Область техники
Изобретение относится к способу управления транспортным средством и устройству управления транспортным средством.
Уровень техники
В публикации JP 2013-189136 раскрыта технология поддержания частоты вращения электромотора-генератора, равной постоянной частоте вращения, когда транспортное средство остановлено, в транспортном средстве, содержащем фрикционную муфту, которая соединяет/разъединяет передачу крутящего момента между электромотором-генератором и ведущими колесами.
Задача, решаемая изобретением
Тем не менее, в традиционной технологии, описанной выше, поскольку, электромотор-генератор приводится в действие, даже когда транспортное средство остановлено, существует запас для улучшения эффективности использования топлива.
Целью настоящего изобретения является создание способа управления транспортным средством и устройства управления транспортным средством, которые могут улучшать эффективность использования топлива электромотором-генератором.
Средство решения задачи
В настоящем изобретении фрикционная муфта транспортного средства удерживается разъединенной, с устраненным зазором хода, в то время как транспортное средство остановлено; в ответ на запрос, чтобы останавливать электромотор-генератор, если частота вращения электромотора для электромотора-генератора больше заданной частоты вращения, частота вращения электромотора уменьшается с помощью заданной частоты вращения в качестве целевой частоты вращения электромотора, и когда частота вращения электромотора достигла заданной частоты вращения, частота вращения электромотора уменьшается до нуля, при этом на крутящий момент электромотора-генератора накладывается ограничение.
Преимущества изобретения
Следовательно, согласно настоящему изобретению можно улучшать эффективность использования топлива электромотором-генератором.
Краткое описание чертежей
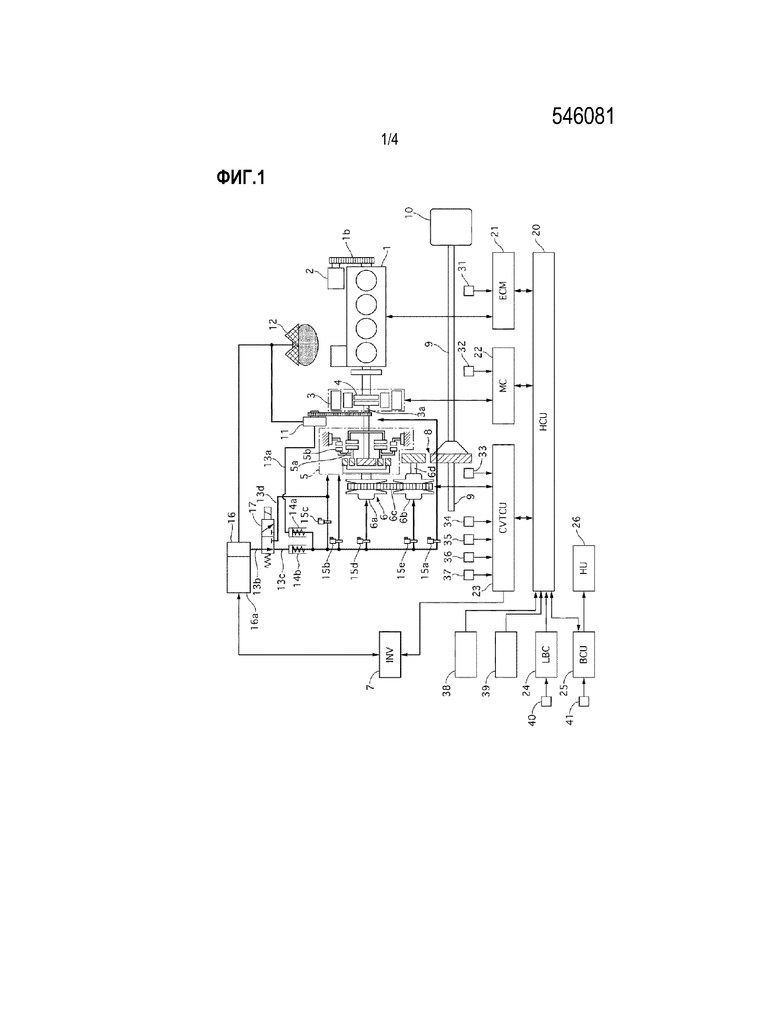
Фиг. 1 является схемой конфигурации силовой цепи гибридного FF-транспортного средства в первом варианте осуществления.
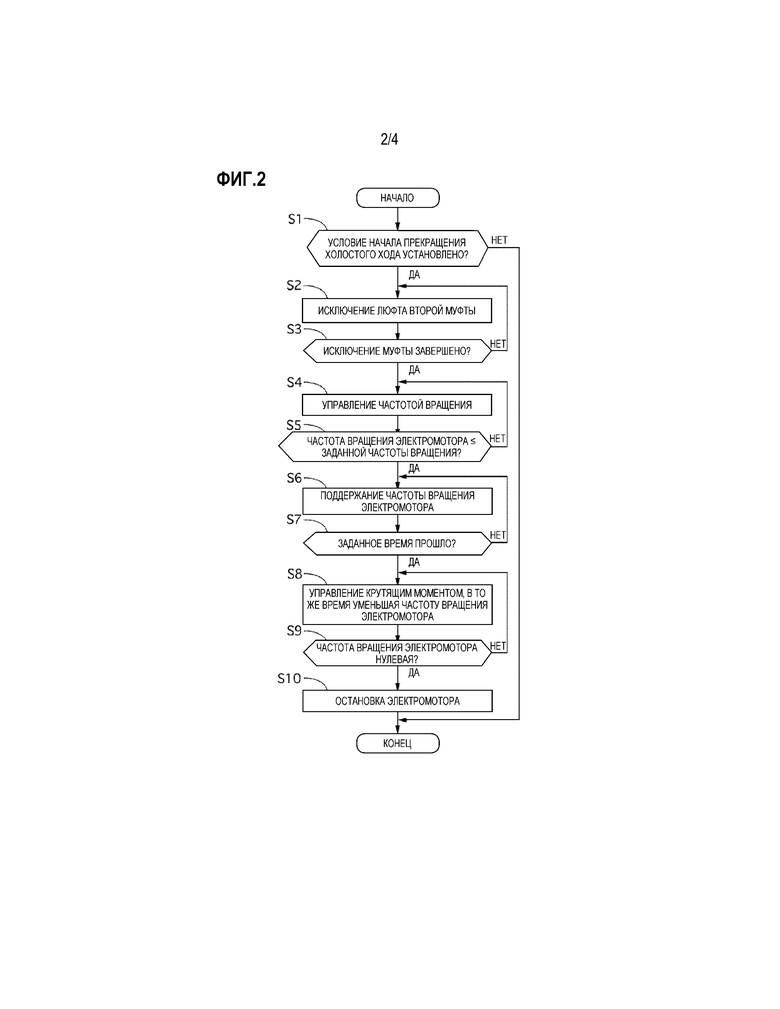
Фиг. 2 является блок-схемой последовательности операций, иллюстрирующей последовательность операций процесса остановки электромотора посредством HCM 20 первого варианта осуществления.
