Изобретение относится к измерительной технике и может быть использовано для измерения микроперемещений вращающихся деталей (роторов, валов и т.п.), в том числе в системах с активным магнитным подвесом.
Из уровня техники известен мостовой индуктивный датчик перемещения, содержащий два неподвижных ферромагнитных сердечника броневого типа с обмотками, подвижный якорь, расположенный в воздушном зазоре между ними и выполненный в виде ферромагнитного диска, с обеих сторон которого в кольцеобразных пазах размещены якорные обмотки, замкнутые на внешнюю регулировочную нагрузку, шток, жестко соединенный с якорем и объектом измерения, отличающийся тем, что он содержит дополнительно два ферромагнитных сердечника броневого типа с обмотками и подвижный якорь, расположенный в воздушном зазоре между ними и выполненный в виде ферромагнитного диска, с обеих сторон которого в кольцеобразных пазах размещены якорные обмотки, замкнутые на внешнюю регулировочную нагрузку, при этом дополнительный якорь жестко соединен со штоком, а обмотки всех сердечников соединены по мостовой схеме (см. Патент RU 2167398, опубликован 10.10.1998).
Недостатком данного датчика является то, что он может быть использован при измерении только линейных перемещений, а для измерения радиальных микроперемещений ротора его использовать невозможно.
Известен дифференциальный индуктивный датчик микроперемещений, содержащий источник синусоидального напряжения, два первичных преобразователя индуктивного типа, каждый из которых выполнен в виде катушки индуктивности с сердечником и якоря, установленного в зазоре между катушками с возможностью перемещения, и измерительный прибор, при этом датчик снабжен двумя вторичными преобразователями, каждый из которых выполнен в виде операционного усилителя с резистивной обратной связью по инвертирующему входу, двух входных резисторов и конденсатора, резисторы одним выводом подключены соответственно к прямому и инвертирующему входам операционного усилителя, вторые выводы резисторов объединены и соединены с выходом источника синусоидального напряжения, конденсатор подключен параллельно обмотке катушки индуктивности первичного преобразователя и соединен одним выводом с общим проводом, другим - с неинвертирующим входом операционной усилителя, а измерительный прибор выполнен в виде фазометра, входы которого соединены с выходами вторичных преобразователей (см. описание к авторскому свидетельству SU 1747869, опубликовано 15.07.1992).
Недостатком данного решения является достаточно сложная схема преобразования сигнала, включающая фазометр.
Наиболее близким к предложенному решению является сенсорное устройство для определения характеристик ротора, содержащее: первую и вторую измерительные катушки, каждая из которых выполнена с возможностью взаимодействия с поверхностью ротора для детектирования смещений ротора относительно первой и второй измерительных катушек, и входной трансформатор, имеющий первичную обмотку и по меньшей мере первую и вторую вторичные обмотки, причем первичная обмотка входного трансформатора формирует вход для сигнала возбуждения, при этом первая измерительная катушка, вторая измерительная катушка и вторичные обмотки входного трансформатора соединены с образованием мостовой схемы, причем мостовая схема содержит первое, второе, третье и четвертое плечи, при этом первое плечо содержит первую измерительную катушку, второе плечо содержит вторую измерительную катушку, первое плечо и второе плечо соединены последовательно, образуя общую точку соединения между ними, третье плечо содержит первую вторичную обмотку входного трансформатора, а четвертое плечо содержит вторую вторичную обмотку входного трансформатора, и третье и четвертое плечи соединены последовательно с образованием общей точки соединения между ними, причем общая точка соединения между первым плечом и вторым плечом мостовой схемы соединена с первым контактом первого вывода для первого выходного сигнала, и общая точка соединения между третьим плечом и четвертым плечом мостовой схемы соединена со вторым контактом первого вывода (см. Патент RU 2663247, опубликован 03.08.2018).
Недостатками наиболее близкого решения являются: наличие дополнительных элементов - входного трансформатора и элемента согласования импедансов, что усложняет конструкцию; при измерении осуществляется передача сигналов напряжения, а не тока, что делает устройство менее помехозащищенным.
