ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к сенсорному устройству для измерения характеристик ротора, в частности, смещений ротора, и к устройству, оборудованному таким сенсорным устройством.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Бесконтактные электромагнитные датчики, в частности, датчики вихревых токов и индуктивные датчики (также называемые реактивными датчиками) часто используются для мониторинга смещений ротора в машинах и механизмах, таких как насосы и компрессоры. Контроль положения ротора имеет особое значение, если ротор подвешен на активных магнитных подшипниках, где требуется информация о положении для управления магнитными подшипниками.
Датчик вихревых токов обычно содержит преобразователь, подсоединенный к схеме обработки сигналов. Между преобразователем и схемой обработки сигнала может быть расположен многовыводной соединительный кабель. В некоторых вариантах выполнения настоящего изобретения преобразователь содержит одну измерительную катушку. Схема обработки сигналов содержит генератор сигнала, который возбуждает переменный ток высокой частоты в измерительной катушке, часто на частотах, превышающих 100 кГц. Высокочастотный ток создает переменное магнитное поле вокруг измерительной катушки, которое индуцирует вихревые токи в соседней электропроводящей мишени на роторе. Вихревые токи, в свою очередь, индуцируют в измерительной катушке электродвижущую силу (ЭДС), которая приводит к изменению импеданса преобразователя. Такие изменения импеданса обнаруживаются схемой обработки сигнала, чтобы обеспечить индикацию расстояния между датчиком и мишенью. С этой целью схема обработки сигнала может содержать аналоговый или цифровой демодулятор. Пример измерительной системы с одной катушкой с цифровым демодулятором раскрыт в патенте США №6664782. В этом документе также рассматриваются некоторые общие проблемы, связанные с преобразователями с одной катушкой.
Индуктивные датчики работают по очень похожему принципу, что и датчики вихревых токов. Тем не менее, рабочая частота индуктивных датчиков, как правило, ниже, чем рабочая частота датчиков вихревых токов, часто в диапазоне всего нескольких кГц. Мишень с высокой магнитной проницаемостью, например, ферромагнитная или ферримагнитная мишень, непосредственно влияет на собственную индуктивность измерительной катушки. В дальнейшем, датчики смещений на основе вихревых токов и индуктивные датчики смещений в совокупности будут называться бесконтактными электромагнитными датчиками смещений.
В некоторых применениях преобразователи бесконтактных электромагнитных датчиков смещений могут подвергаться воздействию неблагоприятных механических, физических и химических условий, таких как сильные вибрации, высокие температуры, высокие давления, высокая влажность или наличие химически агрессивных веществ. Значительные усилия были предприняты в известном уровне техники, чтобы получить герметичные преобразователи, способные выдерживать такие неблагоприятные условия. Пример раскрыт в патенте США №5818224. Тем не менее, диапазон рабочих условий, в которых могут использоваться такие герметичные преобразователи, ограничен, при этом конструктивные усилия по интеграции полностью герметичных преобразователей в устройства могут быть высокими.
Кроме того, датчики с преобразователями с одной катушкой чувствительны к ошибкам температуры вследствие температурных изменений импеданса не только преобразователя, но и соединительного кабеля. Изменение импеданса вследствие температурного дрейфа или изменения влажности могут быть ошибочно приняты за изменения импеданса в связи с изменением расстояния между преобразователем и мишенью. Это приводит к неточным измерениям расстояния. Проблема усугубляется в тех случаях, когда необходимо подключить схему формирования сигнала к преобразователю через довольно длинный соединительный кабель, как это может быть в случае больших вращающихся машин, таких как компрессоры или большие насосы, где длина кабеля может легко превысить 20 метров и может достигать 300 и более метров.
Некоторые из этих проблем были решены в предшествующем уровне техники с использованием преобразователей с несколькими катушками. Например, в патенте США №6803757 предлагается использовать преобразователь с несколькими катушками, включая измерительную катушку, катушку возбуждения и эталонную катушку. Генератор сигналов возбуждает катушку возбуждения, чтобы создать вихревые токи в мишени. Измерительная катушка расположена между катушкой возбуждения и мишенью, и выводит наведенное напряжение, которое зависит от расстояния между датчиком и мишенью. Эталонная катушка индуктивно соединена с катушкой возбуждения и не подвержена влиянию мишени. Сигналы от эталонной катушки подаются обратно в генератор сигналов, с тем, чтобы поддерживать магнитное поле, которое создается катушкой возбуждения, по существу постоянным. Для подсоединения преобразователя к оставшейся схеме требуется шесть проводов.
В патенте Великобритании №1295460 раскрыт датчик, в котором используется преобразователь с двойной катушкой. Измерительная катушка и эталонная катушка совмещены в аксиальном направлении в общем электропроводящем корпусе преобразователя, причем измерительная катушка расположена рядом с одним из концов корпуса, тогда как эталонная катушка находится на некотором расстоянии от этого конца. Измерительная катушка и эталонная катушка соединены последовательно, чтобы сформировать первое и второе плечи мостовой схемы. Третье и четвертое плечи мостовой схемы образованы последовательно соединенными, идентичными вторичными обмотками первого трансформатора. Средние выводы между каждой парой плеч соединены с первичной обмоткой второго трансформатора. Измерительная катушка и эталонная катушка обычно возбуждаются путем подачи тока на первичную обмотку первого трансформатора. Импеданс измерительной катушки зависит от наличия электропроводящей мишени вблизи первого конца, тогда как импеданс эталонной катушки остается в значительной степени не зависящим от наличия мишени. Это приводит к тому, что мостовая схема становится несбалансированной, что приводит к появлению напряжения переменного тока на первичной обмотке второго трансформатора. Результирующее напряжение на вторичной обмотке второго трансформатора определяется с помощью демодулятора. Для подсоединения датчика к оставшейся схеме необходимы по меньшей мере три провода. Датчик с подобной электрической схемой также описан в патенте США №3491289.
В патенте США №5617023 раскрыты различные варианты выполнения индуктивного датчика положения. В некоторых вариантах выполнения два преобразователя расположены на противоположных сторонах направляющей лифта. Каждый преобразователь содержит первичную обмотку и вторичную обмотку на общем магнитном сердечнике. Первичные обмотки соединены в последовательной конфигурации с генератором сигналов, а вторичные обмотки соединены во встречно-последовательной конфигурации с синхронным детектором. Таким образом, обнаруживается только разность напряжений, индуцируемых во вторичных обмотках. Для соединения двух катушек каждого преобразователя с оставшейся схемой необходимы четыре провода.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание бесконтактного электромагнитного сенсорного устройства, которое специально приспособлено для определения смещений вращающегося вала в роторной машине, причем сенсорное устройство имеет простую схему проводки и пригодно для использования с длинными кабелями.
Эта цель достигается с помощью сенсорного устройства, выполненного в соответствии с п.п. 1 или 10 формулы изобретения. Другие варианты выполнения изобретения изложены в зависимых пунктах формулы изобретения.
В первом аспекте настоящее изобретение обеспечивает сенсорное устройство для определения характеристик ротора, содержащее:
первую и вторую измерительные катушки, каждая из которых выполнена с возможностью взаимодействия с поверхностью ротора для обнаружения смещений ротора относительно первой и второй измерительных катушек; и
входной трансформатор, имеющий первичную обмотку и по меньшей мере первую и вторую вторичные обмотки, причем первичная обмотка входного трансформатора формирует вход для сигнала возбуждения;
при этом первая измерительная катушка, вторая измерительная катушка и вторичные обмотки входного трансформатора соединены с образованием мостовой схемы, причем мостовая схема содержит первое, второе, третье и четвертое плечи, где первое плечо содержит первую измерительную катушку, второе плечо содержит вторую измерительную катушку, причем первое плечо и второе плечо соединены последовательно с формированием между ними общей точки соединения, третье плечо содержит первую вторичную обмотку входного трансформатора, а четвертое плечо содержит вторую вторичную обмотку входного трансформатора, причем третье и четвертое плечи соединены последовательно с формированием между ними общей точки соединения,
причем общая точка соединения между первым и вторым плечами мостовой схемы соединена с первым контактом первого вывода для первого выходного сигнала, и
общая точка соединения между третьим и четвертым плечами мостовой схемы соединена со вторым контактом первого вывода.
Термин «вывод» следует интерпретировать в самом широком смысле, как относящийся к любой конструкции, которая обеспечивает возможность осуществлять электрическое соединение, предназначенное для считывания выходного сигнала. Вывод может, например, иметь форму соединителя, штепселя или пары паяных соединений, которые даже не должны быть смежными друг с другом.
При соединении двух измерительных катушек вторичных обмоток входного трансформатора в мостовой схеме, возбуждение и детектирование разделены. Сигнал возбуждения подается на первичную обмотку входного трансформатора, и только разностный сигнал детектируется в качестве выходного сигнала на выводе. Этот разностный сигнал отражает величину, на которую ротор смещен относительно двух измерительных катушек. Сигнал возбуждения может быть передан от генератора сигналов к первичной обмотке входного трансформатора через кабель. Аналогично, выходной сигнал может быть считан с вывода через кабель. Путем разделения (большого) возбуждающего напряжения и (сравнительно небольшого) разностного сигнала и передачи этих напряжения по кабелю по отдельности, чувствительность к изменениям импеданса кабеля значительно сокращается. Это дает возможность использовать длинные кабели.
Входной трансформатор также используется в патенте Великобритании №1295460. Тем не менее, важное отличие настоящего изобретения, по сравнению с этим документом, заключается в расположении и функции катушек, взаимодействующих с входным трансформатором: тогда как в патенте Великобритании №1295460 эти катушки представляют собой измерительную катушку и эталонную катушку одного преобразователя, причем только на измерительную катушку влияет движение мишени, а в настоящем изобретении обе катушки представляют собой измерительные катушки, которые выполнены с возможностью взаимодействия с ротором, предпочтительно с противоположно направленными поверхностями ротора. Таким образом, ротор образует мишень для обеих измерительных катушек. На импеданс (в особенности, индуктивности) измерительных катушек с противоположным знаком предпочтительно влияют перемещения этой мишени вдоль заранее заданного направления, то есть, если мишень перемещается в заданном направлении, импеданс одной из измерительных катушек увеличивается, тогда как импеданс другой измерительной катушки уменьшается. Чтобы обеспечить возможность размещения измерительных катушек близко к ротору, каждая из измерительных катушек может, например, быть частью отдельного преобразователя, причем преобразователи выполнены с возможностью индивидуального позиционирования относительно ротора. В других вариантах выполнения измерительные катушки могут быть расположены на общем носителе, например, на общей печатной плате, которая имеет такую форму, чтобы обеспечить возможность размещения катушек близко к ротору. Настоящее изобретение не ограничивается конкретной конфигурацией измерительных катушек, до тех пор, пока они могут быть размещены таким образом, чтобы взаимодействовать с ротором, и, предпочтительно, с противоположно направленными поверхностями ротора.
Термин «взаимодействие с противоположно направленными поверхностями ротора» следует понимать как охватывающий любую ситуацию, в которой измерительные катушки взаимодействуют с поверхностями, нормали к которым направлены в противоположных направлениях. Поверхности могут, например, представлять собой радиально противоположные части внешней периферийной поверхности вала ротора, для обнаружения радиальных смещений. В этом случае измерительные катушки располагают на противоположных радиальных сторонах вала ротора. В случае полого ротора поверхности могут представлять собой радиально противоположные части внутренней периферийной поверхности ротора. В этом случае обе измерительные катушки располагают внутри полого ротора направленными радиально противоположно. В других вариантах выполнения измерительные катушки для обнаружения аксиальных смещений могут, например, быть расположены на аксиально противоположных поверхностях упорного диска.
В других вариантах выполнения изобретения каждая из измерительных катушек может, например, быть расположена на аксиально противоположных сторонах периферийной кромки на периферийной поверхности вала ротора, причем указанная кромка отделяет две области на валу ротора, которые имеют различные магнитные восприимчивости или электропроводности, для обнаружения аксиальных смещений ротора. В частности, могут быть предусмотрены две периферийных кромки, разграничивающие кольцо материала мишени, который имеет чувствительность, отличающуюся от чувствительности смежного материала ротора, или кромки, разграничивающие периферический паз или выступающее в радиальном направлении кольцо. Дополнительная измерительная катушка может быть соединена последовательно с каждой из первой и второй катушки измерительными катушками и может быть расположена в радиально противоположной конфигурации от соответствующей измерительной катушки, так что каждое плечо из первого и второго плеч мостовой схемы содержит две последовательно соединенных измерительных катушки, выполненные с возможностью взаимодействия с радиально противоположно направленными поверхностями ротора. Радиальные смещения ротора будут влиять на импедансы последовательно соединенных катушек в каждом плече с противоположным знаком, компенсируя влияние радиальных смещений на выходной сигнал. Таким образом, обнаруживаются только осевые смещения.
