Изобретение относится к машиностроению, предпочтительно к авиации, воздушным винтам, и касается устройства и способа вращения лопастного движителя.
Из уровня техники известны устройства вращения лопастей воздушных винтов посредством реактивной тяги, приложенной к концевым частям лопастей, патент RU 2495269, 10.10.2013, автор Боярер Михаил Зеликович. Так как величина вращающего момента пропорциональна произведению силы на радиус вектор, то приложение силы к точке, максимально удаленной от оси вращения лопасти, приводит к минимизации величины потребной силы, для создания необходимого вращающего момента и уменьшению энергозатрат. Недостатком данного способа реактивного вращения является высокий уровень шума, сложность регулирования оборотов винта и технологическая сложность изготовления лопастей и элементов конструкции.
Также известно устройство вращения лопастей посредством размещения воздушно-реактивных двигателей на концевых частях лопастей, патент RU 2127819, 20.03.1999, авторы Весенгириев Михаил Иванович, Серебренникова Наталья Михайловна, Весенгириев Андрей Михайлович. Концевой воздушно-реактивный двигатель Весенгириева. Недостатком данного технического решения также является технологическая сложность изготовления лопастей, необходимость высокой точности изготовления элементов топливной аппаратуры, поскольку требуется передача топлива на вращающиеся с высокой угловой скоростью лопасти, низкая весовая отдача устройства, соотношение получаемой тяги к весу винта, высокая стоимость.
Задача, на решение которой направлено заявленное изобретение, заключается в реализации эффективного устройства получения тяги, увеличении кпд лопастного движителя, увеличении его рабочего ресурса, безопасности применения, возможности использования предлагаемого лопастного движителя в конструкции новых летательных аппаратов, самолетов и вертолетов, квадро и мультикоптеров, трансформируемых летательных аппаратов, таких как конвертопланы, в конструкции гибридных летательных аппаратов, использующих механический и электропривод для вращения воздушных винтов, и других аппаратов, использующих тягу лопастных движителей.
Поставленная задача решается за счет того, что лопастный многофазный электромагнитный движитель, согласно изобретению, содержит корпус с установленным в нем магнитопроводом, лопасти, установленные внутри корпуса на оси вращения посредством, по меньшей мере, одной центрирующей опоры, электромагниты, установленные на концевых частях лопастей, питаемые переменным током фаз А, В и С, токосъемный узел электроснабжения электромагнитов, при этом магнитопровод выполнен в виде сплошной полосы из магнитомягкого материала с дополнительными токопроводящими элементами.
Предлагаемый лопастной движитель может быть встроен в конструкцию летательного или другого аппарата, фюзеляж, крыло или другой конструктивный элемент, и, по меньшей мере, один элемент движителя, может являться конструктивной частью летательного или другого аппарата.
Для увеличения тяги движителя, предпочтительно его исполнение по соосной схеме, когда лопасти, установленные параллельно на оси вращения, вращаются в противоположных направлениях, скорость воздушного потока относительно нижних лопастей увеличится, поскольку верхние лопасти сообщают отброшенному воздушному потоку линейную составляющую скорости, что вызывает увеличение общей тяги движителя.
Для увеличения площади рабочей поверхности электромагнитов, предпочтительно, чтобы концевые части лопастей с установленными электромагнитами имели в сечении Т-образный профиль.
При увеличении длины лопасти, при воздействии аэродинамических нагрузок, лопасть подвергается изгибу, с целью сохранения равномерного сопряжения рабочих поверхностей электромагнитов и магнитопровода, устанавливать электромагниты на концевых частях лопастей предпочтительно посредством горизонтального шарнира.
В целях оптимизации характеристик тяги лопастного движителя он может содержать механизм изменения угла установки лопастей.
Изобретение поясняется чертежами, которые не охватывают, и тем более не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами частного случая выполнения.
