Область техники, к которой относится изобретение
Изобретение относится к транспортирующему устройству для перемещения объекта. Объектом может быть устройство или инструмент машины, в частности упаковочная машина.
Уровень техники
Известны транспортирующие устройства, основанные на технологии линейных двигателей, которые содержат направляющее устройство, которое содержит якорь статора, образованный множеством индивидуально возбуждаемых электромагнитов, и множество подвижных элементов или тележек, которые содержат соответствующие постоянные магниты и независимо перемещаются по направляющему устройству индивидуально управляемыми электромагнитами.
Направляющее устройство содержит направляющие элементы, а подвижные элементы содержат колеса, способные скользить по направляющим элементам направляющего устройства.
В случае когда подвижный элемент поддерживает устройство или инструмент машины, положение подвижного элемента относительно направляющего устройства должно быть очень точным для того, чтобы гарантировать, что машина работает правильно.
Недостаток известного транспортирующего устройства состоит в том, что между колесами и направляющими элементами может быть излишний люфт или зазор, приводящий к нарушению позиционирования подвижных элементов относительно направляющего устройства. В случае, когда транспортирующее устройство используют в машине, это может являться причиной нарушения позиционирования устройства или инструмента, поддерживаемого подвижными элементами.
Раскрытие изобретения
Целью изобретения является улучшение известного транспортирующего устройства.
Другая цель изобретения состоит в том, чтобы предоставить транспортирующее устройство, которое обладает большой жесткостью и очень ограниченным люфтом или зазором.
Другая цель изобретения состоит в том, чтобы предоставить транспортирующее устройство, которое при использовании в машине, может нести инструмент машины и позиционировать инструмент очень аккуратно и точно.
Согласно изобретению предоставлено транспортирующее устройство по пункту 1 формулы изобретения.
Краткое описание чертежей
В качестве примера будет описан предпочтительный, неограничивающий вариант осуществления изобретения со ссылкой на сопровождающие чертежи, на которых:
