Изобретение относится к робототехнике, а именно к шагающим мобильным микророботам, и предназначено для осуществления работ в экстремальных ситуациях, преимущественно в условиях открытого космоса и выполнения задач напланетных миссий. Важным условием для возможности использования такого класса устройств является наличие у них возможности фиксации на поверхности перемещения
Известен робот-альпинист, конструкция которого предусматривает использование адгезивных элементов для закрепления на поверхности перемещения (US 2012181096 [1]). В качестве адгезивных элементов в преимущественном варианте реализации предлагается использовать вакуумные присоски, закрепленные на снабженной соответствующим приводом движущейся ленте, охватывающей опору.
Недостатком известной конструкции является ее сложность и значительные массогабаритные характеристики, что ограничивает их применение для выполнения задач напланетных миссий.
Известна конструкция ноги для многоногого шагающего робота, содержащая гибкую ступню с выполненными в ней отверстиями для подачи жидкого адгезива на нижнюю, контактную поверхность (CN 201784730 [2]). Над ступней размещается резервуар с жидким адгезивом со средством создания в нем избыточного давления, обеспечивающим подачу адгезива на контактную поверхность ступни.
Недостатком известной конструкции является ее сложность и значительные массогабаритные характеристики, что ограничивает их применение для выполнения задач напланетных миссий.
Наиболее близким к заявляемому изобретению по своей технической сущности и достигаемому эффекту является шагающий робот, предназначенный для выполнения работ в открытом космосе, в частности для инспекции поверхности аппаратов (US 2007173973 [3]). Ступня робота выполнена в виде пластины, закрепленной на стержне (голеностопе) по ее центру, а средством фиксации ноги на поверхности перемещения служит слой адгезива, нанесенный на поверхность контакта ступни с поверхностью перемещения.
Недостатком известной конструкции ступни является ее невозможность адаптации к неровностям поверхности перемещения при высоте неровностей, превышающей толщину адгезива, что приводит к уменьшению поверхности контакта и снижает надежность фиксации робота к поверхности перемещения. Кроме того, ступня робота выполнена в виде пластины, что также снижает надежность фиксации робота к поверхности перемещения. Известно также, что усилие отрыва зачастую превосходит усилие прижатия, при этом известная конструкция не позволяет уменьшить усилие отрыва из-за изотропной жесткости пластины.
Заявляемая конструкция ступни ноги шагающего космического микроробота направлена на повышение надежности фиксации на поверхности перемещения.
Указанный результат достигается тем, что ступня ноги шагающего космического микроробота выполнена в виде пластины с закрепленным на поверхности ее контакта с поверхностью перемещения средством фиксации. При этом ступня соединена пяткой с ногой с помощью шарнира с одной степенью свободы, пластина выполнена из гибкого диэлектрического материала с размещенными на ней с промежутками между собой жесткими элементами так, что их суммарная площадь на единице поверхности пластины монотонно убывает от пятки к носку, а средство фиксации выполнено в виде отдельных, не контактирующих между собой и покрытых слоем диэлектрика проводников, подключенных к разным полюсам источника напряжения.
Указанный результат достигается также тем, что жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку.
Указанный результат достигается также тем, что жесткие элементы выполнены с разной площадью, убывающей от пятки к носку
Указанный результат достигается также тем, что суммарная площадь жестких элементов на единице поверхности пластины монотонно убывает от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку.
Указанный результат достигается также тем, что жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку.
Указанный результат достигается также тем, что жесткие элементы выполнены с разной площадью, убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через пятки к носку.
Отличительными признаками заявляемого устройства являются:
- ступня соединена пяткой с ногой с помощью шарнира с одной степенью свободы;
- пластина выполнена гибкой с размещенными на ней с промежутками между собой жесткими элементами;
- суммарная площадь жестких элементов на единице поверхности пластины монотонно убывает от пятки к носку;
- средство фиксации выполнено в виде отдельных, не контактирующих между собой и покрытых слоем диэлектрика проводников, подключенных к разным полюсам источника напряжения;
- жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку.
