Изобретение относится к средствам создания и совершенствования системы физической защиты (СФЗ) на важном государственном объекте (ВГО) и предназначено для проведения оценки эффективности (ОЭ) существующей или проектируемой СФЗ с целью выбора наиболее эффективных путей ее совершенствования с учетом принятой на объекте модели нарушителя.
Эффективность СФЗ определяется ее способностью пресечь несанкционированные действия нарушителей в отношении ВГО. Численным значением, характеризующим эффективность СФЗ, является показатель эффективности системы. В качестве показателя эффективности системы принимается вероятность пресечения СФЗ акции нарушителя. Величина показателя эффективности определяется в ходе проведения ОЭ СФЗ ВГО. Возможности любой штатной СФЗ ВГО по противодействию несанкционированным действиям нарушителей определяются особенностями построения и функционирования данной системы. Под штатной системой физической защиты понимается система, организованная в соответствии с требованиями нормативных документов России в области обеспечения физической защиты ВГО.
Возникновение новых и развитие уже существующих путей реализации угроз в отношении ВГО формирует необходимость совершенствования существующих способов оценки эффективности СФЗ. К разряду новых путей реализации угроз следует относить применение беспилотных летательных аппаратов (БПЛА) в качестве элементов внешнего воздействия на ВГО.
Однако в составе штатной СФЗ ВГО требованиями не предусматривается наличие специализированных средств радиоэлектронной борьбы (РЭБ) для противодействия БПЛА. Решение задачи создания эффективной СФЗ, способной обнаруживать и пресекать полеты БПЛА, заключается в выборе такой конфигурация штатной СФЗ на основании данных ОЭ, которая бы позволяла без применения средств РЭБ обеспечивать необходимый и достаточный уровень защищенности ВГО.
Известен способ оценки эффективности СФЗ ВГО (Бояринцев А.В., Бражник А.Н., Зуев А.Г. Проблемы антитерроризма: категорирование и анализ уязвимости объектов. - СПб.: ЗАО «НПП «ИСТА-Системс», 2006. - c. 40-44).
В качестве показателя эффективности в известном способе рассматривается вероятность пресечения акции нарушителей Рпр. В общем случае пресечение рассматривается как совокупность событий обнаружения нарушителя средствами СФЗ, его задержки при продвижении к цели совершения несанкционированного действия и последующего реагирования и нейтрализации действий нарушителя. При таком подходе вероятность пресечения несанкционированного действия нарушителя СФЗ описывается формулой
Pпр=PобнPзадPнейтр,
где Робн - вероятность своевременного обнаружения несанкционированных действий нарушителя. Определяется характеристиками технических средств обнаружения и возможностями сил охраны: в первом случае она может быть получена с использованием технических характеристик средств обнаружения, во втором - на основе имеющейся статистики или в результате моделирования;
Рзад - вероятность задержки и замедления продвижения нарушителя. Представляет собой квантиль случайной величины времени задержки, то есть вероятность того, что задержка t будет не меньше заданной величины (tзад)
Рзад=P(t≥tзад),
Вычисление Рзад, как правило, осуществляется с использованием моделирования и требует знания временных характеристик способов преодоления физических барьеров различными нарушителями, отличающимися тактикой действия, специальной подготовкой, оснащенностью техническими средствами и т.д.
Pнейтр - вероятность нейтрализации нарушителя силами охраны. Представляет собой квантиль случайной величины, образующейся на срезе реализации случайных функций, определенных как «нейтрализация» в фиксированный момент времени t. Для определения значения Рнейтр обычно используется моделирование на основе специальных программ.
Известный способ оценки эффективности был предложен с учетом требований нормативно-правовых документов Российской Федерации в области физической защиты, которые определяли структуру СФЗ ВГО без учета критерия ее эффективного противодействия угрозам, реализуемым с помощью БПЛА. К разряду новых путей реализации угроз следует относить применение беспилотных летательных аппаратов (БПЛА) в качестве элементов внешнего воздействия на ВГО.
Известный способ выбран заявителем в качестве прототипа.
Недостатком известного способа является его неприменимость для оценки эффективности СФЗ ВГО при возникновении угроз, реализуемых с помощью БПЛА, так как характер взаимодействия БПЛА с СФЗ отличается от характера взаимодействия наземных объектов с СФЗ (например, диверсионно-террористической группы, осуществляющей силовую акцию прорыва). При использовании БПЛА в качестве инструмента реализации угрозы функция СФЗ по задержке продвижения нарушителя теряет свою актуальность.
В составе штатной СФЗ ВГО требованиями нормативных документов в области физической защиты не предусматривается наличие специализированных средств радиоэлектронной борьбы (РЭБ) для противодействия БПЛА. Решение задачи создания эффективной штатной СФЗ, способной обнаруживать и пресекать полеты БПЛА, заключается в выборе такой конфигурация на основании данных ОЭ, которая бы позволяла без применения средств РЭБ обеспечивать необходимый и достаточный уровень защищенности ВГО.
