Изобретение относится к области энергетики, а более конкретно, касается ветровых энергетических установок, производящих электрическую энергию за счет использования силы потока воздуха.
Уровень техники
Из уровня техники известна система, позволяющая реализовать способ преобразования энергии ветра в электрическую энергию, заключающийся в том, что ветровую энергию, посредством крыльев с аэродинамическим профилем, установленных на каретках, совершающих линейное перемещение по направляющему пути с роликовым подвесом, преобразуют в энергию движения модулей преобразования энергии ветра и электрическую энергию (см. WO 2016150561 А).
Также известен способ преобразования энергии ветра в электрическую энергию, заключающийся в том, что ветровую энергию, посредством парусов, установленных на корпусе тележек, совершающих линейное перемещение по замкнутому рельсовому полотну, преобразуют в энергию движения модулей преобразования энергии ветра и электрическую энергию посредством механического генератора (см. ЕР 2078853 А1).
Также известна система, позволяющая реализовать способ преобразования энергии ветра в электрическую энергию, заключающийся в том, что ветровую энергию, посредством крыловых профилей, установленных на корпусе подвижных тележек преобразования энергии ветра, совершающих линейное перемещение по рельсовому пути, преобразуют в энергию движения модулей преобразования энергии ветра и электрическую энергию посредством устройства генерации электроэнергии, установленного на корпусе, при этом осуществляют ориентацию профилей механическим приводом (см. FR 2297333 А1).
Также известен способ преобразования энергии ветра в электрическую энергию, заключающийся в том, что ветровую энергию, посредством аэродинамических рабочих органов, установленных на корпусе подвижных модулей преобразования энергии ветра, совершающих линейное перемещение по направляющему полотну, преобразуют в энергию движения модулей преобразования энергии ветра и электрическую энергию посредством устройства генерации электроэнергии, установленного на корпусе (см. WO 2016154757 А1). Принят за прототип.
Общими недостатками известных из уровня техники технических решений являются:
- отсутствие возможности изменения суммарного количества модулей на направляющем полотне, и как следствие, отсутствует возможность изменять суммарную площадь работающих приемников ветровой энергии, что приводит к невозможности работы системы с максимальным КИЭВ в широком диапазоне скорости ветра;
- отсутствие возможности устранения потерь ветровой энергии, вызванной скосом потока за работающими приемниками ветровой энергии;
- отсутствие возможности эффективной работы системы при небольшой поступательной скорости приемников ветровой энергии, что приводит к появлению аэродинамического шума и инфразвуковых волн;
- узкий диапазон скоростей ветра, при которых способ эффективен, ввиду невозможности изменения площади крыльев и изменения установленной мощности генератора. Традиционный ветряк работает в оптимальном режиме, по некоторым оценкам, не более 15% времени. В остальные дни ветер для него слишком слабый, иногда слишком сильный;
- достижение эффективного режима работы только при высокой быстроходности, следствием чего являются создание мощных инфразвуковых волн, опасность для животных и людей, массовая гибель птиц, необходимость создания зоны отчуждения вокруг установки;
- высокая нагруженность элементов конструкции, что вынуждает применять дорогостоящие конструкционные материалы и технологии;
- большие габариты и масса деталей конструкции, для транспортировки и монтажа которых требуется проведение уникальных транспортных и монтажных операций;
- низкая ремонтопригодность конструкций, для замены любой крупной детали требуется повторное проведение уникальных транспортных и монтажных операций;
- потеря работоспособности конструкции при выходе из строя любой детали, что вызывает простой до полного завершения ремонта.
Раскрытие изобретения
В качестве технической проблемы заявленного технического решения положено создание способа преобразования энергии ветра, лишенного вышеописанных недостатков и обладающего повышенной энергетической эффективностью.
Технический результат, достигаемый заявленным техническим решением, заключается в обеспечении высокого коэффициента использования энергии ветра (КИЭВ), в том числе при снижении скорости движения модулей.
Технический результат достигается за счет использования способа преобразования энергии ветра в электрическую энергию, заключающегося в том, что ветровую энергию, посредством аэродинамических рабочих органов, установленных на корпусе подвижных модулей преобразования энергии ветра, совершающих линейное перемещение по направляющему полотну, преобразуют в энергию движения модулей преобразования энергии ветра и электрическую энергию посредством устройства генерации электроэнергии, при этом, согласно изобретению, осуществляют непрерывное регулирование в зависимости от внешних условий суммарной площади всех аэродинамических рабочих органов, выведенных на направляющее полотно.
