Способ передвижения по пересеченной местности отличающийся тем, что перемещение аппарата осуществляется отдельными или непрерывно следующими друг за другом прыжками. В отличии от квадроциклов, снегоходов и других внедорожников, прокладывающих по местности непрерывную колею, по заявляемому способу движение осуществляется прыжками, от точки к точке.
Способ отличается тем, что аппарат подбрасывается с помощью двух приводных пневматических цилиндров. Цилиндры, расположенные по сторонам аппарата обеспечивают ему стабильность во фронтальной плоскости (b) (смотри рисунок), в то же время позволяют выбирать необходимый угол для прыжка в вертикальной курсовой плоскости (с). При подаче сжатого воздуха в цилиндры поршни выталкивают аппарат в выбранном направлении и остаются в выдвинутом положении в течении всего времени полета.
Способ отличается тем, что энергия, затрачиваемая на подбрасывание аппарата в основном возвращается при его приземлении. При касании земли поршни силой инерции аппарата вдвигаются обратно в поршни, равномерно гася скорость аппарата. При этом сжатый воздух возвращается обратно в ресивер. Незначительные потери компенсируются работающим компрессором.
Способ отличается тем, что ориентация и стабилизация аппарата в пространстве осуществляется с помощью гиродина - маховика с приводом. После того, как аппарат вытолкнут приводными пневматическими цилиндрами вверх и вперед (назад), его необходимо за время полета развернуть навстречу приближающейся земле. Это можно сделать, изменяя скорость вращения маховика. Аппарат в полете является свободной системой и по законам механики он должен сохранять свой момент импульса (количество вращательного движения). Когда привод прикладывает вращающий момент к маховику, тот начинает раскручиваться. Одновременно момент сил той же величины, но противоположного направления прикладывается к корпусу аппарата относительно той же оси, вокруг которой вращается маховик. Корпус начинает медленно поворачиваться, постепенно ускоряясь. Если теперь привод отключить от источника энергии, маховик будет вращаться равномерно, а корпус аппарата будет также равномерно поворачиваться в пространстве. Чтобы его остановить, привод должен воздействовать на маховик в обратном направлении. Так работают гиродины на спутниках в космосе, они часто управляют ориентацией по трем пространственным осям. В данном случае нужен мощный одноосевой гиродин, способный энергично развернуть пятисот килограммовый аппарат в нужном направлении.
Способ отличается тем, что ось маховика расположена горизонтально и перпендикулярно направлению движения, а главной функцией гиродина является разворачивание аппарата в вертикальной курсовой плоскости в процессе выполнения прыжка. Как видно из рисунка ось маховика расположена во фронтальной плоскости (b) параллельно земле, а сам маховик вращается в вертикальной курсовой плоскости (с). Когда готовый к работе аппарат стоит на опорных площадках, его равновесие поддерживается попеременным закручиванием маховика в ту или обратную сторону. Так, когда корпус начинает заваливаться вперед, маховик также закручивается вперед, аппарат отклоняется назад, переходя положение равновесия. При необходимости совершить прыжок вперед маховик получает от привода резкий кинетический момент назад, корпус отклоняется вперед на нужный угол, подается сжатый воздух в цилиндры, аппарат подпрыгивает. Сразу после отрыва от земли необходимо совершить противоположный маневр (кинетический момент вперед), чтобы развернуть аппарат навстречу точки приземления. Если совершается единичный прыжок, то инерции последней закрутки корпуса аппарата достаточно, чтобы остановиться на опорных площадках вблизи точки равновесия. Если предполагается непрерывное движение вперед прыжками, то в момент касания опорами земли гиродин снова отрабатывает назад и к моменту полного гашения аппаратом вертикальной составляющей скорости, он оказывает повернутым вперед для следующего прыжка.
