Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления в отказоустойчивом режиме для гибридных транспортных средств.
Уровень техники
[0002] Обычно, в транспортном средстве, имеющем двигатель в качестве источника приведения в движение, фрикционный элемент предоставляется на валу привода, и рабочее давление, которое подается в этот фрикционный элемент, управляется для того, чтобы переключаться между зацеплением и расцеплением фрикционного элемента. Требуемое состояние зацепления, соответствующее состоянию вождения, в силу этого реализуется во фрикционном элементе.
Помимо этого, некоторые транспортные средства, содержащие фрикционный элемент, как описано выше, содержат средство для того, чтобы обнаруживать неисправное состояние фрикционного элемента, и это средство обнаружения определяет отказы в активированном состоянии, в которых соединение фрикционного элемента не может прекращаться, и отказы в деактивированном состоянии, в которых зацепление не может выполняться (например, см. патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. Выложенная заявка на патент (Япония) номер Hei 11(1999)-280886
Сущность изобретения
Задача, решаемая изобретением
[0004] Обычно, известно гибридное транспортное средство, в котором первая муфта предоставляется между двигателем и электромотором, и в котором вторая муфта предоставляется между электромотором и трансмиссией. В этом гибридном транспортном средстве, при переключении с EV-режима, в котором движение выполняется посредством движущей силы электромотора, на HEV-режим, в котором движение выполняется посредством движущей силы двигателя и электромотора, первая муфта соединяется при проскальзывании второй муфты, и двигатель проворачивается, чтобы переходить в HEV-режим.
Следовательно, переключение с EV-режима на HEV-режим становится затруднительным в ходе движения в HEV-режиме, необходимо продолжать движение в HEV-режиме в максимально возможной степени, без переключения с EV-режима на HEV-режим.
Тем не менее, поскольку обычное гибридное транспортное средство не выполнено с возможностью продолжать движение в HEV-режиме в таких случаях, транспортное средство переключается на EV-режим, даже если вторая муфта отказывает. Таким образом, поскольку обычное гибридное транспортное средство переключается в EV-режим, даже если вторая муфта отказывает, становится затруднительным впоследствии переключаться обратно на HEV-режим, так что движение ограничено EV-режимом. Следовательно, поскольку расстояние, проезжаемое в режиме оптимального регулирования скорости гибридного транспортного средства, которое ограничено EV-режимом, определяется согласно оставшейся емкости аккумулятора, возникает проблема в том, что расстояние, проезжаемое в режиме оптимального регулирования скорости, становится короче по сравнению с движением в HEV-режиме.
[0005] С учетом проблемы, описанной выше, цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления в отказоустойчивом режиме для гибридных транспортных средств, которое допускает увеличение проезжаемого расстояния транспортного средства в случае отказа в активированном состоянии второй муфты.
Средство достижения цели
[0006] Чтобы реализовывать цель, описанную выше, настоящее изобретение относится к устройству управления в отказоустойчивом режиме для гибридных транспортных средств, содержащему источник мощности, состоящий из двигателя и электромотора, и трансмиссию, предоставленную между электромотором и ведущими колесами. Первая муфта, которая соединяет и разъединяет двигатель и электромотор, предоставляется между этой трансмиссией и двигателем, и вторая муфта, которая соединяет и разъединяет электромотор и трансмиссию, предоставляется между электромотором и трансмиссией. Помимо этого, это устройство управления в отказоустойчивом режиме содержит средство определения отказов муфты, которое обнаруживает отказ в активированном состоянии, в котором соединение второй муфты не может прекращаться, и контроллер, который переключается между HEV-режимом, который использует двигатель и электромотор в качестве источников приведения в движение, и EV-режимом, который использует только электромотор в качестве источника приведения в движение. В настоящем изобретении, контроллер запрещает переход из HEV-режима в EV-режим при обнаружении отказа в активированном состоянии второй муфты в ходе движения в HEV-режиме.
Преимущества изобретения
[0007] В устройстве управления в отказоустойчивом режиме для гибридных транспортных средств настоящего изобретения, в случае отказа в активированном состоянии второй муфты в ходе движения в HEV-режиме, контроллер запрещает переход в EV-режим.
Следовательно, в настоящем изобретении, появляется возможность увеличивать проезжаемое расстояние на величину, с которой двигатель может приводиться в действие с использованием топлива, по сравнению со случаем, в котором переход в EV-режим движения разрешается в случае отказа в активированном состоянии второй муфты.
Краткое описание чертежей
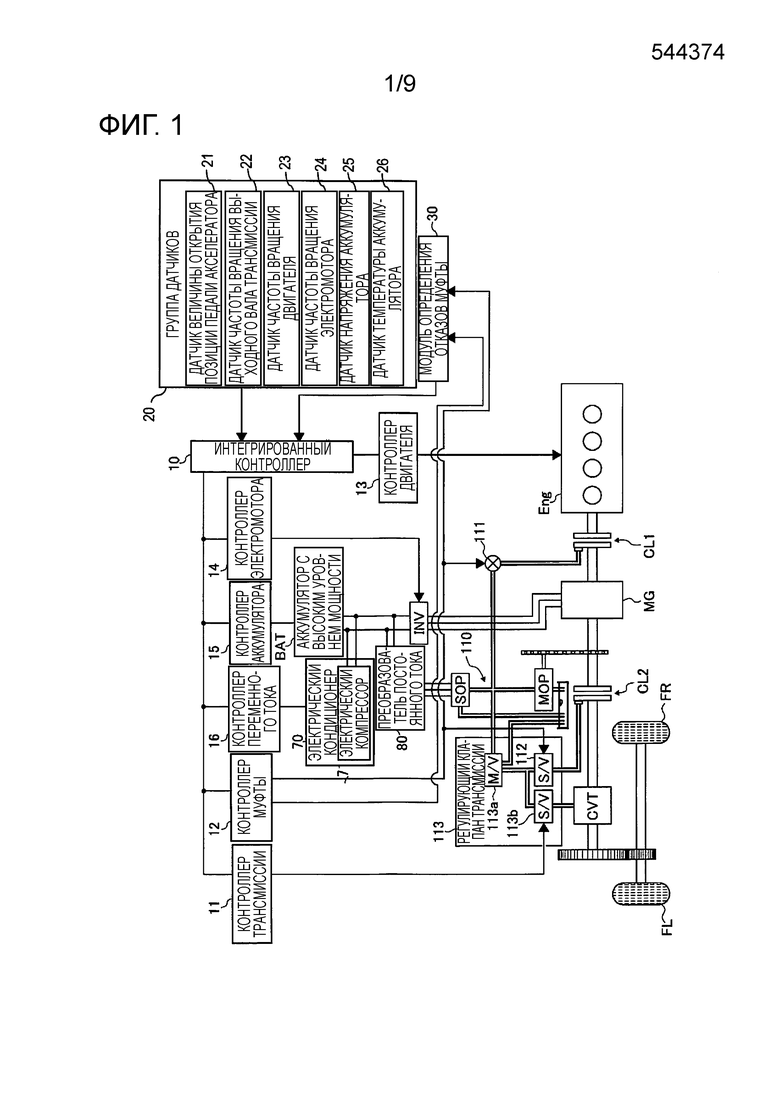
[0008] Фиг. 1 является общим системным видом, схематично иллюстрирующим общую конфигурацию гибридного транспортного средства, содержащего устройство управления в отказоустойчивом режиме согласно первому варианту осуществления.
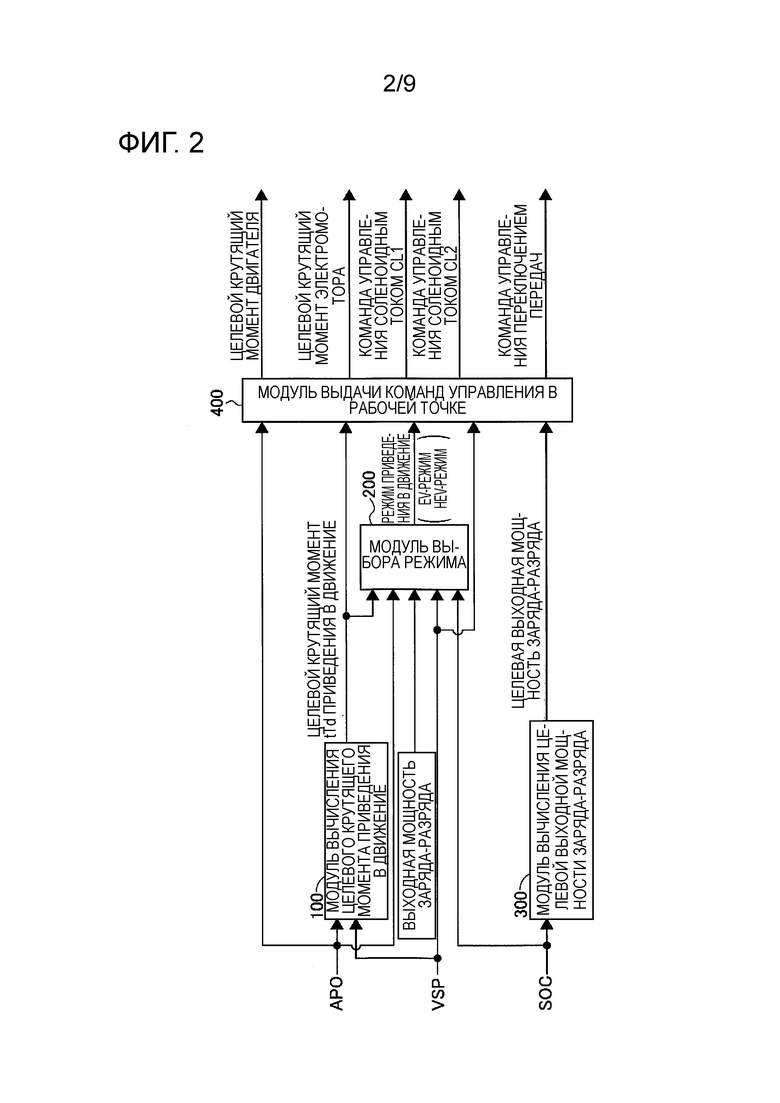
Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию интегрированного контроллера устройства управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления.
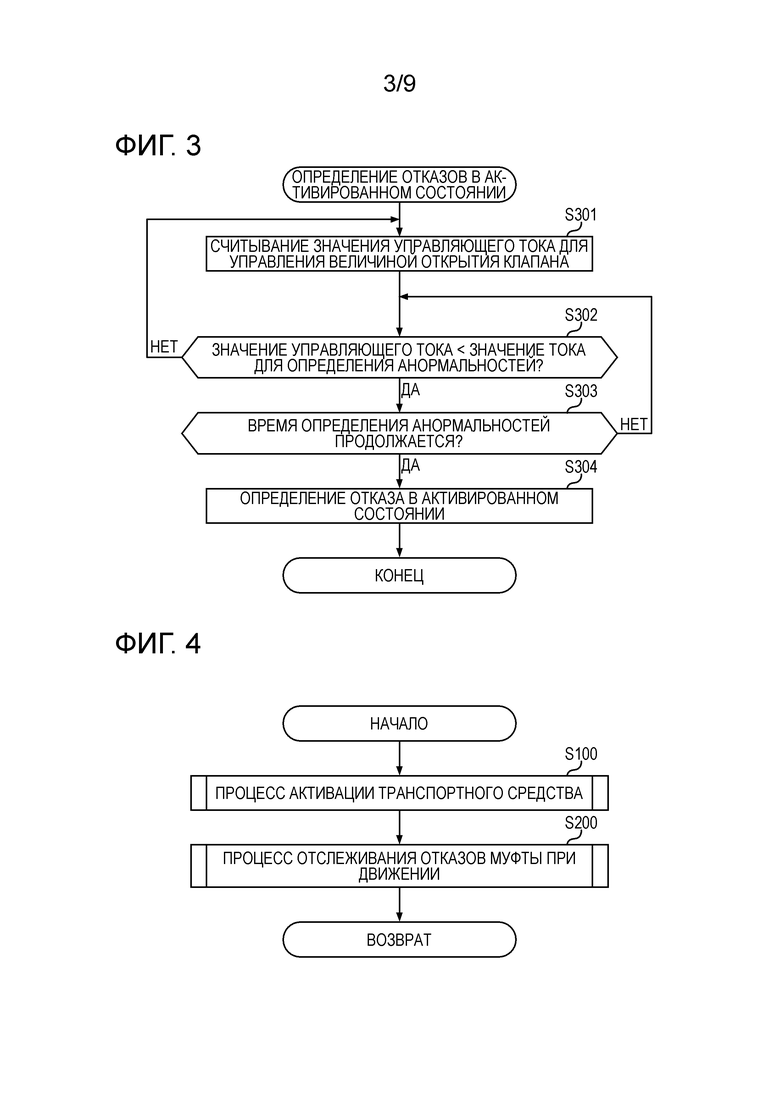
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей этапы процесса определения отказов в активированном состоянии модуля определения отказов муфты в устройстве управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления.
