Изобретение относится к медицинской технике в области протезирования, а именно к биоэлектрическим однохватовым протезам верхних конечностей и может быть использовано для протезирования людей с ограничениями жизнедеятельности всех половозрастных групп, имеющих врожденные пороки развития и/или ампутации на уровне кисти, вычленение в лучезапястном суставе, предплечья, а также вычленение в локтевом суставе и на уровне плеча с использованием механического ротационного локтя.
Известна искусственная кисть (патент RU 2341233, опубликовано 20.12.2008), с тяговым управлением, содержащая облицовку, каркас, установленные в нем на осях первый палец и блок II-V пальцев, шарнирно связанные между собой посредством двух промежуточных рычагов, один из которых двуплечий, пружину, шкив, соединенную с ним тягу, кулачок и ролик. Кулачок установлен на одной оси с подпружиненным шкивом и жестко связан с ним. Ролик расположен на свободном конце двуплечего рычага и поджимается к поверхности кулачка посредством дополнительной пружины, одновременно поворачивающей пальцы кисти в раскрытое положение. Кулачок профилирован таким образом, что сила трения покоя ролика равна или больше силы его скатывания по кулачку. При освобождении подпружиненного шкива и жестко связанного с ним кулачка последний через ролик и рычаги фиксирует пальцы в любом, в том числе промежуточном положении.
Недостатком данного устройства является его тяговый принцип работы. Тяговые протезы требуют большего количества ремней и креплений в области плеча, что приводит к дискомфорту пользователя. У протеза отсутствует механизм поворота запястья, который в быту очень необходим пользователю протеза. Протез открывается и закрывается только от одного строго определенного движения рукой, что вносит сложности при выполнении некоторых мелких манипуляций. При любом ударе по пальцам спереди, например, при необходимости толкнуть дверь, вся нагрузка приходится на тягу, шкив, ролик, у которых нет демпфирующей системы, что может привести к поломке изделия. Пальцы из-за своей округлой формы и неупругого материала в области ногтя не позволяют пользователю брать мелкие тонкие предметы. Ввиду сложности конструкции устройства и большого количества деталей и узлов обслуживание и ремонт должны производиться высококвалифицированным специалистом.
Также известна механическая кисть (патент RU 2245120, опубликовано 27.01.2005), содержащая ладонь, искусственные пальцы, образованные шарнирно-соединительными пустотелыми фалангами, жилки для сжимания искусственных пальцев в кулак и возвратные пружинки для выпрямления искусственных пальцев. Механическая кисть также содержит храповое колесо со шкивом, расположенным под храповым колесом, и имеющим проточку по периметру для размещения пучка жилок, собачку храповика, вороток для поворачивания храпового колеса и фиксатор для удержания собачки. При этом жилки для сжимания искусственных пальцев в кулак закреплены в концах верхних фаланг, пропущены внутри искусственных пальцев, проходят в шкиве храпового колеса и закреплены в манжете, выполненной с возможностью установки выше локтевого сустава. Причем искусственные пальцы выполнены с возможностью сжимания в кулак при сгибании руки или повороте шкива с помощью воротка за счет натяжения жилок и с возможностью выпрямления за счет возвратных пружинок, при выпрямлении руки или при выведении собачки из зацепления с зубом храпового колеса.
Недостатком данного устройства является конструкция пальцев, не позволяющая протезу выдержать удар по пальцам ни сверху, ни сбоку. При любом ударе по пальцам спереди, например, при необходимости толкнуть дверь, вся нагрузка приходится на места креплений пальцев, что может привести к поломке изделия.
Известен активный биомеханический кистевой протез (патент RU 2731607, опубликовано 07.09.2020), содержащий по крайней мере один двухсуставный внешний цилиндр, цилиндрическое колесо со спиральной прорезью, салазки, установленные на колесо, и по крайней мере один мотор. Двухсуставный внешний цилиндр выполнен в форме пальца и состоит из трех последовательно соединенных полых цилиндров. В каждом двухсуставном цилиндре размещен внутренний двухсуставный стержень из трех последовательно скрепленных между собой стержней с обеспечением возможности сгибания внешнего двухсуставного цилиндра. Цилиндрическое колесо выполнено с возможностью поворота для перемещения поперечного стержня, задающего ход движения связанному с ним нижнему внутреннему стержню и среднему полому внешнему цилиндру. Салазки выполнены в виде скоб с прорезями для движения поперечного стержня и скрепляют мотор и палец. Мотор прикреплен к основанию кисти и приводит в движение цилиндрическое колесо за счет сигналов с датчиков давления, установленных на поверхности остаточных мышц руки.