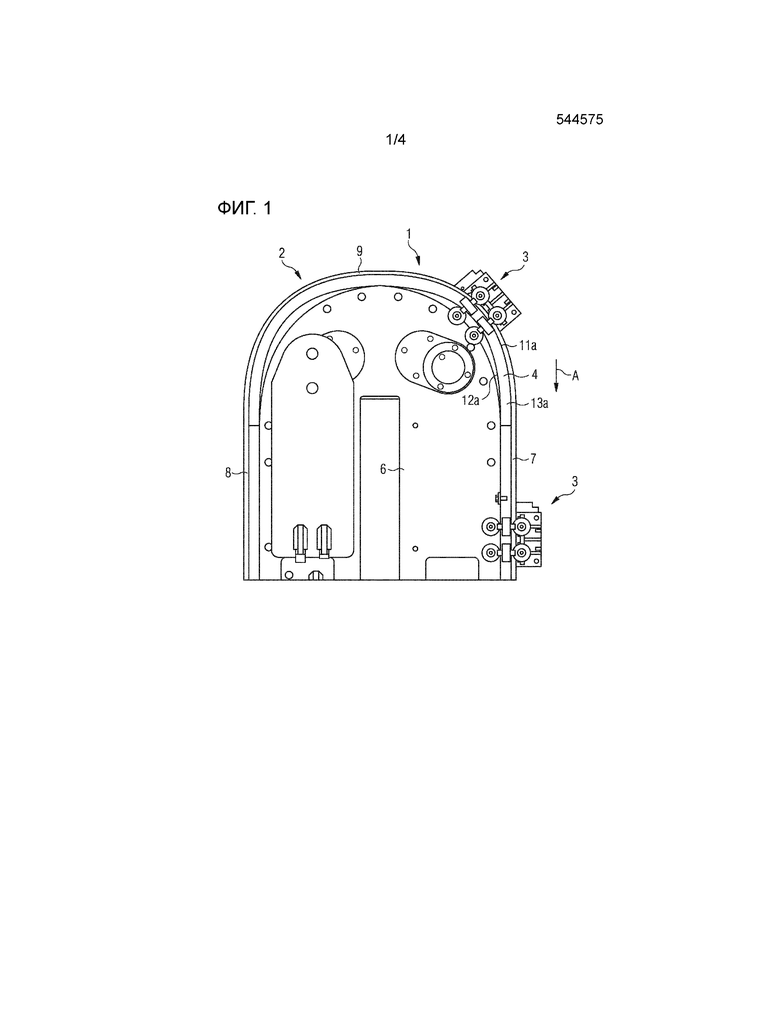
фигура 1 представляет собой вид сбоку с удаленными для ясности деталями устройства согласно изобретению;
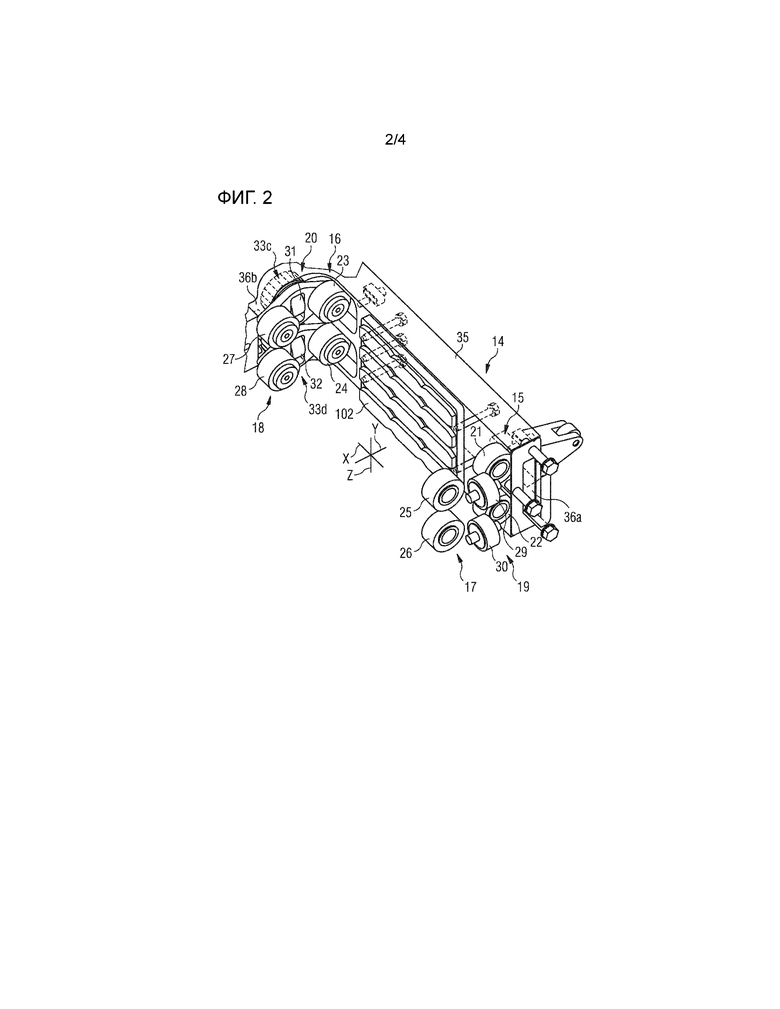
фигура 2 представляет собой вид в перспективе сбоку с удаленными для ясности деталями подвижного элемента устройства фигуры 1;
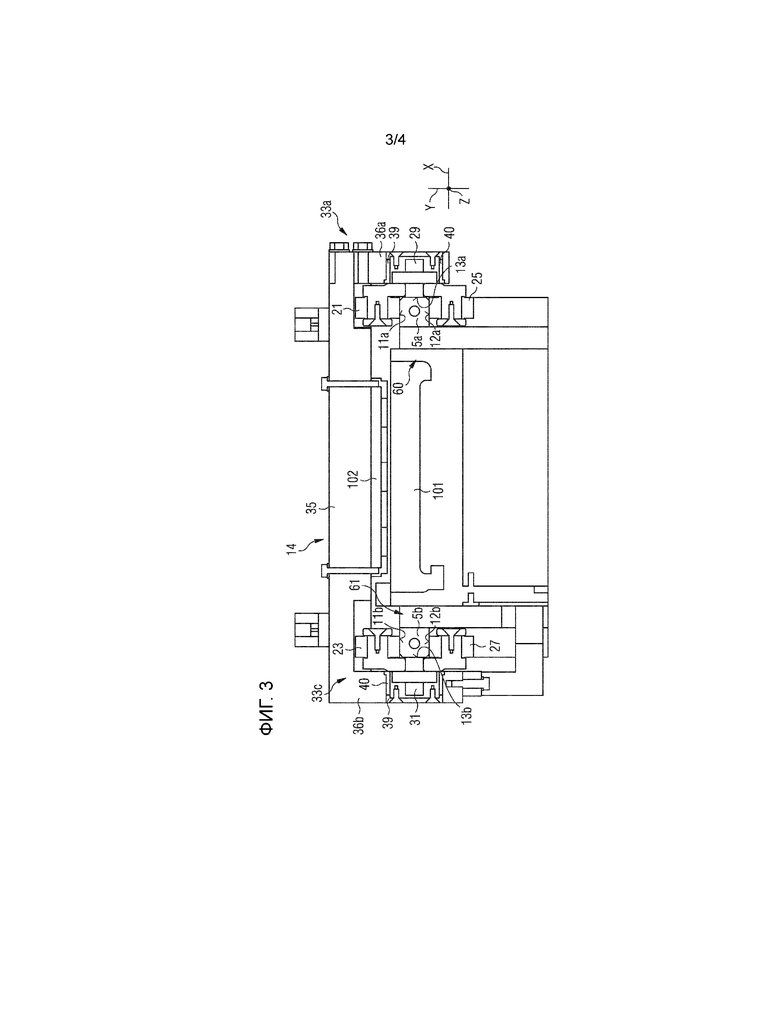
фигура 3 представляет собой поперечное сечение с удаленными для ясности деталями подвижного элемента фигуры 2;
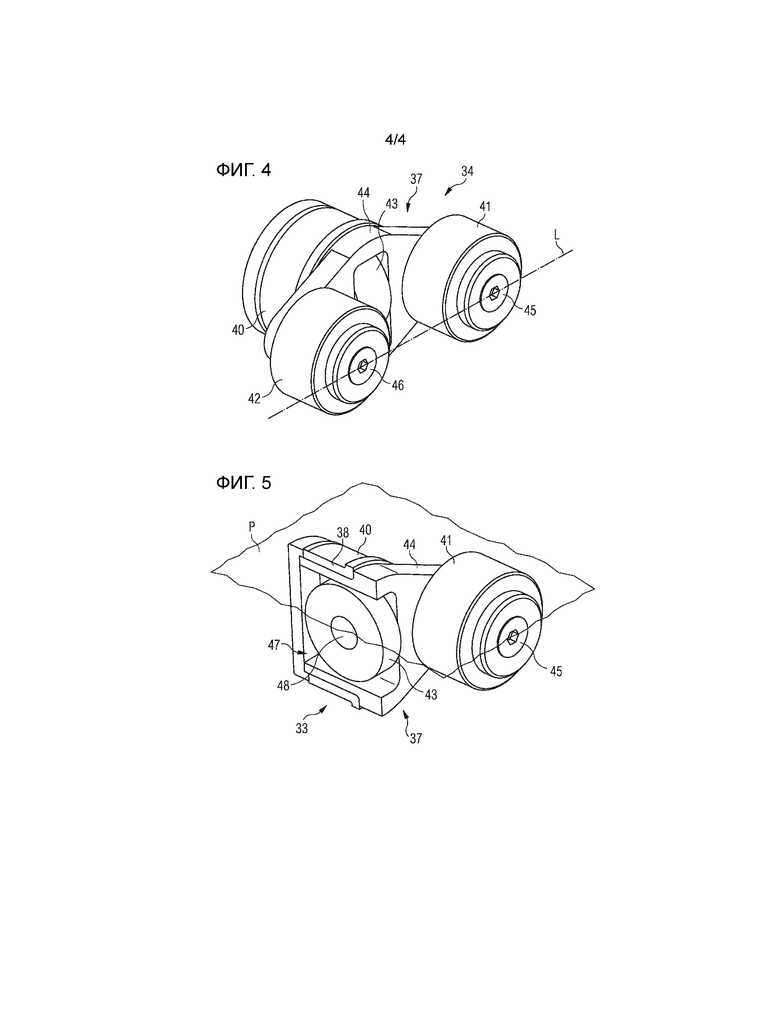
фигура 4 представляет собой вид в перспективе элемента вращения, который поддерживает ролики подвижного элемента фигур 2 и 3;
фигура 5 представляет собой вид в перспективе в частичном разрезе элемента вращения фигуры 4.
Подробное описание предпочтительных вариантов осуществления изобретения
Со ссылкой на фигуры 1-5 показано транспортирующее устройство 1, содержащее направляющее устройство 2 и множество подвижных элементов 3, выполненных с возможностью перемещения по направляющему устройству 2.
Направляющее устройство 2 содержит якорь статора, образованный множеством индивидуально возбуждаемых электромагнитов 101, а подвижные элементы 3 содержат постоянные магниты 102.
Подвижные элементы 3 выполнены с возможностью независимого перемещения по направляющему устройству 2 индивидуально управляемыми электромагнитами 101.
В другом варианте осуществления направляющее устройство 2 содержит постоянные магниты, а подвижные элементы 3 содержат индивидуально возбуждаемые электромагниты.
Подвижные элементы 3 выполнены с возможностью переноса объекта. В случае, когда транспортирующее устройство используется в машине, в частности, в упаковочной машине, упомянутым выше объектом может быть устройство или инструмент, который выполняет в машине определенную работу.
В частности, в случае упаковочной машины для изготовления упаковок посредством складывания, наполнения и герметизации рулона упаковочного материала, устройством или инструментом может быть формирующий элемент для формирования упаковки, или формовочный элемент для формования пластмассы на упаковочный материал для получения из упаковки открывающего устройства.