Входной трансформатор может использоваться для согласования импеданса мостовой схемы, преобразуемого трансформаторами, и характеристического импеданса (волнового сопротивления) кабелей. Это обеспечивает возможность использования измерительных катушек, которые специально адаптированы к конкретному приложению, без того, чтобы согласовывать импедансы самих измерительных катушек с кабелями. Например, могут использоваться измерительные катушки с малым количеством витков и толстые изолирующие слои. Таким образом, становится возможной более прочная конструкция преобразователя.
Дополнительные элементы согласования импеданса, в частности, конденсаторы, могут быть подсоединены к входным трансформатором для улучшения согласования импеданса. Элементы для согласования импеданса могут содержать по меньшей мере один конденсатор, соединенный параллельно с первичной обмоткой или с по меньшей мере одной из вторичных обмоток входного трансформатора. Может использоваться один единственный конденсатор, подсоединенный параллельно первичной или последовательно соединенным вторичным обмоткам. Тем не менее, также существует возможность использовать более сложные согласующие конструкции, образованные большим количеством конденсаторов и/или индуктивностей, например, в виде L-, Т- или Pi-структур, как это само по себе хорошо известно в области высокочастотной электроники.
Особенно предпочтительно подключать такие элементы ко вторичным обмоткам входного трансформатора для достижения согласования импеданса в первичной обмотке. В частности, сенсорное устройство может содержать:
входной кабель, подсоединенный к первичной обмотке входного трансформатора, причем входной кабель имеет первый характеристический импеданс; и
по меньшей мере один элемент согласования импеданса, подсоединенный к первой и/или ко второй вторичной обмотке входного трансформатора, для согласования входного импеданса первичной обмотки входного трансформатора и характеристического импеданса входного кабеля.
Вместо этого, или в дополнение к этому, можно использовать элементы согласования импеданса, которые подсоединены к первичной обмотке входного трансформатора.
Элементы согласования импеданса предпочтительно расположены в непосредственной близости от входного трансформатора. В частности, если входной трансформатор отделен от измерительных катушек стенкой, например, стенкой корпуса машины, то предпочтительно, чтобы элементы согласования импеданса были расположены на той же стороне от стенки, что и входной трансформатор. Тем не менее, если элементы согласования импеданса подсоединены к вторичной стороне входного трансформатора, то также возможно расположить элементы согласования импеданса в непосредственной близости от измерительных катушек, в частности, на той же самой стороне разделительной стенки, на которой расположены измерительные катушки.
В дополнение к входному кабелю или вместо него, могут использоваться передающие кабели для подсоединения вторичных обмоток входного трансформатора (т.е. третьего и четвертого плеча мостовой схемы) к измерительным катушкам (т.е. к первому и ко второму плечу мостовой схемы). Импеданс элементов, подсоединенных к дальнему концу передающих кабелей, предпочтительно должен быть согласован с характеристическим импедансом передающих кабелей. Опять же, для этой цели могут использоваться элементы согласования импеданса, такие как конденсаторы. В частности, устройство может содержать:
первый передающий кабель, имеющий первый конец и второй конец, причем первый конец соединен с третьим плечом мостовой схемы, а второй конец соединен с первым плечом мостовой схемы, при этом первый передающий кабель имеет первый характеристический импеданс;
второй передающий кабель, имеющий первый конец и второй конец, причем первый конец соединен с четвертым плечом мостовой схемы, а второй конец соединен с вторым плечом мостовой схемы, при этом второй передающий кабель имеет второй характеристический импеданс; и
причем один или несколько элементов согласования импеданса соединен со вторыми концами первого и второго передающих кабелей для согласования входных импедансов в первом и во втором плечах мостовой схемы и характеристических импедансов первого и второго передающих кабелей.
Опять же, элементы согласования импеданса предпочтительно расположены в непосредственной близости от вторых концов передающих кабелей. В частности, если эти концы отделены от измерительных катушек стенкой, то предпочтительно, чтобы элементы согласования импеданса были расположены на той же самой стороне стенки, что и концы кабелей. Тем не менее, также возможно расположить элементы согласования импеданса в непосредственной близости от измерительных катушек, в частности, на той же самой стороне разделительной стенки, на которой расположены измерительные катушки.
Тогда как можно непосредственно передавать выходной сигнал из вывода в схему детектирования, предпочтительно сначала преобразовать этот выходной сигнал с помощью выходного трансформатора. С этой целью сенсорное устройство может содержать первый выходной трансформатор, имеющий первичную обмотку и вторичную обмотку, причем первичная обмотка первого выходного трансформатора соединена с первым и вторым контактом первого вывода.
Если выходной кабель подсоединен ко вторичной обмотке выходного трансформатора, выходной импеданс на вторичной обмотке выходного трансформатора должен снова предпочтительно быть согласован с характеристическим импедансом выходного кабеля. Согласование импедансов может снова быть улучшено за счет использования элементов согласования импеданса, в частности, одного или несколько конденсаторов. Целесообразно добиться согласования импедансов путем подсоединения элементов согласования импеданса ко входу выходного трансформатора. Более конкретно, сенсорное устройство может содержать:
выходной кабель, подсоединенный ко вторичной обмотке первого выходного трансформатора и имеющий характеристический импеданс; и
один или несколько элементов согласования импеданса, подсоединенных к первичной обмотке выходного трансформатора, для согласования выходного импеданса на вторичной обмотке выходного трансформатора и характеристического импеданса выходного кабеля.
Кроме того, или в качестве альтернативы, можно также подсоединить элементы согласования импеданса ко вторичной обмотке выходного трансформатора. Элементы согласования импеданса предпочтительно содержат конденсатор, соединенный параллельно с первичной или вторичной обмоткой выходного трансформатора. Тем не менее, возможны и другие варианты выполнения, как обсуждалось выше в связи с возможностью согласования импеданса на входном трансформаторе.
Опять же, элементы согласования импеданса предпочтительно расположены в непосредственной близости от выходного трансформатора. В частности, если выходной трансформатор отделен от измерительных катушек стенкой, то предпочтительно, чтобы элементы согласования импеданса были расположены на той же самой стороне стенки, что и выходной трансформатор. Тем не менее, если элементы согласования импеданса подсоединены к первичной обмотке выходного трансформатора, также возможно расположить элементы согласования импеданса в непосредственной близости от измерительных катушек, в частности, на той же стороне разделительной стенки, на которой расположены измерительные катушки.
Если не используется ни один выходной трансформатор, или же если выходной трансформатор расположен в удалении от измерительных катушек, то выходной сигнал может быть передан из вывода к схеме детектирования или к выходному трансформатору через выходной кабель. С этой целью сенсорное устройство может содержать:
выходной кабель, имеющий характеристический импеданс и содержащий первый проводник и второй проводник, каждый из которых имеет первый и второй концы, при этом первый конец первого проводника соединен с первым контактом первого вывода (или, что эквивалентно, с общей точкой соединения между первым и вторым плечами мостовой схемы), а первый конец второго проводника соединен со вторым контактом первого вывода (или, что эквивалентно, с общей точкой соединения между третьим и четвертым плечами мостовой схемы); и
один или несколько элементов согласования импеданса, подключенных к первому концу первого проводника и ко второму концу второго проводника, чтобы согласовывать выходной импеданс мостовой схемы на первом выводе и характеристический импеданс выходного кабеля.
Опять же, элементы согласования импеданса предпочтительно расположены в непосредственной близости от первого конца проводников кабеля. В частности, если вывод отделен от измерительных катушек стенкой, то предпочтительно, чтобы элементы согласования импеданса были расположены на той же самой стороне стенки, что и вывод. Тем не менее, также возможно расположить элементы согласования импеданса в непосредственной близости от измерительных катушек, в частности, на той же стороне разделительной стенки, на которой расположены измерительные катушки. Как уже говорилось выше, элементы согласования импеданса могут содержать один или несколько конденсаторов и/или индуктивностей.
Как описано выше, предпочтительно согласовывать выходные импедансы некоторых или всех источников сигнала, которые подключены к кабелям, и входные импедансы некоторых или всех нагрузок, которые подключены к кабелю, с характеристическим импедансом соответствующего кабеля. Без такого согласования импеданса, на входе и/или на выходе кабеля будут происходить отражения и, как следствие, потери при передаче. Кроме того, поведение всей измерительной схемы будет сильно зависеть от длины кабеля. Такие проблемы особенно сильно ощущаются в измерительных системах с одной катушкой из предшествующего уровня техники, в которых согласование импедансов на том конце кабеля, где расположен преобразователь, как правило, не представляется возможным. Сигналы от генератора сигналов, таким образом, отражаются на границе раздела между кабелем и преобразователем и непосредственно достигают схему детектирования. Эти отражения могут быть учтены с помощью калибровки; тем не менее, этот вид компенсации не будет работать, если импеданс кабеля изменяется после калибровки, из-за изменений условий окружающей среды. Этот эффект особенно заметен при использовании длинных кабелей. Настоящее изобретение разделяет пути передачи для возбуждения и детектирования и обеспечивает возможность согласования импеданса для обоих путей передачи, сводя, тем самым, к минимуму отражения и потери при передаче. Отражений нельзя избежать полностью из-за допусков, связанных с кабелями. Тем не менее, отраженные сигналы, поступающие от генератора сигналов, больше не отражаются обратно в схему детектирования, из-за разделенных путей передачи. Кабели по-прежнему будут приводить к фазовому сдвигу из-за задержки распространения в кабеле; тем не менее, такой фазовый сдвиг не сильно зависит от параметров окружающей среды, таких как температура и влажность, и может быть легко компенсирован.
В контексте настоящего изобретения, входной импеданс нагрузки или выходной импеданс источника сигнала считаются согласованными с номинальным характеристическим импедансом кабеля, если разность между абсолютными значениями входного/выходного импеданса и номинальным характеристическим импедансом кабеля составляет менее 20%, более предпочтительно менее 10%, от номинального характеристического импеданса, и если реактивная составляющая входного/выходного импеданса меньше, чем 20%, более предпочтительно меньше чем 10% от абсолютной величины номинального характеристического импеданса. Например, входной или выходной импеданс считается согласованным с кабелем, имеющим характеристический импеданс 50 Ом, если абсолютное значение входного/выходного импеданса составляет от 40 до 60 Ом, более предпочтительно от 45 до 55 Ом, и если реактивная составляющая (мнимая часть комплексного импеданса) составляет менее 10 Ом, более предпочтительно менее 5 Ом. Поскольку допуски на импеданс типичных кабелей находятся в диапазоне 10%, согласование импедансов лучше чем 10% будет разумным только тогда, когда используются специальные кабели с особо низкими допусками.
Входной трансформатор и выводы (и, если это применимо, также выходной трансформатор) могут быть пространственно отделены от измерительных катушек стенкой, например, стенкой корпуса машины, в которой расположены измерительные катушки. В такой ситуации сенсорное устройство может содержать проходные соединители для подачи электрических сигналов через стенку. Только три таких проходных соединителя необходимы для подсоединения двух измерительных катушек к входному трансформатору и выводу: Первый проходной соединитель соединяет «свободный» конец первого плеча мостовой схемы (т.е. тот конец первого плеча, который не соединен с общей точкой соединения вторым плечом) со «свободным» концом третьего плеча (т.е. с тем концом третьего плеча, который не соединен с общей точкой соединения четвертого плеча). Следует напомнить, что первое плечо представляет собой плечо, которое содержит первую измерительную катушку, а третье плечо представляет собой плечо, которое содержит первую вторичную обмотку входного трансформатора. Второй проходной соединитель соединяет «свободный» конец второго плеча (т.е. тот конец, который не соединен с первым плечом) со «свободным» концом четвертого плеча (т.е. с тем концом, который не соединен с третьим плечом). Следует напомнить, что второе плечо представляет собой плечо, которое содержит вторую измерительную катушку, а четвертое плечо представляет собой плечо, которое содержит вторую вторичную обмотку входного трансформатора. Третий проходной соединитель соединяет общую точку соединения между первым плечом и вторым плечом (точку, к которой подсоединены первая и вторая измерительные катушки) с первым контактом первого вывода. Все остальные соединения могут быть завершены без прохождения через стенку. В частности, соединения первого плеча и второго плеча (с измерительными катушками) с их общей точкой соединения могут быть завершены на одной стороне стенки, а соединение точки, общей для первой и второй вторичных обмоток входного трансформатора, со вторым контактом первого вывода может быть завершено с другой стороны стенки.
Эти проходные соединители могут быть реализованы различным образом, поскольку они известны в данной области техники. Например, проходные соединители могут быть реализованы в виде одного или нескольких многоконтактных соединителей, которые удерживаются в отверстии стенки, причем каждый штырь каждого соединителя образует один проходной соединитель.
