Группа изобретений относится к области медицинской техники, а именно к активным протезам кисти и предплечья рук. Данный протез предназначен для детей и взрослых со степенью ампутации от пальцев до предплечья. Также он подходит пациентам с врожденными дефектами кисти и недоразвития пальцев.
Из уровня техники известны следующие решения.
Известна протез руки, включающий искусственную кисть, содержащую корпус, первый палец, блок второго-третьего пальцев, рычажную передачу, привод функции подвижности «схват-раскрытие кисти», а также механизм отведения-приведения второго пальца (патент РФ №2472469, опубликован 20.01.2013).
Также известен протез руки, включающий механическую кисть, содержащую ладонь, искусственные пальцы, образованные шарнирно соединенными пустотелыми фалангами, жилки для сжимания искусственных пальцев в кулак и возвратные пружинки для выпрямления искусственных пальцев. Механическая кисть также содержит храповое колесо со шкивом, расположенным под храповым колесом, и имеющим проточку по периметру для размещения пучка жилок, собачку храповика, вороток для поворачивания храпового колеса и фиксатор для удержания собачки. При этом жилки для сжимания искусственных пальцев в кулак закреплены в концах верхних фаланг, пропущены внутри искусственных пальцев, проходят в шкиве храпового колеса и закреплены в манжете, выполненной с возможностью установки выше локтевого сустава. Причем искусственные пальцы выполнены с возможностью сжимания в кулак при сгибании руки или повороте шкива с помощью воротка за счет натяжения жилок и с возможностью выпрямления за счет возвратных пружинок, при выпрямлении руки или при выведении собачки из зацепления с зубом храпового колеса.
Наиболее близким аналогом патентуемого решения является протез кисти руки, включающий механическую кисть, содержащую ладонь, искусственные пальцы, образованные шарнирно соединенными фалангами с каналами, через которые протянуты тросы, концы которых закреплены на верхних фалангах, и каналами, через которые протянуты резинки, пережатые винтами в каждой фаланге, четыре пальца объединены попарно посредством системы тросов и двух шкивов, объединенных посредством тросов и третьего шкива, который объединен с большим пальцем посредством тросов и четвертого шкива, соединенного посредством троса с узлом натяжения тросов, на механической кисти в области основания большого пальца выполнен выступ с осью поворота большого пальца, на выступе установлено основание большого пальца с зубчиками, зафиксированными на выступе посредством пружины и кнопки, расположенными в полости кисти напротив основания большого пальца, при этом основание большого пальца выполнено с возможностью поворота вокруг оси поворота большого пальца.
Техническая проблема, на решение которой направлена группа изобретений, заключается в необходимости расширения функциональных возможностей механических протезов кисти руки.
Технический результат патентуемой группы изобретений заключается в увеличении количества типов выполняемых схватов, жестов и манипуляций предметами.
Заявленный технический результат обеспечивается за счет конструкции протеза руки, включающего протез кисти руки, протез предплечья и протез лучезапястного сустава, соединяющего протез кисти руки с протезом предплечья, Протез лучезапястного сустава образован соединением протеза кисти руки и протеза предплечья посредством по меньшей мере двух гибких трубок с утолщениями на концах, каждая из которых закреплена одним концом в протезе кисти руки, другим - в протезе предплечья, протез предплечья содержит по меньшей мере два сегмента, соединенных по меньшей мере одной гибкой трубкой.
Протез кисти руки включает устройство блокировки кисти и механическую кисть, содержащую пясть, соединенные с пястью посредством суставов искусственные пальцы, образованные соединенными посредством суставов фалангами с каналами, через которые протянуты тросы, концы которых закреплены на дистальных фалангах и на концах шкивов, соединенных посредством троса с узлом натяжения тросов. Сустав, соединяющий соседние фаланги пальцев и фаланги с пястью представляет собой упругий удлиненный элемент с утолщениями на концах. На пясти в области основания большого пальца выполнена выемка с соосно закрепленными выступами, в которой установлен ротатор с отверстиями, в которые входят выступы с образованием оси ротации большого пальца, установленного на ротаторе, при этом с одной стороны ротатор содержит зубчики, расположенные радиально вокруг оси ротации большого пальца, на одном из выступов установлена пружина, а вокруг другого выступа на стенке выемки расположены зубчики, которые при установке ротатора в выемку входят в зацепление с зубчиками на ротаторе. На пясти между пальцами и узлом натяжения тросов или между узлом натяжения тросов и проксимальной частью пясти размещена система управления комбинацией положения пальцев, включающая по меньшей мере одно устройство блокировки тросов тяг, выполненное с возможностью фиксации троса.
Тросы тяг проложены внутри тефлоновых трубок, размещенных внутри каналов для тросов.
Фаланга пальца выполнена их двух частей, между которыми размещается утолщенная область сустава и которые соединяются между собой посредством болта.
Поверхность дистальной фаланги и часть проксимальной фаланги, обращенная к ладони, имеют накладки из мягкого упругого материала.
Часть поверхности фаланги, обращенная к ладони, выполнена рельефной.
Система блокировки тросов тяг пальцев по первому варианту включает полый цилиндрический корпус с конусообразным наконечником, в корпусе закреплена шайба, между конусообразным наконечником и шайбой установлен поршень в виде полого цилиндра, диаметр одного конца равен диаметру отверстия цилиндрического корпуса со стороны конусообразного наконечника и выполнен с возможностью перемещения в отверстии, другой конец упирается в шайбу, средняя часть поршня имеет диаметральное клиновидное утолщение, между шайбой и утолщением поршня установлена пружина, во внутреннем канале поршня радиально установлен шариковый подшипник.
Трос проходит по каналу, образованному полостью корпуса, отверстием в шайбе и полостью поршня.
Поршень в части, выходящей наружу конусообразного наконечника корпуса, соединен с рычагом-кнопкой.
Система блокировки тросов тяг пальцев по второму варианту включает зубчатую рейку, на которой с обеих сторон закреплены тросы тяг, над рейкой установлен храповик, который находится в зацеплении с зубцами рейки.
Система блокировки тросов тяг пальцев по третьему варианту включает клин, соединенный с пружиной, закрепленной в корпусе кисти, при этом трос проходит между клином и корпусом кисти руки.
Система управления комбинацией положения пальцев по первому варианту включает объединенные посредством рычага три устройства блокировки среднего пальца, безымянного пальца и мизинца, соединенные с пальцами посредством тросов и соединенные посредством тросов со шкивами, с которыми посредством тросов соединено устройство блокировки указательного пальца, два шкива, объединяющие попарно тросы от указательного и среднего пальцев, безымянного пальца и мизинца, соединены штангой и соединяются тросами с устройством блокировки, объединенное посредством рычага с устройством блокировки большого пальца, соединенным с большим пальцем тросом.
Система управления комбинацией положения пальцев по второму варианту включает объединенные посредством рычага три устройства блокировки среднего пальца, безымянного пальца и мизинца, соединенные с пальцами посредством тросов и соединенные посредством тросов со шкивами, с которыми посредством тросов соединено устройство блокировки указательного пальца, два шкива, объединяющие попарно тросы от указательного и среднего пальцев, безымянного пальца и мизинца, соединены штангой и соединяются тросами с устройством блокировки, объединенное посредством рычага с устройством блокировки большого пальца, соединенным с большим пальцем тросом.
Вся совокупность конструктивных особенностей заявленного протеза руки направлена на расширение функционала протеза за счет увеличения количества типов хвата, жестов и манипуляций и подходит для людей с парной ампутацией.
Механизм ротации большого пальца обеспечивает ротацию и фиксацию положение большого пальца без кнопок рычагов и фиксаторов, что позволяет использовать протез людям с парной ампутацией и расширяет количество выполняемых схватов и функциональные возможности протеза.
Устройство блокировки позволяет захватывать предмет и манипулировать им без использования второй руки, т.к. после захвата кисть не раскрывается. Функциональность возрастает, т.к. в других протезах необходимо держать кисть или локоть в определенном положении, что сильно сковывает движения и не позволяет без использования второй руки манипулировать предметами. Функция необходимо для людей с парной ампутацией.
Конструкция лучезапястного сустава и предплечья имеет три степени свободы, как лучезапястный сустав живой руки и абсолютно не ограничивает свободу лучезапястного сустава и предплечья. В аналогичных протезах лучезапястный сустав имеет только одну степень свободы и не позволяет человеку манипулировать предметами в лучезапястном суставе.
Устройство переключения жестов. Позволяет выбрать тип схвата, что расширяет функционал протеза и приравнивает активный тяговый протез по функциональности с электромеханическими протезами. В протезе есть возможность механически запрограммировать любой набор схватов.
Тросы тяг проходят через тефлоновые трубки, что снижает трение тяг о корпус кисти, увеличивает КПД, ресурс протеза и силу захвата.
Механические предохранители выполнены в виде резиновых суставов, конструкция которых предотвращает механическое разрушение пальцев и расцепляют фаланги при перегрузках.
Далее решение поясняется ссылками на фигуры, на которых приведено следующее.
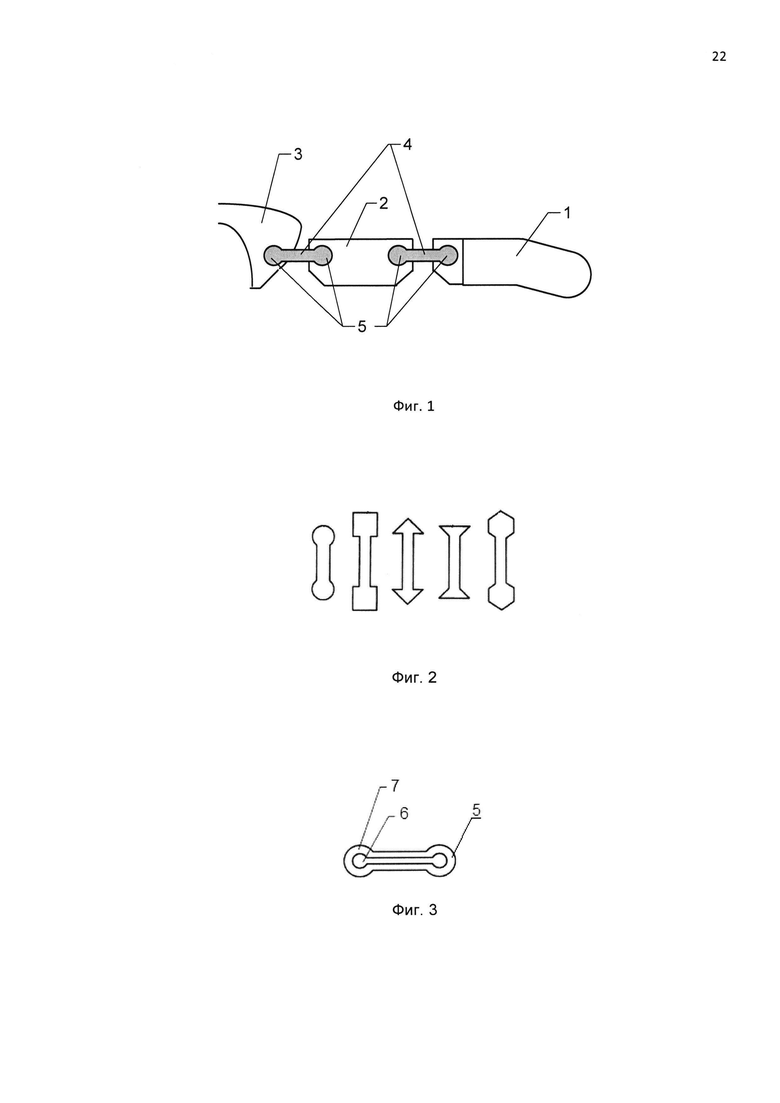
Фиг. 1 - общий вид конструкции пальца.
Фиг. 2 - типы суставов пальца.
Фиг. 3 - состав сустава пальца
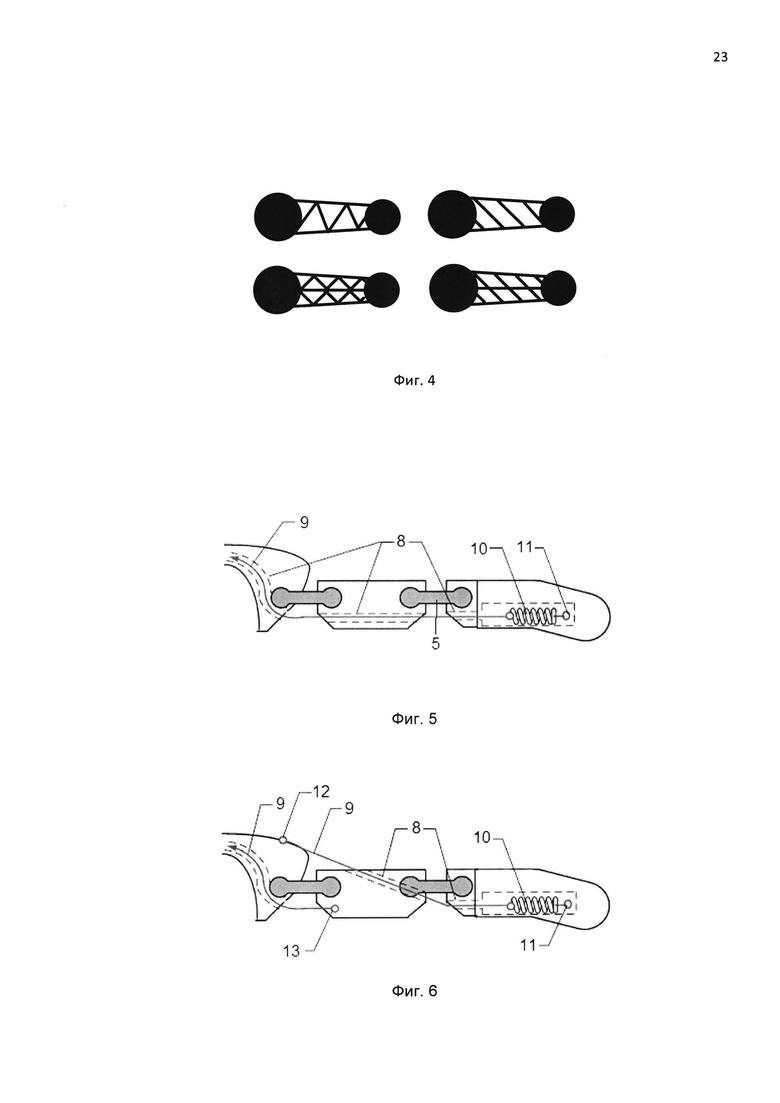
Фиг. 4 - сустав в виде тонкостенного элемента с гофровыми ребрами жесткости.