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей этапы основного процесса управления в отказоустойчивом режиме, который выполняется посредством интегрированного контроллера в устройстве управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления.
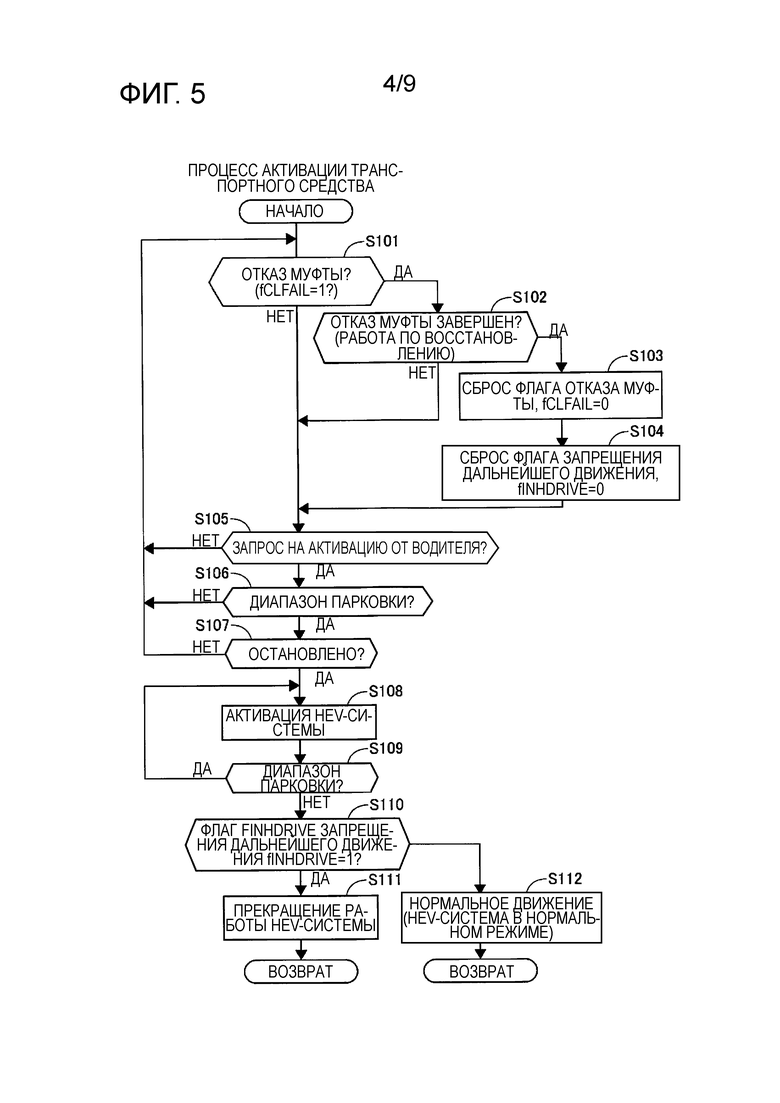
Фиг. 5 является блок-схемой последовательности операций способа, иллюстрирующей этапы процесса активации транспортного средства, который выполняется посредством интегрированного контроллера в устройстве управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления.
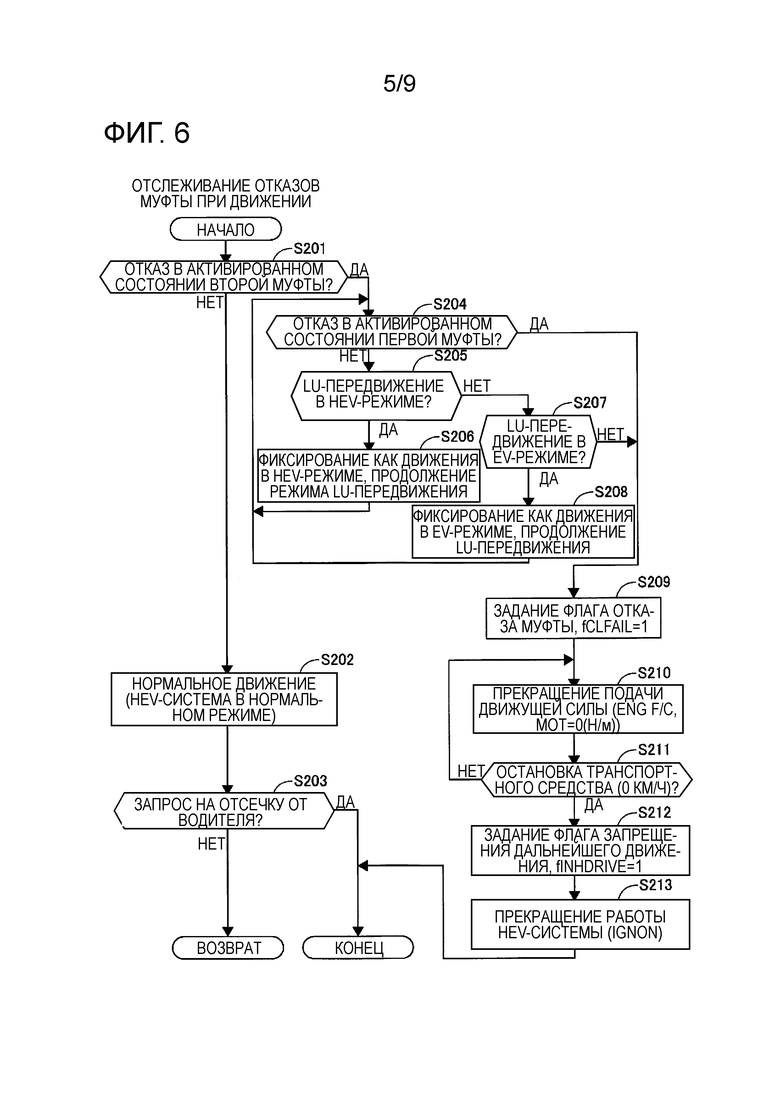
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей этапы процесса отслеживания отказов муфты в ходе движения, который выполняется посредством интегрированного контроллера в устройстве управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления.
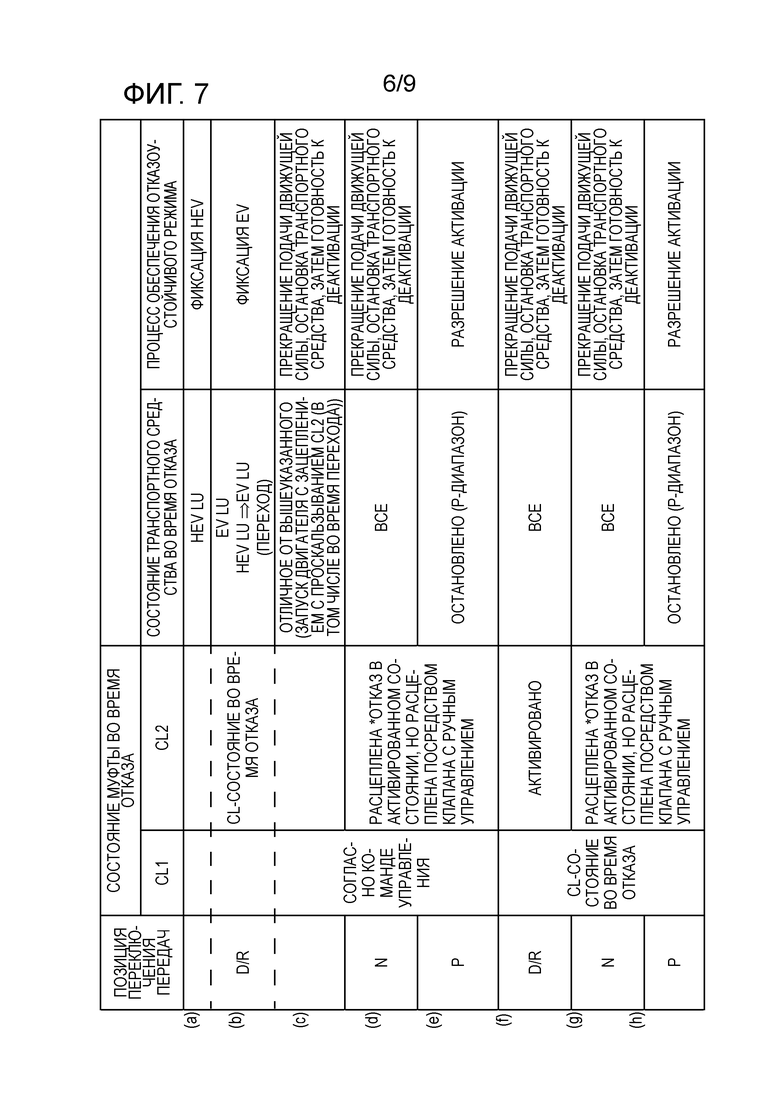
Фиг. 7 является управляющим списком, перечисляющим режимы управления в отказоустойчивом режиме в устройстве управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления.
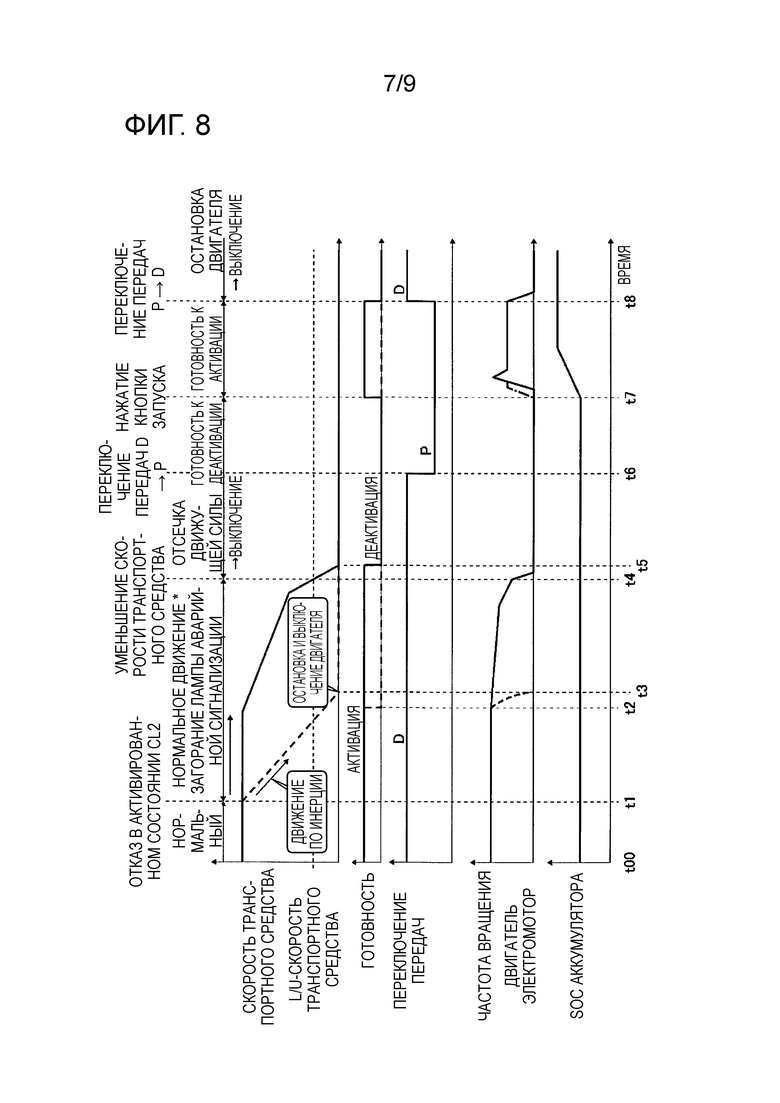
Фиг. 8 является временной диаграммой, иллюстрирующей один пример работы в случае отказа в активированном состоянии второй муфты в устройстве управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления, а также в сравнительном примере.
