ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству, способу и системе получения дыхательной информации пациента.
УРОВЕНЬ ТЕХНИКИ
Основные показатели состояния организма человека, например, частота сердечных сокращений (HR) или дыхательная информация, такие как частота дыхания (RR), могут служить мощным средством прогнозирования серьезных медицинских проблем. По этой причине частота дыхания часто оперативно контролируется в отделениях интенсивной терапии или при ежедневных выборочных проверках в общей палате больницы. Частота дыхания является одним из самых важных основных показателей состояния организма, но ее все еще трудно измерять без физического контакта с телом. В существующих отделениях интенсивной терапии плетизмография импеданса грудной клетки или респираторная индуктивная плетизмография являются все еще предпочтительными способами, при которых обычно используются две дыхательные полоски, чтобы различать тораксное и брюшное движение при дыхании человека. Однако эти способы неудобны и неприятны для наблюдаемого пациента.
Недавно был разработан мониторинг дыхательного сигнала на основе видеокамеры. При этой технологии человеческое дыхание может контролироваться незаметно на расстоянии с помощью видеокамеры, что дает преимущества перед традиционными решениями на основе датчиков, прикрепленных на теле (например, ECG или эластичные полоски). Бесконтактное измерение осуществляется посредством анализа видеосъемки области грудной клетки пациента (или живота) для измерения периодического движения дыхания.
Документ WO 2012/140531 A1 раскрывает устройство обнаружения дыхательного движения для обнаружения дыхательного движения человека. Это устройство обнаружения обнаруживает электромагнитное излучение, излучаемое и/или отражаемое человеком, причем это электромагнитное излучение содержит непрерывный или дискретный сигнал, характерный для движения, связанный с частотой дыхания человека и другими артефактами движения, связанными с перемещениями человека или с окружающей средой. Это устройство повышает надежность измерения частоты дыхания за счет наличия средства обработки данных, выполненного с возможностью отделения сигнала частоты дыхания от общих возмущений с учетом заданной полосы частот, общего заданного направления или ожидаемой амплитудной характеристики и/или амплитудного профиля для различения различных сигналов.
Такие неинвазивные измерения частоты дыхания могут осуществляться оптически, используя стационарную видеокамеру. Видеокамера получает связанные с дыханием движения грудной клетки пациента в виде потока изображений. Дыхательные движения приводят к временной модуляции некоторых признаков изображения, причем частота модуляции соответствует частоте дыхания контролируемого пациента. Примерами таких признаков изображения являются средняя амплитуда в интересующей области пространства, расположенной вокруг грудной клетки пациента, или местоположение максимума пространственной взаимной корреляции интересующей области в последовательных изображениях. На качество и надежность полученной информации об основных показателях состояния организма в значительной степени влияет качество данных входного изображения, определяемое соответствующим выбором контрастности изображения и выбранной интересующей областью.
Поскольку мониторинг дыхания на основе камеры основан на обнаружении тонкого движения дыхания в области грудной клетки/живота и чувствителен к движению пациента, не связанному с дыханием, любое движение, не связанное с дыханием, наблюдаемое в области грудной клетки/живота, может вносить ошибки измерения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в обеспечении устройства, способа и системы получения дыхательной информации пациента с более высокой точностью и надежностью, в частности, в отношении движения пациента, не связанного с дыханием.
В первом варианте настоящего изобретения представляется устройство получения дыхательной информации пациента, содержащее
- блок вычисления сигнала движения для вычисления множества М сигналов движения для множества пикселей и/или групп пикселей, по меньшей мере, в интересующей области для множества N кадров изображения пациента,
- блок преобразования для вычисления некоторых или всех сигналов движения, многочисленных исходных сигналов, характеризующих независимые движения внутри упомянутых изображений, применяя преобразование к соответствующим сигналам движения, чтобы получать исходные сигналы, характеризующие независимые движения внутри упомянутых кадров изображения, и
- блок выбора для выбора исходного сигнала из упомянутых вычисленных исходных сигналов, характеризующих дыхание упомянутого пациента, исследуя одно или более свойств упомянутых исходных сигналов для некоторых или всех упомянутых вычисленных исходных сигналов.
В дополнительных вариантах настоящего изобретения представлены соответствующий способ, а также система получения дыхательной информации пациента, причем упомянутая система содержит блок формирования изображений для получения N кадров изображения пациента, и раскрытое здесь устройство для получения дыхательной информации пациента, используя упомянутые полученные N кадров изображения пациента.
В других дополнительных вариантах настоящего изобретения обеспечиваются компьютерная программа, содержащая программное кодовое средство, побуждающее компьютер выполнять этапы способа обработки, когда упомянутая компьютерная программа выполняется на компьютере, а также непередаваемый считываемый компьютером носитель, на котором хранится компьютерный программный продукт, который, когда исполняется процессором, побуждает выполнять раскрытый здесь способ.
Предпочтительные варианты изобретения определяются в зависимых пунктах формулы изобретения. Следует понимать, что заявленные способ, система, компьютерная программа и носитель имеют схожие и/или идентичные предпочтительные варианты осуществления, такие, которые заявлены для устройства и которые определены в зависимых пунктах формулы изобретения.
