11
Изобретение относится к автоматическому управлению и может быть использовано для управления вентильными двигателями.
Известен датчик положения ротора фазовращатель, подключенный к генератору, квантующий генератор, фазовый инвертор, переключающие устройства, фазовращатель через первое и второе переключающие устройства подключен к усилителю-ограничителю, а квантующий генератор подключен к первому переключающему устройству непосредственно, а к второму - через фазовый инвертор Г1 .
Недостатком такого датчика является невозможность получения выходных сигналов с изменяемой обратно пропорционально частоте вращения ротора относительной длительностью.
Наиболее близким техническим решением к предлагаемому является индуктивный датчик положения ротора содержащий постоянный магнит, рас- положен{ ый на валу, вокруг которого расположены чувствительные элементы первые выводы которых соединены с первым выводом одной обмотки трансформатора питания, а вторые выводы соединены с первым выводом первой и второй обмоток согласующего трансформатора, вторые выводы которгых со€эдинены с вторым выводом одной обмотки трансформатора питания, выводы третьей обмотки согласующего трансформатора соединены соответственно с первым выходом выпрямительного моста и коллектором первого тразистора, первый вывод четвертой обмотки согласующего трансформатора соединен с базой и первьм вьшодом первого резистора, а второй вывод с эмиттером первого транзистора, вторым выводом первого резистора и вторым выходом выпрямительного моста, первый вход которого соединен с первым выводом второй обмотки трансформатора питания, а второй вход выпрямительного моста соединен с первыми выводами сглаживающего дросселя и конденсатора, второй вывод которого соединен с вторым выводом второй обмотки трансформатора питания и первым выводом второго резистора, второй вывод которого соединен со сглаживающим дросселем С21.
Недостатком известного датчика является невозможность его приме32
нения в системах, требующих регулирования и стабилизацию скорости врап;ения вентильных двигателей.
Цель изобретения - расширение области применения индуктивного датчика положения ротора.
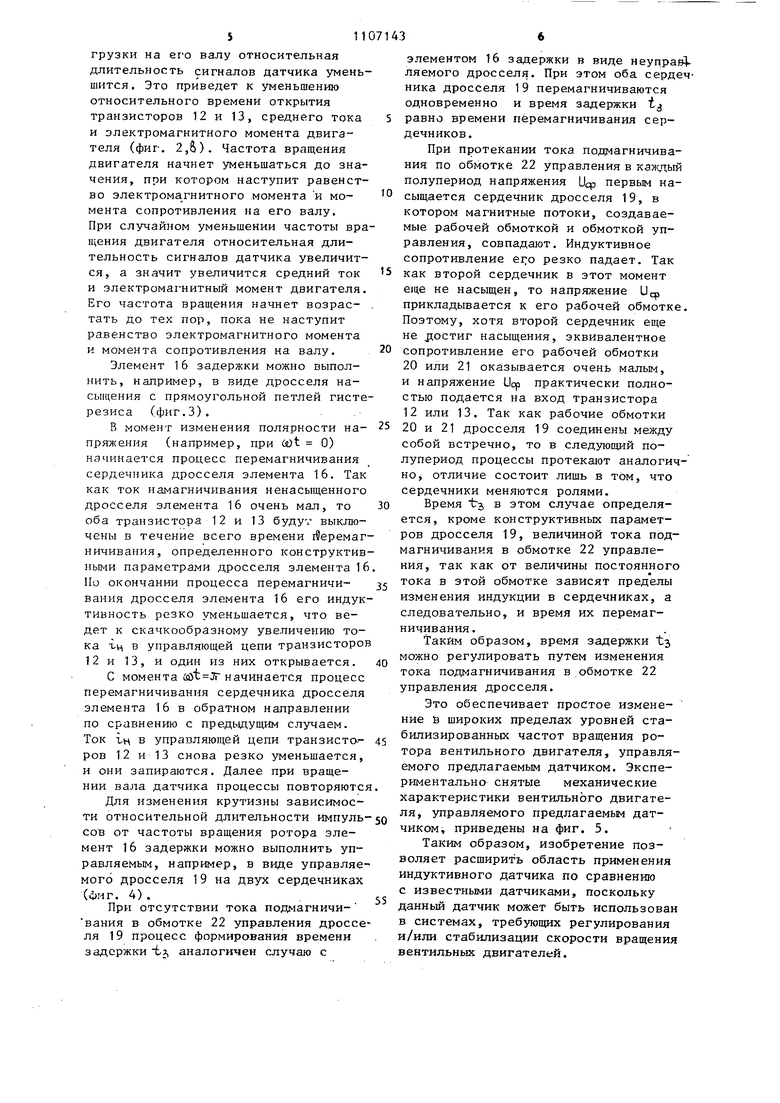
Поставленная цель достигается тем, что в индуктивньш датчик положения ротора, содержащий постоянный магнит, установленный на валу, вокруг которого расположены чувствительные элементы, первые выводы которых соединены с первым выводом первой обмотки трансформатора питания, а вторые - соответственно с первым выводом первой и второй обмоток согласующего трансформатора, вторые выводы которых соединены с вторым выводом первой обмотки трансформатора питания, выводы третьей обмотки согласующего трансформатора соединены соответственно с первым выходом выпрямительного моста и коллектором первого транзистора, первый вывод четвертой обмотки согласующего трансформатора соединен с базой, а второй - с эмиттером первого транзистора и вторым выходом выпрямительного моста, первый вход которого соединен с первым