- жесткие элементы выполнены с разной площадью, убывающей от пятки к носку;
- суммарная площадь жестких элементов на единице поверхности пластины монотонно убывает от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку;
- жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку;
- жесткие элементы выполнены с разной площадью, убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через пятки к носку;
- подключенные к разным полюсам источника напряжения проводники образуют две ориентированные зубьями навстречу друг другу и вдвинутые друг в друга гребенки.
Выполнение пластины гибкой обеспечивает адаптацию ступни по неровной поверхности перемещения и этим обеспечивает увеличение площади контакта между ступней и поверхностью перемещения.
Размещение на пластине с промежутками между собой жестких элементов не влияет на адаптацию ступни к поверхности перемещения, но предотвращает ее скручивание, т.к. жесткие элементы выполняют роль грузиков и обеспечивают прижим ступни к поверхности перемещения.
Выполнение средства фиксации ступни к поверхности перемещения в виде отдельных, не контактирующих между собой и покрытых слоем диэлектрика проводников, подключенных к разным полюсам источника напряжения обеспечивает «прилипание» к поверхности перемещения. Электростатический прижим основан на эффекте поляризации диэлектриков при помещении их в электрическое поле. Молекулы диэлектрика превращаются в электрические диполи. Смещение зарядов внутри молекул проявляется как возникновение на одном из концов диэлектрика тонкого слоя с не скомпенсированным положительным зарядом, а на другом конце тонкого слоя с не скомпенсированным отрицательным зарядом. Преимуществом такой фиксации является возможность внешнего управления процессом «фиксация-отрыв» за счет возникновения сил сцепления, что применяют, например, для фиксации пластин в технологическом оборудовании при их обработке. При отключении напряжения электрическое поле исчезает и происходит релаксация заряда в диэлектрике. Время релаксации в диэлектрике зависит от материала и условий, в которых происходит процесс «поляризация-деполяризация», но во всех случаях достаточно для отрыва ступни от поверхности и последующего ее перемещения с ногой во время шага.
Покрытие проводников слоем диэлектрика необходимо для того, чтобы обеспечить его поляризацию с последующей фиксацией стопы к поверхности. При этом материал диэлектрика и толщина слоя выбираются из условий: диэлектрик должен быть гибким, образовывать пленку, электрически прочным, а его толщина должна быть достаточной для электрической изоляции стопы от поверхности, с одной стороны, и не избыточной для выбора управляющего напряжения (очевидно, что чем толще диэлектрик, тем выше управляющее напряжение), с другой.
Теоретическое значение усилия закрепления F идеального электростатического прижима при подаче на него напряжения V определяется оценочным выражением: F=(1/2)ε0εS(V/d)2,
где ε, d - диэлектрическая проницаемость и толщина диэлектрического слоя
Соединение ступни пяткой с ногой с помощью шарнира с одной степенью свободы и размещение жестких элементов на пластине так, что их суммарная площадь на единице поверхности пластины монотонно убывает от пятки к носку необходимо для того, чтобы преодолеть силу сцепления ступни с поверхностью перемещения, обусловленную наличием средства фиксации и обеспечить отрыв ступни от поверхности перемещения. Таким образом механика процесса «фиксация - отрыв» заключается в последовательном прикреплении пятки ступни с помощью средства фиксации, образовании узкой трещины, образуемой между поверхностью и пяткой ступни, увеличении поверхности контакта, с уменьшением величины трещины и в результате прикрепления ступни к поверхности с незначительным усилием по сравнению с со ступней, выполненной из жесткой пластинки. Отлипание ступни от поверхности начинается от пятки ступни к носку с последовательным увеличением трещины за счет ослабления сил сцепления при условии переменной жесткости, монотонно убывающей от пятки к носку. При отключении управляющего фиксацией напряжения, внешнее электрическое поле исчезает и происходит релаксация диэлектрика. После релаксации диэлектрика наступает момент отрыва ступни от поверхности. Затем цикл повторяется.