Недостатками данного устройства является его громоздкость, значительная масса, применение дорогостоящих материалов, таких как титан и тантал, необходимость наличие длинной культи предплечья для осуществления экзокрепления, обеспечивающего заявленную грузоподъемность, а также механика I пальца, не позволяющая обеспечить цепкий хват.
Наиболее близким к заявляемому решению искусственной биоэлектрической кисти руки является механизм схвата детского однохватового биоэлектрического протеза верхней конечности (патент RU 2719658, опубликовано 21.04.2020). Устройство механизма схвата детского однохватового биоэлектрического протеза верхней конечности содержит корпус, по меньшей мере один мотор или мотор-редуктор постоянного тока с планетарным, циклоидальным или волновым редуктором, по меньшей мере одну цилиндрическую зубчатую передачу и по меньшей мере одну червячную передачу. Мотор или мотор-редуктор постоянного тока с планетарным, циклоидальным или волновым редуктором соединен с основанием корпуса. Ведущее колесо цилиндрической зубчатой передачи закреплено на выходном валу мотора или мотор-редуктора и находится в зацеплении с ведомым колесом зубчатой передачи, передающим вращение на вал. Червяк червячной передачи расположен на валу, при этом червяк приводит в действие колесо червячной передачи, соединенное с подвижной конечной частью биоэлектрического протеза, заменяющей большой палец. Подвижная конечная часть биоэлектрического протеза, заменяющая большой палец, имеет рычаг, ось которого соединяется с помощью тяги с осью аналогичного рычага подвижной конечной части биоэлектрического протеза, заменяющей указательный, средний, безымянный пальцы и мизинец.
Недостатком данного технического решения является то, что в случае фронтальной нагрузки, например, при необходимости толкнуть дверь, нагрузку прежде всего испытывают тяги, зубчатые колеса и планетарная передача мотора, что негативно повлияет на долговечность механизмов.
Задачей предлагаемого изобретения является создание прочной и надежной конструкции протеза способного толкать, тянуть и выдерживать ударные нагрузки. При этом протез должен обладать цепким хватом, быть компактным и применимым для всех половозрастных групп.
Технический результат заявленного изобретения заключается в повышении прочности конструкции, ее упрощении и повышении цепкости хвата.
Заявленный технический результат достигается за счет того, что искусственная биоэлектрическая кисть руки содержит силовую раму, состоящую из верхнего и нижнего подрамников, соединенных между собой передним и задним держателями мотор-редуктора, с установленными на нее искусственными I-V пальцами, при этом искусственные II-V пальцы установлены с возможностью вращения на неподвижную ось, которая закреплена между верхним и нижним подрамниками, а искусственный I палец установлен непосредственно на верхнем подрамнике, искусственные I-V пальцы выполнены в виде двуплечих угловых рычагов, один конец которых повторяет форму соответствующего ему пальца, при этом форма искусственного пальца задается накладками из эластичного материала повышенного трения, второй конец двуплечих угловых рычагов искусственных I-V пальцев соединен с подвижной осью, второй конец двуплечего углового рычага искусственного I пальца соединен с подвижной осью посредством тяги, подвижная ось посредством двух тяг соединена с гайкой, расположенной на ходовом винте, присоединенном к выходному валу мотор-редуктора, мотор-редуктор закреплен в переднем и заднем держателе мотор-редуктора внутри силовой рамы выходным валом в направлении искусственных пальцев, при этом через задний держатель мотор-редуктора к силовой раме крепится узел ротации кисти.
При этом искусственные II-V пальцы расположены на неподвижной оси на заданном расстоянии друг от друга с помощью межпальцевых втулок, установленных на неподвижную ось между упомянутыми пальцами, при этом упомянутые пальцы жестко соединены между собой на неподвижной оси и двигаются одновременно.
При этом искусственные I-V пальцы установлены на неподвижные оси с возможностью вращения через подшипники.