В частных случаях реализации способа:
- осуществляют непрерывное регулирование в зависимости от внешних условий углов установки аэродинамических рабочих органов относительно модулей преобразования энергии ветра;
- осуществляют непрерывное регулирование в зависимости от внешних условий скорости перемещения модулей преобразования энергии ветра;
- осуществляют непрерывное регулирование в зависимости от внешних условий аэродинамических профилей каждого аэродинамического рабочего органа;
- осуществляют непрерывное регулирование в зависимости от внешних условий площади каждого аэродинамического рабочего органа;
- в качестве аэродинамических рабочих органов используют крылья с составным аэродинамическим профилем, включающих в себя основной профиль, и, по меньшей мере, один поворотный закрылок;
- в качестве устройства генерации электроэнергии используют генератор роторного типа, с валом которого жестко связано зубчатое колесо, которое обкатывают по зубчатой рейке, связанной в свою очередь с направляющим полотном;
- в качестве устройства генерации электроэнергии используют линейный генератор, при этом подвижная часть линейного генератора, установленная на корпусе, движется по неподвижной части линейного генератора, связанной в свою очередь с направляющим полотном;
- используют направляющее полотно, имеющее по меньшей мере два близкорасположенных участка с разнонаправленными движениями модулей преобразования энергии ветра;
- суммарную площадь поверхности аэродинамических рабочих органов изменяют путем ввода дополнительных модулей на направляющее полотно или вывода модулей с направляющего полотна, в зависимости от ветровых условий текущего момента времени.
Частные случаи реализации заявленного технического решения не ограничиваются вышеуказанными вариантами.
Сущность заявленного технического решения поясняется графическими материалами, где на:
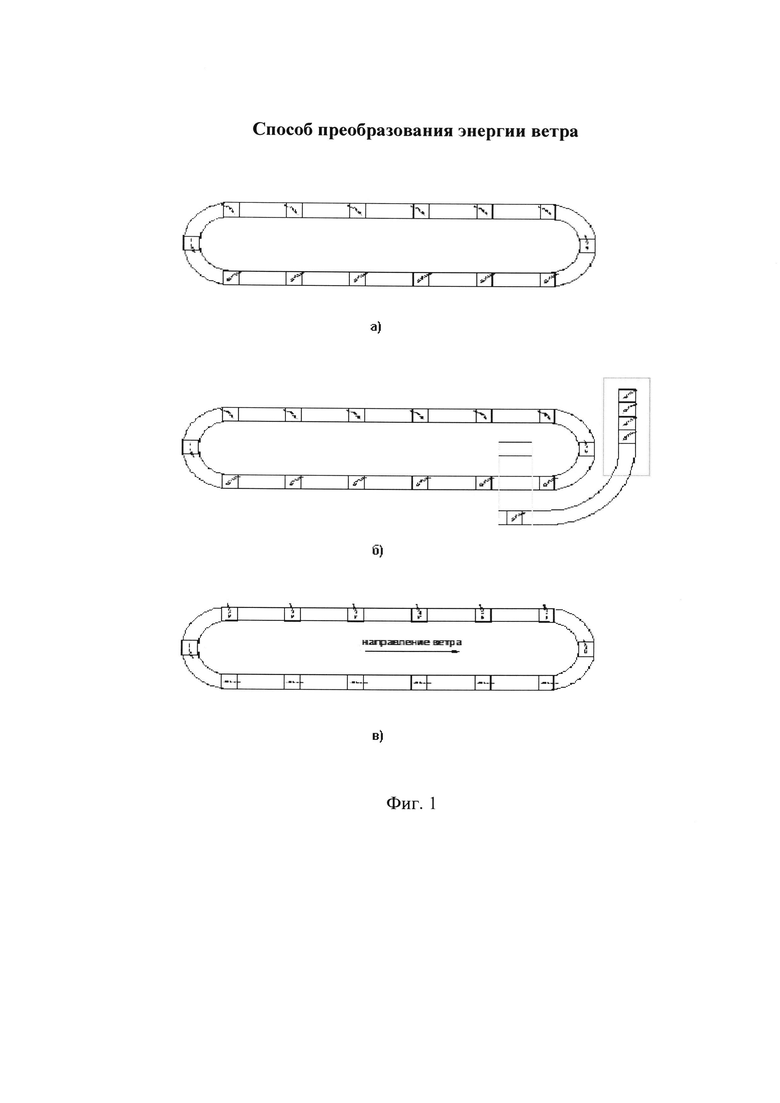
Фиг. 1 - изображена общая схема преобразования энергии ветра в электрическую энергию (а - базовый вариант рельсовой установки, 6 -вариант рельсовой установки с возможностью добавления модулей, в -вариант установки при работе с боковым ветром).
