ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству определения движения и способу определения движения подвижного объекта. Изобретение дополнительно относится к соответствующей компьютерной программе.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В заявке США 2009/0062628 А1 предлагается устройство для диагностики во сне, содержащее трехмерный датчик ускорения, детектор позы, выполненный с возможностью определения позы пациента по постоянной компоненте трехмерного датчика ускорения, и детектор дыхательного перемещения, выполненный с возможностью определения дыхательного перемещения пациента по переменной компоненте трехмерного датчика ускорения.
В публикации WO 2004/043263 A2 описано устройство контроля дыхательных движений, подлежащее использованию с людьми, а также с животными для управления дыхательными движениями, частности для управления периодами апноэ у младенцев. Устройство содержит акселерометр и микроконтроллер, при этом акселерометр содержит детектор движения и множество выходных штекеров, и микроконтроллер содержит множество входных штекерных гнезд. Множество выходных штекеров подсоединяют к множеству входных штекерных гнезд, и микроконтроллер содержит сигнальные выводы, которые подключают к средствам сигнализации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Устройство контроля дыхательных движений, описанное в публикации WO 2004/043263 A2, работает на основе сигнала акселерометра по одной пространственной оси. Поскольку обусловленные дыханием изменения сигнала акселерометра вызываются изменениями ориентации относительно направления силы тяжести, то, когда ориентация единственной пространственной оси относительно направления силы тяжести не изменяется из-за дыхания, возникает проблема, так как в данном случае дыхание невозможно контролировать с использованием единственной оси. Данная проблема может возникать, например, если вызываемое дыханием перемещение является поворотом вокруг самой единственной пространственной оси, независимо от ее ориентации относительно направления силы тяжести. Кроме того, если вызываемое дыханием перемещение является поворотом вокруг оси поворота, близкой к единственной пространственной оси акселерометра, то измеряется исключительно слабый сигнал акселерометра с низким отношением сигнала к шуму. В результате снижается качество сигнала акселерометра, вызываемого дыханием.
Целью настоящего изобретения является создание устройства определения движения и способа определения движения подвижного объекта, при этом сигнал движения, являющийся показателем движения, формируется с использованием акселерометра, причем качество сигнала движения повышается.
В соответствии с первым аспектом настоящего изобретения, предлагается устройство определения движения для определения движения подвижного объекта, при этом устройство определения движения содержит:
- многоосевой акселерометр для размещения на подвижном объекте, причем многоосевой акселерометр выполнен с возможностью формирования сигналов акселерометра, показывающих ускорение вдоль разных пространственных осей,
- блок формирования сигнала движения для формирования сигнала движения, показывающего движение объекта, посредством комбинирования сигналов акселерометра по разным пространственным осям, причем блок формирования сигнала движения выполнен с возможностью линейного комбинирования сигналов акселерометра по разным пространственным осям, причем сигналы акселерометра взвешиваются таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, имел наибольший вес.
Поскольку акселерометр является многоосевым акселерометром, то перемещение, являющееся поворотом вокруг одной из осей многоосевого акселерометра, дает изменение сигнала акселерометра по другой из осей многоосевого акселерометра. Следовательно, комбинирование сигналов акселерометра по разным пространственным осям дает сильный сигнал движения, имеющий высокое отношение сигнала к шуму, даже если ось расположена близко к оси поворотного перемещения, которое следует обнаруживать многоосевым акселерометром. Приведенный результат повышает качество сигнала, т.е. сигнала движения, и, следовательно, облегчает дополнительную обработку сигнала. Например, алгоритм автоматического определения частоты дыхания или частоты сердечных сокращений по сигналу движения дает улучшенные результаты, если повышено качество сигнала движения, на котором основано определение, в частности, если повышено отношение сигнала к шуму сигнала движения.
В предпочтительном варианте, многоосевой акселерометр является трехосевым акселерометром, выполненным с возможностью формирования трех сигналов акселерометра, показывающих ускорение по трем ортогональным пространственным осям, при этом блок формирования сигнала движения выполнен с возможностью комбинирования трех упомянутых сигналов акселерометра для формирования сигнала движения, показывающего движение объекта.
В предпочтительном варианте, многоосевой акселерометр выполнен с возможностью размещения на части тела человека, при этом, блок формирования сигнала движения выполнен с возможностью формирования сигнала движения, показывающего, по меньшей мере, одно из дыхания и сердечной деятельности человека. Для формирования сигнала движения, показывающего дыхание, многоосевой акселерометр размещают, предпочтительно, на нижних ребрах, приблизительно, на половине расстояния между центральным и боковым положением. Однако многоосевой акселерометр может быть размещен также в других положениях, например на животе, в частности, если действуют ограничения из-за физических данных тела, например послеоперационных ран.
Для формирования сигнала движения, показывающего частоту сердечных сокращений, многоосевой акселерометр размещают, предпочтительно, на левой стороне живота/грудной клетки. В дополнительном предпочтительном варианте, акселерометр размещают на нижних ребрах, в частности, на левых нижних ребрах. Дополнительное предпочтительное положение многоосевого акселерометра для формирования сигнала движения, показывающего частоту сердечных сокращений, является более высоким положением на грудной клетке или положением внизу на животе. В частности, предпочтительные положения для определения сигнала движения, показывающего дыхание, являются также предпочтительными для измерения сигнала движения, показывающего частоту сердечных сокращений. В частности, для формирования сигнала движения, показывающего частоту дыхания и сердечных сокращений, многоосевой акселерометр размещают, предпочтительно, на нижних ребрах, на половине расстояния между центральным и левым боковым положением.
В предпочтительном варианте, устройство определения движения дополнительно содержит, по меньшей мере, один из блока определения частоты дыхания для определения частоты дыхания и блока определения частоты сердечных сокращений для определения частоты сердечных сокращений в зависимости от сформированного сигнала движения.
Приведенное решение допускает удобный, недорогой, непрерывный и амбулаторный контроль частоты дыхания и/или частоты сердечных сокращений.
В одном варианте осуществления, основная частота формируемого сигнала движения является частотой сердечных сокращений, если сигналы акселерометра формируются в состоянии задержки дыхания. Если сигналы акселерометра формируются в то время, когда человек дышит, то считается, что основная частота сигнала движения соответствует частоте дыхания.
В предпочтительном варианте, устройство определения движения дополнительно содержит блок фильтрации для фильтрации сигналов акселерометра таким образом, чтобы через блок фильтрации проходили частоты, соответствующие возможным частотам движения, подлежащего определению.
Приведенное решение ослабляет шумы и возможные дополнительные нежелательные воздействия окружающей среды на сигналы акселерометра. Если сигнал движения должен показывать дыхание, то блок фильтрации, предпочтительно, выполнен с возможностью фильтрации сигналов акселерометра таким образом, чтобы через блок фильтрации проходили частоты, соответствующие возможным частотам дыхательного движения. В данном случае, через фильтр проходят частоты, предпочтительно, в диапазоне частот 0,1-2 Гц. Если блок формирования сигнала движения выполнен с возможностью формирования сигнала движения, показывающего сердечную деятельность человека, то блок фильтрации, предпочтительно, выполнен с возможностью фильтрации сигналов акселерометра таким образом, чтобы через блок фильтрации проходили частоты, соответствующие возможным частотам движения при сердечной деятельности, например, блок фильтрации может быть выполнен с возможностью фильтрации сигналов акселерометра таким образом, чтобы через блок фильтрации проходили частоты в диапазоне частот 0,5-3 Гц.
В дополнительном предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью циклического формирования сигнала движения на основании сигналов акселерометра, сформированных в течение предшествующего во времени заданного временного интервала.