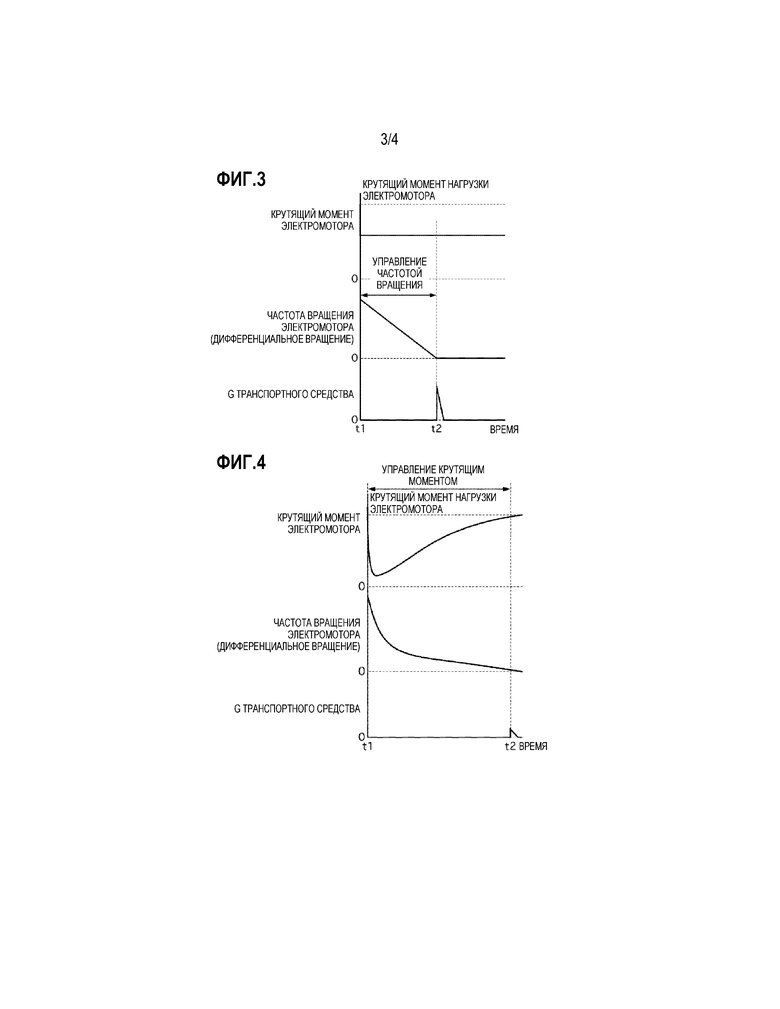
Фиг. 3 является временной диаграммой сравнительного примера, в котором вращение электромотора-генератора 3 останавливается посредством только управления частотой вращения во время процесса остановки электромотора.
Фиг. 4 является временной диаграммой сравнительного примера, в котором вращение электромотора-генератора 3 останавливается посредством только управления крутящим моментом во время процесса остановки электромотора.
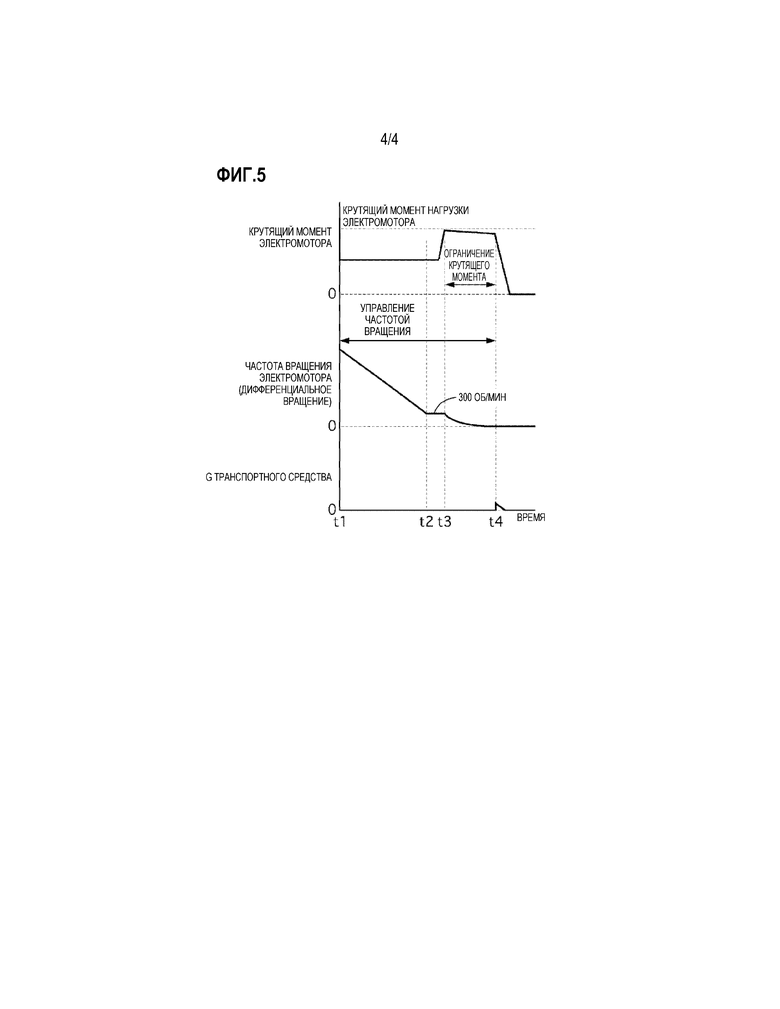
Фиг. 5 является временной диаграммой, иллюстрирующей действие ограничения крутящего момента первого варианта осуществления.