Фиг. 5 - строение пальца.
Фиг. 6 - строение пальца.
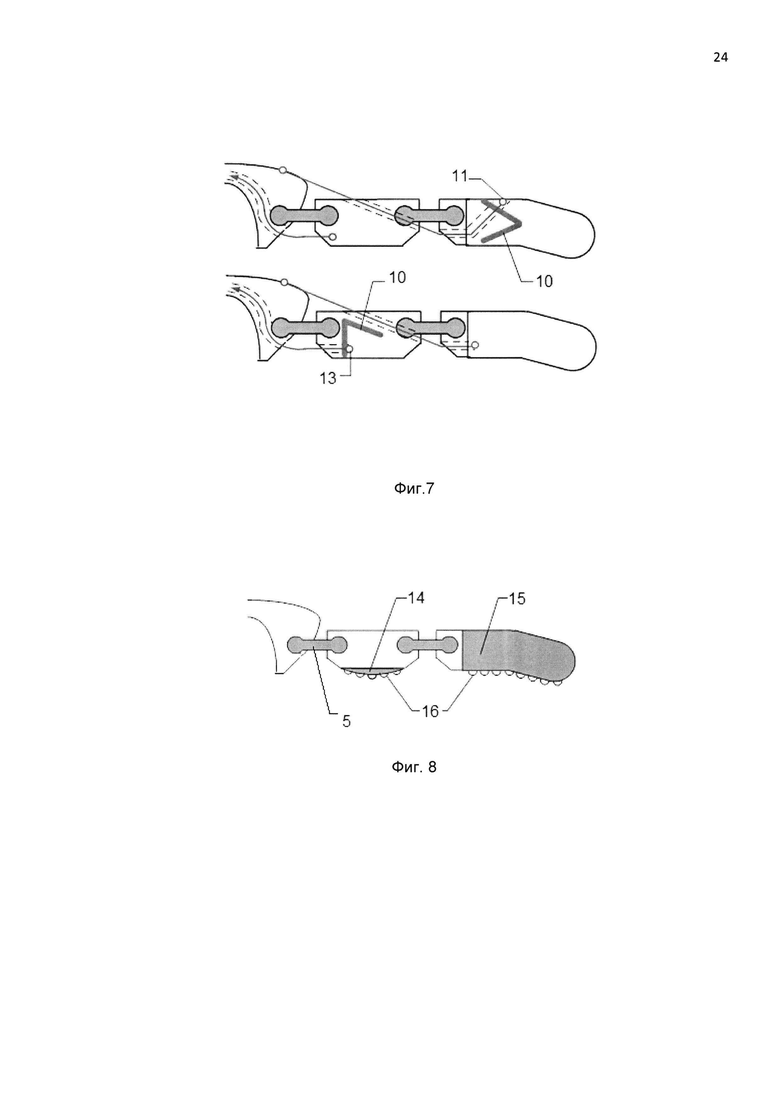
Фиг. 7 - строение пальца.
Фиг. 8 - палец с накладками.
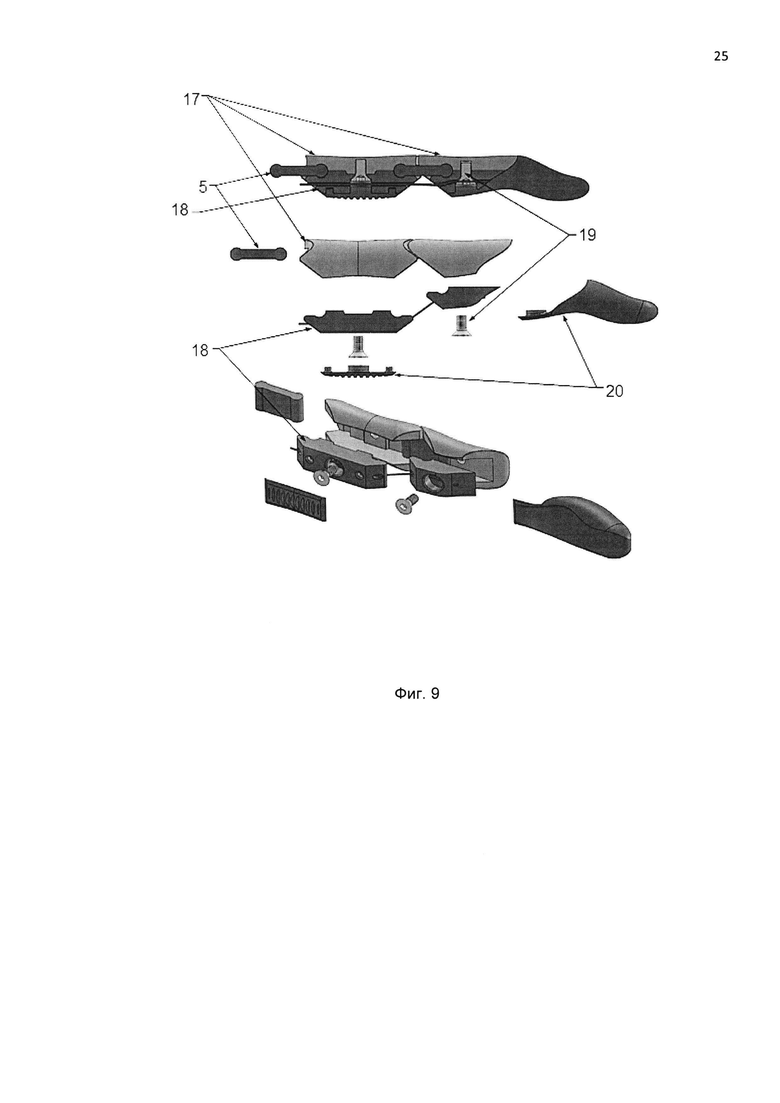
Фиг. 9 - строение корпуса пальца.
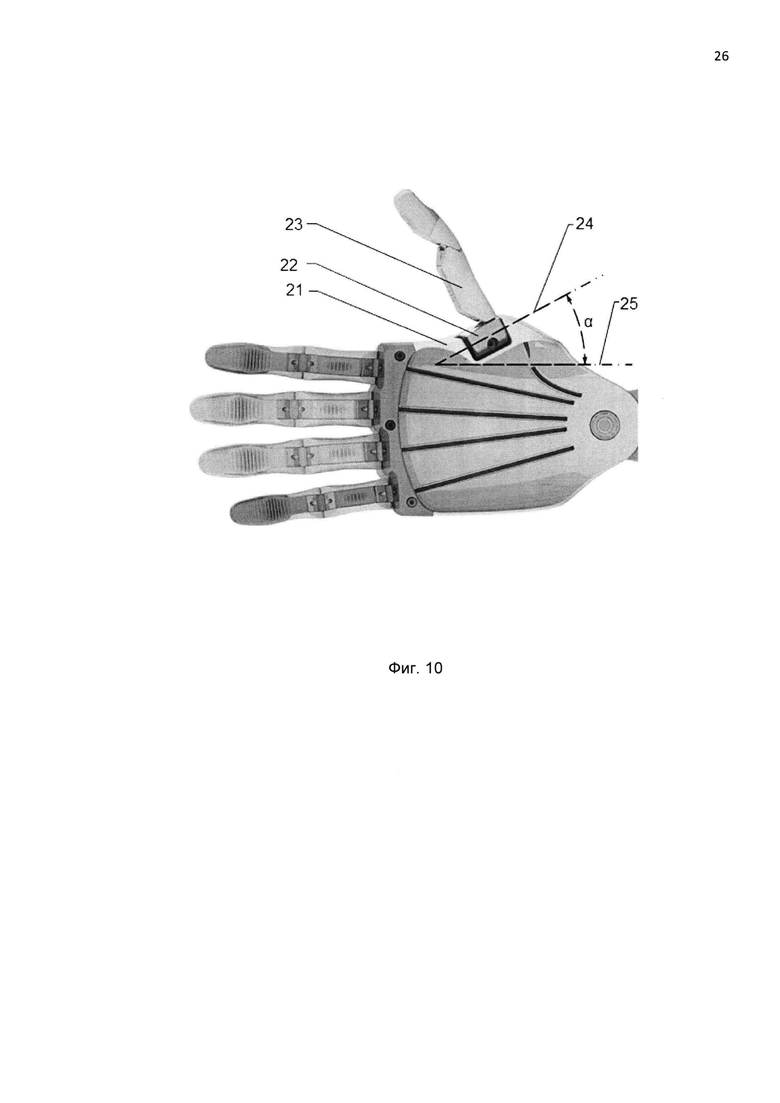
Фиг. 10 - общий вид механической кисти.
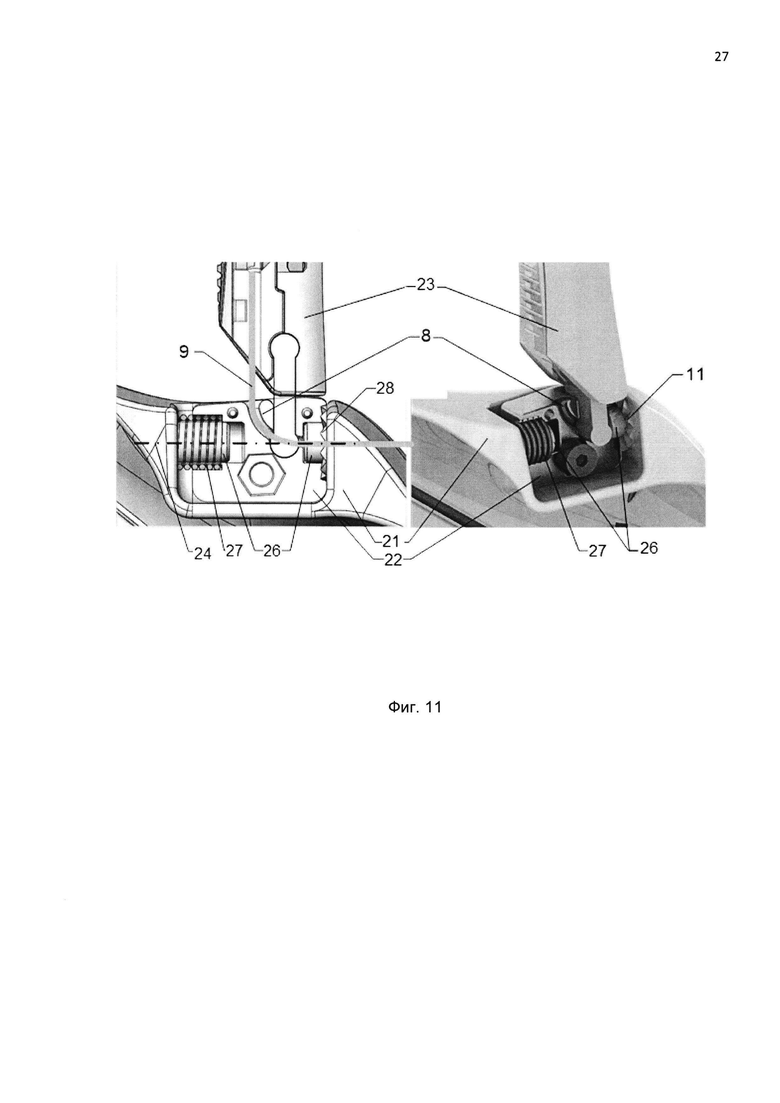
Фиг. 11 - общий вид основания большого пальца с ротатором большого пальца.
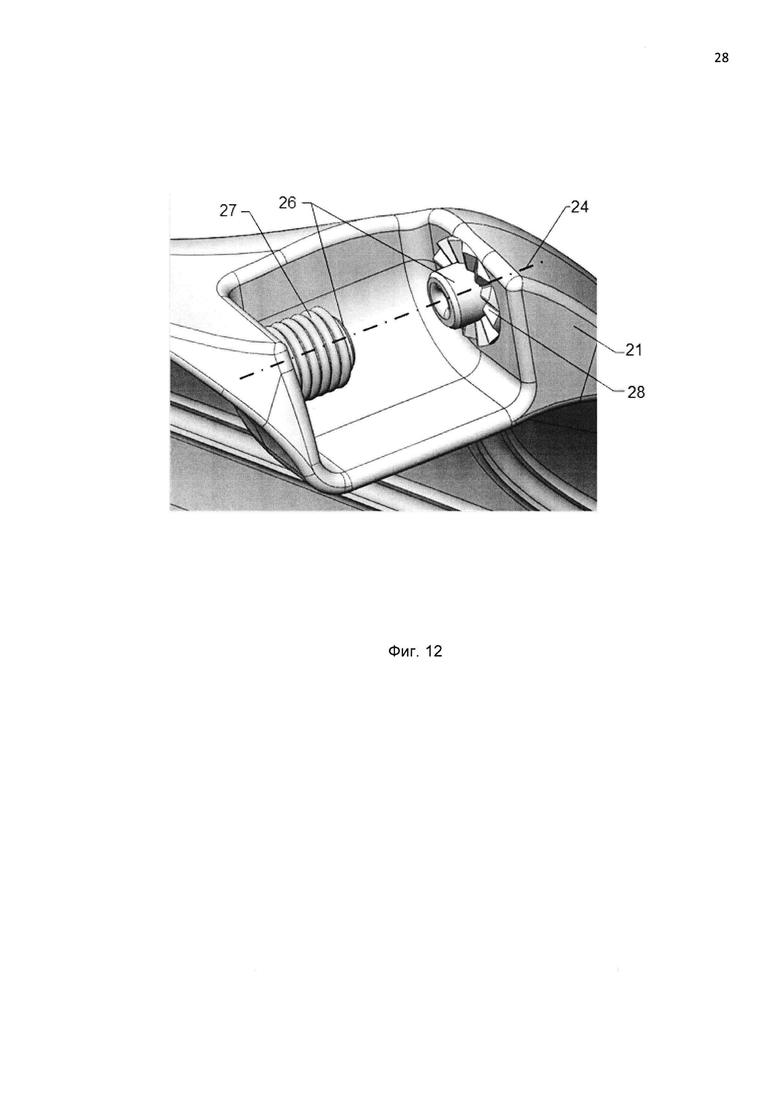
Фиг. 12 - общий вид основания большого пальца.
