Изобретение относится к микроробототехнике, а именно к шагающим мобильным микророботам, и предназначено для осуществления работ в экстремальных ситуациях, преимущественно в условиях открытого космоса, невесомости, микрогравитации и выполнения задач напланетных миссий.
Известно устройство «Thermal-Powered, Insectlike Robot», представляющее собой подвижной робот, перемещающийся по разнородным поверхностям и способный перевозить груз, во много раз превышающий его вес [1]. Конструкция устройства представляет собой два массива термомеханических биморфных актюаторов, соединенных между собой платой с электропроводящими дорожками и расположенных крестообразно в группах по четыре штуки. Каждый из таких массивов образует подвижную ногу робота, позволяя ему перемещаться по ровным поверхностям за счет попеременного включения каждого из актюаторов. Термомеханические актюаторы в такой конструкции образованы двумя слоями полиимида с различными температурными коэффициентами линейного расширения. Робот может перемещаться по четырем направлениям в плоскости.
Недостатками известного технического решения являются невозможность перемещения по неплоским, рельефным поверхностям со ступенчатой неровностью, низкое значение деформации подвижных балок, низкая скорость перемещения робота по поверхности, невозможность перемещения по наклонным поверхностям.
Известное шагающее устройство [2] содержит корпус, к которому присоединены стержни, механизм качания и управляемый привод. Стержни выполнены в виде ног и представляют из себя механически связанные верхний рычаг, нижний рычаг и опору. Верхний рычаг снабжен управляемым приводом с функцией вращательного движения верхнего рычага в оси, параллельной оси тангажа корпуса, и связывает верхний рычаг с корпусом. Другой конец верхнего рычага связан с нижним рычагом посредством управляемого привода с функцией вращательного движения нижнего рычага в оси, параллельной оси крена корпуса, ортогонально оси вращательного движения верхнего рычага. Другой конец нижнего рычага связан с опорой. Функцию механизма качания обеспечивает конструкция ноги. Достигается упрощение кинематической конструкции шагающих устройств, предназначенных для перемещения по полу с возможностью переступания или обхода препятствий, смены статических положений корпуса в горизонтальной плоскости и с возможностью движения по ступенькам лестницы.
Недостатком известного устройства является громоздкость и сложность конструкции, а также значительные масса и габариты, что исключает возможность использования в условиях открытого космоса и выполнения задач напланетных миссий.
Известен мобильный пьезоэлектрический микроробот, содержащий подвижную платформу, пьезоэлектрические преобразователи, расположенные в вершинах равностороннего треугольника [3]. Система микроманипулирования содержит шаровую основу, постоянный магнит, пьезоэлектрические преобразователи, образующие декартову систему координат. Привод платформы представляет собой пьезокерамический трубчатый элемент с напыленными одним внутренним и четырьмя внешними симметрично расположенными электродами. Один конец пьезокерамического трубчатого элемента присоединен к втулке с проточенными пазами, в которые уложены провода. К другому свободному концу пьезокерамического трубчатого элемента приклеен рубиновый шарик. Пьезоэлектрические преобразователи системы микроманипулирования выполнены с напыленными одним внутренним и двумя внешними симметрично расположенными электродами и образуют декартову систему координат.
Недостатком известного устройства является то, что оно может двигаться только по плоской поверхности, сложность и низкая надежность конструкции, связанная с наличием движущихся с трением деталей.
Наиболее близким к заявляемому по своей технической сущности и достигаемому эффекту является микросистемный шагающий космический робот [4]. Шагающий мобильный микроробот, содержит корпус, систему управления движением и движитель в виде соединенных с корпусом нескольких ног, приводимых в движение термомеханическими актюаторами.
Недостатком известного устройства является то, что оно может двигаться только по плоской поверхности преодолевая выступы и ступеньки, однако оно не может адаптироваться к поверхности, имеющей сложный профиль, в результате чего часть ног движителя теряет контакт с поверхностью перемещения, что может лишить его возможности продолжать полноценное движение.
Заявляемый шагающий инсектоморфный мобильный микроробот направлен на повышение возможности адаптации к поверхности, имеющей сложный профиль.
Указанный результат достигается тем, что шагающий инсектоморфный мобильный микроробот, содержит корпус, систему управления движением и движитель в виде нескольких ног, приводимых в движение термомеханическими актюаторами. При этом каждая из ног выполнена в виде зигзага из четырех ортогонально соединенных балок, первая из которых закреплена перпендикулярно боковой поверхности корпуса, вторая расположена параллельно боковой поверхности корпуса под углом не менее 30 угловых градусов к поверхности перемещения и ориентирована в направлении движения микроробота. Все балки кроме первой снабжены термомехническими микроактюаторами, третья балка выполнена из двух частей, соединенных между собой шарниром, а к четвертой балке присоединена шарниром ступня, состоящая из пальцев, снабженных термомеханическими актюаторами, при этом микроробот имеет не менее чем шесть ног.