Модернизация СФЗ ВГО производится на основании показателя ее эффективности. Отсутствие способа, позволяющего достоверно определять возможности системы по противодействию актуальным угрозам, в том числе реализуемым с помощью БПЛА, значительно затрудняет поддержание СФЗ в состоянии постоянной готовности к обеспечению безопасного функционирования ВГО. Это, как следствие, влияет на антитеррористическую (противодиверсионную) защищенность стратегических объектов страны.
Задачей, на решение которой направлен предлагаемый способ, является определение уязвимых мест в СФЗ ВГО при применении нарушителями БПЛА, а также выбор наиболее оптимальных путей совершенствования штатной СФЗ по критерию эффективного противодействия угрозам, реализуемым с помощью БПЛА.
Для решения поставленной задачи в известном способе оценки эффективности СФЗ ВГО, содержащей рубежи охраны с расставленными на них часовыми с различными уровнями подготовленности (низкий, высокий) и возможностью взаимодействия между ними, при рассмотрении реализуемых с помощью малоразмерных БПЛА угроз, включающим моделирование, эффективность СФЗ, характеризующуюся вероятностью пресечения реализуемого с помощью БПЛА несанкционированного действия нарушителя по отношению к ВГО и являющуюся функцией, зависимой от вероятностей пресечения несанкционированного действия каждым часовым, определяющихся как произведение вероятностей обнаружения (Робн.j) и поражения (Рпораж.j) малоразмерного БПЛА для часового, определяют по формуле
где С - коэффициент взаимодействия (равен 0, если взаимодействие не организовано; равен 1, если между часовыми организовано взаимодействие);
N - количество постов часовых (для случая, когда известно направление траектории БПЛА) или рубежей охраны (для случая, когда неизвестно направление траектории БПЛА), через которые пройдет траектория БПЛА при движении к цели совершения несанкционированного действия;
Pj - вероятность наступления события, когда БПЛА обнаруживается и нейтрализуется j-м часовым (для случая, когда известно направление траектории БПЛА) или при прохождении через j-й рубеж охраны (для случая, когда неизвестно направление траектории БПЛА);
 - вероятность наступления события, когда БПЛА обнаруживается, но не нейтрализуется j-м часовым (для случая, когда известно направление траектории БПЛА) или при прохождении через j-й рубеж охраны (для случая, когда неизвестно направление траектории БПЛА);
- вероятность наступления события, когда БПЛА обнаруживается, но не нейтрализуется j-м часовым (для случая, когда известно направление траектории БПЛА) или при прохождении через j-й рубеж охраны (для случая, когда неизвестно направление траектории БПЛА);
 - вероятность наступления события, когда БПЛА нейтрализуется j-м часовым после обнаружения (j-1)-м часовым (для случая, когда известно направление траектории БПЛА), или нейтрализуется при прохождении через j-й рубеж охраны после обнаружения на (j-1)-м рубеже охраны (для случая, когда неизвестно направление траектории БПЛА).
- вероятность наступления события, когда БПЛА нейтрализуется j-м часовым после обнаружения (j-1)-м часовым (для случая, когда известно направление траектории БПЛА), или нейтрализуется при прохождении через j-й рубеж охраны после обнаружения на (j-1)-м рубеже охраны (для случая, когда неизвестно направление траектории БПЛА).
Использование предложенной формулы вместе с геометрическими построениями областей пространства визуального обнаружения и поражения БПЛА огнем стрелкового оружия часовых на выполненной в масштабе схеме объекта позволяет учесть характер взаимодействия БПЛА с СФЗ конкретного ВГО. При этом учитывается характер перемещения БПЛА на удалении от поверхности земли в воздушном пространстве над охраняемой территорией ВГО, где функция СФЗ «задержка» теряет свою актуальность. Функция «реагирование» будет значительно отличаться по своей функциональной составляющей от случая, когда воздействие на СФЗ осуществляется наземными элементами. Кроме того, учитывается наличие или отсутствие возможности взаимодействия между часовыми в СФЗ. Таким образом, предложенные формулы позволяют получать достоверные результаты моделирования взаимодействия в системе «нарушитель - СФЗ» и выбирать наиболее эффективные пути совершенствования СФЗ ВГО при соблюдении критериев адекватности принятой модели нарушителей и рационального расходования денежных средств.
Далее рассмотрены частные случаи определения значений вероятностей визуального обнаружения Pобн.j и поражения Рпораж.j малоразмерной летательной цели часовым в СФЗ ВГО.