Технической проблемой, решаемой предложенным изобретением, является повышение точности измерения микроперемещений вращающихся деталей (роторов, валов, якорей и т.п.), в том числе в системах с активным магнитным подвесом.
Техническим результатом изобретения является повышение помехоустойчивости и чувствительности индуктивного датчика перемещений, а также снижение влияния внешних факторов на показания датчика.
Технический результат изобретения достигается благодаря тому, что индуктивный датчик перемещений содержит по меньшей мере две пары сердечников с катушками индуктивности и расположенный между сердечниками ротор, по меньшей мере две пары сердечников расположены диаметрально противоположно в каждой паре, а обмотка катушки индуктивности каждого сердечника одной пары сердечников соединена с обмотками катушек индуктивности обоих сердечников другой диаметрально противоположной пары сердечников.
Кроме того, ротор может быть выполнен шихтованным.
Кроме того, сердечники в каждой паре сердечников могут быть соединены друг с другом шихтованным статором.
Кроме того, датчик может иметь более двух пар сердечников, при этом общее число сердечников кратно четырем.
Кроме того, первый сердечник по меньшей мере одной пары сердечников и первый сердечник по меньшей мере другой пары сердечников расположены диаметрально противоположно ротору, при этом второй сердечник по меньше мере одной пары сердечников и второй сердечник по меньшей мере другой пары сердечников расположены диаметрально противоположно ротору.