При этом двуплечие угловые рычаги искусственных I-V пальцев выполнены в виде цельнометаллических деталей.
При этом верхний и нижний подрамники выполнены из алюминия.
При этом накладки из эластичного материала повышенного трения выполнены из полиуретана с вставками на уровне подушечек пальцев из полиуретана повышенного трения.
При этом механизм ротации кисти выполнен с возможность вращения кистью на 180 градусов вдоль оси искусственной биоэлектрической кисти руки.
При этом искусственная биоэлектрическая кисть руки снабжена кнопкой-индикатором заряда аккумуляторной батареи.
При этом искусственная биоэлектрическая кисть руки снабжена механизмом аварийного раскрытия кисти.
Детали, признаки, а также преимущества настоящего изобретения следуют из нижеследующего описания технического решения с использованием чертежей, на которых показано:
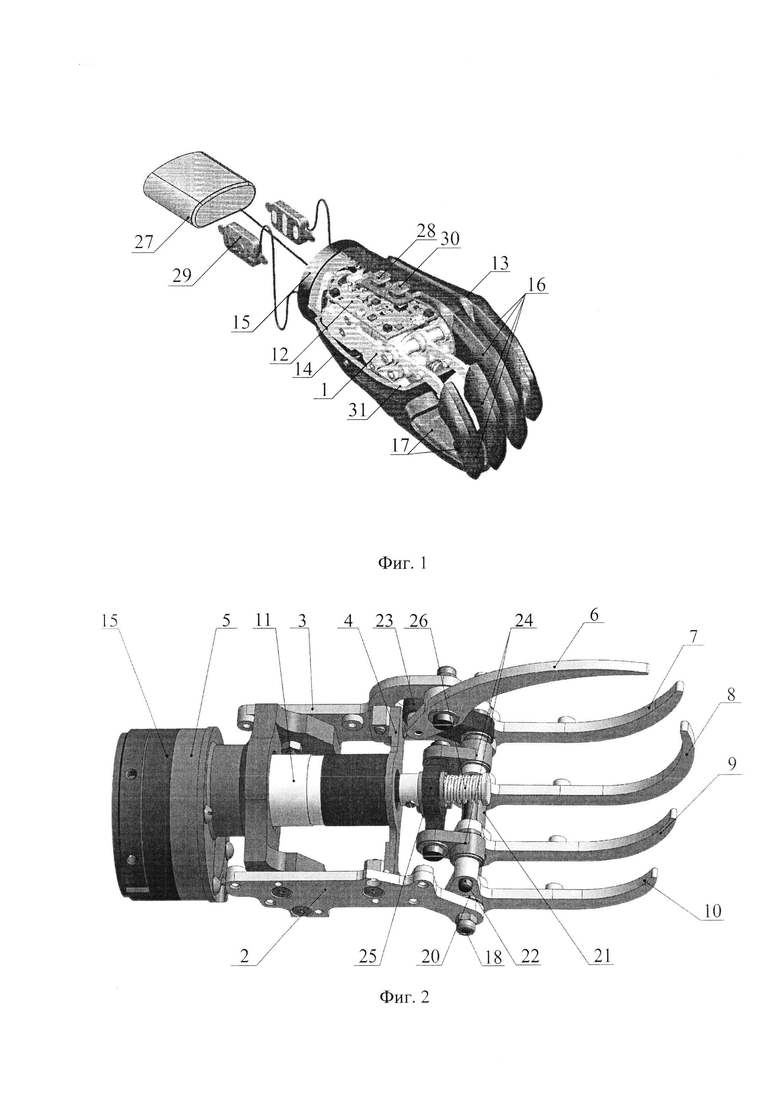
фиг. 1 - структурная схема искусственной биоэлектрической кисти руки;
фиг. 2 - структурная схема внутренней конструкции искусственной биоэлектрической кисти руки;
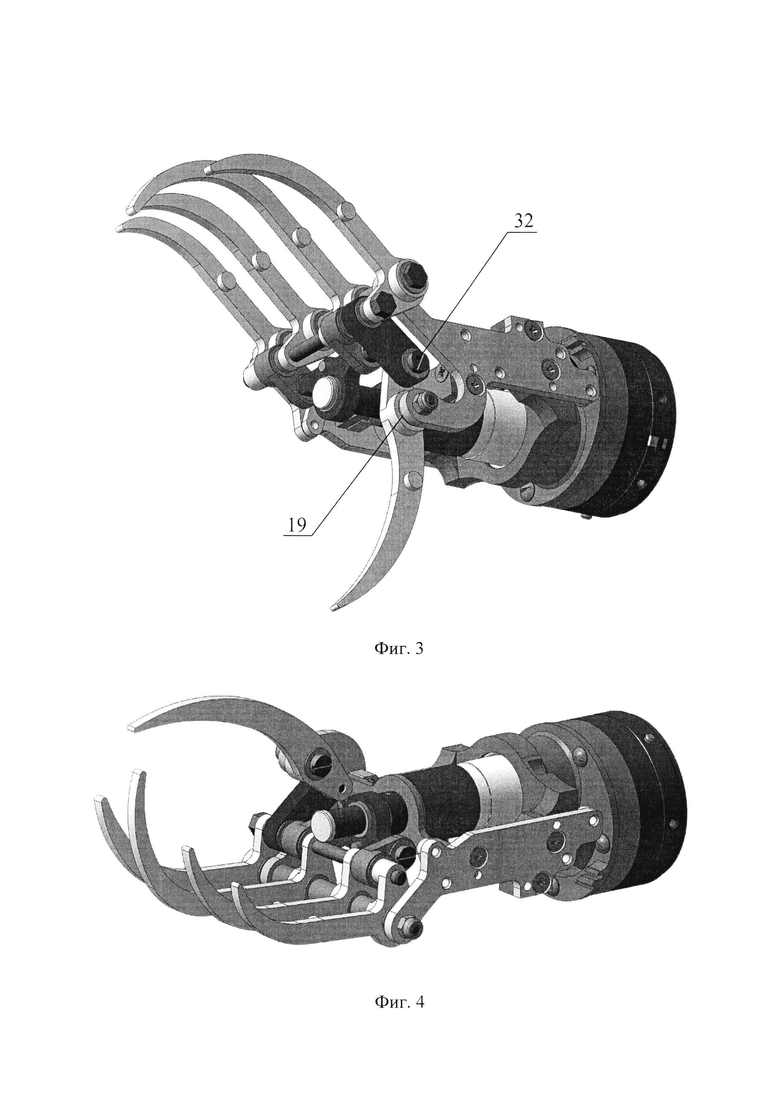
фиг. 3 - структурная схема искусственной биоэлектрической кисти руки в раскрытом состоянии;
фиг. 4 - структурная схема искусственной биоэлектрической кисти руки в сомкнутом состоянии.