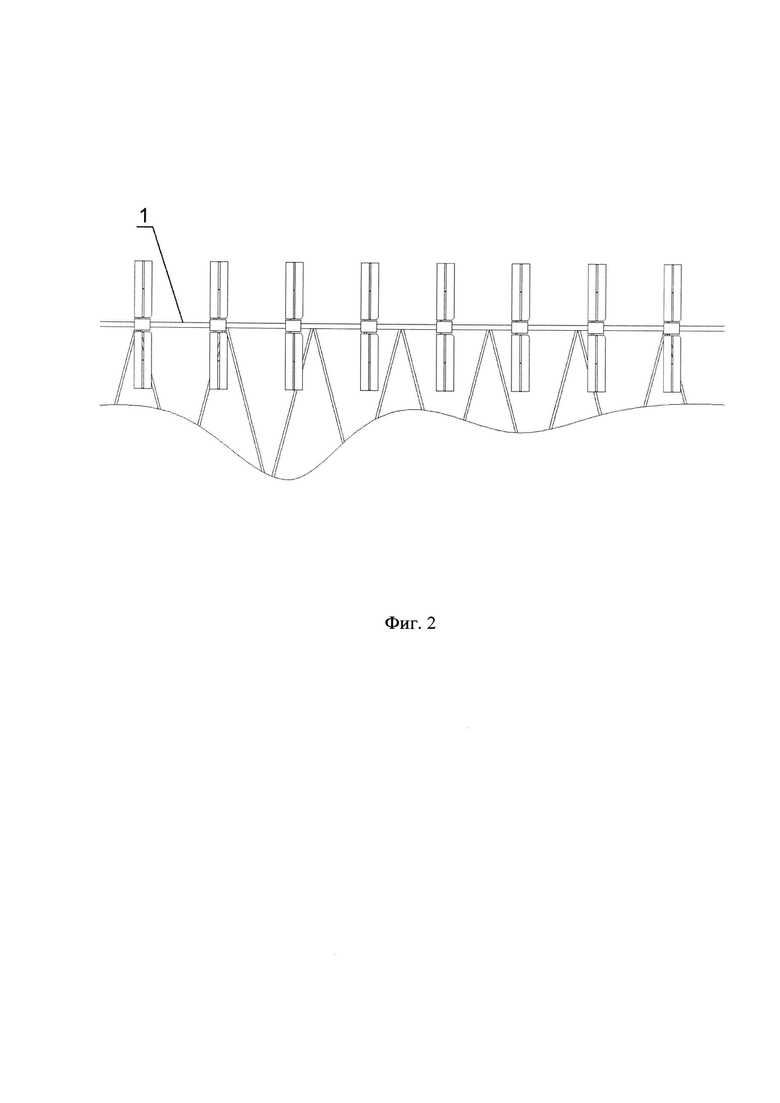
Фиг. 2 - изображен вариант исполнения преобразования энергии ветра в электрическую энергию, где участок направляющего полотна установлен на поддерживающей конструкции в виде эстакады, при этом модули преобразования энергии ветра ориентированы вертикально.
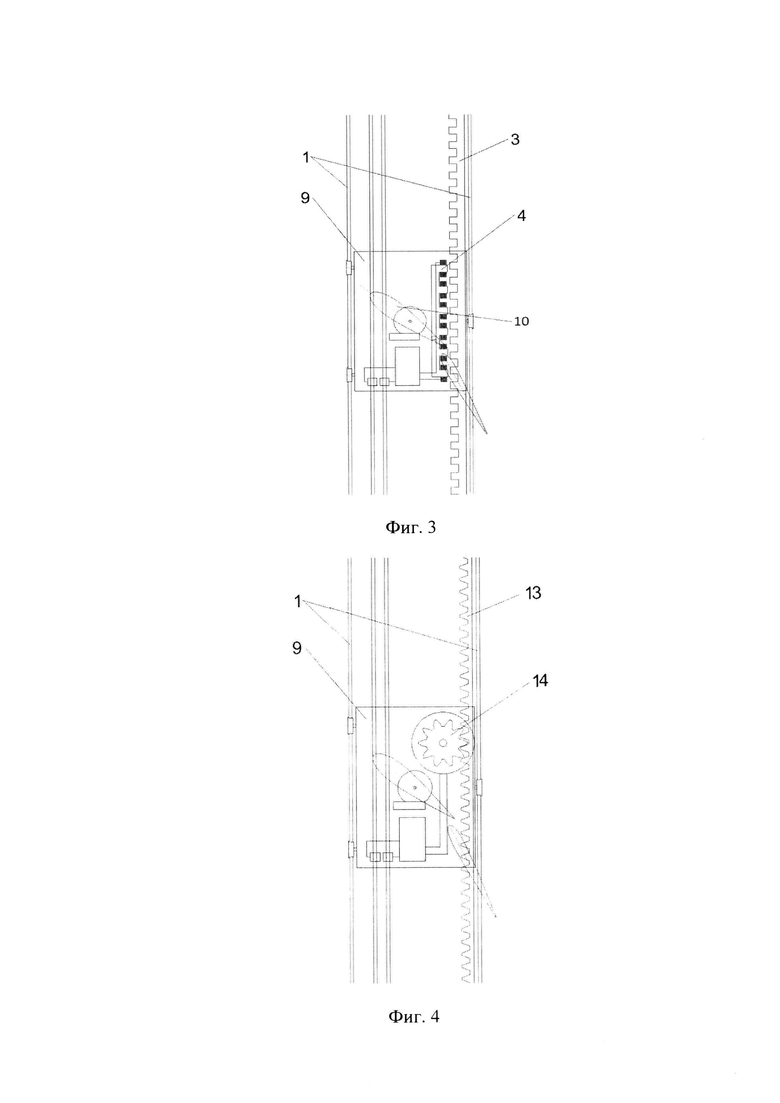
Фиг. 3 - изображен вариант исполнения преобразования энергии ветра в электрическую энергию, где контактная направляющая выполнена в виде бесконечной зубчатой рейкой из магнитомягкой стали, взаимодействующей посредством электромагнитных сил, по меньшей мере, с одной короткой рейкой, с обмотками на зубцах, содержащейся в модулях преобразования энергии ветра, представляя по существу единое устройство в виде линейного генератора, с возможностью генерирования электрического тока при их взаимодействии.
