цикла управления, обучающегося информируют об эффективности его действий путем предъявления ему:
- времени реализации моторного слежения Тмс;
- точности определения центра тяжести груза Емс.
Многократное повторение операторских действий по реализации задачи управления позволяет оператору развить свой профессиональный навык.
Предлагаемый способ подготовки операторов форвардера позволяет расширить функциональные возможности способа за счет добавления когнитивной компоненты в виде определения центра тяжести двумерного объекта.
Литература:
1. Патент №96120010, МПК6 А61Н 3/00. Способ обучения навыкам движения и устройство для его реализации // Певченков В.В. Опубл. 10.05.1998.
2. Патент №2525638 РФ А61В 5/16. Способ оценки зрительно-моторной реакции на движение объекта в пространстве // Левашов О.В. (РФ), Павлов С.Ф. (РФ). Заявка 2013124413/14, 28.05.2013 Опубл. 20.08.2014, Бюл. №23.
3. Патент №2381742 РФ А61В 5/16. Способ определения способности к предвидению хода событий // Петухов И.В. (РФ). Заявка: 2008146586/14, 25.11.2008 Опубл. 20.02.2010, Бюл. №5.
4. Патент №2725226 РФ. Способ подготовки операторов транспортеров-погрузчиков // Стешина Л.А. Петухов И.В. (РФ). Заявка: 2019144292, 27.12.2019. Опубл. 0.06.2020 Бюл. №19.
5. Бершадский, М.Е. Когнитивная технология обучения: теория и практика применения /Серия: Библиотека журнала «Директор школы», Директор+, Эксперт, Издатель: Издательская фирма «Сентябрь», Москва, 2011. 256 с.
6. Привалов А.Н. Моделирование когнитивного процесса тренинга в эргатических системах [Текст] / Е.В. Ларкин, А.Н. Ивутин, А.Н. Привалов. LAP LAMBERT Academic Publishing 2013. 232 с.
7. Акименко Т. А. Основы моделирования и управления когнитивным процессом // Известия Тульского государственного университета. Технические науки. - 2013. - №. 9-1.
8. ГОСТ 33711.1-2016. Краны грузоподъемные. Обучение персонала, 2016.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ подготовки операторов транспортеров-погрузчиков | 2019 |
|
RU2725226C1 |
| Способ оценки точности трехкоординатного управления | 2018 |
|
RU2685988C1 |
| Способ оценки динамики развития эффективности зрительно-моторных реакций | 2018 |
|
RU2690596C1 |
| Способ оценки точности управления технологическим оборудованием с механическим и гидравлическим приводом | 2018 |
|
RU2690738C1 |
| Способ исследования зрительно-моторного слежения | 2017 |
|
RU2663077C1 |
| Способ определения времени реакции человека на движущиеся объекты | 2018 |
|
RU2686049C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЙТИНГА СПОРТСМЕНА ИГРОВЫХ ВИДОВ СПОРТА | 2011 |
|
RU2457784C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЙТИНГА СПОРТСМЕНА ИГРОВЫХ ВИДОВ СПОРТА | 2013 |
|
RU2548318C2 |
| СПОСОБ ОЦЕНКИ УРОВНЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ ЧЕЛОВЕКА НА ОСНОВЕ ИЗМЕРЕНИЯ ВРЕМЕНИ ОРИЕНТИРОВОЧНОЙ ЗРИТЕЛЬНО-МОТОРНОЙ РЕАКЦИИ ЧЕЛОВЕКА | 2014 |
|
RU2573340C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЙТИНГА СПОРТСМЕНОВ-ЕДИНОБОРЦЕВ | 2013 |
|
RU2534855C1 |
Изобретение относится к учебным моделям или тренажерам для обучения управлению транспортными средствами. Предъявляют испытуемому на экране видеомонитора зрительный стимул в виде двумерной фигуры – многоугольника и управляемый объект в виде красного шара диаметром 20 мм с отмеченным центром. Движением управляемого объекта управляет испытуемый с помощью двухосевого манипулятора типа «джойстик» с рукоятью в начальном центральном положении. Испытуемый совмещает центр управляемого объекта с предполагаемым центром тяжести зрительного стимула. В момент предполагаемого совмещения испытуемый нажимает кнопку манипулятора «Готов». После чего измеряют время с момента появления зрительного стимула до нажатия кнопки «Готов» и ошибку наведения прицела, равную расстоянию между центрами зрительного стимула, и прицела в момент нажатия кнопки «Готов». Тест повторяют заданное количество раз, причем в каждом испытании форму и местоположение зрительного стимула на экране меняют. Вычисляют время реализации моторного слежения и точность определения центра тяжести груза по заявленным формулам. Способ обеспечивает подготовку операторов форвардеров, позволяет расширить функциональные возможности известных способов за счет добавления когнитивной компоненты в виде определения центра тяжести объекта. 1 ил., 1 пр.
Способ подготовки операторов форвардера, включающий предъявление испытуемому на экране видеомонитора зрительного стимула в виде двумерной фигуры - многоугольника, а также управляемый объект в виде красного шара диаметром 20 мм с отмеченным центром, движением которого управляет испытуемый с помощью двухосевого манипулятора типа «джойстик» с рукоятью в начальном центральном положении и совмещает центр управляемого объекта с предполагаемым центром тяжести зрительного стимула, а в момент предполагаемого совмещения испытуемый нажимает кнопку манипулятора «Готов», после чего измеряют время с момента появления зрительного стимула до нажатия кнопки «Готов» и ошибку наведения прицела, равную расстоянию между центрами зрительного стимула, и прицела в момент нажатия кнопки «Готов», после чего тест повторяют заданное количество раз, причем в каждом испытании форму и местоположение зрительного стимула на экране меняют произвольным образом, вычисляют:
- время реализации моторного слежения Тмс по формуле
 ,
,
где ti - время, затраченное на прохождение i-го испытания, с; n - количество испытаний;
- точность определения центра тяжести груза Емс вычисляют по формуле
 ,
,
где еi - ошибка наведения прицела в i-м испытании, пункты; n - количество испытаний.
| Способ подготовки операторов транспортеров-погрузчиков | 2019 |
|
RU2725226C1 |
| RU 2016120391 A, 30.11.2017 | |||
| Тренажер водителя погрузчика | 1984 |
|
SU1163344A1 |
| Устройство для обучения операторов грузоподъемных машин | 1978 |
|
SU769602A1 |
| КУРАСОВ П.А | |||
| Обоснование параметров и режимов работы учебных тренажеров лесозаготовительных машин | |||
| Дисс | |||
| на соиск | |||
| уч | |||
| ст | |||
| к.т.н | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