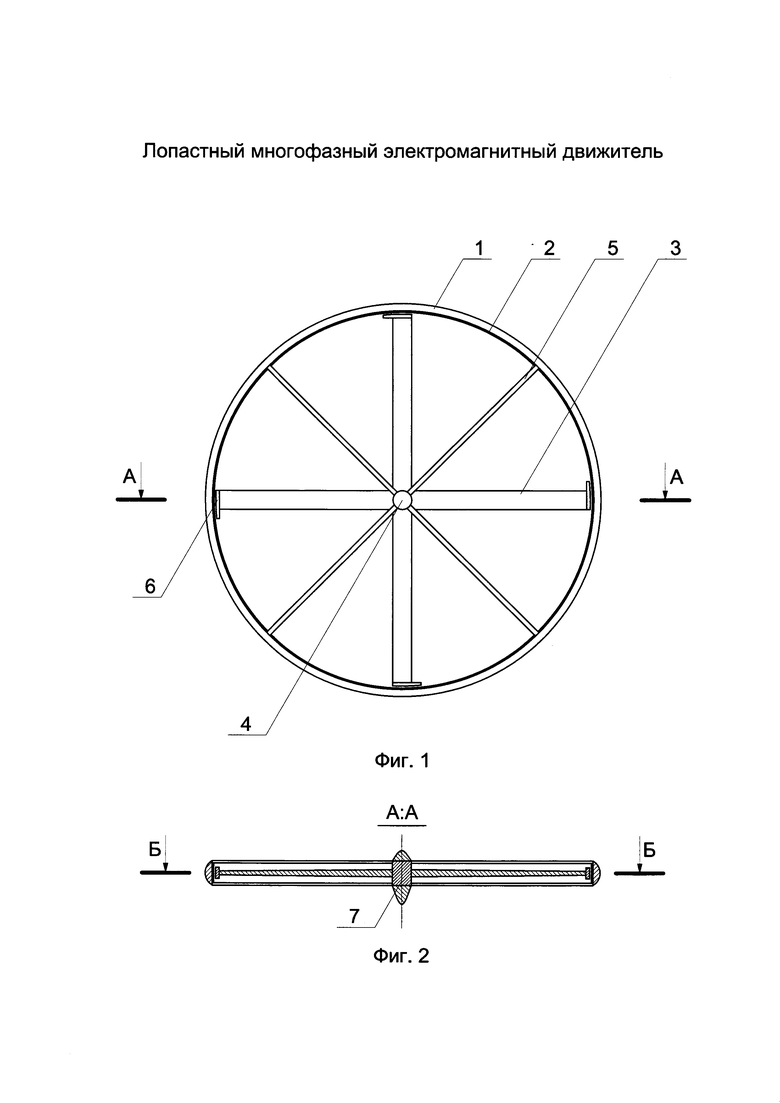
На фиг. 1 изображен общий вид движителя;
на фиг. 2 - разрез А-А на фиг. 1;
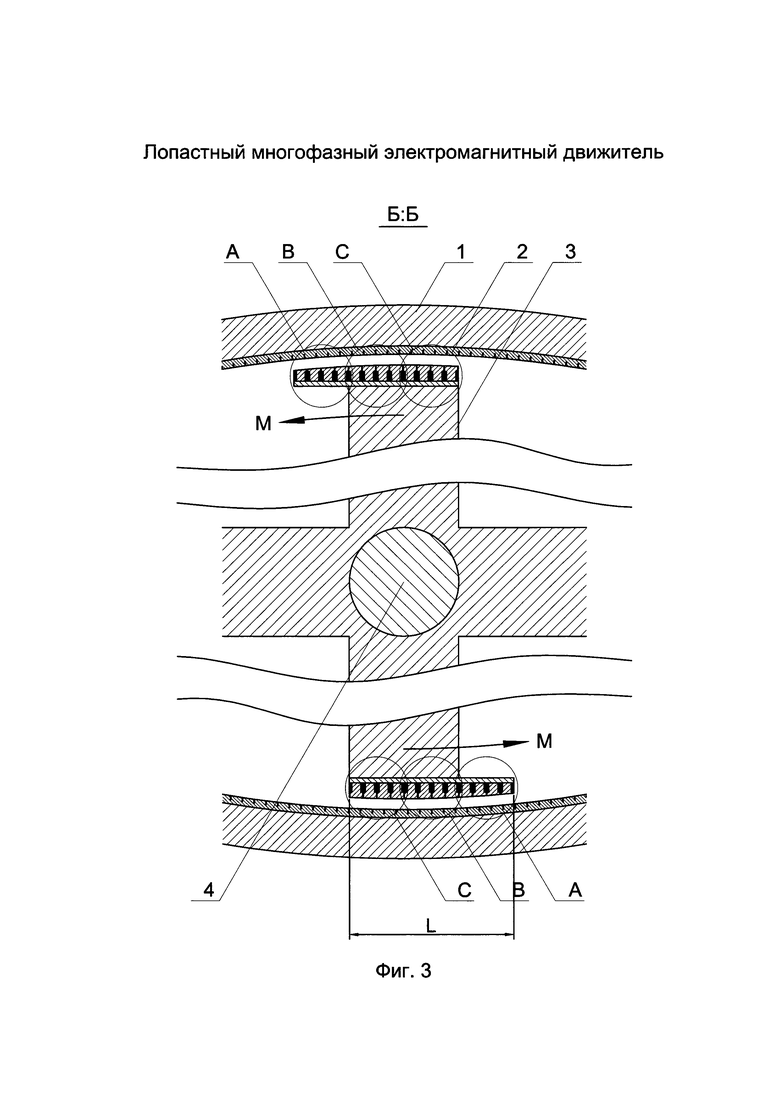
на фиг. 3 - разрез Б-Б на фиг. 2;
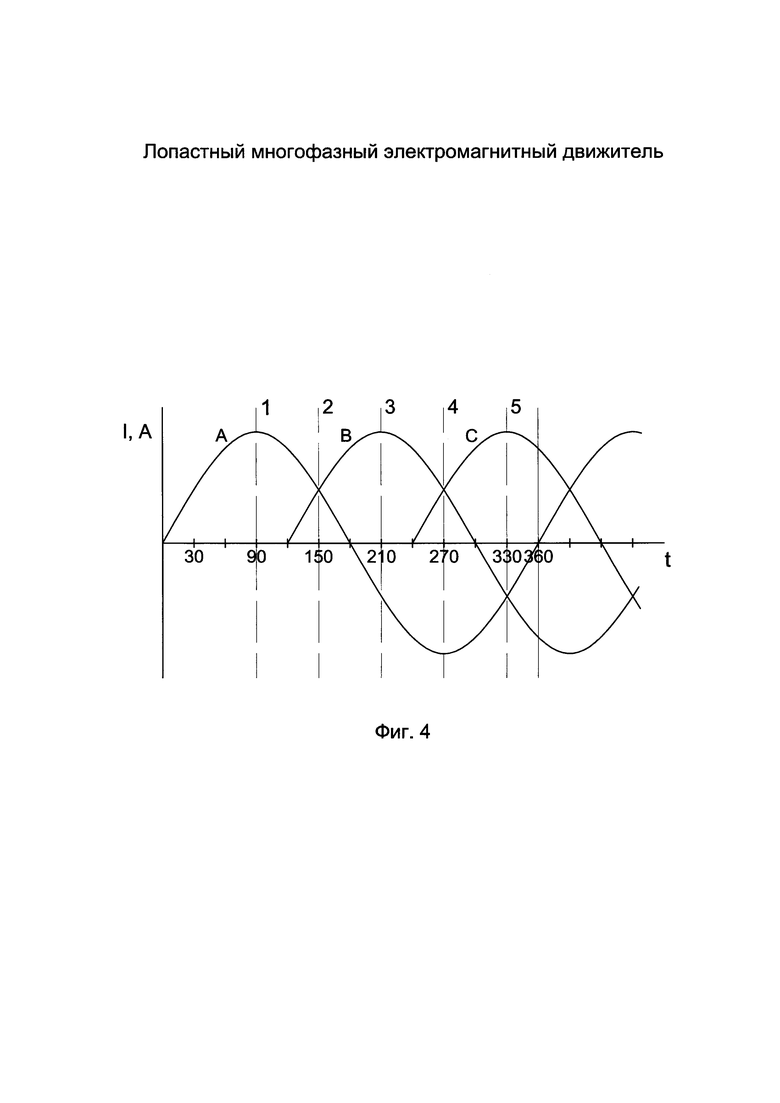
на фиг. 4 - диаграмма переменного тока фаз "А", "В", "С";