выводом второй обмотки трансформатора питания, а второй вход выпрямительного моста соединен с первыми выводами сглаживающего дросселя и конденсатора, второй вывод которого соединен с вторым выводом второй обмотки трансформатора питания и первым выводом резистора, введены элемент задержки, второй и третий транзисторы, первый, второй и третий диоды, второй вывод сглаживающего дросселя соединен через элемент задержки с базой второго транзистора, вторым выводом резистора и первым выводом первого диода, второй вывод которого соединен с эмиттерами: второго и третьего транзисторов и через второй диод с базой третьего транзистора и первым выводом резистора, а эмиттеры второго и третьего транзисторов соединены с шиной питания, вьшоды ретьего диода соединены с соответствующими выводами четвертой обмоти согласующего трансформатора, кол екторы второго и третьего транисторов являются выходами индуктивого датчика. 311 Элемент задержки выполнен в виде дросселя насыщения с прямоугольной петлей гистерезиса. Кроме того, элемент задержки выполнен в виде управляемого дросселя на двух сердечниках с прямоугольной петлей гистерезиса, содержащего две рабочие обмотки, размещенные по отдельности на каждом сердечнике и соединение между собой последовательно встречно, и общую для обоих сердечников обмотку управления, подключенную к источник питания. На фиг. 1 приведена электрическа схема индуктивного датчика положени ротора; на фиг.2 - временные диагра мы, поясняющие принцип работы датчи ка; на фиг. 3 - индуктивный датчик положения ротора с элементом задерж ки в виде дросселя насыщения с прямоугольной петлей гистерезиса; на фиг. 4 - то же, с элементом задержки в виде управляемого дросселя на двух сердечниках; на фиг. 5 - механические характеристики вентильного двигателя, управляемого датчиком. Индуктивный датчик положения ротора содержит чувствительные элемен ты 1 и 2 (дроссели насыщения), подключенные к первичным обмоткам согласующего трансформатора 3, транзистор 4, выпрямительный мост 5, диод 6, трансформатор 7 питания с обмотками 8 и 9, конденсатор 10, сглаживающий дроссель 11, транзисторы 12 и 13, образующие коммутатор вентильного двигателя, диоды 14 и 15, элемент 16 задержки, резистор 17, постоянный магнит 18. Элемент 16 задержки может быть выполнен либо в виде дросселя насыщ ния, либо в виде управляемого дросселя 19 с рабочими обмотками 20 и 21 и обмоткой 22 управления и источ ника 23 питания. Индуктивный датчик положения ротора работает следующим образом. При наличии напряжения повышенно частоты на обмотках 8 и 9 трансформатора и при вращении вала датчика с угловой скоростью (SU постоянный магнит 18 поочередно намагничивает сердечники чувствительных элементов 1 и 2. В момент изменения состояний сердечников чувствительных элементов 1 и 2 происходит скачкообраз ное (релейное) изменение полярности напряжения Uq)на выходе .