Область техники
Изобретение относится к микроробототехнике, а именно к мобильным микророботам, и предназначено для осуществления инспекционных работ на солнечных батареях (СБ) космических аппаратов (КА) и/или Международной космической станции (МКС) в экстремальных ситуациях, преимущественно для минимизации рисков человека (космонавта) в условиях открытого космоса.
Уровень техники
Из уровня техники известно техническое решение «Шагающий инсектоморфный мобильный микроробот» [Болотник Н.Н., Горячева И.Г., Жуков А.А., Смирнов И.П., Самохвалов Г.В. Шагающий инсектоморфный мобильный микроробот // опубл.: 03.09.2019. Бюл. № 25. Пат. РФ RU 2 699 209]. Согласно известному техническому решению микроробот содержит корпус, систему управления движением и движитель в виде ног, приводимых в движение термомеханическими микроактюаторами. Каждая из ног выполнена в виде зигзага из четырех ортогонально соединенных балок. Первая балка закреплена перпендикулярно боковой поверхности корпуса. Вторая балка расположена параллельно боковой поверхности корпуса под углом не менее 30 угловых градусов к поверхности перемещения и ориентирована в направлении движения микроробота. Третья балка выполнена из двух частей, соединенных между собой шарниром. А к четвертой балке присоединена шарниром ступня, состоящая из пальцев, снабженных термомеханическими микроактюаторами. Все балки, кроме первой, снабжены термомеханическими микроактюаторами. При этом микроробот имеет не менее чем шесть ног.
Основными недостатками известного устройства являются:
- невозможность точного позиционирования микроробота для инспекции поверхностей, состоящих из мозаичных элементов, например, солнечных батарей (СБ) космических аппаратов (КА) или Международной космической станции (МКС) из-за конструктивных особенностей движителей (микроактюаторов);
- ограниченность жизненного цикла из-за использования адгезионного слоя («сухих» адгезивов), т.к. по мере эксплуатации адгезионный слой «забивается»;
- низкая технологичность изготовления конструкции, связанная с формированием движителей (микроактюаторов);
- низкая работоспособность ползающего космического микроробота-инспектора в условиях космического пространства из-за воздействия атомарного кислорода на термомеханические микроактюаторы.
Наиболее близким по технической сущности и достигаемому техническому результату является техническое решение «Микросистемный космический робот-инспектор (варианты)», изложенное в [Смирнов И.П., Козлов Д.В., Жуков А.А., Чащухин В.Г., Градецкий В.Г., Болотник Н.Н. Микросистемный космический робот-инспектор (варианты) // опубл.: 27.10.2015. Бюл. № 30. Пат. РФ RU 2 566 454] и принятое за прототип.
Согласно известному техническому решению микросистемный космический робот-инспектор включает в свой состав:
– несущую платформу с располагаемыми на ней блоками функциональной нагрузки;
– подвижные исполнительные элементы в виде термомеханических актюаторов в количестве не менее 8, закрепленные с нижней стороны несущей платформы, каждый из которых разделен на основную и дополнительную деформируемые зоны с канавками, соединенные гибкой полиимидной вставкой, при этом канавки в деформируемых зонах термомеханических актюаторов обращены в противоположные направления, на дополнительную деформируемую зону с нижней стороны в месте соприкосновения с поверхностью нанесен адгезионный слой, термомеханические актюаторы расположены как минимум в двух параллельных рядах, образующих как минимум две подвижные «ноги» в каждом из рядов, причем в каждом ряду как минимум 4 термомеханических актюатора, при этом каждая пара термомеханических актюаторов в ряду расположена под углом 180 градусов друг к другу в горизонтальной плоскости и образует подвижную «ногу» микросистемного космического робота-инспектора;
– источник питания.
Робот-инспектор может управляемо перемещаться в двух направлениях и переносить полезные грузы при эксплуатации в космосе.
Основными недостатками известного устройства являются:
- невозможность точного позиционирования микроробота для инспекции поверхностей, состоящих из мозаичных элементов, например, солнечных батарей (СБ) космических аппаратов (КА) или Международной космической станции (МКС) из-за конструктивных особенностей движителей (микроактюаторов);
- ограниченность жизненного цикла из-за использования адгезионного слоя («сухих» адгезивов), т.к. по мере эксплуатации адгезионный слой «забивается»;
- низкая технологичность изготовления конструкции, связанная с формированием движителей (микроактюаторов);
- низкая работоспособность ползающего космического микроробота-инспектора в условиях космического пространства (из-за воздействия атомарного кислорода на термомеханические микроактюаторы).