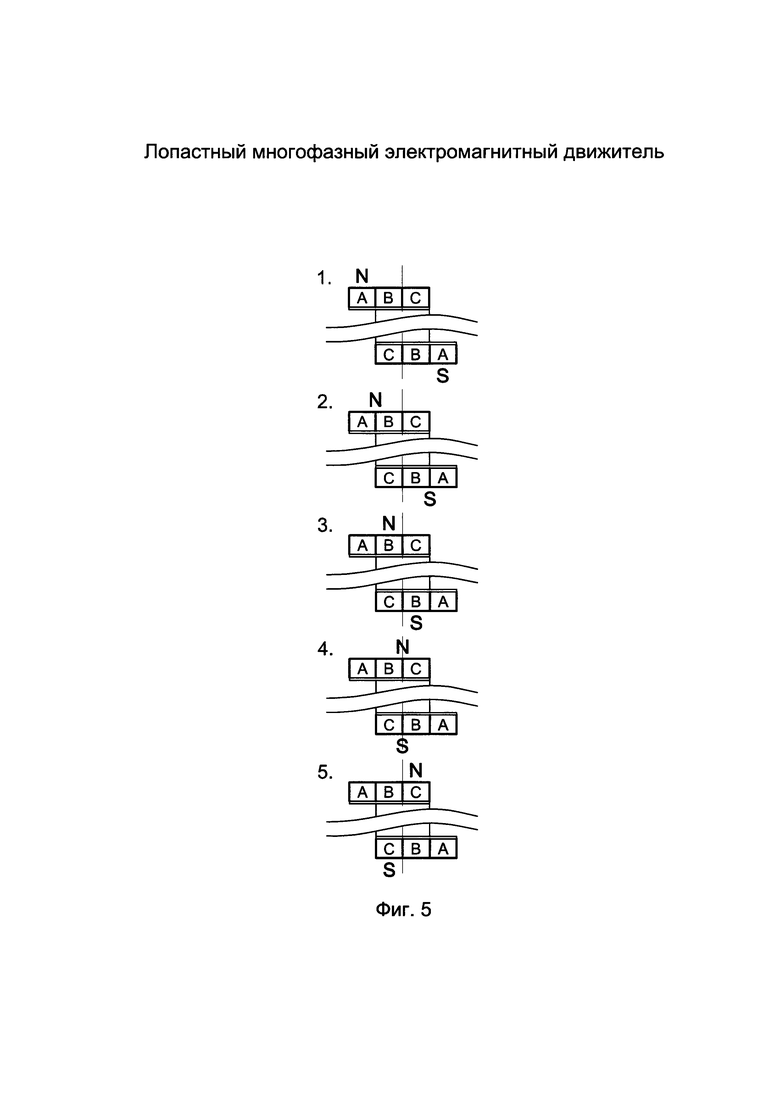
на фиг. 5 - схема перемещения результирующего магнитного потока по поверхности электромагнитов в различные моменты времени за 1 период изменения тока;
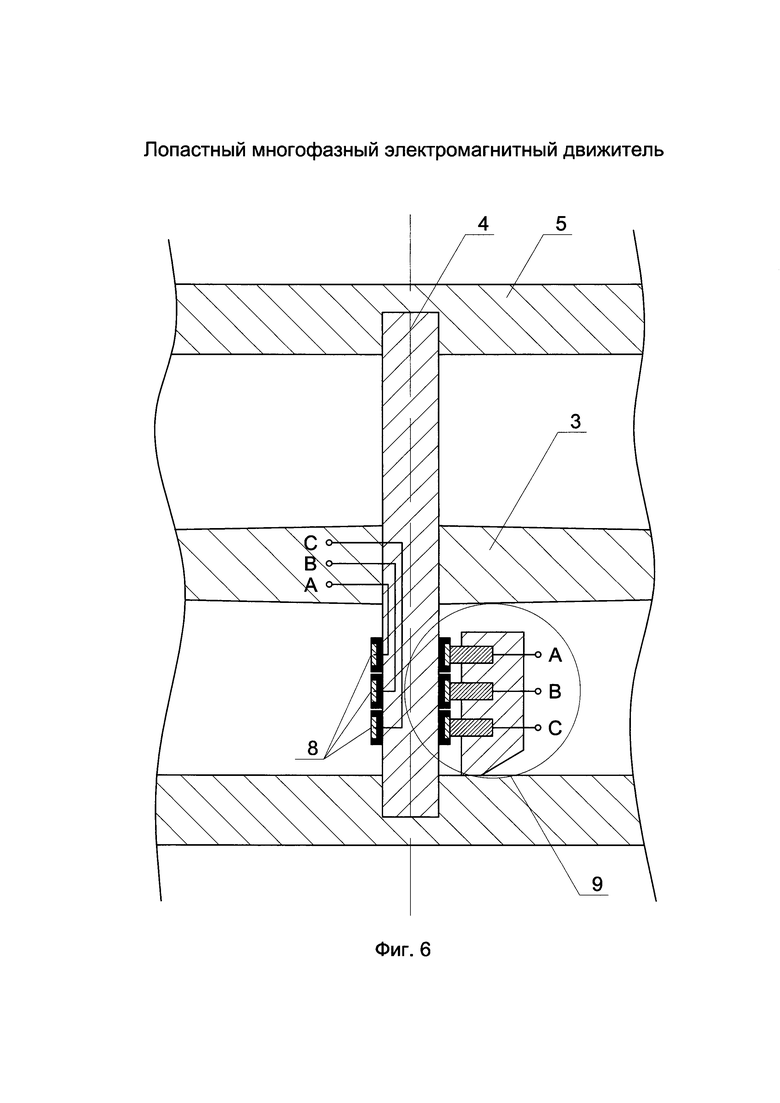