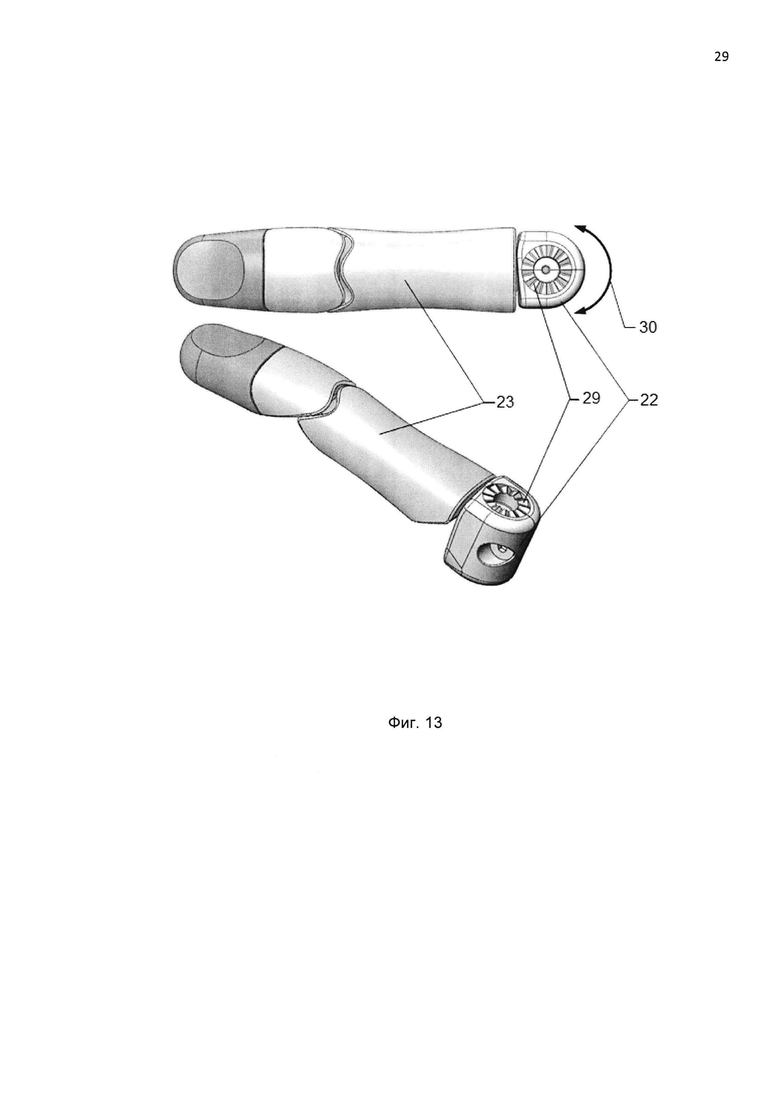
Фиг. 13 - общий вид большого пальца.
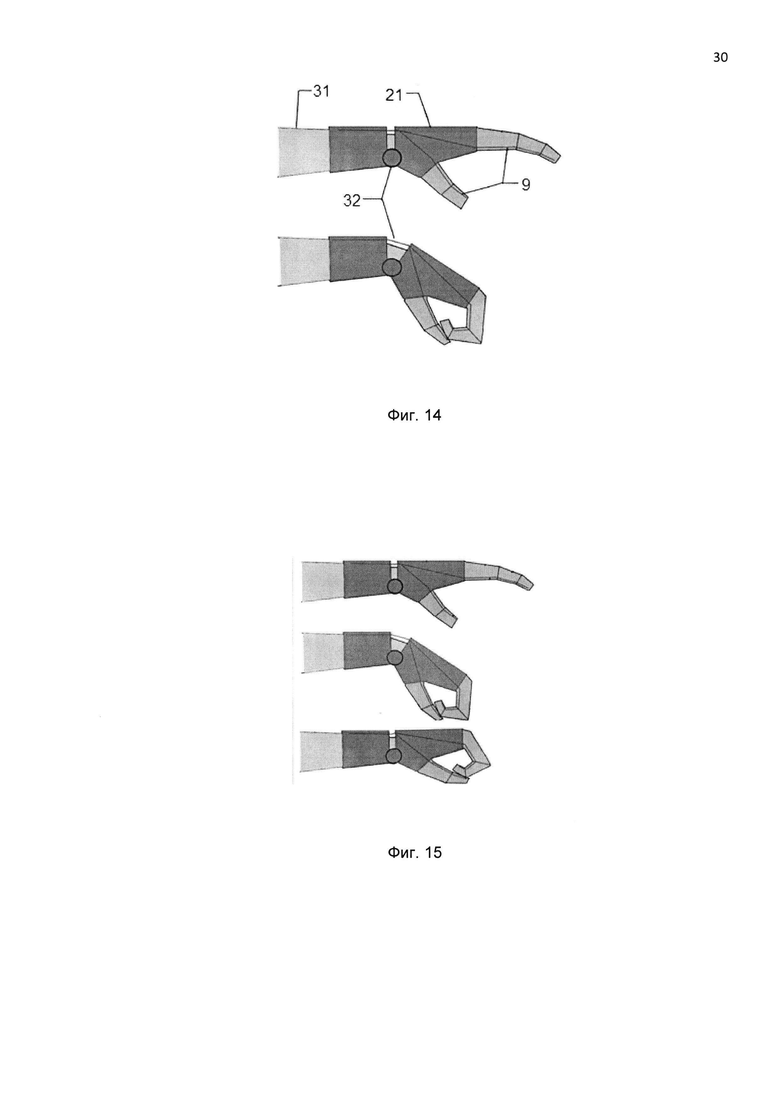
Фиг. 14 - общий вид протеза руки в различных положениях.
Фиг. 15 - общий вид протеза руки в различных положениях.
Фиг.16 - общий вид устройства блокировки тяг по первому варианту.
Фиг. 17 - схема соединения тросов от пальцев и устройства блокировки тяг по первому варианту.
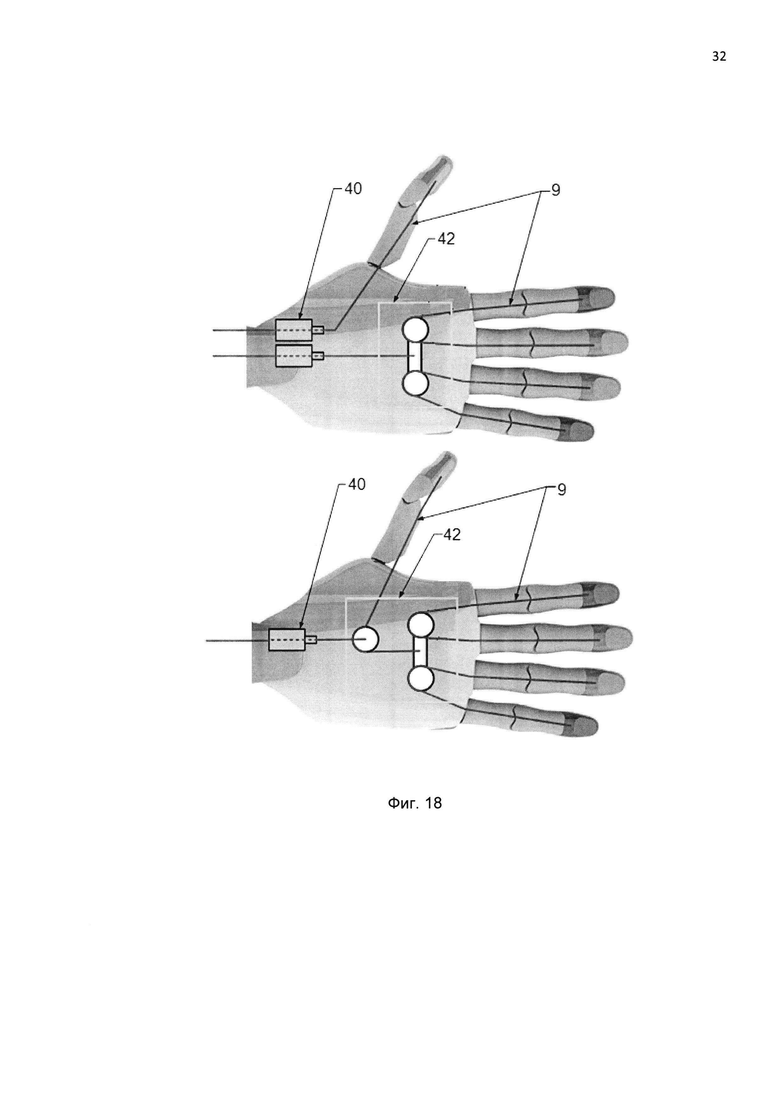
Фиг. 18 - вариант схемы соединения тросов от пальцев и устройства блокировки тяг по первому варианту.
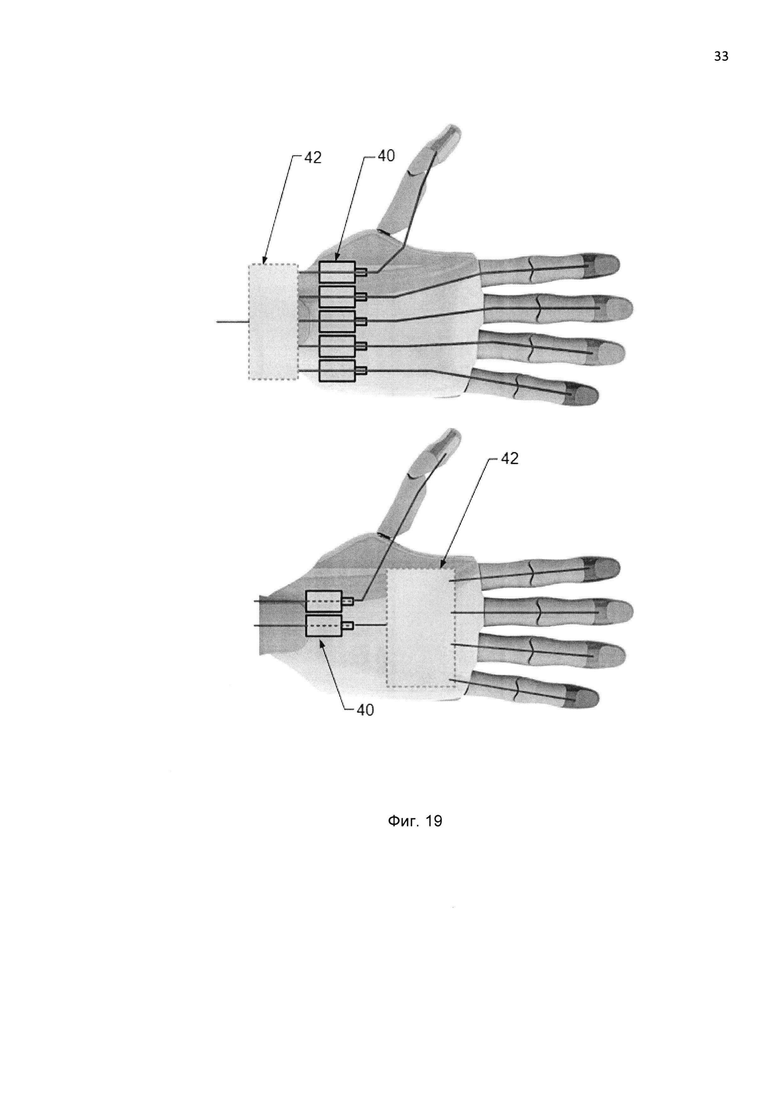
Фиг. 19 - вариант схемы соединения тросов от пальцев и устройства блокировки тяг по второму варианту.
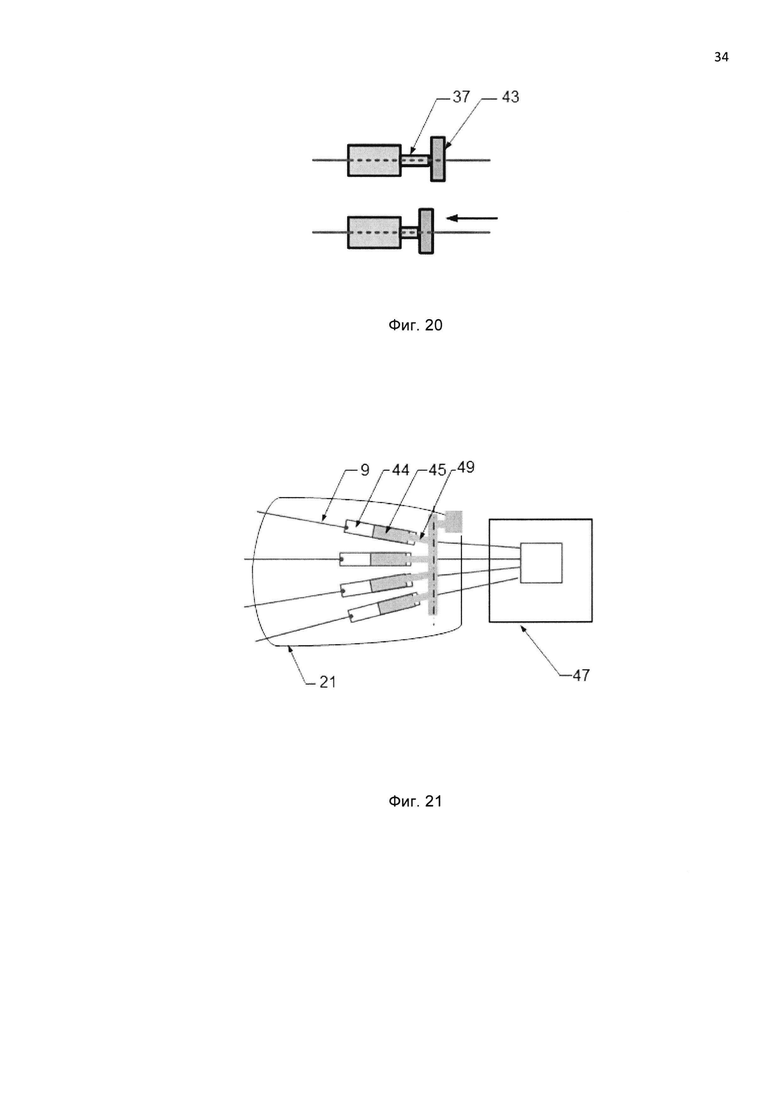
Фиг. 20 - устройство блокировки тросов с рычагом-кнопкой.