Приведенное решение позволяет адаптировать комбинацию сигналов акселерометра к фактическим условиям, например фактической ориентации осей многоосевого акселерометра. Приведенное решение допускает, например, определение сигнала движения, показывающего, по меньшей мере, одно из дыхания и сердечной деятельности человека, даже если человек изменяет свою позу. Заданный временной интервал составляет, например, заданный временной интервал не более 20 секунд.
Блок формирования сигнала движения выполнен с возможностью комбинирования сигналов акселерометра таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, вносил наибольший вклад в сигнал движения.
Поскольку считается, что сигнал акселерометра, характеризующийся максимальным изменением ускорения, имеет максимальное отношение сигнала к шуму, то посредством комбинирования сигналов акселерометра таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, вносил наибольший вклад в сигнал движения, можно повысить отношение сигнала к шуму сигнала движения. В предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью комбинирования сигналов акселерометра таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения в диапазоне частот, соответствующем движению, подлежащему определению, вносил наибольший вклад в сигнал движения.
Блок формирования сигнала движения выполнен с возможностью линейного комбинирования сигналов акселерометра по разным пространственным осям, при этом сигналы акселерометра взвешиваются таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, имел наибольший вес.
В предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью определения веса сигнала акселерометра в зависимости от корреляции соответствующего сигнала акселерометра с сигналом акселерометра, характеризующимся максимальным изменением ускорения, при этом вес соответствующего сигнала акселерометра повышается, если соответствующая корреляция оказывается выше.
Приведенное решение позволяет формировать сигнал движения таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, вносил наибольший вклад в сигнал движения. В предпочтительном варианте, для определения корреляции используют, так называемый, «коэффициент выборочной корреляции» или «коэффициент корреляции по смешанным моментам Пирсона».
В дополнительном предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью определения веса сигнала акселерометра в зависимости от корреляции соответствующего сигнала акселерометра с сигналом акселерометра, характеризующимся максимальным изменением ускорения, при этом вес соответствующего сигнала акселерометра является знаком корреляции.
Приведенное решение позволяет комбинировать сигналы акселерометра по разным пространственным осям в зависимости от их фазового соотношения таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, вносил наибольший вклад в сформированный сигнал движения.
В дополнительном предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью выполнения анализа главных компонент сигналов акселерометра по разным пространственным осям и с возможностью определения компоненты движения из главных компонент, получаемых в результате применения анализа главных компонент, которая показывает движение, подлежащее определению, в качестве сигнала движения. Таким образом, компонента главных компонент выбирается как компонента движения, т.е. сигнал движения. В предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью определения первой главной компоненты в качестве сформированного сигнала движения.
Кроме того, применение анализа главных компонент и применение полученной компоненты, в частности, полученной первой главной компоненты, в качестве сформированного сигнала движения позволяет комбинировать сигналы акселерометра таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, вносил наибольший вклад в сформированный сигнал движения.
Анализ главных компонент является, предпочтительно, стандартным ортогональным линейным преобразованием, которое преобразует сигналы ускорения в новую систему координат таким образом, чтобы максимальная дисперсия любой проекции данных приходилась на первую главную компоненту, вторая по величине дисперсия приходилась на вторую главную компоненту, и третья по величине дисперсия приходилась на третью главную компоненту.
В дополнительном предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью определения, для каждой пространственной оси акселерометра, максимизированного проецированного сигнала изменения ускорения и с возможностью формирования сигнала движения посредством комбинирования максимизированных проецированных сигналов, при этом блок формирования сигнала движения выполнен с возможностью определения максимизированного проецированного сигнала по пространственной оси акселерометра посредством проецирования перемещения гравитационного вектора относительно пространственных осей акселерометра на подпространство, заданное номинальным гравитационным вектором и соответствующей пространственной осью акселерометра, и посредством такого преобразования соответствующей оси внутри подпространства, чтобы проекция спроецированного перемещения гравитационного вектора, который был спроецирован на подпространство, на преобразованную соответствующую ось достигала максимума. Подпространство, предпочтительно, является плоскостью. Номинальный гравитационный вектор является вектором, ориентированным таким образом, чтобы он указывал среднее перемещение гравитационного вектора относительно разных пространственных осей акселерометра, т.е. перемещение гравитационного вектора можно описать как отклонения относительно номинального гравитационного вектора.
В дополнительном предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью формирования сигнала движения посредством определения модуля вектора максимизированных проецированных сигналов и посредством комбинирования полученного модуля вектора со знаком, по меньшей мере, одного из максимизированных проецированных сигналов. В предпочтительном варианте, полученный модуль вектора умножают на знак, по меньшей мере, одного из максимизированных проецированных сигналов. В дополнительном предпочтительном варианте, полученный модуль вектора умножают на знак максимизированного проецированного сигнала, имеющего максимальную амплитуду.
Приведенное решение позволяет формировать сигнал движения, имеющий повышенное отношение сигнала к шуму.
В дополнительном предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью выполнения анализа главных компонент максимизированных проецированных сигналов, при этом полученная первая главная компонента является сформированным сигналом движения.
Приведенное решение позволяет комбинировать сигналы акселерометров по разным пространственным осям таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, вносил наибольший вклад в сигнал движения.
В дополнительном предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью выполнения анализа независимых компонент сигналов акселерометра по разным пространственным осям и с возможностью определения компоненты движения из независимых компонент, получаемых в результате выполнения анализа независимых компонент, которая показывает движение, подлежащее определению, в качестве сигнала движения. Таким образом, компонента независимых компонент выбирается как компонента движения, т.е. в качестве сигнала движения.
Приведенное решение также позволяет формировать сигнал движения таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, вносил наибольший вклад в сигнал движения.
В предпочтительном варианте, для выполнения анализа независимых компонент сигналов акселерометра применяют алгоритм, который использует временную корреляцию сигналов, например, так называемый, алгоритм SOBI (слепой идентификации по статистикам второго порядка). Алгоритм SOBI описан в статье «A blind source separation technique using second order statistics», Belouchrani A. et al, IEEE Trans Signal Process, 45(2): 434-444, Feb 1997, которая включена в настоящую заявку путем отсылки.
Компоненту движения из независимых компонент, получаемых в результате применения анализа независимых компонент, которая показывает движение, подлежащее определению, можно определить посредством определения независимой компоненты, имеющей максимальную амплитуду на предварительно заданной частоте. Например, если по сигналу движения следует определить частоту дыхания или частоту сердечных сокращений, то в качестве компоненты движения определяется независимая компонента, имеющая максимальную амплитуду в частотном интервале, который соответствует возможным частотам дыхания или частотам сердечных сокращений.
В предпочтительном варианте, устройство определения движения содержит несколько многоосевых акселерометров для размещения на объекте во взаимно дополняющих положениях, при этом блок формирования сигнала движения выполнен с возможностью формирования сигнала движения, показывающего движение объекта посредством комбинирования сигналов акселерометров по разным пространственным осям нескольких многоосевых акселерометров.
Приведенное решение допускает дополнительное повышение отношения сигнала к шуму и дополнительное снижение вероятности невыполнения определения движения объекта. В предпочтительном варианте, два положения объекта считаются взаимно дополняющими, если движения в упомянутых двух положениях различаются, в частности, если вызываемые движением изменения относительно направления силы тяжести различаются в упомянутых двух положениях. В частности, два положения на объекте считаются взаимно дополняющими, если движения, вызываемые дыханием или сердечной деятельностью, различаются в данных положениях, особенно, если изменения, вызываемые дыханием, или изменения, вызываемые сердечной деятельностью, относительно направления силы тяжести различаются в данных двух положениях.
