Изобретение относится к области море- воздухоплавания, в частности судостроения, а именно к конструкции движителя, который может применяться в качестве пропульсивного аппарата для судов или летательных аппаратов, сила тяги у которых обеспечивается за счет достижения удобообтекаемых поверхностей.
Известен способ создания силы тяги с помощью воздушного винта, в котором силу тяги получают в виде реакций отброшенного винтом потока воздуха. Лопасть винта, являющаяся вытянутым прямоугольником, движется поступательно и вращательно, соответственно поступательные и вращательные составляющие скорости, геометрическая сумма которых встречает лопасть под положительным углом атаки, создавая при этом силу тяги к конструкции (В. А. Александров. "Воздушные винты". - М., 1951).
Недостатком данного способа является непостоянство указанных скоростей, поэтому, чтобы заставить лопасть реализовывать наибольшую тягу при наименьшей затрате энергии, следует сечения лопасти укладывать под наивыгоднейшими углами атаки, то есть лопасть должна быть скручена. Но тем не менее эффективность скрученной лопасти сильно зависит от поступательной скорости.
Известен лопастной движитель для летательного аппарата тяжелее воздуха, содержащий приводной от силовой установки механизм, имеющий горизонтально расположенные поперек продольной оси фюзеляжа приводные валы, с которыми кинематически связаны лопасти, располагаемые при вращении в плоскости с постоянной угловой скоростью вокруг осей указанных валов с положительным углом атаки каждой лопасти навстречу движению (US, 5265827, В64С 29/00, 244-20, опубл. 30.11.1993).
В данном летательном аппарате подъемная сила формируется за счет вращения лопастей с постоянной угловой скоростью вокруг горизонтальной оси.
Недостатками данного летательного аппарата являются то, что лопасти совершают вращение в одной плоскости и поэтому вращаются в спутной струе, отчего эффект создания подъемной силы ухудшается, а также то, что управление положением лопастей по углу атаки осуществляется микропроцессором, что существенно усложняет конструкцию самого летательного аппарата.
Известен лопастной движитель для летательного аппарата, содержащий приводной от силовой установки механизм, имеющий по каждому борту горизонтально расположенный поперек продольной оси фюзеляжа приводной вал, с каждым из которых кинематически посредством тяг связаны лопасти, располагаемые в плоскости при вращении с постоянной угловой скоростью вокруг осей указанных валов с положительным углом атаки каждой лопасти навстречу движению, при этом для обеспечения вращения каждой лопасти по траектории объемной восьмерки типа лемнискаты по виду приводной механизм выполнен с функцией дополнительного вращения указанных лопастей по каждому борту с такой же угловой скоростью вокруг перпендикулярной к ним неподвижной оси, расположенной в указанной плоскости (RU, патент 2117605, В64С 29/00, опубл. 20.08.1998).
Недостатком данной конструкции является непостоянство возникновении силы тяги, а также большие инерционные силы.
Настоящее изобретение направлено на решение технической задачи по усовершенствованию способа и механизма получения силы тяги. Достигаемый при этом технический результат заключается в повышении эксплуатационной эффективности лопастного движителя.
Указанный технический результат достигается тем, что в лопастном движителе, содержащем приводной от силовой установки механизм, имеющий приводной вал, при этом приводной вал выполнен с крестовиной, приводной механизм представляет собой выполненный в корпусе конический редуктор, боковые шестерни которого, зацепленные с центральной шестерней, установлены с возможностью вращения на осях крестовины, а центральная шестерня зафиксирована неподвижно в опоре для корпуса, причем со ступицей каждой боковой шестерней кинематически связаны две лопасти, указанные лопасти выполнены плоскими, непосредственно соединены со ступицей соответствующей боковой шестерни и радиально направлены по отношению к оси вращения этой боковой шестерни, при этом плоскость одной лопасти расположена под прямым углом или под углом, близким к прямому к плоскости другой лопасти, а плоскости лопастей одной боковой шестерни расположены под прямым углом или под углом, близким к прямому, к плоскостям лопастей другой боковой шестерни.
Указанные признаки являются существенными и взаимосвязаны между собой с образованием совокупности существенных признаков, достаточной для получения требуемого технического результата.
Настоящее изобретение поясняется конкретным примером, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения приведенной совокупностью признаков требуемого технического результата.
На чертеже дана кинематическая схема лопастного движителя.
Согласно настоящему изобретению лопастной движитель (см. чертеж) содержит приводной от силовой установки механизм, имеющий приводной вал 1, который выполнен на одном конце с крестовиной 2 с осями.
Приводной механизм представляет собой выполненный в корпусе конический редуктор, боковые конические шестерни 3 которого, зацепленные с центральной конической шестерней 4, установлены с возможностью вращения на подшипниках на осях крестовины, а центральная шестерня 4 зафиксирована неподвижно в опоре 5 для корпуса. Со ступицей каждой боковой конической шестерни кинематически связаны две лопасти 6 и 7.
Лопасти в каждой паре выполнены плоскими, непосредственно соединены со ступицей соответствующей боковой конической шестерни и радиально направлены по отношению к оси вращения этой боковой шестерни. При этом плоскость одной лопасти 6 расположена под прямым углом или под углом, близким к прямому, к плоскости другой лопасти 7, а плоскости лопастей одной боковой шестерни расположены под прямым углом или под углом, близким к прямому, к плоскостям лопастей другой боковой шестерни.