Цифрами обозначены следующие конструктивные элементы: 1 - силовая рама; 2 - нижний подрамник; 3 - верхний подрамник; 4 - передний держатель мотор-редуктора; 5 - задний держатель мотор-редуктора; 6 - искусственный I палец; 7 - искусственный II палец; 8 - искусственный III палец; 9 - искусственный IV палец; 10 - искусственный V палец; 11 - мотор-редуктор; 12 - плата управления; 13 - верхняя крышка; 14 - нижняя крышка; 15 - узел ротации кисти; 16 - накладка пальца из полиуретана; 17 - вставка из полиуретана повышенного трения; 18 - неподвижная ось; 19 - шайба подшипника; 20 - подшипник; 21 - межпальцевая втулка; 22 - подвижная ось; 23 - тяга искусственного I пальца; 24 - тяги искусственных II-V пальцев; 25 - гайка; 26 - ходовой винт; 27 - аккумуляторная батарея; 28 - кнопка включения; 29 - биометрические датчики; 30 - кнопка-индикатор заряда аккумулятора; 31 - заглушка механизма аварийного раскрытия кисти; 32 - винт крепления.
Искусственная биоэлектрическая кисть руки (фиг. 1, 2) включает в себя силовую раму (1), состоящую из фрезерованных алюминиевых нижнего подрамника (2) и верхнего подрамника (3), скрепленных с помощью переднего держателя мотор-редуктора (4) и заднего держателя мотор-редуктора (5) в единый силовой несущий конструктивный элемент, к которому крепятся искусственный I палец (6), искусственный II палец (7), искусственный III палец (8); искусственный IV палец (9), искусственный V палец (10), мотор-редуктор (11), плата управления (12), верхняя крышка (13), нижняя крышка (14), при этом задний держатель мотор-редуктора (5) представляет из себя цельнолитой пластмассовый элемент, к которому крепится узел ротации кисти (15).