Раскрытие изобретения
Техническим результатом заявленного изобретения является:
– расширение функциональных возможностей за счет возможности точного позиционирования ползающего космического микроробота-инспектора при инспекции поверхностей, состоящих из мозаичных элементов, например, фотоэлектронных преобразователей СБ КА или МКС;
– работоспособность ползающего космического микроробота-инспектора в условиях космического пространства, устойчивость к жестким температурным условиям эксплуатации и воздействию атомарного кислорода;
– повышенный жизненный цикл из-за использования механических захватных устройств;
– повышенная технологичность, (за счет изготовления движителей-микроактюаторов отдельно от платформы с последующим монтажом конструкции), а значит, уменьшенная стоимость изготовления конструкции.
Указанный результат достигается тем, что движители- микроактюаторы жестко закреплены хвостовиками симметрично в ряд на одной поверхности с противоположных сторон несущей платформы под углом α к направлению движения микроробота, причем α составляет от 90 до 180 градусов.
Указанный результат достигается также тем, что свободные хвостовики движителей-микроактюаторов расположены вне габаритов несущей платформы.
Указанный результат достигается также тем, что движители-микроактюаторы имеют дугообразную форму с выпуклостью от поверхности перемещения.
Указанный результат достигается также тем, что расстояние между свободными хвостовиками каждого из движителей-микроактюаторов выбирается из соотношения
R≥z, где
R – расстояние между свободными хвостовиками каждого из движителей-микроактюаторов, z – шаг микроробота-инспектора.
Указанный результат достигается также тем, что движители-микроактюаторы на свободных хвостовиках оборудованы захватными устройствами.
Указанный результат достигается также тем, что длины каждых двух соседних движителей-микроактюаторов, расположенных на одной боковой стороне несущей платформы, отличаются на длину захватного устройства.
Указанный результат достигается также тем, что в качестве движителей-микроактюаторов используют движители-микроактюаторы с обратимой памятью формы.
Указанный результат достигается также тем, что в несущей платформе выполнены посадочные места травлением на глубину не менее ½ толщины платформы для прецизионного крепления хвостовиков движителей-микроактюаторов.
Указанный результат достигается также тем, что несущая платформа микроробота-инспектора выполнена в виде многослойной платы со сквозными металлизированными отверстиями для коммутации управления движителями-микроактюаторами.
Указанный результат достигается также тем, что несущая платформа микроробота-инспектора выполнена на основе пластины монокристаллического кремния и чередующихся слоев полиимида/нитрида и/или оксинитрида кремния и металла для коммутации.
Указанный результат достигается также тем, что толщина слоев нитрида кремния и/или оксинитрида кремния на полиимиде несущей платформы микроробота-инспектора выбирается в диапазоне 0,1…1,0 мкм.
Отличительными признаками заявляемого устройства являются следующие:
– движители-микроактюаторы жестко закреплены хвостовиками симметрично в ряд на одной поверхности с противоположных сторон несущей платформы под углом α к направлению движения микроробота, причем α составляет от 90 до 180 градусов включительно;
– свободные хвостовики движителей-микроактюаторов расположены вне габаритов несущей платформы;
– движители-микроактюаторы имеют дугообразную форму с выпуклостью от поверхности перемещения;
– расстояние между свободными хвостовиками каждого из движителей-микроактюаторов выбирается из соотношения
R≥z, где
R – расстояние между свободными хвостовиками каждого из движителей-микроактюаторов, z – шаг микроробота-инспектора;
– движители-микроактюаторы на свободных хвостовиках оборудованы захватными устройствами;
– длины каждых двух соседних движителей-микроактюаторов, расположенных на одной боковой стороне несущей платформы, отличаются на длину захватного устройства;
– в качестве движителей-микроактюаторов используют движители-микроактюаторы с обратимой памятью формы;
– в несущей платформе выполнены посадочные места травлением на глубину не менее ½ толщины платформы для прецизионного крепления хвостовиков движителей-микроактюаторов;
– несущая платформа микроробота-инспектора выполнена в виде многослойной платы со сквозными металлизированными отверстиями для коммутации управления движителями-микроактюаторами;
– несущая платформа микроробота-инспектора выполнена на основе пластины монокристаллического кремния и чередующихся слоев полиимида/нитрида и/или оксинитрида кремния и металла для коммутации;
– толщина слоев нитрида кремния и/или оксинитрида кремния на полиимиде несущей платформы микроробота-инспектора выбирается в диапазоне 0,1…1,0 мкм.