Способ отличается тем, что поворот аппарата по курсу осуществляется силами прецессии маховика, для возникновения которых в приводных пневматических цилиндрах целенаправленно создается разница в давлении. Пока аппарат перемещается прыжками вперед курс его движения остается постоянным. Для поворота, например, вправо нужно, чтобы при очередном приземлении левая опора приземлилась немного дальше, чем правая, тогда следующий прыжок будет выполнен с изменением курса. Для этого аппарат в воздухе необходимо немного развернуть вправо. Использовать для этого второй гиродин нецелесообразно. Настоящий способ предлагает задействовать силу прецессии уже имеющегося маховика, которая возникнет при попытке повернуть корпус аппарата во фронтальной плоскости (b). Если создать при прыжке в левом цилиндре несколько большее давление, чем в правом, то в момент прыжка к аппарату будет приложен момент вращения по часовой стрелке. Воздействуя на вращающейся маховик, этот момент по законам прецессии вызовет момент, разворачивающий корпус аппарата вправо. Так велосипед, переднее колесо которого ведет себя как маховик, самопроизвольно поворачивает руль в сторону наклона корпуса.
Способ отличается тем, что процесс выполнения прыжка полностью автоматизируется за счет того, что управление гиродином и приводными цилиндрами осуществляется контроллером в соответствии с заданным алгоритмом. Процесс управления аппаратом динамичен, а результатом ошибки при ручном управлении является падение, поэтому передача рутинных операций по контролю за параметрами, состоянием оборудования, а также само воздействие на него целесообразно передать контроллеру.
Способ отличается тем, что алгоритм работы контроллера учитывает задаваемый оператором режим движения, результат взаимодействия опорных площадок с грунтом при отталкивании и приземлении аппарата и другие случайные воздействия на аппарат. Оператор выбирает режим движения: одиночный прыжок или непрерывное перемещение прыжками, скорость перемещения или соответственно угол, под которым совершаются прыжки, силу отталкивания и соответственно высоту прыжков, также определяющую скорость перемещения, направление поворота или курс, которым перемещается аппарат. На пересеченной местности грунт имеет ограниченную несущую способность, при резком отталкивании тяжелого аппарата от поверхности земли часть энергии, предназначенной для подбрасывания аппарата, теряется на уплотнение грунта. Это приводит к изменению угла отрыва и снижению высоты подъема аппарата, эти случайные помехи также должен учитывать и компенсировать контроллер через воздействия на исполнительные органы.
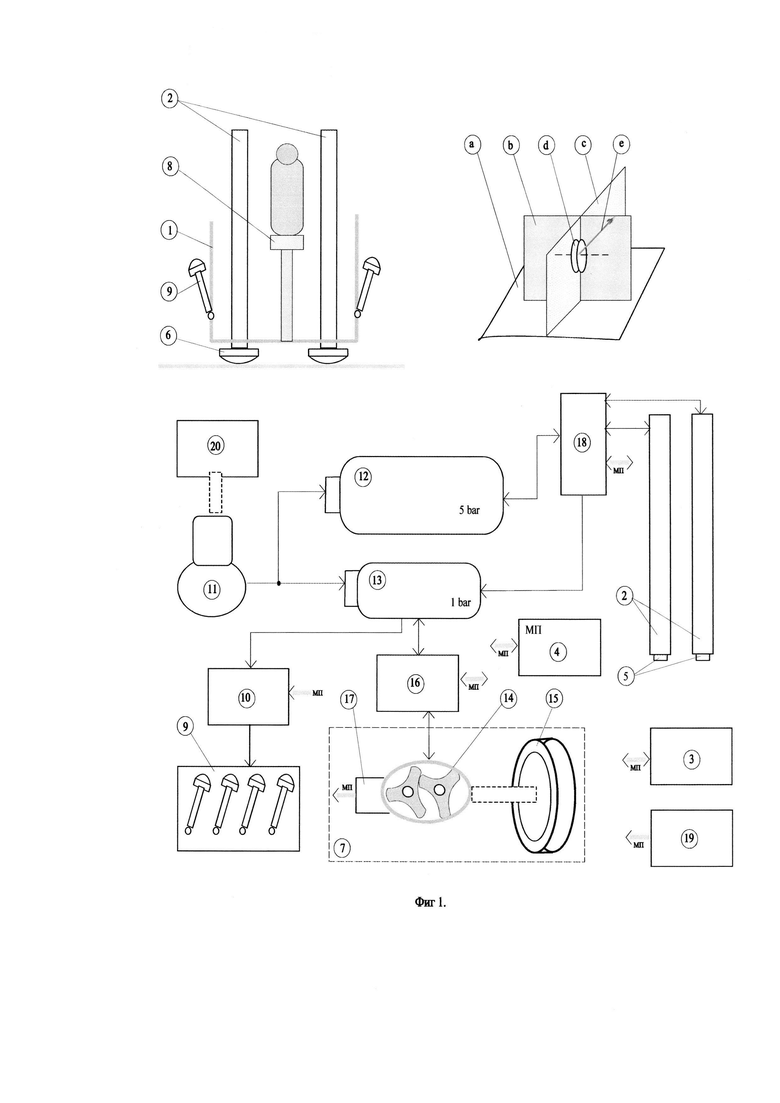
Описывается один из вариантов устройства, позволяющего реализовать способ передвижения по пересеченной местности. Устройство, схема которого показана на фиг. 1, состоит из корпуса (1) с жестко закрепленными на нем приводными пневматическими цилиндрами (2). Корпус (1) выполнен в виде корзины, в которой располагается оператор, его багаж и все необходимое оборудование аппарата. При совершении прыжка усилие на корпус передается через эти два цилиндра (2), жестко закрепленные по сторонам корпуса.