Для того, чтобы обеспечить выполнение условия монотонного убывания от пятки к носку суммарной площади жестких элементов на единице поверхности пластины можно использовать в частных случаях различные варианты реализации устройства. Можно жесткие элементы выполнять одинаковой площади, а промежутки между ними увеличивать от пятки к носку. А можно выполнять жесткие элементы с разной площадью, убывающей от пятки к носку. Кроме того, в частных случаях реализации целесообразно изменять жесткость ступни не только от пятки к носку, но и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку. Это обеспечит полный контакт ступни с поверхностью при условии неоднородностей поверхности по двум осям. При этом также возможны варианты реализации для выполнения этого условия. Можно жесткие элементы выполнять одинаковой площади и изменять промежутки между ними по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку, а можно выполнять жесткие элементы с разной площадью, уменьшающейся по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку.
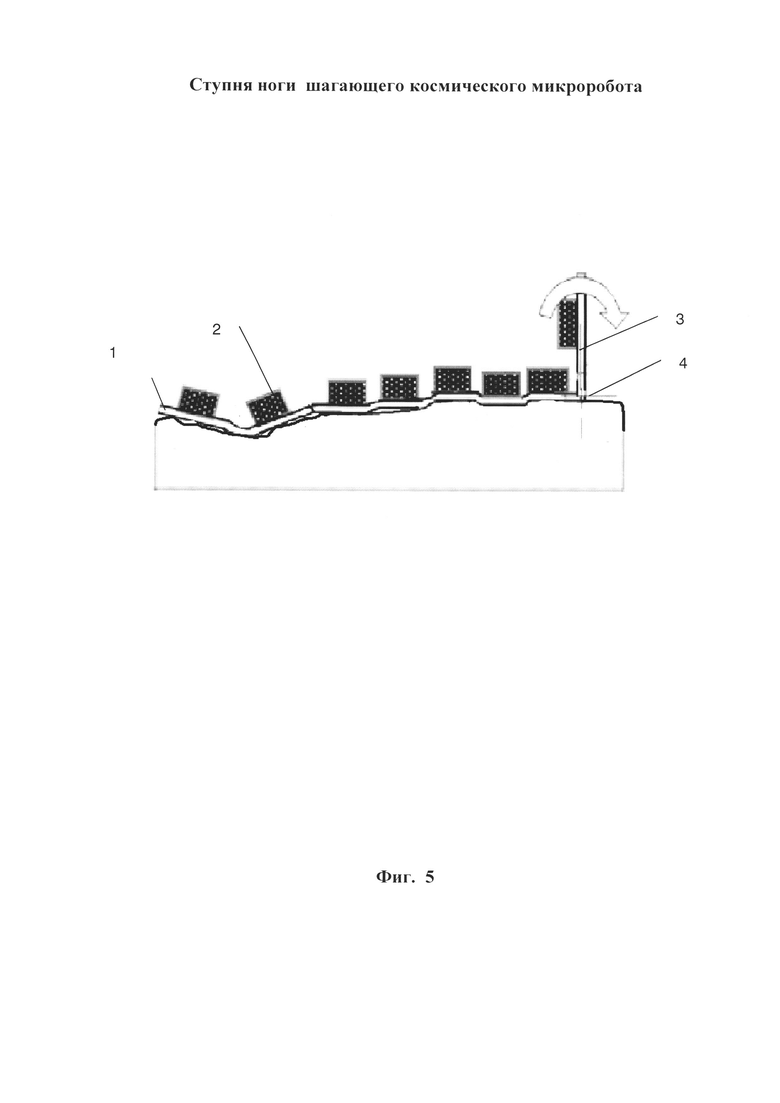
В частных случаях реализации целесообразно подключенные к разным полюсам источника напряжения проводники выполнять так, что они образуют две ориентированные зубьями навстречу друг другу и вдвинутые друг в друга гребенки. Это позволяет наиболее эффективно (по всей площади ступни) организовать распределение электрического поля, возникающего при подаче управляющего напряжения.
