Изобретение относится к машиностроению, предпочтительно к авиации, воздушным винтам, и касается устройства и способа вращения лопастного движителя.
Из уровня техники известны устройства вращения лопастей воздушных винтов посредством реактивной тяги, приложенной к концевым частям лопастей, патент RU 2495269, 10.10.2013, автор Боярер Михаил Зеликович. Так как величина вращающего момента пропорциональна произведению силы на радиус-вектор, то приложение силы к точке, максимально удаленной от оси вращения лопасти, приводит к минимизации величины потребной силы, для создания необходимого вращающего момента и уменьшению энергозатрат. Недостатком данного способа реактивного вращения является высокий уровень шума, сложность регулирования оборотов винта и технологическая сложность изготовления лопастей и элементов конструкции.
Также известно устройство вращения лопастей посредством размещения воздушно-реактивных двигателей на концевых частях лопастей, патент RU 2127819, 20.03.1999, авторы Весенгириев Михаил Иванович, Серебренникова Наталья Михайловна, Весенгириев Андрей Михайлович. Концевой воздушно-реактивный двигатель Весенгириева. Недостатком данного технического решения также является технологическая сложность изготовления лопастей, необходимость высокой точности изготовления элементов топливной аппаратуры, поскольку требуется передача топлива на вращающиеся с высокой угловой скоростью лопасти, низкая весовая отдача устройства, соотношение получаемой тяги к весу винта, высокая стоимость.
Задача, на решение которой направлено заявленное изобретение, заключается в реализации эффективного устройства получения тяги, увеличении кпд лопастного движителя, исключении механических трансмиссий, увеличении рабочего ресурса, безопасности применения, возможности использования предлагаемого лопастного движителя в конструкции новых летательных аппаратов, самолетов и вертолетов, квадро- и мультикоптеров, трансформируемых летательных аппаратов, таких как конвертопланы, в конструкции гибридных летательных аппаратов, использующих механический и электропривод для вращения воздушных винтов, и других аппаратов, использующих тягу лопастных движителей.
Поставленная задача решается за счет того, что лопастный электромагнитный движитель содержит корпус с установленными в нем магнитными элементами чередующейся полярности, представляющими собой вторичный элемент синхронной машины, лопасти, установленные внутри корпуса на оси вращения, посредством по меньшей мере одной центрирующей опоры, по меньшей мере два электромагнита, установленные на концевой части лопасти, представляющие собой первичный элемент синхронной машины, токосъемный узел электроснабжения электромагнитов, по меньшей мере один датчик положения ротора.
Магнитные элементы чередующейся полярности, установленные в корпусе, могут быть выполнены в виде постоянных магнитов.
В целях увеличения мощности движителя, а также в целях снижения зависимости от конъюктуры рынка постоянных магнитов, в том числе сделанных из сплавов редкоземельных металлов, магнитные элементы чередующейся полярности, установленные в корпусе, могут быть выполнены в виде электромагнитов.
Для увеличения тяги движителя предпочтительно его исполнение по соосной схеме, когда лопасти, установленные параллельно на оси вращения, вращаются в противоположных направлениях, скорость воздушного потока относительно нижних лопастей увеличится, поскольку верхние лопасти сообщают отброшенному воздушному потоку линейную составляющую скорости, что вызывает увеличение общей тяги движителя.
Для увеличения площади рабочей поверхности электромагнитов и снижения индуктивного аэродинамического сопротивления предпочтительно, чтобы концевые части лопастей с установленными электромагнитами имели в сечении Т-образный профиль.
В целях оптимизации тяги электромагнитного лопастного движителя, он может содержать механизм изменения угла установки лопастей.
Для снижения вибраций и уменьшения механических нагрузок на конструкцию лопасть может крепиться на оси вращения посредством горизонтального шарнира, позволяющего лопасти совершать маховые движение в плоскости тяги.
Для обеспечения подвижности лопасти в плоскости вращения лопасть может крепиться на оси вращения посредством вертикального шарнира.
В целях уменьшения количества деталей и увеличения рабочего ресурса лопасть может крепиться на оси вращения посредством упругого элемента. Упругий элемент может быть выполнен из композитных материалов, также может быть выполнен в виде эластомерного подшипника, в частном случае представляющего собой пакет из металлических пластин, чередующихся с упругим материалом эластомером. Упругий элемент также может быть выполнен в виде торсиона.
Лопастный движитель может содержать по меньшей мере одну пару лопастей с установленными электромагнитами и по меньшей мере одну пару лопастей без электромагнитов.
В целях оптимизации тяги движителя лопасти без электромагнитов могут содержать механизм изменения угла установки лопастей.
Для снижения вибраций и уменьшения механических нагрузок на конструкцию, лопасти без электромагнитов могут крепиться на оси вращения посредством горизонтальных шарниров, позволяющих лопастям совершать маховые движения в плоскости тяги.
Для обеспечения подвижности лопастей без электромагнитов в плоскости вращения лопасти могут крепиться на оси вращения посредством вертикальных шарниров.
