Способ обеспечения возможности езды на роликовых коньках с одним роликом и устройство для его реализации. Устройство, построенное в соответствии с предлагаемым способом удержания равновесия это, по сути, одно-роликовые коньки с интеллектуальным приводом. По уровню техники такое изделие будет содержать высокую долю программно-аппаратного продукта, а современные программно-аппаратные средства способны преобразовать старую привычную вещь в совершенно новый продукт, который оказывается востребованным на рынке.
Изобретение относится к области изделий широкого потребления и может быть использовано как спортивный инвентарь для активного отдыха и занятий спортом и фитнесом.
В соответствии с патентной формулой способ обеспечения возможности езды на роликовых коньках с одним роликом заключается в том, что ролику придается значительный осевой момент инерции, который препятствует быстрому выкатыванию нагруженного тяжестью конькобежца ролика из-под центра тяжести тела. Этот момент инерции создает для роллера виртуальную опору в курсовом направлении и позволяет сохранять равновесие и выполнять необходимые для езды маневры.
Легкий ролик имеет очень небольшой естественный осевой момент инерции. Поэтому по предлагаемому способу необходимый осевой момент инерции создается искусственно с помощью активного привода, встроенного в ролик конька. Такой активный привод может быть реализован, например, на двигателе, в котором токи через обмотки взаимодействуют с постоянными магнитами. При этом создается усилие, противодействующее быстрому изменению угловой скорости ролика.
Такой активный привод управляется процессором по описанному в настоящей заявке алгоритму. Так при ускорении ролика вперед процессор дает команду на торможение привода. Т.е. ЭДС, возникающая в обмотках двигателя при движении в поле постоянных магнитов через открытые по команде процессора ключи, вызывает в обмотках ток, тормозящий вращение ролика. При этом кинетическая энергия движения конькобежца запасается в аккумуляторе или конденсаторе.
При замедлении ролика, напротив, процессор дает команду на ускорение привода. Т.е. через обмотки двигателя пропускаются токи в противоположном направлении, в результате чего создается усилие, противодействующее резкому замедлению ролика. При этом расходуется, в том числе, и запасенная ранее энергия. Поскольку процессор реагирует мгновенно, создается эффект искусственного осевого момента инерции ролика (как будто бы ролик изготовлен из массивного металлического диска).
Процессор в своих вычислениях использует информацию об изменении угловой скорости ролика. Такую информацию можно получить, анализируя ЭДС, возникающую на катушках или с помощью специального датчика, что описано в аппаратной части формулы. При ускорении ролика период поступающих импульсов сокращается, при замедлении ролика импульсы приходят реже. Также об изменении угловой скорости ролика можно судить по крутизне фронтов или по величине амплитуды импульсов.
Для полноценной и комфортной езды на таких коньках способ предусматривает еще и такое условие. После отрыва ролика от поверхности качения угловая скорость его не сохраняется. Фиксируется и стабилизируется новая угловая скорость, полученная роликом в момент соприкосновения его с поверхностью качения. Что это дает. Роллер может, например, оттолкнуться от равномерно движущейся опорной ноги под углом к направлению движения и перенести вес тела на другую ногу. При этом тело приобретает дополнительный импульс, а скорость движения увеличивается (так называемый, коньковый ход). Именно эта возросшая скорость будет зафиксирована процессором. Или возможно подпрыгнуть, развернуться на 180 градусов и продолжить движение в том же направлении задом. Можно использовать такую методику. Предварительно отклонившись назад, оторвать правую ногу от поверхности и коснуться ею асфальта, одновременно сдвигая ее назад и перенося на нее тяжесть тела. Левая нога при этом отрывается от опоры. Процессор будет поддерживать заданную вами меньшую скорость, тело пойдет вперед, компенсируя первоначальное отклонение. Энергия от этого замедления будет запасена в конденсаторе или аккумуляторе. Совершая этот маневр попеременно левой и правой ногами в достаточно быстром темпе можно эффективно сбросить скорость, не прибегая к экстренному торможению. Обратный процесс с наклоном вперед позволит разгоняться за счет аккумулятора, не утруждая себя необходимостью отталкиваться от опорной ноги.
Информацию об отрыве конька от поверхности качения процессор может получить, например, от датчика давления, располагающегося на конструкции конька. Поднимая ногу, конькобежец разгружает конек и сенсор давления или контактный микровыключатель, расположенный, например, под стелькой ботинка информирует процессор об этом событии.