Перечень ссылочных позиций
3 - электромотор-генератор
5 - вторая муфта (фрикционная муфта)
10 - передние колеса (ведущие колеса)
11 - основной механический масляный насос (механический масляный насос)
16 - вспомогательный электрический масляный насос (электрический масляный насос)
16a - электромотор
20 - гибридный модуль управления (модуль управления)
Подробное описание вариантов осуществления изобретения
Первый вариант осуществления
Силовая цепь
Фиг. 1 является конфигурационным видом силовой цепи гибридного FF-транспортного средства первого варианта осуществления.
Двигатель 1 является поперечно расположенным двигателем, который располагается в переднем отсеке, так что направление оси вращения коленчатого вала 1a ориентировано в направлении ширины транспортного средства. Стартерный электромотор 2 зацепляется с шестерней 1b запуска двигателя, предоставленной относительно коленчатого вала 1a. Стартерный электромотор 2 использует 12-вольтный аккумулятор, который не показан, в качестве источника питания. 12-вольтный аккумулятор заряжается посредством стартерного электромотора 2, функционирующего в качестве генератора в ходе работы двигателя 1. Помимо этого, 12-вольтный аккумулятор заряжается электрической мощностью из литий-ионного аккумулятора, который не показан, через преобразователь постоянного тока (не показан).
Один из выходных валов 3a электромотора электромотора-генератора 3 соединяется с двигателем 1 через первую муфту 4, и другой соединяется с ременной бесступенчатой трансмиссией (CVT) 6 через вторую муфту 5. Электромотор-генератор 3 является синхронным электромотором с постоянными магнитами, использующим трехфазный переменный ток, и использует литий-ионный аккумулятор в качестве источника питания. Инвертор 7 подключается к обмотке статора электромотора-генератора 3. Инвертор 7 преобразует электрическую мощность постоянного тока из литий-ионного аккумулятора в электрическую мощность трехфазного переменного тока в ходе подачи питания электромотора-генератора 3 и подает ее в электромотор-генератор 3. Помимо этого, инвертор 7 преобразует электрическую мощность трехфазного переменного тока, сформированную посредством электромотора-генератора 3, в постоянный ток во время рекуперации электромотора-генератора 3, и заряжает литий-ионный аккумулятор.
Первая муфта 4 является нормально замкнутой, сухой, однодисковой фрикционной муфтой, которая может непрерывно изменять предельную нагрузку по зацеплению согласно подаваемому давлению гидравлического масла. Первая муфта 4 предоставляется в корпусе электромотора-генератора 3. Муфта 5a переднего хода и тормоз 5b заднего хода, которые предоставляются в механизме переключения переднего/заднего хода CVT 6 посредством шестерен планетарной передачи, отводятся для использования в качестве второй муфты 5. Муфта 5a переднего хода и тормоз 5b заднего хода являются оба нормально разомкнутыми, мокрыми, однодисковыми фрикционными муфтами, которые могут непрерывно изменять предельную нагрузку по зацеплению согласно поданному давлению гидравлического масла. В нижеприведенном описании, муфта 5a переднего хода и тормоз 5b заднего хода совместно упоминаются в качестве второй муфты 5, кроме тех случаев, когда для этого предоставляются отдельные описания. CVT 6 является трансмиссией, которая может достигать бесступенчатого передаточного отношения путем изменения диаметра намотки ремня 6c согласно давлению гидравлического масла, которое подается в соответствующую камеру цилиндра первичного шкива 6a и вторичного шкива 6b. Выходной вал 6d CVT 6 подключается к левым и правым передним колесам 10, которые являются ведущими колесами, через конечную понижающую зубчатую передачу 8, дифференциал (не показан) и левые и правые приводные валы 9.
Основной механический масляный насос (масляный насос) 11 накачивает и нагнетает под давлением масло, накапливаемое в маслосборнике 12, и выпускает его в масляный канал 13a. Основной механический масляный насос 11 приводится в действие вращательным образом посредством выходного вала 3a электромотора. Масло, которое выпускается в масляный канал 13a, проходит через пластинчатый клапан 14a, затем регулируется по давлению гидравлического масла посредством соответствующих пропорциональных соленоидов 15a, 15b, 15с, 15d, 15e и затем соответственно подается в первую муфту 4, муфту 5a переднего хода второй муфты 5, тормоз 5b заднего хода второй муфты 5, первичный шкив 6a и вторичный шкив 6b. Пластинчатый клапан 14a является одноходовым клапаном, который открывается когда давление равно или выше заданного давления.
Вспомогательный электрический масляный насос (электрический масляный насос) 16 накачивает и нагнетает под давлением масло, накапливаемое в маслосборнике 12, и выпускает его в масляный канал 13b. Вспомогательный электрический масляный насос 16 приводится в действие вращательным образом посредством электромотора 16a, который использует литий-ионный аккумулятор в качестве источника питания. Ввиду стоимости и простоты и удобства монтажа, вспомогательный электрический масляный насос 16 использует масляный насос с меньшей производительностью, чем основной механический масляный насос 11. Масло, которое выпускается в масляный канал 13b, подается в один из масляного канала 13c и масляного канала 13d посредством переключающего клапана 17. Переключающий клапан 17 соединяет масляный канал 13b и масляный канал 13c во время отключения питания и соединяет масляный канал 13b и масляный канал 13d во время подачи питания. Масло, которое подается в масляный канал 13c, проходит через пластинчатый клапан 14b, затем регулируется по давлению гидравлического масла посредством соответствующих пропорциональных соленоидов 15a, 15b, 15с, 15d, 15e и затем соответственно подается в первую муфту 4, муфту 5a переднего хода второй муфты 5, тормоз 5b заднего хода второй муфты 5, первичный шкив 6a и вторичный шкив 6b. Пластинчатый клапан 14b является одноходовым клапаном, который открывается когда давление равно или выше заданного давления. Масло, которое подается в масляный канал 13d, подается в муфту 5a переднего хода в качестве резервного гидравлического давления для исключения люфта, который исключает зазор из хода муфты 5a переднего хода. Переключающий клапан 17 включается, когда удовлетворяется условие начала прекращения холостого хода. Исключение люфта второй муфты 5 (муфты 5a переднего хода) дополнительно описывается ниже.