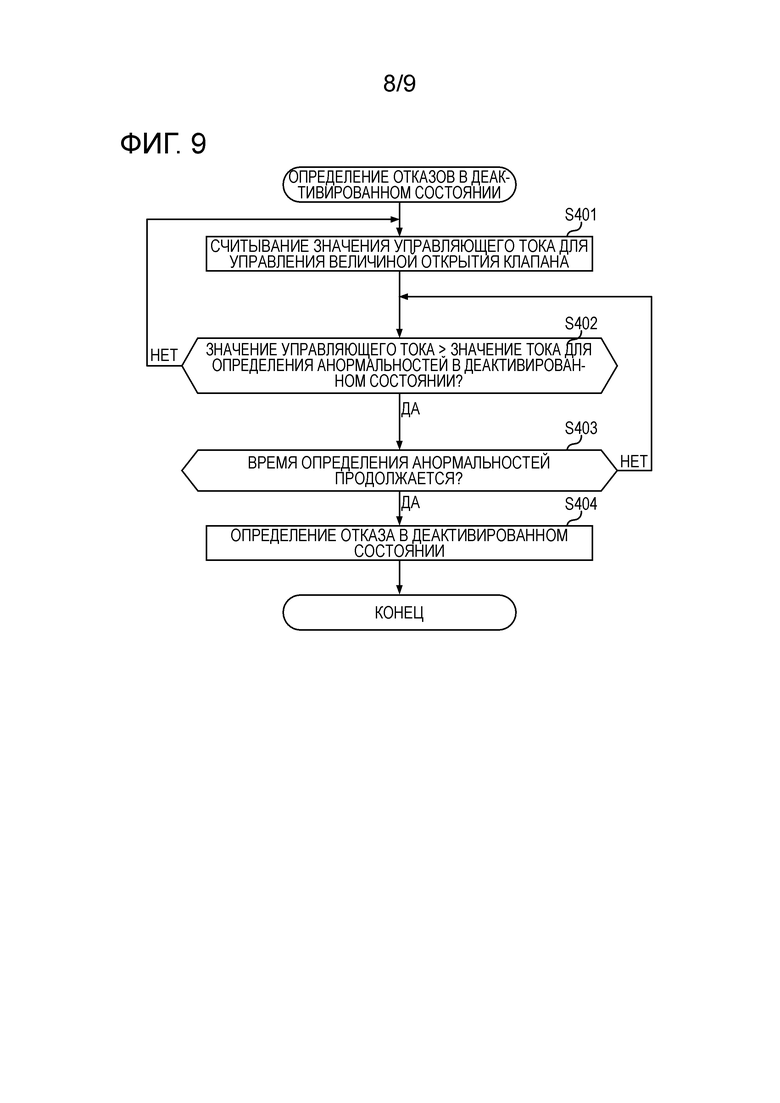
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей этапы процесса определения отказа в деактивированном состоянии модуля определения отказов муфты в устройстве управления в отказоустойчивом режиме для гибридных транспортных средств согласно второму варианту осуществления.
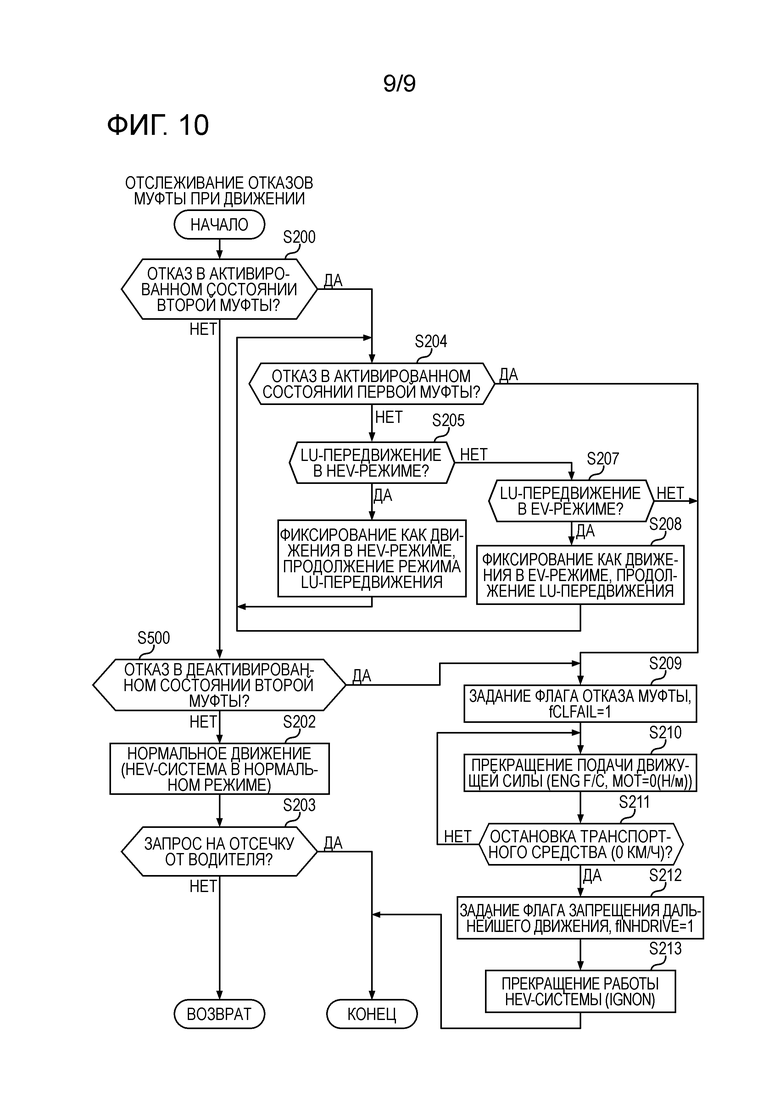
Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей этапы процесса отслеживания отказов муфты в ходе движения, который выполняется посредством интегрированного контроллера в устройстве управления в отказоустойчивом режиме для гибридных транспортных средств согласно второму варианту осуществления.
Подробное описание вариантов осуществления изобретения
[0009] Ниже описывается предпочтительный вариант осуществления для реализации устройства управления в отказоустойчивом режиме для гибридных транспортных средств настоящего изобретения на основе вариантов осуществления, проиллюстрированных на чертежах.
Первый вариант осуществления
Во-первых, описывается конфигурация устройства управления в отказоустойчивом режиме для гибридных транспортных средств первого варианта осуществления.
Устройство управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления применяется к гибридному транспортному средству FF-типа (в дальнейшем называемому просто "гибридным транспортным средством"), имеющему левое и правое передние колеса в качестве ведущих колес и оснащенному ременной бесступенчатой трансмиссией в качестве трансмиссии.
Ниже отдельно описываются "общая конфигурация системы гибридного транспортного средства", "система управления гибридного транспортного средства", "управление посредством интегрированного контроллера", "модуль определения отказов муфты" и "управление в отказоустойчивом режиме", относительно конфигурации устройства управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления.
[0010] Общая конфигурация системы гибридного транспортного средства
Фиг. 1 является общим системным видом гибридного транспортного средства, к которому применяется устройство обнаружения электрических утечек первого варианта осуществления. Ниже описывается общая конфигурация системы гибридного транспортного средства на основе фиг. 1.
[0011] Приводная система гибридного транспортного средства содержит двигатель Eng, первую муфту CL1, электромотор-генератор MG (в дальнейшем называемый "электромотором MG"), вторую муфту CL2 и бесступенчатую трансмиссию CVT.
[0012] Таким образом, приводная система гибридного транспортного средства выполнена так, что можно переключать выходные мощности двигателя Eng и электромотора MG в качестве источников приведения в движение на предварительно определенное передаточное отношение посредством бесступенчатой трансмиссии CVT и передавать их на левое и правое передние колеса FL и FR в качестве ведущих колес.
[0013] Дополнительно, в этой приводной системе гибридного транспортного средства, первая муфта CL1, которая имеет возможность соединять и разъединять трансмиссию с приводом, предоставляется между двигателем Eng и электромотором MG, и вторая муфта CL2, которая имеет возможность соединять и разъединять трансмиссию с приводом, предоставляется между электромотором MG и бесступенчатой трансмиссией CVT. За счет этого можно формировать HEV-режим движения, в котором обе муфты CL1 и CL2 зацепляются, и движение выполняется посредством движущей силы двигателя Eng и электромотора MG. Помимо этого, можно формировать EV-режим, в котором первая муфта CL1 расцепляется, а вторая муфта CL2 зацепляется, и движение выполняется посредством движущей силы только электромотора MG.
[0014] Двигатель Eng допускает сгорание бедной смеси, и крутящий момент двигателя управляется таким образом, чтобы согласовываться со значением команды управления, посредством управления объемом всасываемого воздуха посредством исполнительного устройства дросселя, объемом впрыска топлива посредством инжектора и распределением зажигания посредством исполнительного устройства свечи зажигания.
[0015] Двигатель Eng может запускаться посредством проворачивания с помощью электромотора MG в то время, когда первая муфта CL1 зацепляется с проскальзыванием. Помимо этого, может быть предусмотрена такая конфигурация, в которой начало движения возможно посредством стартерного электромотора, который не показан, в низкотемпературном режиме или высокотемпературном режиме и т.д.
[0016] Первая муфта CL1 представляет собой фрикционный зацепляющий элемент, который размещается между двигателем Eng и электромотором MG. Муфта, которая имеет возможность переключаться между полным зацеплением, полузацеплением и расцеплением с помощью управления длиной хода на основе гидравлического давления первой муфты, которое подается из схемы 110 управления гидравлическим давлением, описанной ниже, используется в качестве упомянутой первой муфты CL1.
[0017] Электромотор MG имеет конструкцию в форме синхронного электромотора переменного тока, которая служит в качестве источника приведения в движение для обеспечения движения и используется для выполнения управления крутящим моментом приведения в движение и управления частотой вращения в ходе начала движения и движении, а также для восстановления кинетической энергии транспортного средства, сформированной посредством управления рекуперативным торможением для аккумулятора BAT высокой емкости в ходе торможения и замедления.
Инвертор INV, который преобразует постоянный ток в трехфазный переменный ток в ходе подачи мощности и преобразует трехфазный переменный ток в постоянный ток в ходе рекуперации, размещается между электромотором MG и аккумулятором BAT высокой емкости.
[0018] Вторая муфта CL2 представляет собой фрикционный зацепляющий элемент, который размещается между электромотором MG и левым и правым передними колесами FL и FR, которые представляют собой ведущие колеса. Эта вторая муфта CL2 также управляется таким образом, что она находится в полном зацеплении - зацеплении с проскальзыванием - расцеплении, с помощью управления длиной хода согласно гидравлическому давлению второй муфты, которое подается из схемы 110 управления гидравлическим давлением.
[0019] Бесступенчатая трансмиссия CVT известна и содержит, хотя не показано, первичный шкив, вторичный шкив и ремень, который наматывается вокруг обоих шкивов. Кроме того, эта бесступенчатая трансмиссия CVT представляет собой трансмиссию, которая реализует передаточное отношение бесступенчатой трансмиссии посредством изменения диаметра намотки ремня, посредством первичного давления и вторичного давления, которые подаются из схемы 110 управления гидравлическим давлением в первичную масляную камеру и вторичную масляную камеру.
[0020] Схема 110 управления гидравлическим давлением содержит, в качестве источников гидравлической мощности, главный масляный насос MOP (механическое приведение в действие) и вспомогательный масляный насос SOP (приведение в движение за счет электромотора).
Главный масляный насос MOP вращательно приводится в действие посредством вала электромотора для электромотора MG (= входного вала трансмиссии). Помимо этого, вспомогательный масляный насос SOP приводится в действие посредством встроенного электромотора и в основном используется в качестве вспомогательного насоса для предоставления смазочного и охлаждающего масла. Вспомогательный масляный насос SOP приводится в действие посредством мощности, предоставляемой из преобразователя 80 постоянного тока, описанного ниже.
[0021] Схема 110 управления гидравлическим давлением содержит соленоидный клапан 111 первой муфты, соленоидный клапан 112 второй муфты и регулирующий клапанный механизм 113 трансмиссии.
Соленоидный клапан 111 первой муфты и соленоидный клапан 112 второй муфты используют давление PL в магистрали, которое формируется посредством регулирования давления на выходе из насоса из источника гидравлической мощности, в качестве исходного давления, и, соответственно, формируют давление первой муфты и давление второй муфты на основе величины хода.