на фиг. 6 - схема токосъемного узла в разрезе;
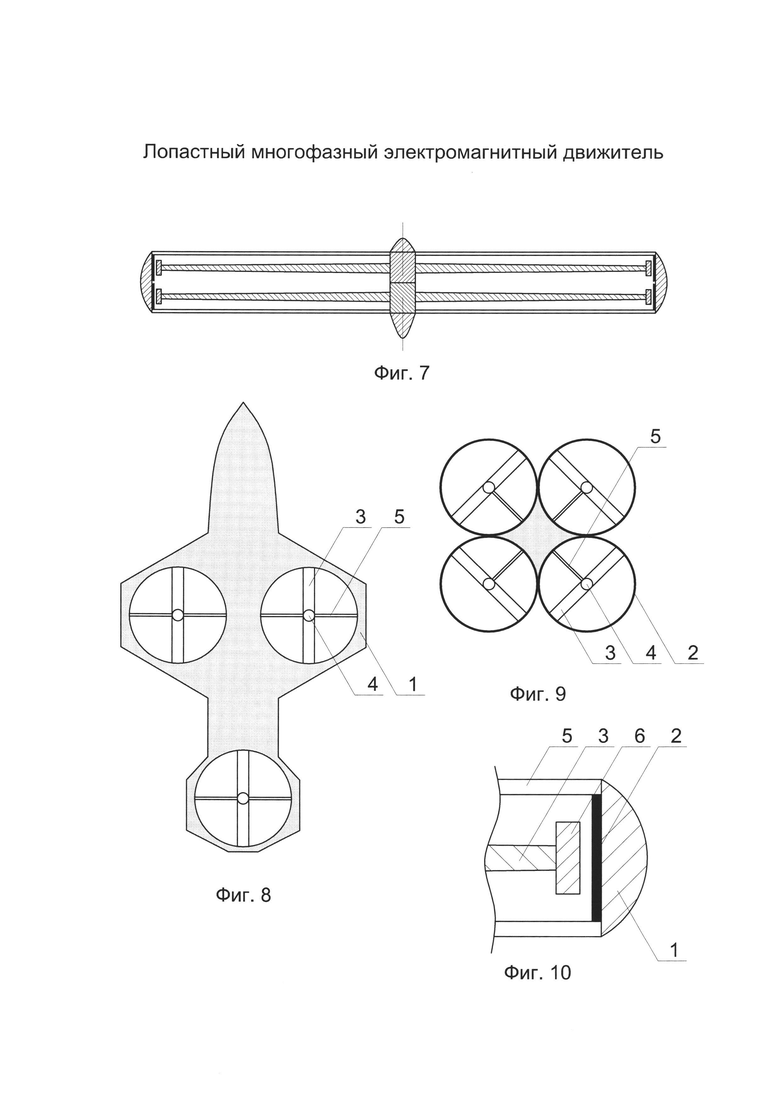
на фиг. 7 - схема движителя с параллельной установкой лопастей в разрезе;
на фиг. 8 - схема летательного аппарата с встроенным движителем;
на фиг. 9 - схема летательного аппарата с встроенным движителем;