Кроме функции подержания постоянства угловой скорости в целях сохранения равновесия процессор управляет разгоном и торможением конькобежца. Имеется в виду, прежде всего, экстренное торможение, инициируемое через задающее устройство, описываемое в аппаратной части формулы. Если аккумулятор имеет достаточную емкость, возможно реализовать также пассивное равномерное движение роллера или режим ускорения.
Далее идет описание работы устройства по приведенным рисункам, (фиг. 1 - фиг. 3)
1 - роликовый конек
2 - привод
3 - ролик
4 - ботинок
5 - корпус
6 - подшипник
7 - постоянный магнит
8 - обмотка
9 - зубчатая передача
10 - датчик давления
11 - датчик угла поворота
12 - силовая схема
13 - микропроцессор
14 - задающее устройство
15 - накопительный конденсатор
16 - аккумулятор
17 - блок управления
Устройство, позволяющее реализовать способ обеспечения возможности езды на роликовых коньках с одним роликом, состоит из двух роликовых коньков (1) и связанного с ними блока управления (17). Коньки с блоком связаны жгутом, через который осуществляется обмен информацией и энергетические воздействия.
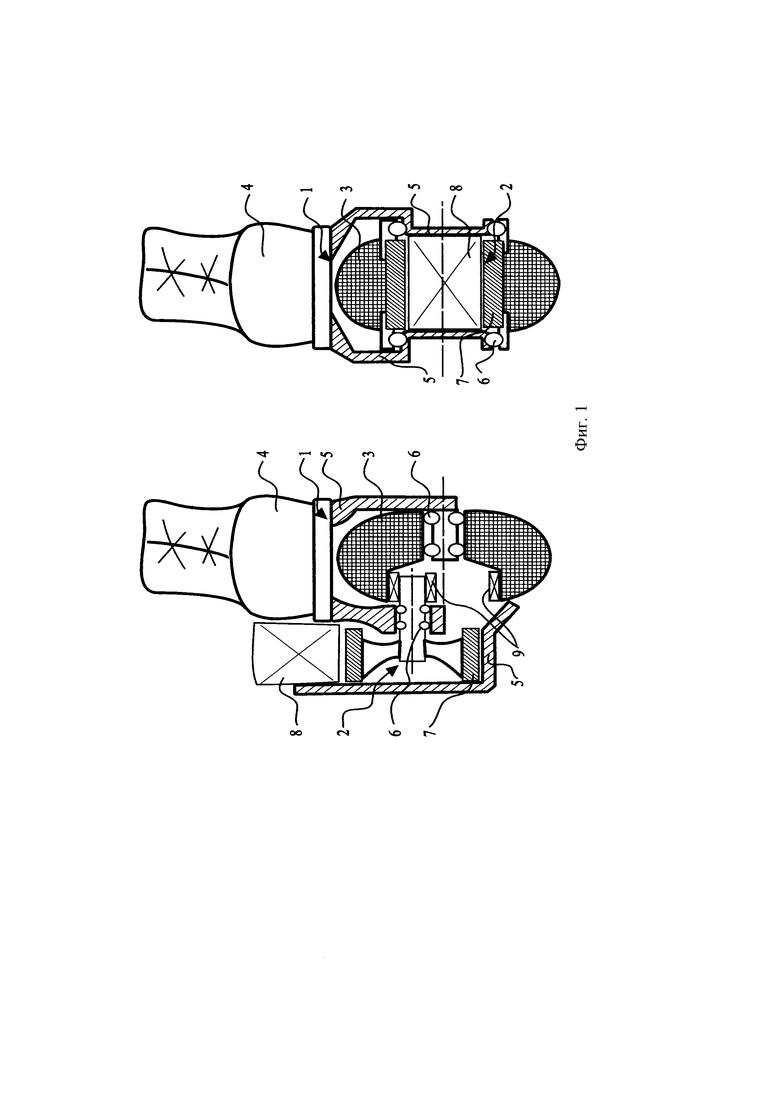
Как видно из рисунка, роликовые коньки необычные, - на ботинках в раме закреплено всего по одному ролику (3). Непосредственно в ролик (3) - фиг. 1 справа или через зубчатую передачу (9) фиг. 1 слева встраивается активный привод (2). Привод представляет собой комбинацию из обмоток (8) (катушек), расположенных на неподвижной части конструкции и постоянных магнитов (7) на подвижной части конструкции. При повороте ролика в обмотках наводится ЭДС и, если цепь обмотки замкнута, через нее течет ток, поле которого взаимодействует с полем постоянных магнитов. Манипулируя величиной и направлением тока через обмотки можно затормаживать или ускорять ролик в соответствии с алгоритмом работы.