[0022] Регулирующий клапанный механизм 113 трансмиссии содержит клапан 113a с ручным управлением, который может переключаться посредством рычага переключения передач, который не показан, и соленоидный трансмиссионный клапан 113b, который управляется посредством контроллера 11 трансмиссии.
[0023] Позиция клапана 113a с ручным управлением переключается согласно переключению передач с помощью рычага переключения передач на диапазон движения (включающий в себя так называемый диапазон приведения в движение и диапазон заднего хода (D/R)), диапазон нейтрали (N) и диапазон парковки (P). Затем клапан 113a с ручным управлением подает давление PL в магистрали в бесступенчатую трансмиссию CVT в диапазоне движения (D/R) и стравливает давление PL в магистрали в диапазоне нейтрали (N) и диапазоне парковки (P).
[0024] Соленоидный трансмиссионный клапан 113b использует давление PL в магистрали, которое подается из клапана 113a с ручным управлением, в качестве исходного давления для того, чтобы создавать первичное давление и вторичное давление согласно величине хода.
Помимо этого, соленоидный клапан 112 второй муфты, описанный выше, располагается на стороне выпуска клапана 113a с ручным управлением. Таким образом, вторая муфта CL2 также имеет возможность служить в качестве зацепляющего элемента бесступенчатой трансмиссии CVT. Следовательно, гидравлическое давление подается во вторую муфту CL2 в диапазоне движения (D/R) для подачи гидравлического давления из клапана 113a с ручным управлением в бесступенчатую трансмиссию CVT, и гидравлическое давление не подается в диапазоне нейтрали (N) и диапазоне парковки (P).
[0025] Помимо этого, в первом варианте осуществления, два соленоидных клапана 111 и 112 муфты, которые должны использоваться, выполняют операцию зацепления двух муфт CL1 и CL2, если питание не подается, и выполняют операцию расцепления двух муфт CL1 и CL2, если питание подается.
[0026] Таким образом, если питание не подается, золотники (не показаны) двух соленоидных клапанов 111 и 112 муфты позиционируются таким образом, что величина открытия клапана является такой, что давление PL в магистрали подается в сторону операции зацепления двух муфт CL1 и CL2 посредством силы смещения упругого элемента, такого как возвратная пружина.
С другой стороны, во время подачи мощности, два соленоидных клапана 111 и 112 муфты перемещают золотник в направлении увеличения на стороне, чтобы стравливать гидравлическое давление, которое действует на сторону зацепления двух муфт CL1 и CL2, чтобы расцеплять две муфты CL1 и CL2, посредством электромагнитной силы соленоидов.
[0027] Следовательно, когда в соленоидные клапаны 111 и 112 муфты больше не подается питание вследствие отказа, такого как отсоединенные провода, муфты CL1 и CL2 переводятся в состояние отказа в активированном состоянии, которое фиксируется как зацепленное состояние.
С другой стороны, когда в соленоидные клапаны 111 и 112 муфты продолжает подаваться питание вследствие отказа, такого как короткое замыкание электропроводки, муфты CL1 и CL2 удерживаются в состоянии отказа в деактивированном состоянии, которое фиксируется как расцепленное состояние.
[0028] Как описано выше, гибридное транспортное средство содержит "EV-режим", "HEV-режим" и" (HEV) WSC-режим" в качестве основных режимов приведения в движение, и в нем выполнена гибридная приводная система, называемая "системой с одним электромотором и двумя муфтами".
[0029] "EV-режим" представляет собой режим электрического транспортного средства, который имеет только электромотор MG в качестве источника приведения в движение посредством расцепления первой муфты CL1 и зацепления второй муфты CL2.
"HEV-режим" представляет собой режим гибридного транспортного средства, который имеет двигатель Eng и электромотор MG в качестве источников приведения в движение посредством зацепления обеих муфт CL1 и CL2.
"WSC-режим" представляет собой режим зацепления с проскальзыванием CL2, в котором частота вращения электромотора MG управляется в "HEV-режиме", и вторая муфта CL2 зацепляется с проскальзыванием с перегрузочной способностью по крутящему моменту зацепления, соответствующей требуемой движущей силе. Этот "WSC-режим" выбирается, чтобы поглощать разность частот вращения между левым и правым передними колесами FL и FR и двигателем Eng, который вращается с частотой вращения, большей или равной частоты вращения на холостом ходу двигателя, в областях от остановки до начала движения или областях от низкой скорости до остановки, при нахождении в "HEV-режиме" посредством зацепления с проскальзыванием CL2. Причина, по которой требуется "WSC-режим", заключается в том, что приводная система не имеет стыкового узла поглощения разности частот вращения, такого как преобразователь крутящего момента.
[0030] Система управления гибридным транспортным средством
Далее описывается система управления гибридным транспортным средством.
Система управления гибридного транспортного средства содержит инвертор INV, аккумулятор BAT высокой емкости, интегрированный контроллер 10, контроллер 11 трансмиссии, контроллер 12 муфты, контроллер 13 двигателя, контроллер 14 электромотора, контроллер 15 аккумулятора и контроллер 16 переменного тока.
[0031] Система электропитания гибридного транспортного средства содержит аккумулятор BAT высокой емкости в качестве источника мощности электромотора-генератора и 12-вольтовый аккумулятор (не показан) в качестве источника мощности 12-вольтовой нагрузки.
[0032] Инвертор INV выполняет преобразование постоянного тока в переменный и формирует ток приведения в действие для электромотора MG. Инвертор также инвертирует вращение выходного вала электромотора MG посредством инвертирования фазы сформированного тока приведения в действие.
Аккумулятор BAT высокой емкости представляет собой аккумуляторную батарею, которая монтируется в качестве источника мощности электромотора MG, и, например, может представлять собой литий-ионный аккумулятор, который представляет собой модуль гальванических элементов, выполненный из множества гальванических элементов, размещенных в корпусе для аккумулятора. В настоящем варианте осуществления, аккумулятор высокой емкости не ограничен литий-ионным аккумулятором и может представлять собой такое средство накопления мощности, как никель-водородный аккумулятор.
[0033] Инвертор INV преобразует мощность постоянного тока из аккумулятора BAT высокой емкости в трехфазный переменный ток и подает его в электромотор MG во время подачи мощности, при этом электромотор MG приводится в действие посредством разряда аккумулятора BAT высокой емкости, посредством управления подачей мощности/рекуперацией посредством контроллера 14 электромотора. Помимо этого, инвертор преобразует трехфазную мощность переменного тока из электромотора MG в мощность постоянного тока во время рекуперации для заряда аккумулятора BAT высокой емкости посредством мощности, вырабатываемой посредством электромотора MG.
[0034] Интегрированный контроллер 10 выполнен из электронного модуля управления (ECU), который содержит микрокомпьютер, и вычисляет целевой крутящий момент приведения в движение и т.п., из оставшегося состояния заряда аккумулятора (SOC аккумулятора); величины APO открытия позиции педали акселератора; скорости VSP транспортного средства и т.п. После этого, на основе результата вычисления интегрированный контроллер 10 вычисляет значения команд управления для каждого из исполнительных устройств (электромотора MG, двигателя Eng, первой муфты CL1, второй муфты CL2, бесступенчатой трансмиссии CVT), которые передаются в соответствующие контроллеры 11-15.
[0035] SOC аккумулятора вводится из контроллера 15 аккумулятора. Величина APO открытия позиции педали акселератора определяется посредством датчика 21 величины открытия позиции педали акселератора. Скорость VSP транспортного средства является значением, которое синхронизируется с частотой вращения выходного вала трансмиссии и определяется посредством датчика 22 частоты вращения выходного вала трансмиссии.
Помимо этого, этот интегрированный контроллер 10 управляет расходом на выходе главного масляного насоса MOP, расходом на выходе вспомогательного масляного насоса SOP и давлением PL в магистрали.
[0036] Контроллер 11 трансмиссии выполняет управление переключением передач таким образом, чтобы осуществлять команду управления переключением передач из интегрированного контроллера 10. Этот управление переключением передач выполняется посредством управления гидравлическим давлением, которое подается в первичный шкив, и гидравлическом давлением, которое подается во вторичный шкив бесступенчатой трансмиссии CVT, на основе управления регулирующим клапанным механизмом 113 трансмиссии, с использованием давления PL в магистрали, которое подается через схему 110 управления гидравлическим давлением, в качестве исходного давления.
Затем избыточное давление, которое формируется при создании гидравлического давления, которое подается в первичный шкив, и гидравлическое давление, которое подается во вторичный шкив из давления PL в магистрали, используются для того, чтобы помогать охлаждать и смазывать первую муфту CL1 и вторую муфту CL2.
[0037] Контроллер 12 муфты вводит частоту вращения входного вала второй муфты, частоту вращения выходного вала второй муфты, температуру масла муфты и т.п. и выполняет управление первой муфтой и управление второй муфтой таким образом, чтобы реализовывать команду управления первой муфтой и команду управления второй муфтой из интегрированного контроллера 10.
[0038] Это управление первой муфтой выполняется посредством управления гидравлическим давлением, которое подается в первую муфту CL1, на основе управления соленоидным клапаном 111 первой муфты, с использованием давления PL в магистрали, которое подается через схему 110 управления гидравлическим давлением, в качестве исходного давления.
[0039] Помимо этого, управление второй муфтой выполняется посредством управления гидравлическим давлением, которое подается во вторую муфту CL2, на основе управления соленоидным клапаном 112 второй муфты, с использованием давления PL в магистрали, которое подается через схему 110 управления гидравлическим давлением, в качестве исходного давления.
[0040] Затем избыточное давление, которое формируется при создании гидравлического давления, которое подается в первую муфту CL1, и гидравлическое давление, которое подается во вторую муфту CL2 из давления PL в магистрали, передаются для охлаждения и смазки первой муфты CL1 и второй муфты CL2.
[0041] Контроллер 13 двигателя вводит частоту вращения двигателя, которая определяется посредством датчика 23 частоты вращения двигателя, команды управления целевым крутящим моментом двигателя из интегрированного контроллера 10 и т.д. Затем контроллер 13 двигателя выполняет управление запуском, управление впрыском топлива, управление зажиганием, управление в режиме отсечки топлива и т.п., чтобы управлять крутящим моментом двигателя таким образом, чтобы реализовывать значение команды управления целевым крутящим моментом двигателя.
[0042] Контроллер 14 электромотора вводит значения команд управления целевым крутящим моментом электромотора и значения команд управления частотой вращения электромотора из интегрированного контроллера 10, частоту вращения электромотора, которая определяется посредством датчика 24 частоты вращения электромотора, и т.п. Затем контроллер 14 электромотора выполняет такие виды управления, как управление подачей мощности и рекуперативное управление, управление оборотами электромотора в режиме медленного движения и управление оборотами электромотора на холостом ходу для электромотора MG, с тем чтобы реализовывать значение команды управления целевым крутящим моментом электромотора и значение команды управления частотой вращения электромотора.
[0043] Контроллер 15 аккумулятора управляет температурой аккумулятора, SOC аккумулятора, которое представляет собой оставшийся заряд аккумулятора BAT высокой емкости, и т.п. на основе входной информации из датчика 25 напряжения аккумулятора, датчика 26 температуры аккумулятора и т.п. и передает информацию в интегрированный контроллер 10.
[0044] Контроллер 16 переменного тока управляет работой электрического кондиционера 70 на основе определения датчика (не показан), который определяет различные факторы окружающей среды, который связаны с температурой в салоне транспортного средства. Этот электрический кондиционер 70 управляется посредством подачи мощности из аккумулятора BAT высокой емкости таким образом, чтобы регулировать температуру внутри транспортного средства, и электрический компрессор 71, который сжимает хладагент, предоставляется в этом электрическом кондиционере 70. Этот электрический компрессор 71 включает в себя инвертор (не показан), преобразует мощность постоянного тока, которая подается из аккумулятора BAT высокой емкости, в мощность переменного тока и приводится в действие посредством электромотора (не показан). Преобразователь 80 постоянного тока соединяется с аккумулятором BAT высокой емкости параллельно с электрическим кондиционером 70. Преобразователь 80 постоянного тока подает мощность постоянного тока в бортовые электрические устройства, такие как вспомогательный масляный насос SOP, после преобразования напряжения аккумулятора BAT высокой емкости.
[0045] Управление посредством интегрированного контроллера
Ниже кратко описывается управление посредством интегрированного контроллера 10.