дросселя 11 (фиг. 2,а, например, при иН- 0). С этого момента начинается отсчет времени задержки tj (фиг. 2,сГ), в течение которого элемент 16 задержки пропускает очень малый ток, и оба транзистора 12 и 13 будут выключены. По окончании времени ti сопротивление элемента 16 задержки резко уменьшается, что ведет к скачкообразному увеличению тока Ьц в управляющей цепи транзисторов 12 и 13 (ф;:г. 2J) . При этом один из транзисторов 12, 13 насыщается, а другой надежно запирается падением напряжения на диоде 15,14, шунтирующем его база-эмиттерный переход. При ()t -3i происходит изменение полярности напряжения Uc на выходе дросселя 11 (фиг. 2,а) . С этого момента снова начинается процесс формирования времени задержки, в течение которого ток tn в управляющей цепи очень мал, и транзисторы 12 и 13 снова оказываются запертыми (фиг. 2сГ, при и) ). В дальнейшем при вращении вала датчика описанные процессы будут повторяться. Относительную длительность импульсов тока i в нагрузке датчика можно определить из выражения Т - 2t где Сц - длительность импульсов токаТ - период повторения сигналов ДПР; tj- время задержки. Из выражения (1) видно, что при увеличении угловой скорости и) вращения вала датчика и при постоянном времени задержки будет уменьшаться относительная длительность ь импульсов тока г-н в нагрузке датчика, т.е. 1 и Ой в предлагаемом датчике связаны обратно пропорциональной зависимостью. Транзисторы 12 и 13 используются для подачи напряжения питания на секции вентильного двигателя (не показаны), и описанное свойство датчика уменьщать относительную длительность импульсов обратно пропор- ционально частоте вращения ротора будет вызьшать стабилизацию частоты вращения двигателя. Действительно, при увеличении частоты вращения двигателя,например,из-за уменьшения нагрузкн на его валу относительная длительность сигналов датчика умень шится. Это приведет к уменьшению относительного времени открытия транзисторов 12 и 13, среднего тока и электромагнитного момента двигателя (фиг, 2,&). Частота вращения двигателя начнет уменьшаться до значения, при котором наступит равенство электрома гнитного момента и момента сопротивления на его валу. При случайном уменьшении частоты вра щения двигателя относительная длительность сигналов датчика увеличится, а значит увеличится средний ток и электромагнитный момент двигателя Его частота врап1ения начнет возрастать до тех пор, пока не наступит равенство электромагнитного момента и момента сопротивления на валу. Элемент 16 задержки можно выполнить, например, в виде дросселя насыщения с прямоугольной петлей гисте резиса (фиг,3).. В момент изменения полярности напряжения (например, при OOt 0) начинается процесс перемагничивания сердечника дросселя элемента 16, Так как ток намагничивания ненасыщенного дросселя элемента 16 очень мал, то оба транзистора 12 и 13 будут выключены в течение всего времени йеремаг ничивания, определенного конструктив ными параметрами дросселя элемента 1 По окончании процесса перемагничивания дросселя элемента 16 его индук тивность резко уменьшается, что ведет к скачкообразному увеличению тока ч-ц в управляющей цепи транзисторо 