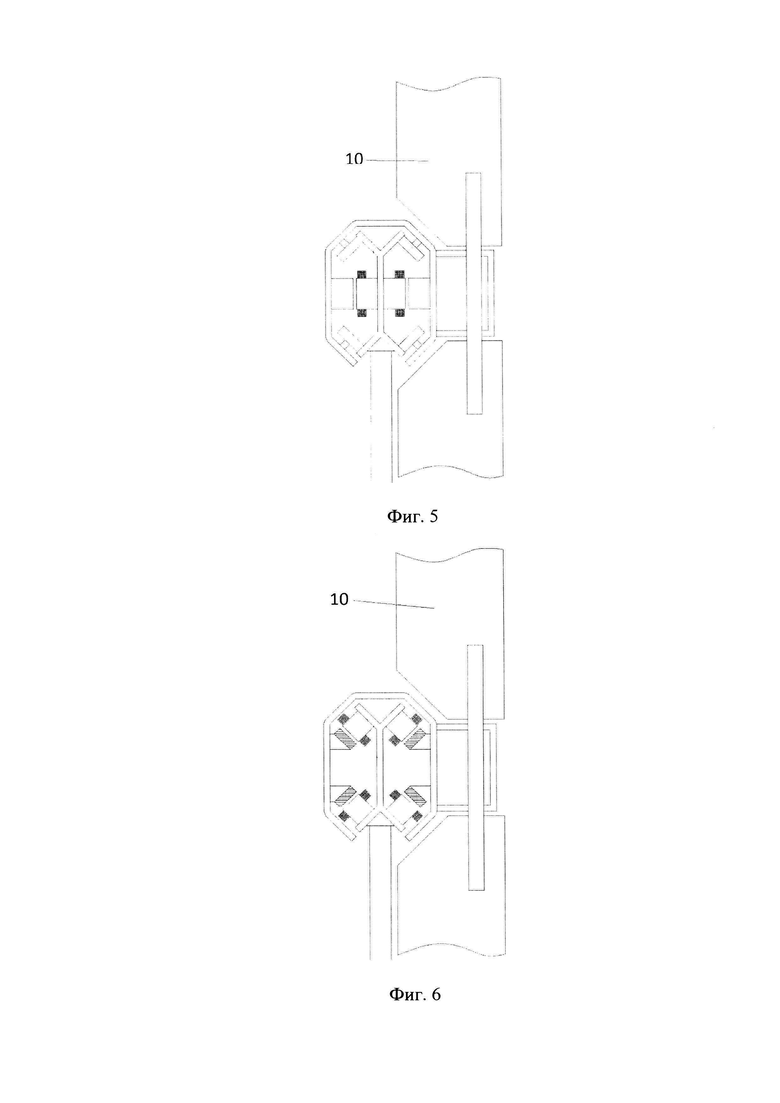
Фиг. 4 - изображен вариант исполнения преобразования энергии ветра в электрическую энергию, где контактная направляющая выполнена в виде зубчатой рейки, взаимодействующей при движении модуля посредством механических сил, по меньшей мере, с одним зубчатым колесом, содержащимся в модулях преобразования энергии ветра и выполненным с возможностью обкатывать зубчатую рейку, при этом модули преобразования энергии ветра содержат роторный генератор, механически связанный с зубчатым колесом.
Фиг.5 - изображен вариант исполнения преобразования энергии ветра в электрическую энергию, где направляющее полотно выполнено в виде монорельса.
Фиг. 6 - изображен вариант исполнения преобразования энергии ветра в электрическую энергию, где возможность перемещения по направляющему полотну выполнена посредством магнитного взаимодействия модулей преобразования энергии ветра с направляющим полотном.
Ниже приведены теоретические основы осуществления заявленного способа на примере использования крыльев в качестве аэродинамических рабочих органов.
Возможно осуществление способа при ориентации прямолинейного участка движения крыльев поперек воздушного потока.
Аэродинамический расчет системы показывает, что с увеличением скорости крыльев поперек потока снимаемая с одного квадратного метра мощность растет вплоть до высоких скоростей (от 15 до 200 м/с в зависимости от аэродинамического качества крыла).
Зависимость примерно линейная.
При этом степень нагруженности конструкции крыльев тоже растет.
Основной критерий влияния в данном случае - быстроходность (отношение скорости движения крыла поперек потока к скорости ветра).
При быстроходности меньше 2 аэродинамическое качество крыла играет небольшую роль, большую роль играет несущая способность профиля крыла, при быстроходности больше 2 аэродинамическое качество становится важным, при величине больше 5 - критически важным. При этом, чем меньше быстроходность крыла, тем больше скос потока.
В проектируемой установке скорость движения крыла должна быть ограничена:
10…15 м/с - по соображениям безопасности, экологичности среды обитания, психологического комфорта.