В целях уменьшения количества деталей и увеличения рабочего ресурса лопасти без электромагнитов могут крепиться на оси вращения посредством упругого элемента.
В целях увеличения точности регулировки оборотов ротора лопастный движитель может содержать датчик оборотов ротора. Датчик оборотов может быть выполнен на основе элементов Холлав виде оптических или других типов датчиков оборотов. Датчик оборотов предпочтительно устанавливается в корпусе движителя. На схеме не указан.
Предлагаемый лопастный движитель может быть встроен в конструкцию летательного или другого аппарата, фюзеляж, крыло или другой конструктивный элемент, и по меньшей мере один элемент движителя, может являться конструктивной частью летательного или другого аппарата.
Изобретение поясняется чертежами, которые не охватывают, и тем более не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами частного случая выполнения:
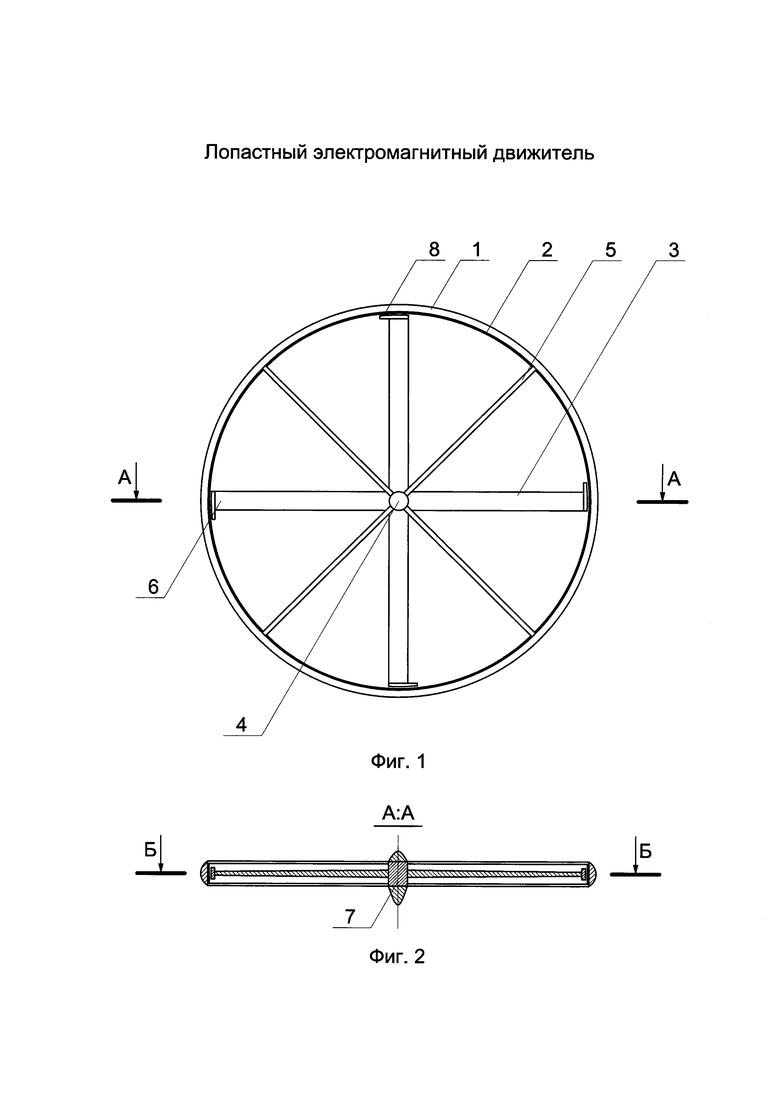
На фиг. 1 дан общий вид движителя.
На фиг. 2 - разрез А-А на фиг. 1.