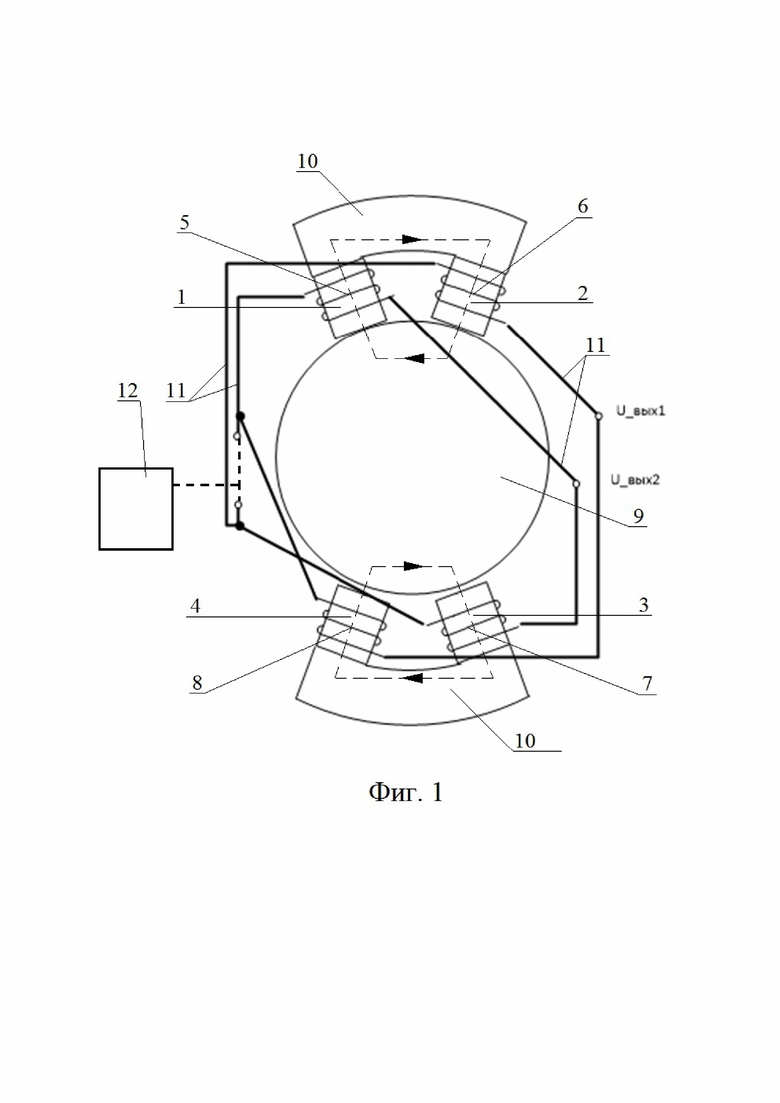
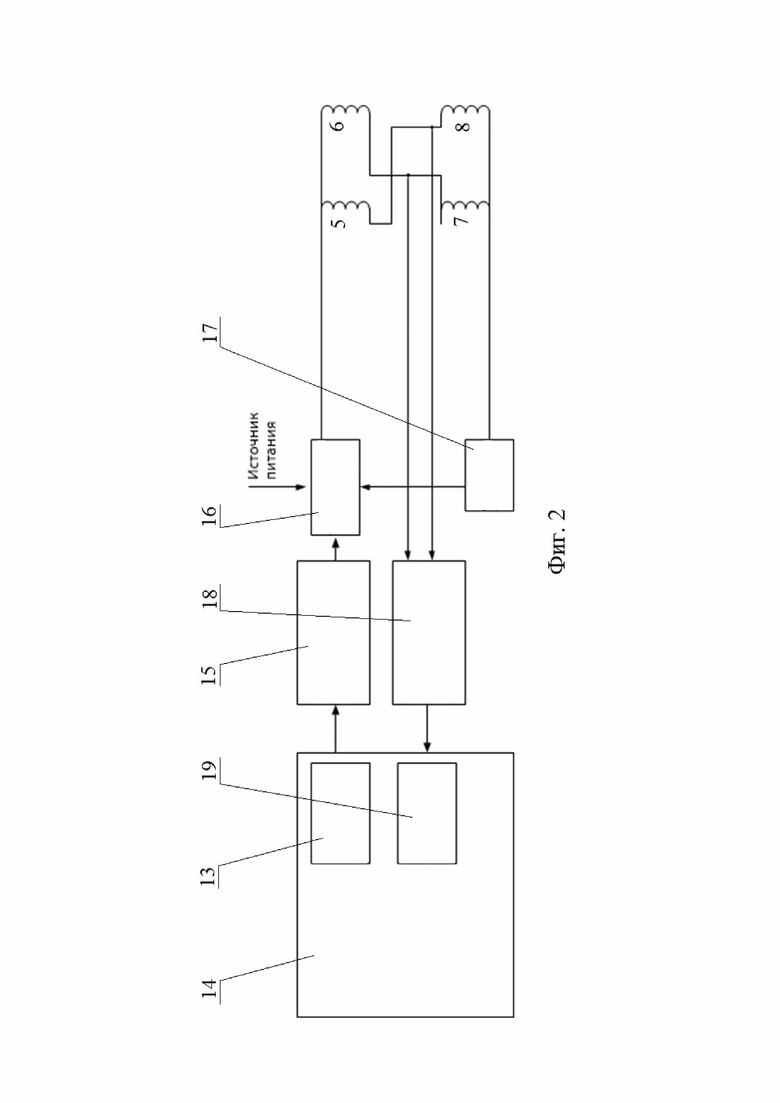
Изобретение поясняется чертежами, где на фиг. 1 схематично показан предложенный датчик; на фиг. 2 схематично показано электрическое питание и управление датчиком.
Предложенный индуктивный датчик предназначен для измерения (определения) микроперемещений (отклонений) вращающихся деталей (например, роторов, валов, якорей и т.п.), в том числе в системах с активным магнитным подвесом, электрическими методами, и он выполнен с дифференциальным выходом.
Предложенный датчик содержит неподвижные ферромагнитные сердечники 1, 2, 3, 4. Сердечники 1 и 2 образуют одну пару сердечников, а сердечники 3 и 4 образуют другую пару сердечников. При этом предложенный датчик имеет, преимущественно, две пары сердечников (одна пара сердечников 1 и 2, а вторая пара сердечников 3 и 4). Однако предложенный датчик может иметь и большее число пар сердечников в зависимости от диаметра роторной части датчика для удобства изготовления и монтажа, но при всем этом общее число сердечников должно быть кратно четырем для сохранения электрической схемы соединения обмоток сердечника (если число сердечников больше четырех, катушки могут быть соединены параллельно).