Указанный результат достигается также тем, что ступня выполнена в виде не менее трех плоских пальцев.
Указанный результат достигается также тем, что плоские пальцы ступни выполнены в форме трапеции меньшей стороной соединенной с шарниром.
Указанный результат достигается также тем, что плоские пальцы снабжены средством для адгезии к поверхности перемещения.
Отличительными признаками заявляемого устройства являются:
- каждая из ног выполнена в виде зигзага из четырех ортогонально соединенных балок, первая из которых закреплена перпендикулярно боковой поверхности корпуса, вторая расположена параллельно боковой поверхности корпуса под углом не менее 30 угловых градусов к поверхности перемещения и ориентирована в направлении движения микроробота, все балки кроме первой снабжены микроактюаторами, а третья балка выполнена из двух частей, соединенных между собой шарниром;
- микроробот снабжен не менее чем шестью ногами;
- ступня выполнена в виде не менее трех плоских пальцев;
- плоские пальцы снабжены термомеханическими актюаторами.
- плоские пальцы ступни соединены в шарнире;
- плоские пальцы ступни выполнены в форме трапеции, меньшей стороной соединенной с шарниром;
- плоские пальцы снабжены средством для адгезии к поверхности перемещения.
Выполнение ног в виде зигзага из четырех ортогонально соединенных балок, первая из которых закреплена перпендикулярно боковой поверхности корпуса, вторая расположена параллельно боковой поверхности корпуса под углом не менее 30 угловых градусов к поверхности перемещения и ориентирована в направлении движения микроробота, и снабжение всех балок кроме первой микроактюаторами, а третья балка выполнена из двух частей, соединенных между собой шарниром позволяет создать кинематическую схему с несколькими степенями свободы и тем самым обеспечить адаптацию каждой ноги к поверхности перемещения независимо от изменения ее рельефа. При этом экспериментально установлено, что для реализации процесса движения микроробота с использованием ног предложенной конструкции их число должно быть не менее чем шесть.
Снабжение четвертой балки ступней, соединенной с балкой шарниром позволяет повысить устойчивость робота на поверхности со сложным профилем, а ее выполнение в виде не менее трех плоских пальцев, их соединение в шарнире и снабжение термомеханическими актюаторами повысить адаптацию к такой поверхности. Наиболее целесообразно выполнять пальцы в форме трапеции меньшей стороной соединенной с шарниром, обеспечивающим адаптацию ступни к неоднородностям поверхности перемещения. Дополнительное снабжение пальцев средством для адгезии к поверхности перемещения позволит повысить устойчивость робота на поверхности со сложным профилем и фиксацию на поверхности перемещения в условиях микрогравитации.
Сущность заявляемого шагающего мобильного микроробота поясняется примером реализации и чертежами. На фиг. 1 представлена схематично конструкция одной ноги мобильного микроробота, охарактеризованной в первом пункте формулы изобретения (вид сверху на поверхность перемещения). На фиг. 2 представлена схематично конструкция одной ноги мобильного микроробота, снабженной ступней (вид сверху на поверхность перемещения). На фиг. 3 представлен схематично фрагмент микроробота (вид сбоку) поясняющий расположение составных звеньев ноги относительно корпуса и поверхности перемещения. На фиг.4 представлен схематично вариант конструкции ступни ноги мобильного микроробота. На фиг. 5 представлен схематично вид сверху вариант конструкции шагающего мобильного микроробота.
Шагающий мобильный микроробот, содержит корпус 1, систему управления движением (не показана) и движитель 2 и 2* (см. фиг. 5) в виде нескольких ног. Каждая из ног выполнена в виде зигзага из четырех ортогонально соединенных балок, первая из которых 3 закреплена перпендикулярно боковой поверхности корпуса, вторая 4 расположена параллельно боковой поверхности корпуса под углом не менее 30 угловых градусов к поверхности перемещения и ориентирована в направлении движения 13. Поскольку предполагается обеспечение возможности движения микроробота в двух направлениях - вперед и назад, то для этого и ноги ориентируют соответствующим образом- часть в направлении движения вперед, а часть для движения назад (см. фиг. 5). Третья балка 5 выполнена из двух частей, соединенных между собой шарниром 6. Вторая балка 4, третья балка 5 и четвертая балка 7 снабжены термомеханическими актюаторами 8. Для обеспечения процесса перемещения микроробот снабжен не менее чем шестью такими ногами. В частных случаях реализации ноги робота могут быть снабжены ступнями 10, соединенными через шарнир 9 с четвертой балкой 7. Ступни 10 выполнены состоящими из плоских пальцев 10*, и снабжены актюаторами 11 и средством 12 для адгезии к поверхности перемещения. Все конструктивные элементы, входящие в состав микроробота выбираются из числа известных, а система управления снабжается программой, обеспечивающей функционирование микроробота.