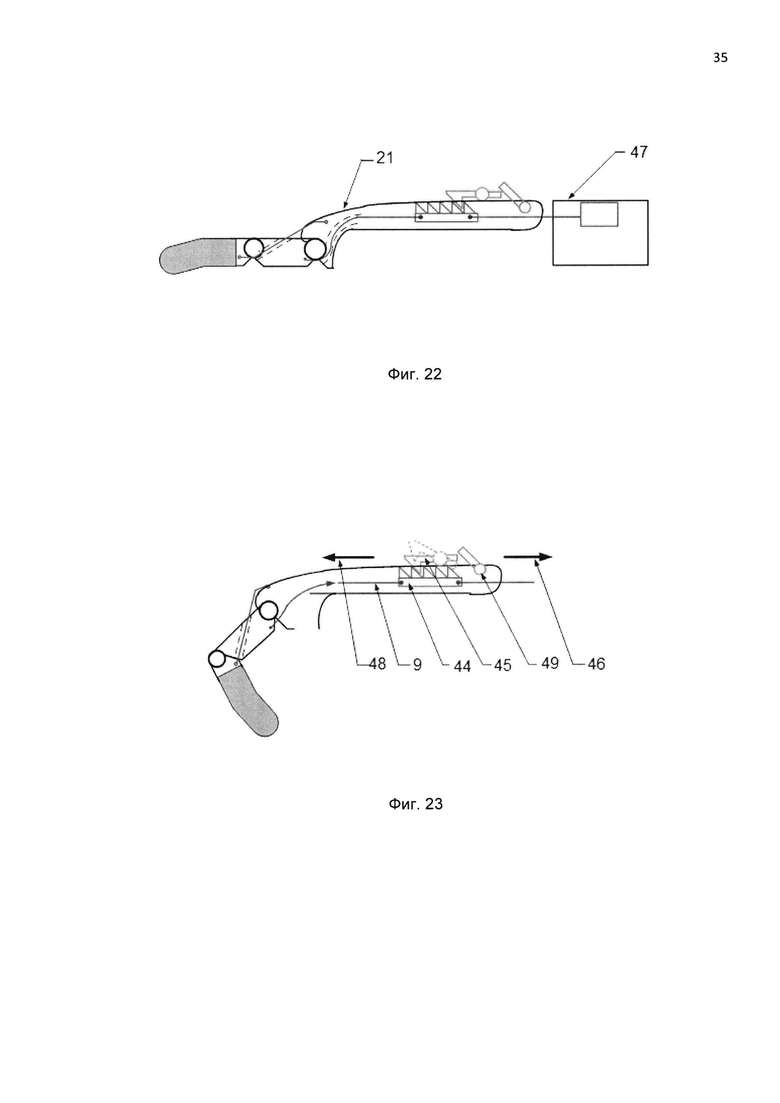
Фиг. 21 - вид системы блокировки тяг по второму варианту сверху.
Фиг. 22 - вид системы блокировки тяг по второму варианту сбоку.
Фиг. 23 - устройство блокировки тяг по второму варианту в разблокированном состоянии.
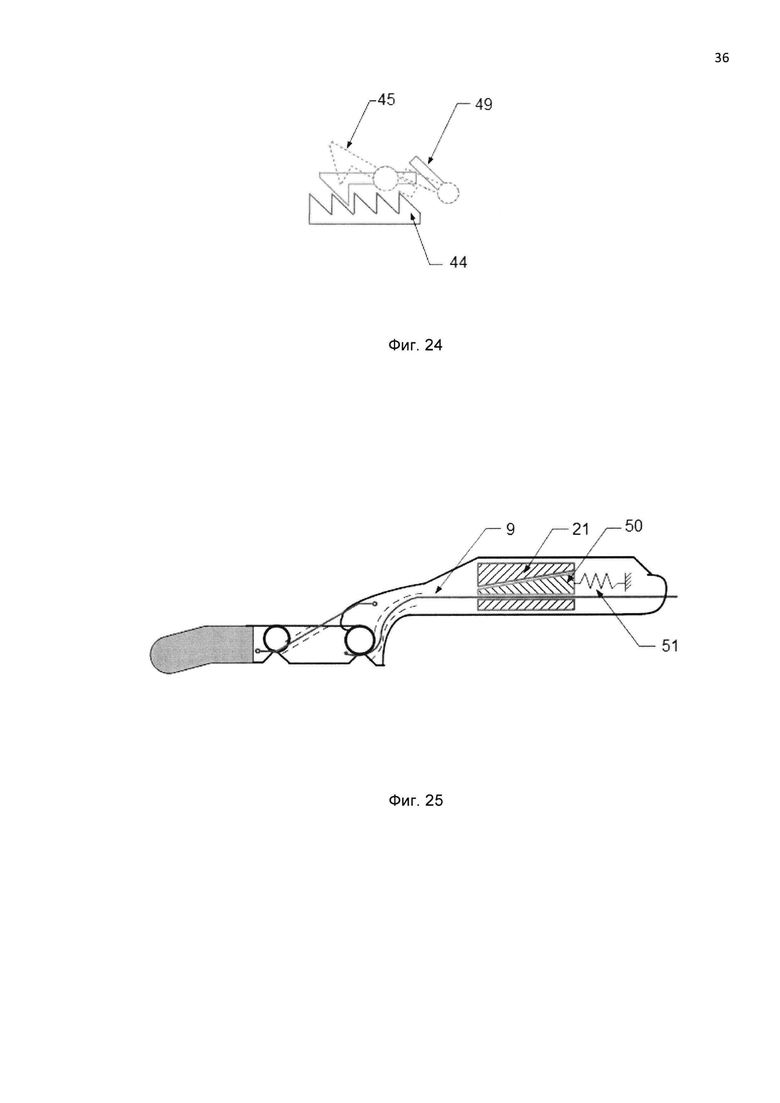
Фиг. 24 - устройство блокировки тяг по второму варианту в разблокированном состоянии и в заблокированном состоянии.
Фиг. 25 - общий вид системы блокировки тяг по третьему варианту.
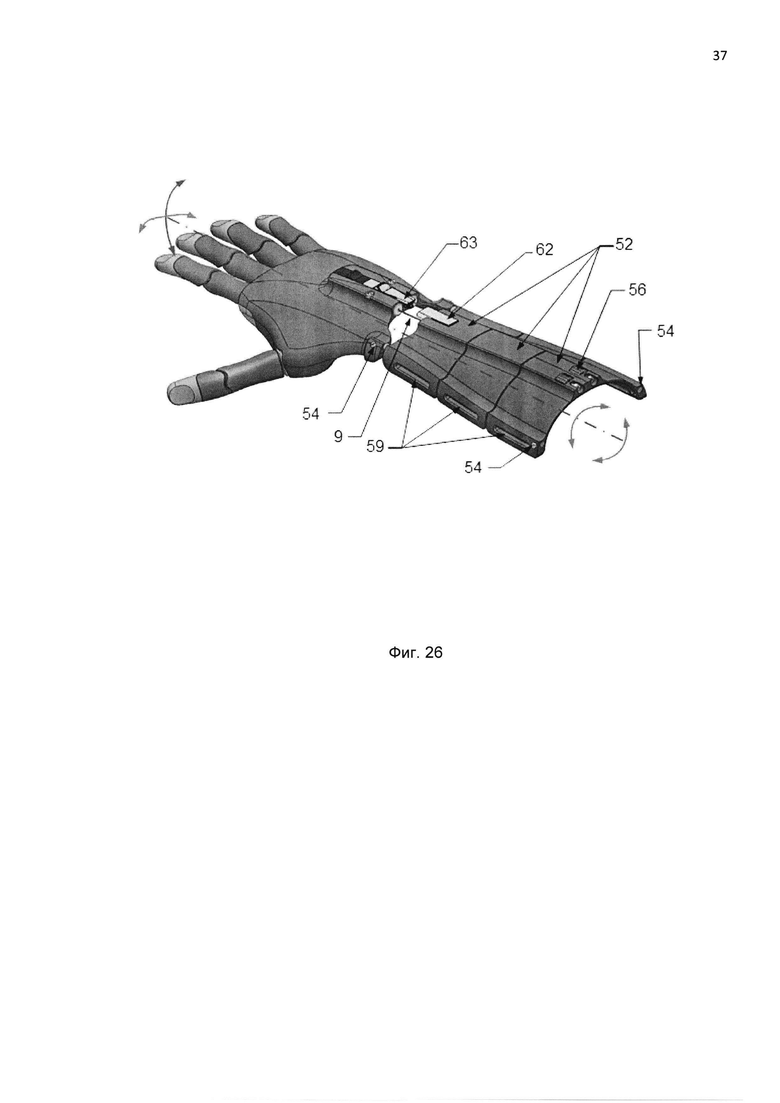
Фиг. 26 - общий вид протеза руки.
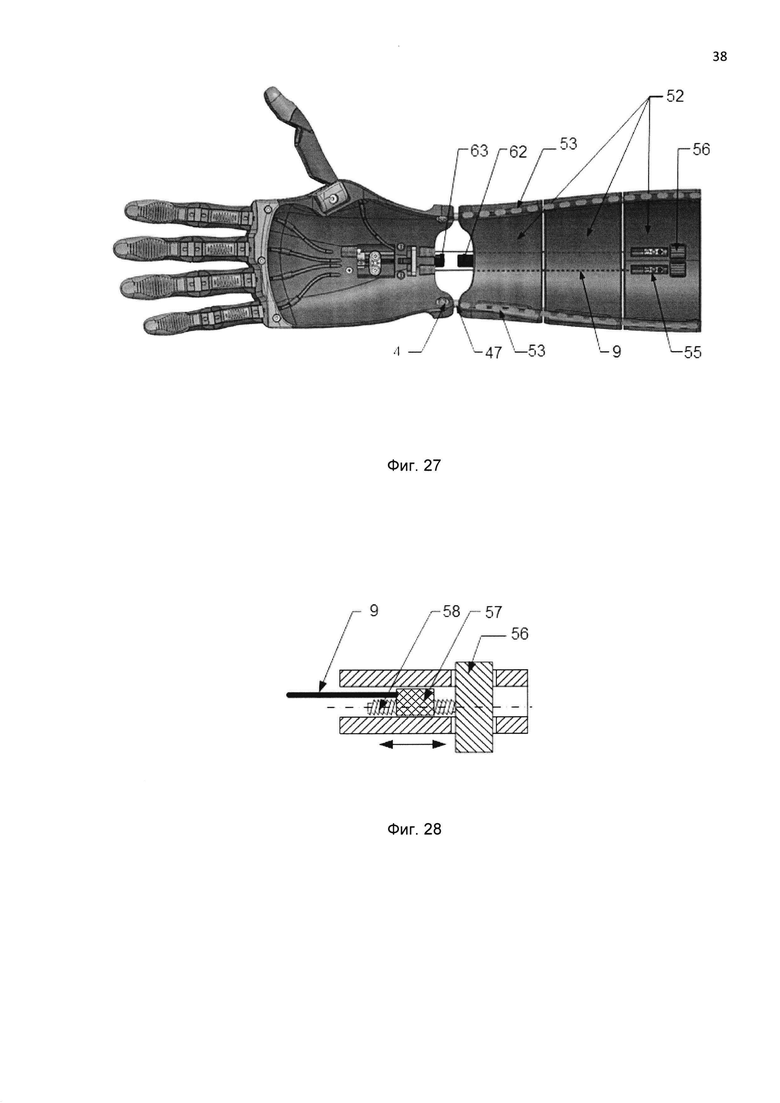
Фиг. 27 - вид протеза руки в разрезе.
Фиг. 28 - механизм натяжения тросов.
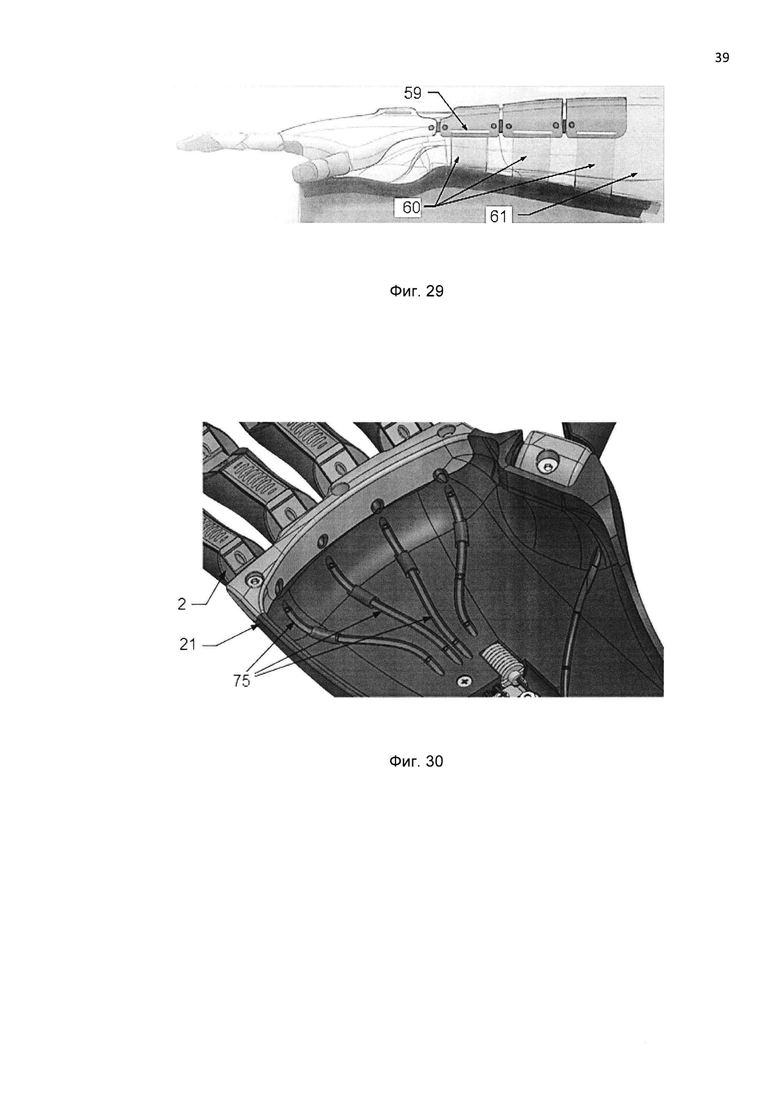
Фиг. 29 - протез руки, установленный на руке пациента.