12 и 13, и один из них открывается, С момента начинается процесс перемагничивания сердечника дросселя элемента 16 в обратном направлении по сравнению с предыдущим случаем. Ток it в управляющей цепи транзистаров 12 и 13 снова резко уменьшается и они запираются. Далее при вращении вала датчика процессы повторяютс Для изменения крутизны зависимости относительной длительности импуль сов от частоты вращения ротора элемент 16 задержки можно выполнить управляемым, например, в виде управляе мого дросселя 19 на двух сердечниках (4;иг, 4) . При отсутствии тока подмагничивания в обмотке 22 управления дросс ля 19 процесс формирования времени задержки tj, аналогичен случаю с элементом 16 задержки в виде неуправ ляемого дросселя. При этом оба сердечника дросселя 19 перемагничиваются одновременно и время задержки tj равно времени перемагничивания сердечников. При протекании тока подмагничивания по обмотке 22 управления в каясдый полупериод напряжения Ucp первым насыщается сердечник дросселя 19, в котором магнитные потоки, создаваемые рабочей обмоткой и обмоткой управления, совпадают. Индуктивное сопротивление его резко падает. Так как второй сердечник в этот момент еще не насыщен, то напряжение UCD прикладывается к его рабочей обмотке. Поэтому, хотя второй сердечник еще не достиг насыщения, эквивалентное сопротивление его рабочей обмотки 20 или 21 оказывается очень малым, и напряжение (Jcp практически полностью подается на вход транзистора 12 или 13. Так как рабочие обмотки 20 и 21 дросселя 19 соединены между собой встречно, то в следующий полупериод процессы протекают аналогично, отличие состоит лишь в том, что сердечники меняются ролями. Время Ьз, в этом случае определяется, кроме конструктивных параметров дросселя 19, величиной тока подмагничивания в обмотке 22 управления, так как от величины постоянного тока в этой обмотке зависят пределы изменения индукции в сердечниках, а следовательно, и время их перемагничивания. Таким образом, время задержки tj можно регулировать путем изменения тока подмагничивания в обмотке 22 управления дросселя. Это обеспечивает простое изменение & широких пределах уровней стабилизированных частот вращения ротора вентильного двигателя, управляемого предлагаемым датчиком. Экспериментально снятые механические характеристики вентильного двигателя, управляемого предлагаемым датчиком, приведены на фиг. 5. Таким образом, изобретение позволяет расширить область применения индуктивного датчика по сравнению с известными датчиками, поскольку данный датчик может быть использован в системах, требующих регулирования и/или стабилизации скорости вращения вентильных двигателей.
2 I/J
Кч Jf
Фиг.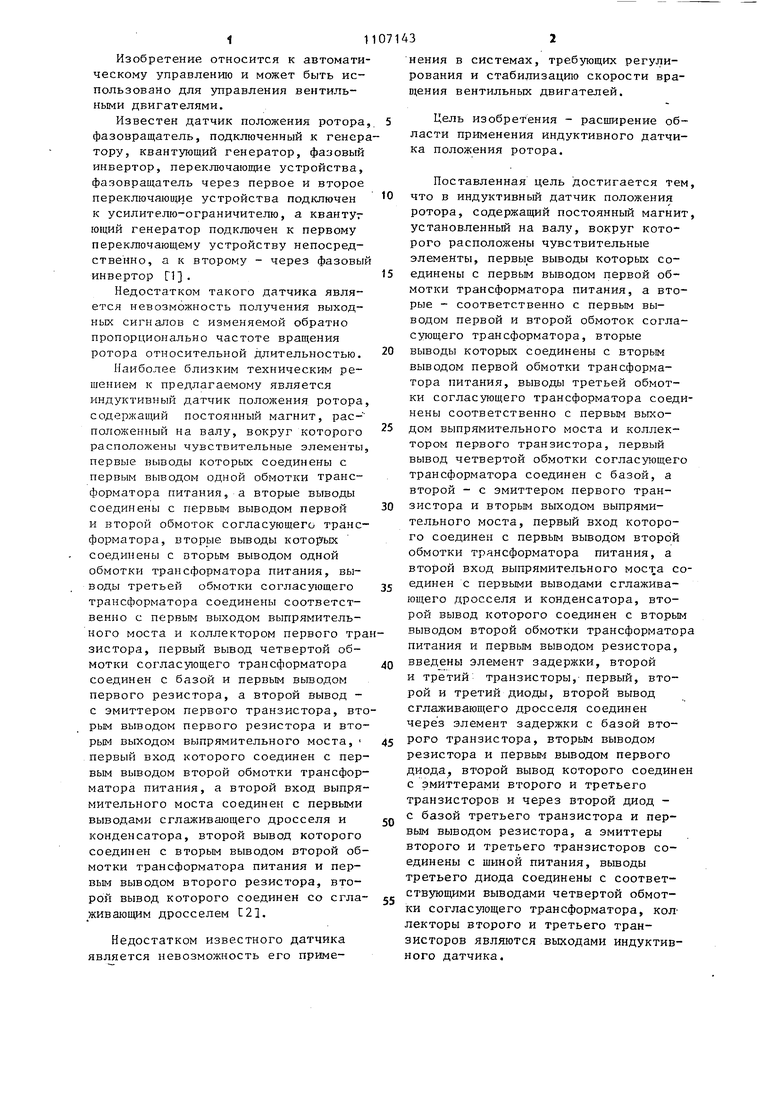

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1989 |
|
SU1698937A1 |
| Индуктивный датчик положения ротора | 1977 |
|
SU658674A2 |
| Индуктивный датчик положения ротора | 1985 |
|
SU1346947A2 |
| Вентильный электродвигатель | 1982 |
|
SU1023565A1 |
| Индуктивный датчик положения | 1980 |
|
