Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления для управления съёмкой в устройстве съёмки изображений, к способу управления этим устройством и к программе.
Уровень техники
[0002] Обычно в случае, когда съёмка целевого объекта съёмки в устройстве съёмки изображений, например в камере наблюдения, выполняется путем выдачи команды посредством дистанционной операции, можно указывать условия съёмки изображений, например ориентацию, в которой снимает устройство съёмки изображений, увеличение/уменьшение масштаба или т.п., посредством блока ввода команд, например джойстика. Однако одновременное выполнение операций по выдаче команд для угла обзора и направления съёмки у камеры наблюдения посредством джойстика наряду с наблюдением монитора, отображающего снятое изображение, требует квалификации.
[0003] Также предложено выполнение команд, например, для масштабирования изображения в цифровой камере, мобильном терминале или т.п., когда изображение отображается на имеющемся в них мониторе. В качестве документов, раскрывающих такую методику, приведены патентная публикация Японии № 2004-157869 (далее называемая документом 1) и патентная публикация Японии № 2004-32524 (далее называемая документом 2).
[0004] Также в устройстве съёмки изображений, которое передает изображение, снятое устройством съёмки изображений, приемному устройству, например мобильному терминалу, который является клиентским устройством, реализуется группа команд для поддержки запроса возможностей, которые есть у устройства съёмки изображений, изменения настроек, изменения угла обзора, запуска распространения изображения или т.п., от внешнего устройства, например мобильного терминала. В последние годы в качестве примера такой группы команд известно нечто вроде заданного спецификацией, принятой ONVIF (Открытый форум по сетевым видеоинтерфейсам).
[0005] В документе 1 предложено отображение указываемой области масштабирования на экране и выполнение увеличенного отображения области масштабирования для всего экрана. Также в документе 2 предложен интерфейс пользователя, в котором в случае, когда угол обзора является заданным, и снятое изображение изменяется удаленной стороной, отображается рамка, представляющая заданный угол обзора, и можно подтвердить фотографируемый объект в пределах угла обзора наряду с наблюдением состояния окружения.
[0006] Однако не раскрыто, что указывается интересующая часть в снятом изображении, и угол обзора камеры управляется в соответствии со способом ввода команды. Также, когда выполняется управление масштабированием камеры для удаленной стороны, нельзя доступно обозначить соотношение изображения текущего угла обзора и угла обзора стороны уменьшенного масштаба. Также оператор просто выполняет управление для стороны уменьшенного масштаба посредством команды в отношении изображении, и в результате оператору трудно заранее понять, как будет выглядеть изображение.
Раскрытие изобретения
[0007] Настоящее изобретение было создано для решения вышеописанных проблем. Настоящее изобретение обеспечивает устройство управления, для которого просто задавать условие съёмки изображения и с помощью которого можно без труда понимать состояние снятого изображения, способ управления этим устройством и программу.
[0008] В соответствии с первым аспектом настоящего изобретения предложено устройство управления, которое управляет съёмкой в устройстве съёмки изображений, при этом устройство управления содержит: средство определения для определения команды либо управления по увеличению масштаба, либо управления по уменьшению масштаба для устройства съёмки изображений на основании взаимного расположения первой координаты и второй координаты, указанных относительно изображения от устройства съёмки изображений, отображенного на блоке отображения; и средство управления для управления устройством съёмки изображений на основе результата определения первой координаты и второй координаты средством определения.
[0009] В соответствии со вторым аспектом настоящего изобретения предложено устройство управления, которое управляет съёмкой в устройстве съёмки изображений, при этом устройство управления содержит: средство определения для определения команды либо управления по увеличению масштаба, либо управления по уменьшению масштаба для устройства съёмки изображений на основе взаимного расположения первой координаты и второй координаты, указанных относительно изображения от устройства съёмки изображений, отображенного на блоке отображения; и средство управления для выполнения управления по уменьшению масштаба для устройства съёмки изображений на заданную величину масштабирования в случае, когда результатом определения посредством средства определения является команда управления по уменьшению масштаба.
[0010] В соответствии с третьим аспектом настоящего изобретения предложен способ управления устройством управления, которое управляет съёмкой в устройстве съёмки изображений, при этом способ содержит: определение команды либо управления по увеличению масштаба, либо управления по уменьшению масштаба для устройства съёмки изображений на основе взаимного расположения первой координаты и второй координаты, указанных относительно изображения от устройства съёмки изображений, указанного на блоке отображения; и управление устройством съёмки изображений на основе результата определения, первой координаты и второй координаты в случае, когда определяется, что результат определения указывает на команду управления по уменьшению масштаба.
[0011] В соответствии с четвертым аспектом настоящего изобретения предложено устройство управления, которое управляет съёмкой в устройстве съёмки изображений, при этом устройство управления содержит: средство приема для приема первой координаты и второй координаты, обозначенных относительно изображения от устройства съёмки изображений, отображенного на блоке отображения; и средство управления для управления устройством съёмки изображений, чтобы область, заданная первой координатой и второй координатой, обозначенных относительно изображения от устройства съёмки изображений, отображенного на блоке отображения, соответствовала текущему углу обзора у устройства съёмки изображений.
[0012] Посредством настоящего изобретения можно легко задавать условие съёмки изображения и легко понимать состояние снятого изображения.
[0013] Дополнительные признаки настоящего изобретения станут очевидными из нижеследующего описания примерных вариантов осуществления (со ссылкой на приложенные чертежи).
Краткое описание чертежей
[0014] Фиг. 1 - схема функциональной конфигурации системы управления камерой.
Фиг. 2 - схема аппаратной конфигурации системы управления камерой.
Фиг. 3A - изображение для иллюстрации интерфейса пользователя.
Фиг. 3B - изображение для иллюстрации интерфейса пользователя.
Фиг. 3C - изображение для иллюстрации интерфейса пользователя.
Фиг. 3D - изображение для иллюстрации интерфейса пользователя.
Фиг. 4 - блок-схема алгоритма.
Фиг. 5A - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 5B - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 5C - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 5D - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 6 - блок-схема алгоритма.
Фиг. 7A - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 7B - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 7C - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 7D - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 7E - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 8 - блок-схема алгоритма.
Фиг. 9A - изображение для иллюстрации интерфейса пользователя.
Фиг. 9B - изображение для иллюстрации интерфейса пользователя.
Фиг. 9C - изображение для иллюстрации интерфейса пользователя.
Фиг. 9D - изображение для иллюстрации интерфейса пользователя.
Фиг. 10 - схема последовательности для команд между сетевой камерой и терминалом наблюдателя.
Фиг. 11 - изображение для иллюстрации координат отображения у экрана съёмки сетевой камеры.
Фиг. 12 - блок-схема алгоритма для обработки приема команды BoxZoom у сетевой камеры.
Фиг. 13 - изображение для иллюстрации координат отображения у экрана съёмки сетевой камеры.
Фиг. 14 - изображение для иллюстрации конфигурации параметров, которые хранит сетевая камера.
Фиг. 15A - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 15B - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 15C - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 15D - изображение для иллюстрации интерфейса пользователя со стороны терминала наблюдателя.
Фиг. 16 - блок-схема со стороны терминала наблюдателя.
Фиг. 17 - изображение для объяснения примера управления по уменьшению масштаба сетевой камеры.
Осуществление изобретения
[0015] Теперь будут подробно описаны варианты осуществления настоящего изобретения с использованием чертежей.
[0016] <Первый вариант осуществления>
Фиг. 1 - схема функциональной конфигурации системы управления камерой.
[0017] На фиг. 1 в системе управления камерой содержится терминал 101 наблюдателя и сетевая камера 103, которые подключаются друг к другу посредством сети 102. Терминал 101 наблюдателя является устройством обработки информации, которое является устройством управления, которое обеспечивает интерфейс пользователя для отображения изображения, которое снимает сетевая камера 103, и указания условия съёмки изображения, при котором снимает сетевая камера 103. Сеть 102 является линией связи, по которой возможна основанная на IP связь, например LAN, Интернет или т.п. Для сети 102 реализуется линия связи вида, который необходим в соответствии с чьей-то целью и намерением, и вид может быть проводным или беспроводным. Сетевая камера 103 снимает прямое изображение в соответствии с обозначенными условиями съёмки изображений и допускает распространение прямого изображения по сети 102.
[0018] Сетевая камера 103 содержит блок 104 съёмки, блок 105 управления и блок 106 связи.
[0019] Блок 104 съёмки выполнен как одно целое с сетевой камерой 103 и является устройством съёмки для получения прямого изображения. В блоке 104 съёмки, например, можно получить динамическое изображение 30 кадр/с путем получения изображений для 30 кадров за одну секунду. В настоящем варианте осуществления блок 104 съёмки обеспечивает (кодирующую) функцию для преобразования полученного видеоизображения в цифровые данные изображения, которые можно распространять по сети, например JPEG. При объяснении в дальнейшем «прямое изображение» или «данные изображения» объясняются как цифровые данные изображения, сформированные блоком 104 съёмки.
[0020] Блок 105 управления в соответствии с командой пользователя регулирует условие съёмки изображения, например, угол обзора или направление съёмки у сетевой камеры 103, количество кадров за 1 секунду, тип получаемого изображения или т.п. Команда пользователя может выполняться с терминала 101 наблюдателя по сети 102 или может выполняться непосредственно консольным терминалом, подключенным к сетевой камере 103. Также регулировка условия съёмки изображения блоком 105 управления может выполняться в соответствии со значением установки, заранее сохраненным в сетевой камере 103.
[0021] Блок 106 связи передает по сети 102 данные изображения, которые получает блок 104 съёмки, устройству обработки информации (например, терминалу 101 наблюдателя, который является клиентом, сервером записи или т.п.). Также блок 106 связи принимает информацию об установке для управления блоком 104 съёмки, заданную устройством обработки информации, и тогда блок 105 управления управляет работой сетевой камеры 103 в соответствии с той информацией об установке.
[0022] Терминал 101 наблюдателя содержит блок 110 связи, блок 111 отображения, блок 112 ввода, блок 113 установки рамки, блок 114 управления отображением и блок 115 управления съёмкой.
[0023] Блок 110 связи принимает данные изображения, переданные с сетевой камеры 103. Также блок 110 связи передает сетевой камере 103 информацию об установке, управляющую информацию или т.п., которую задает пользователь с использованием терминала 101 наблюдателя.
[0024] Блок 111 отображения отображает данные изображения, распространяемые с сетевой камеры 103. Блок 112 ввода обозначает область, в которой нужно выполнить увеличение масштаба на изображении, и обозначает часть в текущем изображении, которую нужно разместить в центре при уменьшении масштаба. Также блок 112 ввода выполняет ввод, чтобы изменить настройку сетевой камеры 103. В случае, когда подключается множество сетевых камер 103, блок 112 ввода выполняет ввод команды для отображения снятых изображений от этого множества на блоке 111 отображения на одном экране, и можно выбрать одну сетевую камеру и ввести команду для отображения снятых изображений на блоке 111 отображения.
[0025] Блок 113 установки рамки выполняет установку, необходимую для отображения рамки для указания интересующей области в снятом изображении из области, заданной блоком 112 ввода. Для этой установки, например, в качестве информации об установке включается вычисление координат положения, в котором нужно отобразить рамку на блоке 111 отображения. В настоящем варианте осуществления размер и форма рамки объясняются как задаваемые/отображаемые в виде прямоугольника, но можно применять многоугольные формы, отличные от прямоугольников.