Настоящее изобретение основано на идее определения дыхательной информации, в частности частоты дыхания, исходя из множества изображений (например, видеопоток или последовательность изображений, полученных камерой) посредством нескольких этапов обработки. Во-первых, сигналы движения, например, в форме векторного поля движения, являются пиксельными и/или блочными (то есть для локальных областей), вычисленными для некоторых или всех изображений, по меньшей мере, в пределах интересующей области (например, области грудной клетки или живота пациента). К упомянутым сигналам движения применяется преобразование, например, слепое разделение сигналов (также называемое слепое разделение источников), чтобы получить набор отделенных исходных сигналов, характеризующих независимые движения в пределах упомянутых изображений. Наконец, из упомянутых отделенных исходных сигналов исходный сигнал, характеризующий дыхание, выбирается, исследуя одно или более свойств упомянутых исходных сигналов, например, основываясь на корреляции отделенных исходных сигналов с первоначальными сигналами движения и/или на частотной информации для отделенных исходных сигналов. Таким образом, движение, не связанное с дыханием, может быть исключено и получена более достоверная и точная информация о дыхании, например, незаметно контролируя новорожденного, который часто совершает движения, не связанные с дыханием.
В предпочтительном варианте осуществления упомянутый блок преобразования выполнен с возможностью вычисления для P из упомянутых М сигналов движения, Q исходных сигналов, характеризующих независимые движения внутри упомянутых изображений, где 2 ≤ P ≤ М и 2 ≤ Q ≤ P, применяя преобразование к соответствующим Р сигналам движения, чтобы получить упомянутые Q исходных сигналов, характеризующих независимые движения внутри упомянутых N кадров изображения. Таким образом, в целом, возможно, что вычисляется меньше (Q) исходных сигналов, чем Р сигналов движения. В частности, при анализе основных компонент, выполняемом как преобразование, может быть предпочтительным прекратить поиск последующих компонент, как только колебание падает ниже уровня, который, как предполагают, слишком мал, чтобы быть дыханием.
В соответствии с предпочтительным вариантом осуществления, упомянутый блок выбора выполнен с возможностью исследования для некоторых или всех упомянутых Q исходных сигналов по меньшей мере одного из следующих параметров: собственное значение, дисперсия, частота, корреляция исходного сигнала с соответствующим сигналом движения и пространственная корреляция. Таким образом, существуют одна или более возможностей для выбора правильного исходного сигнала, характеризующего движение дыхания. В варианте осуществления упомянутый блок преобразования выполнен с возможностью применения слепого разделения сигналов к соответствующим сигналам движения. Такое слепое разделение сигналов является полезным алгоритмом, чтобы разделить наблюдаемые смешанные сигналы движения на различные разделенные исходные сигналы.
Предпочтительно, упомянутый блок преобразования выполнен с возможностью вычисления упомянутого количества исходных сигналов, применяя анализ основных компонент (PCA) и/или анализ независимых компонент (ICA) к соответствующим сигналам движения, чтобы получить N исходных сигналов длины и соответствующие собственные значения или дисперсии. Эти собственные значения позволяют измерить дисперсию первоначальных данных сигналов движения в направлении соответствующих исходных сигналов, то есть, основные компоненты. Эти анализы являются полезными инструментами для реализации желаемого преобразования.
При PCA и ICA исходные сигналы являются линейными комбинациями Р сигналов движения. В варианте осуществления выбор основан на весовых коэффициентах комбинации (например, наибольший вес назначается области, которая, как полагают, вероятно, должна быть областью грудной клетки/брюшной области). Следует понимать, что эти весовые коэффициенты являются "параметрами исходного сигнала" в контексте настоящего изобретения.
Дополнительно, упомянутый блок преобразования выполнен с возможностью получения упомянутого количества исходных сигналов длиной N с соответствующими дисперсиями данных в направлении исходных сигналов. В целом, желательна дисперсия первоначальных данных в направлении независимого сигнала. В случае ICA, предпочтительно используется дисперсия данных в направлении векторов коэффициентов, из которых создаются независимые компоненты. В случае PCA, упомянутое количество исходных сигналов длиной N получается с помощью соответствующих дисперсий данных в направлении основных компонентов.
Как объясняется выше, существуют различные варианты выбора исходного сигнала, характеризующего сигнал дыхания. Для получения надежного выбора часто будет использоваться комбинация этих различных вариантов.
В соответствии с одним из вариантов осуществления, упомянутый блок выбора выполнен с возможностью выбора исходного сигнала из упомянутых исходных сигналов при помощи собственных значений или дисперсий и выбора исходного сигнала, имеющего собственное значение или дисперсию, которые больше минимального порога и меньше максимального порога для собственного значения. Эти пороги могут быть определены эмпирически, контролируя обоснованную дисперсию ожидаемого движения дыхания в кадрах изображения. Они определяют вероятный диапазон смещения от кадра к кадру для дышащего пациента. Он будет обычно зависеть от оптики и расстояния от камеры до пациента, но может быть фиксированным, если диапазон выбирается не слишком ограничивающим.
В соответствии с другим вариантом осуществления, упомянутый блок выбора выполнен с возможностью выбора исходного сигнала из упомянутых исходных сигналов, используя доминирующую частоту упомянутых исходных сигналов, причем выбирается исходный сигнал, имеющий доминирующую частотную составляющую в заданном диапазоне частот, содержащем ожидаемую частоту дыхания. В соответствии с еще одним вариантом осуществления, упомянутый блок выбора выполнен с возможностью выбора исходного сигнала из упомянутых исходных сигналов, используя корреляцию исходного сигнала с сигналами движения, и выбора исходного сигнала, имеющего самую высокую корреляцию с движениями в области грудной клетки или живота пациента. Наконец, в соответствии с вариантом осуществления, упомянутый блок выбора выполнен с возможностью выбора исходного сигнала из упомянутых исходных сигналов, используя пространственную корреляцию, и выбора исходного сигнала, имеющего наибольшую пространственно совместимую область в пределах кадров изображения.