60 м/с - по аэродинамическому шуму.
5…30 м/с - по центробежным перегрузкам при прохождении поворота.
Практически, при организации управления установкой, следует стремиться к наибольшей скорости движения крыла с учетом указанных ограничений.
Способность крыла создавать аэродинамические силы зависит от угла установки крыла относительно местного воздушного потока. Местный (в районе крыла) воздушный поток отличается от естественного потока ветра на векторные величины скорости крыла, торможения и скоса потока ветрогенератором.
Параметры, по которым происходит регулирование:
Входные:
- скорость вымпельного ветра;
- направление вымпельного ветра;
- скорость истинного ветра;
- направление истинного ветра;
- скорость модуля;
- расстояние до ближайших модулей;
- проход модулем точки разворота движения;
- суммарная площадь работающих крыльев.
Управляемые параметры:
- угол установки крыла относительно вымпельного ветра;
- угол установки закрылка относительно основного профиля крыла (при использовании крыла с закрылком);
- площадь крыла;
- суммарная площадь работающих крыльев;
- скорость движения модуля.
Параметры и способы регулирования:
Угол установки крыла относительно вымпельного ветра устанавливается с помощью сервопривода поворота крыла либо с помощью управляемой сервоприводом вспомогательной аэродинамической поверхности (стабилизатора). Вымпельный ветер - это ветер, воспринимаемый непосредственно движущимся крылом, результат сложения всех векторов скоростей, возникающих при работе ветрогенератора с вектором истинного ветра.
Задача регулирования - выдерживать постоянный оптимальный угол установки крыла относительно меняющегося вымпельного ветра, при достижении предельной для крыла аэродинамической силы при усилении ветра плавно уменьшать угол установки по алгоритму (например, 1° на 1 м/с ветра). При повороте модуля из наветренного ряда в подветренный ряд сервопривод разворачивает угол установки крыла на противоположный для разворота вектора тяги крыла. Исходные данные предоставляют датчик направления, датчик скорости ветра, и датчик прохождения точки разворота. В случае использования сервостабилизатора, он является датчиком направления ветра, и аэродинамическим усилителем одновременно.
Угол установки закрылка относительно основного профиля крыла (при использовании крыла с закрылком) устанавливается с помощью сервопривода поворота закрылка либо с помощью управляемой сервоприводом вспомогательной аэродинамической поверхности (стабилизатора).
Задача регулирования - выдерживать постоянный оптимальный угол установки закрылка относительно основного профиля крыла, при достижении предельной для крыла аэродинамической силы при усилении ветра плавно уменьшать угол установки по алгоритму (например, 3° на 1 м/с ветра). При повороте модуля из наветренного ряда в подветренный ряд сервопривод разворачивает угол установки закрылка на противоположный, для разворота вектора тяги крыла. Исходные данные предоставляют датчик направления, датчик скорости ветра, датчик прохождения точки поворота. В случае использования сервостабилизатора он является и датчиком направления ветра, и аэродинамическим усилителем одновременно, и выполняет две функции - управление углом установки закрылка и управление углом установки крыла в целом.
Площадь крыла устанавливается системой в зависимости от конкретных ветровых условий для достижения оптимальной величины суммарной площади работающих крыльев в случае, если в системе не используется изменение числа работающих модулей, а электрогенераторы имеют запас мощности.
Число работающих модулей устанавливается системой в зависимости от конкретных ветровых условий для достижения оптимальной величины двух параметров - суммарной площади работающих крыльев, и суммарной мощности работающих электрогенераторов. Чем больше скорость ветра, тем большая требуется площадь крыльев и большая установленная мощность генераторов для оптимального преобразования мощности ветра.
Суммарная площадь работающих крыльев. В зависимости от отношения суммарной площади работающих крыльев к общей площади ветрового окна, используемого ветрогенератором, точка максимального КИЭВ соответствует определенной быстроходности (отношение скорости движения крыла вдоль полотна к скорости истинного ветра). Чем меньше относительная площадь крыльев, тем выше оптимальная быстроходность. При увеличении скорости ветра, для сохранения оптимального КИЭВ, абсолютная скорость перемещения модулей с крыльями должна расти.
Но реально допустимая скорость перемещения модулей ограничена следующими факторами:
- аэродинамический шум и инфразвук, излучаемый установкой;
- механический шум движущихся частей;
- безопасность для птиц;
- безопасный разлет обломков при разрушении конструкции;
- динамические нагрузки при прохождении модулем поворота.
С точки зрения безопасности эксплуатации и экологичности абсолютная скорость движения крыльев должна быть небольшой. Но у ветрогенераторов с небольшой скоростью при увеличении скорости ветра КИЭВ снижается ввиду снижения быстроходности. Для сохранения КИЭВ ветрогенератора на постоянно высоком уровне при увеличении скорости ветра суммарную площадь работающих крыльев нужно увеличивать. Система управления, используя данные датчиков скорости истинного или вымпельного ветра, изменяет суммарную площадь работающих крыльев путем изменения площади каждого крыла и/или добавления работающих модулей на полотно или путем вывода лишних модулей с полотна, в соответствии с заданным алгоритмом.