[0026] Блок 114 управления отображением выполняет обработку для декодирования кодированных данных изображения, переданных от сетевой камеры 103, и выполняет управление для отображения изображения, экрана настройки или т.п., полученных путем декодирования, на блоке 111 отображения. Также блок 114 управления отображением способен выполнять управление для отображения изображения, отображенного в рамке, установленной блоком 113 установки рамки, с наложением на все изображение или на фрагмент изображения, отображенные на блоке 111 отображения.
[0027] Блок 115 управления съёмкой в соответствии с информацией об установке, заданной блоком 113 установки рамки, блоком 112 ввода или т.п., вычисляет условие съёмки изображения у сетевой камеры 103, которое включает в себя угол обзора, направление съёмки или т.п., и управляет съёмкой в сетевой камере 103 путем передачи сетевой камере 103 информации, указывающей вычисленное условие съёмки изображения. Отметим, что в этом вариант осуществления соотношение сторон рамки, заданной в соответствии с вводом от блока 112 ввода, не обязательно совпадает с соотношением сторон у изображения, отображенного блоком 111 отображения, или изображения, сформированного блоком 104 съёмки в сетевой камере 103. По этой причине блок 115 управления съёмкой вычисляет условие съёмки изображения (угол обзора, направление съёмки или т.п.) путем согласования соотношения сторон у изображения, отображенного блоком 111 отображения, или изображения, сформированного блоком 104 съёмки. Также блок 115 управления съёмкой способен указывать различные параметры управления для связи или т.п., количество кадров для каждой секунды, способ кодирования изображения у сетевой камеры 103 или т.п.
[0028] В сети 102 можно соединять по необходимости устройства обработки информации, например сервер записи, множество терминалов 101 наблюдателя или т.п.
[0029] Фиг. 2 - изображение для иллюстрации аппаратной конфигурации терминала 101 наблюдателя и сетевой камеры 103.
[0030] В терминале 101 наблюдателя CPU 201 выполняет централизованное управление терминалом 101 наблюдателя. CPU 201 обладает функцией выполнения обязанностей блока 114 управления отображением, блока 113 установки рамки и блока 115 управления съёмкой, проиллюстрированных на фиг. 1. Вспомогательное запоминающее устройство 202 хранит программу, чтобы CPU 201 управлял терминалом 101 наблюдателя. RAM 203 является запоминающим устройством, в которое загружается программа, которая считывается из вспомогательного запоминающего устройства 202, для исполнительной обработки. Также RAM 203 используется в качестве области хранения для временного хранения данных, которые являются целевым объектом различной обработки, как временное запоминающее устройство.
[0031] Сетевой интерфейс 204 является схемой, посредством которой выполняется связь по сети 102, и соответствует блоку 110 связи из фиг. 1. Сетевой интерфейс 204 используется, например, для приема данных изображения, информации об установке или т.п. от сетевой камеры 103 и для передачи информации об установке сетевой камере 103. Устройство 205 отображения является устройством отображения, например LCD, которое отображает данные изображения, рамку или т.п. и соответствует блоку 111 отображения из фиг. 1. Устройство 206 ввода является клавиатурой для ввода числовых значений, указательным устройством, например мышью, сенсорной панелью или т.п., для указания конкретного положения отображения области отображения на устройстве 205 отображения или т.п. и соответствует блоку 112 ввода из фиг. 1. В частности, поскольку для сенсорной панели устройство ввода содержится в устройстве отображения, указанная пальцем, пером или т.п. часть отображается устройством отображения «как есть», и поэтому основополагающим является оперативность, обзор и т.п.
[0032] Как описано выше, аппаратная конфигурация терминала 101 наблюдателя содержит элементы аппаратной конфигурации, аналогичные элементам аппаратной конфигурации, содержащимся в обычном ПК (персональный компьютер). По этой причине различные функции, осуществляемые терминалом 101 наблюдателя, можно реализовать в виде программного обеспечения, которое работает на обычном ПК.
[0033] В сетевой камере 103 CPU 210 является тем, что выполняет централизованное управление сетевой камерой 103, и соответствует блоку 105 управления из фиг. 1. ROM 211 хранит программу, чтобы CPU 210 управлял сетевой камерой 103. Здесь конфигурация может содержать вместо ROM 211 вспомогательное запоминающее устройство, эквивалентное вспомогательному запоминающему устройству 202 терминала 101 наблюдателя. RAM 212 является запоминающим устройством, в которое загружается программа, которая считывается из ROM 211, для выполнительной обработки. Также RAM 212 используется в качестве области хранения для временного хранения данных, которые являются целевым объектом различной обработки, как временное запоминающее устройство.
[0034] Сетевой интерфейс 213 является схемой, посредством которой выполняется связь по сети 102, и соответствует блоку 106 связи из фиг. 1. Сетевой интерфейс 213 используется, например, для приема данных изображения, информации об установке или т.п. от терминала 101 наблюдателя и для передачи информации об установке терминалу 101 наблюдателя. Устройство 214 съёмки изображений является устройством съёмки, содержащим датчик изображений для съёмки прямого изображения в виде динамического изображения или неподвижного изображения. Устройство 214 съёмки изображений может выполнять автоматическую регулировку условия съёмки изображения, например угла обзора, направления съёмки или т.п. Также устройство 214 съёмки изображений содержит механизмы панорамирования, наклона и масштабирования и выполняет операции панорамирования, наклона и масштабирования (управление по увеличению масштаба/управление по уменьшению масштаба) под управлением CPU 210. Устройство 214 съёмки изображений встраивается в корпус сетевой камеры 103.
[0035] Далее с использованием фиг. 3A - 3D приводится объяснение интерфейса пользователя терминала 101 наблюдателя. Отметим, что этот интерфейс пользователя является графическим интерфейсом пользователя для выполнения пользователем различных операций и формируется блоком 114 управления отображением в терминале 101 наблюдателя.
[0036] На фиг. 3A - 3D область 301 отображения является областью отображения устройства 205 отображения в терминале 101 наблюдателя. Для области 301 отображения можно использовать физический экран устройства 205 отображения в качестве области отображения, и можно реализовать одно окно в качестве области 301 отображения в среде, которая использует оконный GUI. Блок 302 отображения изображения с камеры является областью для отображения прямого изображения, которое распространяется с сетевой камеры 103.
[0037] Рамка 303 используется, когда изображение, отображенное в блоке 302 отображения изображения с камеры, определяется в соответствии с командой пользователя. Здесь рамка 303 имеет прямоугольную форму и определяется диагональной линией, которая соединяет первые координаты 304 и вторые координаты 305, которые обозначаются пользователем. Отметим, что хотя рамка 303 в варианте осуществления имеет прямоугольную форму, она также может иметь форму, содержащую искажение, и можно реализовать рамку, которая устанавливается в многоугольном формате помимо прямоугольника. То же самое можно сказать про рамки в нижеследующем втором варианте осуществления.
[0038] Используя фиг. 3A - 3D и блок-схему алгоритма из фиг. 4, приводится объяснение установки рамки 303 посредством терминала 101 наблюдателя и управления сетевой камерой 103. Отметим, что обработка из фиг. 4 осуществляется CPU 201 терминала 101 наблюдателя, выполняющим программу, считанную из RAM 203. Ниже приводится объяснение примера случая, в котором рамка 303 устанавливается мышью как устройством 206 ввода, которое является указательным устройством.
[0039] Прежде всего CPU 201 получает первые координаты 304, которые указывают положение команды операции нажатия, путем обнаружения операции нажатия мыши в блоке 302 отображения изображения с камеры (нажатие кнопки мыши) (этап S401). После этого CPU 201 получает вторые координаты 305, которые указывают положение команды мыши, которое изменилось в соответствии с перемещением мыши (этап S402). В частности, вторые координаты являются координатами, обозначаемыми после того, как обозначаются первые координаты. CPU 201 начинает отображение рамки 303, которая определяется первыми координатами 304 и вторыми координатами 305, в соответствии с получением вторых координат 305 (этап S403). CPU 201 контролирует перемещение мыши и определяет взаимное расположение между первыми координатами 304 и вторыми координатами 305, полученными из положений команды мыши (этап S404).
[0040] В результате определения, например в случае, когда вторые координаты 305 относительно первых координат 304 переместились в первом заданном направлении (например, справа налево по направлению панорамирования), как на фиг. 3A, CPU 201 определяет, что операцией мыши является команда управления по уменьшению масштаба. Точнее говоря, в случае, когда исходная точка предполагается верхним левым краем блока 302 отображения изображения с камеры, координата x из вторых координат 305, которая находится на горизонтальной оси, меньше координаты x из первых координат 304, и операция мыши определяется как команда управления по уменьшению масштаба для камеры. В таком случае CPU 201 отображает рамку 303, которая определяется первыми координатами 304 и вторыми координатами 305, и в соответствии с размером рамки 303 изменяет размер изображения, отображенного блоком 302 отображения изображения с камеры (масштабирование (увеличение/уменьшение)), и отображает его в рамке 303 (этап S405A).
[0041] Далее путем обнаружения операции нажатия мыши CPU 201 обнаруживает обозначение вторых координат 305 и определяет, завершены ли вторые координаты 305 (этап S406). Когда результатом определения является, что вторые координаты 305 не завершены (НЕТ на этапе S406), обработка возвращается к этапу S402. С другой стороны, когда вторые координаты 305 завершены (ДА на этапе S406), CPU 201 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, на основе размера и взаимного положения рамки 303 относительно блока 302 отображения с камеры и текущего угла обзора и направления линии визирования у сетевой камеры 103 (коэффициент масштабирования, фокусное расстояние), и управляет сетевой камерой 103 в соответствии с вычисленным условием съёмки изображения (этап S407). При этом управлении CPU 201 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, так что снятое изображение с сетевой камеры 103 становится изображением состояния, отображаемого в настоящее время в рамке 303, например, как на фиг. 3B. Другими словами, CPU 201 вычисляет угол обзора у сетевой камеры 103 (коэффициент масштабирования и направление съёмки), чтобы воспроизвести такое же состояние отображения, как изображение, отображенное в рамке 303 в момент времени, когда завершена установка рамки 303 (момент времени, когда завершены вторые координаты 305) (такое же положение и такой же размер), на изображении, отображенном в блоке 302 отображения изображения с камеры. Терминал 101 наблюдателя управляет вычисленным коэффициентом масштабирования и направлением съёмки путем выполнения команды по отношению к сетевой камере 103.
[0042] После этого CPU 201 убирает рамку 303 и в соответствии с командой отображает снятое изображение, принятое от сетевой камеры 103, в блоке 302 отображения изображения с камеры (этап S408). Отметим, что рамка 303 при управлении по уменьшению масштаба может быть конфигурацией для отображения изображения целевого объекта с наложением на изображение в блоке 302 отображения изображения с камеры, но может быть так, что явно определяется только рисунок рамки, чтобы улучшить обзор.
[0043] Между тем в случае, когда результатом определения с этапа S404 является то, что вторые координаты 305 переместились во втором заданном направлении относительно первых координат 304 (например, справа вниз), например, как на фиг. 3C, CPU 201 определяет, что операцией мыши является команда управления по увеличению масштаба. Точнее говоря, в случае, когда координата x из вторых координат 305 больше координаты x из первых координат 304, операция мыши определяется как команда управления по увеличению масштаба для камеры. В таком случае CPU 201 отображает только рамку 303, которая определяется первыми координатами 304 и вторыми координатами 305, для наложения на изображение, отображенное блоком 302 отображения изображения с камеры (этап S405B). Другими словами, CPU 201 отображает «как есть» фрагмент изображения от блока 302 отображения изображения с камеры в рамке 303.