Также, существуют различные варианты для вычисления сигнала движения. В одном из вариантов осуществления упомянутый блок вычисления сигнала движения выполнен с возможностью вычисления плотного или неплотного векторного поля движения, содержащего, упомянутое количество М сигналов движения. В другом варианте осуществления упомянутый блок вычисления сигнала движения выполнен с возможностью обработки упомянутого векторного поля движения посредством субдискретизации, группирования, усреднения или нелинейного объединения сигналов движения, в частности, для экономии затрат на вычисления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие варианты изобретения станут очевидны и будут объяснены со ссылкой на вариант(-ы) осуществления, описанные здесь далее. На сопроводительных чертежах:
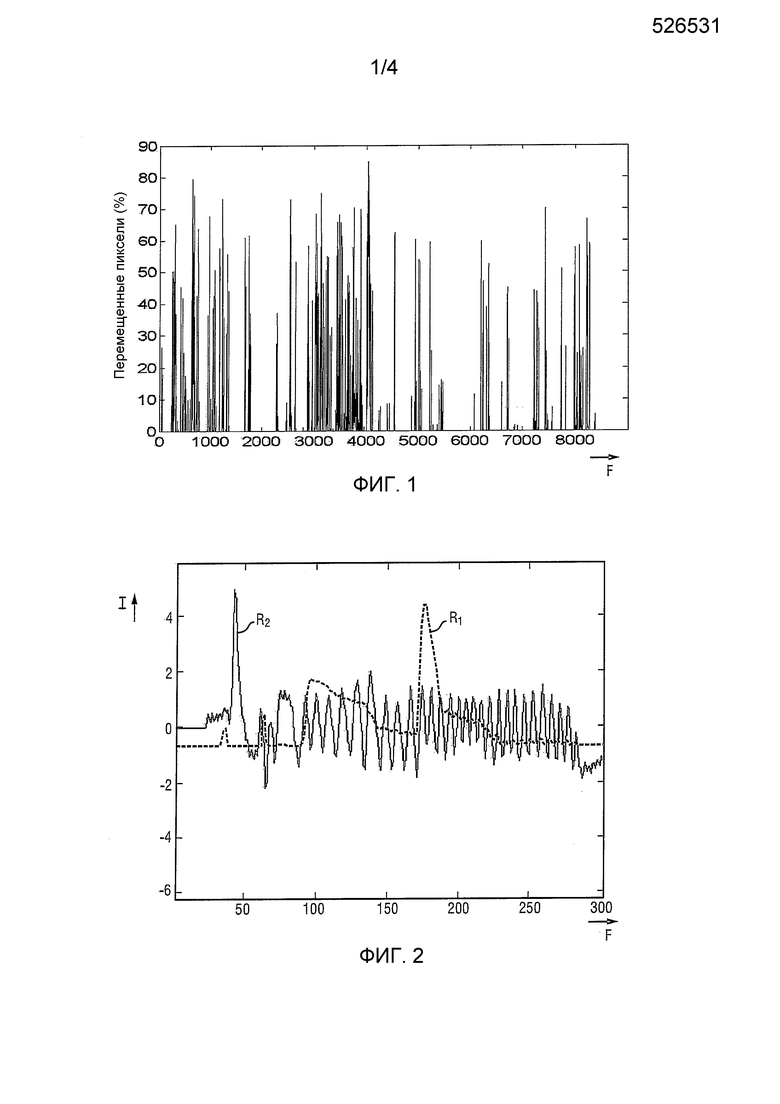
Фиг. 1 - схема движения ребенка во времени,
Фиг. 2 - сигнал дыхания, полученный известным способом, в сравнении с эталонным сигналом,
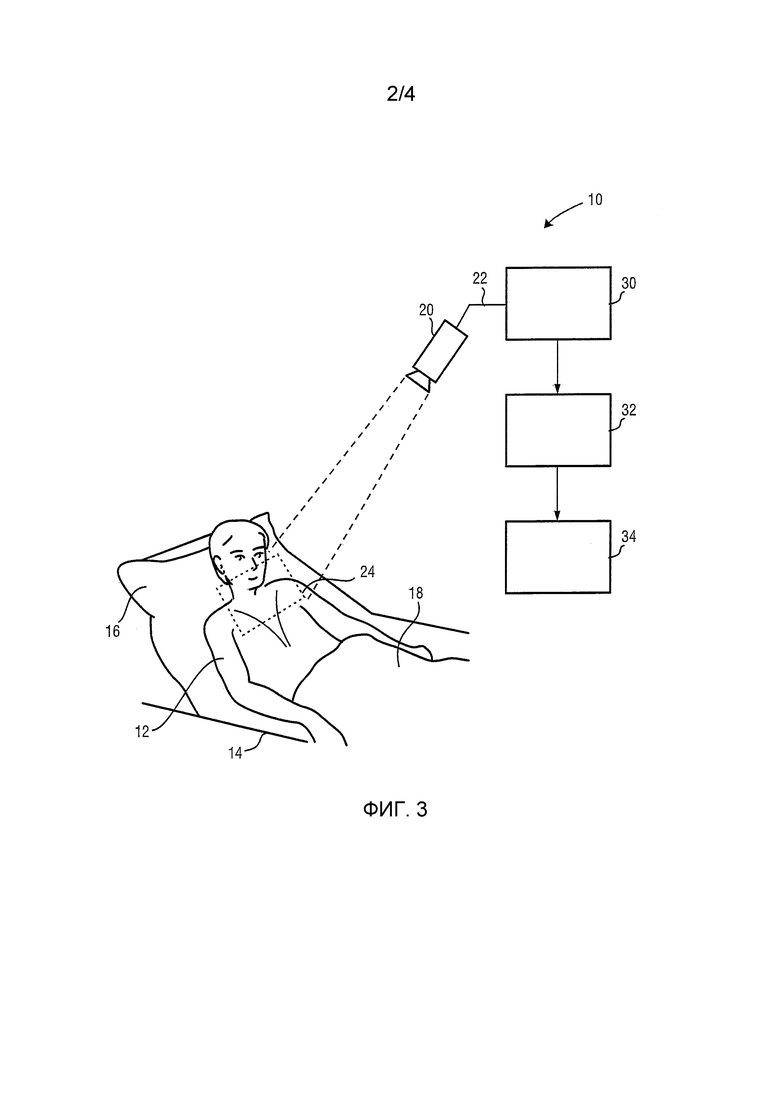
Фиг. 3 - устройство и система, соответствующие настоящему изобретению,
Фиг. 4 - векторное поле движения,