Фиг. 30 - механическая кисть в разрезе.
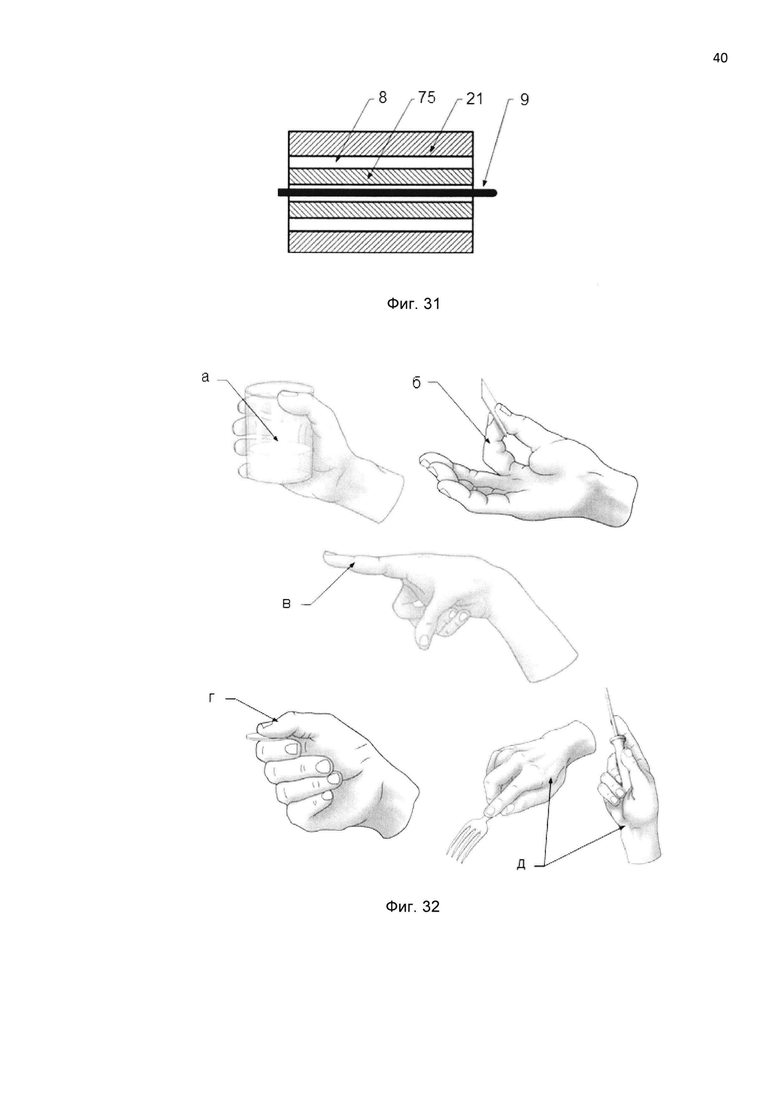
Фиг. 31 - канал с тефлоновой трубкой и тросом в разрезе.
Фиг. 32 - виды комбинаций положений пальцев - схватов.
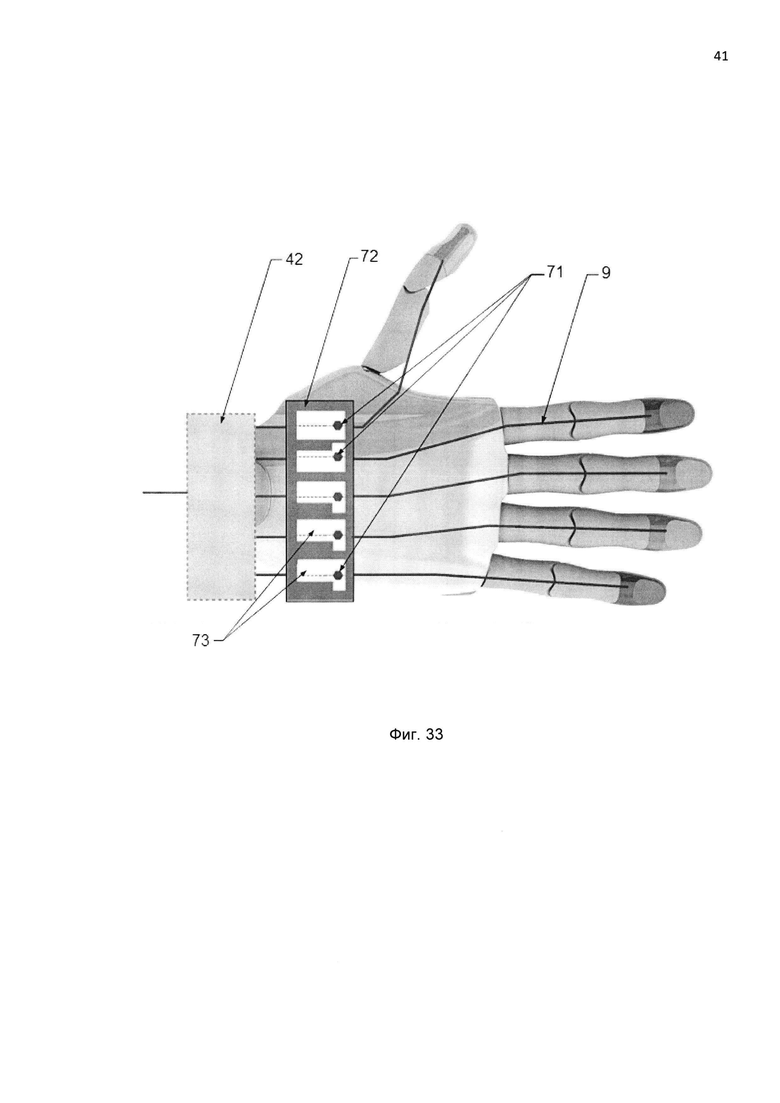
Фиг. 33 - второй вариант системы управления комбинациями положений пальцев.
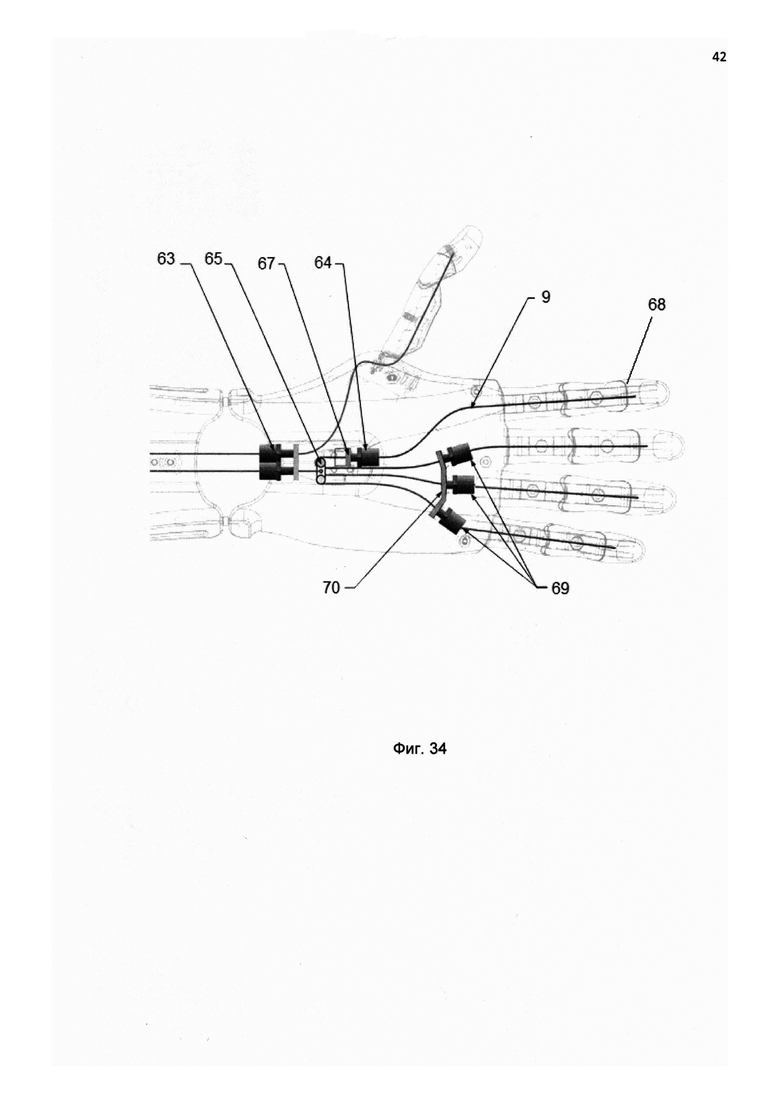
Фиг. 34 - первый вариант системы управления комбинациями положений пальцев.
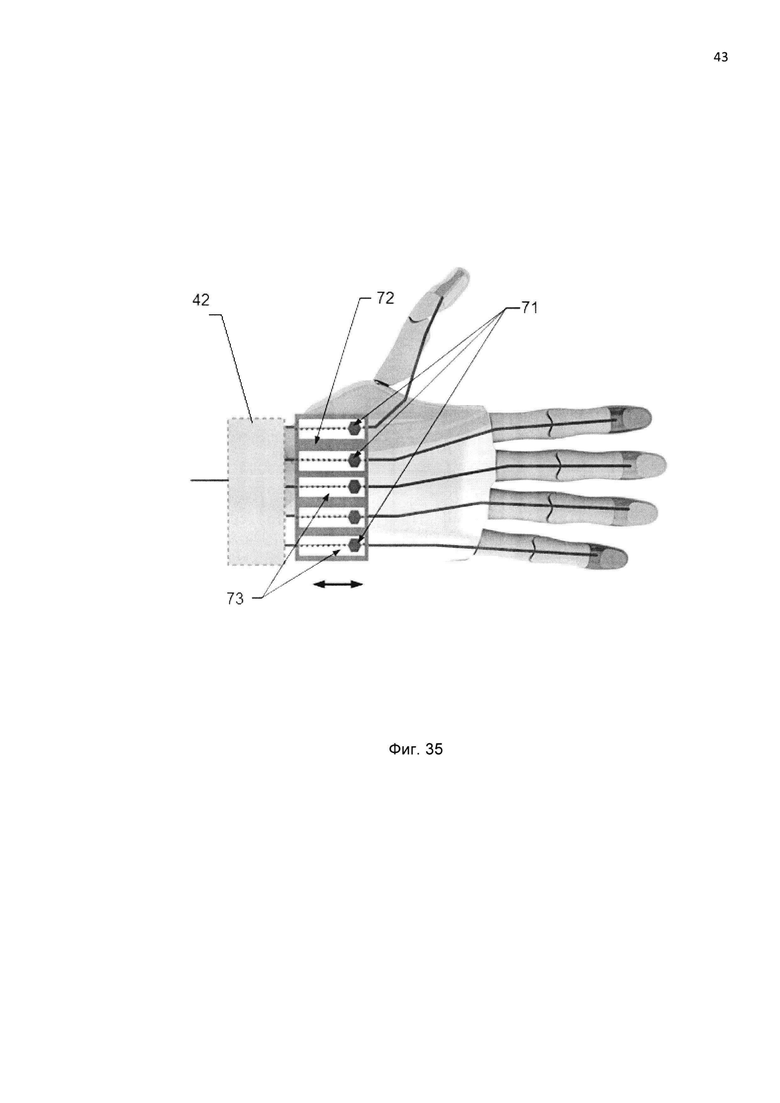
Фиг. 35 - второй вариант системы управления комбинациями положений пальцев без каналов блокировки.
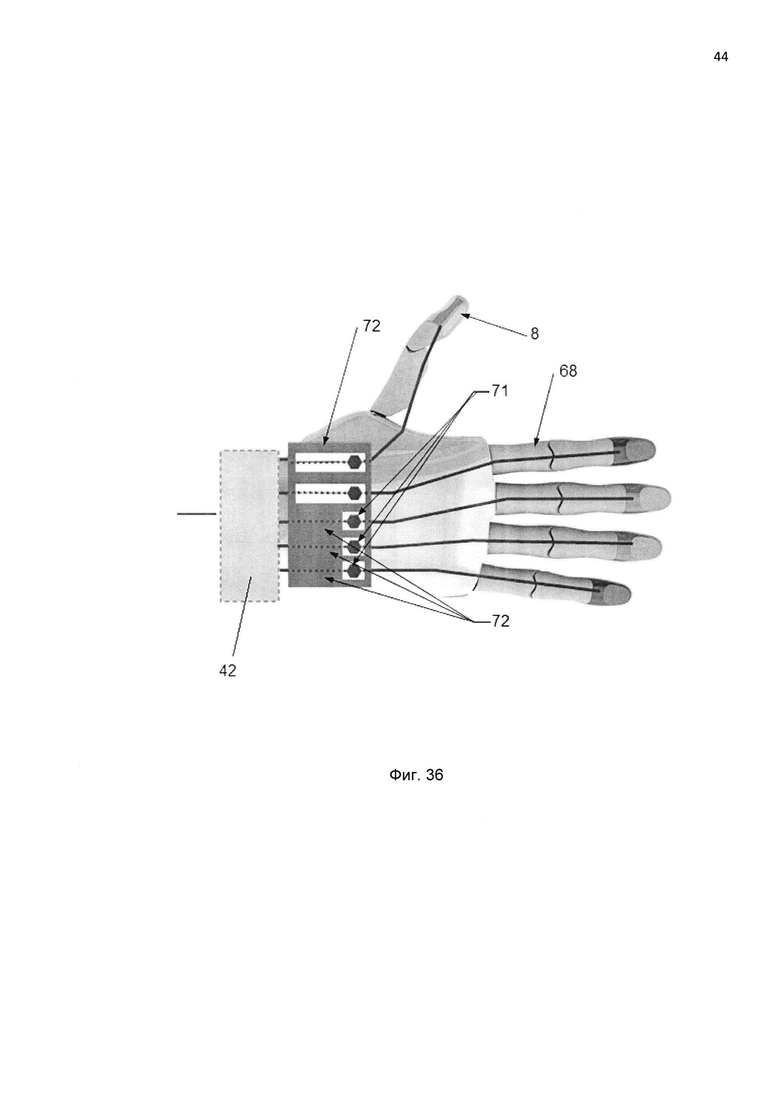
Фиг. 36 - второй вариант системы управления комбинациями положений пальцев с каналами блокировки.