Режим движения
Силовая цепь с двумя муфтами и одним электромотором, описанная выше, имеет три режима движения: "EV-режим движения," "HEV-режим движения" и " WSC-режим движения".
В EV-режиме движения движение выполняется с использованием только электромотора-генератора 3 в качестве источника приведения в движение с расцепленной первой муфтой 4 и зацепленной второй муфтой 5. "Зацепление" означает состояние полного зацепления, в котором не разрешается разностное вращение между вводом и выводом. Электромотор-генератор 3 выполняет управление крутящим моментом на основе целевого крутящего момента электромотора, и целевой крутящий момент электромотора задается согласно требуемому крутящему моменту приведения в движение, который определяется из величины открытия позиции акселератора, скорости транспортного средства и т.п.
В HEV-режиме движения выполняется движение, в котором двигатель 1 включается в качестве источника приведения в движение с зацепленными первой муфтой 4 и второй муфтой 5. Целевой крутящий момент двигателя должен быть крутящим моментом двигателя, который может достигать рабочей точки с высокопроизводительной эффективностью двигателя 1. Электромотор-генератор 3 выполняет управление крутящим моментом на основе целевого крутящего момента электромотора, и целевой крутящий момент электромотора должен быть разностью между требуемым крутящим моментом приведения в движение и целевым крутящим моментом двигателя.
В WSC-режиме движения движение выполняется с использованием только электромотора-генератора 3 в качестве источника приведения в движение с расцепленной первой муфтой 4 и проскальзывающей второй муфтой 5. "Проскальзывание" означает состояние проскальзывающего зацепления, в котором разрешается разностное вращение между вводом и выводом. Целевая предельная нагрузка по зацеплению второй муфты задается согласно требуемому крутящему моменту приведения в движение. Частота вращения электромотора-генератора 3 управляется на основе целевой частоты вращения электромотора, и целевая частота вращения электромотора должна быть частотой вращения на холостом ходу двигателя 1.
Выбор режима движения делается на основе величины открытия позиции акселератора, скорости транспортного средства и SOC аккумулятора. Когда величина открытия позиции акселератора равна или меньше заданной величины открытия, выбирается EV-режим движения. Когда величина открытия позиции акселератора превышает заданную величину открытия, выбирается WSC-режим движения в области низкой скорости транспортного средства, и выбирается HEV-режим движения в области средних и высоких скоростей транспортного средства. WSC-режим движения выбирается даже когда величина открытия позиции акселератора равна или меньше заданной величины открытия, если SOC аккумулятора является низким.
Система управления силовой цепью
FF-гибридное транспортное средство первого варианта осуществления имеет в качестве конфигурации для того, чтобы управлять силовой цепью, гибридный модуль 20 управления (HCM), модуль 21 управления двигателем (ECM), контроллер 22 электромотора (MC), модуль 23 CVT-управления (CVTCU), контроллер 24 литий-ионного аккумулятора (LBC) и модуль 25 управления тормозом (BCU). Они соединяются через линию CAN-связи.
HCM (модуль управления) 20 управляет энергопотреблением всего транспортного средства и допускает функцию движения транспортного средства с максимальной эффективностью. HCM 20 вводит частоту вращения двигателя, обнаруженную посредством датчика 31 частоты вращения двигателя, частоту вращения электромотора, обнаруженную посредством датчика 32 частоты вращения электромотора, частоту вращения входного вала трансмиссии, обнаруженную посредством датчика 33 частоты вращения входного вала трансмиссии, первичное давление, обнаруженное посредством датчика 34 первичного гидравлического давления, вторичное давление, обнаруженное посредством датчика 35 вторичного гидравлического давления, гидравлическое давление муфты переднего хода (гидравлическое давление второй муфты), обнаруженное посредством датчика 36 гидравлического давления второй муфты, температуру масла, обнаруженную посредством датчика 37 температуры масла, величину открытия позиции акселератора, обнаруженная посредством датчика 38 величины открытия позиции акселератора, ход педали тормоза, обнаруженный посредством датчика 39 хода педали тормоза, SOC аккумулятора, температуру аккумулятора, обнаруженную посредством датчика 40 температуры аккумулятора и скорость транспортного средства, вычисленную из скорости каждого колеса, обнаруженной посредством датчика 41 скорости вращения колес, непосредственно или через CAN-связь. HCM 20 определяет рабочую точку силовой цепи и выбирает режим движения на основе каждого фрагмента входной информации и формирует каждое из целевых значений (целевой крутящий момент двигателя, целевой крутящий момент электромотора или целевую частоту вращения электромотора, целевую предельную нагрузку по зацеплению первой муфты, целевую предельную нагрузку по зацеплению второй муфты, целевое передаточное отношение, целевую степень замедления и т.п.) в соответствии с режимом движения и состоянием литий-ионного аккумулятора.
ECM 21 выводит команду для управления рабочей точкой двигателя в актуатор дроссельного клапана двигателя 1, на основе целевого крутящего момента двигателя и т.п. MC 22 выводит команду для управления рабочей точкой электромотора в инвертор 7, на основе целевого крутящего момента электромотора (или целевой частоты вращения электромотора). CVTCU 23 выводит команду для того, чтобы управлять предельной нагрузкой по зацеплению каждой из первой муфты 4 и второй муфты 5, в соответствующие пропорциональные соленоиды 15a, 15b, 15c, на основе целевой предельной нагрузки по зацеплению первой муфты и целевой предельной нагрузки по зацеплению второй муфты. Помимо этого, CVTCU 23 выводит команду для того, чтобы управлять диаметрами намотки ремня первичного шкива 6a и вторичного шкива 6b, в соответствующие пропорциональные соленоиды 15d, 15e, на основе целевого передаточного отношения. BCU 25 выводит команду для того, чтобы управлять фрикционным тормозным крутящим моментом, который формируется посредством дискового тормоза, предоставленного каждому колесу, в модуль 26 управления гидравлическим давлением (HU), на основе целевого темпа замедления. Дополнительно, когда целевой темп замедления не может достигаться посредством только рекуперативного тормозного крутящего момента во время рекуперации электромотора-генератора 3, BCU 25 выводит команду, чтобы компенсировать недостаток с помощью фрикционного тормозного крутящего момента, в HU 26 (рекуперативное совместное управление). HU 26 подает тормозную жидкость в гидравлический суппорт каждого дискового тормоза на основе команды из BCU 25.