Каждый искусственный I-V палец (6-10) представляет из себя двуплечий угловой рычаг. При этом на один конец упомянутых рычагов устанавливается накладка пальца из полиуретана (16), повторяющая форму соответствующего ей пальца, накладка пальца из полиуретана (16) в области подушечек пальцев имеет вставку из полиуретана повышенного трения (17).
Искусственные II-V пальцы (7-10) установлены на неподвижную ось (18), которая в свою очередь закреплена на верхнем подрамнике (3) и нижнем подрамнике (2), искусственный I палец (6) закреплен на верхнем подрамнике (3) через шайбу подшипника (19, фиг.3), позволяющую не касаться верхнего подрамника (3). В центр вращения каждого искусственного I-V пальца (6-10) впрессованы подшипники (20), позволяющие пальцам вращаться.
Искусственные II-V пальцы (7-10) расположены на неподвижной оси (18) на заданном с помощью межпальцевых втулок (21) расстоянии друг от друга, межпальцевые втулки (21) также осуществляют упор на подшипники (20) пальцев, не мешая их работе и маскируют внутри себя неподвижную ось (18), делая конструкцию более жесткой и прочной.
Второй конец вышеупомянутых рычагов искусственных I-V пальцев (6-10) соединен с подвижной осью (22) через подшипники (20). При этом второй конец рычага искусственного I пальца (6) соединен с подвижной осью (22) посредством тяги искусственного I пальца (23), при этом на подвижной оси (22) между искусственным III пальцем (8) и искусственным IV пальцем (9) для упрочнения конструкции установлена межпальцевая втулка (21). Подвижная ось (22) посредством двух тяг искусственных II-V пальцев (24) соединена с гайкой (25), имеющей четырехзаходную резьбу, установленной на ходовом винте (26), который в свою очередь закреплен на выходном валу мотор-редуктора. Данное техническое решение позволяет передавать большее усилие на сжатие пальцев, а также фиксирует хват после выключения мотор-редуктора (11).
Мотор-редуктор (11) крепится внутри силовой рамы (1) продольно в переднем держателе мотор-редуктора (4) и заднем держателе мотор-редуктора (5) через уплотнители (не показаны), выходным валом в направлении искусственных I-V пальцев (6-10).
Работа механизма искусственной биоэлектрической кисти руки осуществляется следующим образом: при включении аккумуляторной батареи (27) соответствующей кнопкой включения (28), расположенной на верхней крышке (13), происходит инициализация и диагностика платы управления (12), после чего искусственная биоэлектрическая кисть руки переходит в режим работы.
Сигналы с биометрических датчиков (29) поступают на плату управления (12), где происходит их обработка в соответствии с заданными параметрами алгоритма обработки. Измеренная величина электрического потенциала на поверхности культи пользователя фильтруется и усиливается платой управления (12) для пропорционального управления мощностью мотор-редуктора (11), реализующего хват/раскрытие.
При поступлении биоэлектрического сигнала управления искусственная биоэлектрическая кисть может работать в двух режимах: 1) выполнение раскрытия кисти (фиг. 3) при наличии соответствующего сигнала с датчика (29); 2) выполнение хвата кисти (фиг. 4) при наличии противоположного сигнала с другого датчика (29). При выполнении команды хвата или раскрытия кисти, в зависимости от посылаемого сигнала на плату управления (12) производится включение мотор-редуктора (11). Мотор-редуктор (11) вращает ходовой винт (26), который перемещает гайку (25). С помощью прикрепленных к гайке (25) двух тяг искусственных II-V пальцев (24) осуществляется хват/раскрытие кисти. Движение искусственных II-V пальцев (7-10) осуществлено за счет тяг искусственных II-V пальцев (24), а с помощью тяги искусственного I пальца (23) осуществлено движение искусственного I пальца (6).
Обратная связь с платой управления (12) в процессе выполнения хвата/раскрытия кисти обеспечивается ограничителями силы тока мотор-редуктора (11).