Если устройство определения движения содержит несколько многоосевых акселерометров, то блок формирования сигнала движения, предпочтительно, выполнен с возможностью формирования сигнала движения посредством комбинирования сигналов акселерометров по разным пространственным осям из нескольких многоосевых акселерометров, с использованием анализа главных компонент или анализа независимых компонент.
В предпочтительном варианте, на объекте размещают два многоосевых акселерометра, в частности, на объекте размещают, предпочтительно, два трехосевых акселерометра. Первый акселерометр размещают, предпочтительно, как пояснялось выше, например, на нижних ребрах, и второй акселерометр размещают, предпочтительно, по центру на верхней части грудной клетки, например на грудине.
В соответствии с дополнительным аспектом настоящего изобретения, предлагается способ определения движения для определения движения подвижного объекта, при этом способ определения движения содержит следующие этапы:
- формируют сигналы акселерометра, показывающие ускорение вдоль разных пространственных осей, посредством многоосевого акселерометра, размещенного на подвижном объекте,
- формируют сигнал движения, показывающий движение объекта, посредством комбинирования сигналов акселерометра по разным пространственным осям посредством блока формирования сигнала движения, причем блок формирования сигнала движения линейно комбинирует сигналы акселерометра по разным пространственным осям, причем сигналы акселерометра взвешивают таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, имел наибольший вес.
В соответствии с дополнительным аспектом настоящего изобретения, предлагается компьютерная программа для определения движения подвижного объекта, при этом компьютерная программа содержит средство управляющей программы для приведения устройства определения движения по п.1 формулы изобретения к выполнению этапов способа определения движения по п.12 формулы изобретения, когда компьютерную программу исполняют в компьютере, управляющим устройством определения движения.
Следует понимать, что устройство определения движения по п.1 формулы изобретения, способ определения движения по п.12 формулы изобретения и компьютерная программа по п.13 формулы изобретения имеют аналогичные и/или идентичные предпочтительные варианты осуществления, в частности, определенные в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения может быть также любой комбинаций зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Приведенные и другие аспекты настоящего изобретения будут очевидны из пояснения на примере нижеописанного(ных) варианта(ов) осуществления. На нижеприведенных чертежах:
Фиг.1 - схематическое примерное представление варианта осуществления устройства определения движения,
Фиг.2 - пример трех сигналов акселерометра и сигнала движения, сформированного посредством комбинирования сигналов акселерометра до изменения позы объекта,
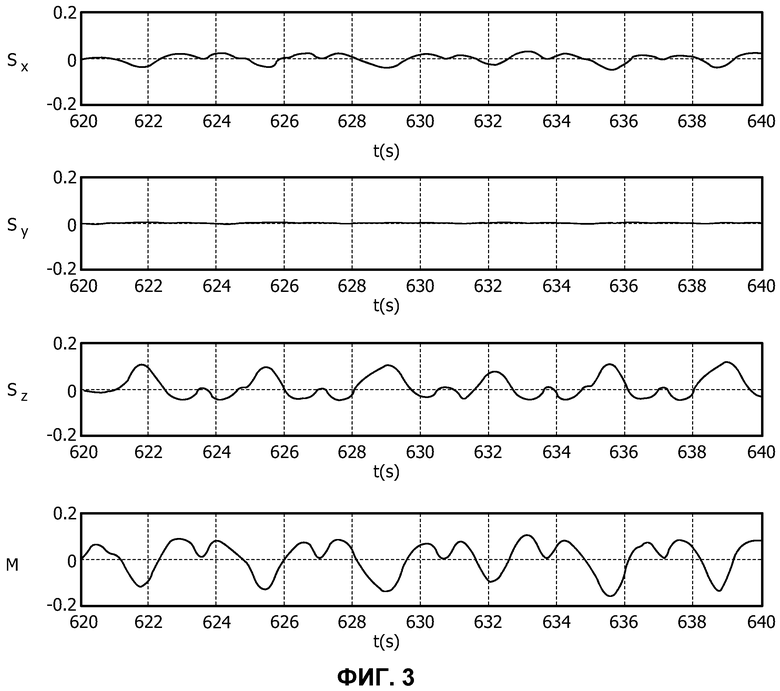
Фиг.3 - пример трех сигналов акселерометра и сигнала движения, сформированного посредством комбинирования трех сигналов акселерометра после изменения позы объекта,
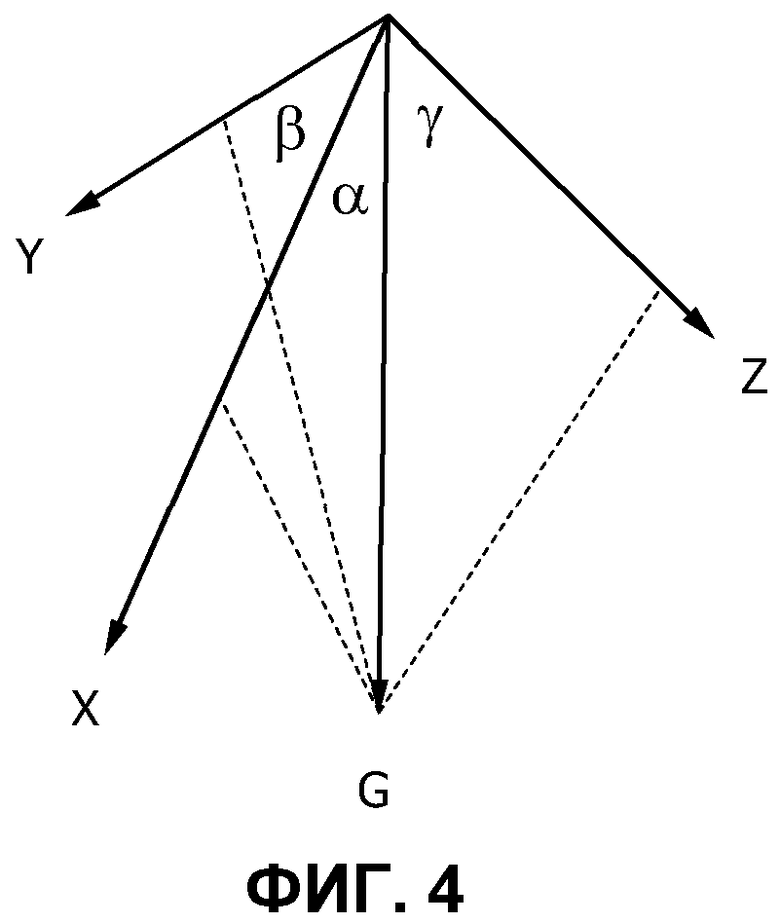
Фиг.4 - пространственное расположение гравитационного вектора и разных пространственных осей акселерометра,
Фиг.5 - перемещение гравитационного вектора относительно разных пространственных осей акселерометра,
Фиг.6 - подпространство одной из разных пространственных осей акселерометра,
Фиг.7 - дополнительный вариант осуществления устройства определения движения, и
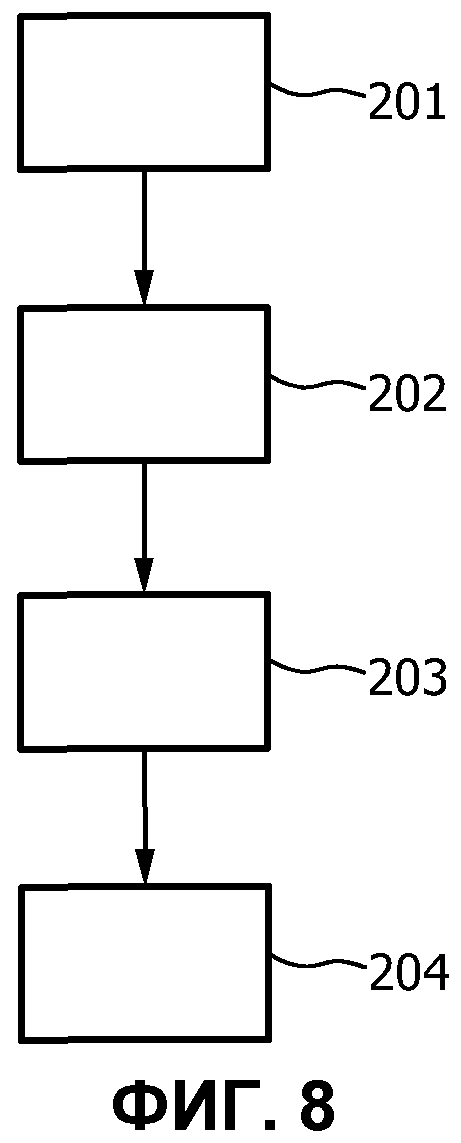
Фиг.8 - блок-схема последовательности операций примерного варианта осуществления способа определения движения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На фиг.1 схематично представлен пример варианта осуществления устройства определения движения для определения движения подвижного объекта. Устройство 1 определения движения содержит многоосевой акселерометр 2 для размещения на подвижном объекте 4. Многоосевой акселерометр 2 выполнен с возможностью формирования сигналов акселерометра, показывающих ускорение вдоль разных пространственных осей. В изображенном варианте осуществления, многоосевой акселерометр является трехосевым акселерометром, выполненным с возможностью формирования трех сигналов акселерометра, показывающих ускорение по трем ортогональным пространственным осям. Например, можно воспользоваться трехосевыми акселерометрами марок ST Microelectronics LIS344ALH или Kionix KXM52. Однако, многоосевые акселерометры других типов также применимы для формирования сигналов акселерометра, показывающих ускорение по трем разным пространственным осям.