Кроме того, в корпус (5) роликового конька (!) встроен датчик угла поворота (ГГ), передающий информацию микропроцессору (13) о текущей угловой скорости ролика (3) и датчик давления (10), передающий информацию процессору (13) о текущем уровне давления на ролик (4). Именно этой информацией процессор руководствуется в своих вычислениях.
Активный привод (2) приводился в действие от силовой схемы (12). Эта схема манипулирует токами в обмотках (регулирует, коммутирует, усиливает), запасает энергию в накопительном конденсаторе (15) при затормаживании ролика.
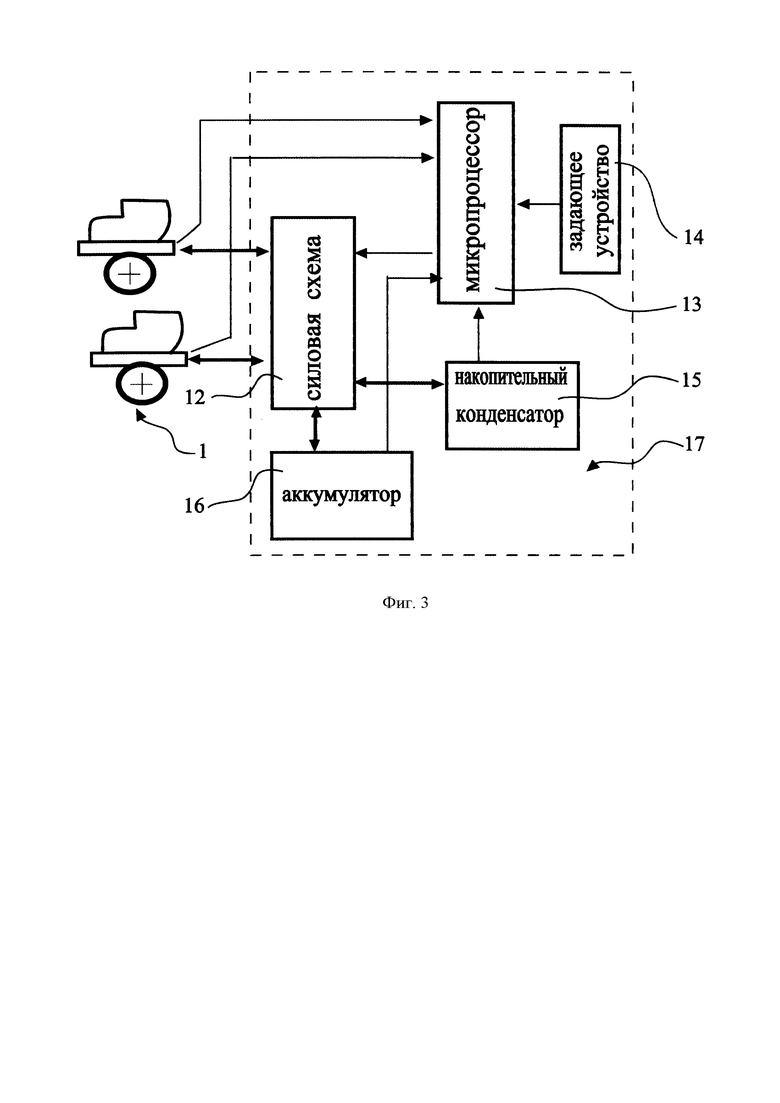
Силовая схема (12) управляется от микропроцессора (13), а энергию получает от накопительного конденсатора (15) и аккумулятора (16). Микропроцессор (13) запрограммирован по алгоритму, реализующему заявляемый способ.