Управление прекращением холостого хода
Когда находится в области чрезвычайно низких скоростей транспортного средства, и величина открытия позиции акселератора равна нулю, когда выбран EV-режим движения, HCM 20 выполняет управление холостым ходом электромотора, которое инструктирует электромотору-генератору 3 формировать крутящий момент, соответствующий крутящему моменту при медленном движении. При управлении холостым ходом электромотора, целевая частота вращения электромотора задается равной заданной частоте вращения на холостом ходу электромотора (например, 600 об/мин), и целевая предельная нагрузка по зацеплению второй муфты задается так, чтобы соответствовать крутящему моменту при медленном движении (например, 40 Нм). Крутящий момент, соответствующий крутящему моменту при медленном движении, может увеличиваться, когда скорость транспортного средства уменьшается. Кроме того, когда устанавливается условие разрешения прекращения холостого хода во время управления холостым ходом электромотора, HCM 20 определяет, что был сделан запрос остановки для электромотора-генератора 3, устанавливает целевую предельную нагрузку по зацеплению второй муфты в ноль и выполняет управление прекращением холостого хода, чтобы останавливать электромотор-генератор 3. Когда условие отмены прекращения холостого хода устанавливается во время выполнения управления прекращением холостого хода, HCM 20 повторно запускает электромотор-генератор 3.
Условие для разрешения прекращения холостого хода должно выполняться, например, когда удовлетворяются все следующие четыре условия.
1. Выбирается D-диапазон
2. Состояние остановленного транспортного средства (скорость транспортного средства равна нулю) продолжается в течение заданного периода времени
3. Давление тормозной жидкости равно или больше заданного давления
4. SOC аккумулятора равно или больше заданной величины
С другой стороны, условие отмены прекращения холостого хода должно выполняться, например, когда удовлетворяются все последующие условия 5-7, и удовлетворяется, по меньшей мере, одно из условий 8-10.
5. Выбирается D-диапазон
6. Транспортное средство находится в остановленном состоянии
7. Во время прекращения холостого хода
8. Величина открытия позиции акселератора не равна нулю
9. Давление тормозной жидкости меньше заданного давления
10. SOC аккумулятора меньше заданной величины
Исключение люфта второй муфты
Поскольку электромотор-генератор 3 останавливается во время прекращения холостого хода, основной механический масляный насос 11 больше не создает гидравлическое давление, и подача давления гидравлического масла ко второй муфте 5 прекращается. Когда давление гидравлического масла снимается со второй муфты 5, задержка реакции зацепления второй муфты 5 будет длительной во время следующего запуска. Вторая муфта 5 формирует предельную нагрузку по зацеплению посредством диска муфты сцепления, прижимаемого посредством поршня. Возвратная пружина предоставляется относительно поршня с точки зрения снижения тормозящего крутящего момента и, если поданное гидравлическое давление во вторую муфту 5 чрезмерно уменьшается, поршень возвращается посредством возвратной пружины. Как результат, если поршень и диск муфты сцепления отделяются друг от друга, даже если подача гидравлического давления повторно начинается, предельная нагрузка по зацеплению не формируется во второй муфте 5 пока поршень не начнет свой ход и не войдет в контакт с диском муфты сцепления (пока зазор хода не будет устранен); следовательно, запаздывание по времени для старта увеличивается.
Следовательно, когда устанавливается условие начала прекращения холостого хода, HCM 20 подает питание к переключающему клапану 17 и приводит во вращение электромотор 16a с предписанной частотой вращения, чтобы, тем самым, исключать люфт второй муфты 5, и выполняет процесс остановки электромотора, чтобы останавливать электромотор-генератор 3 после завершения исключения люфта. Посредством исключения люфта второй муфты 5 во время прекращения холостого хода представляется возможным сдерживать задержку реакции зацепления второй муфты 5 во время следующего трогания с места и улучшать реакцию ускорения.
Процесс остановки электромотора
Фиг. 2 является блок-схемой последовательности операций, иллюстрирующей последовательность операций процесса остановки электромотора посредством HCM 20 в первом варианте осуществления.
На этапе S1 определяется, было или нет установлено условие начала прекращения холостого хода. В случае "ДА" процесс переходит к этапу S2, а если "НЕТ", текущее управление заканчивается.
На этапе S2 вспомогательный электрический масляный насос 16 приводится в действие, и люфт второй муфты 5 исключается.
На этапе S3 определяется, было или нет завершено исключение люфта второй муфты 5. В случае "ДА" процесс переходит к этапу S4, а если "НЕТ", процесс возвращается к этапу S2. На этом этапе, когда частота вращения электромотора 16a достигает конкретной частоты вращения, определяется, что исключение люфта было завершено.
На этапе S4 начинается управление частотой вращения электромотора-генератора 3. Целевая частота вращения электромотора должна быть заданной частотой вращения. Заданная частота вращения является частотой вращения, при которой представляется возможным гарантировать состояние проскальзывания второй муфты 5, и должна составлять, например, 300 об/мин. В управлении частотой вращения расчетное командное значение крутящего момента, которое исключает расхождение между целевой частотой вращения электромотора и фактической частотой вращения электромотора, вычисляется, и командный ток, соответствующий вычисленному командному значению крутящего момента, выводится к электромотору-генератору 3.
На этапе S5 определяется, действительно или нет частота вращения электромотора равна или меньше заданной частоты вращения. В случае "ДА" процесс переходит к этапу S6, а если "НЕТ", процесс возвращается к этапу S4.