Интегрированный контроллер 10 содержит модуль 100 вычисления целевого крутящего момента приведения в движение, модуль 200 выбора режима, модуль 300 вычисления целевой выходной мощности заряда-разряда и модуль 400 выдачи команд управления в рабочей точке, как проиллюстрировано на фиг. 2.
[0046] В модуль 100 вычисления целевого крутящего момента приведения в движение, вводятся величина APO открытия позиции педали акселератора, скорость VSP транспортного средства и т.д., и целевой крутящий момент tTd приведения в движение (целевой полный крутящий момент транспортного средства) вычисляется из карты целевого стационарного крутящего момента (одного примера карты крутящего момента двигателя) и карты вспомогательного крутящего момента (одного примера карты крутящего момента электромотора-генератора).
[0047] Модуль 200 выбора режима вычисляет то, какой режим приведения в движение должен представлять собой целевой режим приведения в движение, т.е. HEV-режим или EV-режим. Задание режима приведения в движение посредством модуля 200 выбора режима, например, может выбираться между EV-режимом и HEV-режимом согласно скорости VSP транспортного средства и величине APO открытия позиции педали акселератора на основе карты выбора режима, которая задается заранее; тем не менее, подробности опускаются.
[0048] Модуль 300 вычисления целевой выходной мощности заряда-разряда увеличивает величину выработки мощности, когда SOC аккумулятора является низким, уменьшает величину выработки мощности, когда SOC аккумулятора является высоким, и вычисляет целевую мощность tP заряда-разряда, с тем чтобы повышать использование усиления электромотора.
[0049] Модуль 400 выдачи команд управления в рабочей точке вычисляет целевые показатели наступления рабочей точки из величины APO открытия позиции педали акселератора, целевого крутящего момента tTd приведения в движение, режима приведения в движение, скорости VSP транспортного средства и целевой мощности заряда-разряда, которые выводятся в качестве значений команд управления. Целевой крутящий момент двигателя, целевой крутящий момент электромотора, целевая перегрузочная способность по крутящему моменту CL2, целевое передаточное отношение, команда управления соленоидным током первой муфты и команда управления соленоидным током второй муфты вычисляются в качестве этих целевых показателей наступления рабочей точки. В настоящем варианте осуществления, модуль выдачи команд управления в рабочей точке интегрально вычисляет целевой крутящий момент двигателя, целевой крутящий момент электромотора, целевую перегрузочную способность по крутящему моменту CL2, целевое передаточное отношение, команду управления соленоидным током первой муфты и команду управления соленоидным током второй муфты; тем не менее, средства для того, чтобы вычислять значения команд управления, могут предоставляться для каждого из означенного.
[0050] Модуль определения отказов муфты
Далее описывается модуль 30 определения отказов муфты, проиллюстрированный на фиг. 1.
Модуль 30 определения отказов муфты определяет присутствие или отсутствие отказа в активированном состоянии каждой из муфт CL1 и CL2, на основе значений управляющего тока в первую муфту CL1 и вторую муфту CL2.
[0051] Этот отказ в активированном состоянии означает состояние, в котором обе муфты CL1 и CL2, соответственно, фиксируются в соединенном состоянии, которое возникает, когда значение управляющего тока соленоидных клапанов 111 и 112 ниже предварительно определенного значения, к примеру, если питание не подается. Таким образом, если значение управляющего тока опускается ниже нормального значения управления, достаточная возбуждающая сила соленоида для того, чтобы перемещать золотник (не показан), не может получаться. Следовательно, золотник (не показан) не может в достаточной степени перемещаться против силы смещения упругого элемента, и величина открытия клапана, который соединяет сторону операции зацепления муфты со стороной давления в магистрали, становится больше или равной предварительно определенной величине, приводя к тому, что подаваемое давление превышает предварительно определенное значение, так что в результате возникает отказ.
[0052] Следовательно, модуль 30 определения отказов муфты вводит значение управляющего тока в каждый соленоидный клапан 111 и 112 и определяет присутствие отказа в активированном состоянии, когда состояние, в котором значение управляющего тока является значением тока для определения анормальностей, которое задается заранее и составляет ниже нормального значения команды управления, продолжается, по меньшей мере, в течение времени определения анормальностей, которое задается заранее.
[0053] Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей этапы процесса определения отказов в активированном состоянии модуля 30 определения отказов муфты. Это определение отказов в активированном состоянии начинается, когда переключатель зажигания, который не показан, включается, и независимо выполняется для каждой из муфт CL1 и CL2.
Во-первых, на этапе S301, считывается значение управляющего тока, которое управляет величиной открытия клапана для каждого из соленоидных клапанов 111 и 112 (состоянием зацепления каждой муфты CL1 и CL2), и этапы переходят к этапу S302.
[0054] На этапе S302, определяется то, меньше или нет значение управляющего тока значения тока для определения анормальностей; если значение управляющего тока меньше значения тока для определения анормальностей, этапы переходят к этапу S303; а если больше значения тока для определения анормальностей, процесс возвращается к этапу S301. Значение тока для определения анормальностей задается равным значению тока, в силу которого величина открытия клапана, который сцепляет сторону давления в магистрали и сторону операции зацепления муфты соленоидных клапанов 111 и 112, становится величиной открытия, которая превышает анормальную величину открытия, которая задается заранее и превышает диапазон величин открытия, который используется при нормальном управлении.
[0055] На этапе S303, к которому переходят этапы, когда значение управляющего тока меньше значения тока для определения анормальностей, определяется то, превышает или нет длительность, в течение которой значение управляющего тока составляет значение тока для определения анормальностей, время определения анормальностей, которое задается заранее. Если длительность превышает время определения анормальностей, этапы переходят к этапу S304, а если длительность не превышает время определения анормальностей, этапы возвращаются к этапу S302. Время определения анормальностей задается равным времени, в которое можно исключать случаи, в которых анормальная величина открытия превышается вследствие перерегулирования в нормальном режиме работы.
Затем отказ в активированном состоянии определяется на этапе S304, на который переходят этапы, когда длительность, в течение которой значение управляющего тока меньше значения тока для определения анормальностей, превышает время определения анормальностей, которое задается заранее. Помимо этого, в первом варианте осуществления, предупреждающий индикатор загорается во время упомянутого определения неисправностей.
[0056] Управление в отказоустойчивом режиме
Ниже описывается управление в отказоустойчивом режиме, соответствующее отказу в активированном состоянии двух муфт CL1 и CL2, которое выполняется посредством интегрированного контроллера 10, на основе блок-схем последовательности операций способа по фиг. 4-6.
Фиг. 4 иллюстрирует основной процесс управления в отказоустойчивом режиме, которое выполняется посредством интегрированного контроллера 10.
[0057] Во-первых, на этапе S100, если выполняется процесс активации транспортного средства, и начинается нормальное движение, описанное ниже, этапы переходят к этапу S200, и выполняется процесс отслеживания отказов муфты в ходе движения.
[0058] Процесс активации транспортного средства начинается посредством переключения переключателя зажигания (не показан) из выключенного состояния во включенное, и нормальное движение разрешается, когда муфта не отказывает; и когда муфта отказывает, выполняется процесс обеспечения отказоустойчивого режима, в котором движение запрещается, но запуск двигателя Eng разрешается.
При процессе отслеживания отказов муфты в ходе движения, присутствие или отсутствие отказа двух муфт CL1 и CL2 определяется в ходе движения, и выполняется процесс обеспечения отказоустойчивого режима, который соответствует присутствию или отсутствию отказа, состоянию отказа и состояния движению.
[0059] Процесс активации транспортного средства и процесс отслеживания отказов муфты в ходе движения описываются ниже, на основе блок-схем последовательности операций способа по фиг. 5 и фиг. 6.
Процесс активации транспортного средства
Во-первых, описывается процесс активации транспортного средства со ссылкой на фиг. 5.
Упомянутый процесс активации транспортного средства выполняется после того, как водитель переключает переключатель зажигания, который не показан, из выключенного состояния во включенное, а затем выполняет операцию включения переключателя стартера, который не показан.
[0060] На этапе S101, определяется то, имеется или нет отказ муфты, согласно тому, задается или нет флаг fCLFAIL отказа муфты (=1); во время отказа муфты, этапы переходят к этапу S102; и когда отсутствует отказ муфты, этапы переходят к этапу S105. Задание этого флага fCLFAIL отказа муфты, который указывает отказ муфты, выполняется посредством обнаружения отказа в активированном состоянии муфт CL1 и CL2 во время процесса отслеживания отказов муфты в ходе движения, описанного ниже, в ходе предыдущего движения, что подробно описывается ниже.
[0061] На этапе S102, к которому переходят этапы во время отказа муфты, определяется то, завершено или нет восстановление после отказа муфты; если восстановление после отказа муфты завершено, этапы переходят к этапу S103, а если восстановление после отказа муфты не завершено, этапы переходят к этапу S105. Упомянутое восстановление после отказа муфты выполняется посредством человеческого труда на заводе и т.п., и когда восстановление завершается, рабочий вводит предварительно определенную информацию, которая указывает завершение восстановления после отказа, в интегрированный контроллер 10.
Затем на этапе S103, к которому переходят этапы, когда восстановление после отказа завершается, флаг fCLFAIL отказа муфты сбрасывается (=0), и этапы переходят к этапу S104.
[0062] Кроме того, на этапе S104, флаг fINHDRIVE запрещения дальнейшего движения сбрасывается (=0). Задание флага fINHDRIVE запрещения дальнейшего движения выполняется при обнаружении отказа муфты во время процесса отслеживания отказов муфты в ходе движения, описанного ниже, в ходе предыдущего движения, что подробно описывается ниже.
[0063] Этапы S105-S108 определяют то, должна или нет HEV-система активироваться, и активацию HEV-системы. При активации HEV-системы, аккумулятор BAT высокой емкости становится допускающим подачу мощности, электромотор MG приводится в действие, чтобы создавать необходимое давление PL в магистрали, и двигатель Eng приводится в действие согласно системным запросам. Примеры системных запросов включают в себя запрос на то, чтобы вырабатывать мощность в ответ на снижение SOC аккумулятора, и запрос на увеличение температуры охлаждающей воды и масла для двигателя.
Во-первых, на этапе S105, определяется то, выдает или нет водитель запрос на активацию; если имеется запрос на активацию, этапы переходят к этапу S106; а если запрос на активацию не выдан, этапы возвращаются к этапу S101. Запрос на активацию может представлять собой либо одну из операции включения переключателя зажигания, который не показан, и операции включения пускового переключателя, который не показан, либо может представлять собой другую операцию.
[0064] На этапе S106, к которому переходят этапы, когда имеется запрос на активацию от водителя, определяется то, находится или нет позиция переключения коробки передач в диапазоне парковки (P); если позиция переключения коробки передач находится в диапазоне парковки (P), этапы переходят к этапу S107; а если позиция переключения коробки передач не находится в диапазоне парковки (P), этапы возвращаются к этапу S101.
[0065] На этапе S107, к которому переходят этапы, когда позиция переключения коробки передач находится в диапазоне парковки (P), определяется то, находится или нет транспортное средство в остановленном состоянии; если транспортное средство находится в остановленном состоянии, этапы переходят к этапу S108; а если транспортное средство не находится в остановленном состоянии, этапы возвращаются к этапу S101. После этого на этапе S108 HEV-система активируется.
[0066] На этапе S109, к которому переходят этапы после того, как HEV-система активируется на этапе S108, определяется то, поддерживается или нет позиция переключения коробки передач в диапазоне парковки (P). После этого, в то время как рычаг переключения передач поддерживается в диапазоне парковки (P), этапы возвращаются к этапу S108, чтобы поддерживать активированное состояние HEV-системы; и когда рычаг переключения передач переключается в позицию, отличную от диапазона парковки (P), и водитель имеет намерение начинать движение, этапы переходят к этапу S110.
[0067] Если рычаг переключения передач находится в диапазоне парковки (P), поскольку тракт подачи гидравлического давления из схемы 110 управления гидравлическим давлением в бесступенчатую трансмиссию CVT и вторую муфту CL2 сцепляется со стороной стравливания, вторая муфта CL2 расцепляется независимо от значения управляющего тока и не должна соединяться.
Помимо этого, поскольку тракт подачи гидравлического давления отличается, первая муфта CL1 может зацепляться во время упомянутой активации HEV-системы.