Предельную дальность визуального обнаружения БПЛА (SР) определяют как расстояние от часового до БПЛА, при превышении которого БПЛА не может быть обнаружен часовым визуальным способом без использования специальных оптических приборов. Предельная дальность видимости определяет границу области пространства визуального обнаружения, образованную центральным углом в горизонтальной плоскости, равным 360°. Вероятность обнаружения (Робн.j) БПЛА, пересекшего границу области пространства визуального обнаружения часового, равна 0,19. Предельная дальность визуального обнаружения БПЛА определяется с помощью системы уравнений
где ε - порог контрастной чувствительности зрения;
SМ - метеорологическая дальность видимости;
K0 - контраст объекта при отсутствии дымки;
D - максимальный линейный размер предмета;
Lкр - критическое расстояние от часового до БПЛА, определяемое угловыми размерами в 15°.
При детальном изучении данной системы видно, что первое выражение для 5 является критерием, не учитывающим размеры обнаруживаемого объекта. Данный показатель отвечает за обнаружение и распознавание БПЛА исходя из погодных условий, а также порога контрастной чувствительности человеческого зрения. Второе выражение определяет визуальный порог обнаружения БПЛА исходя из его габаритных размеров. В качестве значения предельной дальности видимости SP выбирается наименьшая величина из Lкр и S. При определении предельной дальности видимости также учитывается способ ведения наблюдения за воздушным пространством, влияющий на величину ε.
Использование предложенной формулы позволяет учесть влияние оптических свойств атмосферы, габаритных размеров БПЛА, а также особенностей зрительного анализатора человека, влияющих на вероятность обнаружения БПЛА часовым. Тем самым, учет множества параметров различной природы позволяет получать достоверные результаты моделирования взаимодействия в системе «нарушитель - СФЗ».
Большинство реальных летательных аппаратов имеют сложную форму. Вероятность попадания в сложные по геометрической форме цели можно вычислить способом замены цели эквивалентным прямоугольником. В качестве допущения принимается, что цель по форме близка к указанной правильной геометрической фигуре. Стороны эквивалентного прямоугольника можно вычислить с помощью формул
где Sц - площадь цели;
2х, 2у - стороны описанного вокруг цели прямоугольника.
Вероятность поражения БПЛА часовым при соблюдении условия, что среднее необходимое число попаданий для поражения цели равно 1, определяют по формуле академика А.Н. Колмогорова

где 
 - смещения центра рассеивания (средней точки попадания) относительно центра цели по высоте и в боковом направлении;
- смещения центра рассеивания (средней точки попадания) относительно центра цели по высоте и в боковом направлении;
Evy, Evz - предельные суммарные срединные ошибки выстрела;
ε(t) - специальная функция параметра t;
n - количество выстрелов в автоматической очереди;
 - постоянная величина, равная 0,0724 (ρ=0,4769 - постоянная нормального закона).
- постоянная величина, равная 0,0724 (ρ=0,4769 - постоянная нормального закона).
Для определения суммарных срединных ошибок выстрела Evy, Evz используют таблицы стрельбы для конкретных образцов оружия.
Использование предложенной формулы позволяет учесть влияние уровня индивидуальной подготовленности часовых в СФЗ (за счет учета ошибок ведения стрельбы), габаритных размеров типа вооружения и режимов его эксплуатации, скорости перемещения цели на вероятность поражения БПЛА. Тем самым, учет множества параметров различной природы позволяет получать достоверные результаты моделирования взаимодействия в системе «нарушитель - СФЗ».
Вероятность поражения БПЛА несколькими очередями j-го часового, когда известна траектория БПЛА, определяют по формуле

где q - количество очередей;
Wn 1, Wn 2, Wn k - вероятность поражения цели первой, второй и т.д. очередями;
s1, s2, si - количество очередей с одинаковыми значениями вероятностей поражения Wn 1, Wn 2, Wn k соответственно.
С помощью определенных значений вероятностей визуального обнаружения Ро6н.j и нейтрализации Pнейтр.j цели для j-го часового может быть определена вероятность пресечения Рпр.j j-м часовым внешних воздействий на ВГО, реализуемых с помощью малоразмерного БПЛА
Pпр.j=Pобн.jPнейтр.j
По ходу развития сценария внешнего воздействия на исследуемую систему траектория БПЛА может пересекать области визуального обнаружения и огневого воздействия нескольких часовых. В таком случае задача определения значений вероятностей пресечения внешнего воздействия должна решаться с учетом факта отсутствия или наличия организованного взаимодействия между часовыми, а также индивидуальных особенностей построения СФЗ ВГО.
Предлагаемый способ осуществляют в следующей последовательности.