На этапе S6 частота вращения электромотора поддерживается на заданной частоте вращения.
На этапе S7 определяется, продолжается или нет состояние, в котором частота вращения электромотора поддерживается на заданной частоте вращения, в течение заданного времени T. В случае "ДА" процесс переходит к этапу S8, а если "НЕТ", процесс возвращается к этапу S6. Заданное время T должно быть временем, в которое прогнозируется, что фактический крутящий момент электромотора (созданный крутящий момент) будет уравновешен крутящим моментом нагрузки электромотора, после того как поддержание частоты вращения электромотора началось. Крутящий момент нагрузки электромотора является моментом вращения, который действует как нагрузка на выходной вал 3a электромотора для электромотора-генератора 3. Заданное время T получается заблаговременно экспериментальным путем.
На этапе S8 крутящий момент мотора ограничивается во время продолжения управления частотой вращения, чтобы уменьшать частоту вращения электромотора. Целевая частота вращения электромотора поддерживается на заданной частоте вращения (300 об/мин). На этом этапе командное значение крутящего момента для управления частотой вращения и предыдущее командное значение крутящего момента/заданное значение сравниваются, и меньшее значение выбирается в качестве окончательного командного значения крутящего момента.
На этапе S9 определяется, равна или нет нулю частота вращения электромотора. В случае "ДА" процесс переходит к этапу S10, а если "НЕТ", процесс возвращается к этапу S8.
На этапе S10 командное значение крутящего момента задается в ноль, и электромотор-генератор 3 останавливается.
Первый сравнительный пример
Поскольку целью прекращения холостого хода является улучшение характеристики расхода топлива, предпочтительно осуществлять переход в состояние прекращения холостого хода, в котором электромотор-генератор 3 останавливается, как можно быстрее, после того как сделан запрос остановки для электромотора-генератора 3. Например, частота вращения электромотора может быть уменьшена на ранней стадии с помощью управления частотой вращения.
Фиг. 3 является временной диаграммой случая, в котором вращение электромотора-генератора 3 останавливается посредством только управления частотой вращения во время процесса остановки электромотора, в качестве сравнительного примера первого варианта осуществления.
Во время t1, поскольку исключение люфта второй муфты 5 было завершено, начинается управление частотой вращения, посредством которого частота вращения электромотора уменьшается к нулю. Если электромотор-генератор 3 замедляется с постоянным ускорением вращения, крутящий момент электромотора становится значением, которое получается посредством вычитания постоянного значения, соответствующего инерционному моменту, из крутящего момента нагрузки электромотора.
Во время t2 дифференциальное вращение между вводом и выводом второй муфты 5 становится нулевым. В это время, сопровождая переключение из состояния проскальзывания, в котором существует дифференциальное вращение между вводом и выводом второй муфты 5, в состояние блокировки, в котором дифференциальное вращение равно нулю, G (продольное ускорение) транспортного средства значительно изменяется. Причины для этого будут описаны ниже. Вторая муфта 5 подвергается исключению люфта, так что предельная нагрузка по зацеплению становится нулевой. Однако может присутствовать отклонение в предельной нагрузке по зацеплению второй муфты 5, вызванное индивидуальными различиями, очень долговременными изменениями, температурой масла и т.п. Если существует большое неотрицательное отклонение, вторая муфта 5 будет иметь предельную нагрузку по зацеплению. С другой стороны, когда вторая муфта 5 переключается из состояния проскальзывания в заблокированное состояние, коэффициент трения между скользящими соприкасающимися элементами, которые определяют предельную нагрузку по зацеплению второй муфты 5, переключается с коэффициента кинетического трения на коэффициент статического трения. В целом, поскольку коэффициент кинетического трения < коэффициента статического трения, предельная нагрузка по зацеплению второй муфты 5 увеличивается ступенчатым образом при переключении из состояния проскальзывания в состояние блокировки. Следовательно, когда вторая муфта 5 переключается из состояния проскальзывания в состояние блокировки, различие крутящего момента, который передается приводному валу 9, увеличивается, когда скорость изменения дифференциального вращения второй муфты 5 (градиент уменьшения частоты вращения электромотора) увеличивается, что выглядит как толчок транспортного средства.
Как описано выше, при управлении частотой вращения, тогда как время, чтобы уменьшать частоту вращения электромотора, может управляться, различие крутящего момента, когда частота вращения электромотора становится нулевой, не может управляться.
Второй сравнительный пример
Фиг. 4 является временной диаграммой случая, в котором вращение электромотора-генератора 3 останавливается посредством только управления крутящим моментом во время процесса остановки электромотора, в качестве сравнительного примера первого варианта осуществления.
Во время t1, поскольку исключение люфта второй муфты 5 было завершено, начинается управление крутящим моментом. В управлении крутящим моментом крутящий момент электромотора временно значительно уменьшается, а затем постепенно увеличивается, так что крутящий момент электромотора достигает крутящего момента нагрузки электромотора. Частота вращения электромотора, таким образом, постепенно уменьшается.
Во время t2 дифференциальное вращение между вводом и выводом второй муфты 5 становится нулевым. В это время, поскольку скорость изменения дифференциального вращения второй муфты 5 является низкой, представляется возможным делать различие крутящего момента небольшим и уменьшать толчок транспортного средства.
Как описано выше, в управлении крутящим моментом, тогда как различие крутящего момента, когда крутящий момент электромотора становится нулевым, может управляться, время, чтобы уменьшать частоту вращения электромотора, не может управляться. Для того, чтобы постепенно уменьшать частоту вращения электромотора, необходимо ожидать, пока крутящий момент электромотора и крутящий момент нагрузки электромотора не станут уравновешенными, так что существует длительный промежуток времени между временем, когда запрос остановки электромотора-генератора принимается, и временем, когда электромотор-генератор останавливается.
Обеспечение сокращения периода ожидания и уменьшения толчка
Фиг. 5 является временной диаграммой, иллюстрирующей действие ограничения крутящего момента первого варианта осуществления.