[0068] На этапе S110, к которому переходят этапы, когда рычаг переключения передач переключается на диапазон, отличный от диапазона парковки (P), и водитель имеет намерение начинать движение, определяется то, задается или нет флаг fINHDRIVE запрещения дальнейшего движения (=1). Затем если флаг fINHDRIVE запрещения дальнейшего движения задается, этапы переходят к этапу S111, и работа HEV-системы прекращается, чтобы переводить транспортное средство в состояние без возможности движения, а если флаг fINHDRIVE запрещения дальнейшего движения не задается (=0), этапы переходят к этапу S112, и нормальное движение выполняется.
[0069] Как описано выше, в процессе активации транспортного средства, если флаг fINHDRIVE запрещения дальнейшего движения задается, когда водитель выполняет операцию активации, активация HEV-системы разрешается только в диапазоне парковки (P). Помимо этого, если флаг fINHDRIVE запрещения дальнейшего движения не задается, нормальное движение разрешается. Флаг fINHDRIVE запрещения дальнейшего движения задается при прекращении работы после обнаружения отказа в активированном состоянии одной или обеих из двух муфт CL1 и CL2 в ходе предыдущего движения.
[0070] Процесс отслеживания отказов муфты в ходе движения
Ниже описывается процесс отслеживания отказов муфты в ходе движения на основе блок-схемы последовательности операций способа по фиг. 6.
В этом процессе отслеживания отказов муфты в ходе движения, отслеживается присутствие или отсутствие отказа в активированном состоянии двух муфт CL1 и CL2, и когда отказ в активированном состоянии возникает, предварительно определенный процесс обеспечения отказоустойчивого режима выполняется согласно состоянию транспортного средства.
[0071] Это процесс отслеживания отказов муфты в ходе движения выполняется от момента времени, в который инициируется нормальное движение посредством процесса активации транспортного средства, описанного выше.
Во-первых, на этапе S201, определяется то, имеется или нет отказ в активированном состоянии второй муфты CL2; когда имеется отказ, этапы переходят к этапу S204, а если отказ в активированном состоянии не возникает, этапы переходят к этапу S202.
На этапе S202, к которому переходят этапы, когда отказ в активированном состоянии не возникает во второй муфте CL2, выполняется нормальное движение. В ходе этого нормального движения, HEV-система выполняет операцию согласно нормальной команде.
Кроме того, на этапе S203, к которому переходят этапы в случае нормального движения, определяется то, имеется или нет запрос на отсечку от водителя; если имеется запрос на отсечку от водителя, процесс отслеживания отказов муфты в ходе движения завершается; а если запрос на отсечку отсутствует, этапы возвращаются к этапу S201, и процесс отслеживания отказов муфты в ходе движения продолжается. Запрос на отсечку определяется как присутствующий посредством операции переключения переключателя зажигания (не показан) из включенного состояния в выключенное.
[0072] На этапе S204, к которому переходят этапы, когда отказ в активированном состоянии возникает во второй муфте CL2 на этапе S201, определяется то, имеется или нет отказ в активированном состоянии первой муфты CL1. Если имеется отказ в активированном состоянии первой муфты CL1, этапы переходят к этапу S209, а если отказ в активированном состоянии отсутствует, этапы переходят к этапу S205.
[0073] Здесь, этапы S201 и S204 также служат для того, чтобы определять отказы источника мощности. Таким образом, как описано выше, определение отказов в активированном состоянии выполняется согласно тому, уменьшено или нет значение управляющего тока для каждого соленоидного клапана 111 и 112 муфты до значения ниже значения тока для определения анормальностей. Следовательно, если значения управляющего тока обоих соленоидных клапанов 111 и 112 муфты уменьшены до значения ниже значения тока для определения анормальностей, и выполняется определение "Да" на обоих этапах S201 и S204, считается, что возникает отказ источника мощности, и этапы переходят к этапу S209.
[0074] Если отсутствует отказ первой муфты CL1 на этапе S204, движение в отказоустойчивом режиме переключается согласно состоянию движения транспортного средства.
Таким образом, на этапе S205, определяется то, представляет собой текущий режим движения или нет HEV-режим, и транспортное средство выполняет LU-передвижение, при котором вторая муфта CL2 переводится в состояние блокировки. Затем если транспортное средство находится в HEV-режиме и выполняет LU-передвижение, этапы переходят к этапу S206; в противном случае этапы переходят к этапу S207.
[0075] На этапе S206, к которому переходят этапы, когда транспортное средство находится в HEV-режиме, и LU-передвижение выполняется на этапе S205, движение фиксируется как HEV-режим, и LU-передвижение продолжается со второй муфтой CL2 в состоянии блокировки, и этапы возвращаются к этапу S204. Движение в HEV-режиме в силу этого может продолжаться.
[0076] На этапе S207, к которому переходят этапы, когда транспортное средство не находится в HEV-режиме, и/или LU-передвижение не выполняется на этапе S205, определяется то, представляет собой текущий режим движения или нет EV-режим, и транспортное средство выполняет LU-передвижение, при котором вторая муфта CL2 переводится в состояние блокировки. Затем если транспортное средство находится в EV-режиме и выполняет LU-передвижение, этапы переходят к этапу S208; в противном случае этапы переходят к этапу S209.
[0077] На этапе S208, к которому переходят этапы, когда транспортное средство находится в EV-режиме, и LU-передвижение выполняется на этапе S207, движение фиксируется как EV-режим, и LU-передвижение продолжается со второй муфтой CL2 в состоянии блокировки, и этапы возвращаются к этапу S204. Соответственно, движение является возможным в то время, пока подача мощности, предоставляемой из аккумулятора BAT высокой емкости, продолжается, в EV-режиме.
[0078] На этапе S209, к которому переходят этапы, когда имеется отказ в активированном состоянии двух муфт CL1 и CL2, или когда вторая муфта CL2 вынуждается проскальзывать без перевода в состояние блокировки, флаг fCLFAIL отказа муфты задается, и этапы переходят к этапу S210.
Определение "Нет" выполняется на этапах S205 и S207, когда вторая муфта CL2 вынуждается проскальзывать; это возникает, например, когда скорость VSP транспортного средства уменьшается, и транспортное средство переключается в WSC-режим при движении в HEV-режиме.
[0079] После этого, прекращается подача движущей силы (прекращается подача выходной мощность двигатели и выходной мощности электромотора) на этапе S210, и этапы переходят к этапу S211.
На этапе S211, определяется то, возникает или нет остановка транспортного средства; этапы возвращаются к этапу S210 до тех пор, пока транспортное средство не будет остановлено, а когда транспортное средство остановлено, этапы переходят к этапу S212.
[0080] На этапе S212, флаг fINHDRIVE запрещения дальнейшего движения задается (=1), и на следующем этапе S213, работа HEV-системы прекращается, и движение с отслеживанием отказов муфты завершается.
[0081] Процесс обеспечения отказоустойчивого режима согласно состоянию транспортного средства и состоянию отказа при выполнении управления в отказоустойчивом режиме, описанного выше, проиллюстрирован в управляющем списке по фиг. 7.
Ниже описывается упомянутый управляющий список в порядке с начала.
(a) Если первая муфта CL1 не отказывает, вторая муфта CL2 находится в состоянии отказа в активированном состоянии, позиция переключения коробки передач находится в диапазоне движения (D/R), и состояние транспортного средства находится в HEV-режиме при нахождении в состоянии блокировки второй муфты, то транспортное средство фиксируется в HEV-режиме. Это выполняется согласно процессу: этап S201 → S204 → S205 → S206.
[0082] (b) Если первая муфта CL1 не отказывает, вторая муфта CL2 находится в состоянии отказа в активированном состоянии, позиция переключения коробки передач находится в диапазоне движения (D/R), и состояние транспортного средства находится в EV-режиме при нахождении в состоянии блокировки второй муфты, или транспортное средство переходит от блокировки HEV-режима к блокировке EV-режима, то транспортное средство фиксируется в EV-режиме. Это выполняется согласно процессу: этап S201 → S204 → S205 → S207 → S208.
[0083] (c) Если первая муфта CL1 не отказывает, вторая муфта CL2 находится в состоянии отказа в активированном состоянии, позиция переключения коробки передач находится в диапазоне движения (D/R), и состояние транспортного средства отличается от (a)-(b), описанных выше, то подача движущей силы прекращается, и транспортное средство остановлено, после чего работа HEV-системы прекращается (готовность к деактивации). Это выполняется согласно процессу: этап S201 → S204 → (S205 → S207 →) S209 → S210 → S211 → S212 → S213. Помимо этого, это также выполняется согласно процессу: этап S101 → S102 → S105 → S106 → S101 во время активации транспортного средства.
[0084] (d) Если первая муфта CL1 не отказывает, вторая муфта CL2 находится в состоянии отказа в активированном состоянии, и позиция переключения коробки передач находится в диапазоне нейтрали (N), то независимо от состояния транспортного средства, подача движущей силы прекращается, и транспортное средство остановлено, после чего работа HEV-системы прекращается (готовность к деактивации). Это выполняется согласно процессу, идентичному вышеприведенному процессу по (c). Помимо этого, в диапазоне нейтрали (N), поскольку подается только давление стравливания, соответствующее позиции (P) клапана 113a с ручным управлением, вторая муфта CL2 расцепляется, несмотря на отказ в активированном состоянии.
[0085] (e) Если первая муфта CL1 не отказывает, вторая муфта CL2 находится в состоянии отказа в активированном состоянии, и позиция переключения коробки передач находится в диапазоне парковки (P), то HEV-система активируется (готовность к активации). Это выполняется согласно процессу: этап S101 → S102 → S105 → S106 → S107 → S108. Помимо этого, в диапазоне парковки (P), поскольку подается только давление стравливания, соответствующее позиции (P) клапана 113a с ручным управлением, она расцепляется, несмотря на отказ в активированном состоянии.
[0086] (f) Если первая муфта CL1 и вторая муфта CL2 находятся в состоянии отказа в активированном состоянии, и позиция переключения коробки передач находится в диапазоне движения (D/R), то независимо от состояния транспортного средства, подача движущей силы прекращается, и транспортное средство остановлено, после чего работа HEV-системы прекращается (готовность к деактивации). Это выполняется согласно процессу: этап S201 → S204 → S205 → S207 → S209-S213. Помимо этого, это также выполняется согласно процессу: этап S101 → S102 → S105 → S106 → S101 во время активации транспортного средства.
[0087] (g) Если первая муфта CL1 и вторая муфта CL2 находятся в состоянии отказа в активированном состоянии, и позиция переключения коробки передач находится в диапазоне движения (D/R), то независимо от состояния транспортного средства, подача движущей силы прекращается, и транспортное средство остановлено, после чего работа HEV-системы прекращается (готовность к деактивации). Это выполняется согласно процессу: этап S201 → S204 → S205 → S207 → S209-S213. Помимо этого, это также выполняется согласно процессу: этап S101 → S102 → S105 → S106 → S101 во время активации транспортного средства.
(h) Если первая муфта CL1 и вторая муфта CL2 находятся в состоянии отказа в активированном состоянии, и позиция переключения коробки передач находится в диапазоне парковки (P), то активация разрешается, и HEV-система активируется (готовность к активации). Это выполняется согласно процессу: этап S101 → S102 → S105 → S106 → S107 → S108. Помимо этого, поскольку подается только давление стравливания, соответствующее позиции (P) клапана 113a с ручным управлением, вторая муфта CL2 расцепляется, несмотря на отказ в активированном состоянии.
[0088] Операции первого варианта осуществления
Далее описывается работа в случае отказа в активированном состоянии второй муфты CL2 в первом варианте осуществления на основе временной диаграммы по фиг. 8.
Пример работы по фиг. 8 является примером работы, в котором транспортное средство движется в HEV-режиме во время t00, и отказ возникает во второй муфте CL2 во время t1.
[0089] Здесь, сначала описывается работа согласно сравнительному примеру, перед описанием работы первого варианта осуществления.
Этот сравнительный пример является примером, в котором приведение в действие двигателя Eng и электромотора MG немедленно прекращается при обнаружении отказа в активированном состоянии второй муфты CL2, и приведение в действие двигателя Eng и электромотора MG запрещается после этого.
В случае этого сравнительного примера, приведение в действие двигателя Eng и электромотора MG прекращается во время t1, когда обнаруживается отказ в активированном состоянии второй муфты CL2. Следовательно, транспортное средство уменьшает скорость VSP транспортного средства посредством движения по инерции, как проиллюстрировано посредством пунктирной линии.