Устройство по п. 9, отличающееся тем, что приводные пневматические цилиндры (2) присоединен к ресиверам высокого (12) и низкого (13) давления через регулирующую арматуру (18). Регулирующая арматура (18) включает в себя электрически управляемый клапан подачи сжатого воздуха. При открытии клапана воздух поступает из ресивера высокого давления (12) в цилиндры (2), поршни (5) выталкиваются и аппарат совершает прыжок. Клапан имеет управляемую пропускную способность, поэтому давление в цилиндрах (2) может варьироваться в зависимости от заданной оператором высоты прыжков. При приземлении аппарата поршни (5) силой инерции вдвигаются в цилиндры (2), давление воздуха повышается до давления в ресивере (12) и воздух через обратный клапан, входящий в состав регулирующей арматуры (18), возвращается в ресивер (12). При этом энергия, затраченная на подбрасывание аппарата, в основном возвращается, преобразуясь в энергию сжатого воздуха. Вследствие потерь, в частности на уплотнение грунта на площадках отталкивания, поршни (5) не доходят до конца, и в момент их остановки открывается второй обратный клапан, также входящий в состав регулирующей арматуры (18), и часть сжатого воздуха из цилиндров (2) перепускается в ресивер низкого давления (13).
Устройство по п. 9, отличающееся тем, что поршни (5) приводного пневматического цилиндра (2) заканчиваются опорными площадками (6), на которые опирается аппарат при работающем гиродине (7). Опорные площадки имеют выпуклую форму и позволяют распределять значительную нагрузку на грунт, возникающую при прыжке аппарата.
Устройство по п. 9, отличающееся тем, что компрессор (11) присоединен к ресиверам высокого (12) и низкого (13) давления. Энергия, необходимая для перемещения аппарата запасается в двух ресиверах, сжатый воздух в которые подается от компрессора (11), приводимого от небольшого двигателя внутреннего сгорания (20). Мощность, затрачиваемая на привод компрессора и соответственно на движение аппарата невелика (2-5 кВт), в то время, как в момент прыжка поршни (5), отталкивающие аппарат от земли, развивают мощность в 20-30 раз большую, что возможно благодаря возврату большей части затрачиваемой энергии при приземлении аппарата. Двигатель внутреннего сгорания (20) лишь компенсирует возникающие потери энергии.