Во время t1, поскольку исключение люфта второй муфты было завершено, начинается управление частотой вращения, посредством которого частота вращения электромотора уменьшается к заданной частоте вращения (300 об/мин). Если состояние проскальзывания второй муфты 5 может поддерживаться, различие крутящего момента не создается, даже если градиент уменьшения частоты вращения электромотора увеличивается. Следовательно, частота вращения электромотора может быть уменьшена до заданной частоты вращения на ранней стадии посредством управления частотой вращения.
Во время t2, поскольку дифференциальное вращение между вводом и выводом второй муфты 5 (частота вращения электромотора) достигло заданной частоты вращения, частота вращения электромотора поддерживается постоянной в течение заданного времени T. В это время, тогда как крутящий момент электромотора увеличивается до крутящего момента нагрузки электромотора вследствие того, что крутящий момент инерции становится нулевым, поскольку вторая муфта 5 находится в состоянии проскальзывания, изменение крутящего момента может быть поглощено посредством дифференциального вращения.
Во время t3, поскольку заданное время T прошло со времени t2, начинается ограничение крутящего момента. В это время, поскольку целевая частота вращения электромотора поддерживается на заданной частоте вращения, целевая частота вращения электромотора всегда имеет большее значение, чем фактическая частота вращения электромотора. Т.е., поскольку командное значение крутящего момента, которое получается из расхождения между целевой частотой вращения электромотора и фактической частотой вращения электромотора, всегда имеет большее значение, чем предыдущее командное значение крутящего момента/заданное значение, командное значение крутящего момента/заданное значение выбирается в качестве окончательного командного значения крутящего момента. В результате, представляется возможным постепенно уменьшать крутящий момент электромотора, в то время как крутящий момент электромотора поддерживается в желаемом верхнем предельном значении, в то же время устойчиво уменьшая частоту вращения электромотора.
Во время t4 дифференциальное вращение между вводом и выводом второй муфты 5 становится нулевым. В это время, поскольку скорость изменения дифференциального вращения второй муфты 5 является низкой, представляется возможным делать различие крутящего момента небольшим и уменьшать толчок транспортного средства. Дополнительно, поскольку различие между крутящим моментом электромотора и крутящим моментом нагрузки электромотора является небольшим, представляется возможным предотвращать увеличение различия крутящего момента, поскольку только это является предметом устранения инерционного момента.
Когда частота вращения электромотора становится нулевой, электромотор-генератор 3 останавливается.
Следующие результаты проявляются в первом варианте осуществления.
(1) Способ управления транспортным средством, содержащим вторую муфту 5, выполненную с возможностью переключения между соединением и разъединением между электромотором-генератором 3 и передними колесами 10, основной механический масляный насос 11, который подает давление гидравлического масла ко второй муфте 5, и вспомогательный электрический масляный насос 16, приводимый в действие посредством электромотора 16a, чтобы подавать давление гидравлического масла ко второй муфте 5, при этом вторая муфта 5 поддерживается разъединенной, с устраненным зазором хода, в то время как транспортное средство остановлено,
уменьшения частоты вращения электромотора с помощью заданной частоты вращения в качестве целевой частоты вращения электромотора в ответ на запрос остановки электромотора-генератора 3 при определении, что частота вращения электромотора для электромотора-генератора 3 больше заданной частоты вращения (300 об/мин), и когда частота вращения электромотора достигла заданной частоты вращения, уменьшения частоты вращения электромотора к нулю, в то же время ограничивая крутящий момент электромотора-генератора 3.
Следовательно, представляется возможным улучшать эффективность использования топлива электромотором-генератором 3 за счет остановки электромотора-генератора 3, когда транспортное средство остановлено. Кроме того, относительно того, что основной механический масляный насос 11 не создает гидравлическое давление вследствие остановки электромотора-генератора 3, поскольку устранение люфта второй муфты 5 выполняется посредством вспомогательного электрического масляного насоса 16, представляется возможным пресекать задержку реакции зацепления второй муфты 5 во время следующего запуска. Кроме того, при остановке электромотора-генератора 3, поскольку частота вращения электромотора уменьшается на ранней стадии посредством управления частотой вращения в состоянии, в котором дифференциальное вращение между вводом и выводом второй муфты 5 является большим, и крутящий момент электромотора ограничивается, когда дифференциальное вращение между вводом и выводом второй муфты 5 становится небольшим, представляется возможным добиваться как сокращения периода ожидания, пока электромотор-генератор 3 останавливается, так и уменьшения толчка транспортного средства.
(2) Когда частота вращения электромотора достигает заданной частоты вращения, частота вращения электромотора поддерживается на заданной частоте вращения, пока не пройдет заданное время T, после которого начинается ограничение крутящего момента электромотора-генератора 3.
Следовательно, когда вторая муфта 5 переключается из состояния проскальзывания в состояние блокировки, представляется возможным предотвращать увеличение различия крутящего момента, поскольку это сопровождается устранением инерционного момента, и дополнительно уменьшать толчок транспортного средства.
(3) Целевая частота вращения электромотора при ограничении крутящего момента электромотора-генератора 3 задается в заданную частоту вращения.
Следовательно, представляется возможным устойчиво уменьшать частоту вращения электромотора без возникновения перерегулирования управления или т.п.
(4) Изобретение снабжается второй муфтой 5, выполненной с возможностью переключения между соединением и разъединением между электромотором-генератором 3 и передними колесами 10, основным механическим масляным насосом 11, выполненным с возможностью приложения давления гидравлического масла ко второй муфте 5, и вспомогательным электрическим масляным насосом 16, приводимым в действие посредством электромотора 16a, чтобы подавать давление гидравлического масла ко второй муфте 5, и HCM 20, который поддерживает вторую муфту 5 разъединенной с устраненным зазором хода, в то время как транспортное средство остановлено, который уменьшает частоту вращения электромотора с помощью заданной частоты вращения в качестве целевой частоты вращения электромотора в ответ на запрос остановки электромотора-генератора 3, если частота вращения электромотора для электромотора-генератора 3 больше заданной частоты вращения (300 об/мин), и который уменьшает частоту вращения электромотора к нулю, когда частота вращения электромотора достигла заданной частоты вращения, в то же время ограничивая крутящий момент электромотора-генератора 3.