Жесткое крепление движителей-микроактюаторов хвостовиками симметрично в ряд на одной поверхности с противоположных сторон несущей платформы под углом от 90 до 180 градусов включительно к направлению движения микроробота так, что свободные хвостовики движителей-микроактюаторов, имеющих дугообразную форму с выпуклостью от поверхности перемещения, расположены вне габаритов несущей платформы, а расстояние между свободными хвостовиками каждого из движителей-микроактюаторов выбирается из соотношения R≥z, где R – расстояние между свободными хвостовиками каждого из движителей-микроактюаторов, z – шаг микроробота-инспектора, обеспечивает управляемое шагание ползающего микроробота по поверхности солнечных батарей космического аппарата с определенным геометрией шагом. Для перемещения микроробота-инспектора используются движители-микроактюаторы с обратимой памятью формы с захватными устройствами на незакрепленных хвостовиках. При инспекции поверхностей, состоящих из мозаичных элементов, например, фотоэлектронных преобразователей СБ КА или МКС, перемещение микроробота-инспектора осуществляется путем изменения формы микроактюаторов, хвостовики которых закрепляются в зазорах между солнечными элементами. Длина шага при этом определяется геометрическими размерами солнечных элементов батареи. Эти признаки в совокупности позволяют обеспечить повышенный жизненный цикл ползающего космического микроробота-инспектора за счет использования механических захватных устройств и расширение функциональных возможностей за счет точного позиционирования ползающего космического микроробота-инспектора.
Выполнение несущей платформы микроробота-инспектора в виде многослойной платы со сквозными металлизированными отверстиями для коммутации управления движителями-микроактюаторами на основе пластины монокристаллического кремния и чередующихся слоев полиимида/нитрида и/или оксинитрида кремния и металла для коммутации при толщине слоев нитрида кремния и/или оксинитрида кремния на полиимиде несущей платформы микроробота-инспектора в диапазоне 0,1…1,0 мкм позволяет обеспечить повышенную технологичность, а значит, уменьшенную стоимость изготовления конструкции.
Краткое описание чертежей
Признаки и сущность заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами, где показано следующее.
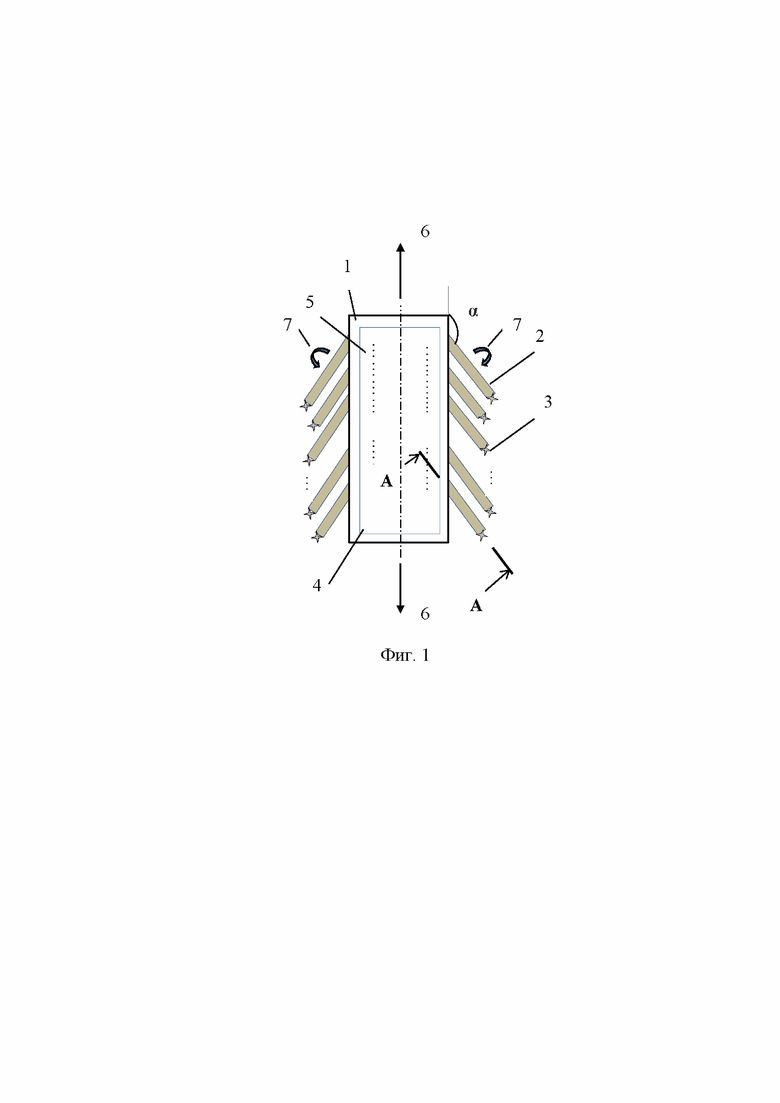
На фиг. 1 схематично представлен вид сверху ползающего космического микроробота-инспектора с движителями-микроактюаторами, закрепленными хвостовиками на несущей платформе симметрично с противоположных сторон платформы в ряд под углом α к направлению к движению микроробота-инспектора.