[0044] Далее путем обнаружения операции нажатия мыши CPU 201 обнаруживает обозначение вторых координат 305 и завершает то положение в качестве вторых координат 305 (ДА на этапе S406). CPU 201 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, и управляет сетевой камерой 103 в соответствии с вычисленным условием съёмки изображения (этап S407). Пока снятое изображение, соответствующее этой команде, не будет принято от сетевой камеры 103, может выполняться электрически увеличенное отображение для отображаемого в настоящее время изображения. Затем, когда от сетевой камеры принимается снятое изображение, соответствующее этой команде, можно переключиться с изображения, для которого выполняется электрически увеличенное отображение, на принятое снятое изображение. При этом управлении CPU 201 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, так что снятое изображение с сетевой камеры 103 становится изображением в состоянии, отображенном в рамке 303, например, как на фиг. 3D, на основе размера и взаимного положения рамки 303 относительно блока 302 отображения с камеры, а также текущего направления линии визирования и угла обзора (коэффициент масштабирования, фокусное расстояние) у сетевой камеры 103. Терминал 101 наблюдателя управляет вычисленным коэффициентом масштабирования и направлением съёмки путем выполнения команды по отношению к сетевой камере 103. После этого CPU 201 убирает рамку 303 и отображает снятое изображение, принятое от сетевой камеры 103, в блоке 302 отображения изображения с камеры (этап S408).
[0045] В настоящем варианте осуществления приведено объяснение примера случая, в котором в качестве указательного устройства используется мышь, но это не является ограничением. Может использоваться любое устройство, если оно допускает указание первых координат 304 и вторых координат 305, которые указываются после первых координат по порядку, и если допускает установку рамки 303 в соответствии с координатами.
[0046] Также обозначение первых координат 304 и вторых координат 305 и перемещение может указываться перемещением самой мыши и нажатым состоянием кнопки мыши, но способ этого указания не ограничивается. Заданная операция может указывать обозначение первых координат 304 и вторых координат 305 и перемещение, например, посредством операции движения мыши с удержанием нажатого состояния кнопки мыши (операция перетаскивания).
[0047] Также, хотя определение управления по увеличению масштаба и управления по уменьшению масштаба в настоящем варианте осуществления выполняется путем обнаружения, что положение вторых координат 305 переместилось в любом направлении панорамирования (справа налево или слева направо) относительно положения первых координат 304 посредством операции с мышью, это не является ограничением. Например, может определяться, что перемещение из первых координат во вторые координаты происходит в направлении наклона (сверху вниз или снизу вверх). Точнее говоря, в случае, когда исходная точка предполагается верхним левым краем блока 302 отображения изображения с камеры, и определяется, что координата y из вторых координат 305, которая находится на вертикальной оси, больше координаты y из первых координат 304, операция мыши определяется как команда управления по уменьшению масштаба для камеры. Также в случае, когда определяется, что координата y из вторых координат 305 меньше координаты y из первых координат 304, операция мыши определяется как команда управления по увеличению масштаба для камеры.
[0048] Также перемещение из первых координат во вторые координаты для направления панорамирования и направления наклона можно сделать условием для определения, используемого при определении управления по увеличению масштаба и управления по уменьшению масштаба для камеры. Например, в случае, когда определяется перемещение из верхнего левого в нижний правый край, камерой можно управлять для уменьшения масштаба, а в случае, когда определяется перемещение из верхнего правого в нижний левый край, камерой можно управлять для увеличения масштаба.
[0049] Как объяснялось выше, посредством настоящего варианта осуществления можно определить, является ли управление углом обзора сетевой камеры управлением по уменьшению масштаба или управлением по увеличению масштаба, посредством взаимного расположения первых координат и вторых координат для задания рамки. Также в случае управления по уменьшению масштаба можно позволить пользователю легко понять, какой вид изображения можно получить, путем отображения в рамке состояния снятого изображения, отображенного в соответствии с управлением по уменьшению масштаба, для отображаемого в настоящее время снятого изображения при управлении по уменьшению масштаба.
[0050] Также можно вычислить условие съёмки изображения, включающее в себя направление съёмки, угол обзора или т.п. у сетевой камеры, в соответствии с операцией по отношению к рамке и дать команду управления сетевой камере в соответствии с тем условием съёмки изображения. По этой причине можно значительно повысить оперативность по сравнению с таковой у функционального блока, например джойстика, ползунка или т.п., который непосредственно задает направление съёмки, угол обзора или т.п. у сетевой камеры.
[0051] Таким образом, можно обеспечить интерфейс пользователя, посредством которого можно легко выполнять управление PTZ камерой (панорамирование-наклон-масштабирование) для увеличения масштаба и уменьшения масштаба путем воздействия на блок отображения, и с помощью которого можно интуитивно понять состояние отображения изображения после операции.
[0052] <Второй вариант осуществления>
Во втором варианте осуществления будет приведено объяснение работы в случае, когда устройством 205 отображения в терминале 101 наблюдателя является сенсорная панель. В таком случае пользователь имеет возможность управлять сетевой камерой 103 посредством пальца пользователя, указательного инструмента, например пера, или т.п. вместо операции с мышью в первом варианте осуществления.
[0053] Фиг. 5A-5D являются интерфейсами пользователя терминала 101 наблюдателя, и область 501 отображения, блок 502 отображения изображения с камеры и рамка 503 соответствуют области 301 отображения, блоку 302 отображения изображения с камеры и рамке 303 соответственно в интерфейсе пользователя из фиг. 3 в первом варианте осуществления.
[0054] Используя фиг. 5A-5D и блок-схему алгоритма из фиг. 6, приводится объяснение установки рамки 503 с помощью терминала 101 наблюдателя и управления сетевой камерой 103. Отметим, что обработка из фиг. 5A-5D осуществляется CPU 201 терминала 101 наблюдателя, выполняющим программу, считанную из RAM 203. Ниже приводится объяснение примера в случае, когда на рамку 503 воздействуют (операция скольжения) посредством пальца пользователя. Здесь операция скольжения является скольжением пальца, указательного инструмента или т.п. в конкретном направлении, не прерывая касание.
[0055] Прежде всего CPU 201 получает первые координаты 504, которые являются начальной точкой операции скольжения, путем обнаружения операции скольжения пальца в блоке 502 отображения изображения с камеры (этап S601). После этого CPU 201 получает вторые координаты, которые указывают положение команды от пальца, которое изменилось в соответствии с операцией скольжения (этап S602). CPU 201 начинает отображение рамки 503, которая определяется первыми координатами 504 и вторыми координатами 505, в соответствии с получением вторых координат 505 (этап S603). CPU 201 контролирует перемещение пальца и определяет взаимное расположение первых координат 504 и вторых координат 505, полученных из положений команды от пальцем (этап S604).
[0056] В случае, когда результатом определения является то, что вторые координаты 505 переместились в первом заданном направлении относительно первых координат 504 (например, из нижнего правого в верхний левый край), например, как на фиг. 5A, CPU 201 определяет, что операцией скольжения является команда управления по уменьшению масштаба. В таком случае CPU 201 подтверждает, находится ли направление съёмки, угол обзора или т.п. у сетевой камеры 103 после управления сетевой камерой 103, вычисленные на основе положения 503 рамки, заданной первыми координатами 504 и вторыми координатами 505, в области возможного перемещения/области видимости сетевой камеры 103 (этап S605A). В случае, когда они находятся в области возможного перемещения/области видимости сетевой камеры 103 (ДА на этапе S605A), CPU 201 отображает рамку 503, которая определяется первыми координатами 504 и вторыми координатами 505. Также CPU 201 отображает в рамке 503 путем изменения (масштабирования (увеличения/уменьшения)) размера изображения, отображенного блоком 502 отображения изображения с камеры, в соответствии с размером рамки 503 (этап S606A).
[0057] Между тем в случае, когда они выходят из области возможного перемещения/области видимости сетевой камеры 103 (НЕТ на этапе S605A), CPU 201 запрещает установку рамки 503 и выполняет отображение предупреждения (например, всплывающее окно), указывающее что-то в этом роде (этап S606B).
[0058] После этого CPU 201 определяет, что вторые координаты 505, которые указывал палец непосредственно перед окончанием операции скольжения, завершены в качестве конечной точки, когда CPU 201 по отрыву пальца от сенсорной панели обнаруживает окончание операции скольжения (ДА на этапе S607). Когда вторые координаты 505 не завершены (НЕТ на этапе S607), обработка возвращается к этапу S601. Между тем, когда вторые координаты 505 завершены (ДА на этапе S607), CPU 201 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, и дает команду сетевой камере 103 в соответствии с вычисленным условием съёмки изображения (этап S608). При этом управлении CPU 201, например, как на фиг. 5B, вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, так что изображение входит в состояние, в котором снятое изображение с сетевой камеры 103 отображается в рамке 503, которая окончательно задана. После этого CPU 201 убирает рамку 503 и отображает снятое изображение, принятое от сетевой камеры 103, в блоке 502 отображения изображения с камеры (этап S609).
[0059] Между тем в случае, когда результатом определения с этапа S604 является то, что вторые координаты 505 переместились во втором заданном направлении относительно первых координат 504 (например, из верхнего левого в нижний правый край), например, как на фиг. 5C, CPU 201 определяет, что операцией скольжения является команда управления по увеличению масштаба. В таком случае CPU 201 отображает только рамку 503, которая определяется первыми координатами 504 и вторыми координатами 505, для наложения на изображение, отображенное блоком 502 отображения изображения с камеры (этап S606C). Другими словами, CPU 201 отображает «как есть» фрагмент изображения от блока 502 отображения изображения с камеры в рамке 503.
[0060] Далее CPU 201 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, когда положение, которое указывал палец непосредственно перед окончанием операции скольжения, завершено в качестве вторых координат 505 (ДА на этапе S607). Затем CPU 201 дает команду сетевой камере 103 в соответствии с вычисленным условием съёмки изображения (этап S608). При этом управлении CPU 201 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, так что изображение входит в состояние, в котором снятое изображение с сетевой камеры 103 отображается в рамке 503, которая окончательно задана, например, как на фиг. 5D. После этого CPU 201 убирает рамку 503 и в соответствии с командой отображает снятое изображение, принятое от сетевой камеры 103, в блоке 502 отображения изображения с камеры (этап S609).
[0061] Во втором варианте осуществления приводится объяснение примера случая, в котором указание координат выполняется с использованием пальца на сенсорной панели, но это не является ограничением. Может использоваться любой указательный инструмент, если он допускает указание первых координат 504 и вторых координат 505, которые указываются после первых координат по порядку, и если допускает установку рамки 503 в соответствии с координатой.
[0062] Также обозначение первых координат 504 и вторых координат 505 на сенсорной панели, перемещение или т.п. может указываться посредством операции скольжения, но способ указания этим не ограничивается. Обозначение первых координат 504 и вторых координат 505, перемещение или т.п. можно указывать посредством заданной операции, например, выполнения касания пальцем два раза (двойное касание).
[0063] Также, хотя определение управления по увеличению масштаба и управления по уменьшению масштаба выполнялось посредством вышеописанной операции скольжения, это не является ограничением. В вышеприведенном описании управление по увеличению масштаба и управление по уменьшению масштаба определяются на основе направления перемещения вторых координат относительно первых координат, но они могут определяться просто по взаимному расположению первых координат и вторых координат. Например, в случае, когда верхний левый и нижний правый край рамки 503 задаются первыми координатами и вторыми координатами, определяется управление по увеличению масштаба, а в случае, когда нижний левый и верхний правый край задаются первыми координатами и вторыми координатами рамки 503, определяется управление по уменьшению масштаба.
[0064] Как объяснялось выше, посредством второго варианта осуществления посредством операции скольжения можно добиться такого же эффекта, как и в первом варианте осуществления.