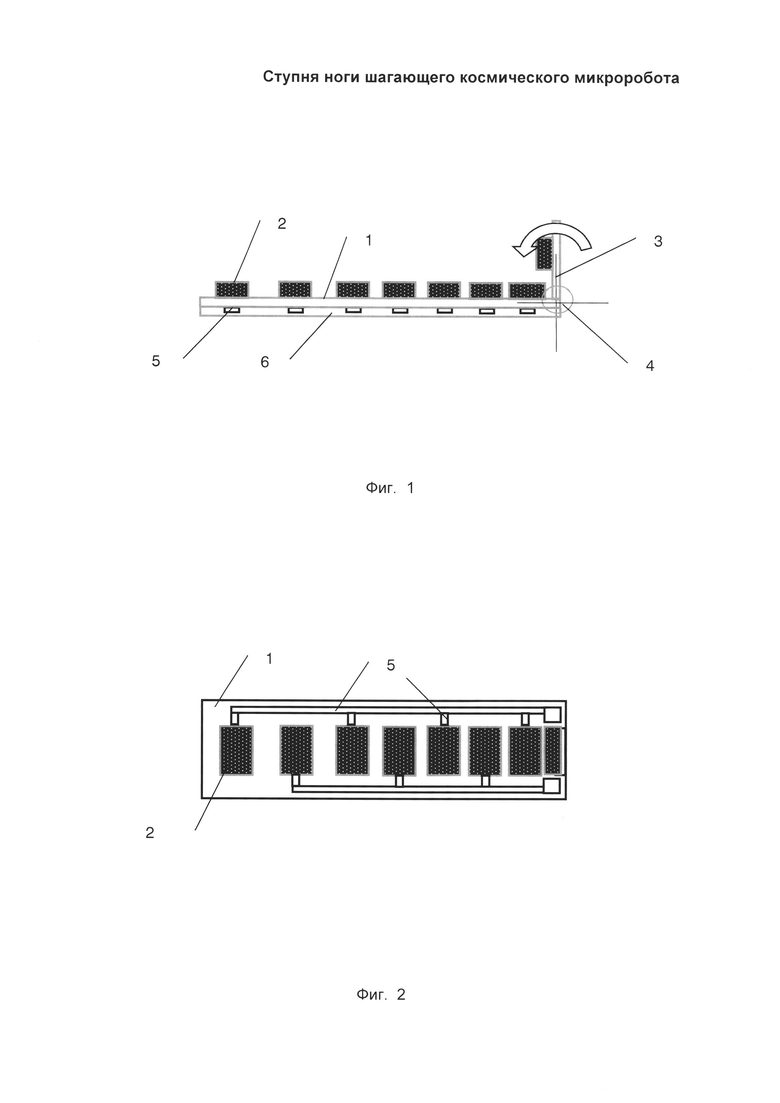
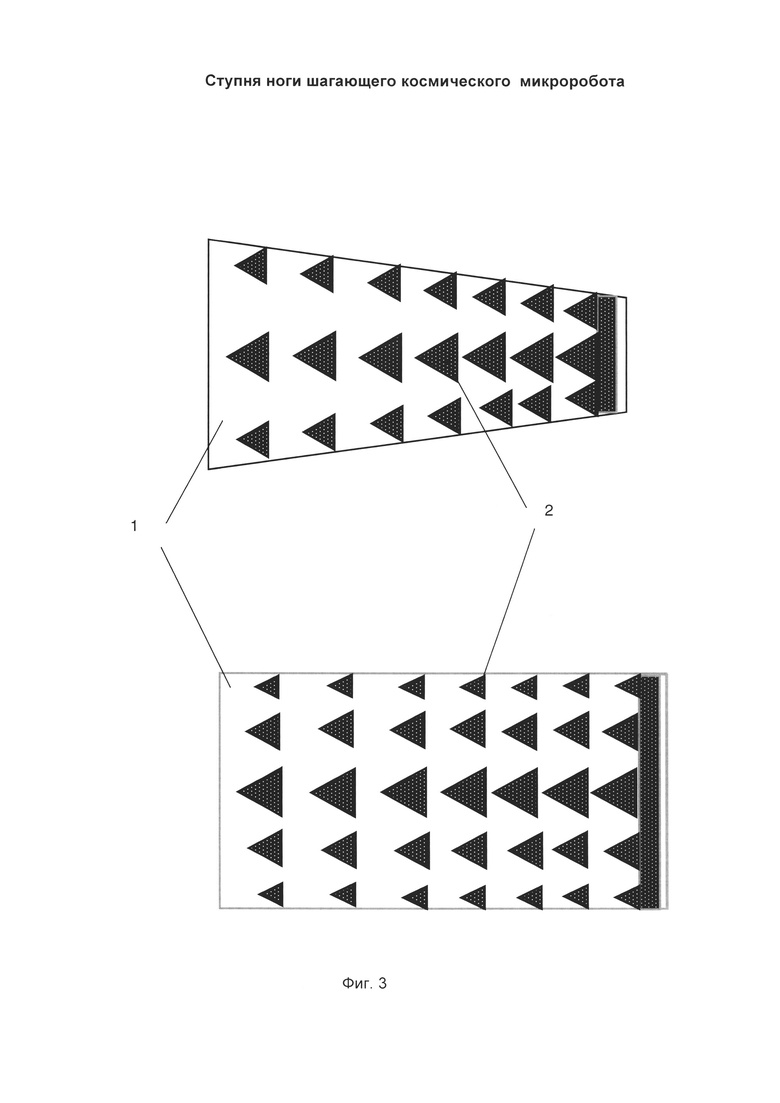
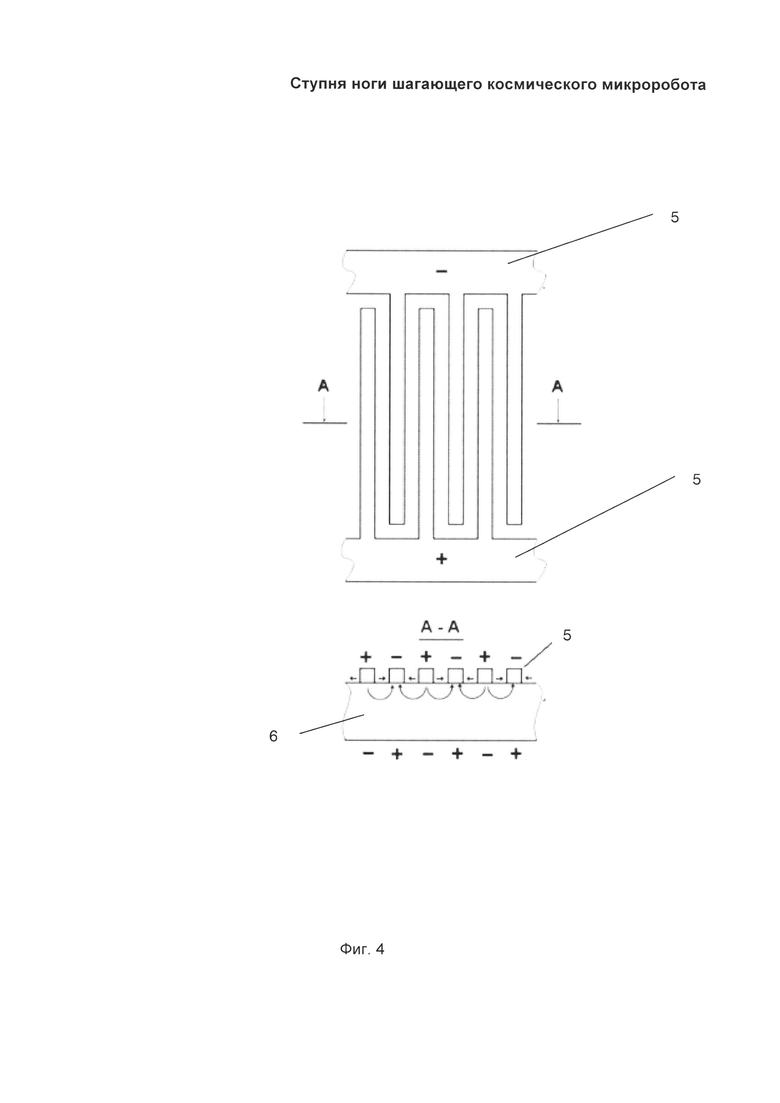
Сущность заявляемого устройства поясняется примерами реализации и чертежами. На фиг. 1 показан схематично вид сбоку на ступню, реализованную в наиболее общем виде. На фиг. 2 показан схематично вид сверху на ступню. На фиг. 3 представлены варианты реализации ступни (вид сверху) когда жесткие элементы выполнены с разной площадью, убывающей по направлению к периферии от оси симметрии, проходящей через пятки к носку. На фиг. 4 представлен вариант реализации ступни с электродами выполненными так, что они образуют две ориентированные зубьями навстречу друг другу и вдвинутые друг в друга гребенки и показано распределение зарядов и силовых линий электростатического поля. На фиг. 5 схематично показана адаптация ступни к поверхности перемещения.