Направляющее устройство 2 содержит направляющий элемент 4, на котором могут перемещаться подвижные элементы 3.
Направляющий элемент 4 содержит первую пластину 5a, выступающую из первой стороны 60 рамы 6 направляющего устройства 2.
Направляющий элемент 4 также содержит вторую пластину 5b, выступающую из второй стороны 61, противоположной первой стороне 60 рамы 6.
Направляющий элемент 4 имеет первый линейный участок 7 и второй линейный участок 8. Первый линейный участок 7 и второй линейный участок 8, по существу, параллельны друг другу.
В показанном варианте осуществления первый линейный участок 7 и второй линейный участок 8 расположены в вертикальной плоскости.
Направляющий элемент 4 дополнительно содержит первый изогнутый участок 9 и второй изогнутый участок (не показано) расположенные между первым линейным участком 7 и вторым линейным участком 8. Первый изогнутый участок 9 и второй изогнутый участок расположены друг напротив друга. Таким образом, направляющий элемент 4 имеет, по существу, овальное продольное поперечное сечение.
Подвижные элементы 3 содержат поддерживающий корпус 14, выполненный с возможностью поддержки упомянутого выше объекта, т.е. в случае машины устройства или инструмента.
Подвижные элементы 3 дополнительно содержат первую пару роликов 15, дополнительную первую пару роликов 16, вторую пару роликов 17, дополнительную вторую пару роликов 18, третью пару роликов 19 и дополнительную третью пару роликов 20, которые соединены с возможностью вращения с поддерживающим корпусом 14 и соединены с возможностью скольжения с направляющим элементом 4.
Направляющий элемент 4 содержит первую направляющую поверхность 11a и дополнительную первую направляющую поверхность 11b, обращенную к поддерживающему корпусу 14, вторую направляющую поверхность 12a и дополнительную вторую направляющую поверхность 12b, обращенную от поддерживающего корпуса 14, и третью направляющую поверхность 13a, расположенную поперек относительно первой направляющей поверхности 11a и второй направляющей поверхности 12a, и дополнительную третью направляющую поверхность 13b, расположенную поперек относительно дополнительной первой направляющей поверхности 11b и дополнительной второй направляющей поверхности 12b.