[0065] Также путем вычисления угла обзора и направления съёмки после управления сетевой камерой при установке рамки и подтверждения, находятся ли они в области возможного перемещения сетевой камеры, находятся ли они в области видимости, обозначенной заранее, или т.п., можно подтвердить, следует ли управлять сетевой камерой в момент времени обозначения.
[0066] <Третий вариант осуществления>
В третьем варианте осуществления будет приведено объяснение работы в случае, когда панорамное изображение отображается за пределами рамки, когда рамка устанавливается во втором варианте осуществления.
[0067] Для этого терминал 101 наблюдателя управляет сетевой камерой 103, и заранее получаются изображения в области возможного перемещения (в области видимости), в которой возможна съёмка посредством сетевой камеры 103, меняющей направление съёмки. Расписанием этого получения может быть включение сетевой камеры 103, либо получение от сетевой камеры 103 может выполняться автоматически в установленное время или с установленными интервалами. Также терминал 101 наблюдателя формирует панорамное изображение, соответствующее изображениям всей области съёмки, которую может снимать сетевая камера 103, из полученных изображений и сохраняет его, например, во вспомогательном запоминающем устройстве 202.
[0068] Фиг. 7A-7E являются интерфейсами пользователя терминала 101 наблюдателя, и область 701 отображения, блок 702 отображения изображения с камеры и рамка 703 соответствуют области 301 отображения, блоку 302 отображения изображения с камеры и рамке 303 соответственно в интерфейсе пользователя из фиг. 3 в первом варианте осуществления. Здесь фиг. 7A иллюстрирует состояние отображения терминала 101 наблюдателя перед работой.
[0069] Используя фиг. 7A-7E и блок-схему алгоритма из фиг. 8, приводится объяснение установки рамки 703 посредством терминала 101 наблюдателя и управления сетевой камерой 103. Отметим, что обработка из фиг. 7A-7E осуществляется CPU 201 терминала 101 наблюдателя, выполняющим программу, считанную из RAM 203. Ниже приводится объяснение примера в случае, когда на рамку 503 воздействуют (операция касания) посредством пальца пользователя.
[0070] Прежде всего CPU 201 получает первые координаты 704 и вторые координаты 705 путем обнаружения практически одновременных касаний двумя пальцами в блоке 502 отображения изображения с камеры (этап S801 и этап S802). Отметим, что одновременные касаний могут быть практически одновременными; например, даже в случае, когда вторые координаты 705 обнаруживаются в пределах заданного количества времени от обнаружения первых координат 704, которое рассматривается как одновременное, это обнаруживается как одновременное касание.
[0071] Далее CPU 201 начинает отображение рамки 703, которая определяется первыми координатами 704 и вторыми координатами 705 (этап S803). CPU 201 определяет взаимное расположение между первыми координатами 704 и вторыми координатами 705, полученными из положений команды от пальцем (этап S804).
[0072] В случае, когда результатом определения является то, что между первыми координатами 704 и вторыми координатами 705 имеет место первое заданное взаимное расположение (например, сочетание верхнего правого и нижнего левого края (положительный наклон линии, включающей в себя первые координаты 704 и вторые координаты 705)), например, как на фиг. 7B, CPU 201 определяет, что это команда управления по уменьшению масштаба. В таком случае CPU 201 отображает рамку 703, которая определяется первыми координатами 704 и вторыми координатами 705, и в соответствии с размером рамки 703 изменяет размер прямого изображения, отображенного блоком 702 отображения изображения с камеры (уменьшение), и отображает его в рамке 703 (этап S805A). Также CPU 201 изменяет размер панорамного изображения, заранее сохраненного во вспомогательном запоминающем устройстве 202, в соответствии с размером рамки 703 и отображает его в блоке 702 отображения изображения с камеры за пределами рамки 703 (этап S806A).
[0073] Далее путем обнаружения по отрыву 2 пальцев от сенсорной панели, что операция касания заканчивается, CPU 201 обнаруживает положения, которые указывали 2 пальца непосредственно перед окончанием операции касания, и определяет, завершены ли первые координаты 704 и вторые координаты 705 (этап S807). Когда первые координаты 704 и вторые координаты 705 не завершены (НЕТ на этапе S807), обработка возвращается к этапу S801. Между тем, когда первые координаты 704 и вторые координаты 705 завершены (ДА на этапе S807), CPU 201 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, и дает команду сетевой камере 103 в соответствии с вычисленным условием съёмки изображения (этап S808). При этом управлении CPU 201 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, так что изображение входит в состояние, в котором снятое изображение с сетевой камеры 103 отображается в рамке 703, которая окончательно задана, например, как на фиг. 7C. После этого CPU 201 заканчивает отображение рамки 703, переключается с отображения панорамного изображения на снятое изображение, принятое от сетевой камеры 103, и отображает его блоку 502 отображения изображения с камеры (этап S809).
[0074] Между тем в случае, когда результатом определения с этапа S804 является то, что между первыми координатами 704 и вторыми координатами 705 имеет место второе заданное взаимное расположение (например, сочетание верхнего левого и нижнего правого края (отрицательный наклон линии, включающей в себя первые координаты 704 и вторые координаты 705)), например, как на фиг. 7D, CPU 201 определяет команду управления по увеличению масштаба. В таком случае CPU 201 отображает только рамку 703, которая определяется первыми координатами 704 и вторыми координатами 705, для наложения на изображение, отображенное блоком 702 отображения изображения с камеры (этап S805B). Другими словами, CPU 201 отображает «как есть» фрагмент изображения от блока 702 отображения изображения с камеры в рамке 703.
[0075] Далее путем обнаружения по отрыву 2 пальцев от сенсорной панели, что операция касания заканчивается, CPU 201 обнаруживает положения, которые указывали 2 пальца непосредственно перед окончанием операции касания, и завершает те положения в качестве первых координат 704 и вторых координат 705 (ДА на этапе S807). После этого CPU 201 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, и управляет сетевой камерой 103 в соответствии с вычисленным условием съёмки изображения (этап S808). При этом управлении условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, вычисляется так, что снятое изображение с сетевой камеры становится изображением в состоянии, отображенном в окончательно заданной рамке 703, как на фиг. 7E. После этого CPU 201 убирает рамку 703 и отображает снятое изображение, принятое от сетевой камеры 103, в блоке 702 отображения изображения с камеры (этап S809).
[0076] В третьем варианте осуществления первые координаты 704 и вторые координаты 705 на сенсорной панели указываются путем касания одновременно двух точек посредством пальцев, но это не является ограничением. Например, также можно взять такую конфигурацию, что первые координаты 704 и вторые координаты 705 указываются посредством операции скольжения, объединяясь со вторым вариантом осуществления, и выполняется увеличение или уменьшение либо перемещение самой рамки 703.
[0077] Также определение управления по увеличению масштаба и управления по уменьшению масштаба выполняется путем обнаружения, находятся ли первые координаты 704 и вторые координаты 705 от операций касания в двух точках в нескольких типах заданных взаимных расположений, но это не является ограничением. Здесь несколько типов заданных взаимных расположений относятся к тому, когда наклон отрезка прямой, соединяющего первые координаты 704 и вторые координаты 705, положительный, и когда он отрицательный. Условия определения, используемые для этого определения, могут быть противоположными этим заданным взаимным расположениям.
[0078] Как объяснялось выше, посредством третьего варианта осуществления в дополнение к эффекту, объясненному во втором варианте осуществления, легко понять состояние изображения после управления камерой, потому что изображение отображается за пределами рамки при управлении по уменьшению масштаба с использованием заранее сохраненного панорамного изображения, и можно предотвратить необходимость повторного выполнения операции после того, как камера перемещается на самом деле.
[0079] <Четвертый вариант осуществления>
В вышеописанных вариантах осуществления с первого по третий приводится объяснение обработки преимущественно на стороне терминала 101 наблюдателя, а ниже приводится объяснение коммуникационной обработки между терминалом 101 наблюдателя и сетевой камерой 103 и работы на стороне сетевой камеры 103. Точнее говоря, варианты осуществления с первого по третий являются вариантами осуществления, в которых сетевая камера 103 принимает информацию о первых координатах 904 и вторых координатах 905, обозначенных на стороне терминала 101 наблюдателя. Другими словами, это варианты осуществления, в которых сетевая камера 103 вычисляет условия съёмки изображений на основе первых координат 904 и вторых координат 905 и выполняет обязанность устройства управления.
[0080] В четвертом варианте осуществления, как и в первом варианте осуществления, CPU 201 получает первые координаты 904 путем обнаружения операции нажатия мыши в блоке 902 отображения изображения с камеры. После обнаружения указания первых координат CPU 201 получает вторые координаты 905, которые указывают положение команды от мыши, которое изменилось в соответствии с перемещением мыши. CPU 201 начинает отображение рамки 903, которая определяется первыми координатами 904 и вторыми координатами 905, в соответствии с получением вторых координат 905. CPU 201 контролирует перемещение мыши и определяет взаимное расположение первых координат 904 и вторых координат 905, полученных из положений команды от мыши.
[0081] В случае, когда результатом определения является то, что вторые координаты 905 располагаются в первом заданном направлении влево или книзу относительно первых координат 904, например, как на фиг. 9A, определяется управление по уменьшению масштаба, и в дополнение к отображению рамки 903 изменяется (уменьшается) размер изображения, отображенного блоком 902 отображения изображения с камеры, в соответствии с размером рамки 903 и выполняется отображение в рамке 903. На фиг. 9A иллюстрируется пример, в котором для рамки 903 выполняется уменьшенное отображение изображения, отображенного в блоке 902 отображения изображения с камеры.
[0082] Далее путем обнаружения операции нажатия мыши CPU 201 обнаруживает обозначение вторых координат 905 и определяет, завершены ли вторые координаты 905. В случае, когда результатом определения является то, что вторые координаты 905 завершены, CPU 201 передает сетевой камере 103 информацию о завершенных первых координатах 904 и вторых координатах 905 в виде команды BoxZoom, которая объясняется ниже.
[0083] CPU 210 на стороне сетевой камеры 103 определяет взаимное расположение первых координат 904 и вторых координат 905 в направлении панорамирования (горизонтальном направлении), например, аналогично CPU 201 в терминале 101 наблюдателя. В случае, когда результатом определения является то, что вторые координаты 905 располагаются с левой стороны относительно первых координат 904, это определяется как управление по уменьшению масштаба. CPU 210 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, и управляет устройством 214 съёмки изображений в соответствии с вычисленным условием съёмки изображения. При этом управлении CPU 210 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у устройства 214 съёмки изображений, так что изображение в состоянии, отображаемом в настоящее время в рамке 903, размещается в области рамки 903, как на фиг. 9B. Другими словами, CPU 210 вычисляет угол обзора и направление съёмки у сетевой камеры 103, чтобы воспроизвести такое же состояние отображения (такое же положение и такой же размер), как изображение, отображенное в рамке 903 в момент времени, когда была завершена установка рамки 903 (момент времени, когда завершены вторые координаты 905), на изображении, отображенном в блоке 902 отображения изображения с камеры.
[0084] Между тем в случае, как на фиг. 9C, где вторые координаты 905 располагаются во втором заданном направлении относительно первых координат 904 (например, справа или выше), CPU 201 определяет, что операцией мыши является команда управления по увеличению масштаба. В таком случае CPU 201 отображает только рамку 903, которая определяется первыми координатами 904 и вторыми координатами 905, для наложения на изображение, отображенное блоком 902 отображения изображения с камеры. Другими словами, CPU 201 отображает «как есть» фрагмент изображения от блока 902 отображения изображения с камеры в рамке 903.