Каждый сердечник 1, 2, 3, 4 содержит катушку индуктивности с обмотками 5, 6, 7, 8 соответственно. При этом катушки индуктивности всех сердечников 1, 2, 3, 4 (а при большем числе пар сердечников и катушки индуктивности всех остальных сердечников) имеют, одинаковое число витков, что дает симметричность сигнала при смещении относительно центра (при разном числе витков работоспособность предложенного датчика также обеспечивается, но сигнал не будет симметрично меняться при смещении ротора в разные стороны).
В воздушном зазоре между сердечниками 1, 2, 3 и 4 (между одними концами сердечников 1, 2, 3, 4) расположен ротор 9 (вал, якорь). Ротор 9 может быть выполнен шихтованным, что позволяет уменьшить вихревые токи, которые увеличивают энергопотребление и искажают форму сигнала с датчика.
Сердечники 1 и 2 одной пары сердечников, а также сердечники 3 и 4 другой пары сердечников соединены друг с другом магнитной цепью с зазором. Также сердечники 1 и 2 одной пары сердечников, а также сердечники 3 и 4 другой пары сердечников могут быть объединены между собой с помощью статора 10, расположенного на других концах сердечников 1, 2, 3, 4 соответствующей пары сердечников, расположенных дальше от ротора 9. При этом статор 10 каждой пары сердечников может быть выполнен шихтованным, что позволяет уменьшить вихревые токи, которые увеличивают энергопотребление и искажают форму сигнала с датчика.
Соединение друг с другом в каждой паре сердечников 1, 2 и 3, 4, в том числе с использованием статора 10, обеспечивает замыкание магнитного потока, возникающего при подаче тока в обмотки 5, 6, 7, 8.
Обе пары сердечников (соответственно 1, 2 и 3, 4) расположены диаметрально противоположно в каждой паре, а при наличии в датчике большего числа пар сердечников (например, четыре пары или шесть пар, или восемь пар или большее число пар с сохранением кратности четырем), соответствующие пары также расположены диаметрально противоположно относительно ротора 9. Такое расположение позволяет уменьшить взаимовлияние показаний по взаимно перпендикулярным осям.
Вне зависимости от указанного числа пар сердечников, обмотка катушки индуктивности каждого сердечника одной пары сердечников соединена с обмотками катушек индуктивности обоих сердечников другой диаметрально противоположной пары сердечников.
На примере наличия двух пар сердечников, соединение обмоток катушек индуктивности осуществлено следующим образом. Обмотка 5 катушки индуктивности сердечника 1 соединена с обмотками 7 и 8 катушек индуктивности сердечников 3 и 4 соответственно. Обмотка 6 катушки индуктивности сердечника 2 соединена с обмотками 7 и 8 катушек индуктивности сердечников 3 и 4 соответственно. Обмотка 7 катушки индуктивности сердечника 3 соединена с обмотками 5 и 6 катушек индуктивности сердечников 1 и 2 соответственно. Обмотка 8 катушки индуктивности сердечника 4 соединена с обмотками 5 и 6 катушек индуктивности сердечников 1 и 2 соответственно.
Кроме того, при указанном соединении обмоток (для любого указанного числа диаметрально противоположно расположенных пар сердечников), соединение обмоток 5, 6, 7, 8 с помощью коротких витых пар 11 осуществлено так, что все витки имеют одинаковую направленность для обеспечения направления магнитного потока в сердечниках.
Такая схема электрического соединения обмоток 5, 6, 7, 8 позволяет увеличить помехоустойчивость и чувствительность предложенного индуктивного датчика перемещений, а также снизить влияние внешних факторов на показания измерений. В результате этого существенно повышается точность измерения микроперемещений вращающихся деталей (роторов, валов, якорей и т.п.) в системе с активным магнитным подвесом.