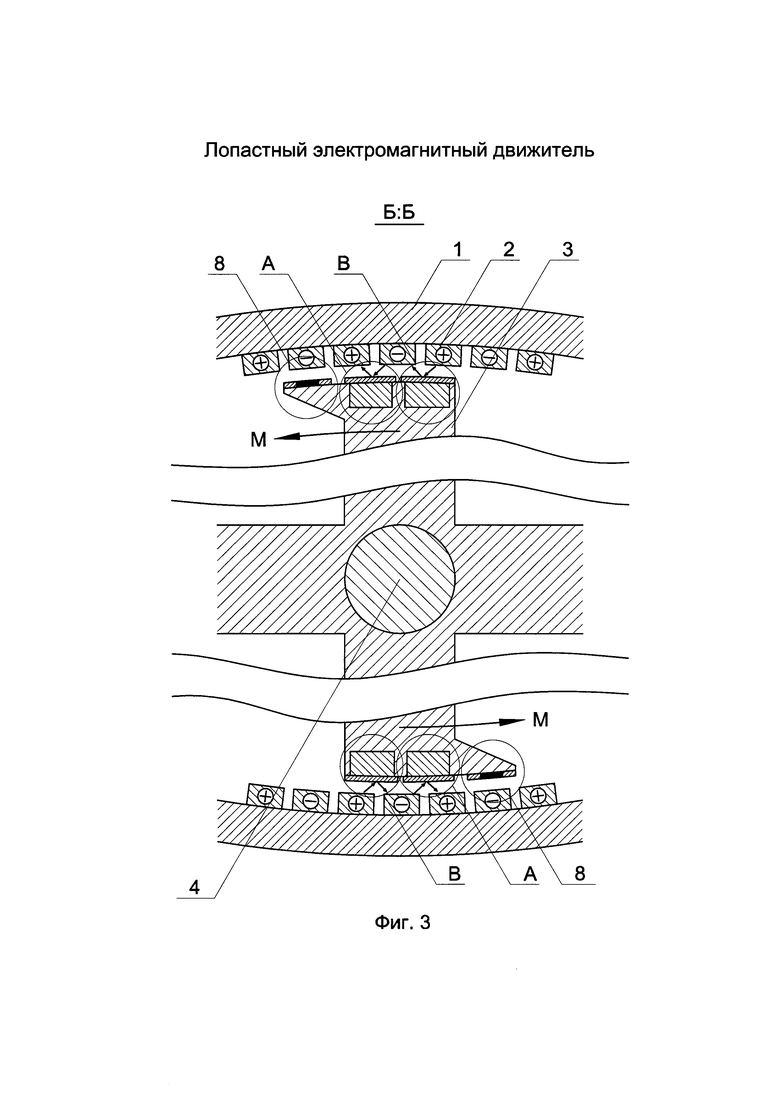
На фиг. 3 - разрез Б-Б на фиг. 2.
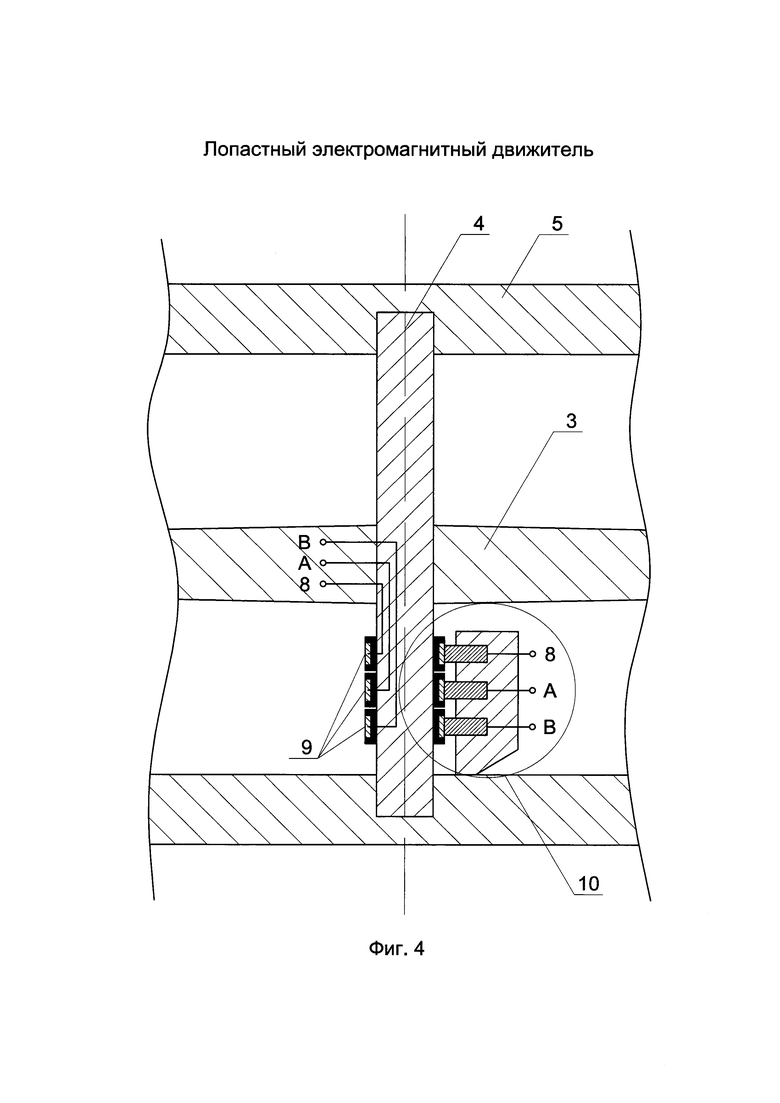
На фиг. 4 - схема токосъемного узла в разрезе.