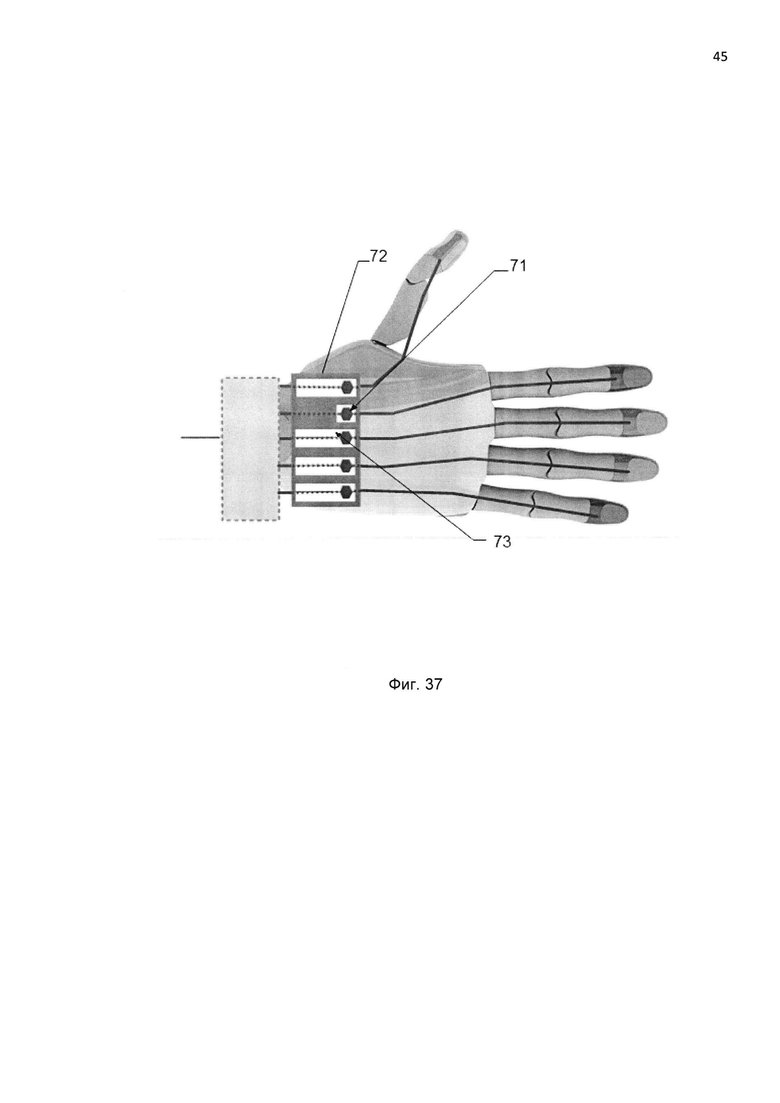
Фиг. 37 - второй вариант системы управления комбинациями положений пальцев с каналами блокировки.
В протезе конструкция пальца состоит из двух фаланг: дистальная 1 и проксимальная 2. Пальцы крепятся к корпусу кисти в области основания пальца 3.
Фаланги соединяются между собой и с кистью с помощью резиновых суставов 4. На концах резиновых суставов имеются утолщения 5, с помощью которых сустав фиксируется в фалангах и кисти.
Утолщения 5 могут иметь разную форму: окружность, прямоугольник, треугольник, шестигранник (Фиг. 2).
Утолщение 5, с учетом его деформации, должно иметь такие размеры, чтобы при нагрузке, близкой к максимальной: разрушающей фалангу и крепление фаланги с суставом, резиновый сустав отсоединялся от фаланги до их разрушения. Непосредственно перед достижением такой максимальной нагрузки (90..95% от максимальной нагрузки, которую может выдержать фаланга без разрушения), происходит расцепление сустава с фалангой, т.е. резиновый сустав отсоединяется от фаланги и кисти, для предотвращения разрушения пальцев. Положительный эффект заключается в том, что сустав с утолщением является механическим предохранителем, который предотвращает механическое разрушение пальца. Суставы пальцев являются самой хрупкой частью протеза и чаще всего выходят из строя. Резиновый сустав повышает надежность протеза за счет того, что предотвращает от разрушения при критических нагрузках.
Для уменьшения деформации поперек и деформации скручивания, сустав может состоять из двух материалов с разной жесткостью: мягкий материал 7, 2 - более жесткий и упругий материал 6 или наоборот (фиг. 3).
Также для уменьшения деформации поперек и деформации скручивания, сустав имеет конструкцию как тонкостенный элемент с гофровыми ребрами жесткости или ребрами виде сотов (Фиг. 4).
Для закрытия пальца используется трос-тяга 9. Трос-тяга проходит через кисть и фаланги пальца по каналам 8. Для закрытия пальца необходимо потянуть за трос 9, выходящий из кисти и закрепленный на проксимальной фаланге (поз 13 - место крепления троса к проксимальной фаланге) или на дистальной фаланге (поз. 11 - место крепления троса к дистальной фаланге). Открытие пальца и возврат в исходное положение происходит под воздействием упругого напряжения в согнутых резиновых суставах при отпускании троса.
Могут быть реализованы два варианта конструкции приводов пальцев тросами:
1 - Один трос проходит через обе фаланги и закрепляется в дистальной фаланге;
2 - Каждая из двух фаланг в пальце имеет отдельный трос привода фаланги (Фиг. 6). Верхняя фаланга соединяется тросом 9, проходящим в канале через дистальную фалангу 1, с основой пальца 12 и кистью. Дистальная фаланга соединена с другим тросом 9, который выходит из кисти и крепится к дистальной фаланге.
В обеих конструкциях пальцев трос-тяга может крепиться к пальцу через пружину 10. Пружина имитирует упругое растяжение сухожилий в пальце и накапливает энергию сжатия, что улучшает захват и предотвращает выскальзывание предметов из кисти. Пружина может быть как цилиндрической на растяжение (поз. 10 на Фиг. 5, 6), так и в виде V-образной упругой металлической проволоки (поз 10 на фиг. 7), за которую зацепляется тяга.
Поверхность верхней фаланги и нижняя часть нижней фаланги имеют накладки резиновые 14 и 15, силиконовые или из другого мягкого-упругого материала, для предотвращения скольжения предмета захвата. Также нижняя поверхность фаланг имеет рельеф 16.
Каждая фаланга состоит и двух частей 17 и 18. Две части фаланги соединяются между собой болтом 19, прижимают и фиксируют резиновые суставы. Места, где видны болты, закрываются резиновыми накладками 20. При перегрузке пальца и расцеплении фаланг, палец легко снова собирается. Для сборки пальца необходимо только открутить болт и вставить резиновый сустав обратно в фалангу. Также благодаря такой конструкции снаружи пальца не видно болтов и других конструктивных элементов.
Ротация большого пальца.
Во всех активных протезах положение большого пальца зафиксировано в одной позиции, нет ротации и, поэтому активные протезы могут выполнять только один широкий цилиндрический схват (Фиг. 32). Но большой палец самый подвижный и сильный палец из пяти на руке. Почти 80% всей моторики руки обеспечивает именно большой палец. Если человек лишается большого пальца, то не сможете выполнять почти 80% всех схватов и манипуляций с предметами, а если потеряет один из других четырех пальцев, то не сможете выполнять только около 20% манипуляций. Это говорит о том, что протезы, у которых большой палец зафиксирован, могут выполнить в 4 раза меньше захватов разного вида по сравнению с нашим протезом, у которого есть возможность поворачивать большой палец (Фиг. 10) и выполнять зажим субтермино-латеральной или пульпо-латеральной оппозицией (Фиг. 32).
Устройство и принцип работы системы ротации большого пальца.
На механической кисти 21, в области основания большого пальца, имеется два выступа 26 через которые проходит ось ротации большого пальца 24. Ось ротации большого пальца распложена под углом а равным от 0° до 80° относительно к положению кисти 25. На выступы 26 установлен ротатор 22 большого пальца, который поворачивается вокруг оси ротации, опираясь на выступы 26. На ротаторе установлен большой палец 23 протеза, который также поворачивается вокруг оси ротации вместе с ротатором. Ротатор с одной стороны имеет зубчики 29, расположенные радиально вокруг оси ротации большого пальца. Напротив, на кисти в области основании большого пальца, также радиально вокруг оси ротации большого пальца, расположены зубчики 28. Пружина 27 все время находится в сжатом состоянии и прижимает ротатор большого пальца 22 к зубчикам кисти 29. Таким образом, зубчики ротатора 29 контактируют с зубчиками кисти 28 и находятся с ними в зацеплении, что приводит к фиксации ротатора с большим пальцем вокруг оси ротации под углом от 0° до 90° относительно исходного крайнего положения. Для того, чтобы повернуть ротатор с большим пальцем вокруг оси ротации 24, необходимо приложить силу к большому пальцу вдоль направления ротации: по часовой или против часовой 30. Уровень силы, который необходимо приложить, чтобы повернуть ротатор, зависит от жесткости пружины 27, количества и формы зубчиков 29 и 28. Чем жестче пружина, тем сильней она прижимает ротатор зубчиками к зубчикам кисти и тем больше силу необходимо приложить, чтобы расцепить зацепление зубчатое и повернуть ротатор. Когда к большому пальцу прикладывают силу вокруг оси ротации, необходимую для поворота ротатора с большим пальцем, то ротатор 22 сдвигается в строну пружины 27 и сжимает ее. Зубчики ротатора и зубчики кисти расходятся, между ними исчезает зацепление и ротатор проворачивается на один зубчик, поворачивая вместе с собой большой палец 23. После поворота на один зубчик, ротатор под воздействием сжатой пружины возвращается в зацепление с зубчиками кисти. Если сила, приложенная для поворота ротатора, продолжает на него воздействовать, то повторяется процедура расцепления и поворот ротатора на один зубчик. Так будет продолжаться, пока сила не перестанет воздействовать на ротатор с большим пальцем. В ротаторе имеется канал через который проходит трос-тяга 9, закрывающий большой палец.
Благодаря повороту большого пальца вокруг оси ротации у него появляется дополнительная степень свободы, что приводит к увеличению количества возможных захватов в четыре раза по сравнению с протезами в которых нет возможности повернуть большой палец относительно кисти. Протез может выполнять широкие захваты, захваты плоских предметов и даже захват длинных тонких предметов, например, шариковой ручки для письма или зубной щетки. Данная конструкция ротации большого пальца позволяет поворачивать и фиксировать большой палец одним движением без нажатия кнопки блокировки или замка. Это очень важно для людей с парной ампутацией на обеих руках и позволяет им регулировать угол поворота. Также при захвате предмета, когда большой палец давит на предмет захвата, ротатор будет прижиматься к зубчикам кисти и увеличивать силу зацепления, что предотвращает непроизвольный поворот большого пальца.
Устройство блокировки тросов тяг (3 варианта).
В тяговых протезах, при натяжении тросов-тяг, кисть закрывается и находится в данном положении пока тросы натянуты. Как только натяжение тросов будет снято, пальцы вернутся в исходное состояние. Например, натяжение тросов и закрытие кисти происходит при наклоне кисти в лучезапястном суставе относительно предплечья, а открытие кисти происходит при возвращении кисти в исходное состояние (фиг. 14). Протез может удерживать предмет, только пока кисть согнута в лучезапястном суставе, что ограничивает движения и манипуляции с предметом, т.к. при движении в лучезапястном суставе протез открывается и предмет выпадает.
В протезе есть режим работы, в котором при натяжении тросов-тяг кисть закрывается, а когда натяжение тросов снимают, то кисть не раскрывается, а остается в закрытом положении (Фиг. 15). Принцип работы заключается в том, что протез включает устройство блокировки тяг, которое позволяет свободно двигаться тросам тяг в направлении от пальцев в сторону предплечья, что приводит к закрытию пальцев кисти, но не дает тросам тяг двигаться в обратную сторону в направлении от предплечья к пальцам для их открытия. Т.е. кисть может только закрываться и сохранять положение пальцев кисти в закрытом состоянии. Положительный эффект заключается в том, что человек после закрытия кисти и захвата предмета не прикладывает силу, чтобы удерживать предмет. Также после захвата предмета, человек может разогнуть кисть в лучезапястном суставе (нижнее изображение на Фиг. 15) и манипулировать захваченным предметом, вращая и наклоняя кисть в лучезапястном суставе. В других тяговых протезах при разгибании кисти происходит открытие пальцев, и предмет выпадает из захвата (верхнее изображение на Фиг. 15). Для захвата и удержания предмета необходимо все время прикладывать силу и держать кисть согнутой в лучезапястном суставе, что очень неудобно и не позволяет манипулировать предметом с помощью лучезапястного сустава.
Могут быть реализованы три варианта конструкции устройства блокировки тяг, которые включают элемент, в котором закреплен трос и элемент, фиксирующий трос в заданном положении до разблокировки.