[0090] После этого, транспортное средство переводится в состояние готовности к деактивации во время t2, после того, как скорость VSP транспортного средства снижается до значения ниже скорости транспортного средства при блокировке (L/U-скорости транспортного средства), которая задается заранее, и транспортное средство остановлено во время t3. Когда остановлено, транспортное средство переводится в состояние выключения, в котором двигатель Eng и электромотор MG остановлены.
[0091] В этом случае, даже если активация предпринимается во время t7 в диапазоне парковки (P), транспортное средство остается в состоянии готовности к деактивации и не может активироваться.
[0092] Как описано выше, в сравнительном примере, транспортное средство может приводиться в движение только посредством движения по инерции от момента времени, в который обнаруживается отказ в активированном состоянии второй муфты CL2. Следовательно, поведение откачивания и т.д. ограничивается. Помимо этого, даже если движение в EV-режиме разрешается, расстояние возможности движения ограничено посредством оставшейся емкости аккумулятора (SOC аккумулятора) аккумулятора BAT высокой емкости.
Дополнительно, транспортное средство находится в состоянии готовности к деактивации в этом остановленном состоянии, и электроэнергия аккумулятора BAT высокой емкости не может использоваться при ожидании буксировки и т.д.; в силу этого электрический кондиционер 70 не может заставляться выполнять операцию нагрева или операцию охлаждения. Следовательно, возникает риск того, что нагрузка налагается на водителя, если внешняя температура транспортного средства является высокой или низкой.
[0093] Далее описывается работа в первом варианте осуществления.
В первом варианте осуществления, транспортное средство фиксируется в HEV-режиме во время t2, когда отказ в активированном состоянии второй муфты CL2 обнаруживается в ходе движения в HEV-режиме. Работа основана на этапах S201 → S204 → S205 → S206.
Следовательно, можно продолжать движение в HEV-режиме даже после времени t1, и может обеспечиваться большее расстояние возможности движения относительно сравнительного примера.
[0094] После этого, скорость VSP транспортного средства уменьшается вместе с уменьшением требуемой движущей силы водителя, как проиллюстрировано посредством сплошной линии на чертеже, и при уменьшении до значения, меньшего или равного скорости транспортного средства при блокировке (L/U-скорости транспортного средства) во время t4, приведение в действие двигателя Eng и электромотора MG прекращается. Это выполняется согласно процессу: этап S205 → S207 → S209 → S210.
Транспортное средство в силу этого остановлено во время t5 и приводится в состояние готовности к деактивации в это время остановки транспортного средства (на основе процесса этапов S210 → S211 → S212 → S213).
Во время этой остановки транспортного средства, водитель переводит позицию переключения коробки передач в диапазон парковки (P) во время t6. Кроме того, водитель выполняет операцию активации (включения переключателя зажигания и нажатия пускового переключателя) во время t7.
[0095] В это время, в первом варианте осуществления, поскольку транспортное средство остановлено и находится в диапазоне парковки (P), HEV-система активируется. Следовательно, транспортное средство переводится в состояние готовности к активации, и электромотор MG приводится в действие, чтобы увеличивать частоту вращения электромотора, как проиллюстрировано посредством штрихпунктирной линии на чертеже, и первая муфта CL1 соединяется, чтобы запускать двигатель Eng (на основе процесса этапов S105 → S106 → S107).
[0096] Таким образом, этот случай соответствует состоянию (e) в виде управляющего списка по фиг. 7, и первая муфта CL1 может зацепляться согласно команде управления, и двигатель Eng может запускаться посредством MG приведения в действие электромотора. Помимо этого, тракт подачи гидравлического давления во вторую муфту CL2 соединяется со стороной стравливания в соответствии с позицией клапана 113a с ручным управлением; в силу этого муфта расцепляется даже в случае фиксированного задания в активированном состоянии, и транспортное средство не должно двигаться.
[0097] Следовательно, от времени t7 до времени t8, когда водитель выполняет переключение передач на диапазон движения (D/R), электрический кондиционер 70 может использоваться, и заряд для аккумулятора BAT высокой емкости также является возможным. В примере работы по фиг. 8, заряд выполняется от времени t7, и SOC аккумулятора увеличивается.
[0098] Следовательно, можно использовать электрический кондиционер 70 и уменьшать нагрузку на водителя и пассажиров, даже когда водитель ожидает эвакуатора и т.п., в течение определенного количества времени в местах, в которых внешняя среда является суровой, и т.п. В частности, можно приводить в действие двигатель Eng, подавляя вырабатывание SOC аккумулятора для аккумулятора BAT высокой емкости, и можно использовать электроэнергию в течение более длительного периода времени.
После этого, во время t8, когда водитель переключает позицию переключения коробки передач на диапазон движения (D/R), работа HEV-системы прекращается (согласно процессу этапов S109 → S110 → S111). Следовательно, даже если HEV-система активируется в состоянии отказа в активированном состоянии второй муфты CL2, транспортное средство не должно двигаться.
[0099] Преимущества первого варианта осуществления
Ниже упоминаются преимущества устройства управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления.
1) Устройство управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления представляет собой устройство управления в отказоустойчивом режиме для гибридных транспортных средств, содержащее: источник мощности, включающий в себя двигатель Eng и электромотор MG; бесступенчатую трансмиссию CVT, предоставленную между электромотором MG и левым и правым передними колесами FL и FR в качестве ведущих колес; первую муфту CL1, предоставленную между двигателем Eng и электромотором MG для соединения и разъединения двигателя Eng и электромотора MG; вторую муфту CL2, предоставленную между электромотором MG и бесступенчатой трансмиссией CVT для соединения и разъединения электромотора MG и бесступенчатой трансмиссии CVT; модуль 30 определения отказов муфты в качестве средства определения отказов муфты, которое обнаруживает отказ в активированном состоянии, который соответствует отказу в состоянии зацепления второй муфты CL2; и интегрированный контроллер 10, который переключается между HEV-режимом, который использует двигатель Eng и электромотор MG в качестве источников приведения в движение, и EV-режимом, который использует только электромотор MG в качестве источника приведения в движение, посредством управления первой муфтой CL1 и второй муфтой CL2; при этом интегрированный контроллер 10 запрещает переход из HEV-режима в EV-режим, когда модуль 30 определения отказов муфты обнаруживает отказ в активированном состоянии второй муфты CL2 при движении в HEV-режиме.
Следовательно, появляется возможность подавлять величину использования электроэнергии и увеличивать проезжаемое расстояние на величину, которая движется при приведении в действие двигателя Eng с использованием топлива, по сравнению с обеспечением возможности перехода в EV-режим в случае отказа в активированном состоянии второй муфты CL2.
[0100] 2) Устройство управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления дополнительно содержит:
соленоидный клапан 111 первой муфты в качестве первого исполнительного устройства, которое изменяет зацепление и расцепление первой муфты CL1;
соленоидный клапан 112 второй муфты в качестве второго исполнительного устройства изменяет зацепление и расцепление второй муфты CL2;
источник мощности, который подает мощность в оба соленоидных клапана 111 и 112 муфты; и
средство определения отказов источника мощности (часть интегрированного контроллера 10), которое обнаруживает отказ источника мощности; при этом интегрированный контроллер 10 принудительно останавливает двигатель Eng и электромотор MG, когда средство определения отказов источника мощности обнаруживает отказ источника мощности.
Следовательно, когда источник мощности отказывает, точная информация не может получаться, и транспортное средство не может стабильно приводиться в движение.
Следовательно, можно не допускать длительного нестабильного движения транспортного средства вследствие отказа источника мощности, посредством принудительной остановки двигателя Eng и электромотора MG, когда источник мощности отказывает.
[0101] 3) В устройстве управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления, модуль 30 определения отказов муфты выполнен с возможностью отдельно обнаруживать отказ в активированном состоянии первой муфты CL1 и отказ в активированном состоянии второй муфты CL2, и средство определения отказов источника мощности обнаруживает отказ источника мощности, когда средство определения отказов муфты обнаруживает отказы первой муфты CL1 и второй муфты CL2 одновременно (определение "Да" на этапах S201 и S204).
Таким образом, если имеется одновременный отказ в активированном состоянии обеих муфт CL1 и CL2, то с большей вероятностью возникает электрическая анормальность, а не механический отказ.
Следовательно, можно обнаруживать отказ источника мощности без добавления, на стороне источника мощности, конфигурации, которая электрически обнаруживает анормальность.
[0102] 4) Устройство управления в отказоустойчивом режиме для гибридных транспортных средств согласно первому варианту осуществления содержит соленоидный клапан 112 второй муфты в качестве второго исполнительного устройства, которое направляет вторую муфту CL2 дополнительно к стороне соединения по мере того, как величина открытия клапана увеличивается;
определяется то, что отказ в активированном состоянии второй муфты CL2 имеется, когда модуль 30 определения отказов муфты обнаруживает то, что величина открытия клапана соленоидного клапана 112 второй муфты составляет, по меньшей мере, первую предварительно определенную величину открытия в течение времени, большего или равного времени определения анормальностей в качестве предварительно определенного времени, и кроме того, средство определения отказов муфты определяет то, что величина открытия клапана составляет, по меньшей мере, первую предварительно определенную величину открытия, когда управляющий ток в соленоидный клапан 112 второй муфты, который увеличивает величину открытия клапана по мере того, как управляющий ток снижается, меньше или равен значению тока для определения анормальностей в качестве первого предварительно определенного тока.
Следовательно, ошибочное обнаружение отказа в активированном состоянии подавляется, когда соленоидный клапан 112 второй муфты перерегулируется, и величина открытия клапана временно увеличивается, и может повышаться точность обнаружения отказов в активированном состоянии.
Помимо этого, поскольку значение управляющего тока в соленоидный клапан 112 второй муфты обнаруживается в качестве величины открытия клапана, появляется возможность определять величину открытия клапана в случае отказа в активированном состоянии без предоставления средства для того, чтобы обнаруживать позицию и т.д. золотника, и появляется возможность упрощать конфигурацию и сокращать затраты.
[0103] Другие варианты осуществления
Далее описывается устройство управления в отказоустойчивом режиме для гибридных транспортных средств согласно другому варианту осуществления.
Поскольку другие варианты осуществления являются примерами модификаций первого варианта осуществления, конфигурациям, общим для первого варианта осуществления, присваиваются ссылки с номерами, идентичные ссылкам с номерами первого варианта осуществления, и их описания опускаются, при этом описываются только отличия от первого варианта осуществления.
[0104] Второй вариант осуществления
Устройство управления в отказоустойчивом режиме для гибридных транспортных средств согласно второму варианту осуществления является примером, в котором обнаруживается отказ в деактивированном состоянии, в котором вторая муфта CL2 поддерживается в состоянии отсечки, и выполняется процесс обеспечения отказоустойчивого режима, соответствующий ему.
[0105] Таким образом, во втором варианте осуществления, модуль 30 определения отказов муфты выполняет процесс определения отказа в деактивированном состоянии, как проиллюстрировано на фиг. 9, параллельно с процессом определения отказов в активированном состоянии.
На этапе S401, считывается значение управляющего тока, которое управляет величиной открытия клапана соленоидного клапана 112 второй муфты (состоянием зацепления каждой муфты CL1 и CL2), и этапы переходят к этапу S402.
[0106] Затем на этапе S402, определяется то, превышает или нет значение управляющего тока значение тока для определения анормальностей в деактивированном состоянии; если значение управляющего тока превышает значение тока для определения анормальностей в деактивированном состоянии, то этапы переходят к этапу S403; а если значение управляющего тока меньше или равно значению тока для определения анормальностей в деактивированном состоянии, то этапы возвращаются к этапу S401. Значение тока для определения анормальностей в деактивированном состоянии задается равным значению тока, при котором величина открытия клапана, который соединяет сторону стравливания со стороной операции зацепления муфты соленоидного клапана 112 второй муфты, становится величиной открытия, которая превышает анормальную величину открытия, которая задается заранее и превышает диапазон величин открытия, который используется в ходе нормального управления.
[0107] На этапе S403, к которому переходят этапы, когда значение управляющего тока превышает значение тока для определения анормальностей в деактивированном состоянии, определяется то, превышает или нет длительность, в течение которой значение управляющего тока превышает значение тока для определения анормальностей в деактивированном состоянии, время определения анормальностей, которое задается заранее. Если длительность превышает время определения анормальностей, то этапы переходят к этапу S404; а если длительность не превышает время определения анормальностей, то этапы возвращаются к этапу S402. Время определения анормальностей задается равным времени, в которое можно исключать случаи, в которых анормальная величина открытия превышается вследствие перерегулирования в нормальном режиме работы.