Как видно из рисунка фиг. 3, по входам микропроцессор (13), получает информацию от датчика угла поворота (11), от датчика давления (10), задающего устройства (14), от накопительного конденсатора (15) и аккумулятора (16). Связь с накопительным конденсатором и аккумулятором позволяет процессору с помощью силовой схемы постоянно поддерживать на конденсаторе постоянный средней величины заряд, а при возможности подзаряжать аккумулятор. Накопительный конденсатор (15) имеет большую емкость, что позволяет оперативно обменивать кинетическую энергию движения роллера на электрическую энергию заряда конденсатора, а также осуществлять обратный процесс.
Задающее устройство (14)) позволяет вводить режим управления активным приводом (2), а именно уровень создаваемого осевого момента инерции, чувствительность датчика давления (10) и управлять режимом экстренного торможения. В зависимости от режима катания (прогулочный, тренировочный, экстремальный), в зависимости от опыта и навыков спортсмена через задающее устройство можно вводить уровень осевого момента инерции, т.е. величину сопротивления ролика к его ускорению или замедлению. При подаче команды на экстренное торможение кинетическая энергия движения спортсмена переводится в дополнительный заряд конденсатора, т.е. реализуется режим рекуперации.
Оперативное управление задающим устройством (14) может быть вынесено на ручной пульт или осуществляться через голосовой канал. В этом случае добавляется соответствующее аппаратное устройство - кнопочный пульт или ларингофонная приставка.
Рассмотрим более подробно идеологию заявки. Роликовые коньки по своим потребительским качествам хуже традиционных (ледяных) коньков потому, что тормозят на криволинейной траектории. А можно их сделать лучше традиционных, достаточно поставить на ботинок всего один ролик. Но при этом возникает неудобство, - при малейшем отклонении точки касания роликом опоры от проекции центра тяжести возникает выталкивающая сила и конек стремительно выкатывается из-под конькобежца. Предлагаемый способ позволяет устранить этот недостаток. Как удержать равновесие на коньке с одним роликом? Нужно увеличить осевой момент инерции ролика. Представим себе вместо ролика массивный металлический вал. Чтобы раскрутить такой вал, нужно приложить значительную силу в течение довольно длительного времени. И наоборот, такой ролик-вал будет продолжать крутиться при тормозящем усилии, продвигая конек вперед. Удержание равновесия с такими роликами, если, конечно, абстрагироваться от их большого веса, не составит труда. Однако можно создать искусственный осевой момент инерции с помощью активного силового привода, вмонтированного в ролик конька. При попытке ролика ускориться силовой привод тормозит это ускорение, а возникающая при этом энергия запасается в конденсаторе. При замедлении ролика энергия конденсатора подается на силовой привод и ролик подталкивается вперед. Возникает полная аналогия большого осевого момента инерции ролика.
Другой важный принцип, заложенный в интеллектуальные коньки состоит в том, что при касании ролика конька опоры, он принимает и начинает сохранять ту скорость, которая была в момент касания. Это позволяет спортсмену и разгоняться и тормозить. Отталкиваясь одной ногой и перенося тяжесть на другую мы изменяем скорость движения. Кроме того, интеллектуальный привод позволяет запасать энергию при торможении и возвращать ее при разгоне. Это облегчает катание и делает его более легким и увлекательным. Аккумулятор дает дополнительные возможности для длительных прогулок.
Искусственный осевой момент инерции имеет преимущество перед естественным: - его можно при необходимости регулировать или отключать. Если мы оторвали конек от земли и, шагнув, вновь коснулись поверхности уже с другой скоростью, ролик не противодействует, а принимает эту новую скорость и стабилизирует ее значительным осевым моментом инерции. Это дает новые тактические возможности роллеру. Можно, например, подпрыгнуть, развернуться на сто восемьдесят градусов и катиться дальше в том же направлении задом.
Силовой привод ролика осуществляется от силовой схемы, управляемой процессором. Если в конструкцию роликового конька встроить датчик давления, то информацию от этого датчика можно использовать для оперативного изменения величины и направления осевого момента инерции. Другой встроенный датчик анализирует скорость углового вращения ролика. Процессор, анализируя информацию этого датчика, с высокой точностью определяет ускорение или замедление ролика и дает команду на силовую схему, которая либо тормозит, либо ускоряет ролик.
Роль накопителя энергии играет конденсатор, емкость которого выбирается из возможности запасти кинетическую энергию роллера при экстренном его торможении. Так человек массой 80 кг, который движется со скоростью 10 километров в час, обладает кинетической энергией около 300 джоулей. V=10/3.6=2.78 m/c
W=m*V*V/2=80*2.78*2.78/2=309 джоулей.