на фиг. 10 - Т-образный профиль концевой части лопасти;
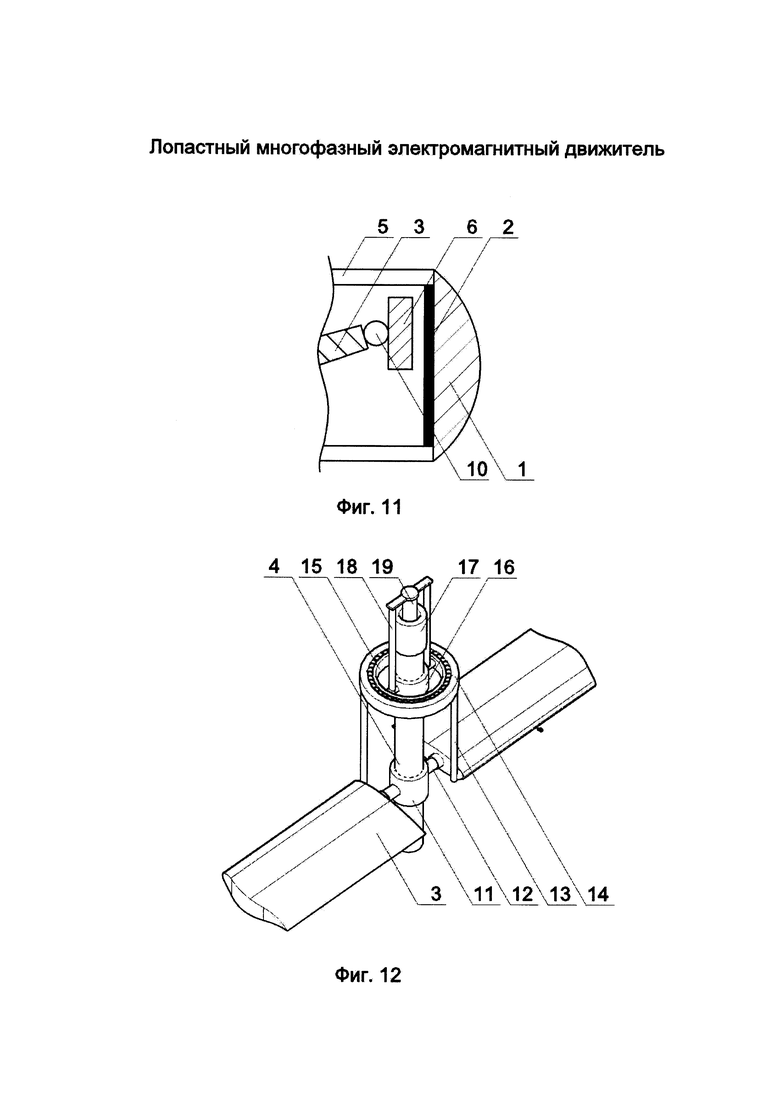
на фиг. 11 - схема крепления электромагнитов горизонтальным шарниром;
на фиг. 12 - схема механизма изменения угла установки лопастей.