[0085] Далее путем обнаружения операции нажатия мыши CPU 201 обнаруживает обозначение вторых координат 905 и завершает то положение в качестве вторых координат 905. В случае, когда вторые координаты 905 завершены, CPU 201 передает сетевой камере 103 информацию о завершенных первых координатах 904 и вторых координатах 905 в виде команды BoxZoom, которая объясняется ниже.
[0086] CPU 210 на стороне сетевой камеры вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у сетевой камеры 103, и управляет блоком 104 съёмки в соответствии с вычисленным условием съёмки изображения. При этом управлении CPU 210 вычисляет условие съёмки изображения, включающее в себя угол обзора и направление съёмки у устройства 214 съёмки изображений, так что снятое изображение с сетевой камеры 103 становится изображением в состоянии, которое отображается в настоящее время в рамке 903, например, как на фиг. 9D. Между тем CPU 201 на стороне терминала 101 наблюдателя убирает рамку 903 и отображает снятое изображение, принятое от сетевой камеры 103, в блоке 902 отображения изображения с камеры.
[0087] Продолжая, фиг. 10 иллюстрирует типичную последовательность команд BoxZoom, которая изменяет угол обзора и направление съёмки между терминалом 101 наблюдателя, который является клиентом, и сетевой камерой 103. Объясняемые здесь транзакции указывают пары из команды, переданной от терминала 101 наблюдателя сетевой камере 103, и ответа, который сетевая камера 103 возвращает в ответ терминалу 101 наблюдателя.
[0088] Транзакция 1200 является транзакцией команды Subscribe. В результате выполнения этой команды сетевая камера 103 передает терминалу 101 наблюдателя событие, которое произошло внутри.
[0089] Транзакция 1201 является транзакцией команды GetServiceCapabilities. Команда GetServiceCapabilities является командой, которая указывает сетевой камере 103 вернуть информацию о возможностях, иллюстрирующую функцию, которую поддерживает сетевая камера 103. В эту информацию о возможностях сетевая камера 103 включает функцию, которая вычисляет угол обзора и направление сетевой камеры 103 на основе первых координат и вторых координат, заданных в блоке отображения с камеры терминала 101 наблюдателя. Команда, соответствующая этой функции, называется командой BoxZoom, и как описано выше, в команду включается идентификационная информация (маркер BZC) и информация, связанная с первыми координатами и вторыми координатами. В дальнейшем BoxZoom, SetBoxZoom и SetBoxZoomConfiguration будут сокращены до BZ, SetBZ и SetBZC.
[0090] Транзакция 1202 является транзакцией команды GetBZC. С помощью этой команды терминал 101 наблюдателя получает список BZC, который хранит сетевая камера 103. В список BZC включаются такие установки, как результат сравнения размера первых координат и вторых координат, установка в отношении того, следует ли выполнять управление по отдалению или управление по увеличению масштаба в отношении угла обзора на основании результата определения направления перемещения, установка соотношения управления по уменьшению масштаба и управления по увеличению масштаба, установка в отношении способа вычисления для вычисления направления сетевой камеры (панорамирование, наклон) или т.п.
[0091] Транзакция 1203 является транзакцией команды SetBZC. С помощью этой команды сетевая камера 103 устанавливает различные параметры BZC. Команда ответа SetBZC, указывающая, что обновляется установка BZC, передается терминалу 101 наблюдателя. После того, как команда завершается, сетевая камера 103 передает событие уведомления о модификации BZC, чтобы уведомить терминал 101 наблюдателя о том, что в BZC было изменение.
[0092] Транзакция 1204 является транзакцией команды BoxZoom. С помощью этой команды терминал 101 наблюдателя передает сетевой камере 103 маркер BZC (идентификационную информацию), первые координаты (X1, Y1) и вторые координаты (X2, Y2) в виде команды BZ. Сетевая камера 103, приняв команду BZ, сохраняет маркер BZC, первые координаты и вторые координаты в RAM 212 и передает ответ BZ терминалу 101 наблюдателя.
[0093] Фиг. 11 отображает снятое изображение с сетевой камеры 103, которое отображается в блоке 902 отображения изображения с камеры терминала 101 наблюдателя в системе координат, заданной Onvif (Открытый форум по сетевым видеоинтерфейсам). В Onvif в качестве системы координат у области съёмки изображений координаты X распределяются в диапазоне от -1 до +1, и аналогичным образом координаты Y распределяются в диапазоне от -1 до +1. Используя фиг. 11, приводится объяснение примера системы координат из четвертого варианта осуществления, а контрольный расчет условия съёмки изображения объясняется посредством фиг. 9A-9D и фиг. 10.
[0094] В проиллюстрированной на фиг. 11 системе координат значения первых и вторых координат, обнаруженные терминалом 101 наблюдателя, сохраняются в RAM 203, а кроме того, терминал 101 наблюдателя передает сетевой камере 103 запрос BZ, включающий в себя команду BZ.
[0095] Объяснение обработки BZ у сетевой камеры 103 будет приведено с использованием блок-схемы алгоритма из фиг. 12. Отметим, что объясненная ниже обработка для вычисления угла обзора у сетевой камеры 103 с тем же успехом может применяться к вариантам осуществления с первого по третий. Также обработка из фиг. 12 осуществляется CPU 210 сетевой камеры 103, выполняющим программу, считанную из RAM 212.
[0096] На этапе S1500 CPU 210 сетевой камеры 103, который принял запрос BZ, сохраняет в RAM 212 маркер BZC, значения первых координат (X1, Y1) и значения вторых координат (X2, Y2), обозначенные командой BZ.
[0097] Далее на этапе S1501 CPU 210 вычисляет направление съёмки у сетевой камеры 103 из сохраненных значений первых координат (X1, Y1) и значений вторых координат (X2, Y2). Это арифметическое уравнение является следующим уравнением. Предполагая, что значениями 906 центральных координат направления съёмки после изменения являются (X3, Y3):
(X3, Y3)=((X1+X2)/2, (Y1+Y2))
Далее на этапе S1502 CPU 210 сохраняет в RAM 212 вычисленные значения 906 центральных координат (X3, Y3).
[0098] Далее на этапе S1503 CPU 210 определяет, является ли это командой управления по уменьшению масштаба или командой управления по увеличению масштаба, на основании связи размера (сравнения) между значениями первых координат (X1, Y1) и значениями вторых координат (X2, Y2). Здесь коэффициент масштабирования для управления углом обзора после изменения предполагается равным Z.
[0099] В случае, когда X1=X2, CPU 210 определяет, что отсутствует изменение коэффициента масштабирования угла обзора, сохраняет значение Z=1 в RAM 212, и обработка переходит к этапу S1507.
[0100] В случае, когда X1<X2, обработка переходит к этапу S1504, и CPU 210 определяет, что это - управление по увеличению масштаба, и вычисляет коэффициент масштабирования Z управления углом обзора, показанный следующим уравнением:
Z= |2/(X1-X2)|
Отметим, что | | являются арифметическими символами, указывающими абсолютное значение. Например, в случае, когда X1=-0,7 и X2=-0,2, Z=4, и управление предназначено для коэффициента масштабирования для увеличения масштаба 4x относительно текущего коэффициента масштабирования.
[0101] В случае, когда X1>X2, обработка переходит к этапу S1505, и CPU 210 определяет, что это - управление по уменьшению масштаба (уменьшение), и вычисляет коэффициент масштабирования для управления углом обзора, показанный следующим уравнением:
Здесь коэффициент масштабирования для управления углом обзора после изменения предполагается равным Z.
Z=|(X1-X2)/2|
Отметим, что | | являются арифметическими символами, указывающими абсолютное значение. Например, в случае, когда X1=-0,2 и X2=-0,7, Z=0,25, и управление предназначено для коэффициента масштабирования для уменьшения масштаба 0,25x относительно текущего коэффициента масштабирования.
[0102] Отметим, что на этапе S1505 вместо вышеописанной обработки управление по уменьшению масштаба для масштабирования, например, может выполняться следующим образом.
[0103] (A) Независимо от значений первых координат и значений вторых координат величина управления масштабированием (величина удаления) неизменна. Например, выполняется такое управление, как уменьшение фокусного расстояния с текущего фокусного расстояния до заданного расстояния (например, -20 мм).
[0104] (B) Независимо от значений первых координат и значений вторых координат выполняется управление для масштабирования до максимального уменьшения масштаба (широкоугольное положение).
[0105] (C) Величина управления масштабированием может определяться на основе соотношения размера блока 902 отображения изображения с камеры (области системы координат) и размера рамки 903, которая определяется значениями первых координат и значениями вторых координат, максимальной величиной масштабирования и текущей величиной масштабирования. Точнее говоря, получается соотношение размера блока 902 отображения изображения с камеры, который является областью съёмки изображений, и размера рамки 903 - например, отношение длины одной стороны прямоугольной рамки, полученной из разности между значением первой координаты и значением второй координаты, к области по оси X в системе координат. Например, предполагая, что значение первой координаты X1=-0,2, а значение второй координаты X2=-0,7, разность составляет 0,5. Область по оси x в системе координат составляет 2,0, поэтому соотношение размера области съёмки изображений и рамки 903 равно 0,4.
[0106] Тогда вычисленная величина масштабирования получается путем умножения разности между максимальной величиной масштабирования и текущей величиной масштабирования на соотношение размера блока 902 отображения изображения с камеры, который является областью съёмки изображений, и рамки 903. То есть, как показано на фиг. 17, управляемая величина масштабирования=(максимальная величина масштабирования - текущий величина масштабирования) × (соотношение размеров рамки 903 и блока 902 отображения изображения с камеры). В то же время, аналогично вышеописанному объяснению, ей управляют, чтобы центр обозначенной рамки стал центром области съёмки изображений (блока 902 отображения изображения с камеры) после изменения направления съёмки. Отметим, что в соответствии с запросом от терминала 101 наблюдателя CPU 210 может, например, переключить тип управления масштабированием в сторону уменьшенного масштаба для вышеупомянутых случаев (A) - (C).
[0107] Когда завершается вычисление коэффициента масштабирования для управления углом обзора, обработка переходит к этапу S1506, CPU 210 сохраняет коэффициент масштабирования для управления углом обзора в запоминающем устройстве блока 105 управления, и обработка переходит к этапу S1507.
[0108] На этапе S1507 CPU 210 определяет, находятся ли значения координат направления съёмки и масштабный коэффициент управления углом обзора, сохраненные в запоминающем устройстве блока 105 управления, в области возможного перемещения/видимости камеры. В случае, когда определяется, что они не находятся в области возможного перемещения/видимости камеры («НЕТ» на этапе S1507), обработка переходит к этапу S1508, и CPU 210 передает терминалу 101 наблюдателя Invalid (недопустимо) и завершает обработку команды BoxZoom.
[0109] С другой стороны, в случае, когда определяется нахождение в области возможного перемещения/видимости камеры («ДА» на этапе S1507), обработка переходит к этапу S1509, CPU 210 проводит панорамирование и наклон, чтобы центральная координата съёмки камеры стала значениями центральных координат (X3, Y3), сохраненными в запоминающем устройстве. Далее масштабирование сетевой камеры 103 приводится к коэффициенту масштабирования для управления углом обзора, сохраненному в запоминающем устройстве, и сетевая камера 103 управляется по указанному условию съёмки изображения посредством запроса команды BZ от терминала 101 наблюдателя. Далее на этапе S1510 CPU 210 возвращает терминалу 101 наблюдателя нормальный ответ. На этапе S1511 CPU 210 завершает обработку приема команды BZ.