Предлагаемый способ поясняется чертежами, представленными на фиг. 1, фиг. 2, фиг. 3 и фиг. 4:
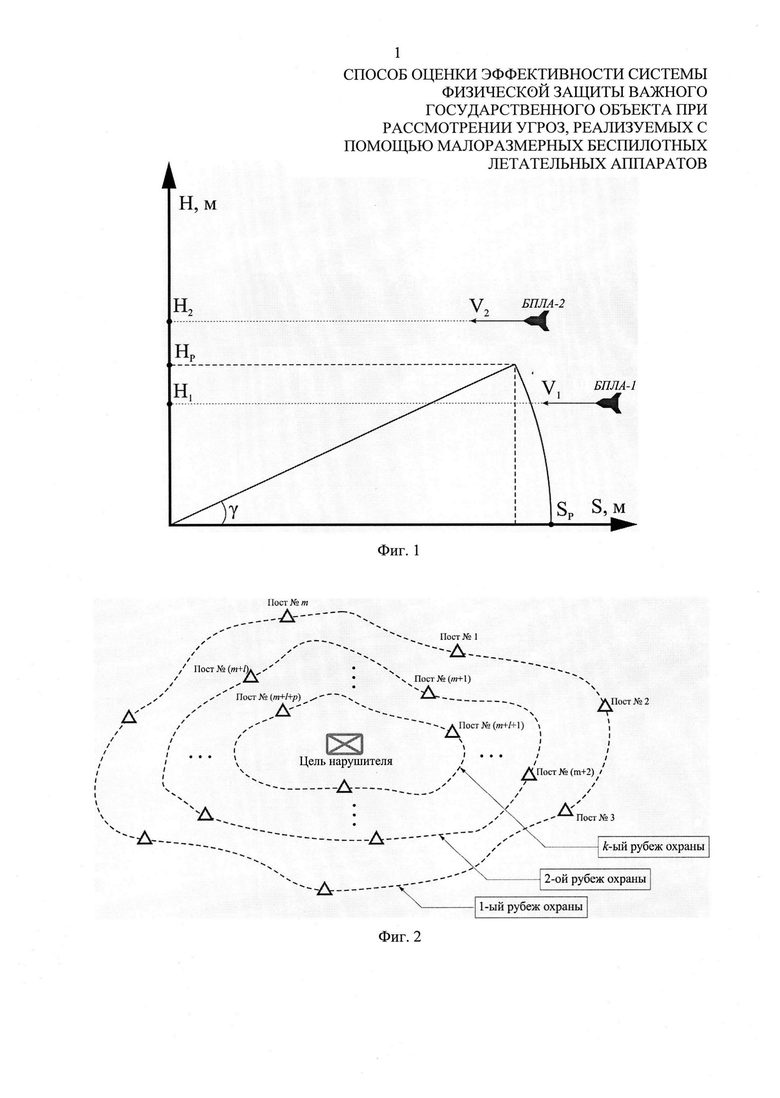
на фиг. 1 показана форма области обнаружения летательного аппарата часовым в вертикальной плоскости;
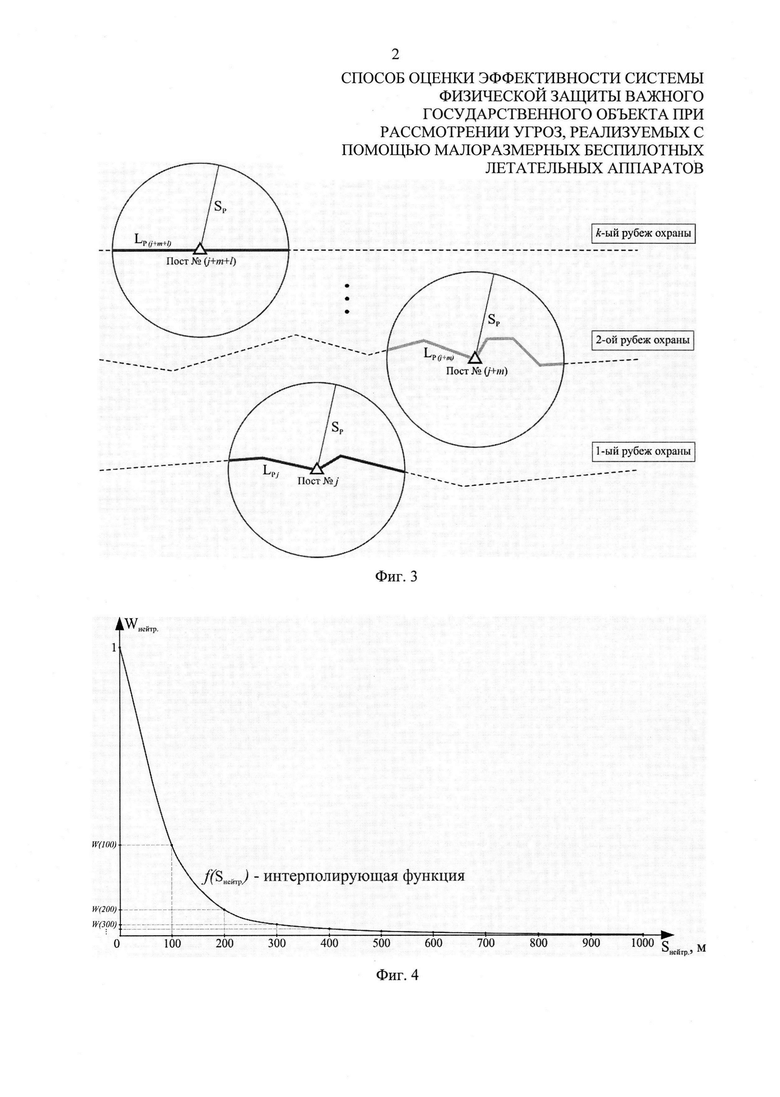
на фиг. 2 - реализация принципа эшелонированного построения системы физической защиты;
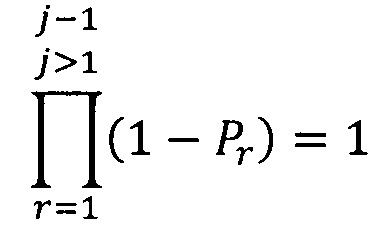
на фиг. 3 - зоны обнаружения и поражения постов часовых в системе физической защиты;
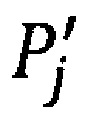
на фиг. 4 - вид интерполирующей функции зависимости вероятности поражения цели ƒ(Sнейтр.) от расстояния от часового до цели Sнейтр.
Расчет показателя эффективности СФЗ при противодействии угрозам, реализуемым с помощью малоразмерных БПЛА, осуществляют с помощью моделирования взаимодействия в системе «нарушитель - СФЗ», включающего элементы теории вероятностей и графические построения. Использование графических построений обусловлено необходимостью учета индивидуальных особенностей ВГО, таких как тип местности в районе расположения объекта и размещение постов часовых в системе охраны, их радиусов зон визуального обнаружения и поражения БПЛА.
Пилот-оператор летательного аппарата, осуществляющий его дистанционное управление, как правило, находится за пределами ВГО, на который он оказывает воздействие. Объектом воздействия является малоразмерный БПЛА, обладающий набором свойств и параметров, таких как высота и скорость перемещения, массогабаритные характеристики, грузоподъемность, маневренность и т.д. В рамках данного способа считается, что БПЛА движется прямолинейно и равномерно на неизменной высоте.
В качестве начальных условий экспертным методом определяют предполагаемые тип беспилотного летательного аппарата, его скорость и высоту перемещения. На схеме рассматриваемого объекта, выполненной в масштабе, наносят цели нарушителя. Показатель эффективности СФЗ определяют для каждой из рассматриваемых целей. В том случае, если известен предполагаемый район вне охраняемой территории объекта, с которого планируется запуск нарушителем БПЛА, траектория летательного аппарата может быть однозначно определена и нанесена на схему объекта. На схему также наносят расположение постов часовых, вооруженных автоматическим стрелковым оружием. Для каждого поста определяют радиус зоны визуального обнаружения и поражения БПЛА. Размеры зон в соответствии с выбранным масштабом наносят на схему объекта соответственно для каждого часового.