Устройство 1 определения движения дополнительно содержит блок 3 формирования сигнала движения для формирования сигнала движения, показывающего движение объекта 4, посредством комбинирования сигналов акселерометра по разным пространственным осям. В приведенном варианте осуществления, блок 3 формирования сигнала движения выполнен с возможностью комбинирования трех сигналов акселерометра трехосевого акселерометра 2 для формирования сигнала движения, показывающего движение объекта 4.
В приведенном варианте осуществления, объект 4 является телом 4 человека, при этом многоосевой акселерометр 2 размещен на теле 4 человека, при этом блок 3 формирования сигнала движения выполнен с возможностью формирования сигнала движения, показывающего, по меньшей мере, что-то одно из дыхания и сердечной деятельности человека.
Многоосевой акселерометр 2 размещен на левых нижних ребрах, приблизительно, на половине расстояния между центральным и боковым положением. Однако многоосевой акселерометр 2 можно размещать также в других положениях, например на животе, в частности, если действуют ограничения из-за физических данных тела, например послеоперационных ран.
Устройство 1 определения движения дополнительно содержит блок 7 фильтрации для фильтрации сигналов акселерометра таким образом, чтобы через блок 7 фильтрации проходили частоты, соответствующие возможным частотам движения, подлежащего определению. Данное решение ослабляет шум и возможные дополнительные нежелательные воздействия окружающей среды на сигналы акселерометра. В приведенном варианте осуществления, сигнал движения должен показывать частоту дыхания или сердечных сокращений. Поэтому блок 7 фильтрации выполнен с возможностью фильтрации сигнала акселерометра таким образом, чтобы через блок фильтрации проходили частоты, соответствующие возможным частотам дыхательного движения или движения, вызываемого сердечной деятельностью. В частности, блок 7 фильтрации может быть выполнен с возможностью фильтрации частот в диапазоне частот 0,1-3 Гц. Возможен также вариант, в котором для определения дыхания фильтруются, т.е. пропускаются через блок 7 фильтрации, частоты в диапазоне частот 0,1-2 Гц, и для определения частоты сердечных сокращений фильтруются частоты в диапазоне частот 0,5-3 Гц.
Устройство определения движения дополнительно содержит блок 5 определения частоты дыхания для определения частоты дыхания в зависимости от сформированного сигнала движения и блок 6 определения частоты сердечных сокращений для определения частоты сердечных сокращений в зависимости от сформированного сигнала движения. Если блок 7 фильтрации выполнен с возможностью фильтрации сигналов акселерометра первым фильтром для фильтрации сигналов акселерометра для определения дыхания, и если блок 7 фильтрации выполнен с возможностью фильтрации сигналов акселерометра вторым фильтром для фильтрации сигналов акселерометра для определения частоты сердечных сокращений, то сигналы акселерометра, фильтруемые первым фильтром, комбинируются, предпочтительно, отдельно от сигналов акселерометра, фильтруемых вторым фильтром, при этом сигнал движения, формируемый посредством комбинирования сигналов акселерометра, фильтруемых первым фильтром, подается в блок 5 определения частоты дыхания, и сигнал движения, формируемый посредством комбинирования сигналов акселерометра, фильтруемых вторым фильтром, подается в блок 6 определения частоты сердечных сокращений.
В предпочтительном варианте осуществления, частота дыхания определяется блоком 5 определения частоты дыхания в форме основной частоты сигнала движения, подаваемого в блок 5 определения частоты дыхания. В предпочтительном варианте, частота сердечных сокращений определяется посредством определения основной частоты сигнала движения, подаваемого в блок 6 определения частоты сердечных сокращений.
В дополнительном предпочтительном варианте осуществления, частота дыхания определяется блоком 5 определения частоты дыхания в виде величины, обратной временному интервалу между последовательными максимумами сигнала движения. Максимумы сигнала движения можно определять идентификацией переходов через нуль первой производной сигнала движения. Чтобы исключить обнаружение ложных максимумов, на максимумы можно налагать дополнительные ограничения. Например, для определения частоты дыхания используют только такие максимумы сигнала движения, которые превышают порог. Порог можно определять, например, калибровкой.
Блок 3 формирования сигнала движения выполнен с возможностью циклического формирования сигнала движения на основании сигналов акселерометра, сформированных в течение предшествующего во времени временного интервала. Приведенное решение позволяет адаптировать комбинацию сигналов акселерометра к фактическим условиям, например фактической ориентации осей многоосевого акселерометра. Приведенное решение допускает, например, определение сигнала движения, показывающего, по меньшей мере, что-то одно из дыхания и сердечной деятельности человека, даже если человек изменяет свою позу. Временной интервал составляет, предпочтительно, не более 20 секунд, предпочтительнее, не более 10 секунд, и, в еще более предпочтительном варианте, не более 5 секунд.
Блок 3 формирования сигнала движения выполнен с возможностью комбинирования сигналов акселерометра таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, вносил наибольший вклад в сигнал движения. В данном варианте осуществления, блок 3 формирования сигнала движения выполнен с возможностью выполнения анализа главных компонент сигналов акселерометра по разным пространственным осям, при этом получаемая первая главная компонента является сформированным сигналом движения.
Эффект комбинирования трех сигналов акселерометра, в частности, посредством выполнения анализа главных компонент, для формирования сигнала движения описан ниже со ссылкой на фиг.2 и 3.