Лопастный многофазный электромагнитный движитель содержит корпус 1 с установленным в нем магнитопроводом 2, лопасти 3, установленные внутри корпуса на оси 4 вращения, посредством, по меньшей мере, одной центрирующей опоры 5, электромагниты 6, установленные на концевых частях лопастей, питаемые переменным током, отличающимся по фазе, токосъемный узел 7 электроснабжения электромагнитов. Магнитопровод 2 движителя выполнен в виде сплошной полосы из магнитомягкого материала с дополнительными токопроводящими элементами.
Устройство работает следующим образом: на электромагниты 6, установленные на концевых частях лопастей 3, через токосъемный узел 7 подается переменный ток "А", "В", "С", отличающийся по фазе. На фиг. 4 изображена его диаграмма. На фиг. 3 представлено изображение электромагнитов 6, питаемых током фаз "А", "В", "С". На поверхности электромагнитов создается бегущее многофазное электромагнитное поле. На фиг. 5 изображено перемещение результирующего магнитного потока по поверхности электромагнитов в различные моменты времени 1, 2, 3, 4, 5, за один период изменения тока. При пересечении магнитопровода магнитными линиями бегущего многофазного электромагнитного поля, в нем наводится электродвижущая сила. Токи, индуцированные в магнитопроводе бегущим многофазным электромагнитным полем, создают свое магнитное поле. При взаимодействии бегущего многофазного электромагнитного поля и магнитного поля в магнитопроводе создается вращающий электромагнитный момент М, под действием которого лопасти начинают вращаться с ускорением относительно неподвижного корпуса.
Линейная скорость бегущего электромагнитного поля пропорциональна произведению длины активной части электромагнитов L (суммы длин полюсов электромагнитов) и частоты тока.
V=(А+В+С)×F=L×F,
где V - линейная скорость бегущего электромагнитного поля, м/с
А, В, С - длины соответствующих полюсов электромагнитов, м
L - сумма длин полюсов А, В и С электромагнитов, м
F - частота тока, Гц=1/с.
Скорость концевых частей лопастей будет стремиться сравняться с линейной скоростью бегущего электромагнитного поля до момента, когда сила аэродинамического сопротивления не сравняется по величине с вращающим электромагнитным моментом М, в отсутствие аэродинамической нагрузки скорость вращения лопастей будет меньше скорости бегущего электромагнитного поля, поскольку при выравнивании их скоростей прекратится создание электродвижущей силы и вращающий электромагнитный момент станет равен нулю. Максимальная рекомендуемая линейная скорость концевых частей лопастей ограничивается областью околозвуковых скоростей, так как возникает волновой кризис, и эффективность воздушного винта снижается.
Токосъемный узел 7, передающий ток к электромагнитам, установленным на концевых частях вращающихся лопастей, представляет собой изолированные токосъемные кольца 8, установленные неподвижно на оси вращения, и прижимные контактные щетки 9, к которым подключены фазные проводники. Последующая передача тока от токосъемных колец 8 к электромагнитам осуществляется посредством проводников, размещенных в лопасти, на схеме не указаны (см. Фиг. 6).
Для увеличения тяги движителя предпочтительно его исполнение по сосной схеме, когда лопасти, установленные параллельно на оси вращения, вращаются в противоположных направлениях. Скорость воздушного потока относительно нижних лопастей увеличится, поскольку верхние лопасти сообщают отброшенному воздушному потоку линейную составляющую скорости, что вызывает увеличение общей тяги движителя (см. Фиг. 7).
Предлагаемый лопастной движитель может быть встроен в конструкцию летательного или другого аппарата, фюзеляж, крыло или другой конструктивный элемент, и, по меньшей мере, один элемент движителя может являться конструктивной частью летательного или другого аппарата (см. Фиг. 8, 9).
Для увеличения площади рабочей поверхности электромагнитов предпочтительно, чтобы концевые части лопастей с установленными электромагнитами имели в сечении Т-образный профиль (см. Фиг. 10).