Сенсорное устройство может быть расширено с помощью второй пары измерительных катушек. С этой целью сенсорное устройство может содержать третью и четвертую измерительные катушки. Мостовая схема может иметь пятое и шестое плечо, соединенные последовательно, образуя общую точку соединения между ними, причем пятое плечо содержит третью измерительную катушку, а шестое плечо содержит четвертую измерительную катушку. Общая точка соединения между пятым и шестым плечами мостовой схемы может затем быть соединена с первым контактом второго вывода для второго выходного сигнала.
В этой конструкции вторая пара измерительных катушек имеет входной трансформатор, общий с первой парой измерительных катушек. Таким образом получают два независимых измерительных канала при наличии лишь одного входного трансформатора.
Если измерительные катушки отделены от входного трансформатора и вывода стенкой, то для присоединения четырех измерительных катушек к входному трансформатору и к выводам необходимы только четыре проходных соединителя: Первый проходной соединитель соединяет точку, общую для первого плеча мостовой схемы (содержащего первую измерительную катушку) и пятого плеча (содержащего третью измерительную катушку), со «свободным» концом третьего плеча (содержащего первую вторичную обмотку входного трансформатора). Второй проходной соединитель соединяет точку, общую для второго плеча (содержащего вторую измерительную катушку) и шестого плеча (содержащего четвертую измерительную катушку) со «свободным» концом четвертого плеча (содержащего вторую вторичную обмотку входного трансформатора). Третий проходной соединитель соединяет точку, общую для первого плеча и второго плеча, с первым контактом первого вывода. Четвертый проходной соединитель соединяет точку, общую для пятого плеча и шестого плеча, с первым контактом второго вывода. Все остальные соединения могут быть завершены без прохождения через стенку. В частности, все соединения между первым, вторым, пятым и шестым плечами (в составе измерительных катушек) могут быть выполнены на одной стороне стенки, а соединение точки, общей для третьего и четвертого плеч (содержащих первую и вторую вторичные обмотки входного трансформатора), со вторым контактом первого и второго выводов может быть завершена по другую сторону стенки. Точки, общие для третьего и четвертого плеч и вторые контакты первого и второго выводов физически даже могут представлять собой одну и ту же конструкцию.
Это может быть обобщено на N измерительных каналов с 2N плечами с измерительными катушками, где N>1. Для соединения 2N плеч, содержащих измерительные катушки на одной стороне стенки, с одним входным трансформатором и N выводами по другую сторону стенки требуется только N + 2 проходных соединителей.
Функции входных и выходных трансформаторов также могут быть взаимозаменяемыми, когда входной трансформатор выступает в качестве выходного трансформатора, и наоборот. Таким образом, настоящее изобретение также обеспечивает сенсорное устройство для определения характеристик ротора, содержащее:
первую и вторую измерительные катушки, причем каждая из измерительных катушек выполнена с возможностью взаимодействия с поверхностью ротора для детектирования смещений ротора относительно первой и второй измерительных катушек, и
входной трансформатор, имеющий первичную обмотку и вторичную обмотку, причем первичная обмотка входного трансформатора формирует вход для сигнала возбуждения, и
первый выходной трансформатор, имеющий по меньшей мере первую и вторую первичные обмотки и вторичную обмотку, причем вторичная обмотка формируют первый вывод для первого выходного сигнала,
причем первая измерительная катушка, вторая измерительная катушка и первичные обмотки первого выходного трансформатора соединены с формированием первой мостовой схемы,
при этом первая мостовая схема содержит первое, второе, третье и четвертое плечи, причем первое плечо содержит первую измерительную катушку, второе плечо содержит вторую измерительную катушку, первое плечо и второе плечо соединены последовательно, образуя между собой общую точку соединения, третье плечо содержит первую первичную обмотку (251) первого выходного трансформатора, а четвертое плечо содержит вторую первичную обмотку первого выходного трансформатора, причем третье плечо и четвертое плечо соединены последовательно, образуя между собой общую точку соединения, и
при этом вторичная обмотка входного трансформатора подсоединена между общей точкой соединения первого и второго плеч первой мостовой схемы и общей точкой соединения третьего и четвертого плеч первой мостовой схемы.
Все соображения относительно кабелей и согласования импедансов на концах любых кабелей, как обсуждалось выше, также применимы к этому варианту выполнения. В частности, входной кабель может быть подсоединен к первичной обмотке входного трансформатора. Входной импеданс на первичной обмотке входного трансформатора тогда предпочтительно согласован с характеристическим импедансом входного кабеля. Для улучшения согласования по меньшей мере один элемент согласования импеданса может быть подсоединен к первичной или вторичной обмотке входного трансформатора. Устройство может дополнительно содержать выходной кабель, соединенный со вторичной обмоткой первого выходного трансформатора. Выходной импеданс на вторичной обмотке первого выходного трансформатора тогда предпочтительно согласован с характеристическим импедансом выходного кабеля. Для улучшения согласования по меньшей мере один элемент согласования импеданса может быть соединен с первой и/или второй первичной обмоткой или со вторичной обмоткой первого выходного трансформатора.
Если трансформаторы отделены от измерительных катушек стенкой, снова необходимы только три проходных соединителя через стенку для соединения двух измерительных катушек с двумя трансформаторами: Первый проходной соединитель соединяет точку, общую для первого и второго плеч мостовой схемы (эти плечи содержат измерительные катушки) с одним концом вторичной обмотки входного трансформатора. Второй проходной соединитель соединяет "свободный" конец первого плеча (содержащего первую измерительную катушку) со "свободным" концом третьего плеча (содержащего первую первичную обмотку первого выходного трансформатора), а третий проходной соединитель соединяет "свободный "конец второго плеча (содержащего вторую измерительную катушку) со "свободным" концом четвертого плеча (содержащего вторую первичную обмотку первого выходного трансформатора). Все остальные соединения могут снова быть завершены без прохождения через стенку. В частности, соединение между первым и вторым плечами (в частности, между измерительными катушками) может быть выполнено на одной стороне стенки, тогда как соединение между другим концом вторичной обмотки входного трансформатора и точкой, общей для третьего и четвертого плеч (содержащих первую и вторую первичные обмотки первого выходного трансформатора) может быть выполнено с другой стороны стенки.
Если требуется более одного измерительного канала, сенсорное устройство снова может быть расширено за счет выполнения дополнительных пар измерительных катушек и связанных с ними дополнительных выходных трансформаторов. В частности, сенсорное устройство может содержать:
третью и четвертую измерительные катушки и второй выходной трансформатор, имеющий по меньшей мере первую и вторую первичные обмотки,
причем указанная третья измерительная катушка, указанная четвертая измерительная катушка и первичные обмотки второго выходного трансформатора соединены с образованием второй мостовой схемы,
при этом вторая мостовая схема содержит первое, второе, третье и четвертое плечи, причем первое плечо содержит третью измерительную катушку, второе плечо содержит четвертую измерительную катушку, первое плечо и второй плечо соединены последовательно, образуя между собой общую точку соединения, третье плечо содержит первую первичную обмотку второго выходного трансформатора, а четвертое плечо содержит вторую первичную обмотку второго выходного трансформатора, третье и четвертое плечи соединены последовательно образуя между собой общую точку соединения, и
общая точка соединения первого и второго плеч второй мостовой схемы соединена с общей точкой соединения первого и второго плеч первой мостовой схемы, а общая точка соединения третьего и четвертого плеч второй мостовой схемы соединена с общей точкой соединения третьего и четвертого плеч первой мостовой схемы.
Таким образом, снова получают два независимых измерительных канала, только с тремя, вместо четырех трансформаторов.
Если измерительные катушки отделены от трансформаторов стенкой, то для соединения четырех измерительных катушек с тремя трансформаторами необходимо иметь пять проходных соединителей: Первый проходной соединитель соединяет общую точку соединения первого и второго плеч первой мостовой схемы и общую точку соединения первого и второго плеч второй мостовой схемы с одним концом вторичной обмотки входного трансформатора. Второй проходной соединитель соединяет "свободный конец" первого плеча первой мостовой схемы со "свободным концом" третьего плеча первой мостовой схемы. Третий проходной соединитель соединяет "свободный конец" второго плеча первой мостовой схемы со "свободным концом" четвертого плеча первой мостовой схемы. Четвертый проходной соединитель соединяет "свободный конец" первого плеча второй мостовой схемы со "свободным концом" третьего плеча второй мостовой схемы; и пятый проходной соединитель соединяет "свободный конец" второго плеча второй мостовой схемы со "свободным концом" четвертого плеча второй мостовой схемы. Все остальные соединения могут снова быть выполнено без прохождения через стенку.
Все это также может быть обобщено на N измерительных каналов с 2N плечами с измерительными катушками. Для соединения 2N плеч, содержащих измерительные катушки на одной стороне стенки, с одним единственным входным трансформатором и с N выходных трансформаторов с другой стороны стенки, необходимо иметь только 2N + 1 проходных соединителей.
Во всех этих вариантах выполнения устройство может дополнительно содержать схему обработки сигнала, в том числе:
генератор сигналов, функционально соединенный с первичной обмоткой входного трансформатора для возбуждения переменного тока в первичной обмотке входного трансформатора; и
первую схему детектирования, функционально соединенную с первым выводом (возможно, через соответствующий выходной трансформатор), причем первая схема детектирования выполнена с возможностью обработки первого выходного сигнала, полученного от первого вывода, чтобы получить обработанный выходной сигнал, который свидетельствует о смещении ротора относительно первой и второй измерительных катушек.
Если сенсорное устройство содержит третью и четвертую измерительные катушки, как описано выше, то схема обработки сигнала дополнительно содержит вторую схему детектирования, функционально соединенную со вторым выводом для получения второго выходного сигнала.
Как первая, так и вторая схема детектирования может содержать демодулятор, принимающий, в качестве входных сигналов, выходной сигнал соответствующего выходного трансформатора, и несущий сигнал от генератора сигналов. Как первая, так и вторая схема детектирования может содержать фазовращатель для сдвига фазы несущего сигнала относительно фазы выходного сигнала соответствующего выходного трансформатора. Демодулятор может содержать смеситель (т.е. умножитель) с последующим низкочастотным фильтром. Демодулятор может быть реализован с помощью цифровой электроники. С этой целью демодулятор может содержать аналого-цифровые преобразователи для преобразования выходного сигнала каждого выходного трансформатора в двоичный сигнал. Аналогичным образом, генератор сигналов может содержать цифровой генератор для создания двоичного сигнала частоты, и цифро-аналоговый преобразователь для преобразования двоичного сигнала частоты в аналоговый сигнал возбуждения для входного трансформатора.
Схема обработки сигналов может быть расположена на удалении от трансформаторов, и по меньшей мере один кабель может проходить между (i) схемой обработки сигналов и (ii) выводами и трансформаторами. Могут использоваться отдельные кабели (например, коаксиальные кабели или кабели с витыми парами), либо один кабель с отдельными парами проводов (например, два коаксиальных провода или две витых пары в одной оболочке, экранированные друг от друга с помощью соответствующих средств экранирования. Сенсорное устройство может содержать один или несколько соединителей или другие средства для разъемного соединения одного или нескольких кабелей, причем соединители электрически соединены с первичной обмоткой входного трансформатора и с выводами или со вторичными обмотками каждого выходного трансформатора. Трансформаторы могут быть размещены в соединительной коробке, расположенной вместе с этими соединительными средствами.
Как уже упоминалось, коэффициент преобразования входных и выходных трансформаторов может быть выбран таким образом, что входной импеданс входного трансформатора и/или выходной импеданс выходного трансформатора согласованы с характеристическим импедансом кабеля. Аналогично, входные и выходные импедансы схемы обработки сигналов могут быть согласованы с соответствующими импедансами кабеля. Таким образом могут быть сведены к минимуму отражения и потери на границе раздела между мостовой схемой (схемами) и кабелями, а также на границе раздела между схемой обработки сигналов и кабелями. Могут использоваться дополнительные элементы согласования импеданса, например, конденсаторы могут быть подсоединены параллельно обмоткам трансформатора.
Для того чтобы компенсировать потери в кабелях между генератором сигнала и первичной обмоткой входного трансформатора, входной трансформатор может содержать вспомогательную вторичную обмотку для измерения амплитуды потока в сердечнике входного трансформатора. Схема обработки сигнала может тогда содержать вспомогательную схему детектирования, функционально соединенную со вспомогательной обмоткой для получения опорного сигнала, который указывает на амплитуду потока и, следовательно, на амплитуду переменного тока в первичной обмотке. Схема обработки сигнала может дополнительно содержать делитель для деления выходного сигнала первой и/или второй схем детектирования на опорный сигнал. В других вариантах выполнения опорный сигнал может использоваться для управления выходом генератора сигналов таким образом, что переменный ток в первичной обмотке входного трансформатора имеет заранее заданную амплитуду. Вспомогательное измерение входного сигнала трансформатора также может использоваться для измерения фазового сдвига из-за задержки распространения сигнала в кабеле. Это измерение может использоваться для корректировки фазы демодуляции сигнала. Если между вспомогательной второй обмоткой входного трансформатора и схемой обработки сигнала используется кабель, то вспомогательная вторичная обмотка может быть соединена с кабелем через резистор, последовательно соединенный со вспомогательной вторичной обмотки, или посредством другого элемента согласования импеданса так, чтобы согласовать характеристический импеданс кабеля.