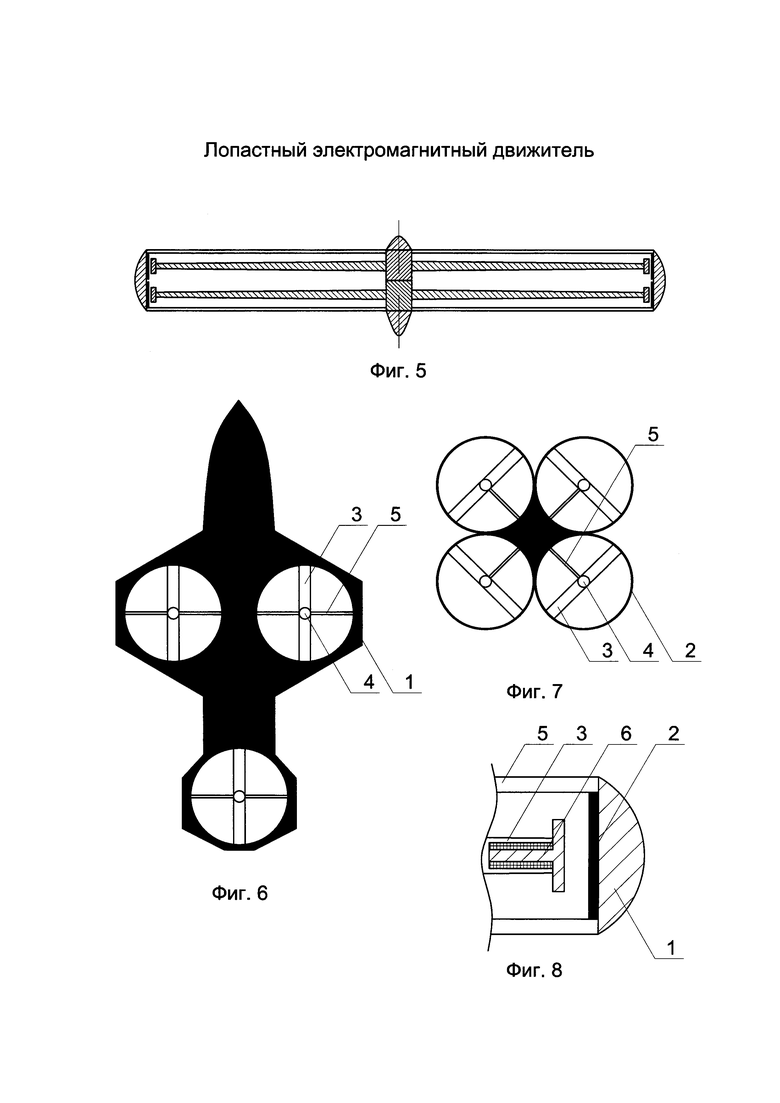
На фиг. 5 - схема движителя с параллельной установкой лопастей в разрезе.
На фиг. 6 - схема летательного аппарата с встроенным движителем.
На фиг. 7 - схема летательного аппарата с встроенным движителем.
На фиг. 8 - Т-образный профиль концевой части лопасти.
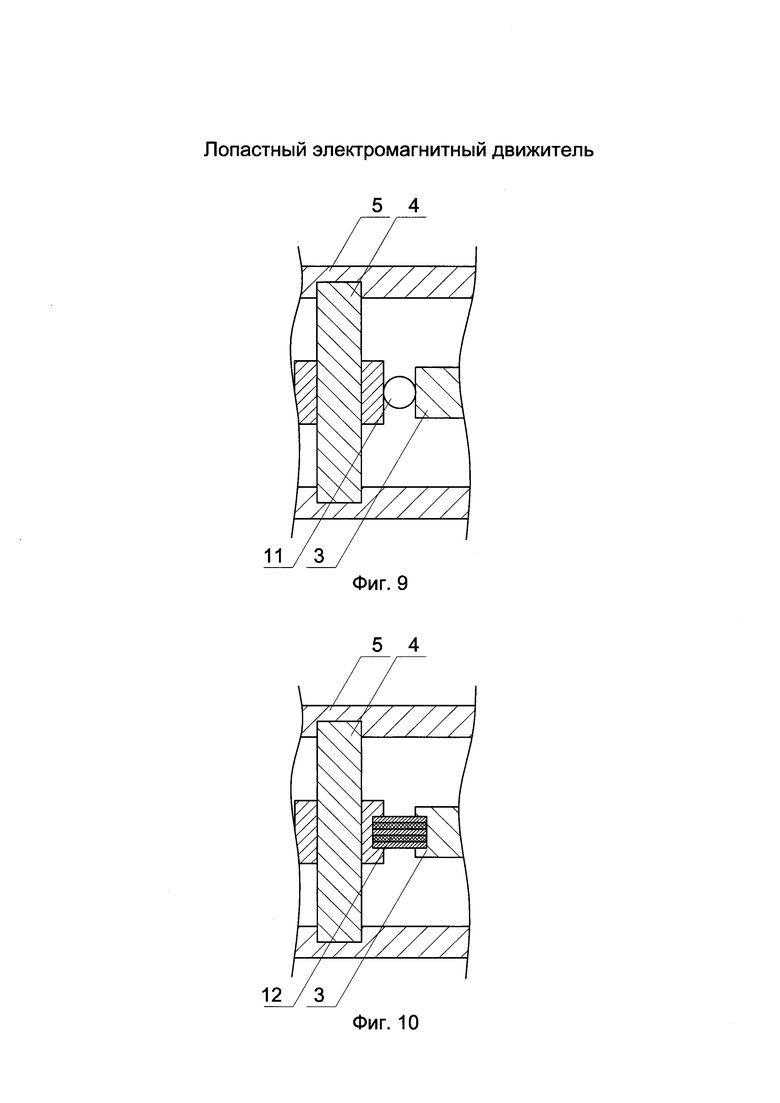
На фиг. 9 - схема крепления лопасти горизонтальным шарниром.