Устройство по п. 9, отличающееся тем, что гиродин (7), состоящий из механически связанных маховика (15) и кулачкового компрессора (14), присоединен к ресиверу низкого давления (13) через регулирующую арматуру кулачкового компрессора (16). Гиродин стабилизирует аппарат в воздухе и на стоянке в режиме готовности. Кроме того, он выполняет резкие и точные движения аппарата при подготовке прыжка, в процессе его выполнения и при приземлении. Гиродин (7) состоит из маховика (15), который связан валом с приводом, в качестве которого используется кулачковый компрессор (16). Кулачковый компрессор это обратимая машина, - при подаче на него сжатого воздуха он превращается в мощный и компактный двигатель, причем в зависимости от того, с какой стороны подается воздух, двигатель ускоряет вращение маховика в ту или другую сторону. Если маховик (15) уже вращается, а устройство подключено к ресиверу (13) со стороны замедления маховика, кулачковый компрессор (14) превращается именно в компрессор. На его выходе давление превышает давление в ресивере и он начинает закачивать наружный воздух в ресивер, превращая кинетическую энергию маховика в энергию сжатого воздуха, такая схема также работает на экономичность аппарата. Одной из особенностей кулачкового компрессора (14) является относительно низкое давление, на котором он работает (не более одного бара). Это обстоятельство обуславливает необходимость использования второго ресивера низкого давления (13). Все необходимые манипуляции по оперативному переключению воздуха выполняет арматура кулачкового компрессора (16) по командам контроллера (4).
Устройство по п. 9, отличающееся тем, что к ресиверу низкого давления (13) подключены пневматические привода (10) ножек (9), которые поддерживают аппарат при неработающем гиродине (7). Кроме удержания аппарата в неработающем состоянии опора на ножки (9) может потребоваться для «разгрузки» маховика, если его обороты превысят допустимые. Это может произойти в случае однонаправленных посторонних воздействий на корпус, тогда аппарат по команде контроллера на короткое время останавливается, опирается на ножки и снимает излишний момент вращения с маховика.
Устройство по п. 9, отличающееся тем, что контроллер (4) получает информацию с пульта управления (3), датчика ориентации и акселерометра (19), энкодера гиродина (17), регулирующей арматуры кулачкового компрессора (16), регулирующей арматуры приводных цилиндров (18), обрабатывает ее в соответствии с текущим алгоритмом и осуществляет управляющие воздействия на регулирующую арматуру приводных цилиндров (18), регулирующую арматуру кулачкового компрессора (16) и пневматический привод ножек (10). Все основные компоненты устройства связаны с контроллером, он получает информацию о состоянии подвижных элементов оборудования, значения давления в разных узлах устройства, о скорости вращения маховика через энкодер (17) и о положении в пространстве от датчика (19), в качестве которого используется микромеханический вибрационный гироскоп-акелерометр. Располагая необходимой информацией и руководствуясь командами оператора с пульта управления (3), контроллер в соответствии с алгоритмом работает с узлами всего устройства.
Существует несколько способов передвижения человека с неудобным для переноски грузом по относительно пересеченной местности, т.е. по территории без дорог или вне дорог. Самый старый и проверенный способ предусматривает использование верховых и вьючных животных, таких как лошади, верблюды, слоны. С появлением компактных двигателей внутреннего сгорания появились устройства, облегчающие такое перемещение. При движении колесного транспорта повышенной проходимости по пересеченной местности ему приходится прокладывать две непрерывные колеи. Это приводит к тому, что на почвах с ограниченной несущей способностью происходит разрушение поверхностного слоя, и возникают проблемы сцепления с грунтом, особенно на локальных подъемах, в заболоченных местах и при преодолении рытвин и канав.
Применение гусеничных движителей для легких транспортных средств оправдано только в зимний период (снегоходы), в другое время года легкие пластиковые конструкции не работают, забиваясь грязью и мусором. Металлические гусеницы тяжелы и превращают внедорожник в танк или БМП. Использование аппаратов на воздушной подушке, а также транспортных средств с аэродинамическим движителем не возможно, если на местности встречаются сколько-нибудь серьезные препятствия.
С развитием робототехники открылись новые возможности для создания аппаратов этого класса. Так в США проходит испытания четырехногий робот-мул. Аппарат умеет передвигаться по пересеченной местности, переносить почти 200 килограммов груза, самостоятельно идти за человеком, ложиться и вставать. В России (ВНИИ «Сигнал») также разрабатывается аналогичный робот военного применения - "Рысь".
Описываемый здесь аппарат также можно отнести к биоморфным конструкциям, заимствующим в соответствии с принципами бионики функции и структуры живой природы. В данном случае можно говорить об имитации кенгуру.