Изобретение также предлагает устройство, содержащее корпус и ротор, подвешенный в корпусе с возможностью вращения вокруг оси вращения, при этом устройство содержит сенсорное устройство, как описано выше. Предпочтительно, плечи мостовой схемы (схем), которые содержат измерительные катушки, расположены внутри корпуса, тогда как трансформаторы и выводы расположены снаружи корпуса. Проходные соединители через стенки корпуса предназначены для соединения плеч, содержащих измерительные катушки внутри корпуса, с трансформаторами и выводами снаружи корпуса.
Трансформаторы могут быть размещены в соединительной коробке, а соединительная коробка может быть установлена непосредственно на корпусе устройства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предпочтительные варианты выполнения настоящего изобретения описаны ниже со ссылками на прилагаемые чертежи, которые приведены только для иллюстрации настоящих предпочтительных вариантов выполнения изобретения, а не с целью их ограничения. На чертежах:
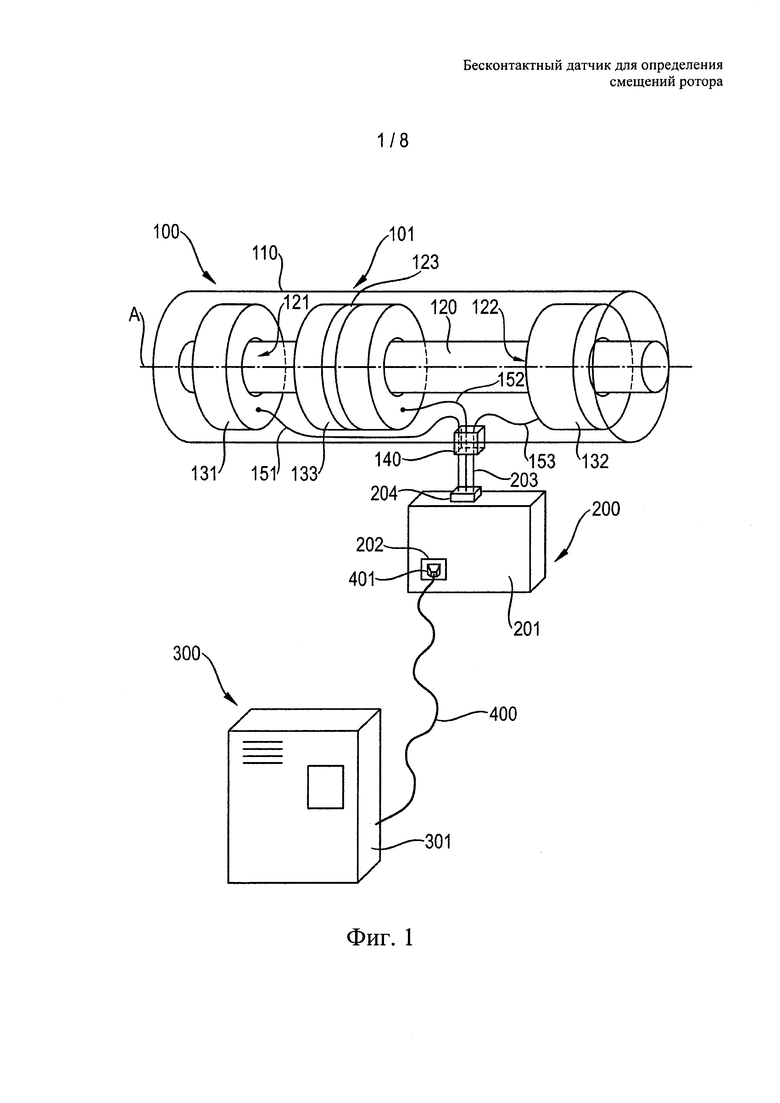
Фиг. 1 показывает, в сильно схематичном представлении, вращающуюся машину, в которой используется устройство магнитных подшипников;
Фиг. 2 показывает схему подключения сенсорного устройства, в соответствии с первым вариантом выполнения;
Фиг. 3 показывает схему подключения варианта сенсорного устройства, изображенного на Фиг. 2, с дополнительными измерительными каналами;
Фиг. 4 показывает схему подключения сенсорного устройства, в соответствии со вторым вариантом выполнения;
Фиг. 5 показывает аксиальный датчик;
Фиг. 6 и 7 показывают два варианта импульсного датчика;
Фиг. 8 показывает другой вариант выполнения аксиального датчика;
Фиг. 9 показывает схему подключения еще одного варианта сенсорного устройства, изображенного на Фиг. 2, без выходных трансформаторов; и
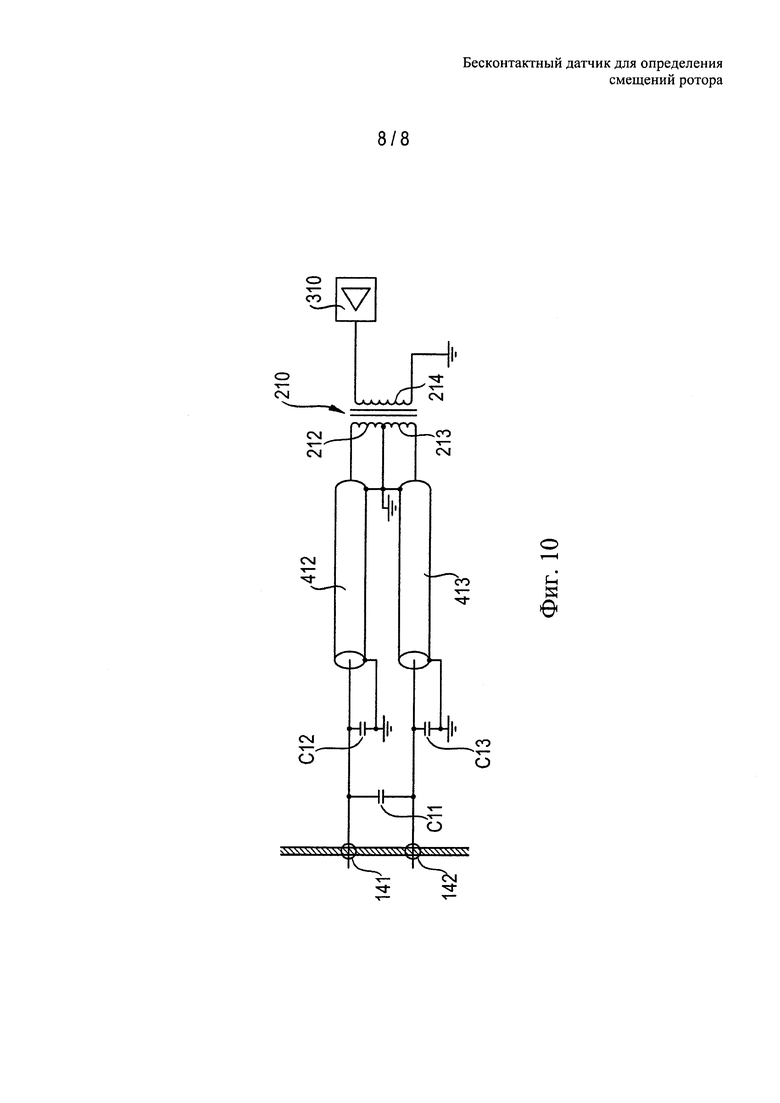
Фиг. 10 показывает схему подключения еще одного варианта сенсорного устройства, изображенного на Фиг. 2, с кабелями передачи с согласованными импедансами, между входным трансформатором и проходными соединителями через стенку корпуса.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
На Фиг. 1 схематично показана установка ротационной машины 100, в которой используется магнитный подшипник. Ротационная машина может представлять собой, например, вакуумный насос, компрессор, электрический генератор и т.д. Ротационная машина содержит корпус 101, имеющий стенку 110. В корпусе 101 подвешен ротор 120, выполненный с возможностью вращения вокруг оси А вращения. С этой целью вокруг частей 121, 122 вала ротора расположены два активных радиальных магнитных подшипника 131, 132, а на обеих сторонах упорного диска 123 расположен активный упорный магнитный подшипник 133. Такие магнитные подшипники известны в данной области техники и не показаны подробно на Фиг. 1. Для управления активными магнитными подшипниками 131, 132, 133, радиальное положение частей 121, 122 вала и аксиальное положение упорного диска 123 должны отслеживаться. С этой целью, в непосредственной близости от участков 121, 122 вала и упорного диска 123 расположены преобразователи для датчиков радиальных и аксиальных смещений. Эти преобразователи не показаны на Фиг. 1 и будут описано более подробно ниже.
В стенке 110 корпуса 101 расположен соединитель 140, проходящий через стенку 110 и формирующий несколько проходных соединителей для электрических сигналов между внутренней и внешней сторонами корпуса 101. Внутри корпуса 101 многовыводные кабели 151, 152 и 153 ведут от преобразователя к соединителю 140. Вместо одного соединителя, формирующего несколько проходных соединителей, может использоваться любой другой тип проходного соединителя, при этом проходные соединители могут быть разнесены друг от друга на значительные расстояния. В частности, отдельные группы проходных соединителей могут быть предусмотрены для преобразователей, связанных с каждым активным магнитным подшипником. Вместо штекерного соединителя может использоваться любой другой тип соединительной конструкции, например, клеммы для приема концов кабеля с помощью зажима или винтового соединения.
Снаружи корпуса 101 машины 100 расположены соединительная коробка 201, образующая корпус для конструкции 200 трансформатора, который будет описан более подробно ниже, и шкаф 301, образующий корпус для схемы 300 обработки сигналов, которая также будет описана более подробно ниже. Многовыводные кабели 203 ведут от соединителя 140 к соединителю 204 на соединительной коробке 201. Эти кабели являются относительно короткими. Еще один соединитель 202 расположен на соединительной коробке 201 для подключения штекера 401 многовыводного кабеля 400 или штекеров нескольких отдельных кабелей, идущих от коробки 201 к шкафу 301. Шкаф 301 может быть расположен в нескольких метрах (например, до 300 м) от корпуса 101 и соединительной коробки 201, и при этом кабель(и) 400 будет, следовательно, как правило, намного длиннее, чем кабели 151-153 и 203.
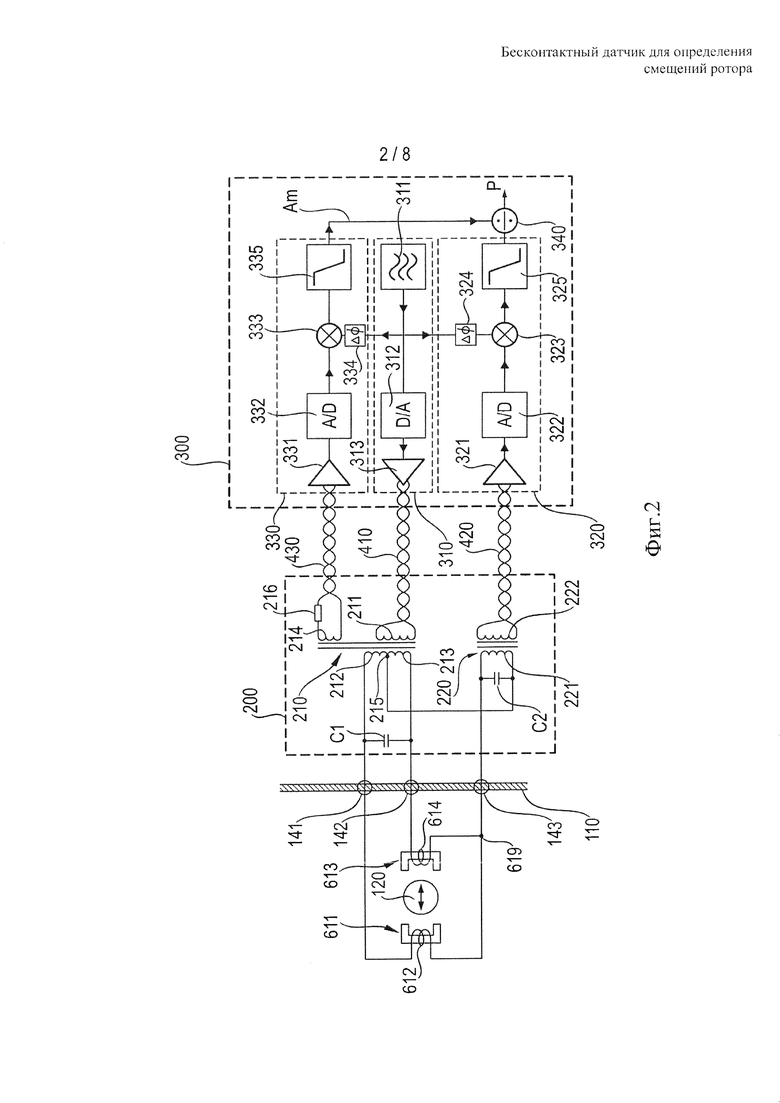
На Фиг. 2 показан, в виде монтажной схемы, первый вариант выполнения датчика радиальных смещений ротационной машины 100. Датчик, показанный на Фиг. 2, имеет один канал, то есть он выполнен с возможностью определения смещений ротора 120 вдоль одного направления.