[0110] Далее с использованием фиг. 13 приводится объяснение примера обработки в случае, когда X1=X2. На этапе S1503 в случае, когда X1=X2, CPU 210 определяет, что отсутствует изменение коэффициента масштабирования для угла обзора, и сохраняет значение Z=1 в RAM 212. Затем на этапе S1507 CPU 210 определяет нахождение в области возможного перемещения/видимости камеры. В случае, когда определение в отношении нахождения в области возможного перемещения/видимости камеры является отрицательным, CPU 210 на этапе S1508 передает терминалу 101 наблюдателя Invalid и завершает обработку команды BoxZoom.
[0111] С другой стороны, в случае, когда на этапе S1507 определяется нахождение в области возможного перемещения/видимости камеры, обработка переходит к этапу S1509, CPU 210 управляет направлением съёмки, чтобы центральные координаты устройства 214 съёмки изображений переместились из текущих (0,0) в (X3 (= X1), Y3). В то же время Y3 является средним значением координаты Y из первых и вторых координат. Далее на этапе S1510 CPU 210 возвращает терминалу 101 наблюдателя нормальный ответ. Затем на этапе S1511 CPU 210 завершает обработку приема команды BZ.
[0112] На фиг. 14 графически показана структура параметров, хранимых RAM 212 сетевой камеры 103 или вспомогательным запоминающим устройством (не показано) по четвертому варианту осуществления. На фиг. 14 MediaProfile 3000, 3001 и 3002 являются наборами параметров для ассоциации и хранения различных элементов настройки сетевой камеры 103. Ниже MediaProfile в некоторых случаях сокращённо упоминается как MP. Каждый из MP 3000, 3001 и 3002 хранит Profile Token (маркер профиля), который является ID (идентификатором) MP.
[0113] Также каждый из MP 3000, 3001 и 3002 хранит ссылки на различные элементы настройки. Эти различные элементы настройки включают в себя описанные позже VideoSourceConfiguration 3011 и VideoEncoderConfiguration 3020, 3021 и 3031. Ниже VideoSourceConfiguration в некоторых случаях сокращённо упоминается как VSC.
[0114] VS 3010 на фиг. 14 является совокупностью параметров, указывающих возможности одного устройства 214 съёмки изображений, которое содержит сетевая камера 103. Здесь VS 3010 включает в себя такие параметры, как VideoSourceToken, который является ID VS 3010, и разрешение, которое указывает разрешение изображения, которое может выводить блок 104 съёмки. VEC 3020 и 3021 являются совокупностями параметров для ассоциирования настройки кодера для кодирования данных изображения с MP.
[0115] Сетевая камера 103 кодирует снятое изображение, выведенное из блока 104 съёмки на основе содержимого VS и VSC, на основе VEC и распространяет результат терминалу 101 наблюдателя в виде данных изображения посредством блока 106 связи.
[0116] BZC 3030 и 3031 на фиг. 14 являются совокупностями параметров для ассоциации с MP настроек, относящихся к направлению съёмки сетевой камеры 103, управлению по увеличению масштаба и управлению по уменьшению масштаба. BZC включает в себя маркер BZC, который является ID BZC, значения первых и вторых координат и параметры для задания направления съёмки сетевой камеры, управления по увеличению масштаба и управления по уменьшению масштаба путем сравнения значений первых и вторых координат.
[0117] В четвертом варианте осуществления управление по увеличению масштаба выполняется в случае, когда вторая координата X (X2) больше первой координаты X (X1), то есть X1<X2, но можно задать управление по уменьшению масштаба с использованием настроек BZC.
[0118] Также в четвертом варианте осуществления приводилось объяснение примера, где не выполняется управление углом обзора (управление масштабированием), и только управление движением для координаты Y (наклон) выполняется в случае, когда первая координата X и вторая координата X равны, то есть X1=X2, но это не является ограничением. Например, можно ограничить управление направлением оси Y у устройства 214 съёмки изображений, принимая во внимание, что подходящие координаты не нужно устанавливать даже в случае, когда Y1≠Y2, когда X1=X2, путем установки BZC.
[0119] Отметим, что вышеописанный пример установки BZC - не более чем пример, и можно увеличивать или уменьшать наблюдаемую чувствительность путем задания коэффициента в арифметическом уравнении.
[0120] <Пятый вариант осуществления>
В этом пятом варианте осуществления будет приведено объяснение обработки для уведомления пользователя о том, как работала бы камера в случае, когда рамка завершена в текущем состоянии после установки рамки в первом - четвертом вариантах осуществления.
[0121] Обработка отображения терминалом 101 наблюдателя объясняется с использованием блок-схем алгоритмов на фиг. 15A-15D и фиг. 16.
[0122] Отметим, что в терминале 101 наблюдателя процедура, показанная на фиг. 16, осуществляется CPU 201, загружающим программу, сохраненную во вспомогательном запоминающем устройстве 202, в RAM 203 и выполняющим ее. В качестве альтернативы часть или вся обработка, показанная на фиг. 16, может выполняться аппаратными средствами, установленными в терминале 101 наблюдателя.
[0123] Фиг. 15A-15D являются примерами интерфейса пользователя терминала 101 наблюдателя, и область 1001 отображения, блок 1002 отображения изображения с камеры и рамка 1003 соответствуют области 301 отображения, блоку 302 отображения изображения с камеры и рамке 303 в интерфейсе пользователя на фиг. 3A-3D. Панорамное изображение отображается в блоке 1008 панорамного отображения. Панорамное изображение является изображением, созданным путем объединения изображений, снятых заранее множество раз путем изменения направления съёмки изображений у камеры. То есть пользователь с использованием панорамного изображения может подтвердить более широкую область, нежели при текущем угле обзора камеры. Рамка 1009 для указания, какую область в настоящее время снимает сетевая камера 103, отображается в блоке 1008 панорамного отображения. Приводится объяснение случая, где в настоящем варианте осуществления отображается панорамное изображение, но вариант осуществления этим не ограничивается. Рамка, указывающая область, в которой возможна съёмка изображения посредством камеры, меняющей направление съёмки изображений, может отображаться одна, без отображения панорамного изображения. Даже в такой конфигурации пользователь может распознать положение и размер области, в которой в настоящее время снимает камера, в пределах области, в которой возможна съёмка изображения, путем изменения направления съёмки изображений камеры.
[0124] На фиг. 16 получаются первые координаты и вторые координаты, заданные пользователем, выполняющим нажатие кнопки мыши (этап S1001, этап S1002). На основе полученных первых координат и вторых координат начинается установка рамки 1003 (этап S1003).
[0125] В то же время выполняется определение взаимного расположения полученных координат аналогично обработке, показанной в первом - четвертом вариантах осуществления (этап S1004). В случае, когда определяется управление по уменьшению масштаба, пиктограмма 1006 для команды управления по уменьшению масштаба отображается в блоке 1002 отображения изображения с камеры, как показано на фиг. 15A (этап S1005A). Также в случае, когда определяется управление по увеличению масштаба, пиктограмма 1007 для команды управления по увеличению масштаба отображается в блоке 1002 отображения изображения с камеры, как показано на фиг. 15C (этап S1005B). Таким образом, с помощью отображения пиктограммы в случае, когда текущая рамка завершена, пользователь может распознать, выполняется ли на камере управление по уменьшению масштаба или управление по увеличению масштаба .
[0126] Например, когда вторые координаты обозначаются выше и левее либо ниже и левее первой координаты, определяется выполнение управления по уменьшению масштаба. В таком случае CPU 201 отображает на экране операции пиктограмму 1006 для указания, что выполняется управление по уменьшению масштаба.
[0127] Например, когда вторые координаты обозначаются ниже и правее либо выше и правее первой координаты, определяется выполнение управления по увеличению масштаба. В таком случае CPU 201 отображает на экране операции пиктограмму 1007 для указания, что выполняется управление по увеличению масштаба. Аналогично случаю управления по уменьшению масштаба, эта пиктограмма 1007 может отображаться на снятом изображении. Эта пиктограмма может отображаться на снятом изображении, как показано на фиг. 15C, но это не является ограничением.
[0128] Таким образом, управление для переключения пиктограммы, отображенной на экране операции, выполняется в соответствии со взаимным расположением первых координат и вторых координат.
[0129] Также пиктограмма может отображаться в рамке 1003 и может отображаться только в случае, когда размер рамки 1003 больше либо равен постоянному размеру, чтобы не препятствовать операции установки рамки.
[0130] Другими словами, в случае, когда обозначенная первыми координатами и вторыми координатами область больше заданного размера, пиктограмма отображается в обозначенной области (в рамке 1003). С другой стороны, в случае, когда обозначенный первыми координатами и вторыми координатами диапазон меньше заданного размера, можно отобразить пиктограмму за пределами обозначенной области.
[0131] Отметим, что то, больше ли обозначенная первыми координатами и вторыми координатами область, чем заданный размер, может определяться, например, площадью выбранной области либо длиной отрезка прямой, соединяющего первую координату и вторую координату. То есть в случае, когда площадь выбранной области больше заданной площади, или в случае, когда длина отрезка прямой, соединяющего первую координату и вторую координату, больше заданной длины, можно определить, что выбранная область больше заданного размера.
[0132] В качестве альтернативы можно взять такую конфигурацию, что пиктограмма не отображается в случае, когда установка рамки выполняется снова после того, как управление камерой выполнено один раз. Также пиктограммы не ограничиваются 2 типами для управления по уменьшению масштаба и управления по увеличению масштаба; в случае, когда положение после установки в рамке находится за пределами области съёмки камеры, может отображаться другая пиктограмма. Кроме того, уведомление с использованием пиктограмм не является ограничением; уведомление может выполняться некоторым способом различения того, является ли это управлением по уменьшению масштаба или управлением по увеличению масштаба, например, сообщением или изменением способа отображения рамки. Например, цвет рамки 1003, указывающий область, обозначенную первыми координатами и вторыми координатами, может изменяться в соответствии со взаимным расположением первых координат и вторых координат. То есть можно сделать цвет рамки различным для случая, когда взаимное расположение первых координат и вторых координат является взаимным расположением для команды управления по уменьшению масштаба, и случаем, когда взаимное расположение предназначено для команды управления по увеличению масштаба.
[0133] Далее в случае, когда устанавливается положение рамки, в блоке 1008 панорамного отображения отображается рамка 1010 для указания, какую область снимает камера (этап S1006). Отметим, что положение и размер рамки положения после перемещения можно изменять в реальном масштабе времени в соответствии с перемещением второй координаты еще до завершения положения рамки.
[0134] На фиг. 15A выполняется управление по уменьшению масштаба, поэтому рамка 1010 для указания угла обзора после управления по уменьшению масштаба становится больше, чем рамка для показа текущего угла обзора. Также на фиг. 15C выполняется управление по увеличению масштаба, поэтому рамка 1010 для указания угла обзора после управления по увеличению масштаба становится меньше, чем рамка 1009 для показа текущего угла обзора. Таким образом, с помощью отображения рамки 1010 для указания угла обзора после управления и рамки 910 для показа текущего угла обзора пользователь может распознать, как управляется угол обзора камеры.
[0135] После этого, когда первые координаты и вторые координаты завершены (этап S1007), угол обзора и направление съёмки сетевой камеры 103 вычисляются на основе завершенных координат, и дается команда сетевой камере (этап S1008).
[0136] Затем изображение с камеры отображается в блоке отображения изображения, удаляя только отображение рамок 1009 и 1010 (этап S1009). Изображение как на фиг. 15B отображается в качестве результата обозначения координат, показанного на фиг. 15A, а изображение как на фиг. 15D отображается в качестве результата обозначения координат, показанного на фиг. 15C.
[0137] Как объяснялось выше, в соответствии с терминалом наблюдателя в настоящем варианте осуществления легко представить себе состояние изображения после управления камерой и легко управлять камерой, как и было предсказано.