Указанный механизм обеспечивает одновременное вращение лопастей вокруг оси приводного вала 1 и вращение лопастей вокруг оси крестовины.
При вращении приводного вала 1 закрепленная на нем крестовина 2 также вращается в направлении вращения этого вала. Смонтированные на осях крестовины боковые конические шестерни и соединенные с ними лопасти также вращаются в направлении вращения приводного вала. Но, так как центральная шестерня 4 зафиксирована от вращения, то свободно расположенные на осях крестовины боковые шестерни дополнительно вращаются вокруг оси вращения боковой шестерни. Таким образом указанный механизм обеспечивает одновременное вращение лопастей вокруг оси приводного вала 1 и вращение лопастей вокруг оси крестовины.
При использовании такого способа создания подъемной силы, например для летательного аппарата, траектория перемещения лопасти такова, что каждый раз в момент создания максимальной подъемной силы лопасть находится в невозмущенном потоке. Скорость перемещения лопасти максимальна в момент создания максимальной подъемной силы и уменьшается, когда лопасть находится в другой плоскости, поэтому в эти моменты сила сопротивления движению существенно уменьшается. Таким образом, предложенный способ, кроме того, что прост в изготовлении, еще и эффективен.
Настоящее изобретение промышленно применимо, так как для его создания не требуется специально разработанных новых технологий и специального оборудования, кроме того, что используется при создании редукторов и изготовлении летательных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2159726C1 |
| ДВИЖИТЕЛЬ | 2004 |
|
RU2263605C1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПОДЪЕМА И ДВИЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2388653C2 |
| СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ, НАПРИМЕР, ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2117605C1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ПОТОКА СРЕДЫ | 2004 |
|
RU2281412C1 |
| СУДОВОЙ ДВИЖИТЕЛЬ-КОНЦЕНТРАТОР | 2009 |
|
RU2438917C2 |
| СООСНЫЙ КОАКСИАЛЬНЫЙ ПРОПЕЛЛЕР (ВАРИАНТЫ) | 2009 |
|
RU2478522C2 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЛОПАСТНЫМИ УСТРОЙСТВАМИ | 2014 |
|
RU2599854C2 |
Изобретение касается конструкции лопастного движителя. Лопастной движитель содержит приводной вал 1 с крестовиной 2, конический редуктор, боковые шестерни 3 которого, зацепленные с центральной шестерней 4, установлены с возможностью вращения на осях крестовины 2. Центральная шестерня 4 зафиксирована неподвижно в опоре 5 для корпуса. Со ступицей каждой боковой шестерни кинематически связаны две лопасти 6, 7. Лопасти выполнены плоскими, непосредственно соединены со ступицей соответствующей боковой шестерни 3 и радиально направлены по отношению к оси вращения этой боковой шестерни. При этом плоскость одной лопасти расположена под прямым углом или под углом, близким к прямому, к плоскости другой лопасти, а плоскости лопастей одной боковой шестерни расположены под прямым углом или под углом, близким к прямому, к плоскостям соответствующих лопастей другой боковой шестерни. Технический результат заключается в повышении эксплуатационной эффективности лопастного движителя. 1 ил.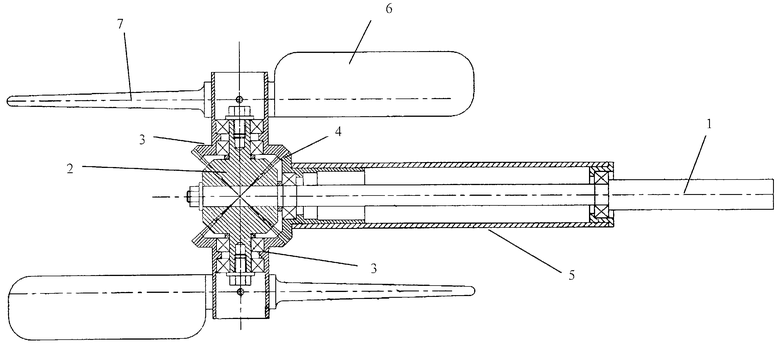
Лопастной движитель, содержащий приводной от силовой установки механизм, имеющий приводной вал, при этом приводной вал выполнен с крестовиной, приводной механизм представляет собой выполненный в корпусе конический редуктор, боковые шестерни которого, зацепленные с центральной шестерней, установлены с возможностью вращения на осях крестовины, а центральная шестерня зафиксирована неподвижно в опоре для корпуса, причем со ступицей каждой боковой шестерни кинематически связаны две лопасти, отличающийся тем, что указанные лопасти выполнены плоскими, непосредственно соединены со ступицей соответствующей боковой шестерни и радиально направлены по отношению к оси вращения этой боковой шестерни, при этом плоскость одной лопасти расположена под прямым углом или под углом, близким к прямому, к плоскости другой лопасти, а плоскости лопастей одной боковой шестерни расположены под прямым углом или под углом, близким к прямому, к плоскостям соответствующих лопастей другой боковой шестерни.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2159726C1 |
| СООСНЫЕ ГРЕБНЫЕ ВИНТЫ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ для СУДОВ | 0 |
|
SU312790A1 |
| US 5071378 А, 10.12.1991 | |||
| СПОСОБ РЕГЕНЕРАЦИИ ЛАМПЫ ВЫСОКОГО ДАВЛЕНИЯ | 1995 |
|
RU2094894C1 |