Два идентичных преобразователя 611, 613 установлены внутри корпуса 101 машины на противоположных сторонах вала 120 ротора, чтобы взаимодействовать с радиально противоположными частями периферийной поверхности вала 120 ротора. Каждый преобразователь содержит U-образный сердечник, на который намотана измерительная катушки 612, 614. Преобразователи предпочтительно не являются герметичными, т.е. измерительные катушки непосредственно подвергаются воздействию условий окружающей среды внутри корпуса машины, таких как, например, температура, давление и влажность.
В соединительной коробке 201 расположено трансформаторное устройство 200, содержащее входной трансформатор 210 и выходной трансформатор 220, которые отделены от преобразователей стенкой 110 корпуса. Входной трансформатор 210 имеет первичную обмотку 211, две одинаковых вторичных обмотки 212 и 213, соединенные последовательно в общей точке 215 соединения (другими словами, вторичная обмотка с отводом от среднего вывода), и вспомогательную обмотку 214. Выходной трансформатор 220 имеет первичную обмотку 221 и вторичную обмотку 222.
Трансформаторное устройство 200 соединено со схемой 300 обработки сигналов с помощью кабелей 410, 420, 430. Кабели могут быть любого типа, который подходит для проведения высокочастотного переменного тока, например, "витая пара" или коаксиальный кабель. Схема 300 обработки сигналов содержит генератор 310 сигналов, первую схему 320 детектирования, вспомогательную схему 330 детектирования, и делитель 340.
Генератор 310 сигналов содержит цифровой генератор 311, который генерирует двоичный несущий сигнал. Этот несущий сигнал подается на цифро-аналоговый преобразователь (Ц/А) 312, за которым следует выходной усилитель 313. Кабель 410 ведет от выхода выходного усилителя 313 к первичной обмотке 211 входного усилителя 210, чтобы обеспечить усиленный несущий сигнал в качестве сигнала возбуждения переменного тока в первичной обмотке 211 входного трансформатора 210. Выходной импеданс выходного усилителя 313 согласован с характеристическим импедансом (волновым сопротивлением) кабеля 410, например, 50 Ом. Для датчика вихревых токов частота несущего сигнала имеет значение, предпочтительно, в диапазоне от 100 кГц до 10 МГц. Для индуктивного датчика частота предпочтительно составляет от 1 кГц до 100 кГц. Вихретоковые эффекты и индуктивные эффекты могут одновременно вносить свой вклад в сигнал датчика.
Первая схема 320 детектирования содержит входной усилитель 321, чей вход соединен со вторичной обмоткой 222 выходного трансформатора 220 посредством кабеля 420. Входной импеданс входного усилителя 321 согласован с характеристическим импедансом кабеля 420. За входным усилителем 321 следует аналого-цифровой преобразователь (А/Ц) 322. Двоичный выход А/Ц преобразователя 322 подается на цифровой умножитель 323, который принимает, на своем другом входе, двоичный несущий сигнал из генератора 311, с повернутой фазой с помощью цифрового фазовращателя 324. Сигнал, полученный как произведение двоичных сигналов, пропускают через цифровой фильтр 325 нижних частот.
Вспомогательная схема 330 детектирования создается очень похожим образом, как и первая схема 320. Она содержит входной усилитель 331, соединенный со вспомогательной обмоткой 214 входного трансформатора 210 с помощью кабеля 430. Входной импеданс входного усилителя 331 согласован с характеристическим импедансом кабеля 430. Для согласования (предпочтительно, очень низкого) импеданса источника вспомогательной обмотки с характеристическим импедансом кабеля 430, может быть расположен омический резистор 216, включенный последовательно со вспомогательной обмоткой 214. В дополнение к этому, или в качестве альтернативы, могут использоваться и другие элементы согласования импеданса, такие как конденсаторы. В качестве численного примера, если для вспомогательной схемы детектирования используется 1% мощности возбуждения, отношение витков между первичной обмоткой 211 и вспомогательной обмоткой 214 будет приблизительно 10:1. Если характеристический импеданс кабеля 410, 430 составляет 50 Ом, и если входной импеданс первичной обмотки 211 согласован с этим характеристическим импедансом, то выходной импеданс вспомогательной обмотки составит всего около 0,5 Ом. Для того, чтобы согласовать такой импеданс с характеристическим импедансом кабеля 430, между вспомогательной обмоткой 214 и кабелем 430 может быть вставлен резистор 216 сопротивлением 49,5 Ом.
За входным усилителем 331 следует А/Ц преобразователь 332, смеситель 333, который также принимает несущий сигнал от генератора 311 через фазовращатель 334 и фильтр нижних частот 335, чтобы получить опорный сигнал Am.
Делитель 340 принимает выходной сигнал первой схемы 320 детектирования и делит этот сигнал на опорный сигнал Am, чтобы получить сигнал P положения.
Преобразователи 611, 613 с измерительными катушками 612, 614 внутри корпуса машины и трансформаторное устройство 200 снаружи корпуса машины соединены следующим образом. Один конец каждой измерительной катушки 612, 614 соединен с общей точкой 619 соединения (точка, общая для обеих катушек) внутри корпуса машины 100. Другой ("свободный") конец первой измерительной катушки 612 соединен со "свободным" концом первой вторичной обмотки 212 входного трансформатора 210 через проходной соединитель 141, ведущий через стенку 110 корпуса. Кроме того, "свободный" конец второй измерительной катушки 614 соединен со "свободным" концом второй вторичной обмотки 213 входного трансформатора 210 через проходной соединитель 142. Общая точка 619 соединения между измерительными катушками 612, 614 соединена с одним концом первичной обмотки 221 выходного трансформатора 220 через проходной соединитель 143. Другой конец первичной обмотки 221 соединен снаружи корпуса машины с общей точкой 215 соединения между вторичными обмотками 212, 213 входного трансформатора 210. Таким образом формируется мостовая схема с четырьмя плечами. Два плеча этой мостовой схемы образованы последовательно соединенными измерительными катушками 612, 614, а остальные два плеча образованы последовательно соединенными вторичными обмотками 212, 213 входного трансформатора 210. Средние выводы между этими плечами (т.е. общие точки 619, 215 соединения) соединены первичной обмоткой 221 выходного трансформатора 220.
При работе генератор 310 сигнала возбуждает переменный ток в первичной обмотке 211 входного трансформатора 210. Это создает наведенные напряжения одинаковой амплитуды и фазы во вторичных обмотках 212, 213. Сумма этих напряжений дает ток через последовательно соединенные измерительные катушки 612, 614. Если ротор 120 находится точно в центре между преобразователями 611, 613, эти токи будут наводить напряжения одинаковой амплитуды, индуцированные в измерительных катушках 612, 613 - мостовая схема сбалансирована и никакого тока не будет протекать через первичную обмотку 221 выходного трансформатора 220. Если, однако, ротор 120 смещается в сторону одного из преобразователей 611, 613, то вихревые токи или индуктивные эффекты приведут к тому, что мост станет несбалансированным. Вследствие этого, ток будет протекать через первичную обмотку 221 выходного трансформатора 220, причем фаза и амплитуда этого тока будет зависеть от направления и величины смещения ротора 120. Этот ток будет создавать напряжение, индуцируемое во вторичной обмотке 222 выходного трансформатора 220, напряжение которого демодулируется первой схемой 320 детектирования.
В то же время, во вспомогательной обмотке 214 индуцируется напряжение, которое пропорционально амплитуде потока в сердечнике входного трансформатора 210, или, что эквивалентно, амплитуде тока возбуждения, протекающего через первичную обмотку 211 (пренебрегая эффектами насыщения и гистерезиса). Это напряжение демодулируются вспомогательной схемой 330 детектирования для получения уже обсуждавшегося ранее опорного сигнала Am. Путем деления выхода первой схемы 320 детектирования на этот опорный сигнал, результирующий сигнал P положения становится в значительной степени не зависящим от амплитуды тока возбуждения и, следовательно, в значительной степени не зависящим от каких-либо потерь в кабеле 410, предполагая, что потери в кабеле 420 и 430 идентичны.
Коэффициент трансформации входного трансформатора 210 выбирают таким образом, чтобы входной импеданс на его первичной обмотке 211 (то есть импеданс мостовой схемы, как преобразован трансформатором 210) был согласован с характеристическим импедансом кабеля 410. Точно так же, коэффициент трансформации выходного трансформатора 220 выбирают таким образом, чтобы выходной импеданс на его вторичной обмотке 222 был согласован с характеристическим импедансом кабеля 420. Таким образом, потери и отражения на границе раздела между кабелями и трансформаторами сведены к минимуму. Для более точного согласования входного и выходного импеданса с импедансом кабеля и для компенсации влияния реактивного сопротивления, параллельно вторичным обмоткам 212, 213 входного трансформатора 210 подключают конденсатор С1, и параллельно первичной обмотке 221 выходного трансформатора 221 подключают конденсатор С2. В частности, эти конденсаторы могут использоваться для корректировки реактивного сопротивления на входе и выходе в ноль. Согласование импеданса с импедансом кабелей делает систему практически не зависящей от длины кабеля. Только фаза демодуляции с помощью фазовращателей 324 и 334 должна быть скорректирована в зависимости от длины кабеля. Можно, конечно, предусмотреть дополнительные элементы согласования импеданса и/или расположить элементы согласования импеданса в других местах, например, конденсаторы могут быть расположены параллельно с измерительными катушками или параллельно с первичной обмоткой 211 входного трансформатора 210 и со вторичной обмоткой 222 выходного трансформатора 220.
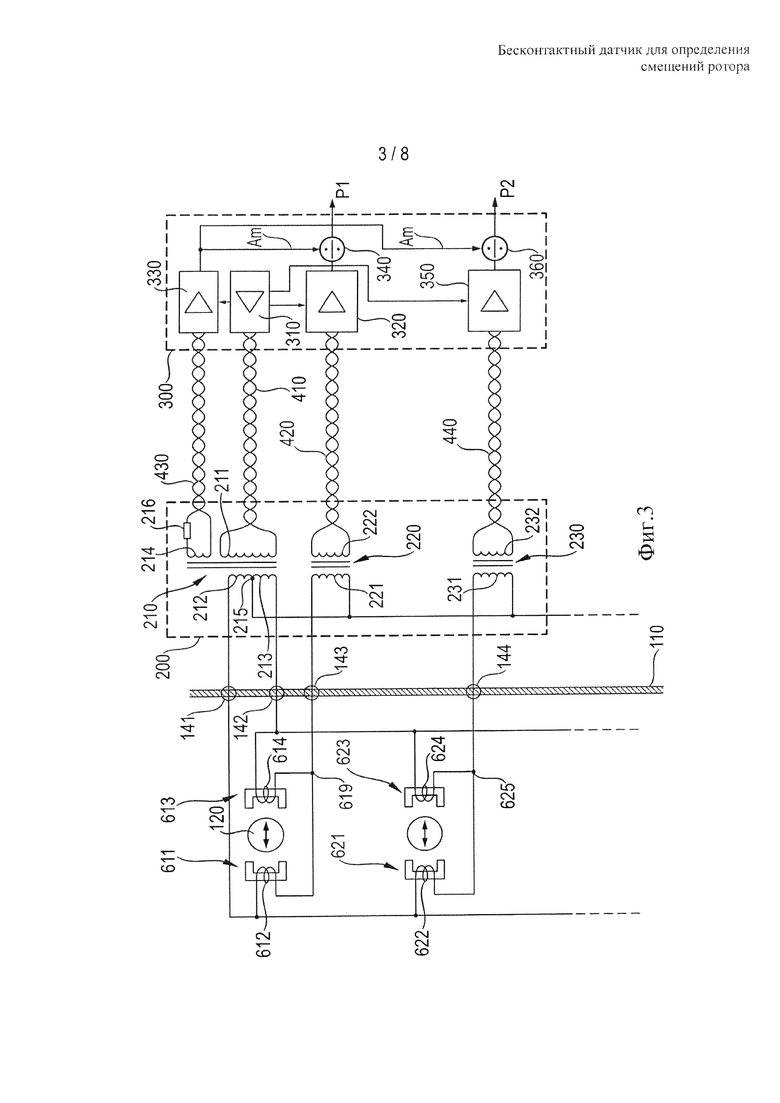
На Фиг. 3 показано, как к сенсорному устройству, изображенному на Фиг. 2, могут быть добавлены один или несколько дополнительных измерительных каналов. Часть схемы, которая показана в верхней части Фиг. 3, полностью соответствует схеме, изображенной на Фиг. 2, при этом элементы, имеющие такую же функциональность, что и на Фиг. 2, обозначены теми же самыми номерами позиций. Генератор 310 сигналов, первая схема 330 детектирования и вспомогательная схема 320 детектирования приведены только в виде четырехугольников. Для согласования импеданса снова могут использоваться конденсаторы, которые не показаны для простоты.