В то же время современный электролитический конденсатор (например, EPCOSB 4345 С=12000 mkF U=450 V, масса 1.9 kG) может запасти энергию в 1200 джоулей.
W=C*U*U/2=12000*450*450/2000000=1215 джоулей, что заведомо превышает нужную величину, (где m - масса, V - скорость, W - энергия, U - напряжение, С - емкость в единицах СИ).
Все оперативные маневры роллера выполняются практически без потери энергии, - она запасается и вновь возвращается через конденсатор. При этом происходит кратковременный обмен значительными энергиями. Для упрощения и нормализации режимами управления параллельно конденсатору через соответствующую схему подключается аккумулятор небольшой емкости, который поддерживает некоторый средний уровень заряда конденсатора. Аккумулятор рассчитан на небольшой ток и может как разряжаться, так и постепенно заряжаться. Если использовать аккумулятор значительной емкости, человек может без затраты особых усилий передвигаться на значительное расстояние, т.е. использовать роликовые коньки, как транспортное средство.
В зависимости от величины осевого момента инерции, который можно выбирать на пульте процессора, роллер может использовать разную тактику катания. При большом значении осевого момента инерции человек может спокойно пройти из раздевалки, спуститься по лестнице, пройти шагом по дорожке. Привод сохраняет почти нулевую скорость ролика, который служит достаточно надежной опорой.
При желании начать движение роллер отталкивается, допустим, правой ногой от дорожки и выдвигает левую ногу вперед. При этом запоминается и стабилизируется скорость левой ноги в момент ее касания дорожки. Роллер переносит тяжесть тела на левую ногу, отклоняясь при этом корпусом вперед. Далее он отталкивается уже левой ногой, отрывая правую от дорожки. Набрав необходимую скорость, он только сохраняет курсовое и боковое равновесие. По такой же методике можно замедлять скорость движения. При экстренном торможении роллер отклоняется назад и включает на ручном пульте или через голосовой канал соответствующую команду.
При катании с малым осевым моментом инерции от роллера требуется большее мастерство и опыт. Но и возможностей он получает гораздо больше. Становятся возможными легкие развороты с перегрузками и набором скорости на виражах, смены направления и прыжки из поворота, разгона «по змейке», движения по малому кругу вперед или назад. Промежуточное запасание и возврат энергии, а также малые потери в подшипнике сделают катание на однороликовых коньках не менее привлекательным, чем на традиционных, ледяных. Решающее значение для комфортной езды имеет качество программирования контроллера, выбор наиболее удачного алгоритма программы.
Можно привести примеры ряда устройств, передвигающихся на одном колесе. Например, одноколесный велосипед - моноцикл. На нем эквилибрист, поворачивая педали вперед или назад, перемещает точку опоры колеса относительно проекции центра тяжести на поверхность опоры таким образом, чтобы сохранять равновесие. При определенном навыке это доступно почти любому человеку, - в цирковом училище этот предмет является обязательным зачетом. Аналогично достигается езда на одном заднем колесе современного мотоцикла, где ручка газа очень чувствительно воздействует на обороты двигателя. Некоторые транспортные средства снабжают устройством, автоматически реализующим баланс поддержания курсового равновесия. Это такие устройства, как Segway, Segwheel, Honda U3-X, Enicycle, Toyota Winglet.
Здесь отолитовый аппарат человека заменяется датчиками ориентации в пространстве (в Сегвее это гироскопические и жидкостные датчики наклона, в других аппаратах -двухосевые и трехосевые акселерометры). Датчики по обратной связи через микропроцессор воздействуют на привод колеса и автоматически корректируют положение точки опоры колеса относительно проекции центра тяжести на опорную плоскость.
Такие транспортные средства используют легкие и мощные бесколлекторные сервомоторы с неодимовыми магнитами. Если проанализировать все эти устройства, можно заметить, что они работают на одном принципе. Один или несколько датчиков-гироскопов отслеживают вертикальность корпуса транспортного средства. При отклонении корпуса от вертикали процессор отдает команду активному приводу на компенсацию этого отклонения. Так сохраняется равновесие. То есть все эти устройства имеют корпус, который пытаются поддерживать в вертикальном положении.