На фиг.2 схематично представлен пример сигналов S x, S y, S z акселерометра в произвольных единицах в зависимости от времени t в секундах. Вследствие ориентации трехосевого акселерометра относительно движения, подлежащего определению, сигнал S x акселерометра демонстрирует наибольшие изменения, вызываемые движениями человека в положении, в котором расположен трехосевой акселерометр 2, а сигнал S z акселерометра проявляет лишь незначительные изменения. Комбинирование приведенных сигналов S x, S y, S z акселерометра дает сигнал движения M, демонстрирующий относительно большие изменения и, поэтому, характеризуется относительно высоким отношением сигнала к шуму.
На фиг.3 показаны те же сигналы акселерометра после того, как изменена поза человека 4. После упомянутого изменения позы, сигнал S z акселерометра демонстрирует наибольшие изменения, а сигнал S y акселерометра испытывает незначительные изменения. Однако, благодаря комбинированию трех сигналов акселерометра, выполняемому блоком 3 формирования сигнала движения, формируется сигнал M движения, который, по прежнему, демонстрирует относительно большие изменения, и который по-прежнему характеризуется относительно высоким отношением сигнала к шуму. Таким образом, даже после того, как поза человека изменилась, сформированный сигнал движения по-прежнему демонстрирует большие изменения и характеризуется высоким отношением сигнала к шуму. На фиг.2 и 3 показаны колебания или флуктуации сигнала с периодом, приблизительно, четыре секунды, вызванные дыханием. Таким образом, по сигналу движения, показанному на фиг.2 и 3, можно определить, что частота дыхания составляет 15 вдохов в минуту.
В дополнительном предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью линейного комбинирования сигналов акселерометра по разным пространственным осям, при этом сигналы акселерометра взвешиваются таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, имел наибольший вес. Например, блок формирования сигнала движения может быть выполнен с возможностью определения веса сигнала акселерометра в зависимости от корреляции соответствующего сигнала акселерометра с сигналом акселерометра, характеризующегося максимальным изменением ускорения, при этом вес соответствующего сигнала акселерометра повышается, если соответствующая корреляция оказывается выше.
В предпочтительном варианте, корреляцию определяют посредством определения «коэффициента выборочной корреляции» или «коэффициента корреляции по смешанным моментам Пирсона».
Формирование сигнала M движения посредством линейного комбинирования сигналов S x, S y, S z акселерометра можно описать следующим уравнением:
M=w x S x+w y S y+w z S z, (1)
где w x, w y, w z обозначают соответствующие веса.
В предпочтительном варианте, весовые коэффициенты w x, w y, w z определяют таким образом, чтобы сигнал движения обладал максимальным отношением сигнала к шуму. Данные весовые коэффициенты зависят от ориентации акселерометра, в частности, от позы человека, на котором закреплен многоосевой акселерометр, вследствие чего, в предпочтительном варианте, весовые коэффициенты w x, w y, w z периодически обновляются. Весовые коэффициенты вычисляются в периодические следующие моменты времени, например, через каждую секунду, на основании сигналов акселерометра в некоторый предшествующий временной интервал, который составляет, предпочтительно, не более 20 секунд. В предпочтительном варианте, блок формирования сигнала движения выполнен с возможностью линейной интерполяции весовых коэффициентов, которые были определены в первый момент времени, и весовых коэффициентов, которые были определены во второй момент времени, если весовые коэффициенты изменились между упомянутыми двумя моментами времени, чтобы обеспечивать плавную форму колебания сигнала движения.
В предпочтительном варианте осуществления, весовые коэффициенты равны +1 или -1, в соответствии с фазовым соотношением между сигналами акселерометра. В предпочтительном варианте, знак определяется на основании коэффициента корреляции между опорной осью и двумя другими осями, например, если опорной осью является x-ось, то весовые коэффициенты, предпочтительно, определяются следующими уравнениями:
w x=1, (2)
w y=sign(C(S x , S y)), (3)
w z=sign(C(S x , S z)), (4)
где sign(…) является знаковой функцией и где C(…) означает коэффициент корреляции между соответствующими сигналами акселерометра. В предпочтительном варианте, опорной осью считается ось акселерометра, характеризующаяся сигналом акселерометра с максимальной амплитудой в частотном диапазоне, который соответствует возможным частотам движения, подлежащего определению.
Первая главная компонента, определяемая посредством выполнения анализа главных компонент трех сигналов акселерометра, также может рассматриваться как линейная комбинация трех сигналов акселерометра, так как анализ главных компонент является ортогональным линейным преобразованием, в частности поворотом, который разлагает три сигнала акселерометра в линейную смесь некоррелированных компонент, так называемых, главных компонент. Главные компоненты получают разложением по собственным значениям ковариационной матрицы трех сигналов акселерометра. Первая главная компонента является линейной комбинацией трех сигналов акселерометра, на которую приходится максимальная дисперсия сигналов акселерометра. Если, например, дыхание является самым мощным источником дисперсии сигналов акселерометра, то выполнение анализа главных компонент трех сигналов акселерометра формирует первую главную компоненту, являющуюся комбинацией трех сигналов акселерометра, которая максимизирует сигнал движения, вызванный дыханием. Для закрепления за дыханием функции самого мощного источника дисперсии сигналов акселерометра, сигналы акселерометра можно фильтровать блоком 7 фильтрации таким образом, чтобы сигналы акселерометра были ограничены диапазоном частот, соответствующей частоте дыхания, которая является физиологически возможной, например, диапазоном частот 0,1-2 Гц, которая соответствует 6-120 вдохам в минуту.
В дополнительном варианте осуществления, блок 3 формирования сигнала движения выполнен с возможностью выполнения анализа независимых компонент сигналов акселерометра по разным пространственным осям и с возможностью определения компоненты движения из независимых компонент, получаемых в результате выполнения анализа независимых компонент, которая показывает движение, подлежащее определению, в качестве сигнала движения.
Анализ независимых компонент можно рассматривать как расширение анализа главных компонент, который находит линейную комбинацию сигналов акселерометра, которые являются не только некоррелированными, но также статистически независимыми. С упомянутой целью, алгоритмы анализа независимых компонент используют дополнительную информацию, не содержащуюся в ковариационной матрице, обычно, статистики высших порядков. Поскольку сигнал движения, подлежащий определению, в частности сигнал движения, вызываемый дыханием и/или сердечной деятельностью, является коррелированным по времени, то, в предпочтительном варианте, для выполнения анализа независимых компонент применяют алгоритм SOBI (слепой идентификации по статистикам второго порядка), так как алгоритм SOBI использует временную структуру сигналов акселерометра. Алгоритм SOBI основан на одновременной диагонализации набора ковариационных матриц с разными запаздываниями по времени. В противоположность анализу главных компонент, независимые компоненты, полученные методом анализа независимых компонент, не упорядочиваются в соответствии с дисперсией. Таким образом, даже если дыхание и/или сердечная деятельность объясняют максимальную дисперсию сигналов акселерометра, независимая компонента, связанная с частотой дыхания и/или сердечных сокращений, не обязательно является первой компонентой. Поэтому, блок формирования сигнала движения выполнен с возможностью определения независимой компоненты, которая показывает движение, подлежащее определению, в качестве сигнала движения.
Блок формирования сигнала движения может быть выполнен с возможностью определения компоненты движения из независимых компонент, полученных в результате выполнения анализа независимых компонент, которая показывает движение, подлежащее определению, посредством определения независимой компоненты, имеющей максимальную амплитуду на предварительно заданной частоте, которая характерна для движения, подлежащего определению. Например, если по сигналу движения следует определить частоту дыхания или частоту сердечных сокращений, то в качестве компоненты движения определяется независимая компонента, энергетический спектр которой имеет наибольший максимум в частотном интервале, который соответствует возможным частотам дыхания или возможным частотам сердечных сокращений, соответственно.