Схема, приведенная на Фиг. 3, дополнительно содержит дополнительную пару идентичных преобразователей 621, 623 с третьей и четвертой измерительными катушками 622, 624 внутри корпуса машины, второй выходной трансформатор 230 с первичной обмоткой 231 и вторичной обмоткой 232 снаружи корпуса машины, вторую схему 350 детектирования, которая идентична первой схеме 320 детектирования, и второй делитель 360.
Третья и четвертая измерительные катушки 622, 624 соединены с первой и второй измерительными катушками 612, 614 и с трансформаторами 210, 220 и 230 следующим образом. Один конец каждой измерительной катушки 622, 624 снова соединен внутри корпуса машины с общей точкой 625 соединения между этими катушками. Другой ("свободный") конец третьей измерительной катушки 622 соединен внутри корпуса машины со "свободным" концом первой измерительной катушки 612. Аналогичным образом, "свободный" конец четвертой измерительной катушки 624 соединен внутри корпуса машины со "свободным" концом второй измерительной катушки 614. Общая точка 625 соединения между третьей и четвертой измерительными катушками 622, 624 соединена с одним концом первичной обмотки 231 второго выходного трансформатора 230 через проходной соединитель 144. Другой конец первичной обмотки 231 соединен снаружи корпуса машины с общей точкой 215 соединения между вторичными обмотками 212, 213 входного трансформатора 210. Таким образом, к уже имеющейся мостовой схеме добавляются два дополнительных плеча, образованные третьей и четвертой измерительными катушками 622, 624. Средний вывод между этими плечами соединен со средней точкой между вторичными обмотками 212, 213 входного трансформатора 210 через первичную обмотку 231 второго выходного трансформатора 230.
Режим работы для третьей и четвертой измерительных катушек 622, 624 такой же, что и для первой и второй измерительных катушек 612, 614. В результате получают два независимых измерительных канала, обеспечивающих сигналы Р1 и Р2 положения.
Сенсорное устройство легко может быть дополнительно расширено до большего количества измерительных каналов точно таким же образом.
На Фиг. 4 показан второй вариант выполнения датчика радиальных смещений, в котором функции входного и выходного трансформаторов взаимозаменены, по сравнению с вариантом выполнения, изображенным на Фиг. 2. Элементы, имеющие такую же функциональность как и показанные на Фиг. 2 и 3, обозначены одними и теми же номерами позиций.
Опять же, преобразователи 611, 613, 621 и 623 с измерительными катушками 612, 614, 622 и 624 расположены внутри корпуса машины. Эти преобразователи снаружи корпуса машины соединены с трансформаторным устройством 200, содержащим входной трансформатор 240 и выходные трансформаторы 250, 260. Трансформаторное устройство 200 взаимодействует со схемой 300 обработки сигналов, как описано выше, посредством кабелей 410-440.
В отличие от варианта выполнения, показанного на Фиг. 2 и 3, входной трансформатор 240 имеет только одну вторичную обмотку 242, тогда как каждый из выходных трансформаторов 250, 260 имеет две первичные обмотки, соответственно, 251, 252 и 261, 262, соединенные последовательно в общих точках соединения, соответственно, 254, 264 (т.е. каждый выходной трансформатор имеет первичную обмотку со средним выводом).
Измерительные катушки 612, 614, 622 и 624 подсоединены к трансформаторам 240, 250 и 260 следующим образом. Все четыре измерительные катушки соединены внутри корпуса машины с общей точкой 619 соединения, которая соединена с одним концом вторичной обмотки 242 входного трансформатора 240 посредством проходного соединителя 141 через стенку 110. Общие точки 254, 264 соединения между первичными обмотками 251, 252, 261 и 262 выходных трансформаторов 250 и 260 соединены снаружи корпуса машины с формированием одной общей точки соединения. Другой конец вторичной обмотки 242 соединен снаружи корпуса машины с этой общей точкой соединения. Каждый из остальных, "свободных" концов измерительных катушек 612, 614, 622 и 624 соединен с одним из оставшихся "свободных" концов первичных обмоток 251, 252, 261 и 262 выходных трансформаторов 250, 260 посредством проходных соединителей 142, 143, 144 и 145. Таким образом, образуются две мостовые схемы, каждая с четырьмя плечами. Первая мостовая схема содержит, в качестве первых двух плеч, последовательно соединенные измерительные катушки 612 и 614, а в качестве ее третьего и четвертого плеч, последовательно соединенные первичные обмотки 251 и 252 первого выходного трансформатора 250. Вторая мостовая схема содержит, в качестве первых двух плеч, последовательно соединенные измерительные катушки 622 и 624, а в качестве ее третьего и четвертого плеч, последовательно соединенные первичные обмотки 261 и 262 второго выходного трансформатора 260. Эти мостовые схемы имеют общую вторичную обмотку 242 входного трансформатора 240, который соединяет общие точки соединения между измерительными катушками и первичными обмотками выходных трансформаторов.
В процессе работы входной трансформатор 240 возбуждается генератором 310 сигналов, в результате чего в обеих мостовых схемах протекает ток. Каждый из выходных трансформаторов 250, 260 обеспечивает разностный сигнал, который отражает разницу между импедансами в каждой паре преобразователей, соответственно, 611, 613 и 621, 623.
Как и в варианте выполнения, показанном на Фиг. 2-3, последовательно с согласующим импеданс резистором 245 расположена вспомогательная обмотка 244, соединенная со вспомогательной схемой 330 детектирования через кабель 430.
Как в варианте выполнения, показанном на Фиг. 2-3, так и в варианте выполнения, показанном на Фиг. 4, все изображенные преобразователи измеряют радиальное положение вала 120 ротора. Другими словами, оба измерительных канала показаны используемыми для определения радиальных смещений. В частности, оба измерительных канала могут использоваться для измерения смещений одной и той же части ротора вдоль разных направлений. В другом применении, указанные два измерительных канала могут использоваться для измерения смещений различных частей ротора в одном и том же или в разных направлениях.
Тем не менее, также возможно использовать измерительный канал для определения аксиальных, а не радиальных смещений ротора. Пример показан на Фиг. 5. В этом примере одна из измерительных катушек второго измерительного канала (в данном случае, третья измерительная катушка 622) расположена вблизи аксиальной торцевой поверхности 124 ротора 120, а другая измерительная катушка этого канала (здесь, четвертая измерительная катушка 624) расположена в непосредственной близости от неподвижной эталонной мишени 601. Вместо размещения третьей измерительной катушки вблизи аксиальной торцевой поверхности ротора, также можно разместить эту катушку вблизи любой другой поверхности ротора, которая перпендикулярна оси А вращения, например, в непосредственной близости от аксиальной поверхности упорного диска, размещенного на роторе. Также, конечно, вместо использования эталонной мишени, можно расположить четвертую измерительную катушку вблизи направленной в противоположном направлении аксиальной поверхности ротора.
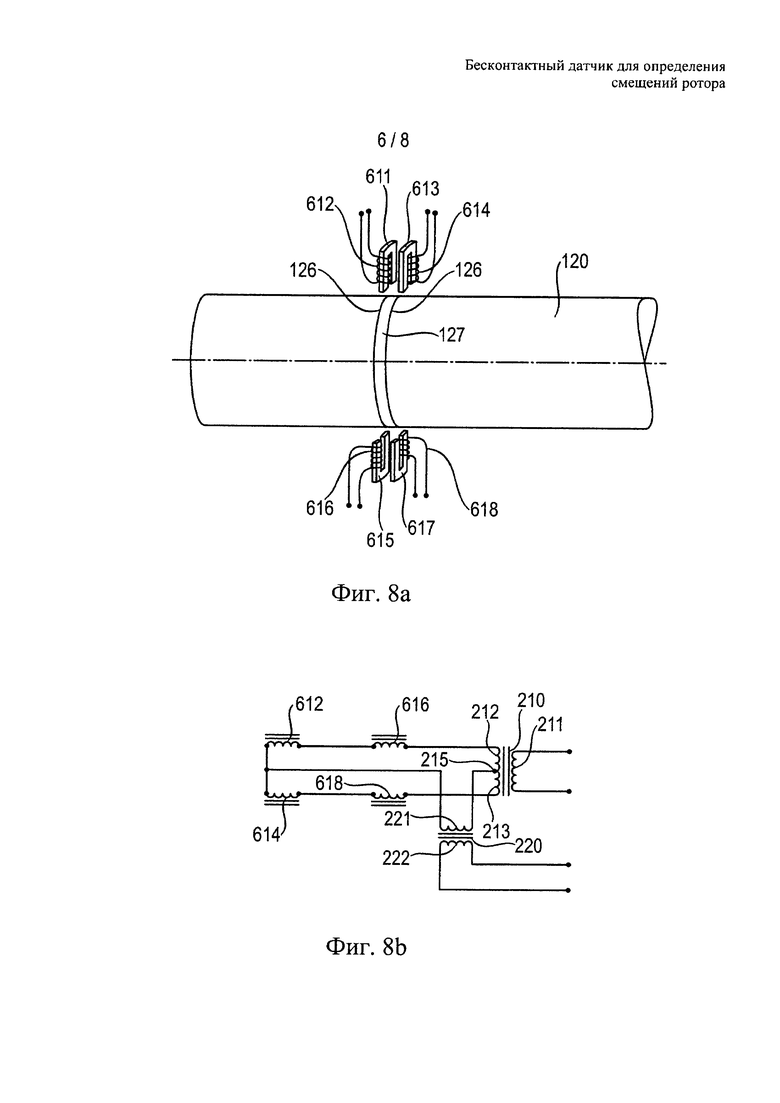
Другой пример того, как можно определить аксиальные смещения, показан на Фиг. 8. Вместо того, чтобы использовать поверхность, перпендикулярную оси вращения, используется периферийная кромка 126, расположенная на внешней окружности ротора 120. Эта кромка 126 может представлять собой кромку окружной канавки, кромку между различными материалами (с различными магнитными восприимчивостями или электрическими проводимостями), или кромку, которая отделяет две любые аксиальные части, которые отличаются в некотором другом отношении. В настоящем примере имеются две таких кромки 126, причем кольцевая мишень 127 выполнена из другого материала, чем остальная часть ротора между ними. Первый и второй преобразователи 611 и 613 с первой и второй измерительными катушками 612 и 614 расположены вблизи кромок 126. Эти катушки могут, в принципе, быть подсоединены, как показано на Фиг. 2. Тем не менее, этот тип конструкции обеспечивает нежелательную чувствительность к радиальным смещениям ротора. Это компенсируется путем добавления дополнительных преобразователей 615, 617 с дополнительными измерительными катушками 616, 618, которые расположены в радиально противоположных местах относительно первого и второго преобразователей. Первая измерительная катушка 612 соединена последовательно с радиально противоположной первой дополнительной измерительной катушкой 616, а вторая измерительная катушка 614 соединена последовательно с радиально противоположной второй дополнительной измерительной катушкой 618. Таким образом, первое плечо мостовой схемы содержит первую измерительную катушку и первую дополнительную измерительную катушку, а второе плечо содержит вторую измерительную катушку и вторую дополнительную измерительную катушку. Остальная часть моста соединена так, как показано на Фиг. 2. Сигнал зависит от аксиального смещения ротора и по существу не зависит от радиального смещения ротора.
В еще одном применении измерительный канал может использоваться для определения частоты и направления вращения ротора, то есть измерительный канал может выступать в качестве импульсного датчика. Пример показан на Фиг. 6. На нем показано, что третья и четвертая измерительные катушки расположены вблизи ротора в различных окружных положениях, отделенных друг от друга менее чем на 180° вокруг оси А вращения (на Фиг. 6: отстоят друг от друга на 90°), а ротор 120 имеет выемку 125. Во время вращения импеданс измерительных катушек 622 и 624 изменяется, когда выемка 125 проходит мимо соответствующей измерительной катушки. Из последовательности этих изменений можно определить как частоту, так и направление вращения. Вместо выемки может использоваться любая другая структура, которая делает часть ротора, ближайшую к третьей и четвертой измерительным катушкам, вращательно асимметричной.