У роликового конька нет тележки - корпуса, ботинок конька меняет свой наклон из разных соображений роллера и реакции процессора на такие наклоны не будут адекватными замыслу спортсмена, к тому же конька ведь два. Размещать гироскоп на корпусе роллера тоже не эффективно, - такая система имела бы мало общего с катанием на коньках. Поэтому заявке на патент используется другой принцип поддержания равновесия. Стабилизируется угловая скорость ролика, причем та скорость, которую ролик получает в момент своего соприкосновения с поверхностью опоры. Это дает не только надежную опору роллеру, но и многочисленные возможности по тактике катания на роликовых коньках.
Суть дальнейших рассуждений легче понять человеку, имеющему собственный опыт катания на роликовых, а лучше на традиционных коньках по льду.
Режим для начинающих, простейшие движения. Момент инерции выставлен с помощью кнопок на корпусе прибора на максимум. Хождение шагом, можно спуститься по лестнице. При начале движения человек разгружает левую ногу, отводит правую назад, перемещаясь при этом вперед и переносит тяжесть на левую ногу. Привод левого ролика сохраняет полученную при касании земли скорость. Теперь отрывается правая нога, а левой человек отталкивается, увеличивая скорость еще больше. Набрав скорость, можно двигаться равномерно, удерживая равновесие за счет искусственной инерционности роликов.
Коньковый ход. И вперед и назад. Наиболее мощный разгон спортсмен получает при работе коньковым ходом. Здесь также удобнее пользоваться большим моментом инерции. Опираясь на движущуюся по наклонной линии правую ногу, спортсмен сильно от нее отталкивается и переносит тяжесть на другую ногу. При этом скорость, с которой левый конек встречается с асфальтом, становится больше. То же при движении задним ходом.
Работа на кривых. Наклоны и изменение радиуса кривизны. Движение по синусоиде. В этом режиме максимально проявляется достоинства одно-роликовой конструкции. Появляется свобода маневра и легкость управления траекторией движения, аналогичные катанию на льду. Варьируя радиус кривизны траектории, можно набирать или гасить скорость, выполнять элементы фигурного катания. Доступны крутые развороты и прыжки с изменением направления движения. В этом режиме полезно уменьшить искусственный момент осевой инерции. Интеллектуальный привод без труда решает вопросы экстренного торможения, пассивного разгона и длительной езды на аккумуляторе. Новые роликовые коньки обещают стать выгодным и хорошо продаваемым товаром. Далее идет описание работы устройства по приведенным рисункам.
На фиг. 1 показаны два варианта компоновки устройства. В ролик (3) роликового конька (1) встроен активный привод (2). Он может располагаться непосредственно в корпусе ролика (рисунок справа), либо активный привод выносится в сторону, (рисунок слева). В этом случае вращение от привода передается через зубчатую передачу (9). Это позволяет уменьшить диаметр ролика и снизить требования к пусковому моменту и мощности силового привода. На роторе силового привода (2) располагаются мощные постоянные магниты (7), а в статоре размещены обмотки (8).