Шагающий мобильный микроробот функционирует следующим образом. Балка 3 жестко закреплена на корпусе 1. При соприкосновении с неровной поверхностью перемещения пальцами 10*, снабженными средством для адгезии к поверхности перемещения 12 включаются термомеханические актюаторы 8 и 11 не менее трех ног движителя 2 или 2*, расположенные на противоположных сторонах корпуса, прикрепляются к поверхности перемещения. Затем не менее трех ног движителя 2, не закрепленные на поверхности перемещения деформируются под действием актюаторов 8 (деформация балок и пальцев показана стрелками на фиг. 3) совершают перемещение в направлении движения микроробота 13*, прикрепляются к поверхности перемещения, затем уже ранее прикрепленные ноги открепляются от поверхности перемещения и цикл повторяется. Термомеханические актюаторы 11, расположенные на каждом из плоских пальцев 10* и шарниры 6 (на фиг. 3 не показан) и 9 необходимы для адаптации ступни 10 к неровной поверхности перемещения. Это происходит в случае, если неровность поверхности перемещения соизмерима с размерами ступни 10. Каждый из пальцев ступни 10 (обозначено 10*) адаптируется к 3D неровностям поверхности перемещения путем деформации актюаторов 11. При необходимости поворота микроробота одна из линеек ног (например, 2 относительно 2*) движителя движется быстрее другой. Развернутая на угол не менее 30 угловых градусов вторая балка 4, шарниры 6 и 9 обеспечивают преодоление микророботом неровностей поверхности и/или ступенек. Таким образом, конструкция позволяет создать кинематическую схему с несколькими степенями свободы и тем самым обеспечить адаптацию каждой ноги к поверхности перемещения независимо от ее рельефа.
Список литературы.
1. Erdem E.Y., Chen Y.M., Mohebbi М., Darling R.B.,  Suh J.W., Kovacs G.T.A. Thermally Actuated Omnidirectional Walking Microrobot. Journal of Microelectromechanical Systems, 2010; 19 (3). C. 433-442.
Suh J.W., Kovacs G.T.A. Thermally Actuated Omnidirectional Walking Microrobot. Journal of Microelectromechanical Systems, 2010; 19 (3). C. 433-442.
2. Патент РФ №2642020, МПК B62D 57/032, опубл. 28.12.2017
3. Патент РФ №2164362, МПК 25J 7/00, опубл. 20.03.2001
4. Патент РФ №2566454, МПК 25J 11/00, опубл. 20.09.2015
| название | год | авторы | номер документа |
|---|---|---|---|
| Ползающий космический микроробот-инспектор | 2021 |
|
RU2771501C1 |
| Ступня ноги для шагающего космического микроробота | 2017 |
|
RU2675327C1 |
| Ступня ноги шагающего космического микроробота | 2017 |
|
RU2667594C1 |
| МИКРОСИСТЕМНЫЙ КОСМИЧЕСКИЙ РОБОТ-ИНСПЕКТОР (ВАРИАНТЫ) | 2014 |
|
RU2566454C2 |
| Ступня ноги шагающего космического микромеханизма | 2017 |
|
RU2667593C1 |
| Космический мобильный робот-инспектор | 2022 |
|
RU2783640C1 |
| МИКРОСИСТЕМНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПОВЕРХНОСТЬЮ ДЛЯ КРЕПЛЕНИЯ МАЛОГАБАРИТНОЙ АНТЕННЫ | 2011 |
|
RU2456720C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2642020C2 |