[0108] Ниже описывается процесс отслеживания отказов муфты в ходе движения во втором варианте осуществления на основе блок-схемы последовательности операций способа по фиг. 10.
Поскольку часть первого варианта осуществления изменяется во втором варианте осуществления, описываются только измененные части.
На этапе S500, к которому переходят этапы, когда отказ в активированном состоянии не возникает во второй муфте CL2 на этапе S201, определяется то, имеется или нет отказ в деактивированном состоянии второй муфты CL2. Если имеется отказ в деактивированном состоянии, то этапы переходят к этапу S209; а если отсутствует отказ в деактивированном состоянии, то этапы переходят к этапу S202.
[0109] Ниже описываются операции второго варианта осуществления.
Во втором варианте осуществления, когда отказ в деактивированном состоянии второй муфты CL2 обнаруживается, задается флаг fCLFAIL отказа муфты, и приведение в действие двигателя Eng и электромотора MG прекращается. Затем когда транспортное средство останавливается после этого, задается флаг fINHDRIVE запрещения дальнейшего движения и прекращается работа HEV-системы. Вышеприведенное основано на процессе этапов S201 → S500 → S209-S213.
[0110] Во втором варианте осуществления, если сверхток протекает вследствие короткого замыкания и т.д. в системе на основе управляющего тока во вторую муфту CL2, то вторая муфта CL2 фиксируется в расцепленном состоянии.
В таком случае, приведение в действие двигателя Eng и электромотора MG прекращается, чтобы останавливать транспортное средство.
[0111] Таким образом, если вторая муфта CL2 фиксируется в расцепленном состоянии, то движущая сила двигателя Eng и электромотора MG в качестве источников приведения в движение не может передаваться на левое и правое передние колеса FL и FR, которые представляют собой ведущие колеса. Следовательно, движение транспортного средства не может продолжаться, и движущая сила двигателя Eng и электромотора MG тратится впустую.
[0112] Следовательно, в таком случае, можно подавлять затратное энергопотребление посредством выполнения процесса обеспечения отказоустойчивого режима, который останавливает двигатель Eng и электромотор MG.
[0113] Ниже описываются преимущества второго варианта осуществления.
2-1) В устройстве управления в отказоустойчивом режиме для гибридных транспортных средств согласно второму варианту осуществления, модуль 30 определения отказов муфты дополнительно обнаруживает отказ в деактивированном состоянии, в котором вторая муфта CL2 фиксируется в состоянии отсечки, и интегрированный контроллер 10 останавливает двигатель Eng и электромотор MG, когда определяется то, что возникает отказ в деактивированном состоянии второй муфты CL2.
Следовательно, можно подавлять затратное энергопотребление в случае отказа в деактивированном состоянии второй муфты CL2.
[0114] 2-2) Устройство управления в отказоустойчивом режиме для гибридных транспортных средств согласно второму варианту осуществления дополнительно содержит соленоидный клапан 112 второй муфты, который направляет вторую муфту CL2 дополнительно к стороне соединения по мере того, как величина открытия клапана увеличивается, и
определяется то, что имеется отказ в деактивированном состоянии второй муфты CL2, когда модуль 30 определения отказов муфты обнаруживает состояние, в котором величина открытия клапана соленоидного клапана 112 второй муфты на стороне для того, чтобы стравливать рабочее давление второй муфты CL2, превышает или равна величине открытия для определения анормальностей в течение времени определения анормальностей или более. Кроме того, средство определения отказов муфты определяет то, что величина открытия клапана составляет, по меньшей мере, величину открытия для определения анормальностей, когда управляющий ток в соленоидный клапан 112 второй муфты, который увеличивает величину открытия клапана на стороне стравливания по мере того, как управляющий ток увеличивается, превышает значение тока для определения анормальностей в деактивированном состоянии.
Следовательно, ошибочное обнаружение отказа в деактивированном состоянии подавляется, когда соленоидный клапан 112 второй муфты перерегулируется, и величина открытия клапана временно увеличивается, и может повышаться точность обнаружения отказов в деактивированном состоянии.
Помимо этого, поскольку значение управляющего тока в соленоидный клапан 112 второй муфты обнаруживается в качестве величины открытия клапана, появляется возможность определять величину открытия клапана в случае отказа в деактивированном состоянии без предоставления средства для того, чтобы обнаруживать позицию и т.д. золотника, и появляется возможность упрощать конфигурацию и сокращать затраты.
[0115] Устройство управления в отказоустойчивом режиме для гибридных транспортных средств настоящего изобретения описано выше на основе вариантов осуществления, но его конкретные конфигурации не ограничены этими вариантами осуществления, и различные модификации и добавления в проектные решения могут вноситься без отступления от объема изобретения согласно каждому пункту в формуле изобретения.
[0116] Например, в вариантах осуществления, электромотор-генератор, который допускает подачу мощности и рекуперацию, показан как электромотор, но ограничения на это не налагаются, и также может использоваться электромотор, который допускает только подачу мощности.
Помимо этого, в вариантах осуществления, показаны примеры, в которых бесступенчатая трансмиссия используется в качестве трансмиссии; тем не менее, трансмиссия не ограничена бесступенчатой трансмиссией, и также могут использоваться другие типы трансмиссий, ручные или автоматические.
[0117] Дополнительно, в вариантах осуществления, обнаружение величины открытия клапана реализовано посредством обнаружения значения управляющего тока; тем не менее, настоящее изобретение не ограничено этим, и может предоставляться датчик хода для обнаружения позиции золотника каждого соленоидного клапана, и величина открытия клапана может обнаруживаться на основе этой обнаруженной позиции.
[0118] Помимо этого, в вариантах осуществления, показан пример, в котором движение фиксируется как EV-режим при движении в EV-режиме во время отказа в активированном состоянии второй муфты; тем не менее, в зависимости от транспортного средства, двигатель и электромотор могут принудительно останавливаться.
Таким образом, известно транспортное средство, оснащенное устройством усиления при торможении, которое повышает силу нажатия педали тормоза посредством отрицательного давления двигателя. Такое транспортное средство содержит средство для резервирования определенной степени отрицательного давления в течение EV-режима, в котором накопленная величина ограничена.
Следовательно, в таком транспортном средстве, двигатель и электромотор принудительно останавливаются, когда обнаруживается то, что отказ в активированном состоянии второй муфты возникает в ходе движения в EV-режиме.
Как результат, можно предотвращать вызывание дискомфорта у водителя в силу потери функции усиления при торможении вследствие не формирования отрицательного давления двигателя, как и в случае продолжения движения в EV-режиме во время отказа в активированном состоянии второй муфты.
[0119] Дополнительно, в варианте осуществления, контроллеры 110-118 описываются как предоставляемые, но изобретение не ограничено этим; контроллеры могут быть интегрированы в один контроллер.
Изобретение относится к гибридным транспортным средством. Устройство управления отказоустойчивым режимом движения гибридного транспортного средства, содержащего первую муфту соединения и разъединения двигателя и электромотора и вторую муфту соединения и разъединения электромотора и трансмиссии, содержит модуль определения отказов муфты. Контроллер переключается между HEV- и EV-режимом. При этом контроллер запрещает переход из HEV-режима в EV-режим, когда модуль определения отказов муфты обнаруживает отказ в активированном состоянии второй муфты в ходе движения в HEV-режиме. Увеличивается проезжаемое расстояние при отказе муфты. 4 з.п. ф-лы, 10 ил.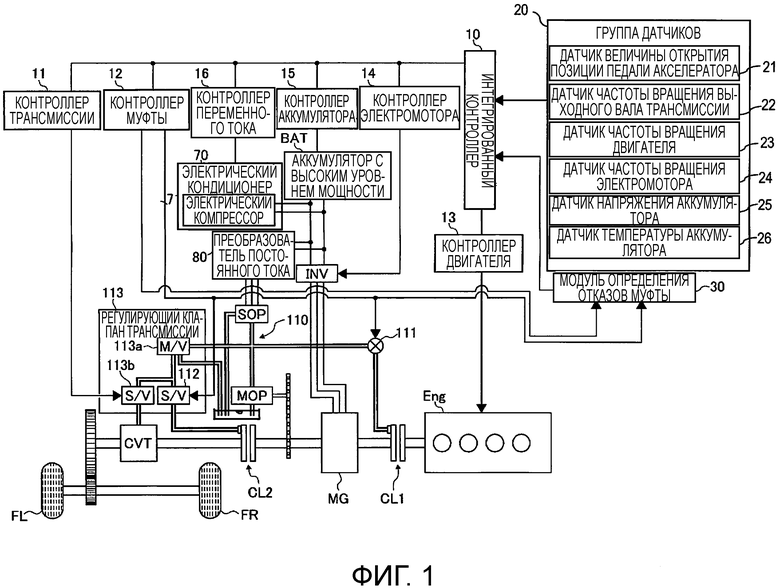
1. Устройство управления отказоустойчивым режимом движения гибридного транспортного средства, причем гибридное транспортное средство содержит:
источник мощности, включающий в себя двигатель и электромотор;
трансмиссию, предоставленную между электромотором и ведущими колесами;
первую муфту, предоставленную между двигателем и электромотором для соединения и разъединения двигателя и электромотора;
вторую муфту, предоставленную между электромотором MG и трансмиссией для соединения и разъединения электромотора и трансмиссии; причем устройство управления содержит:
модуль определения отказов муфты, который обнаруживает отказ в активированном состоянии, который соответствует отказу в зацепленном состоянии второй муфты CL2; и
контроллер, который переключается между HEV-режимом, который использует двигатель и электромотор в качестве источников приведения в движение, и EV-режимом, который использует только электромотор в качестве источника приведения в движение посредством управления первой муфтой и второй муфтой;
при этом
контроллер запрещает переход из HEV-режима в EV-режим, когда модуль определения отказов муфты обнаруживает отказ в активированном состоянии второй муфты в ходе движения в HEV-режиме.
2. Устройство управления отказоустойчивым режимом движения гибридного транспортного средства по п. 1, дополнительно содержащее:
первое исполнительное устройство, которое изменяет зацепление и расцепление первой муфты;
второе исполнительное устройство, которое изменяет зацепление и расцепление второй муфты;
источник мощности, который подает мощность в первое исполнительное устройство и второе исполнительное устройство; и
средство определения отказов источника мощности, которое обнаруживает отказ источника мощности;
при этом:
контроллер принудительно останавливает двигатель и электромотор, когда средство определения отказов источника мощности обнаруживает отказ источника мощности.
3. Устройство управления отказоустойчивым режимом движения гибридного транспортного средства по п. 2, в котором:
модуль определения отказов муфты выполнен с возможностью отдельно обнаруживать отказ в активированном состоянии первой муфты и отказ в активированном состоянии второй муфты, и
средство определения отказов источника мощности обнаруживает отказ источника мощности, когда средство определения отказов муфты обнаруживает отказы в активированном состоянии первой муфты и второй муфты одновременно.
4. Устройство управления отказоустойчивым режимом движения гибридного транспортного средства по п. 2 или 3, в котором:
соленоидный клапан второй муфты предоставляется в качестве второго исполнительного устройства, которое направляет вторую муфту дополнительно к стороне соединения по мере того, как величина открытия клапана увеличивается, и
определяется то, что отказ в активированном состоянии второй муфты существует, когда средство определения отказов муфты обнаруживает то, что величина открытия клапана соленоидного клапана второй муфты составляет первую предварительно определенную величину открытия, которая превышает диапазон величин открытия, который используется при нормальном управлении, или более в течение времени, большего или равного предварительно определенному времени.
5. Устройство управления отказоустойчивым режимом движения гибридного транспортного средства по п. 4, в котором:
соленоидный клапан второй муфты выполнен с возможностью увеличивать величину открытия клапана по мере того, как управляющий ток снижается, и
модуль определения отказов муфты определяет то, что величина открытия клапана составляет первую предварительно определенную величину открытия или более, когда управляющий ток в соленоидном клапане второй муфты меньше или равен первому предварительно определенному току, в силу чего величина открытия клапана соленоидного клапана второй муфты становится первой предварительно определенной величиной открытия, которая превышает диапазон величин открытия, который используется при нормальном управлении.
| WO 2012057131 A1, 03.05.2012 | |||
| WO 2013077161 A1, 30.05.2013 | |||
| JP 2012086738 A, 10.05.2012 | |||
| US 2013218391 A1, 22.08.2013. |