Первый вариант включает цилиндрический корпус 40 (Фиг. 16), который сужается на одном конце и включает конусообразный наконечник 33. В корпусе установлена или вкручена неподвижная опора в виде шайбы 34. От шайбы 34 отталкивается пружина 35 и все время толкает поршень 37 в сторону 41 конусообразного конца 33 цилиндрического корпуса 40. Поршень 37 представляет собой цилиндр клиновидной формы, т.е стенка ссужается от центра цилиндра к краю. Поршень выполнен в виде полого цилиндра, диаметр одного конца равен диаметру отверстия цилиндрического корпуса со стороны конусообразного наконечника и выполнен с возможностью перемещения в отверстии, другой конец упирается в шайбу, средняя часть поршня имеет диаметральное клиновидное утолщение, между шайбой и утолщением поршня установлена пружина, во внутреннем канале поршня радиально установлен шариковый подшипник 36. Через центр поршня и всего устройства блокировки тяг проходит трос тяги пальца 9. Принцип работы заключается в том, что если потянуть за трос в направлении 39 закрытия кисти, то трос будет беспрепятственно проходить через устройство блокировки, и кисть будет закрываться. Если потянуть за трос в противоположном направлении, в направлении открытия 39 кисти, то поршень 37 вслед за тросом 9 будет двигаться в сторону 41 сужающегося конца 33 корпуса 40. Стенки сужающегося конца 33 корпуса 40 будут давить на шарикоподшипники 36, которые в свою очередь будут сдавливать трос 9, блокировать и не давать ему двигаться в направлении открытия кисти 41. Чем сильней будет сила, с который будут тянуть трос, тем сильнее трос-тяга будет сдавливаться и блокироваться шарикоподшипниками. Чтобы разблокировать трос тяги, необходимо сдвинуть поршень 37 в сторону противоположную от сужающегося корпуса, т.е. в направлении закрытия 39. Это можно сделать двумя способами:
- потянуть за трос в направлении закрытия кисти 39;
- нажав на часть поршня 37, выступающую за пределы корпуса устройства блокировки, с сужающейся стороны корпуса 33 в сторону открытия кисти 41. Для нажатия поршня используется планка, рычаг 43. Устройства блокировки тросов тяг располагаются в кисти или в предплечье. Если в протезе используется система автоматически адаптируемого захвате (описан в патенте РФ №160806 «Протез кисти руки»), то устройства блокировки тросов-тяг могут располагаются как после системы автоматически адаптируемого захват (Фиг. 18), так и до системы автоматически адаптированного захвата (Фиг. 19). Где система автоматически адаптируемого захват соединяет через шкивы попарно первый и второй, третий и четвертый пальцы. Шкивы соединяются штангой. Такая конструкция очень проста и надежна. Клиновидная форма и принцип работы корпуса и поршня устройства блокировки тяг создают надежную и сильную блокировку троса при очень маленьких размерах устройства блокировки. Устройство блокировки бесшумное и не создает звуки механических ударов, щелчков, звуков трения и скрипа. Шарикоподшипники 36 предотвращают износ троса тяги от трения и закусывания, а также способствуют разблокированию троса при минимальном приложении силы для разблокировки.
Второй вариант конструкции устройства блокировки (фиг. 21) состоит из рейки с зубцами 44 на которой закреплены тросы тяг 9. Длина рейки равна длине троса, который необходимо вытянуть, чтобы полностью закрыть палец. Над рейкой с зубцами установлен храповик 45, который находится в зацеплении с зубцами рейки. При закрытии кисти трос-тяга тянет рейку с зубцами 44 в направлении 46 лучезапястного сустава 47. Из-за наклона зубчиков рейки и храповика, зуб храповика поднимается вверх при прохождении зуба рейки и не препятствует движению рейки в направлении 46 лучезапястного сустава во время закрытия кисти. Пока храповик 45 находится в зацеплении с зубцами рейки 44, он не дает тросу-тяге 9 с рейкой 44 двигаться в направлении открытия пальцев и блокирует трос-тягу. Для разблокировки троса-тяги и открытия кисти, необходимо поднять храповик 45, чтобы расцепить зубья рейки 44 и храповика. Тогда трос-тяга с рейкой беспрепятственно будет двигаться в направлении открытия кисти. Для подъема храповика и разблокировки троса-тяги необходимо чтобы рычаг 49 повернулся, нажал на храповик и поднял его.
Третий вариант конструкции является упрощенной версией первой конструкции и представляет собой клин 50, прижимаемый пружиной 51 к корпусу кисти 21. Клин позволяет тросу-тяге беспрепятственно двигаться в одном направлении при закрытии кисти. При движении троса-тяги во время открытия кисти, клин 50 прижимает трос тягу 9 к корпусу 21 и блокирует его.
Для разблокировки кисти и ее открытия во всех трех вариантах конструкции устройства блокировки троса-тяги, необходимо повернуть кисть вверх в лучезапястном суставе на угол от 20° до 90° относительно исходного положения (Фиг. 24) или наклонить вправо, влево от на угол от 20° до 70° относительно предплечья. Угол, при котором происходит открытие кисти, настраивается с помощью регулятора (Фиг. 16 и Фиг. 26).
Предплечье и лучезапястный сустав.
Предплечье протеза - это часть протеза, которая крепится на предплечье руки и состоит из трех отдельных сегментов/деталей 52. При необходимости средний сегмент можно удалить и тогда предплечье будет состоять из двух сегментов: дистального и проксимального. Через каждый сегмент, с двух сторон, проходит трубка 53 из силикона или другого гибкого полимера, имеющего деформацию упругого растяжения. Один конец гибкой трубки крепится к дистальному сегменту. Другим концом трубки крепятся к кисти. Для фиксации трубки имеют утолщения на концах. Также фиксация трубок осуществляется винтами 54. Соединение с помощью гибкой трубки кисти и примыкающего к кисти сегмента предплечья образует подвижный лучезапястный сустав 47.
В крайнем сегменте находится механизм 55 натяжения тросов-тяг и ролик 56 механизма натяжения тросов. Тросы-тяги 9, которые закрывают кисть, закреплены на ползунке механизма натяжения тяги 55, проходят через все сегменты предплечья 52 и входят в кисть 21. Ползунок 57 механизма натяжения тяги имеет отверстие с резьбой, в которое вкручен винт 58. Винт соединен с роликом механизма натяжения тросов-тяг 56. При повороте ролика 56 винт вкручивается или выкручивается из ползунка, в результате чего ползунок перемещается вперед или назад и натягивает или ослабляет натяжение троса-тяги.
По бокам каждого сегмента 52 есть прорези для ремней 59. В этих прорезях закрепляются ремни 60, с помощью которых предплечье протеза фиксируется на предплечье руки человека 61.
В сегменте, который примыкает к кисти, соединяется с ней и образует лучезапястный сустав 47, сверху установлен регулятор угла разблокировки кисти 62. Угол поворота кисти вверх или влево и вправо, при котором регулятор 62 воздействует на устройство блокировки тросов тяг 63, снимается фиксация троса, и кисть открывается, угол необходимого поворота для возможности воздействия пластины регулятора 62 на блокировку 63 регулируется с помощью положения регулятора разблокировки. Чем дальше выдвинут регулятор из сегмента и чем ближе он к кисти, тем меньше угол поворота кисти относительно предплечья необходим для того, чтобы разблокировать кисть и открыть ее.
По сравнению с цельным предплечьем или культиприемной гильзой у других протезов, которые имеют только одну степень свободы в лучезапястном суставе, сильно сковывают и ограничивают движения руки, предплечье данной конструкции имеет три степени свободы в лучезапястном суставе относительно предплечья и одну степень свободу в предплечье относительно плеча, что полностью повторяет функционал и подвижность лучезапястного сустава и предплечья живой руки, что повышает функциональность протеза и удобство его использования. Так как лучезапястный сустав протеза представляет собой соединение кисти и предплечья с помощью гибкой трубки, то кисть может осуществлять движения относительно предплечья в трех плоскостях: 1 - наклоны вверх и вниз; 2 - повороты вправо и влево; 2 - вращение пронации и супинации (возможные направления движения показаны стрелками на Фиг. 26). Это возможно за счет упругого растяжения трубки. Когда выполняется вращение кисти пронации и супинации, то лучевые кости предплечья также осуществляют пронацию и супинацию. Цельные конструкции предплечья и культиприемных гильз не позволяют осуществлять пронацию и супинацию. Данная конструкция предплечья, за счет проходящих через сегменты гибких трубок, позволяет осуществлять пронацию и супинацию предплечья руки за счет того, что каждый сегмент предплечья протеза может смещаться по траектории пронации и супинации и относительно соседнего сегмента. При этом предплечье протеза не теряет сцепление с предплечьем руки и протез надежно закреплен на руке за счет того, что каждый сегмент предплечья протеза имеет свой собственный ремень, закрепленный в вырезах сегмента с помощью которого, он фиксируется на предплечье руки. Также предплечье состоящее из сегментов легче подгонять под индивидуальные размеры предплечья руки человека при изготовлении и ремонтировать в дальнейшем при эксплуатации.
Тефлоновые трубки.
Тросы тяг проходят от предплечья к пальцам протеза через каналы в кисти протеза. Из-за большой протяженности каналов и их сложной и изогнутой траектории, появляется большая площадь поверхности соприкосновения тросов тяг с кистью протеза, что приводит к высокому коэффициенту трения скольжения, потере КПД, быстрому износу деталей кисти протеза и тросов тяг от трения. Также появляется сопротивления усилию человека при закрытии кисти. Для уменьшения коэффициента трения между тросом тяг и поверхностью канала, по которому проходит трос тяга, в каналах 8 кисти протеза по всей их протяженности проходят PTFE (политетрафторэтилен, тефлоновые или фторопластовые) трубки 75. Тросы тяги 9 проходят внутри PTFE (тефлоновые) трубок 75. Таким образом, тросы тяг имеют контакт только с PTFE (политетрафторэтилен, тефлон или фторопласт) трубками.
PTFE (политетрафторэтилен, тефлон или фторопласт) трубки имеют низкий коэффициент трения скольжения, что приводит к уменьшению трения тросов тяг с поверхностью каналов, повышению КПД и уменьшению износы тросов тяг и кисти протеза в результате трения.
Система управления комбинацией положения пальцев (жестов).
Все активные протезы могут выполнить только один схват и жест широкий цилиндрический (Фиг. 32а), когда закрываются все пальцы одновременно. Нет возможности выбрать и исполнить один схват из набора схватов/жестов или закрывать несколько пальцев из пяти.
В данном протезе реализована система схватов/жестов. Основные схваты/жесты, которые можно реализовать:
- Указательный палец (Фиг. 32б). При данном схвате закрываются все пальцы, кроме указательного. Данный жест необходим для нажатия кнопок и работы с клавиатурой персонального компьютера, сенсорным экраном смартфона и планшета. Также данный схват «указательный палец» позволяет выполнять центрированные захваты;
- Щепоть двупалая или трехпалая (Фиг. 32б, 32г, 32д). При данном схвате закрываются большой палец с указательным или большой палец, указательный и средний.
Принцип работы системы схватов/жестов заключается в блокировке закрытия отдельных пальцев: одного или нескольких. Механически можно запрограммировать любой жест, блокируя разные комбинации пальцев. Закрытие пальцев происходит, когда натягиваются тросы. Чтобы выполнить жест необходимо одни тросы заблокировать и не позволять им двигаться и закрывать пальцы, а другие не блокировать и позволять тросам закрывать пальцы.
Могут быть реализованы два варианта конструкции системы жестов.
Первая конструкция - это блокировка тросов тяг осуществляется с помощью устройства блокировки тяг (Фиг. 16), которое установлено так, чтобы устройство блокировки (Фиг. 16) при не нажатом поршне 37, блокировало и останавливало трос тягу во время закрывание пальца. Устройство блокировки тяг для системы жестов устанавливается в кисти перед системой адаптивного захвата 65. Т.е. трос тяга при движении от пальца к предплечью, сначала проходит через устройство блокировки системы жестов 64, затем систему адаптивного захвата 65, затем через систему блокировки 63.
Жест/схват «выставленный указательный палец» осуществляется с помощью устройства блокировки тяг 64, который блокирует движение троса тяги 9 указательного пальца 68 во время закрытие кисти. Таким образом, при закрытии кисти, закрываются все пальцы кроме указательного, и получается жест/схват: выставленный указательный палец 68. Для включения и выключения схвата выставленный указательный палец используется кнопка/рычаг 67, которая нажимает на поршень 37 устройства блокировки и отключает схват, или отпускает поршень и включает схват выставленный указательный палец.
Жест/схват «щепоть» осуществляется аналогично схвату «выставленный указательный палец», только устройство блокировки блокирует тросы-тяги мизинца, безымянного и при двупалой щепоти средний палец 69. Для включения и выключения схвата используется кнопка/рычаг 70, которая нажимает на поршни 37 устройства блокировки и отключает схват, или отпускает поршни и включает схват «щепоть».
Вторая конструкция - с помощью закрепленных на тросах-тягах 9 якорей, виде многогранника, например, шестигранника 71, и пластины 72 с вырезами 73 будет происходить блокировка или разблокировка тросов-тяг при выборе жеста. При отключенных схватах/жестах все пальцы закрываются и не заблокированы. Поэтому тросы тяг с закрепленными якорями 71 движутся по направлению, показанному стрелками на фиг. 35 свободно в каналах пластины жеста/схвата 72, их ничего не блокирует.
Жест/схват «щепоть» (Фиг. 32б) осуществляется с помощью блокировки якорей и тросов-тяг мизинца, безымянного и, при двупалой щепоти, среднего пальца (Фиг. 36). В положении схват «щепоть» отсутствуют каналы в пластине 72, по которым движутся якоря мизинца, безымянного и, при двупалой щепоти, среднего пальца, и эти пальцы блокируются. Могут закрываться только палец большой, указательный и, при трехпалой щепоти, средний палец.
Жест/схват «выставленный указательный палец» (Фиг. 32в) осуществляется с помощью блокировки якоря и троса-тяги указательного пальца (Фиг. 37). Отсутствуют каналы в пластине, по которым движутся якорь указательного пальца, и указательный палец блокируется. Все остальные пальцы, кроме указательного, закрываются.
При соединении каналов трех схватов/жестов (щепоть (Фиг. 36-2), выставленный указательный палец (Фиг. 37-2) и свободное закрытие всех пальцев (Фиг. 35-2),) в одной пластине схватов/жестов, получится пластина трех схватов/жестов (Фиг. 33 поз. 72). В исходном положении пластины, у протеза включен схват/жест «свободное закрытие всех пальцев», при смещении пластины вправо от исходного положения включается схват/жест «выставленный указательный палец» а при смещении влево от исходного положения включается схват/жест «щепоть». Таким образом, смещая пластину, пользователь выбирает схват/жест. Смещение пластины должно осуществляться как при повороте кисти вправо и влево в лучезапястном суставе, так и вручную второй рукой. Пластина фиксируется в выбранном положении, и для изменения положения необходимо приложить определенное усилие.