Первая направляющая поверхность 11a и дополнительная первая направляющая поверхность 11b взаимно выровнены.
Вторая направляющая поверхность 12a и дополнительная вторая направляющая поверхность 12b взаимно выровнены.
Вторая направляющая поверхность 12a расположена на противоположной стороне поддерживающего корпуса 14 относительно первой направляющей поверхности 11a.
Дополнительная вторая направляющая поверхность 12b расположена на противоположной стороне поддерживающего корпуса 14 относительно дополнительной первой направляющей поверхности 11b.
Первая направляющая поверхность 11a и дополнительная первая направляющая поверхность 11b параллельны второй направляющей поверхности 12a и дополнительной второй направляющей поверхности 12b.
Третья направляющая поверхность 13a перпендикулярна первой направляющей поверхности 11a и второй направляющей поверхности 12a.
Дополнительная третья направляющая поверхность 13b перпендикулярна дополнительной первой направляющей поверхности 11b и дополнительной второй направляющей поверхности 12b.
Третья направляющая поверхность 13a параллельна дополнительной третьей направляющей поверхности 13b.
Первая пластина 5a содержит первую направляющую поверхность 11a, вторую направляющую поверхность 12a и третью направляющую поверхность 13a.
Вторая пластина 5b содержит дополнительную первую направляющую поверхность 11b, дополнительную вторую направляющую поверхность 12b и дополнительную третью направляющую поверхность 13b.
Первая пара роликов 15 скользит по первой направляющей поверхности 11a.
Дополнительная первая пара роликов 16 скользит по дополнительной первой направляющей поверхности 11b.
Вторая пара роликов 17 скользит по второй направляющей поверхности 12a.
Дополнительная вторая пара роликов 18 скользит по дополнительной второй направляющей поверхности 12b.
Третья пара роликов 19 скользит по третьей направляющей поверхности 13a.
Дополнительная третья пара роликов 20 скользит по дополнительной третьей направляющей поверхности 13b.
Первая пара роликов 15 содержит первый ролик 21 и второй ролик 22.
Дополнительная первая пара роликов 16 содержит третий ролик 23 и четвертый ролик 24.
Вторая пара роликов 17 содержит пятый ролик 25 и шестой ролик 26.
Дополнительная вторая пара роликов 18 содержит седьмой ролик 27 и восьмой ролик 28.
Третья пара роликов 19 содержит девятый ролик 29 и десятый ролик 30.
Дополнительная третья пара роликов 20 содержит одиннадцатый ролик 31 и двенадцатый ролик 32.
Подвижные элементы 3 скользят на направляющем устройстве 2 вдоль направления A продвижения.
Подвижные элементы 3 перемещаются на направляющем устройстве 2 вдоль оси Z, параллельной направлению A продвижения.
Первый ролик 21, второй ролик 22, третий ролик 23, четвертый ролик 24, пятый ролик 25, шестой ролик 26, седьмой ролик 27 и восьмой ролик 28 предотвращают перемещение подвижного элемента 3 вдоль дополнительной оси Y, перпендикулярной оси Z, а также перпендикулярной первой направляющей поверхности 11a, дополнительной первой направляющей поверхности 11b, второй направляющей поверхности 12a и дополнительной второй направляющей поверхности 12b.
Девятый ролик 29, десятый ролик 30, одиннадцатый ролик 31 и двенадцатый ролик 32 предотвращают перемещение подвижного элемента 3 вдоль еще одной дополнительной оси X, перпендикулярной оси Z, а также перпендикулярной третьей направляющей поверхности 13a и дополнительной третьей направляющей поверхности 13b.
Ось Z, дополнительная ось Y и еще одна дополнительная ось X перпендикулярны друг другу.
Ось Z, дополнительная ось Y и еще одна дополнительная ось X предназначены составлять единое целое с подвижным элементом 3, когда подвижный элемент 3 движется по направляющему устройству 4.
Второй ролик 22 и пятый ролик 25, и четвертый ролик 24 и седьмой ролик 27 предотвращают вращение подвижных элементов 3 вокруг еще одной дополнительной оси X в направлении по часовой стрелке.
Первый ролик 21 и шестой ролик 26, и третий ролик 23 и восьмой ролик 28 предотвращают вращение подвижных элементов 3 вокруг еще одной дополнительной оси X в направлении против часовой стрелки.
Десятый ролик 30 и одиннадцатый ролик 31 предотвращают вращение подвижных элементов 3 вокруг дополнительной оси Y в направлении по часовой стрелке.
Девятый ролик 29 и двенадцатый ролик 32 предотвращают вращение подвижных элементов 3 вокруг дополнительной оси Y в направлении против часовой стрелки.
Первый ролик 21 и второй ролик 22, и седьмой ролик 27 и восьмой ролик 28 предотвращают вращение подвижных элементов 3 вокруг оси Z в направлении по часовой стрелке.
Пятый ролик 25 и шестой ролик 26, и третий ролик 23 и четвертый ролик 24 предотвращают вращение подвижных элементов 3 вокруг оси Z в направлении против часовой стрелки.