На фиг. 10 - схема крепления лопасти посредством упругого элемента.
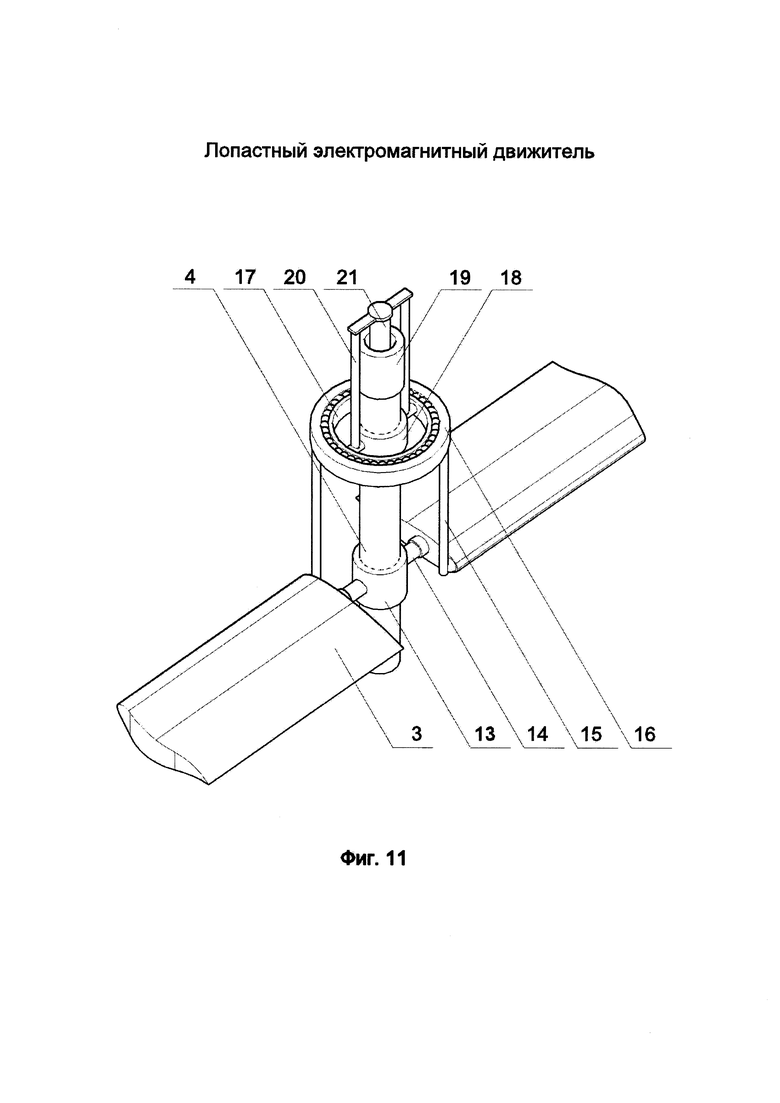
На фиг. 11 - схема механизма изменения угла установки лопастей.
Лопастный электромагнитный движитель содержит корпус 1 с установленными в нем магнитными элементами чередующейся полярности 2, представляющими собой вторичный элемент синхронной машины, лопасти 3, установленные внутри корпуса на оси вращения 4, посредством по меньшей мере одной центрирующей опоры 5, по меньшей мере два электромагнита 6, установленные на концевой части лопасти, представляющие собой первичный элемент синхронной машины, токосъемный узел 7 электроснабжения электромагнитов, по меньшей мере один датчик положения ротора 8.
Устройство работает следующим образом: по сигналу датчика положения 8 ротора относительно магнитных элементов чередующейся полярности, установленных в корпусе, на электромагниты 6, установленные на концевых частях лопастей 3, через токосъемный узел 7, подается ток "А", "В", формирующий полярность электромагнитов. Полярность электромагнитов, установленных на лопасти, формируется таким образом, что вызывает их притягивание к разнополярным полюсам магнитных элементов, установленных в корпусе, и отталкивание от однополярных полюсов, установленных в корпусе. Результирующий магнитный момент М приводит ротор в движение Фиг. 3.
Датчик положения 8 может быть выполнен на основе элементов Холла в виде оптического или другого типа датчиков положения. Датчик положения предпочтительно устанавливается на концевой части лопасти.
Магнитные элементы чередующейся полярности 2, установленные в корпусе, могут быть выполнены в виде постоянных магнитов.
В целях увеличения мощности движителя, а также в целях снижения зависимости от конъюктуры рынка постоянных магнитов, в том числе сделанных из сплавов редкоземельных металлов, магнитные элементы чередующейся полярности 2, установленные в корпусе, могут быть выполнены в виде электромагнитов.