SU881525A1 |
| Индуктивный датчик положения ротора | 1975 |
|
SU604092A2 |
| Индуктивный датчик положения | 1987 |
|
SU1415050A1 |
| Асинхронный вентильный каскад | 1983 |
|
SU1092689A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1991 |
|
RU2007010C1 |
| КОРРЕКТОР КОЭФФИЦИЕНТА МОЩНОСТИ | 2011 |
|
RU2473109C1 |


1. ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА, содержащий постоянный магнит, установленный на валу, вокруг которого расположены чувствительные элементы, первые выводы которых соединены с первым выводом первой обмотки трансформатора питания, а вторые - соответственно с первым выводом первой и второй обмоток согласующего трансформатора, вторые выводы которых соединены с вторьм выводом первой обмотки трансформатора питания, выводы третьей обмотки согласующего трансформатора соединены соответственно с первым выходом выпрямительного моста и коллектором nepiBoro транзистора,первьш вывод четвертой обмотки согласующего трансформатора соединен с базой,а второй - с эмиттером первого транзистора и вторым выходом выпрямительного моста, первый вход которого соединен с первым выводом второй обмотки трансформатора питания, второй вход выпрямительного моста соединен с первыми выводами сглаживающего дросселя и конденсатора, второй вывод которого соединен с вторым выводом второй обмотки трансформатора питания и первым выводом резистора, отличающийся тем, что, с целью расширения области применения датчика, в него введены элемент задержки, второй и третий транзисторы, первый,второй и третий диоды, второй вывод сглаживающего дросселя соединен через элемент задержки с базой второго транзистора, вторым выводом резистора и первым выводом первого диода, второй вывод которого соединен с эмиттерами второго и третьего транзисторов и через второй диод - с базой третьего транзистора и первым выводом резистора, а эмиттеры второго и третьего транзисторов соеди(Л нены с шиной питания, выводы третьего диода соединеньЬ с соответствующими выводами четвертой обмотки согласующего трансформатора, коллекторы второго и третьего транзисторов являются выходами индуктивного датчика. 2.Датчик по п. 1, отличающийся тем, что элемент задержки выполнен в виде дросселя насыщения с прямоугольной петлей гисте4 резиса. со 3.Датчик по п. 1, отличающийся тем, что элемеггт задержки выполнен в виде управляемого дросселя на двух сердечниках с прямоугольной петлей гистерезиса, содержащего две рабочие обмотки, размещенные по отдельности па каждом сердечнике и соединенные между собой последовательно встречно, и общую для обоих сердечников обмотку управления, подключенную к источнику питания.
О
t,
41
-
2К
Jjfut
Фиг.2 / Фиг.З 12 ph f rs
Л,
off/мин 7000
6000
5000
tffOO
2000
то
50
100 150
подм ЦОмА
Естестб. х-ка
.1подм.2иЛ
«
поЗм гвм
200
250 300 М. ГСМ Фиг.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ — КОД | 1972 |
|
SU425199A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ВСЕСОЮЗНАЯ | 0 |
|
SU377850A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