Фиг. 5 - несколько исходных сигналов,
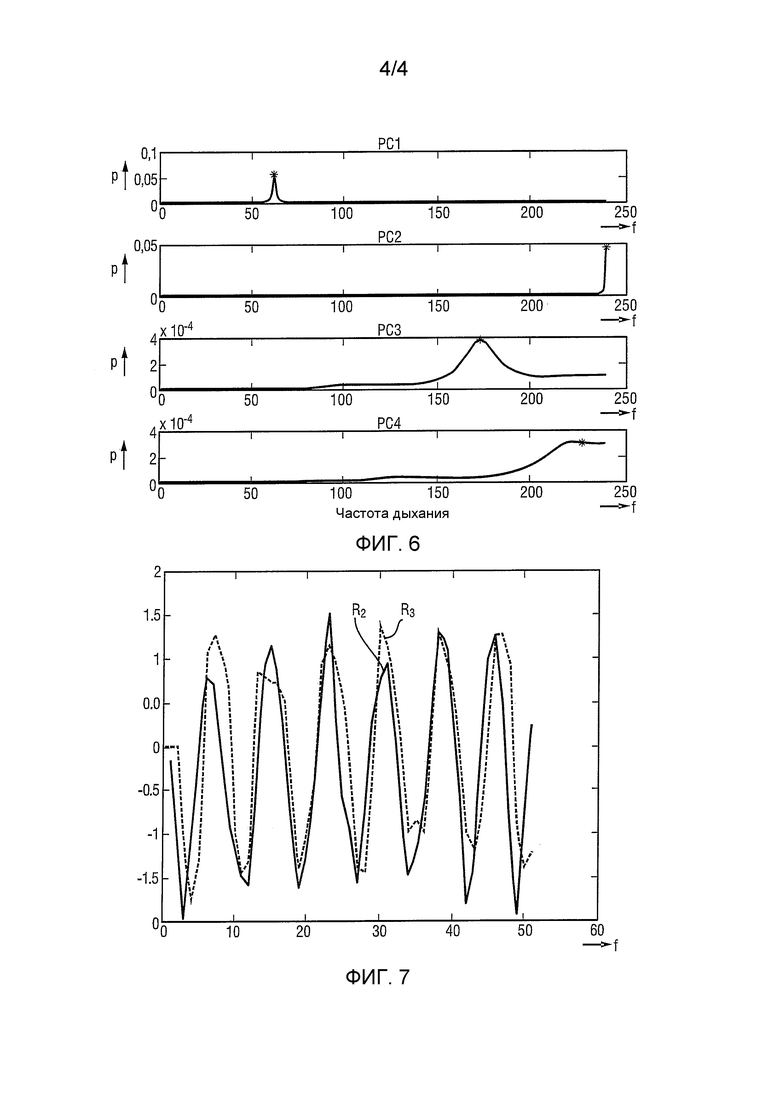
Фиг. 6 - спектр мощности исходных сигналов, показанных на Фиг. 5, и
Фиг. 7 - сигнал дыхания, полученный предложенным способом, по сравнению с эталонным сигналом.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как упомянуто выше обнаружение дыхательной информации основано на обнаружении при дыхании тонкого движения части тела пациента (обычно человека, но также и животного), который демонстрирует движение, вызванное дыханием, в частности, области грудной клетки и/или живота. Наилучшие места обычно содержат информацию с краев (для достоверной оценки движения) и движутся благодаря дыханию, что обычно подразумевает, что они связаны с областью грудной клетки или брюшной областью (но они могут быть одеялом, покрывающим новорожденного, или плечом или четкой деталью на свитере взрослого). Менее вероятными областями являются конечности, которые имеют тенденцию двигаться независимо от частоты дыхания, или части постели, не имеющие механического контакта с областью грудной клетки или живота.