Высота, на которую можно подбросить аппарат и, соответственно, скорость, с которой он может перемещаться по курсу, зависят от длины выдвигаемого при прыжке цилиндра и от перегрузки, которую может длительное время выдерживать оператор. Для оценки возможностей такого аппарата рассмотрим числовой пример.
Пусть длина выдвигаемой «ноги» - поршни (5) на рисунке будет 1.5 метра, а ускорение аппарата при подаче сжатого воздуха в приводные пневматические цилиндры (2) составит 2g (19.8 м/сек*сек). По принятой терминологии это соответствует тройной перегрузке (перегрузка 3g). Кстати, допустимое значение перегрузок для пассажиров гражданских самолетов составляет 2,5g.
Тогда элементарные расчеты показывают: высота прыжка - 4.5 м, скорость в конце ускорения - 9.5 м/сек (34.2 км/час), время в полете - 0.25+1.8+0.25 сек (ускорение, свободный полет, замедление). Если вектор скорости отклонить вперед и не делать паузу между прыжками, можно перемещаться по курсу со скоростью 15-20 км/час.
Для того, чтобы подбросить аппарат общим весом в 500 кг с перегрузкой в 3g необходимо приложить усилие в 1500 кг - по 750 кг на каждый цилиндр. При давлении сжатого воздуха в системе в 7.5 бар площадь поршня составит 100 квадратных сантиметров (диаметр 113 мм). Объем обоих приводных пневматических цилиндров (2) получается 30 литров и соответственно объем ресивера высокого давления (12) порядка 120 литров при давлении в нем в 9.4 бара. В течение четверти секунды сжатый воздух из ресивера устремляется в цилиндры, поршни выдвигаются, объем, занимаемый воздухом увеличивается со 120 до 150 литров. При этом аппарат развивает мощность 1500*1.5/0.25=9000 кг*м/сек, т.е. 90 кВт. Через 1.8 секунды аппарат приземляется, поршни выталкивают сжатый воздух обратно в ресивер, энергия, затраченная на подбрасывание аппарата, в основном возвращается.
Когда кенгуру совершает мощный прыжок вверх - вперед, его тело наклонено вперед таким образом, что вектор сил от задних конечностей направлен немного ниже центра тяжести тела. Это позволяет животному кроме линейной скорости получить импульс вращения, дающий возможность развернуть задние ноги вперед, навстречу приближающейся земле. После отрыва от земли тело кенгуру находится в свободном полете и, если неожиданно возникает необходимость скорректировать положения туловища в пространстве, животное использует в качестве противовеса массивный хвост.
Конструкция описываемого здесь аппарата не позволяет оперативно изменять направление вектора сил отталкивания относительно центра тяжести конструкции, вместо этого все маневры в вертикальной курсовой плоскости (с) - смотри рисунок - осуществляются с помощью гиродина (7). Если во фронтальной плоскости (в) стабильность аппарата обеспечивается разнесением опорных цилиндров по краям корпуса, в плоскости (с) аппарат поддерживается и управляется динамически, - и на земле, и в полете; ножки (9) используются в стояночном режиме.
Динамическое управление положением корпуса в пространстве осуществляется путем оперативного ускорения или замедления маховика (15). Если с помощью привода (14) начать ускорять маховик, точно такой же по величине, но противоположный по направлению момент вращения прикладывается к корпусу аппарата и тот разворачивается в требуемом направлении, если находится в это время в свободном полете. Если аппарат стоит на неустойчивых двух опорах (6), манипулируя маховиком, можно поддерживать его в равновесии, а в нужный момент резко наклонить вперед, в сторону предстоящего прыжка.
Гиродины широко применяются в космических аппаратах для точной ориентации корпуса аппарата в пространстве по трем осям. Такие трехосевые гиродины сложны в управлении, поскольку при изменении момента импульса одного маховика необходимо учитывать силы прецессии, возникающие в двух других. В настоящем аппарате используется одноосевой гиродин, а прецессия маховика используется для изменения курса движения аппарата - поворота в плоскости (а).