Через задний держатель мотор-редуктора (5) к силовой раме (1) крепится узел ротации кисти (15), позволяющий осуществлять вращение кистью на 180 градусов. К узлу ротации кисти (15) крепится культеприемник (не показан).
Искусственная биоэлектрическая кисть руки оснащена кнопкой-индикатором заряда аккумуляторной батареи (30), при нажатии на которую зажигается встроенный в кнопку-индикатор заряда аккумуляторной батареи (30) светодиод. Светодиод светится зеленым светом, в случае если заряд аккумуляторной батареи (27) достаточен, и красным светом, если заряд аккумуляторной батареи (27) составляет менее 20%, что говорит о необходимости поставить аккумуляторную батарею (27) на зарядку в ближайшее время. Светодиод гаснет самостоятельно спустя короткий промежуток времени. В случае если аккумуляторная батарея (27) все же разрядилась во время эксплуатации, хват кисти фиксируется. Если при этом кистью захвачен какой-либо предмет и его необходимо извлечь, то в нижней крышке (14) расположена заглушка механизма аварийного раскрытия кисти (31), находящаяся в районе искусственного I пальца (6). При удалении заглушки механизма аварийного раскрытия кисти (31) открывается доступ к винту крепления (32) тяги искусственного I пальца (23), который необходимо выкрутить, после чего искусственный I палец (6) будет свободно открываться.
Наличие несущей силовой рамы позволяет сделать конструкцию прочной и выдерживать ударные нагрузки. Расположенные внутри силовой рамы мотор-редуктор и механизм передачи усилия от мотор-редуктора к искусственным пальцам защищены силовой рамой от внешних ударных воздействий, а способ крепления искусственных пальцев к силовой раме позволяет тянуть и толкать искусственными пальцами различные массивные предметы, а также выдерживать различные ударные нагрузки по искусственным пальцам без существенных воздействий на механизм передачи усилия от мотор-редуктора к искусственным пальцам и сам мотор-редуктор, что способствует долгой и надежной работе механизмов. Стоящий продольно в силовой раме мотор-редуктор с расположенным по направлению к искусственным пальцам выходным валом позволяет не использовать тяжелые и громоздкие зубчатые колеса, оставив минимум полезных деталей для повышения надежности и простоты конструкции. Сокращение количества деталей, применение легких материалов, таких как алюминий и пластик, позволяет изготавливать протез компактным и легким, а также варьировать его размеры для применения пользователями всех половозростных групп. В случае необходимости, по решению врача, можно увеличить массу искусственной биоэлектрической кисти руки, как правило, чтобы предотвратить искривление позвоночника из-за разницы давлений на позвоночник слева и справа, присутствует возможность установить дополнительные грузы на нижний подрамник и/или верхний подрамник. Выполнение искусственных пальцев двусоставными из полиуретана и полиуретана повышенного трения позволяют хвату быть цепким. Наличие узла ротации, индикатора заряда аккумуляторной батареи и возможности самостоятельного аварийного раскрытия кисти позволяет сделать эксплуатацию искусственной биоэлектрической кисти руки более комфортной для пользователя.
Изобретение относится к медицине, а именно к искусственным биоэлектрическим кистям рук. Кисть содержит корпус, мотор-редуктор, искусственные I, II, III, IV, V пальцы, механизм передачи усилия от мотор-редуктора к искусственным I-V пальцам, узел искусственного запястья, силовую раму, состоящую из верхнего и нижнего подрамников, соединенных между собой передним и задним держателями мотор-редуктора, с установленными на нее искусственными I-V пальцами. Искусственные II-V пальцы установлены с возможностью вращения на неподвижную ось, которая закреплена между верхним и нижним подрамниками. Искусственный I палец установлен непосредственно на верхнем подрамнике. Искусственные I-V пальцы выполнены в виде двуплечих угловых рычагов, один конец которых повторяет форму соответствующего ему пальца. Форма искусственного пальца задается накладками из эластичного материала повышенного трения. Второй конец двуплечих угловых рычагов искусственных I-V пальцев соединен с подвижной осью. Второй конец двуплечего углового рычага искусственного I пальца соединен с подвижной осью посредством тяги, а подвижная ось посредством двух тяг соединена с гайкой, расположенной на ходовом винте, присоединенном к выходному валу мотор-редуктора. Мотор-редуктор закреплен в переднем и заднем держателях мотор-редуктора внутри силовой рамы выходным валом в направлении искусственных пальцев. Через задний держатель мотор-редуктора к силовой раме прикреплен узел ротации кисти. Достигается повышение прочности конструкции, ее упрощение и повышение цепкости хвата. 8 з.п. ф-лы., 4 ил.