Значение радиуса зоны визуального обнаружения определяют с помощью системы уравнений. При этом принимается во внимание тот факт, что обнаружение летательных аппаратов часовым осуществляется без использования специальной аппаратуры или оптических приборов. Это обусловлено тем, что часовые подразделений, несущих службу по охране ВГО, как правило, не оснащены приборами или аппаратурой, позволяющими вести наблюдение за удаленными предметами и областями пространства. Все элементы СФЗ находятся в одинаковых условиях окружающей среды. Значение предельной высоты визуального обнаружения определяют исходя из значения радиуса зоны визуального обнаружения и угла γ между горизонталью и верхней границей сектора обзора в вертикальной плоскости для человека (равен 25°).
Таким образом, на основании известных значений предельных высоты и дальности визуального обнаружения определяют форму сектора пространства визуального обнаружения БПЛА (фиг. 1). Любой объект, оказавшийся в границах данного сектора (центральный угол в горизонтальной плоскости составляет 70°), будет обнаружен часовым с вероятностью, равной 1. Так как направление визуального наблюдения для часового в каждый конкретный момент времени является неизвестным, вероятность обнаружения цели в каждом из возможных направлений (центральный угол в горизонтальной плоскости составляет 360°) считается одинаковой и принимает значение, равное 0,19.
Единственно возможным способом противодействия БПЛА со стороны штатных систем безопасности остается применение огнестрельного оружия, осуществляемое силами охраны. Радиус зоны поражения огнем ручного автоматического стрелкового оружия для малоразмерных БПЛА в силу их незначительных габаритных размеров принимают равным значению предельной дальности обнаружения БПЛА SP. Зона поражения, в отличие от зоны обнаружения, имеет форму полусферы.