Оси вращения роликов первой пары роликов 15, т.е. оси вращения первого ролика 21 и второго ролика 22 параллельны еще одной дополнительной оси X и перпендикулярны третьей направляющей поверхности 13a и дополнительной третьей направляющей поверхности 13b.
Оси вращения роликов дополнительной первой пары роликов 16, т.е. оси вращения третьего ролика 23 и четвертого ролика 24 параллельны еще одной дополнительной оси X и перпендикулярны третьей направляющей поверхности 13a и дополнительной первой направляющей поверхности 13b.
Оси вращения роликов второй пары роликов 17, т.е. оси вращения пятого ролика 25 и шестого ролика 26 параллельны еще одной дополнительной оси X и перпендикулярны третьей направляющей поверхности 13a и дополнительной третьей направляющей поверхности 13b.
Оси вращения роликов дополнительной второй пары роликов 18, т.е. оси вращения седьмого ролика 27 и восьмого ролика 28 параллельны еще одной дополнительной оси X и перпендикулярны третьей направляющей поверхности 13a и дополнительной второй направляющей поверхности 13b.
Оси вращения роликов третьей пары роликов 19, т.е. оси вращения девятого ролика 29 и десятого ролика 30 параллельны дополнительной оси Y и перпендикулярны первой направляющей поверхности 11a, дополнительной первой направляющей поверхности 11b, второй направляющей поверхности 12a и дополнительной второй направляющей поверхности 12b.
Оси вращения роликов дополнительной третьей пары роликов 20, т.е. оси вращения одиннадцатого ролика 31 и двенадцатого ролика 32 параллельны дополнительной оси Y и перпендикулярны первой направляющей поверхности 11a, дополнительной первой направляющей поверхности 11b, второй направляющей поверхности 12a и дополнительной второй направляющей поверхности 12b.
Первый ролик 21, второй ролик 22, третий ролик 23, четвертый ролик 24, пятый ролик 25, шестой ролик 26, седьмой ролик 27, восьмой ролик 28, девятый ролик 29, десятый ролик 30, одиннадцатый ролик 31 и двенадцатый ролик 32 установлены на поддерживающем корпусе 14 посредством блоков 33 вращения, каждый из которых поддерживает группу роликов 34.
Каждая группа роликов 34 содержит три ролика, ролик, относящийся к первой паре роликов 15 или к дополнительной первой паре роликов 16, дополнительный ролик, относящийся ко второй паре роликов 17 или, соответственно, к дополнительной второй паре роликов 18, и еще один дополнительный ролик, относящийся к третьей паре роликов 19 или, соответственно, к дополнительной третьей паре роликов 20.
Поддерживающий корпус 14 содержит переднюю часть 35, по существу продолжающуюся в плоскости, образованной осью Z и еще одной дополнительной осью X, и первую боковую часть 36a и вторую боковую часть 36b, выступающие с противоположных сторон передней части 35, и каждая по существу продолжается в плоскости, образованной осью Z и дополнительной осью Y. Передняя часть 35 выполнена с возможностью поддержки упомянутого выше объекта.
Каждый блок 33 вращения содержит элемент 37 вращения, который соединен с возможностью вращения с поддерживающим корпусом 14, в частности, с первой боковой частью 36a или со второй боковой частью 36b, и выполнен с возможностью вращения вокруг оси вращения, параллельной еще одной дополнительной оси X, т.е. перпендикулярной третьей направляющей поверхности 13a и дополнительной третьей направляющей поверхности 13b.
Каждый подвижный элемент 3 содержит четвертые блока 33 вращения, в частности первый блок 33а вращения (показанный на фигуре 3) и второй блок вращения (не показанный), соединенные с возможностью вращения с первой боковой частью 36a, и третий блок 33c вращения (показанный на фигурах 2 и 3) и четвертый блок 33d вращения (показанный на фигуре 2), соединенные с возможностью вращения со второй боковой частью 36b.
Первый блок 33а вращения содержит первый ролик 21, пятый ролик 25 и девятый ролик 29.
Второй блок вращения содержит второй ролик 22, шестой ролик 26 и десятый ролик 30.
Третий блок 33c вращения содержит третий ролик 23, седьмой ролик 27 и одиннадцатый ролик 31.
Четвертый блок 33d вращения содержит четвертый ролик 24, восьмой ролик 28 и двенадцатый ролик 32.
На следующих стадиях описания, поскольку первый блок 33а вращения, второй блок вращения, третий блок 33c вращения и четвертый блок 33d вращения идентичны друг другу, будет упоминаться только один элемент 37 вращения, а три ролика соответствующей группы роликов 34 - с целью простоты и лаконичности - обычно будут упоминаться как ролик 41, дополнительный ролик 42 и еще один дополнительный ролик 43.
Предполагается, что в первом блоке 33а вращения ролик 41 соответствует пятому ролику 25, дополнительный ролик 42 соответствует первому ролику 21, а еще один дополнительный ролик 43 соответствует девятому ролику 29.
Аналогично, предполагается, что во втором блоке вращения ролик 41 соответствует шестому ролику 26, дополнительный ролик 42 соответствует второму ролику 22, и еще один дополнительный ролик 43 соответствует десятому ролику 30.
Аналогично предполагается, что в третьем блоке 33c вращения ролик 41 соответствует третьему ролику 23, дополнительный ролик 42 соответствует седьмому ролику 27, и еще один дополнительный ролик 43 соответствует одиннадцатому ролику 31.