Другой пример импульсного датчика такого типа изображен на Фиг. 7. Вместо того, чтобы выполнять измерительные катушки 622, 624 на отдельных сердечниках, формируя два отдельных преобразователя 621 и 623, теперь обе измерительных катушки размещены на общем сердечнике 626 Е-типа, формируя единый импульсный преобразователь.
На Фиг. 9 показано, что выходные трансформаторы не являются строго необходимыми. Выходные сигналы передаются непосредственно от выводов к схемам 320, 350 детектирования через коаксиальные кабели 421, 441. Коаксиальный кабель 411 также используется для соединения входного трансформатора 210 с генератором 310 сигналов. Средний вывод между вторичными обмотками входного трансформатора 210 (в более общем плане, общая точка соединения между третьим и четвертым плечами мостовой схемы) соединена с землей, также как и внешние проводники коаксиальных кабелей 421, 441. Согласование импеданса на входном конце кабелей 421, 441 осуществляется путем соответствующего выбора индуктивностей преобразователей 611, 613, 621, 623 и конденсаторов С2, СЗ, соединенных между центральным проводником каждого кабеля и землей. Согласование импеданса на выходном конце кабеля 421, 441 достигается путем соответствующего выбора входных импедансов схем 320, 350 детектирования.
На Фиг. 10 показан вариант выполнения, в котором входной трансформатор пространственно удален от проходных соединителей 141, 142, которые ведут к преобразователям внутри машины. Коаксиальные кабели 412, 413 используются в качестве передающих кабелей для соединения входного трансформатора с проходными соединителями. Внешние проводники коаксиальных кабелей 412, 413 с обоих концов соединены с землей. Кроме того, средний вывод между вторичными обмотками входного трансформатора 210 (в более общем плане, общая точка соединения между третьим и четвертым плечам мостовой схемы) соединена с землей. На дальнем конце кабелей (т.е. на конце, удаленном от входного трансформатора) между внутренними проводниками коаксиальных кабелей подсоединен конденсатор С11, а между каждым внутренним проводником и землей подсоединены конденсаторы С12, С13, чтобы добиться согласования импеданса. На входной стороне кабелей, согласование импеданса достигается за счет соответствующего выбора выходного импеданса генератора 310 сигнала и коэффициента трансформации входного трансформатора 210 таким образом, что преобразованный выходной импеданс генератора 310 сигнала соответствует характеристическому импедансу кабелей 412, 413.
Возможны многие модификации без отхода от сущности и объема настоящего изобретения. В частности, схема обработки сигнала может быть выполнена по-другому. Для части или для всех функциональных возможностей схемы обработки сигналов может использоваться аналоговая, а не цифровая электроника. В схемах 320, 330 и/или 350 детектирования может использоваться квадратурный демодулятор, которое устраняет необходимость использования фазовращателей 323 и/или 334. В этом случае выходные сигналы демодулятора имеют комплексные значения. Делитель 340 компенсирует фазовый сдвиг из-за длины кабеля, так как фазовый сдвиг одинаков для обоих входных сигналов.
Вместо деления выходного сигнала схем 320, 350 детектирования на опорный сигнал Am, можно подавать опорный сигнал Am к генератору 310 сигналов таким образом, чтобы обеспечить заданную амплитуду тока в первичной обмотке входного трансформатора. Согласование импеданса может быть выполнено другими способами, чем показано, например, с использованием дополнительных конденсаторов и/или дополнительных индуктивностей. Вместо того, чтобы быть размещенными в одной общей соединительной коробке 201, трансформаторы могут быть размещены в отдельных корпусах. Вместо использования одного соединителя для выполнения проходных соединителей через стенку 110 корпуса, для выполнения проходных соединителей также можно предусмотреть несколько соединителей, или же выполнить проходные соединители каким-либо другим известным способом, например, путем пропускания кабеля через (в остальных случаях герметичное) отверстие в стенке 110. Также возможны и многие другие модификации.
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ
100 роторная машина
101 корпус
110 стенка корпуса
120 ротор
121, 122 часть вала
123 упорный диск
124 торцевая поверхность
125 выемка
126 кромка
127 кольцо
131, 132 активный радиальный подшипник
133 активный аксиальный подшипник
140 соединитель
141-145 проходной соединитель
151-153 многовыводной кабель
200 трансформаторное устройство
201 соединительная коробка
202, 204 соединитель
203 многовыводной кабель
210 входной трансформатор
211 первичная обмотка
212, 213 вторичная обмотка
214 вспомогательная обмотка
215 общая точка соединения (средний вывод)
216 последовательный резистор
220 выходной трансформатор
221 первичная обмотка
222 вторичная обмотка
230 выходной трансформатор
231 первичная обмотка
232 вторичная обмотка
240 входной трансформатор
241 первичная обмотка
242 вторичная обмотка
244 вспомогательная обмотка
245 последовательный резистор
250 выходной трансформатор
251, 252 первичная обмотка
253 вторичная обмотка
254 общая точка соединения (средний вывод)
260 выходной трансформатор
261, 262 первичная обмотка
263 вторичная обмотка
264 общая точка соединения (средний вывод)
300 схема обработки сигналов
301 шкаф
310 генератор сигналов
311 генератор
312 Ц/А преобразователь
313 выходной усилитель
320 первая схема детектирования
321 входной усилитель
322 А/Ц преобразователь
323 смеситель
324 фазовращатель
325 фильтр нижних частот
330 вспомогательная цепь детектирования
331 входной усилитель
332 А/Ц преобразователь
333 смеситель
334 фазовращатель
335 фильтр нижних частот
340 делитель
350 вторая схема детектирования
360 делитель
400 многовыводной кабель
401 штекер
410, 420, 430, 440 многовыводной кабель
411, 412, 413 коаксиальный кабель
421, 441 коаксиальный кабель
601 эталонная мишень
611 первый преобразователь
612 первая измерительная катушка
613 второй преобразователь
614 вторая измерительная катушка
615 дополнительный преобразователь
616 дополнительная измерительная катушка
617 дополнительный преобразователь
618 дополнительная измерительная катушка
619 общая точка соединения
621 третий преобразователь
622 третья измерительная катушка
623 четвертый преобразователь
624 четвертая измерительная катушка
625 общая точка соединения
А ось вращения
Am опорный сигнал
Р, Р1, Р2 сигнал положения
С1, С2, С3 конденсатор
С11, С12, С13 конденсатор
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктивный датчик микроперемещений ротора активного магнитного подвеса | 2024 |
|
RU2834196C1 |
| УСТРОЙСТВО ДЛЯ ВЫСОКОЧАСТОТНОЙ ПЕРЕДАЧИ СЕТЕВЫХ ДАННЫХ ПО ЛИНИЯМ | 2001 |
|
RU2254681C2 |
| Устройство для дистанционного измерения параметра диэлектрика | 1977 |
|
SU682811A1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2081398C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТОКА ВОЗБУЖДЕНИЯ В БЕСЩЕТОЧНЫХ ЭЛЕКТРИЧЕСКИХ МАШИНАХ | 2008 |
|
RU2453981C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ПЕРЕДАЧИ ЭЛЕКТРОЭНЕРГИИ НА ПОДВОДНЫЙ ОБЪЕКТ (ВАРИАНТЫ) | 2012 |
|
RU2502170C1 |
| ТРЕХФАЗНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ПРОДОЛЬНОЙ ДИФФЕРЕНЦИАЛЬНОЙ ТОКОВОЙ ЗАЩИТЫ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2014 |
|
RU2544012C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ПРЕОБРАЗОВАТЕЛЯ НАПРЯЖЕНИЯ | 2022 |
|
RU2827768C2 |
| Устройство защиты радиоприема в условиях сложной электромагнитной обстановки корабля, судна | 2019 |
|
RU2723434C1 |
| СВЕРХВЫСОКОЭФФЕКТИВНЫЙ ПЕРЕКЛЮЧАЮЩИЙ ИНВЕРТОР МОЩНОСТИ И УСИЛИТЕЛЬ МОЩНОСТИ | 2011 |
|
RU2558945C2 |



Изобретение относится к измерительной технике и предназначено для измерения характеристик ротора, в частности смещений ротора. Сущность: две измерительные катушки (612, 614) взаимодействуют с поверхностями ротора. Мостовая схема сформирована измерительными катушками и двумя вторичными обмотками (212, 213) входного трансформатора (210). Первичная обмотка входного трансформатора принимает возбуждающий сигнал. Выходной сигнал получают на выводе, образованном общей точкой соединения между измерительными катушками (612, 614) и общей точкой соединения между вторичными обмотками входного трансформатора. Таким образом, схемы возбуждения и детектирования разделены. Если для соединения мостовой схемы со схемой обработки сигналов используются кабели, то входные и выходные импедансы мостовой схемы согласованы с характеристическим импедансом кабеля. Выходной трансформатор может быть подсоединен к выводу. Функции входных и выходных трансформаторов могут быть взаимозаменяемыми. Технический результат: простота, возможность использования с длинными кабелями. 3 н. и 19 з.п. ф-лы, 10 ил.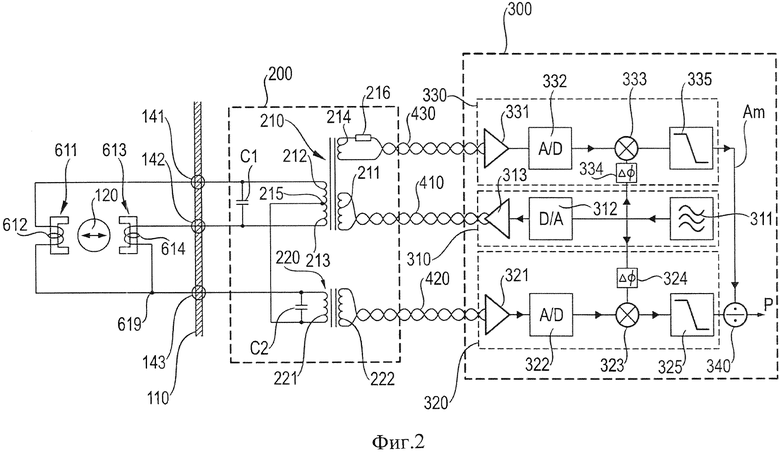
1. Сенсорное устройство для определения характеристик ротора (120), содержащее:
первую и вторую измерительные катушки (612, 614), каждая из которых (612, 614) выполнена с возможностью взаимодействия с поверхностью ротора (120) для детектирования смещений ротора (120) относительно первой и второй измерительных катушек (612, 614), и
входной трансформатор (210), имеющий первичную обмотку (211) и по меньшей мере первую и вторую вторичные обмотки (212, 213), причем первичная обмотка (211) входного трансформатора (210) формирует вход для сигнала возбуждения,
при этом первая измерительная катушка (612), вторая измерительная катушка (614) и вторичные обмотки (212, 213) входного трансформатора (210) соединены с образованием мостовой схемы, причем мостовая схема содержит первое, второе, третье и четвертое плечи, при этом первое плечо содержит первую измерительную катушку (612), второе плечо содержит вторую измерительную катушку (614), первое плечо и второе плечо соединены последовательно, образуя общую точку соединения (619) между ними, третье плечо содержит первую вторичную обмотку (212) входного трансформатора (210), а четвертое плечо содержит вторую вторичную обмотку (213) входного трансформатора (210), и третье и четвертое плечи соединены последовательно с образованием общей точки (215) соединения между ними,
причем общая точка (619) соединения между первым плечом и вторым плечом мостовой схемы соединена с первым контактом первого вывода для первого выходного сигнала, и
общая точка (215) соединения между третьим плечом и четвертым плечом мостовой схемы соединена со вторым контактом первого вывода.
2. Сенсорное устройство по п. 1, дополнительно содержащее:
входной кабель (410; 411), соединенный с первичной обмоткой (211) входного трансформатора (210), причем входной кабель (410; 411) имеет первый характеристический импеданс, и
по меньшей мере один элемент (С1) согласования импеданса, соединенный по меньшей мере с одной из первичной обмотки (211), первой вторичной обмотки (212) и второй вторичной обмотки (213) входного трансформатора (210) с обеспечением согласования входного импеданса на первичной обмотке (211) входного трансформатора (210) с характеристическим импедансом входного кабеля (410, 411).