Скорость движения модуля регулируется с помощью изменения тормозящего усилия генератора. Тормозящий момент генератора изменяется с помощью электронного управления генератором от полного торможения до отрицательной величины, т.е. до перехода в моторный режим. Генератор обеспечивает торможение, преобразуя механическую мощность движения в электрическую мощность. При полном торможении механическая мощность равна нулю из-за отсутствия скорости. При нулевом торможении скорость максимальна, но механическая мощность также равна нулю из-за отсутствия усилия. Между этими двумя крайностями для каждых ветровых условий существует точка оптимальности, в которой механическая мощность и электрическая мощность максимальны. Система управления генератором изменяет отбираемую генератором мощность и, следовательно, создаваемый генератором тормозящий момент с помощью электронного регулирования подаваемых на катушки генератора и снимаемых с катушек импульсов тока. В простейшем случае катушки генератора работают непосредственно на сеть переменного тока, при этом автоматически обеспечивается синхронизация скорости перемещения модулей с частотой сети переменного тока.
Задачи регулирования:
- обеспечить максимально возможный коэффициент использования энергии ветра (КИЭВ) установкой в целом. Для каждой суммарной площади крыльев существует оптимальная быстроходность (отношение скорости движения крыла вдоль полотна к скорости истинного ветра), при которой КИЭВ ветрогенератора максимален. Система управления скоростью получает данные с датчиков скорости и направления истинного или вымпельного ветра, данные с датчиков скорости движения модуля, данные о положении других модулей, регулирует тормозящий момент генератора, стремясь постоянно поддерживать оптимальную быстроходность, с учетом следующих ограничений: максимально допустимая скорость на данном участке полотна, равномерность распределения модулей по полотну, предотвращение столкновения модулей, необходимость поддерживать заданную частоту вырабатываемого переменного тока, необходимость учитывать скорость, на которой электрический КПД генератора максимален.
- обеспечить возможность страгивания модулей при старте. Большинство генераторов имеют значительное усилие страгивания, которое не позволяет ветрогенератору стартовать при слабом ветре. Вентильно-индукторная технология позволяет системе управления, получающей данные от датчика скорости модуля, свести к минимуму усилие страгивания для облегчения старта.
- обеспечить аварийную остановку модулей. При превышении скорости ветра границы безопасной работы управляющая система, получающая данные от датчиков скорости истинного или вымпельного ветра, выполняет полное торможение генераторов всех модулей.
- обеспечить выполнение транспортных операций: ввод модулей на полотно, вывод модулей с полотна, транспортировка модулей в депо.
Ниже приведены принципы аэродинамического расчета ветрогенераторной установки.
Аэродинамический расчет проводят для установки, содержащей 2 ряда разнонаправлено движущихся крыльев.
Для аэродинамического расчета установки строят треугольники скоростей для истинных скоростей ветра 4, 6, 8, 12 м/с, и для скоростей движения крыльев поперек потока от 1 до 15 м/с с шагом 1 м. В треугольниках скоростей учитывают следующие вектора скорости:
- истинный ветер;
- скорость крыла поперек направления ветра;
- торможение потока;
- скос потока.
Для каждого сочетания скорости ветра и движения крыла определяют скорость и направление вымпельного ветра для каждого из двух рядов, и направление результирующей аэродинамической силы. По полученным данным рассчитывают необходимую для заданного ветрового окна площадь крыльев для каждого сочетания скоростей с использованием следующих параметров:
- плотность воздуха в районе предполагаемой установки ветрогенератора;
- оптимальный коэффициент подъемной силы выбранного профиля;
- аэродинамическое качество, соответствующее выбранной конфигурации крыльев;
- выбранный размер ветрового окна.
Последующий вариант, приводимый только в качестве примера, описан для обеспечения более точного понимания сути предпочтительных вариантов реализации заявленного изобретения.
В предпочтительном варианте исполнения способ преобразования энергии ветра в электрическую электроэнергию может быть представлен следующим образом.
Способ преобразования энергии ветра в электрическую энергию заключается в том, что ветровую энергию посредством аэродинамических рабочих органов 10, установленных на корпусе 9 подвижных модулей преобразования энергии ветра, совершающих линейное перемещение по направляющему полотну 1 (фиг. 1, 2), преобразуют в энергию движения модулей преобразования энергии ветра и электрическую энергию посредством устройства 6 генерации электроэнергии, установленного на корпусе 9 (фиг. 3, 4). При этом осуществляют непрерывное регулирование параметров в зависимости от внешних условий, таких как: углов установки аэродинамических рабочих органов 10 относительно модулей преобразования энергии ветра и направления ветра, скорости перемещения модулей преобразования энергии ветра, геометрии каждого аэродинамического рабочего органа, включая аэродинамический профиль и площадь, суммарной площади всех аэродинамических рабочих органов 10, выведенных на направляющее полотно 1.
При этом в качестве аэродинамических рабочих органов 10 можно использовать крылья с составным аэродинамическим профилем, включающими в себя основной профиль, и, по меньшей мере, один поворотный закрылок (фиг. 3, 4).