Аналогично предполагается, что в четвертом блоке 33d вращения ролик 41 соответствует четвертому ролику 24, дополнительный ролик 42 соответствует восьмому ролику 28, и еще один дополнительный ролик 43 соответствует двенадцатому ролику 32.
Элемент 37 вращения содержит участок 38 вала, который принимает отверстие 39 первой боковой части 36a или второй боковой части 36b. Между участком 38 вала и первой боковой частью 36a или второй боковой частью 36b расположен подшипник 40.
Элемент 37 вращения дополнительно содержит участок 44 кронштейна, который содержит штифт 45, который поддерживает с возможностью вращения ролик 41, и дополнительный штифт 46, который поддерживает с возможностью вращения дополнительный ролик 42.
Элемент 37 вращения дополнительно содержит гнездо 47, которое принимает еще один дополнительный ролик 43.
Элемент 37 вращения содержит еще один дополнительный штифт 48, выступающий в гнездо 47 и поддерживающий с возможностью вращения еще один дополнительный ролик 43.
Оси вращения ролика 41 и дополнительного ролика 42 выровнены на линии L.
Оси вращения ролика 41, дополнительного ролика 42 и еще одного дополнительного ролика 43 расположены в плоскости P.
Минимальное расстояние между роликом 41 и дополнительным роликом 42 меньше, чем ширина первой пластины 5a или второй пластины 5b, измеренная по дополнительной оси Y. Другими словами, минимальное расстояние между роликом 41 и дополнительным роликом 42 меньше, чем расстояние между первой направляющей поверхностью 11a и второй направляющей поверхностью 12a или, соответственно, дополнительной первой направляющей поверхностью 11b и дополнительной второй направляющей поверхностью 12b.
Таким образом, ролик 41 и дополнительный ролик 42 установлены на направляющем элементе с помехой для того, чтобы избегать люфта или зазора между подвижными элементами 3 и направляющим устройством 2.
Во время работы, подвижные элементы 3 движутся на направляющем устройстве 2 независимо друг от друга индивидуально управляемыми соответствующими электромагнитами.
Первый ролик 21, второй ролик 22, третий ролик 23, четвертый ролик 24, пятый ролик 25, шестой ролик 26, седьмой ролик 27, восьмой ролик 28, девятый ролик 29, десятый ролик 30, одиннадцатый ролик 31 и двенадцатый ролик 32 точно направляют подвижные элементы 3 в направлении A продвижения, т.е. вдоль оси Z и предотвращают всякое другое движение подвижных элементов 3 вдоль еще одной дополнительной оси X и дополнительной оси Y, и вокруг еще одной дополнительной оси X, дополнительной оси Y и оси Z.
Благодаря элементам 37 вращения линия L всегда содержится перпендикулярно первой направляющей поверхности 11a и второй направляющей поверхности 12a или, соответственно, дополнительной первой направляющей поверхности 11b и дополнительной второй направляющей поверхности 12b. В частности, когда подвижные элементы 3 движутся вдоль первого изогнутого участка 9 или второго изогнутого участка, линия L всегда ориентирована так, чтобы проходить через центр изгиба первого изогнутого участка 9, или - соответственно - второго изогнутого участка.
Благодаря изобретению можно получить транспортирующее устройство 1, в котором подвижным элементам 3 по существу не разрешается никакое движение друг от друга вдоль направления A продвижения.
В дополнение, вследствие положения первой пары роликов 15, дополнительной первой пары роликов 16, второй пары роликов 17, дополнительной второй пары роликов 18, третьей пары роликов 19 и дополнительной третьей пары роликов 20 транспортирующее устройство 1 обладает большой жесткостью, и подвижные элементы 3 могут нести довольно тяжелые объекты, не ухудшая хорошее позиционирование объектов. В частности, в случае машины, упомянутые выше устройства или инструменты могут точно располагаться также в случае, когда они расположены консольно к подвижным элементам 3 и, вследствие этого, подвижные элементы 3 подвергаются значительным нагрузкам.
В дополнение, благодаря элементам 37 вращения подвижные элементы 3 правильно направляются и вдоль первого линейного участка 7, и второго линейного участка 8, и первого изогнутого участка 9 и второго изогнутого участка.
Ясно, что могут быть сделаны изменения транспортирующего устройства, как описано и проиллюстрировано в данном описании, однако без выхода за пределы объема правовых притязаний настоящего изобретения, как определено в сопровождающей формуле изобретения.