Цикл прыжка длится не более двух секунд и за это время нужно провести целый ряд взаимно согласованных манипуляций с оборудованием, оценить состояние датчиков; любая ошибка чревата потерей равновесия и падением аппарата. Поэтому управление процессом должен осуществлять контроллер (4). Алгоритм управления должен учитывать все детали процесса, остановимся лишь на основных моментах.
Оператор задает с пульта управления (3) режим движения: - непрерывный, отдельными прыжками, скорость перемещения, высоту прыжков, корректирует курс. Перед началом движения запускается двигатель (20) с компрессором (11) и запасается сжатый воздух в ресиверах (12) и (13). После этого поднимаются ножки (9) и аппарат переходит в режим динамического равновесия, балансируя с помощью гиродина (7) на двух опорах (6) в вертикальной курсовой плоскости (с). В момент прыжка гиродин разворачивает аппарат на нужный угол в сторону прыжка. В тот же момент воздух подается в приводные пневматические цилиндры (2).
Управляющий контроллер постоянно отслеживает положение аппарата в пространстве с помощью датчика ориентации (19) и отрабатывает необходимые изменения угла поворота гиродином. Воздействия на гиродин осуществляются через регулирующую арматуру кулачкового компрессора (16). Это система электрически управляемых пневматических вентилей и клапанов, связывающих ресивер (13) с кулачковым компрессором (14). Энкодер (17) дает информацию контроллеру о текущем направлении и скорости вращения маховика (15). Если необходимо ускорить маховик в ту или иную сторону, сжатый воздух из ресивера подается на вход или соответственно выход компрессора, который в этом режиме работает, как двигатель, - энергия сжатого воздуха из ресивера переходит в кинетическую энергию маховика.
При необходимости замедлить маховик, клапаны и вентили регулирующей арматуры устанавливаются в позицию, когда устройство (14) переходит в режим компрессора, сжимает наружный воздух и направляет его снова в ресивер (13), - кинетическая энергия маховика переходит в энергия сжатого воздуха.
При движении аппарата гиродин производит разнонаправленные повторяющиеся воздействия на корпус, при этом маховик то ускоряется, то замедляется относительно какой-то более или менее постоянной скорости вращения. При наличии постоянного возмущающего воздействия на корпус или значительной разбалансировки положения груза скорость вращения маховика может выйти за допустимые пределы. Тогда контроллер принудительно останавливает аппарат, выдвигает ножки (9) и «разгружает» маховик, при этом ножки воспринимают возникающую силовую реакцию гиродина.
Алгоритм участия контроллера в управлении приводными пневматическими цилиндрами (2) также включает ряд моментов. Контроллер воздействует на силовые цилиндры через электрически управляемые клапаны и вентили регулирующей арматуры приводных цилиндров (18).
Прыжок начинается в момент, когда корпус аппарата займет исходное положение, информацию об этом контроллер получает от датчика ориентации (19). Контроллер дает команду на подачу сжатого воздуха в цилиндры (2), причем, время, на которое открываются клапаны подачи воздуха, задается раздельно для каждого цилиндра и регулируется в зависимости от заданной высоты прыжка. Разное давление в цилиндрах позволяет компенсировать неровности фунта, а также реализовать поворот аппарата по курсу.
Грунт, от которого отталкивается аппарат не всегда достаточно прочный, и поэтому часть энергии, подаваемый в цилиндры в виде сжатого воздуха расходуется на уплотнение почвы (или снега). В этом случае при приземлении аппарата не удастся продавить весь воздух из цилиндров обратно в ресивер и поршни не дойдут до верхнего положения. Для решения этой проблемы контроллер, располагая информацией от акселерометра (19) о полученном аппаратом механическим импульсе при отталкивании от земли, в нужный момент дает команду на открытие соответствующего клапана и перепускает часть воздуха в ресивер низкого давления (13).
Гидравлическое сидение оператора (8) предназначено для смягчения возможных резких толчков и облегчения преодоления оператором рабочих перегрузок при отталкивании аппарата от фунта и при его приземлении.