Такой незаметный, основанный на изображении контроль дыхания чувствителен к недыхательному движению пациента, то есть любое недыхательное движение, наблюдаемое в соответствующей области тела (например, область грудной клетки и/или живота), потенциально вносит ошибки измерения.
Одним из основных сценариев использования является бесконтактный контроль дыхания новорожденных младенцев в неонатальном блоке ICU (NICU, Neonatal Intensive Care Unit, блок интенсивной терапии для новорожденных). Как показано на схеме прохождения сигналов на Фиг. 1, характеризующих движение (то есть процент перемещенных пикселей) ребенка во времени (то есть, для числа F кадров), ребенок часто совершает движения тела, когда бодрствует. Недыхательные движения младенца делают измерение дыхательного сигнала зашумленным или неточным.
На Фиг. 2 показана схема прохождения сигналов для примера текущего контроля дыхания, когда тело младенца движется. В частности, интенсивность I измеренного сигнала R1 дыхания, полученная из изображений, соответствующих известному способу, и интенсивность эталонного сигнала R2 дыхания, полученная традиционным детектором частоты дыхания (например, датчиком типа браслета) или любым другим соответствующим измерительным оборудованием (в этом примере датчиком ECG), сравниваются во времени (то есть для F кадров). Как можно видеть, измеренный сигнал R1 дыхания неточен.
Контроль дыхания на основе изображения (или основанный на видеокамере) использует обнаружение дыхательного движения, в частности, в области грудной клетки/живота. На практике, помимо дыхания, совершаемые пациентом дополнительные недыхательные движения (например, движения тела) и шум также вызывают движение в области грудной клетки/живота. Поэтому наблюдаемые сигналы движения фактически представляют собой смесь дыхательного движения, недыхательного движения и шума, например, из-за ошибки оценки. Предполагается, что эти источники не коррелированы. В соответствии с настоящим изобретением, предлагается применить преобразование (например, технологию слепого разделения сигналов (источников), такую как PCA (анализ основных компонент) или ICA (анализ независимых компонент)), чтобы разделить наблюдаемый смешанный сигнал движения (показывающий различный вклад от различного движения и шума) на различные источники и затем выбрать исходный сигнал, характеризующий дыхание.
На Фиг.3 представлен первый примерный вариант осуществления устройства 10 для получения дыхательной информации пациента 12 в соответствии с настоящим изобретением. Пациент 12 лежит в кровати 14, причем голова пациента 12 лежит на подушке 16 и пациент 12 накрыт одеялом 18. Устройство 10 содержит блок 20 формирования изображений (например, видеокамера) для получения набора данных 22 изображения (то есть последовательность изображения или видеоданные, содержащие множество кадров изображения), получаемых для участка 24 тела пациента 12, демонстрирующего движение, вызванное дыханием, в частности, для области грудной клетки или живота. Устройство 10 вместе с блоком 20 формирования изображений образуют систему 1, как предложено в соответствии с настоящим изобретением.
В целом, устройство 10 содержит блок 30 вычисления сигнала движения для вычисления М сигналов движения для множества пикселей и/или групп пикселей, по меньшей мере, в интересующей области для N кадров изображения пациента. Дополнительно, блок 32 преобразования обеспечивается для вычисления некоторых или всех сигналов движения, многочисленных исходных сигналов, характеризующих независимые движения в пределах упомянутых изображений, применяя преобразование к сигналам движения, чтобы получить исходные сигналы, характеризующие независимые движения в пределах упомянутых кадров изображения. Наконец, блок 34 выбора обеспечивается для выбора исходного сигнала из упомянутых вычисленных исходных сигналов, характеризующих дыхание упомянутого пациента, исследуя одно или более свойств упомянутых исходных сигналов для некоторых или всех упомянутых вычисленных исходных сигналов.
Блок 30 вычисления сигнала движения, блок 32 преобразования и блок 34 выбора могут быть реализованы отдельными элементами (например, процессорами или функциями программного обеспечения), но могут быть также представлены и реализованы общим оборудованием обработки или компьютером. Вариант осуществления различных блоков будет объяснен более подробно далее.
Для входных изображений (например, видеопоток или последовательность изображений), полученных блоком 20 формирования изображений (например, RGB-камера, инфракрасная камера и т.д.), векторное поле движения сначала вычисляется в блоке 30 вычисления сигнала движения, соответствующем варианту осуществления. Многочисленные опции для оценки движения, как разреженного, так и плотного, возможны и полезны. Например, алгоритм оптического потока, описанный в работе Gautama, T. and Van Hulle, M.M., A Phase-based Approach to the Estimation of the Optical Flow Field Using Spatial Filtering, IΕΕΕ Trans. Neural Networks, Vol. 13(5), 2002, pp. 1127-1136, может быть применен, чтобы получить плотное векторное поле движения, как, например, показано на Фиг. 4. Альтернативно, алгоритм оценки движения по совпадению блоков, описанный в работе G. de Haan, P.W.A.C Biezen, H. Huijgen, and O.A. Ojo, True Motion Estimation with 3-D Recursive Search Block-Matching, IEEE Trans. Circuits and Systems for Video Technology, Vol. 3, 1993, pp. 368-388, или оценка движения на основе сегментов могут применяться, чтобы получить вектор движения для каждого блока/группы/сегмента пикселей. Наконец, средство слежения за признаком Лукаса-Кэнэйда (KLT) (или подобные алгоритмы) может быть адаптировано и использовано для обнаружения соответствия локальных точек признака и формирования неплотного векторного поля движения. Также возможно эффективно вычислять движение только для так называемых характерных точек, например, обнаруженных с помощью детектора Харриса, что приводит к неплотному векторному полю (не доступному для всех местоположений), которое может быть введено в последующий алгоритм.