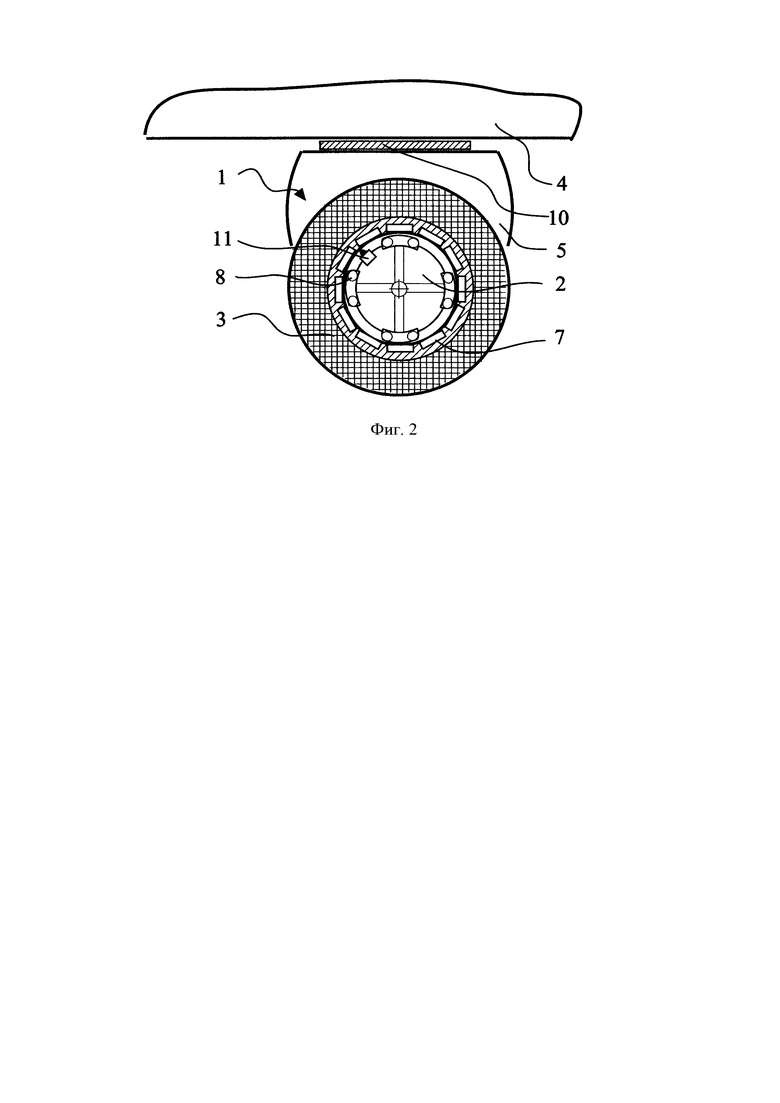
На фиг. 2 показан тот же роликовый конек 1, вид сбоку. На разрезе видны видны постоянные магниты ротора (7) и обмотки статора (8). Кроме того, показан датчик углового перемещения (11). Контроллер на основании информации с этого датчика вычисляет скорость изменения угла поворота ролика, а значит, определяет скорость его ускорения или замедления. В корпус роликового конька встроен также датчик давления (10). Это аналоговый датчик, он дает информацию для процессора о степени опоры роллером в данный момент на конек.
Роликовые коньки (1) связаны проводами с блоком управления (17), смотри фиг. 3. Блок управления находится на поясе роллера. Микропроцессор (13) на основании получаемой информации и в соответствии с заложенным алгоритмом управляет силовой схемой (12). Жирными линиями показаны сильноточные связи. Кроме накопительного конденсатора (15) и аккумулятора (16) на блок-схеме показано задающее устройство (14). С этого устройства может быть задан режим тренировки, в частности уровень осевого момента инерции. Кроме того, задающее устройство (14) может иметь продолжение в виде выносного ручного пульта или микрофона голосового управления. Эти устройства также обеспечивают режим экстренного торможения роллера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обеспечения возможности езды на роликовых коньках с одним роликом | 2016 |
|
RU2667223C2 |
| Устройство роликовых коньков с одним роликом | 2018 |
|
RU2686731C1 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2005 |
|
RU2295992C2 |
| РОЛИКОВЫЕ КОНЬКИ | 2003 |
|
RU2252809C2 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2004 |
|
RU2301100C2 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2004 |
|
RU2318572C2 |
| РОЛИКОВЫЕ КОНЬКИ ГАДИЕВА | 2008 |
|
RU2381050C2 |
| СПОСОБ СПУСКА С НАКЛОННЫХ ПОВЕРХНОСТЕЙ (ВАРИАНТЫ) | 2010 |
|
RU2419476C1 |
| Способ передвижения по пересеченной местности и устройство для его реализации | 2017 |
|
RU2675742C1 |
| РОЛИК ДЛЯ КАТАНИЯ | 2006 |
|
RU2311939C1 |
Способ обеспечения возможности езды на роликовых коньках с одним роликом. Патент позволяет построить имеющие всего по одному ролику на ботинке роликовые коньки с интеллектуальным силовым приводом. Способ удержания равновесия на таких коньках предполагает создание в каждом ролике искусственного осевого момента инерции, который противодействует быстрому изменению скорости ролика. Такой момент позволяет роллеру избежать самопроизвольного выкатывания конька из-под центра тяжести тела. Конькобежец получает опору и возможность обеспечения курсового равновесия. Другой особенностью способа является возможность поддержания новой скорости ролика, которую он получает при следующем касании