Следовательно, представляется возможным улучшать эффективность использования топлива электромотором-генератором 3 за счет остановки электромотора-генератора 3, когда транспортное средство остановлено. Кроме того, относительно того, что основной механический масляный насос 11 не создает гидравлическое давление вследствие остановки электромотора-генератора 3, поскольку устранение люфта второй муфты 5 выполняется посредством вспомогательного электрического масляного насоса 16, представляется возможным пресекать задержку реакции зацепления второй муфты 5 во время следующего запуска. Кроме того, при остановке электромотора-генератора 3, поскольку частота вращения электромотора уменьшается на ранней стадии посредством управления частотой вращения в состоянии, в котором дифференциальное вращение между вводом и выводом второй муфты 5 является большим, и крутящий момент электромотора ограничивается, когда дифференциальное вращение между вводом и выводом второй муфты 5 становится небольшим, представляется возможным добиваться как сокращения периода ожидания, пока электромотор-генератор 3 останавливается, так и уменьшения толчка транспортного средства.
Другие варианты осуществления
Предпочтительный вариант осуществления настоящего изобретения был описан выше на основе вариантов осуществления, но конкретные конфигурации настоящего изобретения не ограничиваются вариантами осуществления, и изменения в замысле, выполненные без отступления от рамок изобретения, также включены в настоящее изобретение.
Например настоящее изобретение может быть применено к электрически приводимому в движение транспортному средству, которое имеет только электромотор-генератор в качестве источника привода.
Устройство управления транспортным средством содержит фрикционную муфту (4), масляный насос (11), электрический масляный насос (16), блок управления (20). Блок управления (20) удерживает фрикционную муфту (4) разъединенной, с устраненным зазором хода, когда транспортное средство остановлено. Блок управления (20) уменьшает частоту вращения электромотора (3) с помощью заданной частоты вращения в качестве целевой частоты вращения электромотора (3), когда выдается запрос остановки электромотора-генератора (3), если частота вращения электромотора (3) для электромотора-генератора (3) превышает заданную частоту вращения. Когда частота вращения электромотора (3) достигла заданной частоты вращения, уменьшают частоту вращения электромотора (3) до нуля, в то же время ограничивая крутящий момент электромотора-генератора (3). Предложен также способ управления транспортным средством. Достигается улучшение эффективности использования топлива электромотором-генератором. 2 н. и 2 з.п. ф-лы, 5 ил.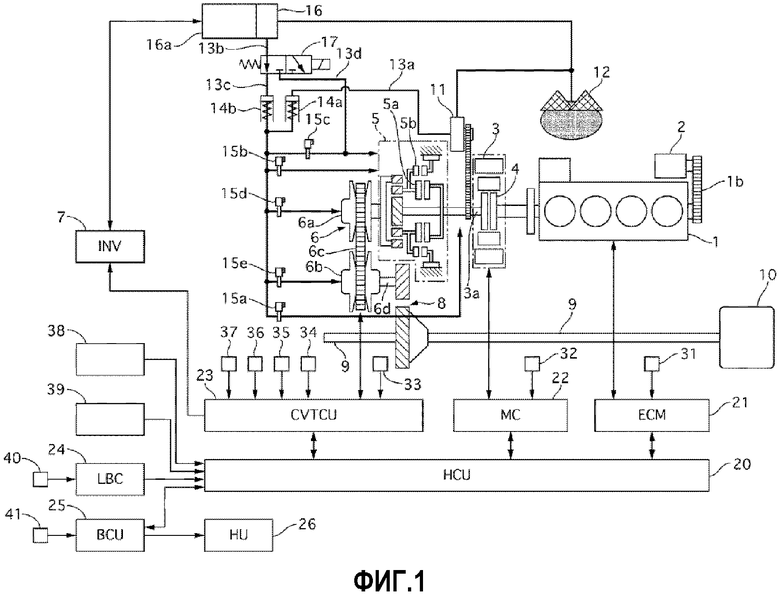
1. Способ управления транспортным средством, содержащим
фрикционную муфту, выполненную с возможностью переключения между соединением и разъединением между электромотором-генератором и ведущим колесом, масляный насос, который подает давление гидравлического масла к фрикционной муфте, и электрический масляный насос, приводимый в действие электромотором, для подачи давления гидравлического масла к фрикционной муфте, при этом способ включает этапы, на которых:
поддерживают фрикционную муфту разъединенной с устраненным зазором хода во время остановки транспортного средства,
уменьшают частоту вращения электромотора с помощью заданной частоты вращения в качестве целевой частоты вращения электромотора в ответ на запрос остановки электромотора-генератора при определении превышения частотой вращения электромотора для электромотора-генератора заданной частоты вращения, и,
когда частота вращения электромотора достигла заданной частоты вращения, уменьшают частоту вращения электромотора до нуля, в то же время ограничивая крутящий момент электромотора-генератора.
2. Способ управления транспортным средством по п. 1, при котором, когда частота вращения электромотора достигает заданной частоты вращения, поддерживают частоту вращения электромотора на заданной частоте вращения, пока не пройдет заданное время, после чего начинается ограничение крутящего момента электромотора-генератора.
3. Способ управления транспортным средством по п. 1 или 2, при котором целевая частота вращения электромотора при ограничении крутящего момента электромотора-генератора задается в заданную частоту вращения.
4. Устройство управления транспортным средством, содержащее:
фрикционную муфту, выполненную с возможностью переключения между соединением и разъединением между электромотором-генератором и ведущим колесом,
масляный насос, который подает давление гидравлического масла к фрикционной муфте,
электрический масляный насос, который приводится в действие посредством электромотора и подает давление гидравлического масла к фрикционной муфте, и
блок управления, который удерживает фрикционную муфту разъединенной, с устраненным зазором хода, когда транспортное средство остановлено, уменьшает частоту вращения электромотора с помощью заданной частоты вращения в качестве целевой частоты вращения электромотора, когда выдается запрос остановки электромотора-генератора, если частота вращения электромотора для электромотора-генератора превышает заданную частоту вращения, и, когда частота вращения электромотора достигла заданной частоты вращения, уменьшает частоту вращения электромотора до нуля, в то же время ограничивая крутящий момент электромотора-генератора.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