Ввиду высокой значимости каждого элемента малоразмерного БПЛА для выполнения поставленной задачи, принято допущение, что достаточно одного попадания снаряда с высокой кинетической энергией (пули) для того, чтобы поразить БПЛА. Для вычисления вероятности хотя бы одного попадания в прямоугольную цель используют формулу, полученную академиком А.Н. Колмогоровым.
Учет в формуле Колмогорова ошибок стрельбы позволяет делать поправки на подготовленность часовых, осуществляющих ведение огня из огнестрельного оружия для поражения целей. Для уменьшения количества математических расчетов допускается принять смещения центра рассеивания (средней точки попадания) относительно центра цели по высоте и в боковом направлении равными нолю.
По ходу продвижения БПЛА в воздушном пространстве над охраняемой территорией объекта его траектория может пересекать зоны визуального обнаружения и поражения нескольких часовых.
Представленный способ позволяет оценивать эффективность СФЗ по противодействию угрозам, реализуемым с помощью БПЛА, для двух случаев: когда известна траектория движения БПЛА и когда направление возникновения предполагаемого воздействия на ВГО неизвестно.
1) Для первого случая графически строят траекторию БПЛА к предполагаемой цели нарушителя. Линия траектории будет пересекать зоны визуального обнаружения и поражения огнем стрелкового оружия часовых. Радиусы зон равны SP, при этом учитывается высота перемещения БПЛА, выбранная в качестве начальных условий проведения оценки эффективности СФЗ. В том случае, если линия траектории пересекает зону обнаружения БПЛА на определенной высоте, можно считать, что БПЛА был обнаружен часовым с вероятностью, равной 0,19. Немаловажную роль играет факт наличия или отсутствия связи между часовыми. Если связь между часовыми отсутствует, события обнаружения БПЛА каждым часовым должны рассматриваться как независимые.
Если часовые имеют возможность взаимодействия, при проникновении БПЛА в воздушное пространство над охраняемой территорией объекта информация о нем (габаритные размеры, скорость, высота и направление перемещения) передается от обнаружившего ее часового последующим. Таким образом, обнаружение БПЛА каждым последующим часовым можно рассматривать как зависимое событие от предшествующих событий, а его вероятность будет являться условной.
Линия траектории БПЛА также будет пересекать зоны поражения огнем стрелкового оружия часовых. Учитывают длительность нахождения БПЛА в каждой конкретной зоне поражения при известной скорости перемещения. Данный параметр влияет на количество очередей, которые успеет сделать часовой по летящей цели. Он может быть определен с помощью графических построений. Время между очередями определяют исходя из подготовленности часовых с помощью существующих таблиц стрельбы.
2) Второй случай предполагает, что направление возникновения воздействия на ВГО с помощью БПЛА неизвестно. СФЗ рассматривают как систему, включающую в себя множество последовательно расположенных рубежей, организованных перед целью нарушителя (принцип эшелонированной защиты) (фиг. 2). На каждом из рубежей расположено некоторое известное число постов часовых. Каждый пост имеет области обнаружения и поражения летательного аппарата с радиусом SP (фиг. 3).
Для данного случая траектория цели неизвестна, а следовательно, невозможно с уверенностью сказать, на каком расстоянии от часового она окажется. На основании этого считается верным утверждение, что появление цели на любом расстоянии от центра зоны поражения на высоте H в ее пределах будет являться событием равновероятным.
Рассматривают график функции ƒ(Sнейтр.), полученной в результате интерполяции дискретных значений вероятности поражения цели и соответствующих им значений расстояния от часового до цели. Зависимость вероятности поражения цели часовым от расстояния до цели носит нелинейный характер, а функция графика является убывающей (фиг. 4).
Функция ƒ(Sнейтр.) является функцией непрерывной случайной величины, т.к. величина Sнейтр. в случае, когда известна лишь конечная точка движения цели, может принимать любые значения из интервала [0; R].
Количество очередей, выпущенных часовым по БПЛА, определяют в зависимости от принятой в качестве начального условия высоты прохождения траектории летательного аппарата. Значению WM соответствует некоторое значение расстояния от часового до цели SM. Для определения вероятности поражения БПЛА рассматривается прохождение его траектории в вертикальном сечении полусферы области поражения, образованном прохождением секущей плоскости через точку SM. Вероятность нейтрализации БПЛА j-м часовым будет определяться в соответствии с разделом способа, применяемым при известной траектории БПЛА.