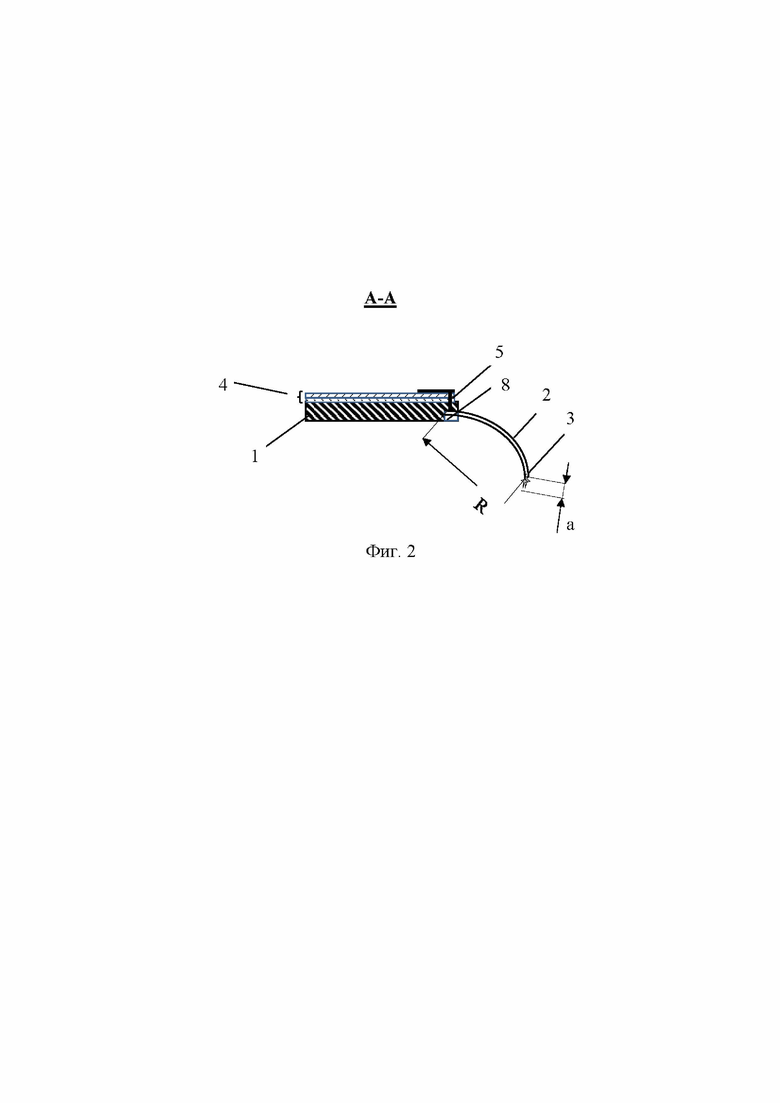
На фиг. 2 схематично представлено сечение несущей платформы ползающего космического микроробота-инспектора (по А-А, фиг. 1).
На фиг. 3 представлена фотография макета ползающего космического микроробота-инспектора
На фигурах 1, 2 обозначены следующие позиции:
1 – несущая платформа ползающего космического микроробота-инспектора с размещенными служебной и целевой нагрузками (не показано);
2 – движители-микроактюаторы;
3 – захватные устройства на незакрепленных хвостовиках движителей-микроактюаторов;
4 – многослойная плата;
5 – сквозные металлизированные отверстия многослойной платы;
6 – направление движения микроробота-инспектора;
7 – направление крепления движителей микроактюаторов (движители-микроактюаторы имеют дугообразную форму с выпуклостью от поверхности перемещения).