Ступня ноги шагающего космического микроробота в самом общем случае представляет собой гибкую пластину 1 на которой размещены с промежутками между собой жесткие элементы 2 так, что их суммарная площадь на единице поверхности пластины монотонно убывает от пятки к носку. Ступня соединена пяткой с ногой 3 с помощью шарнира 4 с одной степенью свободы, На поверхность контакта пластины 1 с поверхностью перемещения нанесены подключенные к источнику напряжения проводники (электроды) 5, покрытые слоем диэлектрика 6. В качестве материала пластины 1 может использоваться полиимид, полиэфирамид, полисульфон или подобный полимер, формируемый из раствора с последующей полимеризацией. В качестве материала жестких элементов 2 может выступать монокристаллический кремний, поликристаллический кремний, поликор, металлы или пьезоэлектрические жесткие материалы - кварц, ниобат лития и пр. В качестве материала в качестве слоя диэлектрика 6 может использоваться полиимид, полиэфиримид, полисульфон или другой полимер, формируемый по растворной технологии.
Устройство функционирует следующим образом. При прилипании ступни к поверхности последовательно прикрепляется пятка ступни возле шарнира 4 с помощью сил притяжения возникающих при подаче напряжения на электроды 5 с постепенным увеличением площади контакта между ступней и поверхностью с уменьшением трещины между ступней и поверхностью и за счет переменной жесткости ступни (фиг. 3), обеспечиваемой суммарной площадью жестких элементов 2 (фиг. 3) на единице поверхности пластины монотонно убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку. При этом жесткие элементы 2 (фиг. 3) выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку, жесткие элементы могут быть выполнены с разной площадью (2, фиг. 3), убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через пятки к носку. В момент отлипания ступни от поверхности отключается подача напряжения на электроды 5 и процесс отсоединения от поверхности контакта начинается от пятки ступни к носку с последовательным увеличением трещины за счет отсутствия сил сцепления при условии переменной жесткости ступни, монотонно убывающей от пятки к носку за счет уменьшения площади жестких элементов 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ступня ноги для шагающего космического микроробота | 2017 |
|
RU2675327C1 |
| Ступня ноги шагающего космического микромеханизма | 2017 |
|
RU2667593C1 |
| Шагающий инсектоморфный мобильный микроробот | 2018 |
|
RU2699209C1 |
| Ползающий космический микроробот-инспектор | 2021 |
|
RU2771501C1 |
| ОДНОРАЗОВЫЕ ТАПОЧКИ С ТОКОПРОВОДЯЩИМИ ВСТАВКАМИ | 2021 |
|
RU2772420C1 |
| УСТРОЙСТВО ДЛЯ НОРМАЛИЗАЦИИ ПОЛОЖЕНИЯ ЧЕЛОВЕКА В КОСМИЧЕСКОМ АППАРАТЕ | 2008 |
|
RU2475430C2 |
| ПОДОШВА ОБУВИ | 1992 |
|
RU2037312C1 |
| ОБУВЬ С АККУМУЛИРОВАНИЕМ ЭНЕРГИИ | 2008 |
|
RU2380011C1 |
| ОБЛЕГЧАЮЩАЯ СТЕЛЬКА ДЛЯ ОБУВИ НА КАБЛУКЕ | 2015 |
|
RU2601252C1 |