В дополнительном варианте осуществления, независимую компоненту, которая показывает движение, можно определить на основании количественного показателя (Score), который учитывает дополнительные признаки. В таком случае, независимая компонента с минимальным количественным показателем выбирается в качестве независимой компоненты, которая показывает движение. Например, количественный показатель можно вычислять как сумму числа признаков независимых компонент:
 (5)
(5)
где Score(IC x) означает количественный показатель x-й независимой компоненты, N означает число признаков, которые используют, F i(IC x) является значением i-го признака для x-й независимой компоненты, и w i означает вес, соответствующий i-му признаку. Предпочтительные признаки основаны, например, на основной частоте независимой компоненты, весах смешения независимой компоненты, спектральной форме независимой компоненты и так далее. Так как изменения дыхания, частоты сердечных сокращений и позы, обычно, происходят со временем постепенно, то можно использовать признаки, которые учитывают знание о дыхании, частоте сердечных сокращений и/или позе в течение предшествующего временного интервала. Например, в качестве признака можно использовать абсолютную разность основной частоты независимой компоненты и основной частоты сигнала движения в течение предшествующего временного интервала. В течение первого временного интервала, для которого выполняется анализ, выбор независимой компоненты, которая показывает движение, может быть основан (1) только на таких признаках, которые не учитывают знание о предыдущих временных интервалах, или (2) на оценке исходных значений для признаков предыдущих данных.
В одном варианте осуществления, вышеописанные способы определения независимой компоненты, которая показывает движение, подлежащее определению, в качестве сигнала движения, можно также применить для определения главной компоненты, полученной в результате анализа главных компонент, которая показывает движение, подлежащее определению, в качестве сигнала движения.
В дополнительном варианте осуществления, блок 3 формирования сигнала движения выполнен с возможностью определения для каждой пространственной оси акселерометра максимизированный проецированный сигнал изменения ускорения и с возможностью формирования сигнала движения посредством комбинирования максимизированных проецированных сигналов, при этом блок формирования сигнала движения выполнен с возможностью определения максимизированного проецированного сигнала по пространственной оси акселерометра посредством проецирования перемещения гравитационного вектора относительно пространственных осей акселерометра на подпространство, заданное номинальным гравитационным вектором и соответствующей пространственной осью акселерометра, и посредством такого преобразования соответствующей оси внутри подпространства, чтобы максимизировать проекцию спроецированного перемещения гравитационного вектора, который был спроецирован на подпространство, на преобразованную соответствующую ось.
Поскольку инерциальное ускорение, обусловленное перемещением, например, обусловленное дыханием или сердечной деятельностью, намного меньше, чем гравитационное ускорение, то оси, в частности, три ортогональные оси акселерометра, представляют проекции гравитационного вектора на каждую ось x, y, z. Данное положение поясняется примером, приведенным на фиг.4.
Значение по каждой оси x, y, z акселерометра является проекцией гравитационного вектора на соответствующую ось. Упомянутые значения определяются углами между гравитационным вектором и соответствующей осью, т.е. соответственно углами α, β, γ и следующими уравнениями:
S x=G∙cosα, (6)
S y=G∙cosβ, (7)
S z=G∙cosγ, (8)
где G означает абсолютное значение гравитационного вектора.
Если предположить, что движение акселерометра, обусловленное, например, дыханием или сердечной деятельностью, происходит в плоскости, то упомянутое перемещение можно представить в системе координат датчика в виде перемещения вперед и назад гравитационного вектора G относительно номинального местоположения в произвольной плоскости 8. Данное предположение поясняется примером, приведенным на фиг.5. На фиг.5, Δφ обозначает полный размах угла с каждой стороны от номинального местоположения гравитационного вектора G.
Для каждой пространственной оси x, y, z, вектором G и соответствующей пространственной осью x, y, z задано подпространство, т.е. двумерная плоскость. Пример данного подпространства 9 схематично представлен на фиг.6 для z-оси. На фиг.6, γ означает угол между гравитационным вектором в номинальном местоположении и соответствующей пространственной осью акселерометра, и  является векторной суммой x-координаты и y-координаты гравитационного вектора, т.е. векторной суммой S
x и S
y.
является векторной суммой x-координаты и y-координаты гравитационного вектора, т.е. векторной суммой S
x и S
y.
Для каждой упомянутой пространственной оси, перемещение гравитационного вектора сначала проецируется на соответствующее подпространство, заданное соответствующей пространственной осью и номинальным местоположением гравитационного вектора. Затем, в данном подпространстве, z-ось поворачивают так, чтобы максимизировать изменение амплитуды, обусловленное перемещением гравитационного вектора, на данной новой z-оси.
В номинальном местоположении, проекция гравитационного вектора на повернутую ось можно записать в виде:
 (9)
(9)
В своем крайнем положении, проекция гравитационного вектора на повернутую ось можно записать в виде:
 (10)
(10)
где Δγ означает размах угла с каждой стороны от номинального местоположения гравитационного вектора в соответствующем подпространстве, γ означает номинальное значение γ.
Объединение уравнений (9) и (10) по формулам тригонометрического суммирования показывает, что полученная амплитуда повернутой проекции гравитационного вектора зависит от размаха Δγ угла:
 (11)
(11)
Член «sin(Δγ)» является максимизированной проекцией изменения ускорения в подпространстве, т.е. перемещения, которое, в предпочтительном варианте, вызвано дыханием или сердечной деятельностью. Чтобы определить максимизированный проецированный сигнал, т.е., чтобы определить G·sin(Δγ), с использованием уравнения (9), требуется определить sinγ или cosγ. Значение cosγ и, следовательно, также значение sinγ можно определить в соответствии со следующим уравнением:
 (12)
(12)
где mean(S z) означает среднюю величину сигнала акселерометра по z-оси во временном интервале, например, не более 20 секунд, при этом mean(max(S z)) является средней величиной максимальной амплитуды сигнала S z акселерометра по z-оси, и mean(min(S z)) является средней величиной минимальной амплитуды сигнала S z акселерометра по z-оси. Уравнение (12) выводится с использованием разложения в ряд Тейлора проекции идеального сигнала перемещения.
Вышеописанное определение максимизированного проецированного сигнала для z-оси соответственно выполняется для других осей, т.е. для x-оси и y-оси, чтобы получить, для каждой пространственной оси акселерометра, максимизированный проецированный сигнал.
В приведенном варианте осуществления, блок формирования сигнала движения выполнен с возможностью комбинирования максимизированных проецированных сигналов P max,x, P max,y, P max,z по трем пространственным осям x, y, z для формирования сигнала движения. Блок формирования сигнала движения может быть выполнен с возможностью выполнения упомянутого комбинирования с использованием метода анализа главных компонент, при этом первая главная компонента является сформированным сигналом движения. Блок 3 формирования сигнала движения может быть также выполнен с возможностью определения модуля вектора трех максимизированных проецированных сигналов для формирования сигнала движения. В предпочтительном варианте, упомянутое определение модуля вектора выполняется в соответствии со следующим уравнением:
 (13)
(13)
где sign(…) представляет знаковую функцию, P max,imax означает такую максимизированную проекцию, которая характеризуется максимальной амплитудой сигнала движения, т.е., индекс imax обозначает максимизированную проекцию, имеющую максимальную амплитуду сигнала, т.е. x, y или z.