Транспортирующее устройство содержит направляющее устройство (2) и подвижный элемент (3), выполненный с возможностью перемещения вдоль него. Подвижный элемент (3) содержит поддерживающий корпус (14) и пары роликов для скольжения по направляющим поверхностям направляющего устройства (2). Транспортирующее устройство может быть использовано в машине для изготовления упаковок, при этом подвижный элемент (3) служит для поддерживания инструментов в указанной машине и обеспечения их точного позиционирования. 2 н. и 13 з.п. ф-лы, 5 ил.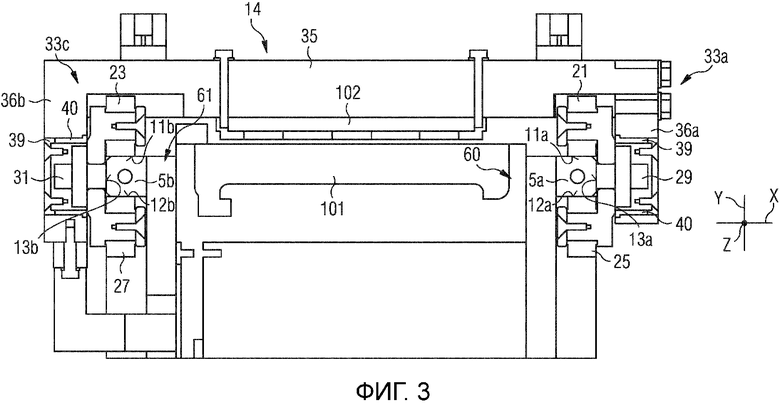
1. Транспортирующее устройство, содержащее направляющее устройство (2) и по меньшей мере один подвижный элемент (3), выполненный с возможностью перемещения вдоль направляющего устройства (2), при этом подвижный элемент (3) содержит поддерживающий корпус (14), направляющее устройство (2) содержит первую направляющую поверхность (11a) и дополнительную первую направляющую поверхность (11b), обращенную к поддерживающему корпусу (14), вторую направляющую поверхность (12a) и дополнительную вторую направляющую поверхность (12b), обращенную от поддерживающего корпуса (14), и третью направляющую поверхность (13a), расположенную поперек первой направляющей поверхности (11a) и второй направляющей поверхности (12a), и дополнительную третью направляющую поверхность (13b), расположенную поперек дополнительной первой направляющей поверхности (11b) и дополнительной второй направляющей поверхности (12b), при этом подвижный элемент (3) содержит первую пару роликов (15), соединенных с возможностью скольжения с первой направляющей поверхностью (11a), дополнительную первую пару роликов (16), соединенных с возможностью скольжения с дополнительной первой направляющей поверхностью (11b), вторую пару роликов (17), соединенных с возможностью скольжения со второй направляющей поверхностью (12a), дополнительную вторую пару роликов (18), соединенных с возможностью скольжения с дополнительной второй направляющей поверхностью (12b), третью пару роликов (19), соединенных с возможностью скольжения с третьей направляющей поверхностью (13a), и дополнительную третью пару роликов (20), соединенных с возможностью скольжения с дополнительной третьей направляющей поверхностью (13b), отличающееся тем, что указанное транспортирующее устройство дополнительно содержит четыре блока (33) вращения, каждый из которых поддерживает группу из трех роликов (34), причем каждая группа из трех роликов (34) содержит ролик (41; 42), относящийся к первой паре роликов (15) или к дополнительной первой паре роликов (16), дополнительный ролик (42; 41), относящийся ко второй паре роликов (17) или, соответственно, к дополнительной второй паре роликов (18), и еще один дополнительный ролик (43), относящийся к третьей паре роликов (19) или, соответственно, к дополнительной третьей паре роликов (20).
2. Транспортирующее устройство по п.1, в котором первая направляющая поверхность (11a) и дополнительная первая направляющая поверхность (11b) взаимно выровнены, при этом вторая направляющая поверхность (12a) и дополнительная вторая направляющая поверхность (12b) взаимно выровнены и параллельны первой направляющей поверхности (11a) и дополнительной первой направляющей поверхности (11b) и при этом третья направляющая поверхность (13a) перпендикулярна первой направляющей поверхности (11a) и второй направляющей поверхности (12a), а дополнительная третья направляющая поверхность (13b) перпендикулярна дополнительной первой направляющей поверхности (11b) и дополнительной второй направляющей поверхности (12b).
3. Транспортирующее устройство по п.1 или 2, в котором оси вращения роликов первой пары роликов (15) перпендикулярны третьей направляющей поверхности (13a) и дополнительной третьей направляющей поверхности (13b), при этом оси вращения роликов дополнительной первой пары роликов (16) перпендикулярны третьей направляющей поверхности (13a) и дополнительной первой направляющей поверхности (13b), при этом оси вращения роликов второй пары роликов (17) перпендикулярны третьей направляющей поверхности (13a) и дополнительной третьей направляющей поверхности (13b), при этом оси вращения роликов дополнительной второй пары роликов (18) перпендикулярны третьей направляющей поверхности (13a) и дополнительной второй направляющей поверхности (13b), при этом оси вращения роликов третьей пары роликов (19) перпендикулярны первой направляющей поверхности (11a), дополнительной первой направляющей поверхности (11b), второй направляющей поверхности (12a) и дополнительной второй направляющей поверхности (12b) и при этом оси вращения роликов дополнительной третьей пары роликов (20) перпендикулярны первой направляющей поверхности (11a), дополнительной первой направляющей поверхности (11b), второй направляющей поверхности (12a) и дополнительной второй направляющей поверхности (12b).
4. Транспортирующее устройство по любому из предшествующих пунктов, в котором вторая направляющая поверхность (12a) расположена на противоположной стороне поддерживающего корпуса (14) относительно первой направляющей поверхности (11a), и при этом дополнительная вторая направляющая поверхность (12b) расположена на противоположной стороне поддерживающего корпуса (14) относительно дополнительной первой направляющей поверхности (11b).
5. Транспортирующее устройство по любому из предшествующих пунктов, в котором блок (33) вращения содержит элемент (37) вращения, который соединен с возможностью вращения с поддерживающим корпусом (14) и является вращающимся вокруг оси вращения, перпендикулярной третьей направляющей поверхности (13a) и дополнительной третьей направляющей поверхности (13b).