В соответствии с законодательством Российской Федерации, основными целевыми задачами СФЗ на ВГО являются своевременное обнаружение несанкционированных действий, задержка (замедление) продвижения нарушителя и пресечение несанкционированных действий путем задержания или нейтрализации лиц, причастных к подготовке или совершению несанкционированных действий. Учитывая тот факт, что перемещение объекта воздействия происходит на значительном удалении от поверхности земли в воздушном пространстве над охраняемой территорией объекта, функция СФЗ «задержка» теряет свою актуальность, а функция «реагирование» будет значительно отличаться по своей функциональной составляющей от случая, когда воздействие на СФЗ осуществляется наземными элементами. Обосновано утверждение, что в воздушном пространстве отсутствуют физические барьеры, способные замедлить продвижение летательных аппаратов к их цели. Исходя из этого, можно говорить только о возможности обнаружения и противодействия со стороны СФЗ. Тогда показатель эффективности СФЗ, имеющий физический смысл вероятности пресечения несанкционированного действия нарушителя по отношению к ВГО, определяют исходя из способности каждого часового пресечь сценарий злонамеренной акции, реализуемой с помощью малоразмерного БПЛА. В свою очередь, вероятность пресечения полета воздушной цели одиночным часовым определяют как произведение вероятностей обнаружения (Робн.j) и поражения (Рпораж.j).
Внедрение предлагаемого способа оценки эффективности СФЗ ВГО при рассмотрении угроз, реализуемых с помощью БПЛА, позволит достоверно определять возможности системы по противодействию актуальным угрозам, в частности реализуемым с помощью БПЛА. Результаты проведенной оценки эффективности используются в качестве начальных условий в процессе модернизации для поддержания СФЗ в состоянии постоянной готовности к обеспечению безопасного функционирования ВГО. Такой подход к обеспечению безопасного функционирования ВГО является приоритетным и служит ключом к обеспечению безопасности страны в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ЭФФЕКТИВНОСТИ СИСТЕМЫ ФИЗИЧЕСКОЙ ЗАЩИТЫ ВАЖНОГО ГОСУДАРСТВЕННОГО ОБЪЕКТА | 2019 |
|
RU2724909C1 |
| Способ оценки уровня защищенности охраняемой территории от угроз проникновения нарушителей | 2019 |
|
RU2719506C1 |
| Малообслуживаемая система физической защиты объектов | 2018 |
|
RU2708509C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| Способ активной защиты объекта со стороны верхней полусферы от множественных атак БПЛА | 2022 |
|
RU2784092C1 |
| СПОСОБ АКТИВНОЙ ЗАЩИТЫ ОБЪЕКТА СО СТОРОНЫ ВЕРХНЕЙ ПОЛУСФЕРЫ | 2020 |
|
RU2755951C1 |
| СПОСОБ ОХРАНЫ ОБЪЕКТОВ ОТ ПРОНИКНОВЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМЫХ МАЛОРАЗМЕРНЫХ МАЛОВЫСОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ТИПА БПЛА) | 2019 |
|
RU2744497C2 |
| Способ обнаружения и защиты от дистанционно управляемых малоразмерных маловысотных беспилотных летательных аппаратов (типа мультикоптеров) | 2023 |
|
RU2820340C1 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
Изобретение относится к ядерной технике, в частности к средствам создания и совершенствования системы физической защиты (СФЗ) на важном государственном объекте (ВГО), и предназначено для проведения оценки эффективности (ОЭ) существующей или проектируемой СФЗ с целью выбора наиболее эффективных путей ее совершенствования с учетом принятой на объекте модели нарушителя. Оценка эффективности СФЗ при противодействии угрозам, реализуемым с помощью БПЛА, осуществляется с помощью моделирования взаимодействия в системе «нарушитель - СФЗ», включающего элементы теории вероятностей и графические построения. Использование графических построений обусловлено необходимостью учета индивидуальных особенностей ВГО, таких как тип местности в районе расположения объекта и размещение постов часовых в системе охраны, их радиусов зон визуального обнаружения и поражения БПЛА. Задачей, на решение которой направлен предлагаемый способ, является определение уязвимых мест в СФЗ ВГО при применении нарушителями малоразмерных БПЛА, а также выбор оптимальных путей совершенствования штатной СФЗ по критерию эффективного противодействия угрозам, реализуемым с помощью БПЛА. 4 з.п. ф-лы, 4 ил.