| ВНУТРИТРУБНЫЙ УПРУГИЙ МИКРОРОБОТ С УПРАВЛЯЕМОЙ ПЬЕЗОАКТЮАТОРОМ ФОРМОЙ | 2018 |
|
RU2690258C1 |
| МИКРОСХЕМА С МИКРОЭЛЕКТРОМЕХАНИЧЕСКОЙ ЗАЩИТОЙ ОТ ЭЛЕКТРИЧЕСКИХ И/ИЛИ ТЕПЛОВЫХ ПЕРЕГРУЗОК | 2011 |
|
RU2466496C1 |





Изобретение относится к микроробототехнике, а именно к шагающим мобильным микророботам, и предназначено для осуществления работ в экстремальных ситуациях, преимущественно в условиях открытого космоса, невесомости, микрогравитации и выполнения задач напланетных миссий. Шагающий мобильный микроробот содержит корпус, систему управления движением и движитель в виде ног, приводимых в движение термомеханическими микроактюаторами. Каждая из ног выполнена в виде зигзага из четырех ортогонально соединенных балок. Первая балка закреплена перпендикулярно боковой поверхности корпуса. Вторая балка расположена параллельно боковой поверхности корпуса под углом не менее 30 угловых градусов к поверхности перемещения и ориентирована в направлении движения микроробота. Третья балка выполнена из двух частей, соединенных между собой шарниром. А к четвертой балке присоединена шарниром ступня, состоящая из пальцев, снабженных термомеханическими актюаторами. Все балки кроме первой снабжены термомехническими микроактюаторами. При этом микроробот имеет не менее чем шесть ног. Изобретение обеспечивает повышение возможности адаптации к поверхности, имеющей сложный профиль. 3 з.п. ф-лы, 5 ил.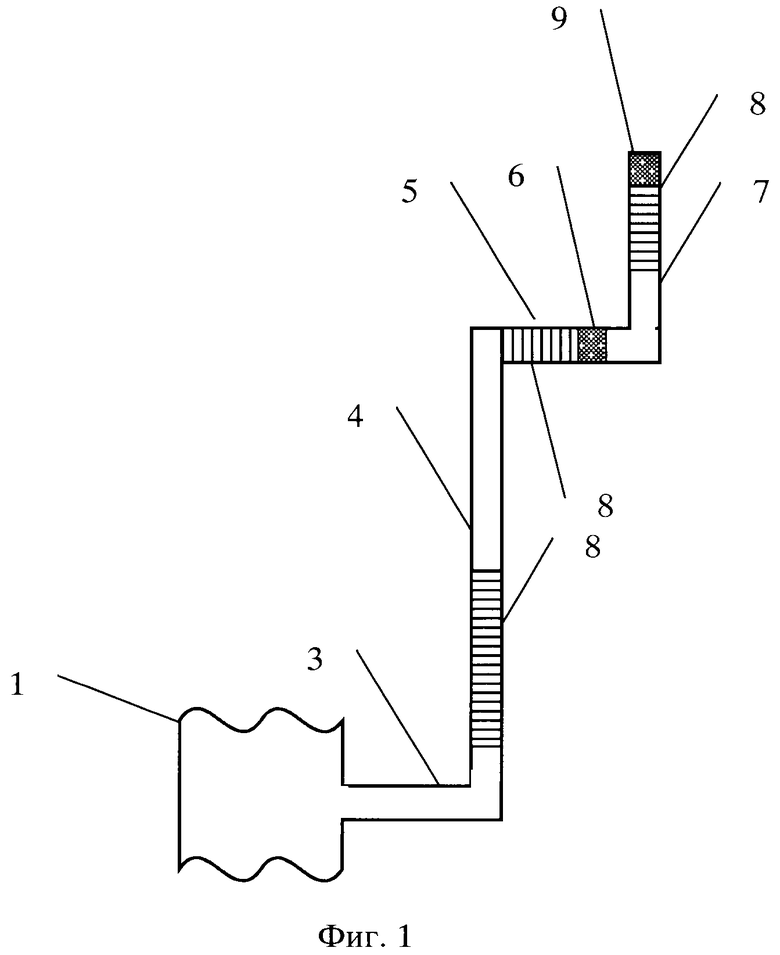
1. Шагающий мобильный микроробот, содержащий корпус, систему управления движением и движитель в виде ног, приводимых в движение термомеханическими микроактюаторами, отличающийся тем, что каждая из ног выполнена в виде зигзага из четырех ортогонально соединенных балок, первая из которых закреплена перпендикулярно боковой поверхности корпуса, вторая расположена параллельно боковой поверхности корпуса под углом не менее 30 угловых градусов к поверхности перемещения и ориентирована в направлении движения микроробота, все балки, кроме первой, снабжены термомехническими микроактюаторами, третья балка выполнена из двух частей, соединенных между собой шарниром, а к четвертой балке присоединена шарниром ступня, состоящая из пальцев, снабженных термомеханическими актюаторами, при этом микроробот имеет не менее чем шесть ног.
2. Микроробот по п. 1, отличающийся тем, что ступня выполнена в виде не менее трех плоских пальцев.
3. Микроробот по п. 2, отличающийся тем, что плоские пальцы ступни выполнены в форме трапеции, меньшей стороной соединенной в шарнире.
4. Микроробот по п. 2, отличающийся тем, что плоские пальцы снабжены средством для адгезии к поверхности перемещения.
| МИКРОСИСТЕМНЫЙ КОСМИЧЕСКИЙ РОБОТ-ИНСПЕКТОР (ВАРИАНТЫ) | 2014 |
|
RU2566454C2 |
| JP 7237154 A, 12.09.1995 | |||
| US 6681150 B1, 20.01.2004 | |||
| US 20040119435 A1, 24.06.2004 | |||
| US 10011010 B2, 03.07.2018 | |||
| CN 201784730 U, 06.04.2011. | |||