Возможно использование в качестве устройства 6 генерации электроэнергии генератора роторного типа, при этом зубчатое колесо 14, жестко связанное с валом генератора роторного типа, обкатывают по зубчатой рейке 13, жестко связанной в свою очередь с направляющим полотном 1. Также возможно использование линейного генератора, при этом подвижная часть 3 линейного генератора, установленная на корпусе 9, движется по неподвижной части 4 линейного генератора, жестко связанной в свою очередь с направляющим полотном 1.
Осуществление способа может быть реализовано так, что направляющее полотно 1 располагают таким образом, что получаются как минимум два близкорасположенных участка направляющего полотна 1 с разнонаправленными движениями модулей преобразования энергии ветра, при этом каждый следующий ряд модулей преобразования энергии по направлению движения ветра эффективно использует скошенный поток за предыдущим рядом (фиг. 1).
Суммарная площадь поверхности аэродинамических рабочих органов 10 может быть изменена путем изменения площади каждого крыла и/или ввода дополнительных модулей на направляющее полотно 1 или вывода модулей с направляющего полотна 1, в зависимости от ветровых условий текущего момента времени.
Реализация способа может быть осуществлена в системе, которая работает следующим способом.
При обдуве ветром приемников ветровой энергии -аэродинамических рабочих органов 10, закрепленных на модулях, возникает аэродинамическая сила. Эта сила перемещает модуль по направляющему полотну 1, при этом аэродинамический рабочий орган 10 постоянно ориентируется по направлению ветра для создания наилучшей тяги на каждом участке направляющего полотна 1 в зависимости от направления ветра. Устройство 6 генерации электроэнергии, установленное жестко на модуле, взаимодействует с контактной направляющей, которая в свою очередь связана с направляющим полотном 1. В результате совершения работы силой, возникшей при взаимодействии устройства 6 генерации и контактной направляющей, устройство 6 генерации вырабатывает электрический ток, который в свою очередь отдается в сеть, проложенную вдоль направляющего полотна 1. При этом в зависимости от параметров вырабатываемого электричества происходит непрерывное регулирование скорости самого модуля, поскольку устройство 6 генерации является, по сути, тормозом для перемещения модуля под действием силы ветра. Также происходит непрерывное регулирование количества модулей, выведенных в конкретный момент времени. При этом, например, для диагностики или технического обслуживания модуля его загоняют в депо без остановки всей системы и всех выведенных в данный момент времени модулей. Для этого, предварительно, учтя текущее положение требуемого модуля, переключают участок полотна 1 с движения по замкнутому пути на участок, следующий в депо. Если ветровой энергии в данный момент или на данном участке не хватает для такого маневра, то устройство 6 генерации электроэнергии переводится в режим по существу электродвигателя, уже потребляющего электроэнергию из сети. Аналогичным образом выводятся на направляющее полотно 1 модули, в том числе модули специального назначения, например, диагностические или снегоуборочные. Таким образом, в частности, возможно изменение суммарной площади поверхности аэродинамических рабочих органов 10 при реализации способа. Следует отметить, что вышеописанная работа системы в общем случае не зависит от того, как именно выполнено направляющее полотно 1, устройство 6 генерации электроэнергии, тип подвеса модуля на направляющем полотне 1 в частных своих случаях.
Заявленный способ, кроме отсутствия вышеуказанных недостатков известных из уровня техники технических решений, также обладает рядом преимуществ перед ними, в том числе перед аналогами:
- способ позволяет увеличить среднегодовой сбор ветровой энергии за счет поддержания оптимальных параметров в широком диапазоне ветров с помощью изменения параметров установки - количества крыльев, скорости движения крыльев, углов установки крыльев, аэродинамического профиля крыла, площади каждого крыла отдельно, количества работающих генераторов, без изменения оборудования и программного обеспечения;
- способ позволяет системе работать в оптимальном режиме при небольшой быстроходности крыльев, что исключает генерацию инфразвука, причинение вреда животным и людям, позволяет разместить установку недалеко от потребителей;
- способ позволяет построить систему на основе модульной структуры, где модули являются серийными изделиями небольшого размера, что снижает их стоимость, упрощает обслуживание и ремонт; упрощает доставку к месту монтажа и монтаж;
- аэродинамические рабочие органы при применении способа слабо нагружены центробежными силами, что позволяет применить недорогие долговечные конструкционные материалы, сталь и стеклопластик;
- способ позволяет системе гибко использовать земельные ресурсы местности, за счет применения любой геометрии и длины пути;
- способ позволяет легко наращивать мощность системы за счет увеличения длины пути, и увеличения количества рабочих модулей;
- способ позволяет построить систему, работающую при любом направлении ветра, без необходимости ориентации всей установки на ветер;
- при использовании способа выход из строя части модулей не приводит к остановке работы установки, возможно выполнение сервисных и ремонтных работ с модулями, без остановки работы всей системы;
- способ позволяет построить систему на основе применения уже освоенных в производстве прототипов - железнодорожный транспорт и аттракционы типа «Американские горки».