Для увеличения тяги движителя предпочтительно его исполнение по соосной схеме, когда лопасти, установленные параллельно, на оси вращения, вращаются в противоположных направлениях. Скорость воздушного потока относительно нижних лопастей увеличится, поскольку верхние лопасти сообщают отброшенному воздушному потоку линейную составляющую скорости, что вызывает увеличение общей тяги движителя. Фиг. 5.
Для увеличения площади рабочей поверхности электромагнитов и снижения индуктивного аэродинамического сопротивления предпочтительно, чтобы концевые части лопастей с установленными электромагнитами имели в сечении Т-образный профиль. Фиг. 8.
В целях оптимизации тяги электромагнитного лопастного движителя, он может содержать механизм изменения угла установки лопастей. На Фиг. 11 изображен один из возможных вариантов исполнения механизма изменения угла установки лопастей. Механизм содержит втулку винта 13, осевой шарнир лопасти 14, тягу лопасти 15, подвижное кольцо 16, соединенное с тягой лопасти, неподвижную в горизонтальной плоскости втулку 18, соединенную с неподвижным в горизонтальной плоскости кольцом 17, относительно которого вращается подвижное кольцо 16, исполнительный механизм 19 в виде механического, электрического или гидропривода, установленный на оси вращения 4 подвижный шток 21, соединенный тягой 20 с втулкой 18. Исполнительный механизм 19 поднимает или опускает шток 21, который посредством тяги 20 перемещает втулку 18 в вертикальной плоскости относительно оси 4, перемещение втулки вызывает перемещение в вертикальной плоскости подвижного кольца 16, воздействующего на тягу 15, которая вызывает вращение лопасти относительно осевого шарнира 14, таким образом, изменяя угол установки лопасти.
Для снижения вибраций и уменьшения механических нагрузок на конструкцию лопасть может крепиться на оси вращения посредством горизонтального шарнира 11, позволяющего лопасти совершать маховые движение в плоскости тяги Фиг. 9.
Для обеспечения подвижности лопасти в плоскости вращения лопасть может крепиться на оси вращения посредством вертикального шарнира. На схеме не указан.
В целях уменьшения количества деталей и увеличения рабочего ресурса, лопасть может крепиться на оси вращения посредством упругого элемента. Упругий элемент может быть выполнен из композитных материалов, также может быть выполнен в виде эластомерного подшипника, в частном случае представляющего собой пакет 12 из металлических пластин, чередующихся с упругим материалом эластомером. Упругий элемент также может быть выполнен в виде торсиона. Фиг. 10
Лопастный движитель может содержать по меньшей мере одну пару лопастей с установленными электромагнитами и по меньшей мере одну пару лопастей без электромагнитов.
В целях оптимизации тяги движителя лопасти без электромагнитов могут содержать механизм изменения угла установки лопастей.
Для снижения вибраций и уменьшения механических нагрузок на конструкцию лопасти без электромагнитов могут крепиться на оси вращения посредством горизонтальных шарниров, позволяющих лопастям совершать маховые движение в плоскости тяги.
Для обеспечения подвижности лопастей без электромагнитов в плоскости вращения лопасти могут крепиться на оси вращения посредством вертикальных шарниров.
В целях уменьшения количества деталей и увеличения рабочего ресурса лопасти без электромагнитов могут крепиться на оси вращения посредством упругого элемента.
В целях увеличения точности регулировки оборотов ротора лопастный движитель может содержать датчик оборотов ротора. Датчик оборотов может быть выполнен на основе элементов Холла, в виде оптических или других типов датчиков оборотов. Датчик оборотов предпочтительно устанавливается в корпусе движителя. На схеме не указан.
Предлагаемый лопастный движитель может быть встроен в конструкцию летательного или другого аппарата, фюзеляж, крыло или другой конструктивный элемент, и по меньшей мере один элемент движителя может являться конструктивной частью летательного или другого аппарата Фиг. 6, 7.
Токосъемный узел 7 для электромагнитов, установленных на концевых частях вращающихся лопастей, в частном случае, представляет собой изолированные токосъемные кольца 9, установленные неподвижно на оси вращения, и прижимные контактные щетки 10, к которым подключены фазные проводники А, В. Последующая передача тока от токосъемных колец к электромагнитам осуществляется посредством проводников, размещенных в лопасти. Сигнал от датчика положения, при его установке на концевой части лопасти, также может передаваться посредством токосъемного узла Фиг. 4.
Управляющее устройство по известному закону с использованием сигнала от датчика положения 8 ротора запитывает током А, В электромагниты на лопасти. Источником тока для питания электромагнитов на борту летательного или другого аппарата могут быть аккумуляторные батареи с преобразователями тока, устройствами широтно-импульсной модуляции, бортовые энергетические установки, состоящие из генератора тока и силового привода в виде газотурбинного или поршневого двигателя, другие виды энергетических установок.