| ОБУВЬ С АККУМУЛИРОВАНИЕМ ЭНЕРГИИ, СОЗДАВАЕМОЙ ПРИ ДВИЖЕНИИ | 2008 |
|
RU2380995C2 |
Изобретение относится к робототехнике, а именно к шагающим мобильным роботам, и предназначено для осуществления работ в экстремальных ситуациях, преимущественно в условиях открытого космоса и выполнения задач напланетных миссий. Ступня ноги шагающего космического микроробота выполнена в виде пластины с закрепленным на поверхности ее контакта с поверхностью перемещения средством фиксации. При этом ступня соединена с ногой пяткой с помощью шарнира с одной степенью свободы. Пластина выполнена из гибкого диэлектрического материала с размещенными на ней с промежутками между собой жесткими элементами так, что их суммарная площадь на единице площади поверхности пластины монотонно убывает от пятки к носку. А средство фиксации выполнено в виде отдельных, не контактирующих между собой и покрытых слоем диэлектрика проводников, подключенных к разным полюсам источника напряжения. Изобретение обеспечивает повышение надежности фиксации на поверхности перемещения. 6 з.п. ф-лы, 5 ил.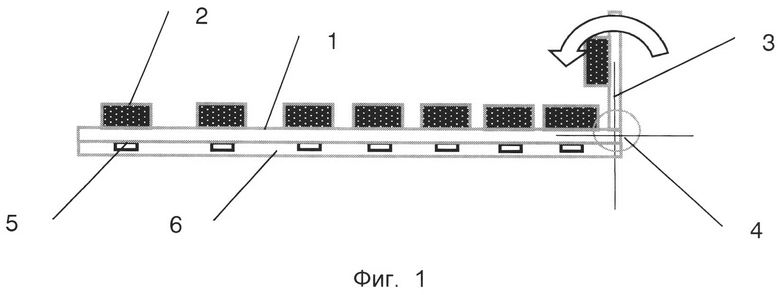
1. Ступня ноги шагающего космического микроробота, выполненная в виде пластины с закрепленным на поверхности ее контакта с поверхностью перемещения средством фиксации, отличающаяся тем, что ступня выполнена с возможностью соединения с ногой пяткой с помощью шарнира с одной степенью свободы, пластина выполнена из гибкого диэлектрического материала с размещенными на ней с промежутками между собой жесткими элементами так, что их суммарная площадь на единице площади поверхности пластины монотонно убывает от пятки к носку, а средство фиксации выполнено в виде отдельных, не контактирующих между собой и покрытых слоем диэлектрика проводников, подключенных к разным полюсам источника напряжения.
2. Ступня по п. 1, отличающаяся тем, что жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку.
3. Ступня по п. 1, отличающаяся тем, что жесткие элементы выполнены с разной площадью, убывающей от пятки к носку.
4. Ступня по п. 1, отличающаяся тем, что суммарная площадь жестких элементов на единице площади поверхности пластины монотонно убывает от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку.
5. Ступня по п. 4, отличающаяся тем, что жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку.
6. Ступня по п. 4, отличающаяся тем, что жесткие элементы выполнены с разной площадью, убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через пятку к носку.
7. Ступня по п. 1, отличающаяся тем, что подключенные к разным полюсам источника напряжения проводники образуют две ориентированные зубьями навстречу друг другу и вдвинутые друг в друга гребенки.
| WO 2008051289 A2, 02.05.2008 | |||
| US 20070173973 A1, 26.07.2007 | |||
| US 20170106924 A1, 20.04.2017 | |||
| CN 201784730 U, 06.04.2011 | |||
| МИКРОСИСТЕМНЫЙ КОСМИЧЕСКИЙ РОБОТ-ИНСПЕКТОР (ВАРИАНТЫ) | 2014 |
|
RU2566454C2 |