1 - корпус
2 - приводные пневматические цилиндры
3 - пульт управления
4 - контроллер
5 - поршни
6 - опорные площадки
7 - гиродин
8 - гидравлическое сидение
9 - ножки
10 - пневматический привод ножек
11 - компрессор
12 - ресивер высокого давления
13 - ресивер низкого давления
14 - кулачковый компрессор
15 - маховик
16 - регулирующая арматура кулачкового компрессора
17 - энкодер
18 - регулирующая арматура приводных цилиндров
19 - датчик ориентации и акселерометр
20 - двигатель внутреннего сгорания
а - поверхность земли
b - фронтальная плоскость
с - вертикальная курсовая плоскость
d - маховик
е - направление движения аппарата
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЫЖЕРОЛЛЕРЫ "РУССКИЙ ВЕЗДЕХОД" | 2004 |
|
RU2284207C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПРЫЖКАМИ | 2004 |
|
RU2286191C2 |
| Способ обеспечения возможности езды на роликовых коньках с одним роликом | 2015 |
|
RU2667224C2 |
| Способ подготовки летного состава к аварийному покиданию летательного аппарата и устройство его реализующее | 2024 |
|
RU2832486C1 |
| Способ управляемого спуска космического аппарата с околоземной орбиты на участке гиперзвуковых скоростей | 2018 |
|
RU2732644C2 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| КАТАПУЛЬТА ДЛЯ ВЗЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2497725C1 |
| Тренажер для парашютно-спасательной подготовки летного состава авиации | 2022 |
|
RU2792911C1 |
| Тренажер для наземной подготовки парашютиста | 2023 |
|
RU2806470C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки и устройство его реализующее | 2021 |
|
RU2769481C1 |
Группа изобретений относится к способу и устройству для передвижения прыжками. Аппарат для передвижения по пересеченной местности состоит из корпуса с жестко закрепленными на нем двумя приводными пневматическими цилиндрами. Приводные пневматические цилиндры присоединены к ресиверам высокого и низкого давления через регулирующую арматуру, а компрессор присоединен к ресиверам высокого и низкого давления. Ориентация и стабилизация аппарата в пространстве осуществляется с помощью гиродина - маховика с приводом. Поршни приводного пневматического цилиндра заканчиваются опорными площадками, на которые опирается аппарат при работающем гиродине. Достигается повышение надежности и стабильности передвижения устройства отдельными или непрерывно следующими друг за другом прыжками. 2 н. и 7 з.п. ф-лы, 1 ил.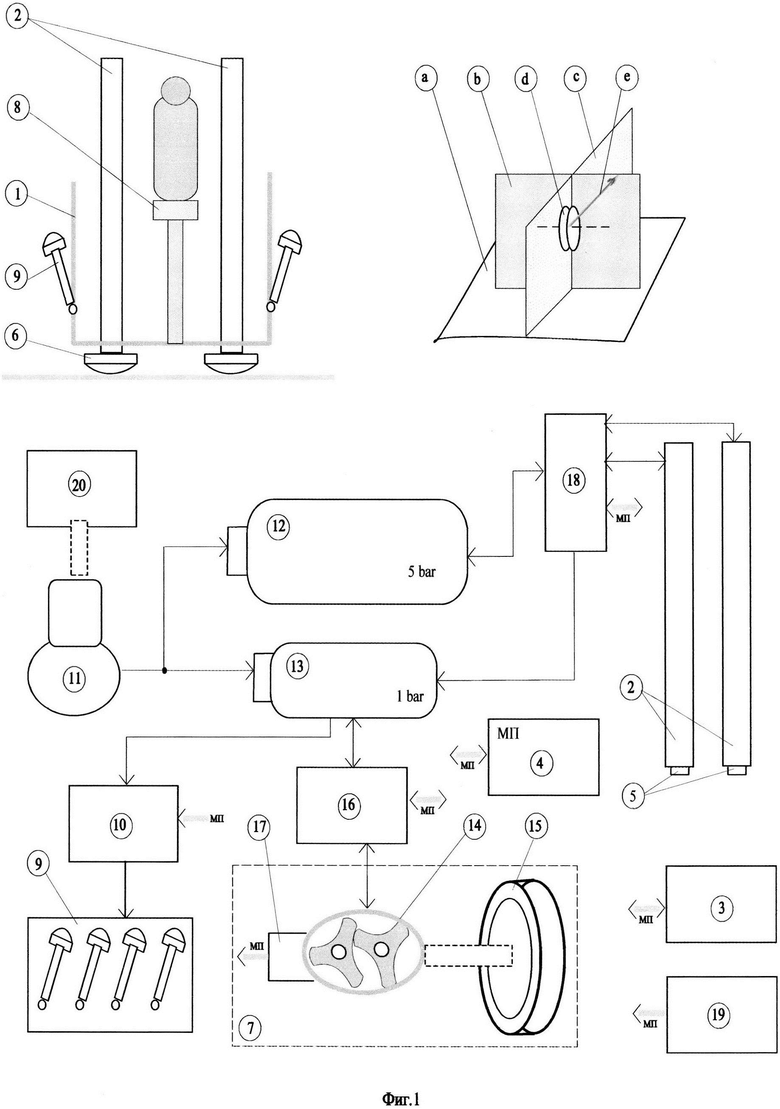
1. Способ передвижения по пересеченной местности, состоящий в том, что перемещение аппарата осуществляется отдельными или непрерывно следующими друг за другом прыжками, при этом аппарат подбрасывается с помощью двух приводных пневматических цилиндров, а энергия, затрачиваемая на подбрасывание аппарата, в основном возвращается при его приземлении, отличающийся тем, что ориентация и стабилизация аппарата в пространстве осуществляется с помощью гиродина - маховика с приводом.