Изобретение относится к способам преобразования энергии ветра в электроэнергию. Способ преобразования энергии ветра в электрическую энергию заключается в том, что ветровую энергию, посредством аэродинамических рабочих органов, установленных на корпусе подвижных модулей преобразования энергии ветра, совершающих линейное перемещение по направляющему полотну, преобразуют в энергию движения модулей преобразования энергии ветра и электрическую энергию посредством устройства генерации электроэнергии. При этом осуществляют непрерывное регулирование в зависимости от внешних условий суммарной площади всех аэродинамических рабочих органов, выведенных на направляющее полотно. Осуществляют непрерывное регулирование в зависимости от внешних условий углов установки аэродинамических рабочих органов относительно модулей преобразования энергии ветра, скорости перемещения модулей преобразования энергии ветра, аэродинамических профилей каждого аэродинамического рабочего органа, площади каждого аэродинамического рабочего органа. При этом в качестве аэродинамических рабочих органов предпочтительно использовать крылья с составным аэродинамическим профилем, включающих в себя основной профиль, и, по меньшей мере, один поворотный закрылок. Изобретение направление на повышение коэффициента использования энергии ветра. 9 з.п. ф-лы, 6 ил.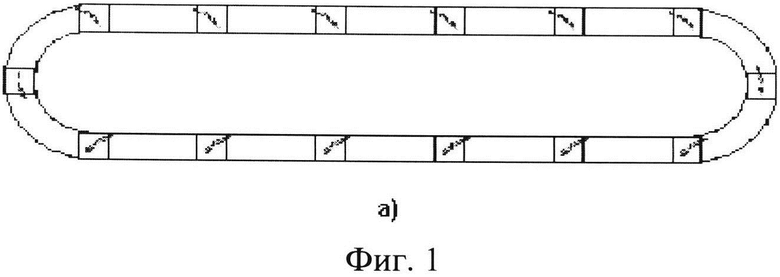
1. Способ преобразования энергии ветра в электрическую энергию, заключающийся в том, что ветровую энергию, посредством аэродинамических рабочих органов, установленных на корпусе подвижных модулей преобразования энергии ветра, совершающих линейное перемещение по направляющему полотну, преобразуют в энергию движения модулей преобразования энергии ветра и электрическую энергию посредством устройства генерации электроэнергии, отличающийся тем, что осуществляют непрерывное регулирование в зависимости от внешних условий суммарной площади всех аэродинамических рабочих органов, выведенных на направляющее полотно.
2. Способ по п. 1, отличающийся тем, что осуществляют непрерывное регулирование в зависимости от внешних условий углов установки аэродинамических рабочих органов относительно модулей преобразования энергии ветра.
3. Способ по п. 1, отличающийся тем, что осуществляют непрерывное регулирование в зависимости от внешних условий скорости перемещения модулей преобразования энергии ветра.
4. Способ по п. 1, отличающийся тем, что осуществляют непрерывное регулирование в зависимости от внешних условий аэродинамического профиля каждого аэродинамического рабочего органа.
5. Способ по п. 1, отличающийся тем, что осуществляют непрерывное регулирование в зависимости от внешних условий площадь каждого аэродинамического рабочего органа.
6. Способ по п. 1, отличающийся тем, что в качестве аэродинамических рабочих органов используют крылья с составным аэродинамическим профилем, включающих в себя основной профиль, и, по меньшей мере, один поворотный закрылок.
7. Способ по п. 1, отличающийся тем, что в качестве устройства генерации электроэнергии используют генератор роторного типа, с валом которого жестко связано зубчатое колесо, которое обкатывают по зубчатой рейке, связанной в свою очередь с направляющим полотном.
8. Способ по п. 1, отличающийся тем, что в качестве устройства генерации электроэнергии используют линейный генератор, при этом подвижная часть линейного генератора, установленная на корпусе, движется по неподвижной части линейного генератора, связанной в свою очередь с направляющим полотном.
9. Способ по п. 1, отличающийся тем, что используют направляющее полотно, имеющее по меньшей мере два близкорасположенных участка с разнонаправленными движениями модулей преобразования энергии ветра,
10. Способ по п. 1, отличающийся тем, что суммарную площадь поверхности аэродинамических рабочих органов изменяют путем ввода дополнительных модулей на направляющее полотно или вывода модулей с направляющего полотна, в зависимости от ветровых условий текущего момента времени.
| ВЕТРОВАЯ СИСТЕМА ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ЗА СЧЕТ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ПО НАПРАВЛЯЮЩЕЙ МОДУЛЕЙ, БУКСИРУЕМЫХ ВОЗДУШНЫМИ ЗМЕЯМИ, И СПОСОБ ПРОИЗВОДСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2008 |
|
RU2451826C2 |
| Ветроколесо | 1985 |
|
SU1281740A1 |
| ДВИГАТЕЛЬ ДЛЯ УТИЛИЗАЦИИ ЭНЕРГИИ ТЕКУЩЕЙ СРЕДЫ | 2000 |
|
RU2166664C1 |
| Способ получения малярной краски | 1928 |
|
SU15761A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| KR 20110107031 A, 30.09.2011. | |||