[0138] <Промышленная применимость>
Интерфейс пользователя терминала наблюдателя подходит к случаю, когда выполняется регулирование камеры наблюдения с использованием изображения.
[0139] Другие варианты осуществления
Вариант (варианты) осуществления настоящего изобретения также можно осуществить посредством компьютера в системе или устройстве, которые считывают и выполняют машиноисполняемые команды (например, одну или более программ), сохранённые на носителе (который также может полнее называться «постоянным машиночитаемым носителем»), для выполнения функций одного или более вышеописанных вариантов осуществления, и/или который включает в себя одну или более схем (например, специализированная интегральная схема (ASIC)) для выполнения функций одного или более вышеописанных вариантов осуществления, и посредством способа, выполняемого компьютером в системе или устройстве, например, путем считывания и выполнения машиноисполняемых команд с носителя для выполнения функций одного или более вышеописанных вариантов осуществления и/или управления одной или более схемами для выполнения функций одного или более вышеописанных вариантов осуществления. Компьютер может содержать один или более процессоров (например, центральный процессор (CPU), микропроцессор (MPU)) и может включать в себя сеть отдельных компьютеров или отдельных процессоров для считывания и выполнения выполняемых компьютером команд. Выполняемые компьютером команды могут вводиться в компьютер, например, из сети или с носителя информации. Носитель может включать в себя, например, одно или более из жесткого диска, оперативного запоминающего устройства (RAM), постоянного запоминающего устройства (ROM), хранилища распределенных вычислительных систем, оптического диска (например, компакт-диска (CD), цифрового универсального диска (DVD) или диска Blu-ray (BD)™), флэш-памяти, карты памяти и т.п.
[0140] При том, что настоящее изобретение описано со ссылкой на примерные варианты осуществления, нужно понимать, что изобретение не ограничивается раскрытыми примерными вариантами осуществления. Объем нижеследующей формулы изобретения должен соответствовать самой широкой интерпретации, включающей в себя все такие модификации и эквивалентные конструкции и функции.
[0141] По настоящей заявке испрашивается приоритет на основании заявки на патент Японии № 2014-209397, поданной 10 октября 2014 г., и № 2014-234911, поданной 19 ноября 2014 г., которые настоящим полностью включены в этот документ путём ссылки.
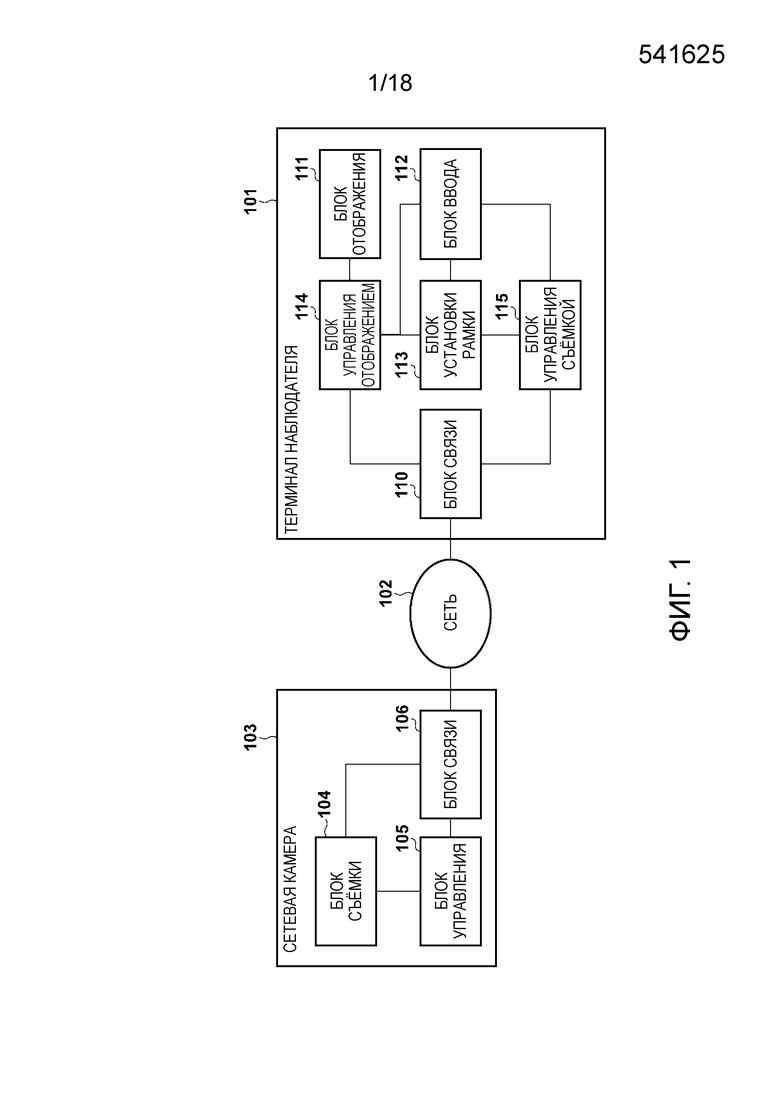
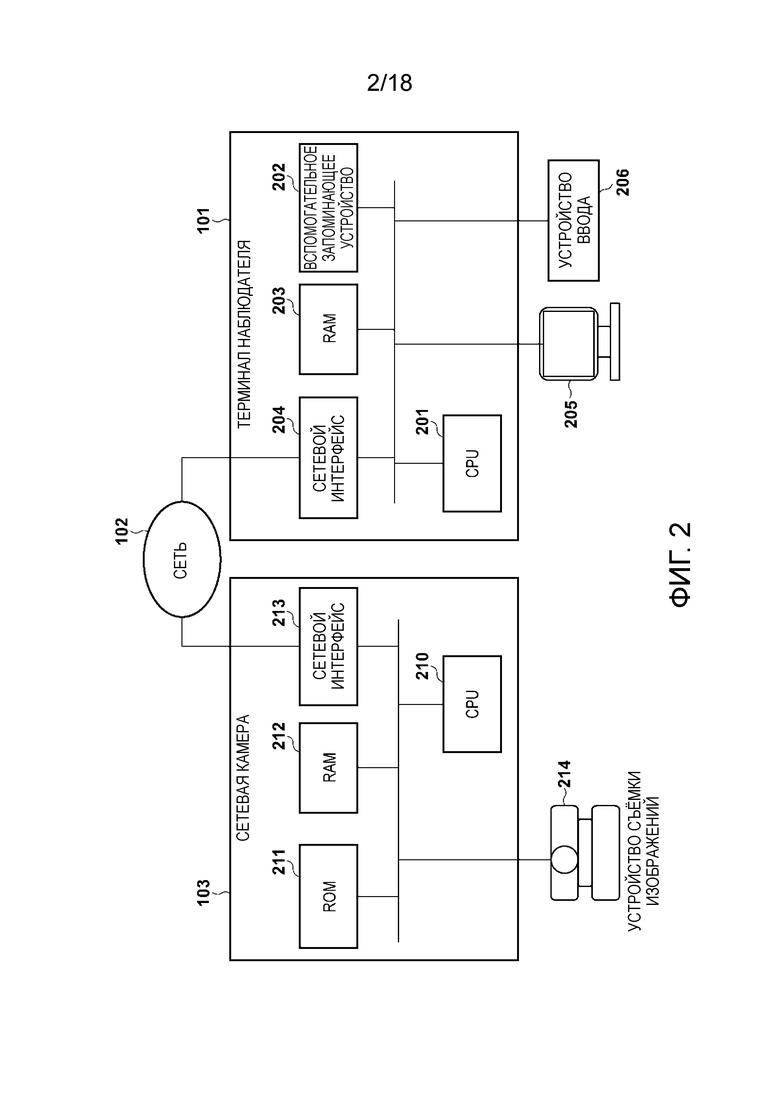







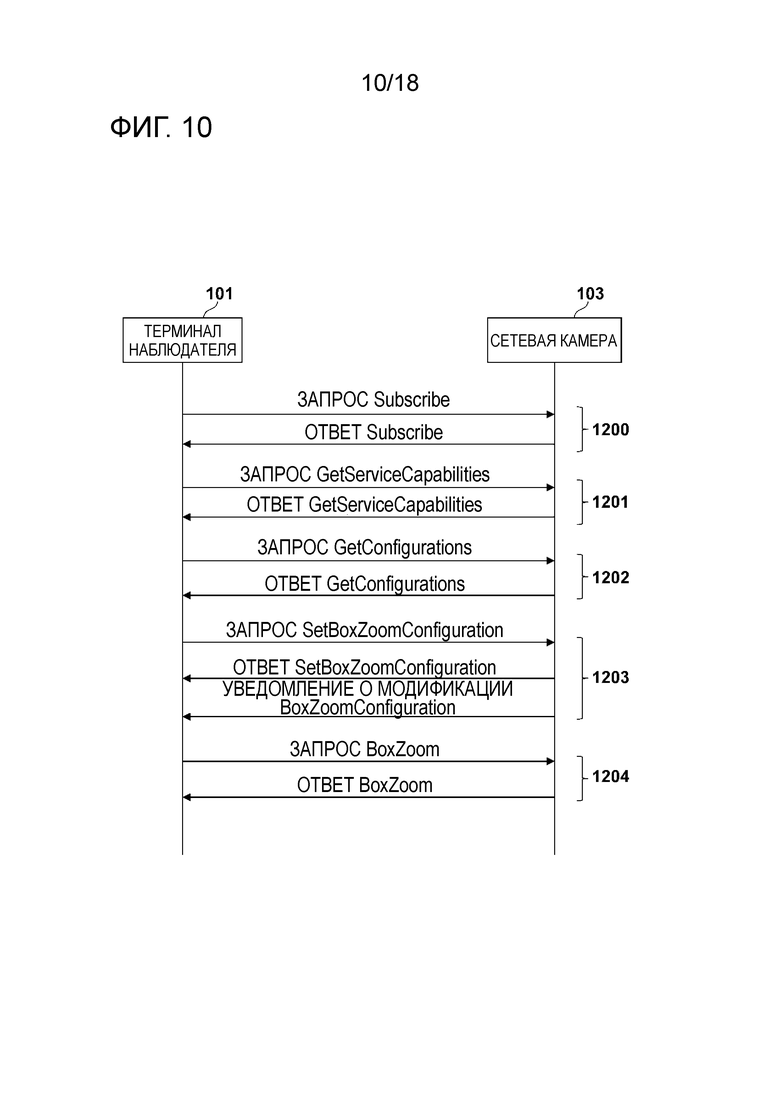
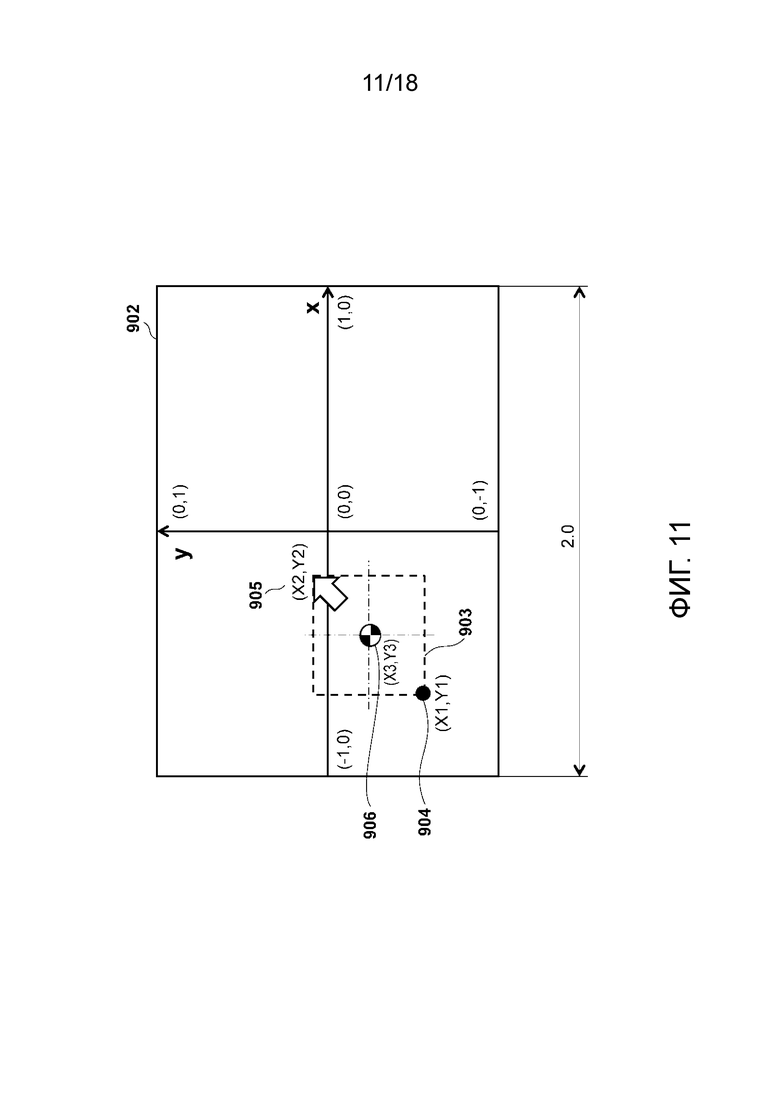




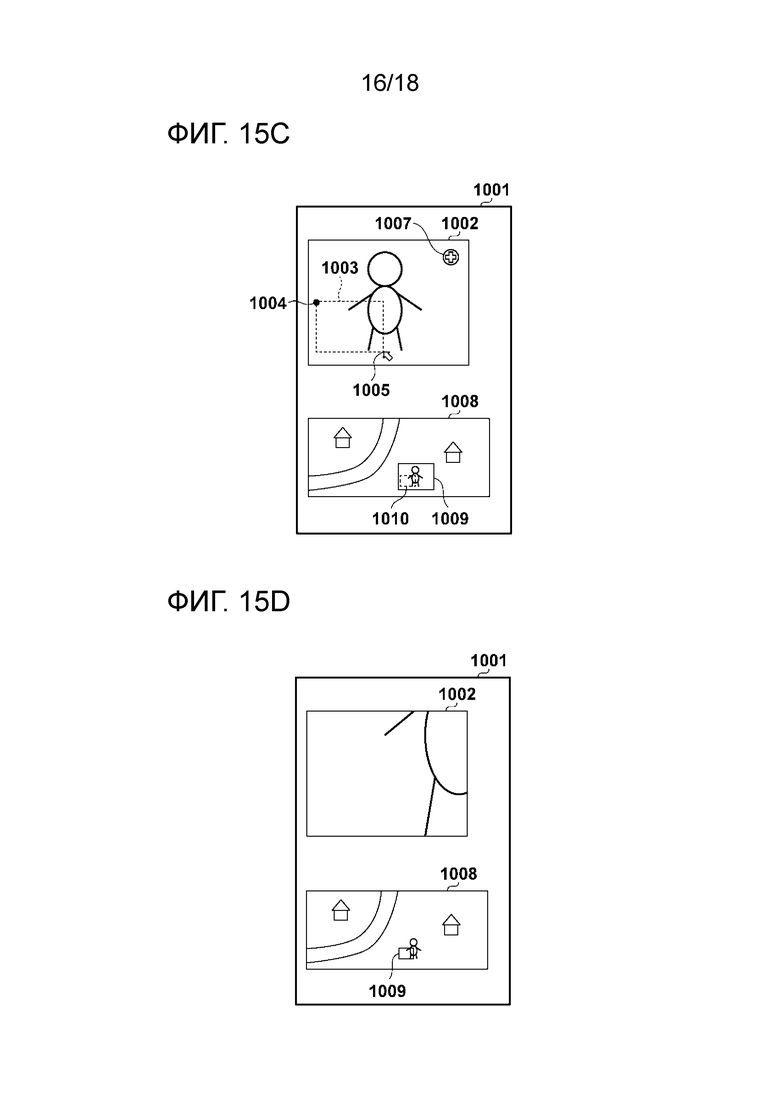


Изобретение относится к устройству управления для управления съёмкой в устройстве съёмки изображений, к способу управления этим устройством. Техническим результатом является обеспечение устройства управления, для которого возможно задавать условие съёмки изображения и с помощью которого можно определять состояние снятого изображения. Результат достигается тем, что команда либо управления по увеличению масштаба, либо управления по уменьшению масштаба для устройства съёмки изображений определяется на основании взаимного расположения первой координаты и второй координаты, указанных относительно изображения от устройства съёмки изображений, отображаемого на блоке отображения. Устройство съёмки изображений управляется на основании результата этого определения, первых координат и вторых координат. 3 н. и 15 з.п. ф-лы, 33 ил.
1. Устройство управления, содержащее:
блок (201) управления отображением, выполненный с возможностью побуждения блока (205) отображения отобразить снятое изображение, снятое устройством (103) съёмки изображений; и
блок (201, S404) определения, выполненный с возможностью выполнения обработки по определению для определения на основании относительного второго положения относительно первого положения, обозначенного операцией по отношению к снятому изображению, отображаемому на блоке отображения, является ли упомянутая операция операцией, которая вызывает выполнение обработки по увеличению масштаба, или операцией, которая вызывает выполнение обработки по уменьшению масштаба,
причём блок управления отображением побуждает блок отображения отобразить информацию (1006, 1007), соответствующую результату обработки по определению, пока упомянутая операция выполняется.
2. Устройство управления по п. 1, дополнительно содержащее блок управления, выполненный с возможностью побуждения устройства съёмки изображений, когда упомянутая операция завершена, выполнить либо обработку по увеличению масштаба, либо обработку по уменьшению масштаба на основании результата обработки по определению.
3. Устройство управления по п. 2, в котором, если блок определения определяет, что операция в отношении снятого изображения является операцией, которая вызывает выполнение обработки по уменьшению масштаба, и операция завершена, то блок управления побуждает устройство съёмки изображений выполнить обработку по уменьшению масштаба, чтобы угол изображения, снятого устройством съёмки изображений, соответствовал области, определяемой первым положением и вторым положением.
4. Устройство управления по п. 2, в котором упомянутая операция выполняется посредством сенсорной панели, и блок управления в ответ на переход из состояния, в котором указательное устройство не касается сенсорной панели, в состояние, в котором указательное устройство касается, делает положение касания первым положением, а в ответ на переход из состояния, в котором указательное устройство касается сенсорной панели, в состояние, в котором указательное устройство не касается, определяет, что упомянутая операция завершена.