На фиг.7 представлен дополнительный вариант осуществления устройства определения движения, содержащего несколько многоосевых акселерометров 2, 10, в частности два трехосевых акселерометра, для размещения на человеке 4 во взаимно дополняющих положениях, при этом блок 7 фильтрации выполнен с возможностью фильтрации сигналов акселерометров упомянутых многоосевых акселерометров 2, 10, причем блок формирования сигнала движения выполнен с возможностью формирования сигнала движения, показывающего движение человека 4, в частности, показывающего движение, вызванное дыханием и/или сердечной деятельностью человека 4, посредством комбинирования сигналов акселерометров по разным пространственным осям нескольких многоосевых акселерометров 2, 10. В данном варианте осуществления, блок формирования сигнала движения, предпочтительно, выполнен с возможностью формирования сигнала движения посредством комбинирования сигналов акселерометров по разным пространственным осям нескольких многоосевых акселерометров 2, 10, с использованием вышеописанного метода анализа главных компонент или вышеописанного метода анализа независимых компонент. В частности, каждый трехосевой акселерометр 2, 10 формирует три ортогональных сигнала акселерометра, т.е. формируется шесть сигналов акселерометров, при этом анализ главных компонент или анализ независимых компонент применяется к данным шести сигналам акселерометров.
Первый акселерометр 2 размещен на левых нижних ребрах, и второй акселерометр 10 размещен по центру на верхней части грудной клетки, например на грудине.
В дальнейшем приведено описание примерного способа определения движения для определения движения подвижного объекта со ссылкой на блок-схему последовательности операций способа, представленную на фиг.8.
На этапе 201 сигналы акселерометра, показывающие ускорение вдоль разных пространственных осей, формируются многоосевым акселерометром, размещенным на человеке 4. На этапе 202 блок 7 фильтрации фильтрует сформированные сигналы акселерометра, и на этапе 203 блок формирования сигнала движения формирует сигнал движения, показывающий движение человека 4, посредством комбинирования сигналов акселерометра по разным пространственным осям, в частности, формируется сигнал движения, показывающий движение, вызываемое дыханием и/или сердечной деятельностью.
На этапе 204 в блоке 5 определения частоты дыхания определяется частота дыхания, и/или в блоке 6 определения частоты сердечных сокращений определяется частота сердечных сокращений в зависимости от сформированного сигнала движения.
Устройство определения движения содержит, по меньшей мере, один многоосевой акселерометр, который, предпочтительно, размещают на груди и/или животе человека, чтобы контролировать частоту дыхания и/или сердечных сокращений, в частности, в амбулаторных условиях. В отличие от известных акселерометрических систем контроля дыхания, которые работают с данными акселерометра по единственной оси, устройство определения движения в соответствии с настоящим изобретением одновременно использует сигналы акселерометра по разным пространственным осям. Приведенное решение особенно полезно в амбулаторных условиях, когда ориентация акселерометра изменяется не только вследствие дыхания или сердечной деятельности, но также вследствие изменений поз и перемещения пациента.
Многоосевой акселерометр применяют как наклономер для отражения перемещения объекта, в частности, для отражения перемещения живота или груди, вызываемого дыханием и/или сердечной деятельностью. Перемещение отражается изменением наклона поверхности объекта, на которой размещен многоосевой акселерометр. По нескольким пространственным осям многоосевого акселерометра, которые являются, предпочтительно, тремя ортогональными осями, записываются сигналы акселерометра, равные проекции гравитационного вектора на каждую из упомянутых осей. Поскольку компоненты S x, S y, S z гравитационного вектора определяются углами между гравитационным вектором и каждой соответствующей осью, то изменение наклона акселерометра, вызываемое перемещением объекта, может отражаться в виде изменения сигналов S x, S y, S z акселерометра, при этом предполагается, что дополнительное внешнее ускорение объекта, которое также может вносить вклад в сигналы S x, S y, S z акселерометра, является незначительным, в сравнении с силой тяжести. Приведенное предположение имеет силу, по меньшей мере, в ситуациях, в которых сигнал движения, показывающий движение, вызываемое дыханием и/или сердечной деятельностью, должен формироваться в амбулаторных условиях.
Устройство определения движения можно применять для контроля пациента, в частности, для содействия определению острых стадий заболевания пациентов вне помещений интенсивной терапии.
Устройство определения движения оптимально и автоматически формирует комбинацию сигналов акселерометра по разным пространственным осям таким образом, что отношение сигнала к шуму для сигнала движения, который, в предпочтительном варианте, используется для определения частоты дыхания и/или частоты сердечных сокращений, имеет оптимизированное значение отношения сигнала к шуму. В частности, устройство определения движения позволяет автоматически отслеживать оптимальную комбинацию сигналов акселерометра по разным пространственным осям, даже если изменяется поза объекта, например поза подконтрольного человека. В частности, амплитуда сформированного сигнала движения, в общем, больше, чем амплитуда каждого из сигналов акселерометра по разным пространственным осям акселерометра. В предпочтительном варианте, устройство определения движения применяют в обстановке, когда частоту дыхания и/или сердечных сокращений контролируют в амбулаторных условиях, с использованием, по меньшей мере, одного многоосевого акселерометра.
Шум по разным пространственным осям является, в общем, не коррелированным, а сигнал движения является, в общем, коррелированным. При комбинировании сигналов акселерометра по разным пространственным осям для формирования сигнала движения, можно повысить отношение сигнала к шуму. В частности, блок формирования сигнала движения выполнен, предпочтительно, таким образом, чтобы отношение изменений, вызванных движением, к изменениям, обусловленным шумами, было, по меньшей мере, таким же высоким, как по отдельной пространственной оси, которая характеризуется максимальным отношением изменений, вызванных движением, к изменениям, обусловленным шумами, независимо от ориентации объекта и перемещения.
Хотя в вышеописанных вариантах осуществления многоосевой акселерометр содержит, предпочтительно, три ортогональные оси, многоосевой акселерометр может также содержать две ортогональные оси или больше трех осей. Кроме того, пространственная ось может также образовывать другой угол, т.е., в другом варианте осуществления, оси могут быть неортогональными.
Хотя в вышеописанных вариантах осуществления применяются один или два многоосевых акселерометра, возможен также вариант с применением, по меньшей мере, трех акселерометров для определения движения объекта, в частности, для определения сигнала движения, показывающего движение объекта и для определения частоты дыхания и/или частоты сердечных сокращений в зависимости от определяемого сигнала движения.
В процессе практического применения заявленного изобретения, специалистами в данной области техники, после изучения чертежей, описания и прилагаемой формулы изобретения, могут быть разработаны и исполнены другие разновидности предложенных вариантов осуществления.
В формуле изобретения формулировка «содержащий» не исключает другие элементы или этапы и неопределенный артикль не исключает смысла множественного числа.
Один блок или одно устройство может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Очевидное обстоятельство, что некоторые средства упоминаются во взаимно отличающихся зависимых пунктах формулы изобретения, не означает невозможности применения, в подходящем случае, комбинации упомянутых средств.
Определения типа определения сигнала движения, частоты дыхания или частоты сердечных сокращений и фильтрация сигналов акселерометра, выполняемые одним или несколькими блоками или устройствами, могут выполняться любым другим числом блоков или устройств. Например, определение сигнала движения и определение частоты дыхания и/или частоты сердечных сокращений в зависимости от сигнала движения могут выполняться единственным блоком или любым другим числом разных блоков. Определения, и/или фильтрация, и/или управление устройством определения движения в соответствии со способом определения движения могут быть реализованы в форме средства управляющей программы компьютерной программы и/или в форме специализированной аппаратуры.