Вместо вычисления векторов движения для всего кадра изображения, интересующая область (ROI) может быть выбрана вручную или автоматически для вычисления векторов движения.
Дополнительно, чтобы снизить стоимость вычислений, перед дальнейшей обработкой плотное или основанное на блоках вычисленное векторное поле движения может также субдискретизироваться. Кроме того, основанное на сегментах или неплотное векторное поле может быть предварительно обработано, чтобы (дополнительно) сократить количество векторов движения, обеспечиваемых для последующей обработки. Эта предварительная обработка может содержать субдискретизацию или группировку и может содержать нелинейное объединение векторов движения, используя медианные фильтры, фильтры усеченного среднего значения и т.д.
Учитывая вычисленные векторы движения, сигнал движения для множества или для каждой локальной области в ROI вычисляется, основываясь на векторах движения внутри области. Локальная область может быть одним пикселем (например, после упомянутой выше субдискретизации) или множеством пикселей (например, 3x3 пикселей). Сигнал движения может быть медианой среднего значения векторов движения в области. Сигнал движения в каждой позиции для N кадров (например, N=50) является одной выборкой данных длиной N. Полагая, что в ROI существует М точек (или областей), получают матрицу данных M*N для дальнейшей обработки.
В варианте осуществления блока 32 преобразования к матрице данных сигналов движения, приводящей в результате к набору отдельных исходных сигналов, применяется алгоритм слепого разделения сигналов, широко известный в технике (например, описанный в работе Cardoso, J.-F., Blind signal separation: statistical principles, Proceedings of the IEEE, 86(10), Oct 1998, pp. 2009-2025) (например, PCA) или комбинация алгоритмов (например, PCA и ICA).
В одном из вариантов осуществления для обработки принимается алгоритм PCA. Входные данные (Mx) для PCA, полученные от объясненного выше варианта осуществления блока 30 вычисления сигнала движения, представляют движение М областей для N кадров в последовательности кадров изображения. Каждая из этих М областей дает сигнал движения с длиной N. Применяя PCA к матрице данных M*N, получают множество собственных векторов (длиной M) с соответствующими собственными значениями. Собственный вектор содержит веса, приданные каждому из этих М сигналов, чтобы обеспечить взвешенный средний сигнал движения (то есть исходный сигнал, также названный основным компонентом). Сигналы, соответствующие индивидуальным собственным векторам, являются ортогональными, то есть, их ковариантность равна нулю. Во все же других отношениях, они представляют на видео независимые движения. Один из них, как ожидают, будет движением дыхания, которое должно быть найдено среди рассеянных компонент движения в последовательности кадров изображения. С другой стороны, собственные значения представляют дисперсию исходных данных в направлении соответствующего исходного сигнала (основной компонент).
В целом, для М сигналов движения в блоке преобразования вычисляют множество Q исходных сигналов, характеризующих независимые движения внутри упомянутых изображений (где 2 ≤ P ≤ М и 2 ≤ Q ≤ P). Максимальное количество собственных векторов равно количеству областей М. В практических ситуациях, однако, может использоваться только меньшее количество Q (например, 10 или 20 собственных векторов) с наибольшим собственным значением. В варианте осуществления используют выбор собственных векторов, которые имеют собственное значение в разумном диапазоне (для ожидаемого движения при дыхании). Например, в варианте осуществления в ROI могут рассматриваться несколько сотен областей (например, M=200). Минимальное количество областей не должно быть слишком низким (например, не ниже 3).
В варианте осуществления блок 34 выбора из данного набора отделенных исходных сигналов (как в качестве примера представлено на Фиг. 5, где показана интенсивность I четырех исходных сигналов для F кадров), выбирают исходный сигнал, характеризующий дыхание (то есть обеспечивающий наибольшее отношение SNR (сигнал/шум) для движения дыхания). Исследуя собственные значения, основные компоненты со слишком большими или также слишком малыми собственными значениями (характеризующие большие движения тела или шумы) отбрасываются. На Фиг. 5 показаны остающиеся основные компоненты, полученные для примерного видеосегмента.
В частности, четыре сигнала, показанных на Фиг. 5, являются результирующими независимыми сигналами движения, полученными перемножением собственных векторов с сигналами движения от М областей. Они являются различными линейными комбинациями сигналов движения от М областей в ROI.
Последующий (альтернативный или дополнительный) выбор может использовать частотную информацию отделенных исходных сигналов и/или корреляцию разделенных исходных сигналов с оригинальными сигналами движения, как будет объяснено далее.
Движение дыхания обладает определенной частотой, например, для новорожденных, это может быть [0,5, 1,5] Гц (то есть [30, 90] вдохов в минуту). Поэтому, исходный сигнал, характеризующий дыхание, как предполагается, должен иметь четкий пик(-и) в этом частотном диапазоне. На Фиг.6 графически показан спектр мощности (мощность p в зависимости от частоты f) для каждого источника сигнала, показанного на Фиг. 5. Очевидно, может быть выбран первый сигнал, который очень хорошо представляет дыхание, как представлено на Фиг. 7, где показана частота выбранного исходного сигнала R3 в сравнении с опорным сигналом R2 для F кадров.