При увеличении длины лопасти при воздействии аэродинамических нагрузок лопасть 3 подвергается изгибу. С целью сохранения равномерности сопряжения рабочих поверхностей электромагнитов 6 и магнитопровода 2 устанавливать электромагниты 6 на концевых частях лопастей предпочтительно посредством горизонтального шарнира 10 (см. Фиг. 11).
В целях оптимизации характеристик тяги лопастного движителя он может содержать механизм изменения угла установки лопастей. На Фиг. 12 изображен один из возможных вариантов исполнения механизма изменения угла установки лопастей. Механизм содержит втулку 11 винта, горизонтальный шарнир 12 лопасти 3, тягу 13 лопасти 3, подвижное кольцо 14, соединенное с тягой 13 лопасти 3, неподвижную в горизонтальной плоскости втулку 16, соединенную с неподвижным в горизонтальной плоскости кольцом 15, относительно которого вращается подвижное кольцо 14, исполнительный механизм 17 в виде электро- или гидропривода, установленный на оси 4 вращения, подвижный шток 19, соединенный тягой 18 с втулкой 16. Исполнительный механизм 17 поднимает или опускает шток 19, который посредством тяги 18 перемещает втулку 16 в вертикальной плоскости относительно оси 4 вращения. Перемещение втулки 16 вызывает перемещение в вертикальной плоскости подвижного кольца 14, воздействующего на тягу 13, которая вызывает вращение лопасти 3 относительно горизонтального шарнира 12, таким образом изменяя угол установки лопасти.
Источником тока для питания электромагнитов на борту летательного или другого аппарата могут быть аккумуляторные батареи с инверторами, бортовые энергетические установки, состоящие из генератора переменного тока и силового привода в виде газотурбинного или поршневого двигателя, другие виды энергетических установок.
Корпус движителя, лопасти, центрирующие опоры предпочтительно изготавливаются из углепластика.
Электромагниты предпочтительно состоят из сердечника, набранного из пластин магнитомягкого материала, с многовитковой обмоткой. Установка электромагнитов на концевых частях лопастей осуществляется предпочтительно в паз "ласточкин хвост", на схеме не указано.
Улучшенная безопасность предлагаемого движителя достигается тем, что лопасти вращаются с высокой скоростью внутри корпуса движителя, тем самым снижается травмоопасность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лопастный электромагнитный движитель | 2017 |
|
RU2649838C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИЖИТЕЛЬ В ЖИДКИХ СРЕДАХ С ЭЛЕКТРИЧЕСКОЙ РЕДУКЦИЕЙ | 2009 |
|
RU2421373C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2495795C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
| ВИХРЕВОЙ РЕКУПЕРАТИВНЫЙ ДВИЖИТЕЛЬ | 1994 |
|
RU2076818C1 |
| ЛОПАСТНОЙ ДВИЖИТЕЛЬ | 2001 |
|
RU2184677C1 |
| АЭРОДВИЖИТЕЛЬ | 2008 |
|
RU2445239C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИЖИТЕЛЬ В ЖИДКИХ СРЕДАХ | 2004 |
|
RU2265550C1 |
| АЭРОПОЕЗД С ПИТАНИЕМ ОТ ТРОЛЛЕЯ (ВАРИАНТЫ) | 2018 |
|
RU2692345C1 |
| СПОСОБ РЕАЛИЗАЦИИ РЕЖИМА СВЕРХЗВУКОВОГО ОБТЕКАНИЯ НА ЛОПАСТИ ВОЗДУШНОГО НЕСУЩЕГО ВИНТА И АВИАЦИОННО-КОСМИЧЕСКАЯ СИСТЕМА С ОСНОВАННЫМ НА ЭТОМ СПОСОБЕ СООСНЫМ НЕСУЩИМ ВИНТОМ ИЗМЕНЯЕМОГО ДИАМЕТРА СО СВЕРХЗВУКОВЫМ ОБТЕКАНИЕМ ЛОПАСТЕЙ | 2004 |
|
RU2297949C2 |