2. Способ по п. 1, отличающийся тем, что ось маховика расположена горизонтально и перпендикулярно направлению движения, а главной функцией гиродина является разворачивание аппарата в вертикальной курсовой плоскости в процессе выполнения прыжка.
3. Способ по п. 1, отличающийся тем, что поворот аппарата по курсу осуществляется силами прецессии маховика, для возникновения которых в приводных пневматических цилиндрах целенаправленно создается разница в давлении.
4. Способ по п. 1, отличающийся тем, что процесс выполнения прыжка полностью автоматизируется за счет того, что управление гиродином и приводными цилиндрами осуществляется контроллером в соответствии с заданным алгоритмом.
5. Способ по п. 1, отличающийся тем, что алгоритм работы контроллера учитывает задаваемый оператором режим движения, результат взаимодействия опорных площадок с грунтом при отталкивании и приземлении аппарата.
6. Устройство, позволяющее реализовать способ передвижения по пересеченной местности по пп.1-5, состоит из корпуса (1) с жестко закрепленными на нем приводными пневматическими цилиндрами (2), причем приводные пневматические цилиндры (2) присоединены к ресиверам высокого (12) и низкого (13) давления через регулирующую арматуру (18), а компрессор (11) присоединен к ресиверам высокого (12) и низкого (13) давления, отличающееся тем, что поршни (5) приводного пневматического цилиндра (2) заканчиваются опорными площадками (6), на которые опирается аппарат при работающем гиродине (7).
7. Устройство по п. 6, отличающееся тем, что гиродин (7), состоящий из механически связанных маховика (15) и кулачкового компрессора (14), присоединен к ресиверу низкого давления (13) через регулирующую арматуру кулачкового компрессора (16).
8. Устройство по п. 6, отличающееся тем, что к ресиверу низкого давления (13) подключены пневматические привода (10) ножек (9), которые поддерживают аппарат при неработающем гиродине (7).
9. Устройство по п. 6, отличающееся тем, что контроллер (4) получает информацию с пульта управления (3), датчика ориентации и акселерометра (19), энкодера гиродина (17), регулирующей арматуры кулачкового компрессора (16), регулирующей арматуры приводных цилиндров (18), обрабатывает ее в соответствии с текущим алгоритмом и осуществляет управляющие воздействия на регулирующую арматуру приводных цилиндров (18), регулирующую арматуру кулачкового компрессора (16) и пневматический привод ножек (10).
| US 20110186360 A1, 04.08.2011 | |||
| Способ закрытия люков грузовых судов | 1952 |
|
SU97328A1 |
| CN 107284545 A, 24.10.2017 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| CN 102815349 A, 12.12.2012 | |||
| БОЕВАЯ МАШИНА-РОБОТ | 2016 |
|
RU2624116C1 |