В соответствии с другим вариантом осуществления блока 34 выбора определяется и исследуется корреляция некоторых или каждого исходного сигнала с оригинальными сигналами движения во входных кадрах. Движение дыхания, как предполагается, должно иметь высокую корреляцию в области грудной клетки/живота. На практике область грудной клетки/живота может быть известна (например, обнаруживается автоматически посредством распознавания образов или определяется вручную). Сравнивая корреляцию некоторых или каждого исходного сигнала в области грудной клетки/живота, можно выбрать исходный сигнал, характеризующий дыхание.
В соответствии с другим вариантом осуществления блока 34 выбора, анализируют пространственные корреляции и ищут большой совместимый сегмент. Здесь предполагается, что движение дыхания обнаруживается в пространственно совместимой области в изображении, положение которой примерно известно, в то время как другие независимые компоненты могут возникать в более рассеянных областях и/или в областях, где маловероятно присутствие дыхания.
В итоге, сравнивая результаты предложенных устройства и способа (как например, показано на Фиг. 7) с результатами известных алгоритмов (как показано на Фиг. 2) для нескольких видеосегментов (когда ребенок обладает движением, не связанным с дыханием), очевидно, что предложенные устройство и способ обеспечивают более точное и устойчивое измерение дыхательного сигнала.
Настоящее изобретение может использоваться для измерения дыхания, основанного на видеокамере, используя монохромные или цветные камеры и видимое или инфракрасное освещение, и приемлемо для многих применений, в том числе, контроля пациента (в том числе для контроля новорожденных), домашнего контроля самочувствия, контроля сна, спорта (контроля человека во время физических упражнений) и т.д.
Хотя изобретение было подробно показано и описано на чертежах и в предшествующем описании, такие чертежи и описание следует считать иллюстративными или примерными и не создающими ограничений; изобретение не ограничивается раскрытыми вариантами осуществления. При реализации заявленного изобретения на основании изучения чертежей, раскрытия и добавленной формулы изобретения специалистами в данной области техники могут быть предложены и реализованы другие изменения в раскрытых вариантах осуществления.
В формуле изобретения слово "содержащий" не исключает другие элементы или этапы и единственное число не исключает множественное число. Один элемент или другой блок могут выполнять функции нескольких позиций, приведенных в формуле изобретения. Простой факт, что некоторые критерии приводятся во взаимно различных зависимых пунктах формулы изобретения, не означает, что объединение этих критериев не может использоваться для достижения преимущества.
Компьютерная программа может храниться/распространяться на соответствующем непередаваемом носителе, таком как оптический носитель или твердотельный носитель, поставляемом вместе или как часть другого аппаратурного обеспечения, но может также распространяться в других формах, таких как через Интернет или другие проводные или беспроводные системы связи.
Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничение объема изобретения.

Группа изобретений относится к медицине. Способ получения дыхательной информации пациента осуществляют с помощью устройства получения дыхательной информации. При этом вычисляют с помощью блока вычисления сигнала движения множество М сигналов движения для множества пикселей и/или групп пикселей в интересующей области для множества N кадров изображения пациента. Вычисляют с помощью блока преобразования для некоторых или для всех М сигналов движения множество исходных сигналов, характеризующих независимые движения внутри упомянутых изображений, применяя преобразование к соответствующим сигналам движения, чтобы получить исходные сигналы, характеризующие независимые движения внутри упомянутых N кадров изображения. Блок вычисления сигнала движения выполнен с возможностью вычисления плотного или неплотного векторного поля движения, содержащего М сигналов движения, или с возможностью обработки упомянутого векторного поля движения посредством субдискретизации, группировки, усреднения или нелинейного объединения сигналов движения. Сигналы движения в форме векторного поля движения являются пиксельными и/или блочными, вычисленными для некоторых или всех изображений в пределах интересующей области. Выбирают с помощью блока выбора исходный сигнал из упомянутых вычисленных исходных сигналов, характеризующих дыхание упомянутого пациента, исследуя одно или более свойств упомянутых исходных сигналов для некоторых или всех упомянутых вычисленных исходных сигналов. Достигается повышение точности и надежности получения дыхательной информации пациента в отношении движения пациента, не связанного с дыханием. 4 н. и 9 з.п. ф-лы, 7 ил.
1. Устройство получения дыхательной информации пациента, содержащее:
блок (30) вычисления сигнала движения для вычисления множества М сигналов движения для множества пикселей и/или групп пикселей, по меньшей мере, в интересующей области для множества N кадров изображения пациента,
причем
блок вычисления сигнала движения выполнен с возможностью вычисления плотного или неплотного векторного поля движения, содержащего М сигналов движения, или
с возможностью обработки упомянутого векторного поля движения посредством субдискретизации, группировки, усреднения или нелинейного объединения сигналов движения,
причем сигналы движения в форме векторного поля движения являются пиксельными и/или блочными, вычисленными для некоторых или всех изображений, по меньшей мере, в пределах интересующей области,
блок (32) преобразования для вычисления для некоторых или всех М сигналов движения множества исходных сигналов, характеризующих независимые движения внутри упомянутых изображений, применяя преобразование к соответствующим сигналам движения, чтобы получить исходные сигналы, характеризующие независимые движения внутри упомянутых N кадров изображения, и
блок (34) выбора для выбора из упомянутых вычисленных исходных сигналов исходного сигнала, характеризующего дыхание упомянутого пациента, исследуя одно или более свойств упомянутых исходных сигналов для некоторых или всех упомянутых вычисленных исходных сигналов.