Компьютерная программа может храниться/распространяться на подходящем носителе, например оптическом носителе данных или твердотельном носителе, поставляемом совместно с другой аппаратурой или в ее составе, но может также распространяться в других формах, например по сети Internet или в других проводных или беспроводных телекоммуникационных системах.
Никакие позиции в формуле изобретения не подлежат истолкованию в смысле ограничения объема притязаний.





Группа изобретений относится к медицине. Способ определения дыхания и/или сердечной деятельности человека реализуют устройством определения движения. При этом размещают многоосевой акселерометр на теле человека. Формируют сигналы акселерометра, показывающие ускорение вдоль разных пространственных осей. Посредством блока формирования сигнала движения формируют сигнал движения путем линейного комбинирования сигналов акселерометра по разным пространственным осям. Сигнал движения показывает дыхание и/или сердечную деятельность человека. Сигналы акселерометра взвешивают таким образом, чтобы наибольший вес имел сигнал акселерометра, характеризующийся максимальным изменением ускорения. Блок формирования сигнала движения определяет вес сигнала акселерометра в зависимости от корреляции соответствующего сигнала акселерометра с сигналом акселерометра, характеризующимся максимальным изменением ускорения. Вес соответствующего сигнала акселерометра является знаком корреляции. Применение группы изобретений позволит повысить качество сигнала движения, имеющего высокое отношение сигнала к шуму. 3 н. и 8 з.п. ф-лы, 8 ил.
1. Устройство определения движения для определения, по меньшей мере, одного из дыхания и сердечной деятельности человека, при этом устройство (1) определения движения содержит:
- многоосевой акселерометр (2) для размещения на теле человека (4), причем многоосевой акселерометр (2) выполнен с возможностью формирования сигналов акселерометра, показывающих ускорение вдоль разных пространственных осей,
- блок (3) формирования сигнала движения для формирования сигнала движения, показывающего, по меньшей мере, одно из дыхания и сердечной деятельности человека, посредством комбинирования сигналов акселерометра по разным пространственным осям,
причем блок (3) формирования сигнала движения выполнен с возможностью линейного комбинирования сигналов акселерометра по разным пространственным осям, причем сигналы акселерометра взвешиваются таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, имел наибольший вес, и
блок (3) формирования сигнала движения выполнен с возможностью определения веса сигнала акселерометра в зависимости от корреляции соответствующего сигнала акселерометра с сигналом акселерометра, характеризующимся максимальным изменением ускорения, при этом вес соответствующего сигнала акселерометра является знаком корреляции.
2. Устройство определения движения по п. 1, в котором устройство (1) определения движения дополнительно содержит, по меньшей мере, один из блока (5) определения частоты дыхания для определения частоты дыхания и блока (6) определения частоты сердечных сокращений для определения частоты сердечных сокращений в зависимости от сформированного сигнала движения.
3. Устройство определения движения по п. 1, в котором устройство (1) определения движения дополнительно содержит блок (7) фильтрации для фильтрации сигналов акселерометра таким образом, чтобы через блок (7) фильтрации проходили частоты, соответствующие возможным частотам движения, подлежащего определению.
4. Устройство определения движения по п. 1, в котором блок (3) формирования сигнала движения выполнен с возможностью циклического формирования сигнала движения на основании сигналов акселерометра, сформированных в течение предшествующего во времени временного интервала.
5. Устройство определения движения по п. 1, в котором блок (3) формирования сигнала движения выполнен с возможностью выполнения анализа главных компонент сигналов акселерометра по разным пространственным осям и с возможностью определения компоненты движения из главных компонент, получаемых в результате применения анализа главных компонент, которая показывает, по меньшей мере, одно из дыхания и сердечной деятельности человека, подлежащее определению, в качестве сигнала движения.
6. Устройство определения движения по п. 1, в котором блок (3) формирования сигнала движения выполнен с возможностью определения, для каждой пространственной оси акселерометра, максимизированного проецированного сигнала изменения ускорения и с возможностью формирования сигнала движения посредством комбинирования максимизированных проецированных сигналов, при этом блок формирования сигнала движения выполнен с возможностью определения максимизированного проецированного сигнала по пространственной оси акселерометра посредством проецирования перемещения гравитационного вектора относительно пространственных осей акселерометра на подпространство, заданное номинальным гравитационным вектором и соответствующей пространственной осью акселерометра, и посредством такого преобразования соответствующей оси внутри подпространства, чтобы проекция спроецированного перемещения гравитационного вектора, который был спроецирован на подпространство, на преобразованную соответствующую ось достигала максимума.
7. Устройство определения движения по п. 6, в котором блок (3) формирования сигнала движения выполнен с возможностью формирования сигнала движения посредством определения модуля вектора максимизированных проецированных сигналов и посредством комбинирования полученного модуля вектора со знаком, по меньшей мере, одного из максимизированных проецированных сигналов.
8. Устройство определения движения по п. 6, в котором блок (3) формирования сигнала движения выполнен с возможностью выполнения анализа главных компонент максимизированных проецированных сигналов, при этом полученная первая главная компонента является сформированным сигналом движения.
9. Устройство определения движения по п. 1, в котором блок (3) формирования сигнала движения выполнен с возможностью выполнения анализа независимых компонент сигналов акселерометра по разным пространственным осям и с возможностью определения компоненты движения из независимых компонент, получаемых в результате выполнения анализа независимых компонент, которая показывает, по меньшей мере, одно из дыхания и сердечной деятельности человека, подлежащее определению, в качестве сигнала движения.
10. Способ определения движения для определения, по меньшей мере, одного из дыхания и сердечной деятельности человека (4), при этом способ определения движения содержит следующие этапы:
- формируют сигналы акселерометра, показывающие ускорение вдоль разных пространственных осей, посредством многоосевого акселерометра (2), размещенного на теле человека (4),
- формируют сигнал движения, показывающий, по меньшей мере, одно из дыхания и сердечной деятельности человека, посредством комбинирования сигналов акселерометра по разным пространственным осям посредством блока (3) формирования сигнала движения,
причем блок формирования сигнала движения линейно комбинирует сигналы акселерометра по разным пространственным осям, причем сигналы акселерометра взвешивают таким образом, чтобы сигнал акселерометра, характеризующийся максимальным изменением ускорения, имел наибольший вес, и
блок (3) формирования сигнала движения определяет вес сигнала акселерометра в зависимости от корреляции соответствующего сигнала акселерометра с сигналом акселерометра, характеризующимся максимальным изменением ускорения, при этом вес соответствующего сигнала акселерометра является знаком корреляции.
11. Машиночитаемый носитель, имеющий сохраненную на нем компьютерную программу, при этом компьютерная программа содержит средство управляющей программы для приведения устройства (1) определения движения по п. 1 к выполнению этапов способа определения движения по п. 10, когда компьютерную программу исполняют в компьютере, управляющем устройством (1) определения движения (1).
| US 2009062628 A1, 05.03.2009 | |||
| US 2008162088 A1, 03.07.2008 | |||
| US 2007293781 A1, 20.12.2007 | |||
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОЙ РЕЗОНАНСНОЙ ДИАГНОСТИКИ И ОПРЕДЕЛЕНИЯ ОБЪЕМА ДВИЖЕНИЙ КЛЮЧИЦЫ | 2003 |
|
RU2264164C2 |
| Способ предохранения авиационных моторов от коррозии при консервации | 1941 |
|
SU75293A1 |
| JP 2006320734 A, 30.11.2006 | |||
| US 2004039420 A1, 26.02.2004 | |||
| WO 2005048824 A2, 02.06.2005 | |||