5. Устройство управления по п. 2, в котором, когда обозначено первое положение относительно снятого изображения, а затем обозначено положение, отличное от первого положения, блок управления определяет, что упомянутая операция завершена.
6. Устройство управления по п. 1, в котором блок определения
определяет, что упомянутая операция является операцией, которая вызывает выполнение обработки по увеличению масштаба, если второе положение расположено в первом направлении относительно первого положения, и
определяет, что упомянутая операция является операцией, которая вызывает выполнение обработки по уменьшению масштаба, если второе положение расположено во втором направлении, противоположном первому направлению, относительно первого положения.
7. Устройство управления по п. 1, в котором блок определения выполняет обработку по определению, делающую наклон линии, соединяющей первое положение и второе положение, относительным положением второго положения относительно первого положения.
8. Устройство управления по п. 1, в котором блок управления отображением побуждает блок отображения отобразить рамку на основании первого положения и второго положения.
9. Устройство управления по п. 8, в котором блок управления отображением побуждает блок отображения отобразить изображение, ранее снятое устройством съёмки изображений, за пределами рамки.
10. Устройство управления по п. 1, дополнительно содержащее упомянутое устройство съёмки изображений.
11. Устройство управления по п. 1, в котором упомянутая информация является пиктограммой, соответствующей результату обработки по определению.
12. Устройство управления по п. 1, в котором, если блок определения определяет, что операция в отношении снятого изображения является операцией, которая вызывает выполнение обработки по уменьшению масштаба, и операция завершена, то блок управления вызывает выполнение обработки по уменьшению масштаба в соответствии с заданным значением масштабирования.
13. Устройство управления по п. 12, в котором заданное значение масштабирования является значением масштабирования, соответствующим состоянию, в котором блок управления вызывает выполнение съёмки изображения с максимальным уменьшением масштаба для устройства съёмки изображений.
14. Устройство управления по п. 1, в котором обработка по увеличению масштаба является обработкой, которая побуждает устройство съёмки изображений увеличить масштаб, а обработка по уменьшению масштаба является обработкой, которая побуждает устройство съёмки изображений уменьшить масштаб.
15. Устройство управления по п. 1, в котором упомянутая информация является либо информацией, соответствующей обработке по увеличению масштаба, либо информацией, соответствующей обработке по уменьшению масштаба.
16. Устройство управления по п. 2, в котором, если блок определения определяет, что операция в отношении снятого изображения является операцией, которая вызывает выполнение обработки по увеличению масштаба, и операция завершена, то блок управления побуждает устройство съёмки изображений выполнить обработку по увеличению масштаба, чтобы угол изображения, снятого устройством съёмки изображений, соответствовал области, определяемой первым положением и вторым положением.
17. Способ управления, содержащий:
этап управления отображением, на котором побуждают блок отображения отобразить снятое изображение, снятое устройством съёмки изображений; и
этап определения, на котором выполняют обработку по определению для определения на основании относительного второго положения относительно первого положения, обозначенного операцией по отношению к снятому изображению, отображаемому на этапе отображения, является ли упомянутая операция операцией, которая вызывает выполнение обработки по увеличению масштаба, или операцией, которая вызывает выполнение обработки по уменьшению масштаба,
причём этап управления отображением побуждает блок отображения отобразить информацию, соответствующую результату обработки по определению, пока упомянутая операция выполняется.
18. Машиночитаемый носитель, на котором сохранена компьютерная программа, которая при считывании и выполнении компьютером побуждает компьютер выполнить:
этап управления отображением, побуждающий блок отображения отобразить снятое изображение, снятое устройством съёмки изображений; и
этап определения, выполняющий обработку по определению для определения на основании относительного второго положения относительно первого положения, обозначенного операцией по отношению к снятому изображению, отображаемому на этапе отображения, является ли упомянутая операция операцией, которая вызывает выполнение обработки по увеличению масштаба, или операцией, которая вызывает выполнение обработки по уменьшению масштаба,
причём этап управления отображением побуждает блок отображения отобразить информацию, соответствующую результату обработки по определению, пока упомянутая операция выполняется.
| JP 2005130390 A, 2005.05.19 | |||
| JP 2001145094 A, 2001.05.25 | |||
| US 2014153897 A1, 2014.06.05 | |||
| US 2012154664 A1, 2012.06.21 | |||
| US 2006029292 A1, 2006.02.09 | |||
| US 6148149 A, 2000.11.14 | |||
| US 7002604 B1, 2006.02.21 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ОТОБРАЖЕНИЕМ И ЕГО СПОСОБ УПРАВЛЕНИЯ | 2012 |
|
RU2518215C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОСМОТРА ИНФОРМАЦИИ НА ДИСПЛЕЕ | 2002 |
|
RU2288512C2 |