2. Устройство по п. 1,
в котором упомянутый блок (32) преобразования выполнен с возможностью вычисления, для P из упомянутых М сигналов движения, Q исходных сигналов, характеризующих независимые движения внутри упомянутых изображений, причем 2 ≤ P ≤ М и 2 ≤ Q ≤ P, применяя преобразование к соответствующим Р сигналам движения, чтобы получить упомянутые Q исходных сигналов, характеризующих независимые движения внутри упомянутых N кадров изображения.
3. Устройство по п. 2,
в котором упомянутый блок (34) выбора выполнен с возможностью исследования, для некоторых или всех упомянутых Q исходных сигналов, по меньшей мере одного из следующих параметров: собственные значения, дисперсия, частота, корреляция исходного сигнала с соответствующим сигналом движения и пространственная корреляция сигналов, соответствующих различным точкам пространства.
4. Устройство по п. 2,
в котором упомянутый блок (32) преобразования выполнен с возможностью применения слепого разделения сигналов к соответствующим Р сигналам движения.
5. Устройство по п. 1,
в котором упомянутый блок (32) преобразования выполнен с возможностью вычисления упомянутого множества исходных сигналов, применяя анализ основных компонент и/или анализ независимых компонент к соответствующим сигналам движения, чтобы получить исходные сигналы длиной N и соответствующие собственные значения или дисперсии.
6. Устройство по п. 5,
в котором упомянутый блок (32) преобразования выполнен с возможностью получения упомянутого количества исходных сигналов длиной N с соответствующими дисперсиями данных в направлении исходных сигналов.
7. Устройство по п. 1,
в котором упомянутый блок (34) выбора выполнен с возможностью выбора исходного сигнала из упомянутых исходных сигналов, используя собственные значения или дисперсии, и выбора исходного сигнала, имеющего собственное значение или дисперсию, которые больше минимального порога и меньше максимального порога для собственного значения.
8. Устройство по п. 1,
в котором упомянутый блок (34) выбора выполнен с возможностью выбора исходного сигнала из упомянутых исходных сигналов при помощи доминирующей частоты упомянутых исходных сигналов, причем выбирается исходный сигнал, имеющий доминирующую частотную составляющую внутри заданного частотного диапазона, включающего в себя ожидаемую частоту дыхания.
9. Устройство по п. 1,
в котором упомянутый блок (34) выбора выполнен с возможностью выбора исходного сигнала из упомянутых исходных сигналов, используя корреляцию исходного сигнала с сигналами движения, и выбора исходного сигнала, имеющего самую высокую корреляцию с движениями в области грудной клетки или живота пациента.
10. Устройство по п. 1,
в котором упомянутый блок (34) выбора выполнен с возможностью выбора исходного сигнала из упомянутых исходных сигналов при помощи пространственной корреляции, определяемой для пространственно совместимой области внутри кадров изображения.
11. Система получения дыхательной информации пациента, содержащая:
- блок (20) формирования изображений для получения множества N кадров изображения пациента, и
- устройство по любому из пп. 1-10 для получения дыхательной информации пациента, используя упомянутые полученные N кадров изображения пациента.
12. Способ получения дыхательной информации пациента, содержащий этапы, на которых:
- вычисляют множество М сигналов движения для множества пикселей и/или групп пикселей, по меньшей мере, интересующей области для множества N кадров изображения пациента,
- вычисляют для некоторых или для всех М сигналов движения множество исходных сигналов, характеризующих независимые движения внутри упомянутых изображений, применяя преобразование к соответствующим сигналам движения, чтобы получить исходные сигналы, характеризующие независимые движения внутри упомянутых N кадров изображения,
с возможностью вычисления плотного или неплотного векторного поля движения, содержащего М сигналов движения,
или с возможностью обработки упомянутого векторного поля движения посредством субдискретизации, группировки, усреднения или нелинейного объединения сигналов движения,
причем сигналы движения в форме векторного поля движения являются пиксельными и/или блочными, вычисленными для некоторых или всех изображений, по меньшей мере, в пределах интересующей области,
и
- выбирают исходный сигнал из упомянутых вычисленных исходных сигналов, характеризующих дыхание упомянутого пациента, исследуя одно или более свойств упомянутых исходных сигналов для некоторых или всех упомянутых вычисленных исходных сигналов.
13. Машиночитаемый носитель, на котором хранится компьютерная программа, содержащая средство программного кода, сконфигурированный для выполнения компьютером этапов способа по п. 12, когда упомянутая компьютерная программа выполняется на компьютере.
| US 2009187112 A1, 23.07.2009 | |||
| US 2005288600 A1, 29.12.2005 | |||
| US 2011251493 A1, 13.10.2011 | |||
| WO 2011088227 A1, 21.07.2011 | |||
| ТВЕРДОЭЛЕКТРОЛИТНЫЙ ДАТЧИК КОНЦЕНТРАЦИИ КИСЛОРОДА И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2004 |
|
RU2298176C2 |
| JP 2012239661 A, 10.12.2012 | |||
| WO 2010092366 A1, 19.08.2010 | |||
| RU 2011111518 A, 27.09.2012. | |||