3. Сенсорное устройство по п. 1, дополнительно содержащее:
первый передающий кабель (412), имеющий первый конец и второй конец, причем первый конец соединен с третьим плечом мостовой схемы, а второй конец соединен с первым плечом мостовой схемы, при этом первый передающий кабель имеет первый характеристический импеданс,
второй передающий кабель (413), имеющий первый конец и второй конец, причем первый конец соединен с четвертым плечом мостовой схемы, а второй конец соединен со вторым плечом мостовой схемы, при этом второй передающий кабель имеет второй характеристический импеданс, и
один или несколько элементов (С11, С12, С13) согласования импеданса, соединенных со вторыми концами первого и второго передающих кабелей (412, 413) для согласования входных импедансов первого и второго плеч мостовой схемы с характеристическими импедансами первого и второго передающих кабелей (412, 413).
4. Сенсорное устройство по п. 1, дополнительно содержащее первый выходной трансформатор (220), который имеет первичную обмотку (221) и вторичную обмотку (222), при этом первичная обмотка (221) первого выходного трансформатора (220) соединена с первым и вторым контактами первого вывода.
5. Сенсорное устройство по п. 4, дополнительно содержащее:
выходной кабель (420), соединенный со вторичной обмоткой (222) первого выходного трансформатора (220), причем выходной кабель (420) имеет характеристический импеданс, и
по меньшей мере один элемент (С2) согласования импеданса, соединенный по меньшей мере с одной из первичной обмотки (221) и вторичной обмотки (222) выходного трансформатора (220) для согласования выходного импеданса на вторичной обмотке (222) выходного трансформатора (220) с характеристическим импедансом выходного кабеля (420).
6. Сенсорное устройство по п. 1, дополнительно содержащее:
выходной кабель (421), имеющий характеристический импеданс, причем выходной кабель (421) содержит первый и второй проводники, каждый из которых имеет первый конец и второй конец, причем первый конец первого проводника соединен с первым контактом первого вывода, а первый конец второго проводника соединен со вторым контактом первого вывода, и
один или несколько элементов (С2) согласования импеданса, соединенных с первым концом первого проводника и первым концом второго проводника для согласования выходного импеданса мостовой схемы на первом выводе с характеристическим импедансом выходного кабеля (421).
7. Сенсорное устройство по п. 1, содержащее первый, второй и третий проходные соединители (141, 142, 143) для установления электрического соединения через стенку (110), которая отделяет входной трансформатор (210) и первый вывод от первого и второго плеч мостовой схемы, причем
первый проходной соединитель (141) соединяет первое плечо мостовой схемы с третьим плечом мостовой схемы,
второй проходной соединитель (142) соединяет второе плечо мостовой схемы с четвертым плечом мостовой схемы, и
третий проходной соединитель (143) соединяет общую точку соединения (619) между первым плечом и вторым плечом мостовой схемы с первым контактом первого вывода.
8. Сенсорное устройство по любому из пп. 1-7, дополнительно содержащее третью и четвертую измерительные катушки (622, 624), причем мостовая схема содержит пятое и шестое плечи, соединенные последовательно, с формированием общей точки соединения (625) между ними, причем пятое плечо содержит третью измерительную катушку (622), а шестое плечо содержит четвертую измерительную катушку (624),
при этом общая точка (625) соединения между пятым плечом и шестым плечом мостовой схемы соединена с первым контактом второго вывода для второго выходного сигнала.
9. Сенсорное устройство по п. 8, содержащее первый, второй, третий и четвертый проходные соединители (141, 142, 143, 144) для установления электрического соединения через стенку, отделяющую входной трансформатор (200) и первый и второй выводы от первого, второго, пятого и шестого плеч мостовой схемы, причем
первый проходной соединитель (141) соединяет точку, общую для первого и пятого плеч мостовой схемы, с третьим плечом мостовой схемы,
второй проходной соединитель (142) соединяет точку, общую для второго и шестого плеч мостовой схемы, с четвертым плечом мостовой схемы,
третий проходной соединитель (143) соединяет общую точку соединения (619) между первым плечом и вторым плечом мостовой схемы с первым контактом первого вывода, и
четвертый проходной соединитель (144) соединяет общую точку соединения (625) пятого плеча и шестого плеча мостовой схемы с первым контактом второго вывода.
10. Сенсорное устройство для определения характеристик ротора (120), содержащее:
первую и вторую измерительные катушки (612, 614), каждая из которых выполнена с возможностью взаимодействия с поверхностью ротора (120) для определения смещений ротора (120) относительно первой и второй измерительных катушек (612, 614), и
входной трансформатор (240), имеющий первичную обмотку (241) и вторичную обмотку (242), причем первичная обмотка (241) входного трансформатора (240) формирует вход для сигнала возбуждения, и
первый выходной трансформатор (250), имеющий по меньшей мере первую и вторую первичные обмотки (251, 252) и вторичную обмотку (253), причем вторичная обмотка (253) формирует первый вывод для первого выходного сигнала,
причем первая измерительная катушка (612), вторая измерительная катушка (614) и первичные обмотки (251, 252) первого выходного трансформатора (250) соединены с образованием первой мостовой схемы,
при этом первая мостовая схема содержит первое, второе, третье и четвертое плечи, первое плечо содержит первую измерительную катушку (612), второе плечо содержит вторую измерительную катушку (614), первое плечо и второе плечо соединены последовательно с формированием общей точки (619) соединения между ними, третье плечо содержит первую первичную обмотку (251) первого выходного трансформатора (250), четвертое плечо содержит вторую первичную обмотку (252) первого выходного трансформатора (250), третье плечо и четвертое плечо соединены последовательно с образованием общей точки соединения (254) между ними,
при этом вторичная обмотка (242) входного трансформатора (240) подсоединена между общей точкой (619) соединения первого и второго плеч первой мостовой схемы и общей точкой (254) соединения третьего и четвертого плеч первой мостовой схемы.
11. Сенсорное устройство по п. 10, дополнительно содержащее:
входной кабель (410; 411), соединенный с первичной обмоткой (241) входного трансформатора (240), причем входной кабель (410; 411) имеет первый характеристический импеданс, и
по меньшей мере один элемент (С1) согласования импеданса, соединенный по меньшей мере с одной из первичной обмотки (241) и вторичной обмотки (242) входного трансформатора (240) для согласования входного импеданса на первичной обмотке (241) входного трансформатор (240) с характеристическим импедансом входного кабеля (410; 411).
12. Сенсорное устройство по п. 10, дополнительно содержащее:
выходной кабель (420), соединенный со вторичной обмоткой (253) первого выходного трансформатора (250), причем выходной кабель (420) имеет характеристический импеданс, и
по меньшей мере один элемент (С2) согласования импеданса, соединенный по меньшей мере с одной из первой первичной обмотки (251), второй первичной обмотки (252) и вторичной обмотки (253) первого выходного трансформатора (250) для согласования выходного импеданса на вторичной обмотке (253) первого выходного трансформатора (250) с характеристическим импедансом выходного кабеля (420).
13. Сенсорное устройство по п. 10, дополнительно содержащее первый, второй и третий проходные соединители (141, 142, 143) для установления электрического соединения через стенку (110), которая отделяет входной трансформатор (240) и первый выходной трансформатор (250) от первого и второго плеч первой мостовой схемы, причем
первый проходной соединитель (141) соединяет общую точку соединения (619) первого плеча и второго плеча первой мостовой схемы с одним концом вторичной обмотки (242) входного трансформатора (240),
второй проходной соединитель (142) соединяет первое плечо первой мостовой схемы с третьим плечом первой мостовой схемы, и
третий проходной соединитель (143) соединяет второе плечо первой мостовой схемы с четвертым плечом первой мостовой схемы.
14. Сенсорное устройство по п. 10, дополнительно содержащее:
третью и четвертую измерительные катушки (622, 624) и второй выходной трансформатор (260), имеющий по меньшей мере первую и вторую первичные обмотки (261, 262),
причем третья измерительная катушка (622), четвертая измерительная катушка (624) и первичные обмотки (261, 262) второго выходного трансформатора (250) соединены с образованием второй мостовой схемы,
при этом вторая мостовая схема содержит первое, второе, третье и четвертое плечи, первое плечо содержит третью измерительную катушку (622), второе плечо содержит четвертую измерительную катушку (624), первое плечо и второе плечо соединены последовательно с формированием общей точки (625) соединения между ними, третье плечо содержит первую первичную обмотку (261) второго выходного трансформатора (260), а четвертое плечо содержит вторую первичную обмотку (262) второго выходного трансформатора (260), третье плечо и четвертое плечо соединены последовательно с образованием общей точки соединения (264) между ними, и
общая точка (625) соединения первого и второго плеч второй мостовой схемы соединена с общей точкой (619) соединения первого и второго плеч первой мостовой схемы, а общая точка (264) соединения третьего и четвертого плеч второй мостовой схемы соединена с общей точкой (254) соединения третьего и четвертого плеч первой мостовой схемы.
15. Сенсорное устройство по п. 14, дополнительно содержащее первый, второй, третий, четвертый и пятый проходные соединители (141-145) для установления электрического соединения через стенку (110), которая отделяет трансформаторное устройство (220) от измерительных катушек (612, 614, 622, 624), причем
первый проходной соединитель (141) соединяет общую точку соединения (619) первого и второго плеч первой мостовой схемы и общую точку соединения (625) первого и второго плеч второй мостовой схемы с одним концом вторичной обмотки (242) входного трансформатора (240),
второй проходной соединитель (142) соединяет первое плечо первой мостовой схемы с третьим плечом первой мостовой схемы, и
третий проходной соединитель (143) соединяет второе плечо первой мостовой схемы с четвертым плечом первой мостовой схемы,
четвертый проходной соединитель (144) соединяет первое плечо второй мостовой схемы с третьим плечом второй мостовой схемы, и
пятый проходной соединитель (145) соединяет второе плечо второй мостовой схемы с четвертым плечом второй мостовой схемы.
16. Сенсорное устройство по любому из пп. 10-15, дополнительно содержащее схему (300) обработки сигналов, содержащую:
генератор (310) сигналов, функционально соединенный с первичной обмоткой (211; 241) входного трансформатора (210; 240) для возбуждения переменного тока в первичной обмотке (211; 241) входного трансформатора (210; 240), и
первую схему (320) детектирования, функционально соединенную с первым выводом, причем первая схема (320) детектирования выполнена с возможностью обработки первого выходного сигнала, полученного от первого вывода, для получения обработанного выходного сигнала (Р, Р1, Р2), который указывает на положение ротора (120) относительно первой и второй измерительных катушек (612, 614).
17. Сенсорное устройство по п. 16, в котором входной трансформатор (210; 240) содержит вспомогательную обмотку (214; 244), причем схема (300) обработки сигнала содержит вспомогательную схему (330) детектирования, функционально соединенную со вспомогательной обмоткой (214; 244) для получения опорного сигнала (Am), указывающего на амплитуду переменного тока в первичной обмотке (211; 241) входного трансформатора (210; 240).
18. Сенсорное устройство по п. 17, в котором схема (300) обработки сигнала содержит делитель (340) для деления выходного сигнала первой схемы (320) детектирования на опорный сигнал (Am).
19. Сенсорное устройство по п. 16, в котором схема (300) обработки сигнала выполнена удаленной от входного трансформатора (210; 240), причем между (i) схемой (300) обработки сигналов и (ii) входным трансформатором (210; 240) и первым выводом проходит по меньшей мере один кабель (400; 410, 420, 430, 440, 411, 421, 441).
20. Сенсорное устройство по п. 19, дополнительно содержащее соединительную коробку (201), которая вмещает по меньшей мере входной трансформатор (210; 240), при этом соединительная коробка (201) имеет по меньшей мере один соединитель (202) для разъемного присоединения кабеля (400, 410, 420, 430, 440) к соединительной коробке (201).
21. Сенсорное устройство по п. 19 или 20, в котором все входные и выходные импедансы, подсоединенные к кабелю (400; 410, 420, 430, 440), согласованы с характеристическим импедансом кабеля (400, 410, 420, 430, 440).
22. Устройство, содержащее корпус и ротор (120), подвешенный в корпусе с возможностью вращения вокруг оси (А) вращения, при этом устройство содержит сенсорное устройство по любому из пп. 1-21, причем по меньшей мере первое плечо и второе плечо первой мостовой схемы расположены внутри корпуса (110), а по меньшей мере входной трансформатор (210; 240) и первый вывод расположены снаружи корпуса, при этом корпус имеет стенку (110) с проходными соединителями (140; 141-145) для соединения первого и второго плеч первой мостовой схемы внутри корпуса с входным трансформатором (210; 240) и первым выводом снаружи корпуса.
| Устройство для измерения радиальных биений вала | 1979 |
|
SU781553A1 |
| Индуктивный датчик положения ротора | 1983 |
|
SU1107143A1 |
| JP 11295009, 29.10.1999 | |||
| US 2957126, 18.10.1960 | |||
| US 3491299, 20.01.1970. | |||