Корпус движителя при исполнении магнитных элементов чередующейся полярности в виде постоянных магнитов предпочтительно может быть выполнен в виде цельного или сборного металлического кольца с наклеенными на него постоянными магнитами. При применении магнитных элементов чередующейся полярности в виде электромагнитов, корпус движителя предпочтительно может быть выполнен из алюминия, или композитного материала в целях снижения веса.
Лопасти предпочтительно изготавливаются из композитного материала с лонжероном из сплава В 95 для усиления прочности и жесткости лопасти. Центрирующие опоры предпочтительно изготавливать из композитного материала или сплава В 95.
Электромагниты предпочтительно состоят из сердечника, набранного из пластин магнитомягкого материала, с многовитковой обмоткой, установка электромагнитов на концевых частях лопастей осуществляется предпочтительно в паз "ласточкин хвост", на схеме не указано. В целях снижения осевых вибраций лопасти, а также в целях увеличения мощности движителя количество тяговых электромагнитов на лопасти может быть увеличено.
В целях улучшения точности регулировки и надежности поддержания необходимых оборотов ротора в зависимости от аэродинамической нагрузки управляющее устройство может получать данные от датчика оборотов ротора.
Улучшенная безопасность предлагаемого движителя достигается тем, что лопасти вращаются с высокой скоростью внутри корпуса движителя, тем самым снижается травмоопасность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лопастный многофазный электромагнитный движитель | 2015 |
|
RU2663194C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2495795C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОПРИВОДОМ | 2003 |
|
RU2266236C2 |
| ВИХРЕВОЙ РЕКУПЕРАТИВНЫЙ ДВИЖИТЕЛЬ | 1994 |
|
RU2076818C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| Транспортное устройство многоразового использования | 2020 |
|
RU2759060C1 |
| СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2015 |
|
RU2623680C1 |
| ВЕТРОУСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ЭЛЕКТРОЭНЕРГИИ | 1994 |
|
RU2094651C1 |
| ЭЛЕКТРОДВИЖИТЕЛЬ ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ В ЛИНЕЙНУЮ ТЯГОВУЮ СИЛУ | 2007 |
|
RU2374742C2 |
Изобретение относится к транспорту, в частности к конструкциям винтовых движителей. Лопастный электромагнитный движитель содержит корпус с установленными в нем магнитными элементами чередующейся полярности, представляющими собой вторичный элемент синхронной машины, лопасти, установленные внутри корпуса на оси вращения посредством по меньшей мере одной центрирующей опоры, по меньшей мере два электромагнита, установленные на концевой части лопасти, представляющие собой первичный элемент синхронной машины, токосъемный узел электроснабжения электромагнитов, по меньшей мере один датчик положения ротора. Магнитные элементы чередующейся полярности, установленные в корпусе, выполнены в виде постоянных магнитов или электромагнитов. Лопасти, установленные параллельно на оси вращения, вращаются в противоположных направлениях. Обеспечивается увеличение КПД лопастного движителя, исключении механических трансмиссий, увеличении рабочего ресурса. 15 з.п. ф-лы, 11 ил.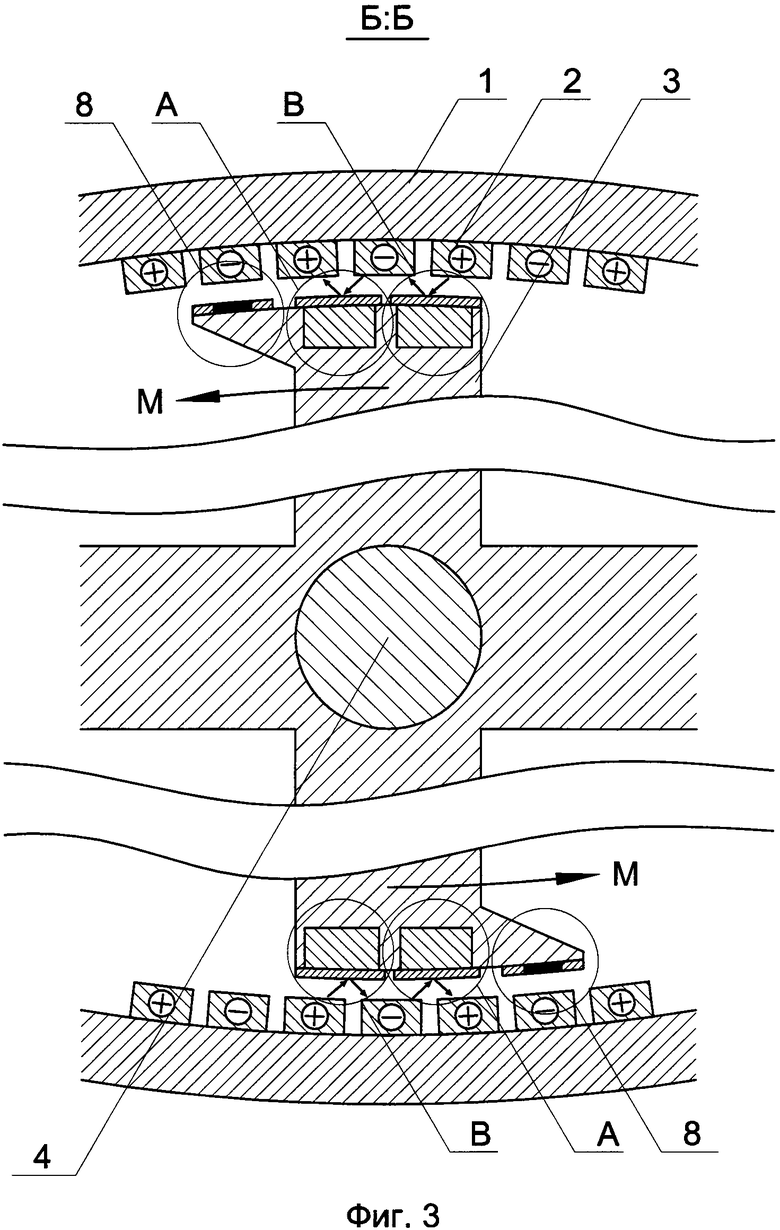