6. Транспортирующее устройство по п.5, в котором элемент (37) вращения содержит участок (44) кронштейна, снабженный штифтом (45; 46), который поддерживает с возможностью вращения ролик (41; 42), и дополнительным штифтом (46; 45), который поддерживает с возможностью вращения дополнительный ролик (42; 41).
7. Транспортирующее устройство по п.5 или 6, в котором элемент (37) вращения дополнительно содержит гнездо (47), которое принимает еще один дополнительный ролик (43), и еще один дополнительный штифт (48), выступающий в гнездо (47) и поддерживающий с возможностью вращения еще один дополнительный ролик (43).
8. Транспортирующее устройство по любому из предшествующих пунктов, в котором оси вращения ролика (41; 42) и дополнительного ролика (42; 41) выровнены на линии (L), которая при перемещении подвижного элемента (3) по направляющему устройству (2) остается перпендикулярной первой направляющей поверхности (11a), дополнительной первой направляющей поверхности (11b), второй направляющей поверхности (12a) и дополнительной второй направляющей поверхности (12b).
9. Транспортирующее устройство по любому из предшествующих пунктов, в котором оси вращения ролика (41; 42), дополнительного ролика (42; 41) и указанного еще одного дополнительного ролика (43) расположены в плоскости (P).
10. Транспортирующее устройство по любому из предшествующих пунктов, в котором первая пара роликов (15) содержит первый ролик (21) и второй ролик (22), дополнительная первая пара роликов (16) содержит третий ролик (23) и четвертый ролик (24), вторая пара роликов (17) содержит пятый ролик (25) и шестой ролик (26), дополнительная вторая пара роликов (18) содержит седьмой ролик (27) и восьмой ролик (28), третья пара роликов (19) содержит девятый ролик (29) и десятый ролик (30), а дополнительная третья пара роликов (20) содержит одиннадцатый ролик (31) и двенадцатый ролик (32).
11. Транспортирующее устройство по п.10, в котором указанный подвижный элемент (3) содержит четыре блока (33) вращения, первый блок (33a) вращения указанных четырех блоков (33) вращения, содержащий первый ролик (21), пятый ролик (25) и девятый ролик (29), второй блок вращения указанных четырех блоков (33) вращения, содержащий второй ролик (22), шестой ролик (26) и десятый ролик (30), третий блок (33c) вращения указанных четырех блоков (33) вращения, содержащий третий ролик (23), седьмой ролик (27) и одиннадцатый ролик (31), четвертый блок вращения (33d) указанных четырех блоков (33) вращения, содержащий четвертый ролик (24), восьмой ролик (28) и двенадцатый ролик (32).
12. Транспортирующее устройство по п.11, в котором поддерживающий корпус (14) содержит переднюю часть (35) и первую боковую часть (36a) и вторую боковую часть (36b), выступающие из противоположных сторон передней части (35), причем первый блок (33a) вращения и второй блок вращения соединены с возможностью вращения с первой боковой частью (36a), а третий блок (33c) вращения и четвертый блок вращения (33d) соединены с возможностью вращения со второй боковой частью (36b).
13. Транспортирующее устройство по любому из предшествующих пунктов, в котором направляющее устройство (2) содержит направляющий элемент (4), причем направляющий элемент (4) на своей первой стороне снабжен первой направляющей поверхностью (11a), второй направляющей поверхностью (12a) и третьей направляющей поверхностью (13a), причем направляющий элемент (4) на своей второй стороне, расположенной напротив первой стороны, дополнительно снабжен дополнительной первой направляющей поверхностью (11b), дополнительной второй направляющей поверхностью (12b) и дополнительной третьей направляющей поверхностью (13b), причем направляющий элемент (4) имеет первый линейный участок (7), второй линейный участок (8), первый изогнутый участок (9) и второй изогнутый участок, причем первый изогнутый участок (9) и второй изогнутый участок расположены между первым линейным участком (7) и вторым линейным участком (8).
14. Транспортирующее устройство по любому из предшествующих пунктов, содержащее множество подвижных элементов (3), причем направляющее устройство (2) содержит индивидуально возбуждаемые электромагниты, а подвижные элементы (3) содержат постоянные магниты (3) или подвижные элементы (3) содержат индивидуально возбуждаемые электромагниты, а направляющее устройство (2) содержит постоянные магниты, причем подвижные элементы (3) выполнены с возможностью независимого перемещения вдоль направляющего устройства (2) индивидуально управляемыми электромагнитами.
15. Упаковочная машина для изготовления упаковок из упаковочного материала, причем упаковочная машина содержит множество инструментов, выполненных с возможностью выполнения работы с упаковочным материалом, при этом упаковочная машина дополнительно содержит транспортирующее устройство по п.14, при этом каждый из указанных подвижных элементов (3) поддерживает один из инструментов.
| US 4716346 A, 29.12.1987 | |||
| ПОРТАТИВНОЕ ПРОТОЧНОЕ УСТРОЙСТВО ДЛЯ АНАЛИЗА ЖИДКИХ ФАЗ | 2008 |
|
RU2367938C1 |
| WO 00/64751 A1, 02.11.2000 | |||
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ЛЕКАРСТВА, СОДЕРЖАЩЕЕ ЗАПОРНЫЙ МЕХАНИЗМ, ИМЕЮЩИЙ РЫЧАГ | 2012 |
|
RU2560904C2 |