асфальта. Это позволяет быстро набирать и гасить скорость и использовать привычные приемы катания на традиционных «ледяных» коньках. Система предусматривает рекуперацию энергии при маневрах роллера, это реализуется при использовании процессора, специальной силовой схемы, накопительного конденсатора и аккумулятора. Одно-роликовая конструкция позволяет устранить главный недостаток роликовых коньков, - их торможение на криволинейной траектории и приблизить ощущения при их эксплуатации к катанию на фигурных коньках по льду. Формула на способ и устройство для его реализации содержит 19 пунктов. Изобретение относится к области изделий широкого потребления и может быть использовано как спортивный инвентарь для активного отдыха и занятий фитнесом. Изделие высокотехнологично, использует большую долю программно-аппаратного продукта, предполагается значительный интерес к девайсу на мировом рынке. 6 з.п. ф-лы, 3 ил.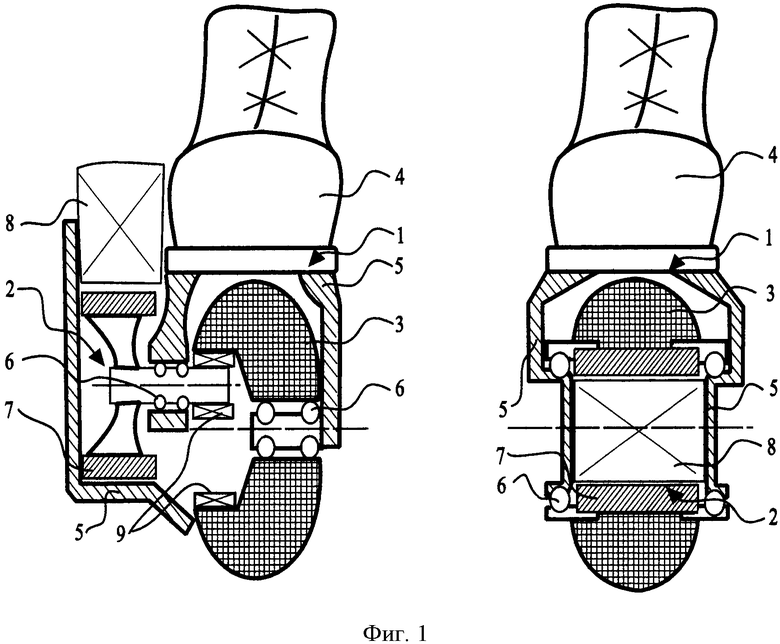
1. Способ обеспечения возможности езды на роликовых коньках с одним роликом, характеризующийся тем, что ролику придается значительный осевой момент инерции, который препятствует быстрому выкатыванию ролика из-под центра тяжести тела, нагруженного тяжестью конькобежца, отличающийся тем, что осевой момент инерции создается искусственно с помощью активного привода, встроенного в ролик конька, и этот активный привод управляется процессором по определенному алгоритму.
2. Способ по п. 1, отличающийся тем, что при ускорении ролика вперед процессор дает команду на торможение привода, при этом кинетическая энергия движения конькобежца запасается в аккумуляторе или конденсаторе.
3. Способ по п. 1, отличающийся тем, что при замедлении ролика процессор дает команду на ускорение привода, при этом расходуется, в том числе, и запасенная ранее энергия.
4. Способ по п. 1, отличающийся тем, что процессор в своих вычислениях использует информацию об изменении угловой скорости ролика.
5. Способ по п. 1, отличающийся тем, что после отрыва ролика от поверхности качения угловая скорость его не сохраняется, фиксируется и стабилизируется новая угловая скорость, полученная роликом в момент соприкосновения его с поверхностью качения.
6. Способ по п. 1, отличающийся тем, что информацию об отрыве конька от поверхности качения процессор получает от датчика давления, располагающегося на конструкции конька.
7. Способ по п. 1, отличающийся тем, что, кроме функции поддержания постоянства угловой скорости в целях сохранения равновесия, процессор управляет разгоном и торможением конькобежца.
| US 4108451 A1, 22.08.1978 | |||
| US 5106110 A, 21.04.1992 | |||
| РОЛИКОВЫЕ КОНЬКИ | 1990 |
|
RU2067481C1 |
| US 6059062 A, 09.05.2000 | |||
| KR 101218594 B1, 07.01.2013. | |||