Изобретение относится к электротехнике, к авиации, воздушным винтам и касается устройства и способа вращения лопастного движителя. Технический результат заключается в реализации эффективного устройства получения тяги, увеличении к.п.д., рабочего ресурса, безопасности применения, возможности использования в конструкции новых летательных аппаратов, самолетов и вертолетов, квадро и мультикоптеров, трансформируемых летательных аппаратов, таких как конвертопланы, в конструкции гибридных летательных аппаратов, использующих механический и электропривод для вращения воздушных винтов, и других аппаратов, использующих тягу лопастных движителей. Лопастный многофазный электромагнитный движитель содержит корпус с установленным в нем магнитопроводом, лопасти, установленные внутри корпуса на оси вращения посредством по меньшей мере одной центрирующей опоры, электромагниты, установленные на концевых частях лопастей, питаемые переменным током, отличающимся по фазе, токосъемный узел электроснабжения электромагнитов. 6 з.п. ф-лы, 12 ил.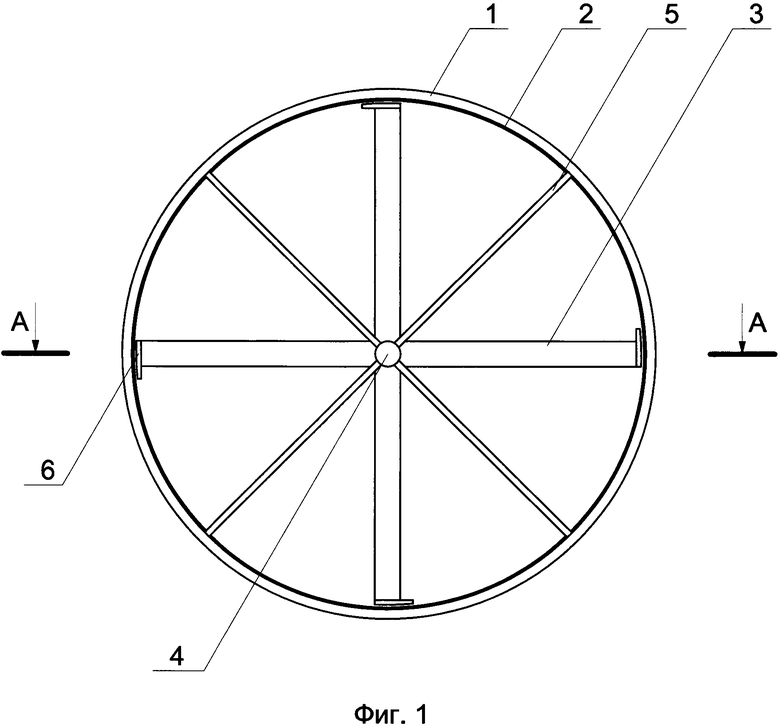
1. Лопастный многофазный электромагнитный движитель, характеризующийся тем, что он содержит корпус с установленным в нем магнитопроводом, лопасти, установленные внутри корпуса на оси вращения посредством по меньшей мере одной центрирующей опоры, электромагниты, установленные на концевых частях лопастей, питаемые переменным током фаз А, В и С, токосъемный узел электроснабжения электромагнитов, при этом магнитопровод выполнен в виде сплошной полосы из магнитомягкого материала с дополнительными токопроводящими элементами.
2. Лопастный многофазный электромагнитный движитель по п. 1, отличающийся тем, что он встроен в конструкцию летательного или другого аппарата, фюзеляж, крыло или другой конструктивный элемент, и по меньшей мере один элемент движителя является конструктивной частью летательного или другого аппарата.
3. Лопастный многофазный электромагнитный движитель по п. 1, отличающийся тем, что лопасти, установленные параллельно на оси вращения, вращаются в противоположных направлениях.
4. Лопастный многофазный электромагнитный движитель по любому из пп. 1-3, отличающийся тем, что концевые части лопастей с установленными электромагнитами имеют в сечении Т-образный профиль.
5. Лопастный многофазный электромагнитный движитель по любому из пп. 1-3, отличающийся тем, что электромагниты на концевых частях лопастей установлены посредством горизонтального шарнира.
6. Лопастный многофазный электромагнитный движитель по любому из пп. 1-3, отличающийся тем, что он содержит механизм изменения угла установки лопастей.
7. Лопастный многофазный электромагнитный движитель по любому из пп. 1-3, отличающийся тем, что концевые части лопастей с установленными электромагнитами имеют в сечении Т-образный профиль, электромагниты на концевых частях лопастей установлены посредством горизонтального шарнира, при этом устройство содержит механизм изменения угла установки лопастей.
| RU 1349494 С2, 20.03.2009 | |||
| RU 2010135163 A, 23.08.2010 | |||
| КОНЦЕВОЙ ВОЗДУШНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ ВЕСЕНГИРИЕВА | 1997 |
|
RU2127819C1 |
| СПОСОБ РАБОТЫ КОМПРЕССОРНОГО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ | 2011 |
|
RU2495269C2 |
| Способ получения олифы из касторового масла | 1937 |
|
SU52919A1 |
| РУКАВНАЯ ПЛЕНКА ДЛЯ ОБОЛОЧКИ ПИЩЕВЫХ ПРОДУКТОВ И ОБОЛОЧКА ПИЩЕВЫХ ПРОДУКТОВ, ПОЛУЧЕННАЯ ИЗ ПЛЕНКИ | 2010 |
|
RU2522545C2 |