1. Способ оценки эффективности системы физической защиты (СФЗ) важного государственного объекта (ВГО), содержащей рубежи охраны с расставленными на них часовыми с различными уровнями подготовленности и возможностью взаимодействия между ними, при рассмотрении реализуемых с помощью малоразмерных БПЛА угроз, включающий моделирование, отличающийся тем, что эффективность СФЗ, характеризующуюся вероятностью пресечения реализуемого с помощью БПЛА несанкционированного действия нарушителя по отношению к ВГО и являющуюся функцией, зависимой от вероятностей пресечения несанкционированного действия каждым часовым, определяющихся как произведение вероятностей обнаружения (Робн.j) и поражения (Рпораж.j) малоразмерного БПЛА для часового, определяют по формуле

при j=1,
где С - коэффициент взаимодействия равен 0, если взаимодействие не организовано; равен 1, если между часовыми организовано взаимодействие;
N - количество постов часовых для случая, когда известно направление траектории БПЛА, или рубежей охраны для случая, когда неизвестно направление траектории БПЛА, через которые пройдет траектория БПЛА при движении к цели совершения несанкционированного действия;
Pj - вероятность наступления события, когда БПЛА обнаруживается и нейтрализуется j-м часовым для случая, когда известно направление траектории БПЛА, или при прохождении через j-й рубеж охраны для случая, когда неизвестно направление траектории БПЛА;
 - вероятность наступления события, когда БПЛА обнаруживается, но не нейтрализуется j-м часовым для случая, когда известно направление траектории БПЛА, или при прохождении через j-й рубеж охраны для случая, когда неизвестно направление траектории БПЛА;
- вероятность наступления события, когда БПЛА обнаруживается, но не нейтрализуется j-м часовым для случая, когда известно направление траектории БПЛА, или при прохождении через j-й рубеж охраны для случая, когда неизвестно направление траектории БПЛА;
 - вероятность наступления события, когда БПЛА нейтрализуется j-м часовым после обнаружения (j-1)-м часовым для случая, когда известно направление траектории БПЛА, или нейтрализуется при прохождении через j-й рубеж охраны после обнаружения на (j-1)-м рубеже охраны для случая, когда неизвестно направление траектории БПЛА.
- вероятность наступления события, когда БПЛА нейтрализуется j-м часовым после обнаружения (j-1)-м часовым для случая, когда известно направление траектории БПЛА, или нейтрализуется при прохождении через j-й рубеж охраны после обнаружения на (j-1)-м рубеже охраны для случая, когда неизвестно направление траектории БПЛА.
2. Способ по п. 1, отличающийся тем, что значение предельной дальности визуального обнаружения БПЛА, используемое для построения области пространства с центральным углом в горизонтальной плоскости, равным 360°, в границах которой вероятность обнаружения Робн.j БПЛА часовым будет равна 0,19, определяют с помощью системы уравнений
где ε - порог контрастной чувствительности зрения;
SM - метеорологическая дальность видимости;
K0 - контраст объекта при отсутствии дымки;
D - максимальный линейный размер предмета;
Lкр - критическое расстояние от часового до БПЛА, определяемое угловыми размерами в 15'.
3. Способ по п. 1, отличающийся тем, что вероятность поражения БПЛА часовым при условии хотя бы одного попадания очередью выстрелов с учетом уровня индивидуальной подготовленности часовых в СФЗ, габаритных размеров и скорости перемещения БПЛА определяют по формуле академика А.Н. Колмогорова

2а, 2b - стороны эквивалентного прямоугольника;
 - смещения центра рассеивания относительно центра цели по высоте и в боковом направлении;
- смещения центра рассеивания относительно центра цели по высоте и в боковом направлении;
Evу, Evz - предельные суммарные срединные ошибки выстрела, для определения которых используют таблицы стрельбы для конкретных образцов оружия;
ε(t) - специальная функция параметра t;
n - количество выстрелов в автоматической очереди;
 - постоянная величина, равная 0,0724, где ρ=0,4769 - постоянная нормального закона.
- постоянная величина, равная 0,0724, где ρ=0,4769 - постоянная нормального закона.
4. Способ по п. 1, отличающийся тем, что вероятность поражения БПЛА k-м часовым несколькими очередями, когда известна траектория БПЛА, определяют по формуле

где q - количество очередей;
Wn 1, Wn 2, Wn k - вероятность поражения цели первой, второй и т.д. очередями;
s1, s2, si - количество очередей с одинаковыми значениями вероятностей поражения Wn 1, Wn 2,
Wn k соответственно.
5. Способ по п. 1, отличающийся тем, что вероятность пресечения j-м часовым акции, реализуемой с помощью малоразмерного БПЛА, в случае, если его траектория неизвестна, определяется как в п. 4 формулы изобретения для секущей плоскости, построенной через точку SM, лежащую на расстоянии от часового до цели, соответствующем значению WM, равному среднему значению функции ƒ(Sнeйтp.), полученной в результате интерполяции дискретных значений вероятности поражения цели и соответствующих им значений расстояния от часового до цели при заданных начальных условиях, по формуле
| US 2008114708 A1, 15.05.2008 | |||
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "КУСОЧКИ ЩУКИ В ЗЕЛЕНОМ СОУСЕ" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ | 2006 |
|
RU2319421C1 |