8 – посадочные места для прецизионного крепления хвостовиков движителей-микроактюаторов.
R – расстояние между хвостовиками каждого из движителей- микроактюаторов.
А – длина захватного устройства.
Примером предложенного устройства является ползающий космический микроробот-инспектор с движителями-микроактюаторами 2, закрепленными хвостовиками на несущей платформе 1 симметрично с противоположных сторон платформы в ряд под углом α к направлению к движению микроробота-инспектора, причем α выбрано из соотношения 90≤α≤180 угловых градусов. В таком варианте движение микроробота-инспектора может осуществляться поступательно по поверхности, состоящей из мозаичных элементов фотоэлектрических преобразователей (ФЭП), например, СБ КА или МКС. Захватными устройствами 3, оборудованными на незакрепленных хвостовиках пары крайних движителей-микроактюаторов 2 космический микроробот-инспектор зацепляется за край защитного стекла единичного ФЭП захватным устройством с образованием шарнира с осью, образованной краем защитного стекла. Затем под управляющим воздействием движители-микроактюаторы 2 деформируются, при этом несущая платформа 1 перемещается до касания края ФЭП захватными устройствами следующей симметричной пары движителей-микроактюаторов с их последующим зацеплением за края ФЭП. Одновременно предыдущая пара движителей-микроактюаторов освобождает захватные устройства 3, несущая платформа 1 меняет свое положение, перемещаясь поступательно на шаг. Затем цикл повторяется. Причем движители-микроактюаторы 2 могут быть выполнены на основе материалов с обратимой памятью формы (например, нитинол с добавками меди) или термомеханическими на основе пары материалов «кремний-полиимид». Несущая платформа 1 выполнена на основе монокристаллического кремния (например, марки КДБ) в виде многослойной платы 4 на основе структуры полиимид-нитрид/оксинитрид кремния, причем со сформированными сквозными металлизированными отверстиями. В монокристаллическом кремнии для прецизионного крепления хвостовиков движителей-микроактюаторов выполнены посадочные места 8, а крепление хвостовиков движителей-микроактюаторов осуществляется преимущественно микросваркой. В качестве полиимида используют полипиромеллитимид (продукт на основе конденсации пиромеллитового диангидрида и оксидианилина). Слои нитрида (Si3N4)/оксинитрида (SixNyOz) кремния, формируемые плазменным методом, располагают на поверхности полиимида для предотвращения эрозии полимера из-за воздействия атомарного кислорода. Толщина слоев нитрида кремния и/или оксинитрида кремния на полиимиде выбирается в диапазоне от 0,1 мкм до 1,0 мкм. Выбор диапазона толщины слоев нитрида и/или оксинитрида кремния обусловлен следующими физико-технологическими ограничениями: 0,1 мкм – это толщина сплошной, неостровковой пленки, формируемой известными, например, плазменными методами, а 1,0 мкм – максимальная толщина слоя с минимальными внутренними напряжениями.