1. Искусственная биоэлектрическая кисть руки, содержащая корпус, мотор-редуктор, искусственные I, II, III, IV, V пальцы, механизм передачи усилия от мотор-редуктора к искусственным I-V пальцам, узел искусственного запястья, отличающаяся тем, что содержит силовую раму, состоящую из верхнего и нижнего подрамников, соединенных между собой передним и задним держателями мотор-редуктора, с установленными на нее искусственными I-V пальцами, при этом искусственные II-V пальцы установлены с возможностью вращения на неподвижную ось, которая закреплена между верхним и нижним подрамниками, а искусственный I палец установлен непосредственно на верхнем подрамнике, причем искусственные I-V пальцы выполнены в виде двуплечих угловых рычагов, один конец которых повторяет форму соответствующего ему пальца, при этом форма искусственного пальца задается накладками из эластичного материала повышенного трения, второй конец двуплечих угловых рычагов искусственных I-V пальцев соединен с подвижной осью, причем второй конец двуплечего углового рычага искусственного I пальца соединен с подвижной осью посредством тяги, а подвижная ось посредством двух тяг соединена с гайкой, расположенной на ходовом винте, присоединенном к выходному валу мотор-редуктора, при этом мотор-редуктор закреплен в переднем и заднем держателях мотор-редуктора внутри силовой рамы выходным валом в направлении искусственных пальцев, при этом через задний держатель мотор-редуктора к силовой раме прикреплен узел ротации кисти.
2. Искусственная биоэлектрическая кисть руки по п. 1, отличающаяся тем, что искусственные II-V пальцы расположены на неподвижной оси на заданном друг от друга расстоянии с помощью межпальцевых втулок, установленных на неподвижную ось между упомянутыми пальцами, при этом упомянутые пальцы жестко соединены между собой на неподвижной оси и двигаются одновременно.
3. Искусственная биоэлектрическая кисть руки по п. 1, отличающаяся тем, что искусственные I-V пальцы установлены на неподвижные оси с возможностью вращения через подшипники.
4. Искусственная биоэлектрическая кисть руки по п. 1, отличающаяся тем, что двуплечие угловые рычаги искусственных I-V пальцев выполнены в виде цельнометаллических деталей.
5. Искусственная биоэлектрическая кисть руки по п. 1, отличающаяся тем, что верхний и нижний подрамники выполнены из алюминия.
6. Искусственная биоэлектрическая кисть руки по п. 1, отличаеющаяся тем, что накладки из эластичного материала повышенного трения выполнены из полиуретана с вставками на уровне подушечек пальцев из полиуретана повышенного трения.
7. Искусственная биоэлектрическая кисть руки по п. 1, отличающаяся тем, что узел ротации выполнен с возможность вращения кистью на 180 градусов вдоль оси искусственной биоэлектрической кисти руки.
8. Искусственная биоэлектрическая кисть руки по п. 1, отличающаяся тем, что снабжена кнопкой-индикатором заряда аккумуляторной батареи.
9. Искусственная биоэлектрическая кисть руки по п. 1, отличающаяся тем, что снабжена механизмом аварийного раскрытия кисти.
| US 8021435 B2, 20.09.2011 | |||
| УСТРОЙСТВО для ДИСТАНЦИОННОГО КОНТРОЛЯРАБОТЫ и | 0 |
|
SU189912A1 |
| МЕХАНИЗМ СХВАТА ДЕТСКОГО ОДНОСХВАТОВОГО БИОЭЛЕКТРИЧЕСКОГО ПРОТЕЗА ВЕРХНЕЙ КОНЕЧНОСТИ | 2019 |
|
RU2719658C1 |
| US 4409529 A1, 11.10.1983 | |||
| Электромеханическая кисть | 2017 |
|
RU2663941C1 |