1. Лопастный электромагнитный движитель, характеризующийся тем, что он содержит корпус с установленными в нем магнитными элементами чередующейся полярности, представляющими собой вторичный элемент синхронной машины, лопасти, установленные внутри корпуса на оси вращения, посредством по меньшей мере одной центрирующей опоры, по меньшей мере два электромагнита, установленные на концевой части лопасти, представляющие собой первичный элемент синхронной машины, токосъемный узел электроснабжения электромагнитов, по меньшей мере один датчик положения ротора.
2. Лопастный электромагнитный движитель, по п. 1, отличающийся тем, что магнитные элементы чередующейся полярности, установленные в корпусе, выполнены в виде постоянных магнитов.
3. Лопастный электромагнитный движитель по п. 1, отличающийся тем, что магнитные элементы чередующейся полярности, установленные в корпусе, выполнены в виде электромагнитов.
4. Лопастный электромагнитный движитель по любому из пп. 1, 2, отличающийся тем, что лопасти, установленные параллельно на оси вращения, вращаются в противоположных направлениях.
5. Лопастный электромагнитный движитель по любому из пп. 1-3, отличающийся тем, что концевые части лопастей с установленными электромагнитами имеют в сечении Т-образный профиль.
6. Лопастный электромагнитный движитель по любому из пп. 1-4, отличающийся тем, что содержит механизм изменения угла установки лопастей.
7. Лопастный электромагнитный движитель по любому из пп. 1-5, отличающийся тем, что лопасть крепится на оси вращения посредством горизонтального шарнира.
8. Лопастный электромагнитный движитель по любому из пп. 1-6, отличающийся тем, что лопасть крепится на оси вращения посредством вертикального шарнира.
9. Лопастный электромагнитный движитель по любому из пп. 1-5, отличающийся тем, что лопасть крепится на оси вращения посредством упругого элемента.
10. Лопастный электромагнитный движитель по любому из пп. 1-4, отличающийся тем, что содержит по меньшей мере одну пару лопастей с электромагнитами и по меньшей мере одну пару лопастей без электромагнитов.
11. Лопастный электромагнитный движитель по любому из пп. 1-4, 9, отличающийся тем, что содержит по меньшей мере одну пару лопастей с электромагнитами и по меньшей мере одну пару лопастей без электромагнитов, при этом лопасти без электромагнитов содержат механизм изменения угла установки лопастей.
12. Лопастный электромагнитный движитель по любому из п 1-4, 9, 10, отличающийся тем, что лопасти без электромагнитов крепятся на оси вращения посредством горизонтальных шарниров.
13. Лопастный электромагнитный движитель по любому из пп. 1-4, 9, 10, 11, отличающийся тем, что лопасти без электромагнитов крепятся на оси вращения посредством вертикальных шарниров.
14. Лопастный электромагнитный движитель по любому из пп. 1-4, 9, 10, отличающийся тем, что лопасти без электромагнитов крепятся на оси вращения посредством упругого элемента.
15. Лопастный электромагнитный движитель по любому из пп. 1-13, отличающийся тем, что содержит датчик оборотов ротора.
16. Лопастный электромагнитный движитель по любому из пп. 1-14, отличающийся тем, что он встроен в конструкцию летательного или другого аппарата, фюзеляж, крыло или другой конструктивный элемент, и по меньшей мере один элемент движителя является конструктивной частью летательного или другого аппарата.
| КОМБИНИРОВАННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ - ГРЕБНОЙ ВИНТ | 1996 |
|
RU2115590C1 |
| 0 |
|
SU159376A1 | |
| БИОЛОГИЧЕСКИ АКТИВНЫЙ ПРОДУКТ ИЗ ОТХОДОВ ГЕЛИЦЕКУЛЬТУРЫ И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2023 |
|
RU2821344C1 |
| US 20110147511 A1, 23.06.2011 | |||
| US 20160023754 A1, 28.01.2016. | |||