Таким образом, предложено изобретение – ползающий космический микроробот-инспектор, обеспечивающий расширение функциональных возможностей за счет точного позиционирования при инспекции поверхностей, состоящих из мозаичных элементов, например, ФЭП СБ КА или МКС, повышенный ресурс из-за использования механических захватных устройств и устойчивости к воздействию атомарного кислорода, повышенную технологичность.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОСИСТЕМНЫЙ КОСМИЧЕСКИЙ РОБОТ-ИНСПЕКТОР (ВАРИАНТЫ) | 2014 |
|
RU2566454C2 |
| Шагающий инсектоморфный мобильный микроробот | 2018 |
|
RU2699209C1 |
| Космический мобильный робот-инспектор | 2022 |
|
RU2783640C1 |
| МИКРОСИСТЕМНОЕ УСТРОЙСТВО ТЕРМОРЕГУЛЯЦИИ ПОВЕРХНОСТИ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2518258C1 |
| МИКРОСИСТЕМНЫЙ ЁМКОСТНОЙ ДАТЧИК ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2013 |
|
RU2541415C1 |
| МИКРОСИСТЕМНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПОВЕРХНОСТЬЮ ДЛЯ КРЕПЛЕНИЯ МАЛОГАБАРИТНОЙ АНТЕННЫ | 2011 |
|
RU2456720C1 |
| Микросистема терморегулирования малых космических аппаратов | 2020 |
|
RU2725947C1 |
| Термомеханическая система обеспечения теплового режима космического аппарата | 2021 |
|
RU2774867C1 |
| ТЕПЛОВОЙ МИКРОМЕХАНИЧЕСКИЙ АКТЮАТОР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2010 |
|
RU2448896C2 |
| МИКРОСХЕМА С МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ ЗАЩИТОЙ ОТ ЭЛЕКТРИЧЕСКИХ И/ИЛИ ТЕПЛОВЫХ ПЕРЕГРУЗОК | 2011 |
|
RU2466496C1 |
Изобретение относится к микроробототехнике, а именно к мобильным микророботам, и предназначено для осуществления инспекционных работ на солнечных батареях космических аппаратов и/или Международной космической станции, в экстремальных ситуациях, преимущественно для минимизации рисков человека в условиях открытого космоса. Ползающий космический микроробот-инспектор содержит несущую платформу с размещенной служебной и целевой нагрузкой и движители–микроактюаторы, жестко закрепленные хвостовиками симметрично в ряд на одной поверхности с противоположных сторон несущей платформы под углом α, составляющим от 90 до 180 градусов включительно, к направлению движения. Свободные хвостовики расположены вне габаритов несущей платформы. Движители-микроактюаторы имеют дугообразную форму с выпуклостью от поверхности перемещения и на незакрепленных хвостовиках оборудованы захватными устройствами. Изобретение обеспечивает расширение функциональных возможностей за счет точного позиционирования при инспекции поверхностей, повышенный жизненный цикл, повышенную технологичность. 2 з.п. ф-лы, 3 ил.
1. Ползающий космический микроробот-инспектор, содержащий несущую платформу с размещенными служебной и целевой нагрузками и движители-микроактюаторы, отличающийся тем, что в качестве движителей-микроактюаторов использованы движители-микроактюаторы с обратимой памятью формы, причем
движители-микроактюаторы имеют дугообразную форму с выпуклостью от поверхности перемещения, причем
движители-микроактюаторы жестко закреплены хвостовиками симметрично в ряд на одной поверхности с противоположных сторон несущей платформы под углом α, составляющим от 90 до 180 градусов к направлению движения микроробота, причем
движители-микроактюаторы на свободных хвостовиках оборудованы захватными устройствами, причем
расстояние между свободными хвостовиками каждого из движителей-микроактюаторов выбирается из соотношения R≥z, где R – расстояние между свободными хвостовиками каждого из движителей-микроактюаторов, z – шаг микроробота-инспектора, причем
свободные хвостовики движителей-микроактюаторов расположены вне габаритов несущей платформы, кроме того,
несущая платформа микроробота-инспектора выполнена в виде многослойной платы со сквозными металлизированными отверстиями для коммутации управления движителями-микроактюаторами, причем
несущая платформа микроробота-инспектора выполнена на основе пластины монокристаллического кремния и чередующихся слоев полиимида/нитрида и/или оксинитрида кремния и металла для коммутации, причем
толщина слоев нитрида кремния и/или оксинитрида кремния на полиимиде несущей платформы микроробота-инспектора выбирается в диапазоне 0,1-1,0 мкм.
2. Ползающий космический микроробот-инспектор по п. 1, отличающийся тем, что длины каждых двух соседних движителей-микроактюаторов, расположенных на одной боковой стороне несущей платформы, отличаются на длину захватного устройства.
3. Ползающий космический микроробот-инспектор по п. 1, отличающийся тем, что в несущей платформе выполнены посадочные места травлением на глубину не менее 1/2 толщины платформы для прецизионного крепления хвостовиков движителей-микроактюаторов.
| МИКРОСИСТЕМНЫЙ КОСМИЧЕСКИЙ РОБОТ-ИНСПЕКТОР (ВАРИАНТЫ) | 2014 |
|
RU2566454C2 |
| Шагающий инсектоморфный мобильный микроробот | 2018 |
|
RU2699209C1 |
| Робототехническая система сервисного космического аппарата с силомоментной обратной связью | 2015 |
|
RU2620540C1 |
| US 20100145511 A1, 10.06.2010. | |||