В качестве источника 12 питания используется источник синусоидального тока I_sin=I*sin(wt). Задающим устройством сигнала является источник 13 задания напряжения вычислительного устройства 14, формирующее синусоидальный сигнал задания напряжения регулируемой амплитуды и частоты (например, с использованием цифро-аналогового преобразователя 15) Источник тока формируется за счет схемной реализации обратной связи по току за счет усилителя 16 и датчика 17 тока.
Работает предложенный датчик следующим образом.
При смещении ротора 9 в вертикальном направлении изменяются индуктивности обмоток 5, 6, 7, 8, следовательно, изменяется их индуктивное сопротивление. В результате на выходе появляются два сигнала напряжения U_вых1 и U_вых2.
При смещении ротора 9 вверх индуктивность обмотки 5 увеличивается, а индуктивность обмотки 7 уменьшается и получается сигнал напряжения U_вых2. Кроме этого, индуктивность обмотки 6 увеличивается, а индуктивность обмотки 8 уменьшается и получается сигнал напряжения U_вых1. Схема включения обмоток 5, 6, 7, 8 такова, что сигналы U_вых1 и U_вых2 находятся в противофазе. Сигналы U_вых1 и U_вых2 можно передавать по линии типа «витая пара», которая является помехоустойчивой к внешним помехам. Вычислительное устройство 13 с помощью датчика (например, дифференциального усилителя и дифференциального аналого-цифрового преобразователя 18) считывает разницу сигналов U_вых1 и U_вых2.
В итоге в вычислительном устройстве 13 получают дифференциальный сигнал от двух сигналов U_вых1=A*sin(wt+φ) и U_вых2=-A’*sin(wt+φ), где
А – амплитуда синусоидального напряжения в точке соединения между катушками 6 и 8;
A’ – амплитуда синусоидального напряжения в точке соединения между катушками 5 и 7;
w – угловая частота;
t – время;
φ – сдвиг по фазе выходного напряжения относительно тока электропитания датчика.
В результате на устройство 19 считывания сигнала поступает гармоническое значение сигнала (A+A’)*sin(wt+φ), амплитуда которого пропорциональна смещению ротора 9. Вычислительное устройство 13 определяет интегральное значение за период произведения Х=∫(I*sin(wt)*(A+A’)*sin(wt+φ)), которое пропорционально смещению ротора 9.
Программная обработка полученного сигнала позволяет снизить влияние помех.
Таким образом, описанное расположение сердечников 1, 2, 3, 4 относительно ротора 9, описанная схема соединения обмоток 5, 6, 7, 8, а также питание датчика источником переменного тока позволяет повысить помехоустойчивость и чувствительность предложенного датчика, дифференциальная схема соединения и программная обработка позволяет снизить влияние помех (внешних факторов) на показания датчика, что существенно повышает точность измерения микроперемещений вращающихся деталей (роторов, валов, якорей и т.п.).