Выбирая схват/жест, пользователь протезом может выполнить гораздо больше действий, чем активным протезом с одним охватом. С системой жестов функциональность активного протеза увеличивается до уровня сложных электромеханических протезов с внешним источником энергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАЛЕЦ ТЯГОВОГО ПРОТЕЗА И УСТРОЙСТВО ПРОТЕЗА КИСТИ И ПРОТЕЗА ПРЕДПЛЕЧЬЯ С ТАКИМИ ПАЛЬЦАМИ | 2020 |
|
RU2759777C1 |
| ПРОТЕЗ ФУНКЦИОНАЛЬНО-КОСМЕТИЧЕСКОЙ КИСТИ | 1996 |
|
RU2103950C1 |
| ПРОТЕЗ ФУНКЦИОНАЛЬНО-КОСМЕТИЧЕСКОЙ КИСТИ СО СФЕРИЧЕСКИМИ ШАРНИРАМИ "ЗАПЯСТЬЯ" И ТРЕТЬЕГО "СУСТАВА" ПЕРВОГО "ПАЛЬЦА" | 1996 |
|
RU2102037C1 |
| ПРОТЕЗ КИСТИ | 1998 |
|
RU2141289C1 |
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
| Функционально-косметический протез руки | 2023 |
|
RU2824253C1 |
| Протез кисти | 1981 |
|
SU986416A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| РЕАБИЛИТАЦИОННЫЙ ТРЕНАЖЕР ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИОНАЛЬНОСТИ КИСТЕЙ РУК, ПАЛЬЦЕВ И ЛУЧЕЗАПЯСТНОГО СУСТАВА | 2023 |
|
RU2800306C1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |

Группа изобретений относится к области медицинской техники, а именно к активным протезам кисти и предплечья рук. Протез руки для пациентов со степенью ампутации от пальцев до предплечья включает протез кисти руки, включающий систему тросов и шкивов, протез предплечья и протез лучезапястного сустава, соединяющего протез кисти руки с протезом предплечья. Лучезапястный сустав образован соединением кисти и предплечья посредством двух гибких трубок с утолщениями на концах, каждая из которых закреплена одним концом в протезе кисти, другим - в протезе предплечья. Предплечье содержит дистальный и проксимальный сегменты, соединенные двумя гибкими трубками, закрепленными с двух концов в соединяемых сегментах. В кисти установлено устройство блокировки кисти. В проксимальном сегменте предплечья установлен механизм натяжения троса тяги протеза кисти руки и регулятор угла разблокировки кисти, представляющий собой пластину, закрепленную на поверхности проксимального сегмента и выполненную с возможностью выдвижения за пределы сегмента и воздействия на устройство блокировки кисти, установленное в протезе кисти руки. Протез кисти руки для упомянутого протеза руки включает устройство блокировки кисти и механическую кисть, содержащую пясть, соединенные с пястью посредством суставов искусственные пальцы, образованные соединенными посредством суставов фалангами с каналами, через которые протянуты тросы, концы которых закреплены на дистальных фалангах и на концах шкивов, соединенных посредством троса с узлом натяжения тросов. Сустав, соединяющий соседние фаланги пальцев и фаланги с пястью, представляет собой упругий удлиненный элемент с утолщениями на концах. На пясти в области основания большого пальца выполнена выемка с соосно закрепленными выступами, в которых установлен ротатор с образованием оси ротации большого пальца, установленного на ротаторе. С одной стороны ротатор содержит зубчики, расположенные радиально вокруг оси ротации большого пальца. На одном из выступов установлена пружина, а вокруг другого выступа на стенке выемки расположены зубчики, которые при установке ротатора в выемку входят в зацепление с зубчиками на ротаторе. На пясти между пальцами и узлом натяжения тросов или между узлом натяжения тросов и проксимальной частью пясти размещена система управления комбинацией положения пальцев, включающая по меньшей мере одно устройство блокировки тросов тяг пальцев, выполненное с возможностью фиксации троса. Протез лучезапястного сустава для упомянутого протеза руки включает по меньшей мере две гибкие трубки с утолщениями на концах, каждая из которых посредством винтов закреплена одним концом в протезе кисти, другим - в протезе предплечья. Устройство блокировки тросов тяг пальцев упомянутого протеза кисти руки по первому варианту включает полый цилиндрический корпус с конусообразным наконечником, в корпусе закреплена шайба, между конусообразным наконечником и шайбой установлен поршень в виде полого цилиндра, диаметр одного конца равен диаметру отверстия цилиндрического корпуса со стороны конусообразного наконечника и выполнен с возможностью перемещения в отверстии корпуса, другой конец упирается в шайбу, средняя часть поршня имеет диаметральное клиновидное утолщение. Между шайбой и утолщением поршня установлена пружина. Во внутреннем канале поршня радиально установлен шариковый подшипник. Трос проходит по каналу, образованному полостью корпуса, отверстием в шайбе и полостью поршня.
Устройство блокировки тросов тяг пальцев упомянутого протеза кисти руки по второму варианту включает зубчатую рейку, на которой с обеих сторон закреплены тросы тяг, над рейкой установлен храповик, который находится в зацеплении с зубцами рейки. Устройство блокировки тросов тяг пальцев упомянутого протеза кисти руки по третьему варианту включает клин, соединенный с пружиной, закрепленной в корпусе кисти, при этом трос проходит между клином и корпусом кисти руки. Система управления комбинацией положения пальцев упомянутого протеза кисти руки по первому варианту включает объединенные посредством рычага три устройства блокировки среднего пальца, безымянного пальца и мизинца, соединенные с пальцами посредством тросов и соединенные посредством тросов со шкивами, с которыми посредством тросов соединено устройство блокировки указательного пальца, два шкива, объединяющие попарно тросы от указательного и среднего пальцев, безымянного пальца и мизинца, соединены штангой и соединяются тросами с устройством блокировки, объединенным посредством рычага с устройством блокировки большого пальца, соединенным с большим пальцем тросом. Система управления комбинацией положения пальцев упомянутого протеза кисти руки по второму варианту включает вытянутую пластину с поперечными каналами, через которые проходят тросы от пальцев к шкивам, на каждый трос в области канала закреплен многогранник и по меньшей мере одно устройство блокировки тросов тяг пальцев, выполненное с возможностью фиксации троса. Каналы имеют ответвления, размеры которых соответствуют размерам многогранника, а пластина выполнена с возможностью смещения вдоль прямой, перпендикулярной оси канала. Группа изобретений обеспечивает увеличение количества типов выполняемых схватов, жестов и манипуляций предметами. 8 н. и 8 з.п. ф-лы; 37 ил.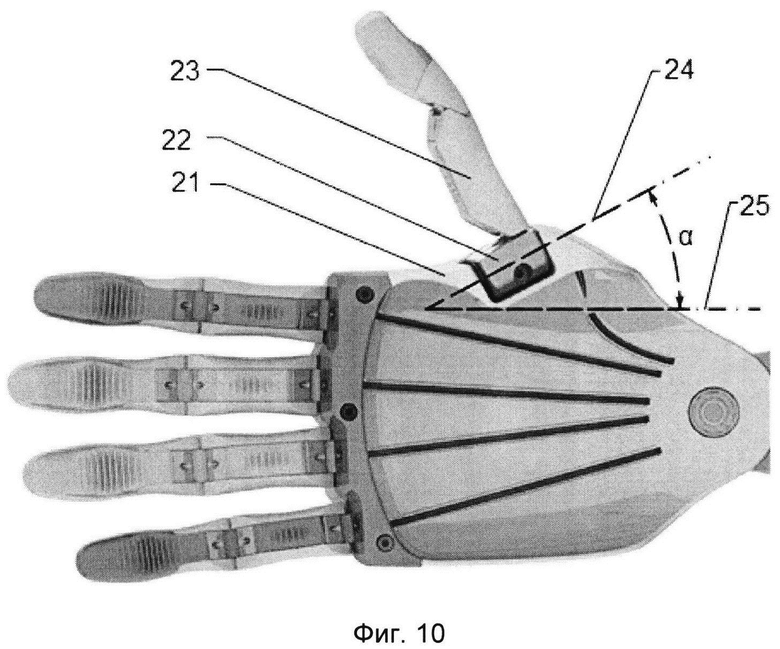
1. Протез руки для пациентов со степенью ампутации от пальцев до предплечья, включающий протез кисти руки, включающий систему тросов и шкивов, протез предплечья и протез лучезапястного сустава, соединяющего протез кисти руки с протезом предплечья, отличающийся тем, что протез лучезапястного сустава образован соединением протеза кисти руки и протеза предплечья посредством по меньшей мере двух гибких трубок с утолщениями на концах, каждая из которых закреплена одним концом в протезе кисти руки, другим - в протезе предплечья, предплечье содержит дистальный и проксимальный сегменты, соединенные двумя гибкими трубками, закрепленными с двух концов в соединяемых сегментах, в кисти установлено устройство блокировки кисти, в проксимальном сегменте предплечья установлен механизм натяжения троса тяги протеза кисти руки и регулятор угла разблокировки кисти, представляющий собой пластину, закрепленную на поверхности проксимального сегмента и выполненную с возможностью выдвижения за пределы сегмента и воздействия на устройство блокировки кисти, установленного в протезе кисти руки.
2. Протез руки по п. 1, отличающийся тем, что трубки прикреплены к сегментам предплечья и к протезу кисти посредством винтов.
3. Протез руки по п. 1, отличающийся тем, что каждый сегмент предплечья имеет прорезь для ремня.
4. Протез кисти руки для протеза руки по п. 1, включающий устройство блокировки кисти и механическую кисть, содержащую пясть, соединенные с пястью посредством суставов искусственные пальцы, образованные соединенными посредством суставов фалангами с каналами, через которые протянуты тросы, концы которых закреплены на дистальных фалангах и на концах шкивов, соединенных посредством троса с узлом натяжения тросов, отличающийся тем, что сустав, соединяющий соседние фаланги пальцев и фаланги с пястью, представляет собой упругий удлиненный элемент с утолщениями на концах, на пясти в области основания большого пальца выполнена выемка с соосно закрепленными выступами, в которых установлен ротатор с образованием оси ротации большого пальца, установленного на ротаторе, при этом с одной стороны ротатор содержит зубчики, расположенные радиально вокруг оси ротации большого пальца, на одном из выступов установлена пружина, а вокруг другого выступа на стенке выемки расположены зубчики, которые при установке ротатора в выемку входят в зацепление с зубчиками на ротаторе, на пясти между пальцами и узлом натяжения тросов или между узлом натяжения тросов и проксимальной частью пясти размещена система управления комбинацией положения пальцев, включающая по меньшей мере одно устройство блокировки тросов тяг пальцев, выполненное с возможностью фиксации троса.
5. Протез кисти руки по п. 4, отличающийся тем, что тросы тяг проложены внутри тефлоновых трубок, размещенных внутри каналов для тросов.
6. Протез кисти руки по п. 4, отличающийся тем, что фаланга пальца выполнена из двух частей, между которыми размещается утолщенная область сустава и которые соединяются между собой посредством болта.
7. Протез кисти руки по п. 4, отличающийся тем, что поверхность дистальной фаланги и часть проксимальной фаланги, обращенная к ладони, имеют накладки из мягкого упругого материала.
8. Протез кисти руки по п. 7, отличающийся тем, что часть поверхности фаланги, обращенная к ладони, выполнена рельефной.
9. Протез лучезапястного сустава для протеза руки по п. 1, характеризующийся тем, что включает по меньшей мере две гибкие трубки с утолщениями на концах, каждая из которых посредством винтов закреплена одним концом в протезе кисти, другим - в протезе предплечья.
10. Устройство блокировки тросов тяг пальцев протеза кисти руки по п. 4, характеризующееся тем, что включает полый цилиндрический корпус с конусообразным наконечником, в корпусе закреплена шайба, между конусообразным наконечником и шайбой установлен поршень в виде полого цилиндра, диаметр одного конца равен диаметру отверстия цилиндрического корпуса со стороны конусообразного наконечника и выполнен с возможностью перемещения в отверстии корпуса, другой конец упирается в шайбу, средняя часть поршня имеет диаметральное клиновидное утолщение, между шайбой и утолщением поршня установлена пружина, во внутреннем канале поршня радиально установлен шариковый подшипник, трос проходит по каналу, образованному полостью корпуса, отверстием в шайбе и полостью поршня.
11. Устройство блокировки тросов тяг пальцев по п. 10, характеризующееся тем, что поршень в части, выходящей наружу конусообразного наконечника корпуса, соединен с рычагом-кнопкой.
12. Устройство блокировки тросов тяг пальцев протеза кисти руки по п. 4, включающее зубчатую рейку, на которой с обеих сторон закреплены тросы тяг, над рейкой установлен храповик, который находится в зацеплении с зубцами рейки.
13. Устройство блокировки тросов тяг пальцев по п. 12, характеризующееся тем, что включает рычаг, установленный над храповиком, выполненный с возможностью опускания и поднятия храповика.
14. Устройство блокировки тросов тяг пальцев протеза кисти руки по п. 4, характеризующееся тем, что включает клин, соединенный с пружиной, закрепленной в корпусе кисти, при этом трос проходит между клином и корпусом кисти руки.
15. Система управления комбинацией положения пальцев протеза кисти руки по п. 4, характеризующаяся тем, что включает объединенные посредством рычага три устройства блокировки среднего пальца, безымянного пальца и мизинца, соединенные с пальцами посредством тросов и соединенные посредством тросов со шкивами, с которыми посредством тросов соединено устройство блокировки указательного пальца, два шкива, объединяющие попарно тросы от указательного и среднего пальцев, безымянного пальца и мизинца, соединены штангой и соединяются тросами с устройством блокировки, объединенным посредством рычага с устройством блокировки большого пальца, соединенным с большим пальцем тросом.
16. Система управления комбинацией положения пальцев протеза кисти руки по п. 4, характеризующаяся тем, что включает вытянутую пластину с поперечными каналами, через которые проходят тросы от пальцев к шкивам, на каждый трос в области канала закреплен многогранник, при этом каналы имеют ответвления, размеры которых соответствуют размерам многогранника, а пластина выполнена с возможностью смещения вдоль прямой, перпендикулярной оси канала, и по меньшей мере одно устройство блокировки тросов тяг пальцев, выполненное с возможностью фиксации троса.
| 0 |
|
SU160806A1 | |
| СПОСОБ ОБЖИГА МЕЛКОЗЕРНИСТОГО МАТЕРИАЛА | 2010 |
|
RU2488760C2 |
| US 20150112448 A1, 23.04.2015 | |||
| DE 19755465 A1, 17.06.1999 | |||
| US 20060129248 A1, 15.06.2006 | |||
| FR 2994831 A1, 07.03.2014 | |||
| WO 2013076683 A1, 30.05.2013. | |||