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный датчик углов наклона | 1990 |
|
SU1783291A1 |
| Устройство измерения крутящего момента вала | 2022 |
|
RU2795384C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2401499C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416858C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437198C1 |
| КОЛЛЕКТОРНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ С ПОЛЮСНЫМ ЯКОРЕМ | 2009 |
|
RU2390087C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ДВУХПАКЕТНЫМ ИНДУКТОРОМ (ВАРИАНТЫ) | 2008 |
|
RU2356154C1 |
| МОДУЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414791C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения микроперемещений вращающихся деталей, в том числе в системах с активным магнитным подвесом. Индуктивный датчик перемещений содержит по меньшей мере две пары сердечников с катушками индуктивности и расположенный между сердечниками ротор. По меньшей мере две пары сердечников расположены диаметрально противоположно в каждой паре, а обмотка катушки индуктивности каждого сердечника одной пары сердечников соединена с обмотками катушек индуктивности обоих сердечников другой диаметрально противоположной пары сердечников. Техническим результатом изобретения является повышение помехоустойчивости и чувствительности индуктивного датчика перемещений, а также снижение влияния внешних факторов на показания датчика. 4 з.п. ф-лы, 2 ил.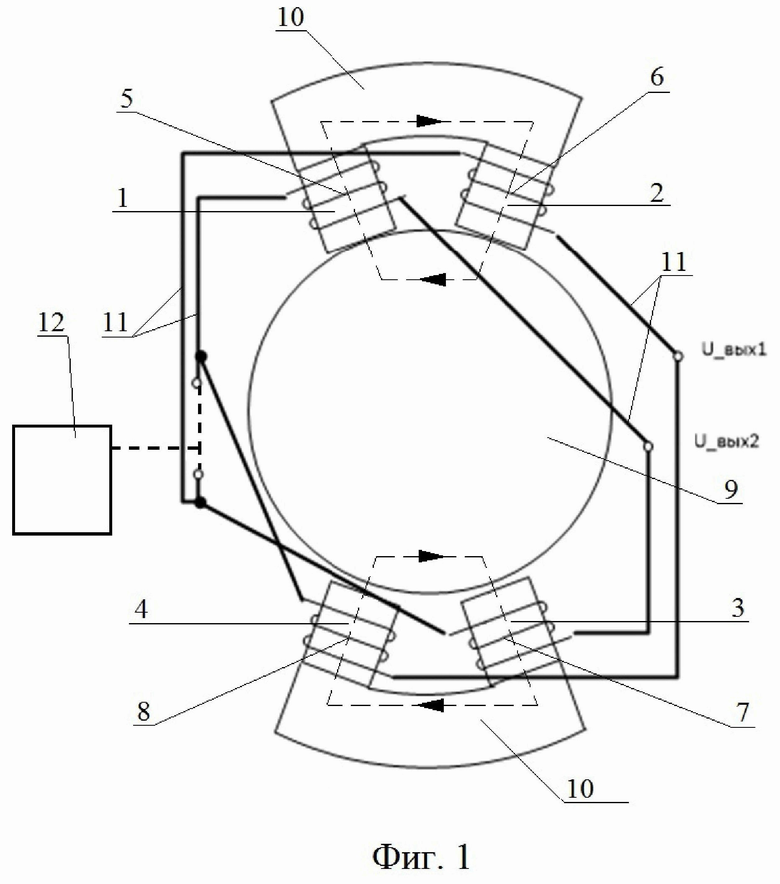
1. Индуктивный датчик перемещений, содержащий по меньшей мере две пары сердечников с катушками индуктивности и расположенный между сердечниками ротор, по меньшей мере две пары сердечников расположены диаметрально противоположно в каждой паре, отличающийся тем, что обмотка катушки индуктивности каждого сердечника одной пары сердечников соединена с обмотками катушек индуктивности обоих сердечников другой диаметрально противоположной пары сердечников, витки обмоток всех катушек индуктивности имеют одинаковую направленность, при этом датчик выполнен с возможностью питания источником переменного тока.
2. Датчик по п.1, отличающийся тем, что ротор выполнен шихтованным.
3. Датчик по п.1, отличающийся тем, что сердечники в каждой паре сердечников соединены друг с другом шихтованным статором.
4. Датчик по п.1, отличающийся тем, что он имеет более двух пар сердечников, при этом общее число сердечников кратно четырем.
5. Датчик по п.1, отличающийся тем, что первый сердечник по меньшей мере одной пары сердечников и первый сердечник по меньшей мере другой пары сердечников расположены диаметрально противоположно ротору, при этом второй сердечник по меньше мере одной пары сердечников и второй сердечник по меньшей мере другой пары сердечников расположены диаметрально противоположно ротору.
| БЕСКОНТАКТНЫЙ ДАТЧИК ДЛЯ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЙ РОТОРА | 2014 |
|
RU2663247C2 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2000 |
|
RU2197712C2 |
| US 4692699 A, 08.09.1987 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОЧИСТКИ СОЛЕНОЙ ВОДЫ | 2013 |
|
RU2630541C2 |

